A Sparse Representation Method for DOA Estimation With Unknown Mutual Coupling
4
1210 IEEE ANTENNAS AND WIRELESS PROPAGATION LETTERS, VOL. 11, 2012 A Sparse Representation Method for DOA Estimation With Unknown Mutual Coupling Jisheng Dai, Member, IEEE, Dean Zhao, and Xiaofu Ji Abstract—Sparse representation methods for direction-of-ar- rival (DOA) estimation have been applied to many situations, which include limited number of collected snapshots and highly correlated sources. However, they suffer from a lack of provision for mutual coupling effect. This letter describes a modified sparse representation method in the presence of unknown mutual cou- pling. The new method takes advantage of the special structure of the mutual coupling matrix (MCM) for uniform linear arrays (ULAs) so as to eliminate the mutual coupling effect completely. Simulation results verify the efficiency of the proposed method. Index Terms—Direction of arrival (DOA), mutual coupling, sparse representation, uniform linear array (ULA). I. INTRODUCTION D IRECTION-OF-ARRIVAL (DOA) estimation has attracted tremendous interest since there are many real-world problems where accurate acquisition of source directions is essential, e.g., in radar, sonar, radio astronomy, and mobile communications. During the development in this discipline over the decades, the conventional subspace-type DOA estimation methods [1] (such as MUSIC, ESPRIT, and GEESE) have dominated in the literature due to their high-res- olution performance. Recently, the emerging field of sparse representations has given renewed interest to the problem of DOA esti- mation. Gorodnitsky et al. proposed a recursive weighted minimum-norm algorithm called FOCUSS to achieve sparsity for the problem of DOA estimation [2]. Fuchs attempted to represent the vector of beamformer outputs as a sparse linear combination of vectors from a basis of beamformer outputs [3]. Malioutov et al. extended the idea of enforcing sparsity to a general framework using -SVD method [4], which is appli- cable to a wide variety of practical DOA estimation problems. Some recently proposed methods including sparse iterative covariance-based estimation [5] and sparse representation of array covariance [6] try to estimate DOAs in the correlation domain instead of the data domain. Manuscript received July 17, 2012; revised September 16, 2012; accepted October 03, 2012. Date of publication October 09, 2012; date of current ver- sion October 25, 2012. This work was supported in part by the National Sci- ence Foundation of China under Grants 61102054 and 60904011, the Doctoral Fund of Ministry of Education of China under Grant 20093227120010, and the Research Foundation for Advanced Talents, Jiangsu University, under Grant 10JDG109. The authors are with the School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China (e-mail: [email protected]; [email protected]; [email protected]). Color versions of one or more of the figures in this letter are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/LAWP.2012.2223651 Sparse representation methods exhibit a number of advan- tages over other DOA estimation methods. These include in- creased resolution and improved robustness to noise, limited number of snapshots, and correlation of signals [4]. However, they suffer from a lack of provision for imperfections such as unknown or misspecified mutual coupling, imperfectly known sensor positions and orientations, gain, and phase imbalances. Without array manifold calibration, the performance of DOA estimation may degrade substantially. A number of calibration methods have been proposed to deal with mutual coupling ef- fect [7]–[12]. To the best of our knowledge, however, there is no sparse representation method that can compensate for the mu- tual coupling effect. The main objective of this letter is to pro- vide a sparse representation method for DOA estimation in the presence of unknown mutual coupling. By making use of the special structure of the mutual coupling matrix (MCM) for uni- form linear arrays (ULAs), the mutual coupling effect can be eliminated by the inherent mechanism of the proposed method. Several simulation results are presented to evaluate the perfor- mance of the proposed method. II. DATA MODEL Consider narrowband far-field signals impinging on an -element ULA, where the distance between adjacent sensors is . The signals, , arrive at the array from distinct directions, , with respect to the normal line of the array. The array output vector is then given by (1) where , and . The noises , are uncorrelated with a common variance , and and are zero mean wide-sense stationary random precesses. The matrix is the MCM for ULAs. Many theoretical or experimental studies have addressed the model of mutual coupling, and they demonstrate that a banded symmetric Toeplitz MCM can provide a good approximation of real-world situations [13]. Moreover, it is reasonable to approximate the mutual coupling coefficient as zero between two sensors that are far enough away from each other because the mutual coupling coefficient between two sensors is inversely proportional to their distance. Therefore, the MCM is expressed generally as a banded symmetric Toeplitz matrix with just a few nonzero coefficients [7]–[12]. Let 1536-1225/$31.00 © 2012 IEEE
Transcript of A Sparse Representation Method for DOA Estimation With Unknown Mutual Coupling

1210 IEEE ANTENNAS AND WIRELESS PROPAGATION LETTERS, VOL. 11, 2012
A Sparse Representation Method for DOA EstimationWith Unknown Mutual Coupling
Jisheng Dai, Member, IEEE, Dean Zhao, and Xiaofu Ji
Abstract—Sparse representation methods for direction-of-ar-rival (DOA) estimation have been applied to many situations,which include limited number of collected snapshots and highlycorrelated sources. However, they suffer from a lack of provisionfor mutual coupling effect. This letter describes a modified sparserepresentation method in the presence of unknown mutual cou-pling. The new method takes advantage of the special structureof the mutual coupling matrix (MCM) for uniform linear arrays(ULAs) so as to eliminate the mutual coupling effect completely.Simulation results verify the efficiency of the proposed method.
Index Terms—Direction of arrival (DOA), mutual coupling,sparse representation, uniform linear array (ULA).
I. INTRODUCTION
D IRECTION-OF-ARRIVAL (DOA) estimation hasattracted tremendous interest since there are many
real-world problems where accurate acquisition of sourcedirections is essential, e.g., in radar, sonar, radio astronomy,and mobile communications. During the development in thisdiscipline over the decades, the conventional subspace-typeDOA estimation methods [1] (such as MUSIC, ESPRIT, andGEESE) have dominated in the literature due to their high-res-olution performance.Recently, the emerging field of sparse representations
has given renewed interest to the problem of DOA esti-mation. Gorodnitsky et al. proposed a recursive weightedminimum-norm algorithm called FOCUSS to achieve sparsityfor the problem of DOA estimation [2]. Fuchs attempted torepresent the vector of beamformer outputs as a sparse linearcombination of vectors from a basis of beamformer outputs [3].Malioutov et al. extended the idea of enforcing sparsity to ageneral framework using -SVD method [4], which is appli-cable to a wide variety of practical DOA estimation problems.Some recently proposed methods including sparse iterativecovariance-based estimation [5] and sparse representation ofarray covariance [6] try to estimate DOAs in the correlationdomain instead of the data domain.
Manuscript received July 17, 2012; revised September 16, 2012; acceptedOctober 03, 2012. Date of publication October 09, 2012; date of current ver-sion October 25, 2012. This work was supported in part by the National Sci-ence Foundation of China under Grants 61102054 and 60904011, the DoctoralFund of Ministry of Education of China under Grant 20093227120010, and theResearch Foundation for Advanced Talents, Jiangsu University, under Grant10JDG109.The authors are with the School of Electrical and Information Engineering,
Jiangsu University, Zhenjiang 212013, China (e-mail: [email protected];[email protected]; [email protected]).Color versions of one or more of the figures in this letter are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/LAWP.2012.2223651
Sparse representation methods exhibit a number of advan-tages over other DOA estimation methods. These include in-creased resolution and improved robustness to noise, limitednumber of snapshots, and correlation of signals [4]. However,they suffer from a lack of provision for imperfections such asunknown or misspecified mutual coupling, imperfectly knownsensor positions and orientations, gain, and phase imbalances.Without array manifold calibration, the performance of DOAestimation may degrade substantially. A number of calibrationmethods have been proposed to deal with mutual coupling ef-fect [7]–[12]. To the best of our knowledge, however, there is nosparse representation method that can compensate for the mu-tual coupling effect. The main objective of this letter is to pro-vide a sparse representation method for DOA estimation in thepresence of unknown mutual coupling. By making use of thespecial structure of the mutual coupling matrix (MCM) for uni-form linear arrays (ULAs), the mutual coupling effect can beeliminated by the inherent mechanism of the proposed method.Several simulation results are presented to evaluate the perfor-mance of the proposed method.
II. DATA MODEL
Consider narrowband far-field signals impinging on an-element ULA, where the distance between adjacent sensors
is . The signals, , arrive at the arrayfrom distinct directions, , with respect to thenormal line of the array. The array output vectoris then given by
(1)
where
, and .The noises , are uncorrelated witha common variance , and and are zeromean wide-sense stationary random precesses. The matrix
is the MCM for ULAs. Many theoretical orexperimental studies have addressed the model of mutualcoupling, and they demonstrate that a banded symmetricToeplitz MCM can provide a good approximation ofreal-world situations [13]. Moreover, it is reasonable toapproximate the mutual coupling coefficient as zero betweentwo sensors that are far enough away from each otherbecause the mutual coupling coefficient between two sensorsis inversely proportional to their distance. Therefore, theMCM is expressed generally as a banded symmetric Toeplitzmatrix with just a few nonzero coefficients [7]–[12]. Let
1536-1225/$31.00 © 2012 IEEE

DAI et al.: SPARSE REPRESENTATION METHOD FOR DOA ESTIMATION WITH UNKNOWN MUTUAL COUPLING 1211
nonzero complex coefficients be in the MCM, then we have, where = with
and denotes asymmetric Toeplitz matrix constructed by the vector .
III. REVIEW OF THE -SVD ALGORITHM IN THE ABSENCEOF MUTUAL COUPLING
In this section, we will review the -SVD algorithm.Withoutmutual coupling (or in the presence of known mutual coupling),the array output becomes
(2)
Denoting , and, we have
(3)
Let the singular value decomposition (SVD) of be written inthe form of
(4)
where and are unitary ma-trices whose columns are the singular vectors correspondingto the largest singular values, while the columns of
and are the sin-gular vectors corresponding to the rest singular values.Using (3) and defining , we then obtain
(5)
where and . In order to cast DOA es-timation problem as a sparse representation one, let denote theset of possible locations, and let be a generic location param-eter. Also, let denote a grid that covers . If the grid isfine enough such that the true DOAs lie on (or, practically, closeto) the grid, we can use the following nonparametric model for
:
(6)
where and is acomplex matrix whose th row corresponds to the signal im-pinging on the array from a possible source at . It is easy toverify that the th row is nonzero and equals to the th row of
if signal comes from for some , and zero otherwise.As a result, we are able to exchange the problem of DOA es-timation for the problem of estimating which rows in arenonzero.Since the sample size is much larger than the number of
signals has only a few nonzero rows, in other words,the spatial spectrum of is sparse. According to the -normminimization principle, we can estimate the matrix as thesolution to the following constrained minimization problem:
subject to (7)
where stands for the Frobenius norm and is avector whose th element equals the Euclidean norm of the
th row of , i.e., . The spatial samplesare combined using the -norm, which does enforce sparsity.Note that the way to choose has been described in [4]. Theupper value of with a 99% confidence interval is usedas a choice for .
IV. SPARSE REPRESENTATION METHOD WITH UNKNOWNMUTUAL COUPLING
In this section, we will propose a sparse representationmethod for DOA estimation in the presence of unknownmutual coupling. Following the convention in Section III, wedefine similarly as in (3)
(8)
and we rewrite it in the form of SVD
(9)
Then, (5) leads to
(10)
where , and . With thedefinition of can be expressed by
(11)
where is similarly defined as , whose th row correspondsto the signal impinging on the array from a possible source at .Obviously, (11), in its current form, cannot be transformed intoa sparse representation manner because it is a parametric modelwith unknown mutual coupling. As a result, we have to adopt adifferent approach. An alternative is to jointly optimize andas
subject to (12)
where . Unfortunately, it is a non-convex optimization problem, which cannot be solvedin polynomial time.1 To avoid solving such a complexoptimization problem, we introduce a constant matrix
into the constraint in(12)
(13)
Since , the upper value ofwith a 99% confidence interval is used as a choice
for . It is easy to see that ;therefore, only the center submatrix in is used to recover. At the first glance, it would be an unreasonable idea to
throw away the information contained in the edges of .However, this sacrifice is of great value to eliminate the effectof mutual coupling and derive a much simpler -norm mini-mization problem. To support this claim, we need the followinglemma (also see [11] and [12]).Lemma 1: Let be defined as earlier, then
where is a diagonal matrix.
1An algorithm is said to be of polynomial time if its running time is upper-bounded by a polynomial expression, i.e., for some constant .

1212 IEEE ANTENNAS AND WIRELESS PROPAGATION LETTERS, VOL. 11, 2012
Proof: Since the MCM is assumed to be a banded sym-metric Toeplitz matrix with nonzero coefficients, it is easy toverify that
...(14)
(15)
where . Therefore, we have
(16)
With the assistance of Lemma 1, we are capable of rewritingthe left side of (13) as
(17)
where . Since is a diagonal matrix, the th rowof must be a zero vector if the th row of is zero. Thus,the spatial spectrum of is also sparse. In order to recover therow-sparse matrix , we consider the following constrainedminimization problem:
subject to (18)
where . In contrast to the problem (12), theproblem (18) presents an interesting result that mutual couplingcoefficients enter completely into the new row-sparsematrix .In this case, finding DOAs in the presence of unknown mutualcoupling no longer requires to jointly optimize two variables( and ). The computational complexity of solving (18) thenstays the same with that of -SVD.It is noteworthy that the solutions to problems (12) and (18)
may be distinct. We will discuss this issue in the rest of this sec-tion.Without loss of generality, assume that the first elementsin the grid are the true DOAs, i.e.,
. Also, assume that
(19)
• If and share a specific sparse structure. TheDOAs estimated from problems (12) and (18) are identical.
• If , the spatial spectrum of is sparser than thatof . It is evident that (18) can only resolve the firstDOAs. This is due to the so-called “blind angle” phenom-enon discussed in [8]. acts as a beam pattern with at most
null angles. If signals come from these null angles (e.g.,), the received signals at the middle
sensors will be forced to be zero. Hence, “blindangle” phenomenon will result in substantially degradedperformance of DOA estimation. Fortunately, since isa continuous function for given coupling coefficients, theprobability of has ameasure of zero. In other words,“blind angle” phenomenon rarely happens in practice.
Fig. 1. RMSE of DOA estimate against SNR.
Remark 1: The computational complexity of solving(18) through second-order cone (SOC) programming is
[4], which is much higher than that of sub-space-type method. To fill in this gap, we can adopt a recursivegrid refinement procedure. That is: 1) create a rough grid andget the estimates of the DOAs; 2) get a refined grid around thelocations of the peaks and update the estimates of the DOAs;3) return to step 2 until the grid is fine enough.Remark 2: Sparse representation methods assume that the
true DOAs are located on the predefined spatial grid. However,this assumption is not always valid in practical implementations.Fortunately, the DOA estimation on a rough grid is near the trueDOAs. Hence, the recursive grid refinement procedure can alsofill in this gap.
V. SIMULATION RESULTS
In this section, we will present several simulation results to il-lustrate the performance of our proposed method. We will com-pare the proposed method to -SVD and the methods in [9]and [10], as well as the square-root of Cramer–Rao lower bound(CRLB) for DOA estimation.Simulation 1 considers a scenario where a ULA composed of
sensors is used to receive uncorrelated sig-nals coming from and , and the numberof mutual coupling coefficients is with
[11]. Fig. 1 shows the root mean square error (RMSE)of DOA estimation versus input SNR computed via 200 MonteCarlo runs, where the number of snapshots is . Notethat we have used the adaptive grid refinement approach to re-duce complexity and improve accuracy, where 1 uniform sam-pling is used for the rough grid and then 0.1 is used for therefined grid. The result illustrates that our method outperformsthe calibration methods proposed in [9] and [10]. We also seethat the performance of -SVD degrades substantially, because-SVD suffers from a lack of provision for mutual couplingeffect.Simulation 2 investigates the capability of resolving closely
spaced sources with limited snapshots for severalmethods. The simulation considers a scenario where a ULAcomposed of sensors is used to receive un-correlated signals coming from and ,
DAI et al.: SPARSE REPRESENTATION METHOD FOR DOA ESTIMATION WITH UNKNOWN MUTUAL COUPLING 1213
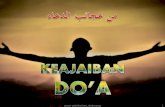
Fig. 2. Resolution probability against SNR for closely spaced sources.
Fig. 3. DOA estimation in the case of “blind angle”.
and the number of mutual coupling coefficients is withand . We say that the two signals
are resolved in a given run, if is smallerthan , where stands for the estimated DOA forthe th signal. As can be seen from Fig. 2, the resolution per-formance of our method outperforms others. Note that -SVDadopts the same working array aperture as our method for thepurpose of comparison. The superior resolution performanceof sparse representation is natural, which is consistent with thesimulation results in the absence of mutual coupling.Simulation 3 addresses the “blind angle” phenomenon. It con-
siders a scenario where a ULA composed of sensorsis used to receive uncorrelated signals coming from
, and , and the numberof mutual coupling coefficients is with
and . It is easy to verify that deficiencyoccurs at . The number of snapshots is 30, and SNR is10 dB. Fig. 3 illustrates that our method fails in estimating theDOA from , but succeeds in obtaining the DOAs fromother directions. Although -SVD and the method in [10] usethe whole array to estimate DOAs, they still miss . Thissimulation result is consistent with our discussion in Section IV.
VI. CONCLUSION
We have proposed a sparse representation method that ap-proaches the problem of DOA estimation with mutual coupling.The proposed method can be seen as a practical extension of-SVD, which eliminates the effect of mutual coupling by itsinherent mechanism. Similar to the methods developed in [8]and [9], the main shortcoming of the new method is that theworking array aperture is reduced by a factor of . For futurework, it will be interesting to see if one can extend the results todifferent array configurations and wideband scenarios.
REFERENCES
[1] H. Krim and M. Viberg, “Two decades of array signal processing re-search,” IEEE Signal Process. Mag., vol. 13, pp. 67–94, Jul. 1996.
[2] I. F. Gorodnitsky and B. D. Rao, “Sparse signal reconstruction fromlimited data using FOCUSS: a re-weighted minimum norm algorithm,”IEEE Trans. Signal Process., vol. 45, no. 3, pp. 600–616, Mar. 1997.
[3] J. J. Fuchs, “On the application of the global matched filter to DOAestimation with uniform circular arrays,” IEEE Trans. Signal Process.,vol. 49, no. 4, pp. 702–709, Apr. 2001.
[4] D. Malioutov, M. Cetin, and A. S. Willsky, “A sparse signal recon-struction perspective for source localization with sensor arrays,” IEEETrans. Signal Process., vol. 53, no. 8, pp. 3010–3022, Aug. 2005.
[5] P. Stoica, P. Babu, and J. Li, “SPICE: A sparse covariance-based es-timation method for array processing,” IEEE Trans. Signal Process.,vol. 59, no. 2, pp. 629–638, Feb. 2011.
[6] J. Yin and T. Chen, “Direction-of-arrival estimation using a sparse rep-resentation of array covariance vectors,” IEEE Trans. Signal Process.,vol. 59, no. 2, pp. 629–638, Feb. 2011.
[7] B. Friedlander and A. J. Weiss, “Direction finding in the presence ofmutual coupling,” IEEE Trans. Antennas Propag., vol. 39, no. 3, pp.277–284, Mar. 1991.
[8] Z. Ye and C. Liu, “On the resiliency ofMUSIC direction finding againstantenna sensor coupling,” IEEE Trans. Antennas Propag., vol. 56, no.2, pp. 371–380, Feb. 2008.
[9] Z. Ye, J. Dai, X. Xu, and X. Wu, “DOA estimation for uniform lineararray with mutual coupling,” IEEE Trans. Aerosp. Electron. Syst., vol.45, no. 1, pp. 280–288, Jan. 2009.
[10] F. Sellone and A. Serra, “A novel onlinemutual coupling compensationalgorithm for uniform and linear arrays,” IEEE Trans. Signal Process.,vol. 55, no. 2, pp. 560–573, Feb. 2007.
[11] J. Dai and Z. Ye, “Spatial smoothing for DOA estimation of coherentsignals in the presence of unknown mutual coupling,” IET SignalProcess., vol. 5, no. 4, pp. 418–425, 2011.
[12] J. Dai, W. Xu, and D. Zhao, “Real-valued DOA estimation for uniformlinear array with unknown mutual coupling,” Signal Process., vol. 92,pp. 2056–2065, 2012.
[13] H. T. Hui, “A new definition of mutual impedance for application indipole receiving antenna arrays,” IEEE Antennas Wireless Propag.Lett., vol. 3, pp. 364–367, 2004.







![An Approach to Power Allocation in MIMO Radar with Sparse ... · the DOA estimation problem is considered. Power allocation in [13] is carried out in a way to improve the sparse recovery](https://static.fdocuments.in/doc/165x107/5d34af1188c9933c738cf51a/an-approach-to-power-allocation-in-mimo-radar-with-sparse-the-doa-estimation.jpg)

![Doa - MSS682[Doa] [8]ff. Lengkap. MS 682 44 Title Doa - MSS682 Created Date 5/22/2012 2:04:42 PM ...](https://static.fdocuments.in/doc/165x107/60c972f9155ec71f36674290/doa-mss682-doa-8ff-lengkap-ms-682-44-title-doa-mss682-created-date-5222012.jpg)