A Novel Variable Transmission with Digital Hydraulicscga/c/1417.pdf · A Novel Variable...
6
A Novel Variable Transmission with Digital Hydraulics Zhenyu Gan, Katelyn Fry, R. Brent Gillespie, Member, IEEE, and C. David Remy, Member, IEEE Abstract— This paper presents a novel variable transmission system that is based on the concept of digital hydraulics. In the proposed system, sets of rolling-diaphragm cylinders are mounted via different effective lever arms to an input and output joint. A variable subset of these cylinders is connected via three-way two-position on/off valves to a common hydraulic manifold. This introduces a controllable constraint on the hydraulic flow and creates a programmable hydraulic transmission. With three single-acting cylinders, we could realize 37 different transmission ratios. We investigated the nonholonomic flow constraint analytically, in simulation, and with an experimental prototype. Using water as fluid, we show that a very stiff transmission (124.2 Nm/rad) can be achieved within the range of ±6 ◦ . Theoretical transmission ratios are tracked with R-squared values of more than 0.996 and backlash is smaller than 1.4%. Furthermore, we show the applicability of the proposed transmission in the simulation of a body-powered knee-ankle exoskeleton. I. I NTRODUCTION Actuation remains one of the great challenges in robotic systems. Particularly for systems that require large torques at slow velocities, the currently preferred solution of electric motors is not always ideal [1], [2]. While electric motors are well-suited for computerized control, they can only produce low torques and thus require large gearboxes or other transmission systems. The drawbacks of using multi-stage gearboxes include a large reflected inertia, high impedance, backlash, and overall low efficiency. Additionally, these added components lead to a low torque-to-weight ratio. [3]. These drawbacks are particularly undesirable for embodied portable robotic devices such as rehabilitation robots or exoskeletons [4], [5]. Hydraulic systems can overcome some of these drawbacks as they have a much higher torque density and thus do not require additional transmissions. Yet, traditional hydraulic actuators introduce substantial mechanical losses due to the large friction forces created by the O-ring seals. Addition- ally, the closed-loop control of hydraulic actuators typically relies on the use of spool valves. These valves generate a large pressure drop at the valve, which leads to substantial power losses. Especially when systems are operated close to a steady state, where large pressure drops across a very small orifice require higher supply pressure and input power. This typically require system components over-sizing, and external cooling systems may be needed.[6]. The authors are with the Robotics and Motion Laboratory (RAMlab), Department of Mechanical Engineering, University of Michigan, Ann Arbor, MI ([email protected], [email protected], [email protected], [email protected]) Funding for this project was provided by NIH (GRANT: 1-R01-EB019834-2014 “Wearable eMbots to Induce Recovery of Function”). Fig. 1. The experimental prototype for this project shown in (a) consists of two pendulums as input and output. Different combinations of the active cylinders can be used to achieve a large number of different transmission ratios. The CAD model of this setup is shown in (b). To overcome the problem of fluid power losses in spool valves, researchers have proposed digital hydraulic technol- ogy [7], [8], [9]. Rather than using continuously varying servo-valves, digital hydraulic technology typically relies on multiple simple on/off-components that are connected in parallel. Different flow-rates and active cylinder areas are achieved via a binary ‘coding’ of differently sized components [9]. An example is a Digital Fluid Control Unit (DFCU) that mimics the function of a spool valve via an array of simple solenoid valves [10]. These properties make digital hydraulics an interesting solution for a variable hydraulic transmission system. Whitney et al. [11] have recently presented a highly efficient hydraulic transmission with a fixed transmission ratio. Their solution is based on pairs of rolling diaphragm- sealed cylinders that are acting in a antagonistic fashion. In contrast to traditional cylinders, the pistons of these cylinders are sealed with a diaphragm made of nitrile rubber. This con- 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany 978-1-4799-9993-4/15/$31.00 ©2015 IEEE 5838
Transcript of A Novel Variable Transmission with Digital Hydraulicscga/c/1417.pdf · A Novel Variable...

A Novel Variable Transmission with Digital Hydraulics
Zhenyu Gan, Katelyn Fry, R. Brent Gillespie, Member, IEEE, and C. David Remy, Member, IEEE
Abstract— This paper presents a novel variable transmissionsystem that is based on the concept of digital hydraulics.In the proposed system, sets of rolling-diaphragm cylindersare mounted via different effective lever arms to an inputand output joint. A variable subset of these cylinders isconnected via three-way two-position on/off valves to a commonhydraulic manifold. This introduces a controllable constrainton the hydraulic flow and creates a programmable hydraulictransmission. With three single-acting cylinders, we couldrealize 37 different transmission ratios. We investigated thenonholonomic flow constraint analytically, in simulation, andwith an experimental prototype. Using water as fluid, we showthat a very stiff transmission (124.2 Nm/rad) can be achievedwithin the range of ±6◦. Theoretical transmission ratios aretracked with R-squared values of more than 0.996 and backlashis smaller than 1.4%. Furthermore, we show the applicability ofthe proposed transmission in the simulation of a body-poweredknee-ankle exoskeleton.
I. INTRODUCTION
Actuation remains one of the great challenges in roboticsystems. Particularly for systems that require large torquesat slow velocities, the currently preferred solution of electricmotors is not always ideal [1], [2]. While electric motorsare well-suited for computerized control, they can onlyproduce low torques and thus require large gearboxes or othertransmission systems. The drawbacks of using multi-stagegearboxes include a large reflected inertia, high impedance,backlash, and overall low efficiency. Additionally, theseadded components lead to a low torque-to-weight ratio. [3].These drawbacks are particularly undesirable for embodiedportable robotic devices such as rehabilitation robots orexoskeletons [4], [5].
Hydraulic systems can overcome some of these drawbacksas they have a much higher torque density and thus do notrequire additional transmissions. Yet, traditional hydraulicactuators introduce substantial mechanical losses due to thelarge friction forces created by the O-ring seals. Addition-ally, the closed-loop control of hydraulic actuators typicallyrelies on the use of spool valves. These valves generate alarge pressure drop at the valve, which leads to substantialpower losses. Especially when systems are operated closeto a steady state, where large pressure drops across a verysmall orifice require higher supply pressure and input power.This typically require system components over-sizing, andexternal cooling systems may be needed.[6].
The authors are with the Robotics and Motion Laboratory (RAMlab),Department of Mechanical Engineering, University of Michigan, AnnArbor, MI ([email protected], [email protected],[email protected], [email protected]) Funding for thisproject was provided by NIH (GRANT: 1-R01-EB019834-2014 “WearableeMbots to Induce Recovery of Function”).
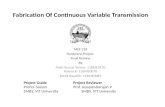
Fig. 1. The experimental prototype for this project shown in (a) consistsof two pendulums as input and output. Different combinations of the activecylinders can be used to achieve a large number of different transmissionratios. The CAD model of this setup is shown in (b).
To overcome the problem of fluid power losses in spoolvalves, researchers have proposed digital hydraulic technol-ogy [7], [8], [9]. Rather than using continuously varyingservo-valves, digital hydraulic technology typically relieson multiple simple on/off-components that are connectedin parallel. Different flow-rates and active cylinder areasare achieved via a binary ‘coding’ of differently sizedcomponents [9]. An example is a Digital Fluid ControlUnit (DFCU) that mimics the function of a spool valve viaan array of simple solenoid valves [10]. These propertiesmake digital hydraulics an interesting solution for a variablehydraulic transmission system.
Whitney et al. [11] have recently presented a highlyefficient hydraulic transmission with a fixed transmissionratio. Their solution is based on pairs of rolling diaphragm-sealed cylinders that are acting in a antagonistic fashion. Incontrast to traditional cylinders, the pistons of these cylindersare sealed with a diaphragm made of nitrile rubber. This con-
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)Congress Center HamburgSept 28 - Oct 2, 2015. Hamburg, Germany
978-1-4799-9993-4/15/$31.00 ©2015 IEEE 5838

struction greatly reduces mechanical friction in the seals. Theauthors have demonstrated a fixed transmission between twopairs of cylinders that are connected directly with each otherand were pre-pressurized. This master-slave configurationallows a nearly loss-less transmission over large distancesand is virtually free from hysteresis, backlash, and reflectedinertia. Such a transmission allows one to locate a heavytorque source away from the actuated joint, thereby enablinglightweight systems with low inertia. However, since thetransmission ratio is fixed to a constant value, external powerand control on the drive side are needed to create a desiredmotion.
In the present paper, we demonstrate how these two recentdevelopments can be combined into a novel concept thatallows variable transmissions between two robotic joints. Tothis end, we combine the actuation concept of the passivefluid transmission (as presented in [11]) with a digitalvalve bank (as proposed in [9]) to create a lightweightand efficient variable transmission. We connect a number ofrolling diaphragm-sealed cylinders to the input and outputjoints of our system. The cylinders have different lever armsand thus create different relations between joint velocitiesand hydraulic flow-rates, and consequently between jointtorques and hydraulic pressures. A bank of 3/2-way solenoidvalves allows a variable connection between these cylinders,which realizes a large number of different transmission ratiosbetween the input and output joints. For a suitable choiceof lever arms a smooth set of discrete transmission ratios(both positive and negative) can be achieved. The resultingtransmission is lightweight, has very low impedance, and canbe modulated in its compliance by a choice of the hydraulicfluid and hose specifications.
This novel variable hydraulic transmission can be usefulin a wide range of robotic applications in which power mustbe routed between joints, or from a motorized drive to ajoint. Our work is inspired in particular by the idea of body-powered exoskeletons, in which such variable transmissionsare used to route power from healthy limbs to impaired limbsor to prosthetic devices. The variable transmission allowscomputer control of the transmission and thus enables a largevariety of possible motion trajectories. Since the system iscompletely passive, it is inherently safe and provides directforce-feedback to the user. An example of such a systemis shown in figure 6. Since the constraints are enforced onvelocity-level and not with respect to positions, the variabletransmission generates a variable, nonholonomic constraint.In other words, it allows the tracking of arbitrary outputtrajectories as long as there is some motion on the inputjoint.
In the remainder of this paper, we will present the underly-ing mathematical theory of creating velocity constraints viadigital hydraulics. We demonstrate the use of our approachwith a system composed of 6 single acting cylinders andpresent experimental data for multiple transmission ratios.Additionally, we use a detailed simulation of the hydraulicsystem to show the usage of the proposed system in theproblem of tracking a healthy ankle trajectory by using the
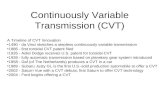
Fig. 2. Three cylinders are connected to the input and output joint,respectively. In this particular example (which shows our experimentalsetup) all cylinders have the same cross section Ai = 248mm2, butdifferent lever arms l1 = 25.4mm, l2 = 47.6mm, and l3 = 69.9mm.Via a set of valves, the cylinders are either connected to a common closedmanifold (shown: cylinders 1, 2, 4, and 6 with pressure pM ) or to an openreservoir (shown: cylinders 3 and 5 with pressure pR). This is expressedby a binary selection vector s = [1 1 0 1 0 1]T . For this valve setting, thetransmission ratio of the system is T = α/β = 0.233.
knee motion as power source.
II. THEORY
A. Creating Kinematic Constraints
The hydraulic system that creates the variable transmissionconsists of n single acting cylinders with individual crosssections Ai. The cylinders are connected to a rigid bodysystem with m joints with joint angles θj . This is shown infigure 2, for a system with two joints (θ = [α β]
T ) and 6cylinders. The displacement xi of each piston is a kinematicfunction of the joint angles x = f (θ). Consequently, thepiston velocities x depend in a linear fashion on the jointangle velocity θ: x = ∂f
∂θ θ. Assuming that the fluid isincompressible, the flow rate of each cylinder is given byQi = xiAi. Defining the matrix A as a diagonal matrix ofall n cylinder cross sections, we can compute a ‘flow-rate’Jacobian J ∈ Rn×m that yields the hydraulic flow rate as afunction of joint motion according to:
Q = Jθ,with J = A∂f
∂θ. (1)
This Jacobian determines the functionality of the variabletransmission. It can be designed for a specific applicationby choosing appropriate cross-sections, lever arms, and theoverall kinematic configuration of the system. The net flowof all cylinders QT =
∑ni=1Qi can be expressed in vector
notation as:QT = 1TJθ = j
Tθ, (2)
with 1 being an n-dimensional vector of ones used in the dotproduct to sum over the columns of J. The m-dimensionalvector j = JT1 is comprised of the sums over the columnsof J.
To create a variable transmission between joints, eachcylinder is either connected to a common manifold or toan open reservoir via a set of n three-way valves. Let thebinary vector s represent this set of valve settings. If a valveis connected to the common manifold, it is represented ins by a 1, otherwise by a 0. The sum of all flows goinginto the common manifold must be equal to zero, which
5839

enforces a kinematic constraint on velocity level. We expressthis constraint as the dot product:
sTQ = sTJθ = cT θ = 0, (3)
with the m-dimensional constraint vector c = JTs. Sincethis flow is zero, the flow into the reservoir is equal to thetotal flow:
QR = QT = jTθ. (4)
For a simple system with only two joints θ = [α β]T , the
constraint defined by eq. (3) can be interpreted as a variabletransmission T .
α
β= −c2
c1= T, (5)
in which c1 and c2 are altered by changing the valve settingsin s.
B. Forces and PressureThe transpose of the flow-rate Jacobian JT , maps a vector
of cylinder pressure values p to joint torques τ :
τ = JT (p− 1pA) , (6)
where pA is the ambient pressure of the system. Let pMdenote the pressure in the common manifold and pR thepressure in the reservoir. Assuming a loss-less system, withno pressure-drops along the hydraulic lines, we can rewriteeq. (6) as:
τ = JT [spM + (1− s) pR − 1pA] = (7)= JTs (pM − pR) + JT1 (pR − pA) =
= c (pM − pR) + j (pR − pA) .
The total power P that is produced by this system is givenby:
P = τT θ = (8)
= cT θ (pM − pR) + jTθ (pR − pA) =
= QR (pR − pA) ,
as cT θ = 0 per eq. (3) and QR = jTθ per eq (4). This
is the power that the system performs by pushing fluid intothe pressurized reservoir. Since we are interested in a puretransmission between joints, ideally this power would beequal to 0. We can achieve this by either setting the reservoirpressure pR equal to pA, or by sizing the cylinders and thekinematic structure to yield a Jacobian with j = 0. Note:Nonlinearities in the kinematics x = f (θ) can lead to aJacobian J (θ) that changes as a function of the joint anglesθ. In this case, the requirement j = 0 can only be fulfilledapproximately.
Under these assumptions, a simple system with two jointsthat experiences torques τ = [τα τβ ]
T , enables a transmis-sion of torques according to
τατβ
=c1c2. (9)
The pressure pM in the manifold that transmits these torquesis given by
pM = pR +ταc1
= pR +τβc2
(10)
To avoid negative pressure in the rolling diaphragm cylindersin the presence of torques τα and τβ with varying signs,a suitable high value for pR must be chosen to ensurepM − pA ≥ 0. Such a pressurization of the system haspotentially additional benefits. For example, it leads to astiffer transmission and reduces backlash [11]. Yet, as shownbefore, it is only possible for systems in which j = 0.
C. Design of the Flow-Rate Jacobian
Within this setup, different transmission ratios areachieved by changing the valve setting in s. With n valvesand cylinders, 2n settings can be achieved that are expressedby 2n different binary vectors of s. Some of these valuesmight be redundant. For example, any configuration of s thatdoes not connect cylinders on the output side to the commonmanifold will result in a transmission T = 0. A suitablechoice of lever arms and cylinder cross sections allows tuningthese transmission ratios to create a smooth variation over adesired range. It is notable that our formulation also allowsfor bi-articular cylinders that are connected to both the inputand output joint. Such cylinders would create multiple entriesin the flow-rate Jacobian J.
III. HARDWARE IMPLEMENTATION
To evaluate the theory of the proposed variable trans-mission system, we implemented a simple experimentalsetup with two joints (m = 2) and a total of six rollingdiaphragm cylinders (n = 6). The joints are simple pin jointswith a simple lever attached to them. Three cylinders wereconnected to each lever (Fig. 1).
The cylinders used in this setup were Small Bore Di-aphragm Cylinders (Control Air Inc., Amherst, NH) smallbore cylinders with an effective pressure area of Ai =248 mm2 and a stroke length of approximately 18 mm. Thesecylinders were assigned different lever arm lengths (l1 =25.4 mm, l2 = 47.6 mm, l3 = 69.9 mm, Fig. 2). In orderto achieve both positive and negative transmission ratios, thecylinders were oriented such that one cylinder per lever armwas acting in opposition to the two other cylinders. Thissetup leads to a linearization of the Jacobian around thevertical position of:
J =
[361 −676 991 0 0 00 0 0 361 −676 991
]Tcm3/rad
For this system j = [676 676]T 6= 0; that is, the total flow is
not zero and we should chose pR = pA. Since the lever armsare identical on both the input and the output joint, some ofthe 26 valve settings resulted in redundant transmission ratiosT . Still, this simple system allows 37 different transmissionratios (including transmission ratios of zero and infinity),spanning the range -4.29 to +4.29 (Fig. 3).
Each cylinder was connected to a 3/2 solenoid directionalvalve (ASCO, General Service Solenoid Valves, 8320G130).When the solenoid is energized (si = 1), the valve connectsthe corresponding cylinder to the common hydraulic mani-fold with pressure pM otherwise (si = 0) to the reservoirwith pressure pA. We used water as working fluid and
5840

Fig. 3. Shown are the sorted transmission ratios that arise from the 26
different valve settings of the example system shown in figure 2, a totalof 37 different transmission ratios spanning from -4.29 to +4.29. A finerresolution or larger range can potentially be obtained by optimizing the leverarms or adding more cylinders to the system.
Fig. 4. We evaluated the stiffness of the proposed hydraulic transmission byfixing the input shaft of the experimental prototype and varying the torqueτα of the output side while recording the output angle α. We formulated afairly linear stiffness law which approximates our system as a linear spring.The linearized stiffness of this system with a transmission ratio of -1 is124.2 Nm/rad.
conducted experiments in which the fluid in the reservoirwas not pressurized (pR = pA). Since in this configuration,eq. (10) can potentially yield negative pressures for varyingloads, we limited ourselves to a unidirectional transmissionof forces. To this end, we applied constant positive loads ταto the output joint.
The range of motion for both input and output jointswas kinematically limited to ±15 deg. Joint angles weremeasured with incremental encoders (Avago Technologies,HEDR-55L2-BY09) with a resolution of 0.1 deg.
IV. EXPERIMENTAL EVALUATION
A. Transmission Stiffness
In a first experiment, we quantified the transmission stiff-ness of the system. We chose a transmission ratio of -1(s = [1 0 0 1 0 0]
T ) , blocked the input side (β ≡ 0),and gradually increased the load torque τα via weights anda pulley system on the output lever. The load was variedfrom -2.0 Nm to 2.0 Nm in increments of 0.2 Nm, and thedeflection of the output side α was measured (Fig. 4).A linear regression analysis evalutes the stiffness of thistransmission to be ∆τα/∆α = 124.2 Nm/rad.
B. Transmission Accuracy
In a second set of experiments, we manually movedthe input lever in an approximately sinusoidal fashion, andrecorded the joint-angle trajectories for both sides. By con-necting a subset of the cylinders to the common manifold and
Fig. 5. The input/output behavior of the experimental prototype wasrecorded using three different static transmission ratios of T = −1, T = 2,and T = 3.75. The output side was subject of a constant load of 2.03 Nmand the input was driven manually to approximate a sinusoid of 0.25 Hz(shown in (a)) and 1 Hz (shown in (b)) for the three transmission cases.The dotted red dotted lines show the theoretically expected transmissionvalues.
the remainder to the reservoir, we tested three different trans-mission ratios of T = −1
(s = [1 0 0 1 0 0]
T)
, T = +2(s = [1 0 1 0 1 0]
T)
, and T = −3.75(s = [1 0 1 1 0 0]
T)
.The input/output behavior of the transmission is shown in fig-ure 5 for slow (0.25 Hz) and fast (1 Hz) inputs. Experimentswere conducted against a constant load torque of 2.03 Nm.
When compared to a theoretically perfect transmission, inwhich α = T · β (dotted lines in Fig. 5), only a small errorcan be observed. The R2 values for the three cases are 0.998(T = −1), 0.997 (T = +2) and 0.996 (T = −3.75). Thehysteresis band of the system is also very small, particularlyfor small transmission ratios.
From these experiments, the maximal backlash valuesfor the three transmission ratios are 0.003 rad (T = −1),
5841

Fig. 6. A possible application for the proposed variable hydraulictransmission are body-powered exoskeletons. In this particular example,a hydraulic transmission spans the knee and ankle and allows to routepower from a healthy knee joint to an impaired ankle joint; for example,to prevent drop-foot after stroke. The two sets of cylinders are connectedselectively by a valve bank during a stride to realize an appropriatelychanging transmission ratio that creates a desired ankle motion.
0.006 rad (T = +2) and 0.007 rad (T = −3.75).
V. SIMULATION OF A KNEE-ANKLE EXOSKELETON
In preparation to running dynamical tests of the variabletransmission (which would require a motorization of theexperimental prototype and computer control of the valves,both of which are not implemented in the current prototype),we conducted a simulation study of the system to evaluatea potential control strategy and estimate dynamic behavior.To this end, we implemented a model of the experimentalprototype in MATLAB SimHydraulics (the Mathworks, Nat-ick, MA). This framework simulates the complete hydraulicflow, including valve switching. In the model, we used wateras hydraulic fluid. Flow viscosity was set to 0.48 cSt, andthe relative amount of trapped air to 0.005 %. The valvemaximum opening is 1.2mm. All cylinders were modeledas single acting cylinders with a piston area of 248 mm2.
As example, we chose a trajectory tracking task for the ex-ample application of a body-powered knee-ankle exoskeleton(Fig. 6). This system harvests power at the user’s healthyknee joint and routes it in a nonholonomic fashion to animpaired ankle joint; either on the same limb or on thecontra-lateral side. By continuously varying the hydraulictransmission ratio between knee and ankle, the system isable to track an arbitrary ankle trajectory; that is, as longas the knee joint is moving and providing power. Potentialapplications of such a system include the prevention ofdrop-foot in stroke patients. For the underlying hydraulictransmission system, we assumed a system that is equivalentto our experimental prototype. However, rather than usingsix single acting cylinders (three on each joint), an equivalentsystem could potentially be implemented using three doubleacting cylinders; for example, with two cylinders at the kneeand one cylinder at the ankle (as shown in Fig. 6).
We considered the knee motion of an average healthyperson to constitute the input trajectory β (t), and a healthyankle motion as the desired output trajectory α (t). Ascontroller, we propose a simple proportional controller with
Fig. 7. A simple P-controller with a velocity feed-forward component wasused to track a desired ankle angle α. A desired transmission ratio Tdesis obtained from the ratio of desired ankle joint velocity and knee jointvelocity. Valve settings s are selected from a look-up table to match Tdesas close as possible.
a feed-forward component, that computes a desired transmis-sion ratio Tdes (t) according to:
Tdes =˙α+ P (α− α)
β(11)
From a look-up table, a set of valve settings s that bestapproximates Tdes is selected at a frequency of 100 Hz (weassume the stride to last 1.2 s). A block diagram of controllerand plant is shown in figure 7. We chose the proportional gainP to be 10 1/s. The simulation of a complete stride cycle, thechoice of valve settings, and the resulting transmission ratiosare shown in figure 8.
Even with a fairly simple system with only three single-acting cylinders per joint, a close tracking of a desired motionis possible. On average, the motion created by the transmis-sion deviates only by 0.009 rad from the reference. Largertracking errors are only accumulated, when the velocity ofthe input (i.e., the knee joint) is close to zero. These caseswould require large (possibly infinite) transmission ratioswhich cannot be realized with any pure transmission system.In this particular example this happens around 16 %, 40 %,and 77 % of the stride cycle.
VI. DISCUSSION AND CONCLUSION
In this paper, we presented a novel variable transmissionthat is based on the concept of digital hydraulics. Thistransmission is implemented via a set of single-acting rollingdiaphragm cylinders that are connected via a valve bank toa common hydraulic manifold. The flow constraint in thismanifold creates a variable nonholonomic constraint betweeninput and output joints.
The experimental results from initial tests of the trans-mission prototype are highly encouraging. Due to the highstiffness of the hydraulic fluid, the system has a hightorque density, a good transmission accuracy, and very littlebacklash. The system is very stiff, has a good transmissionaccuracy, and exhibits very little backlash. Because of therolling diaphragm cylinders, the transmission also has a lowimpedance and very little friction. In combination, theseproperties mean that the transmission is very efficient, whichmakes it particularly suitable for embodied robots such asprosthetic applications or exoskeleton systems.
Even with a naive proportional controller that did not takeinto account the complexity of the nonholonomic control andplanning problem, precise trajectory tracking was realized.The fairly simple system with only six cylinders was capable
5842

Fig. 8. Shown is the simulation of a full walking stride of a body-poweredknee-ankle-exoskeleton (Fig. 6). The knee motion (shown as joint angle in(a)) constitutes the input β (t) to the system. By creating a time-varyingnonholonomic constraint via the proposed variable hydraulic transmission,this creates a driven ankle trajectory (shown in (b), black) which is trackinga normative, healthy motion (shown in (b), red). The selected valve settingss (shown in (c)) and transmission ratios T (shown in (d)) are altered at afrequency of 100 Hz.
of providing a close tracking of a complex desired motiontrajectory. For comparison, a hydraulic transmission witha fixed transmission ratio (as it presented in [11]) needsalready two cylinders per joint and is not much less complex.The largest deviations shown in figure 8 occured whenthe velocity of the input, β, was close to zero. In thesecases, the necessary transmission ratios become very large.This is a structural problem of any passive transmission, asthe required transmission ratio reaches infinity in the limitcase of zero input velocity. While in theory, the achievabletransmission ratio can easily be extended beyond the rangefrom -4.26 to 4.26, the scaling of the associated forces makessuch large transmission ratios not particularly applicable.For such cases, allowing the temporary storage of energy(for example, in an additional spring loaded cylinder) couldbecome a viable option.
The controller in the simulation currently uses an updaterate of 100 Hz, which is near the upper limit of switch-ing frequency of the valves used in the current hardware
configuration. Reducing the switching frequency can causeerror to accumulate in the system. Choosing an appropriatefeedback control that steers away position errors that mightaccumulate can potentially help overcome the need for such ahigh switching frequency and increase the limited resolutionwith respect to the transmission ratio.
In the presented prototype, the transmission consisted ofsix identical cylinders with identical lever arms on both theinput and output side. As a result, the system showed someredundancy in the achievable transmission ratios. That is,multiple valve configurations resulted in identical transmis-sion ratios. By optimizing the lever arms (or the choiceof cylinder cross section), the flow-rate Jacobian J can beoptimized to yield a more extended and/or smoother set oftransmission values. Such an optimization of J will be partof our future work, which also aims at the implementation ofdynamic control in actual hardware. This includes extensionsof the current prototype, and work in geometric control thatwould enable the realization of stable trajectory tracking witha more reasonable valve-switching frequency.
REFERENCES
[1] W. T. Townsend and J. K. Salisbury, “Mechanical design for whole-arm manipulation,” in Robots and Biological Systems: Towards a NewBionics?, pp. 153–164, Springer, 1993.
[2] I. W. Hunter, J. M. Hollerbach, and J. Ballantyne, “A comparativeanalysis of actuator technologies for robotics,” Robotics Review, vol. 2,1991.
[3] S. Seok, A. Wang, D. Otten, and S. Kim, “Actuator design for highforce proprioceptive control in fast legged locomotion,” in IntelligentRobots and Systems (IROS), 2012 IEEE/RSJ International Conferenceon, pp. 1970–1975, IEEE, 2012.
[4] W. K. Durfee and A. Rivard, “Design and simulation of a pneumatic,stored-energy, hybrid orthosis for gait restoration,” Journal of biome-chanical engineering, vol. 127, no. 6, pp. 1014–1019, 2005.
[5] R. B. Gillespie, J. L. Contreras-Vidal, P. A. Shewokis, M. K. O’Malley,J. D. Brown, H. Agashe, R. Gentili, and A. Davis, “Toward improvedsensorimotor integration and learning using upper-limb prostheticdevices,” in Engineering in Medicine and Biology Society (EMBC),2010 Annual International Conference of the IEEE, pp. 5077–5080,IEEE, 2010.
[6] D. N. Johnston, “A switched inertance device for efficient controlof pressure and flow,” in ASME 2009 Dynamic Systems and ControlConference, pp. 589–596, American Society of Mechanical Engineers,2009.
[7] J. Mattila and T. Virvalo, “Energy-efficient motion control of a hy-draulic manipulator,” in Robotics and Automation, 2000. Proceedings.ICRA’00. IEEE International Conference on, vol. 3, pp. 3000–3006,IEEE, 2000.
[8] M. Linjama, A. Laamanen, and M. Vilenius, “Is it time for digitalhydraulics?,” in In: Koskinen, KT & Vilenius, M.(eds.) The EightScandinavian International Conference on Fluid Power, Proceedingsof the Conference, May 7-9, 2003, Tampere, Finland, SICFP´ 03, 2003.
[9] M. Linjama, “Digital fluid power: State of the art,” in 12th Scandi-navian International Conference on Fluid Power, Tampere, Finland,May, pp. 18–20, 2011.
[10] M. LINJAMA and M. VILENIUS, “Energy-efficient motion controlof a digital hydraulic joint actuator,” in Proceedings of the JFPSInternational Symposium on Fluid Power, vol. 2005, pp. 640–645,, 2005.
[11] J. P. Whitney, M. F. Glisson, E. L. Brockmeyer, and J. K. Hodgins, “Alow-friction passive fluid transmission and fluid-tendon soft actuator,”in Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJInternational Conference on, pp. 2801–2808, IEEE, 2014.
5843