A new modal correction method for linear structures subjected to deterministic and random loadings
11
A new modal correction method for linear structures subjected to deterministic and random loadings Alessandro Palmeri ⇑ , Mariateresa Lombardo Department of Civil and Building Engineering, Loughborough University, Sir Frank Gibb Building, Loughborough LE11 3TU, United Kingdom article info Article history: Received 10 June 2010 Accepted 28 February 2011 Available online 8 April 2011 Keywords: Earthquake engineering Modal correction Modal acceleration method (MAM) Random vibration Sensitivity analysis Structural dynamics abstract In the general framework of linear structural dynamics, modal corrections methods allow improving the accuracy of the response evaluated with a reduced number of modes. Although very often neglected by researchers and practitioners, this correction is particularly important when strains and stresses are com- puted. Aimed at overcoming the main limitations of existing techniques, a novel dynamic modal accel- eration method (DyMAM) is presented and numerically validated. The proposed correction involves a set of additional dummy oscillators, one for each dynamic loading, and can be applied, with a modest computational effort, to discrete and continuous systems under deterministic and random inputs. Ó 2011 Elsevier Ltd. All rights reserved. 1. Introduction The vast majority of civil engineering structures exposed to dy- namic actions like wind gusts, ground shakings and moving loads are designed with the help of the modal analysis, in so reducing the size of the structural problem, and therefore the computational effort. This leads to the classical truncation procedure known to the literature as modal displacement method (MDM), in which a re- duced set of natural modes of vibrations is used to calculate the re- sponse of the system. The downside of this procedure is the unavoidable loss of accuracy associated with the truncation of high-frequency modes, whose contribution is not retained in the analysis. In the current state of practice, the truncation is generally accepted if the sum of the effective modal masses participating in the motion exceeds a given threshold, e.g. 90% of the total mass of the structure (as in the European seismic code [1]). Even though dependable by many researchers and practitioners, this criterion may fail in terms of strains and stresses, introducing large inaccu- racies in the design values for strength and fatigue checks. Hence, it clearly emerges the practical importance of methods able to cor- rect the modal response in such a way to achieve the required accuracy. This is generally done by adding to the MDM solution an approximate contribution somehow related to the higher modes. In the scientific literature, the most popular modal correction technique is the so-called mode acceleration method (MAM), in which the adjustment is simply given by the pseudo-static contri- bution of the higher modes of vibration [2,3]. This procedure has been also extended to cope with random loadings represented via Karhunen–Loève decomposition [4]. On the other hand, it should be noted that practical applications of modal correction methods are still modest as building codes do not enforce the use of such corrections when designing vibration-proof structures. Even though straightforward, the accuracy of the MAM reduces when the dynamic loadings have a significant high-frequency con- tent. Improved results can be obtained with the force derivative methods (FDM), whose correction is built as a series expansion [5,6]. This requires the knowledge of successive time derivatives of the excitation, which are not always available, therefore limiting the practical applicability of the method. A different approach underlies the dynamic correction method (DCM), in which the particular solutions of the differential equa- tions ruling the motion in both geometrical and modal space are used to define the corrective term [7]. Originally formulated for dy- namic loadings represented by analytical expressions, e.g. har- monic functions, this technique has been extended to cope with piecewise linear excitations, e.g. recorded accelerograms. The mathematical derivation of this improved DCM (IDCM) can be found in reference [8], where it is also shown that MAM and FDM can be viewed as particular cases of the DCM. In the attempt of mitigating the computational effort, a correc- tive term built in the reduced R nm modal space rather than in the full R n geometrical space has been proposed in reference [9]. 0045-7949/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.compstruc.2011.02.020 ⇑ Corresponding author. E-mail addresses: [email protected], [email protected] (A. Palmeri). Computers and Structures 89 (2011) 844–854 Contents lists available at ScienceDirect Computers and Structures journal homepage: www.elsevier.com/locate/compstruc
-
Upload
alessandro-palmeri -
Category
Documents
-
view
214 -
download
1
Transcript of A new modal correction method for linear structures subjected to deterministic and random loadings

Computers and Structures 89 (2011) 844–854
Contents lists available at ScienceDirect
Computers and Structures
journal homepage: www.elsevier .com/locate/compstruc
A new modal correction method for linear structures subjected to deterministicand random loadings
Alessandro Palmeri ⇑, Mariateresa LombardoDepartment of Civil and Building Engineering, Loughborough University, Sir Frank Gibb Building, Loughborough LE11 3TU, United Kingdom
a r t i c l e i n f o a b s t r a c t
Article history:Received 10 June 2010Accepted 28 February 2011Available online 8 April 2011
Keywords:Earthquake engineeringModal correctionModal acceleration method (MAM)Random vibrationSensitivity analysisStructural dynamics
0045-7949/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.compstruc.2011.02.020
⇑ Corresponding author.E-mail addresses: [email protected], dyn
(A. Palmeri).
In the general framework of linear structural dynamics, modal corrections methods allow improving theaccuracy of the response evaluated with a reduced number of modes. Although very often neglected byresearchers and practitioners, this correction is particularly important when strains and stresses are com-puted. Aimed at overcoming the main limitations of existing techniques, a novel dynamic modal accel-eration method (DyMAM) is presented and numerically validated. The proposed correction involves aset of additional dummy oscillators, one for each dynamic loading, and can be applied, with a modestcomputational effort, to discrete and continuous systems under deterministic and random inputs.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
The vast majority of civil engineering structures exposed to dy-namic actions like wind gusts, ground shakings and moving loadsare designed with the help of the modal analysis, in so reducingthe size of the structural problem, and therefore the computationaleffort. This leads to the classical truncation procedure known to theliterature as modal displacement method (MDM), in which a re-duced set of natural modes of vibrations is used to calculate the re-sponse of the system. The downside of this procedure is theunavoidable loss of accuracy associated with the truncation ofhigh-frequency modes, whose contribution is not retained in theanalysis. In the current state of practice, the truncation is generallyaccepted if the sum of the effective modal masses participating inthe motion exceeds a given threshold, e.g. 90% of the total mass ofthe structure (as in the European seismic code [1]). Even thoughdependable by many researchers and practitioners, this criterionmay fail in terms of strains and stresses, introducing large inaccu-racies in the design values for strength and fatigue checks. Hence, itclearly emerges the practical importance of methods able to cor-rect the modal response in such a way to achieve the requiredaccuracy. This is generally done by adding to the MDM solutionan approximate contribution somehow related to the highermodes.
ll rights reserved.
In the scientific literature, the most popular modal correctiontechnique is the so-called mode acceleration method (MAM), inwhich the adjustment is simply given by the pseudo-static contri-bution of the higher modes of vibration [2,3]. This procedure hasbeen also extended to cope with random loadings representedvia Karhunen–Loève decomposition [4]. On the other hand, itshould be noted that practical applications of modal correctionmethods are still modest as building codes do not enforce theuse of such corrections when designing vibration-proof structures.
Even though straightforward, the accuracy of the MAM reduceswhen the dynamic loadings have a significant high-frequency con-tent. Improved results can be obtained with the force derivativemethods (FDM), whose correction is built as a series expansion[5,6]. This requires the knowledge of successive time derivativesof the excitation, which are not always available, therefore limitingthe practical applicability of the method.
A different approach underlies the dynamic correction method(DCM), in which the particular solutions of the differential equa-tions ruling the motion in both geometrical and modal space areused to define the corrective term [7]. Originally formulated for dy-namic loadings represented by analytical expressions, e.g. har-monic functions, this technique has been extended to cope withpiecewise linear excitations, e.g. recorded accelerograms. Themathematical derivation of this improved DCM (IDCM) can befound in reference [8], where it is also shown that MAM andFDM can be viewed as particular cases of the DCM.
In the attempt of mitigating the computational effort, a correc-tive term built in the reduced Rn�m modal space rather than in thefull Rn geometrical space has been proposed in reference [9].

A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854 845
Unfortunately, since the number of modes retained in the analysis,m, is generally much less than the number of degrees of freedom(DoFs), n, the practical impact of this improvement tends to vanishfor very large structural systems. Di Paola and Failla [9] also pro-vides a rigorous criterion for the convergence of modal correction,that is: the highest natural frequency of the retained modes ofvibration, exm, must be larger than the maximum frequency ofthe input. Indeed, if the opposite happens, the resonant contribu-tions of some of the higher modes may become important, if notpredominant, and so these modes should be retained in the dy-namic analysis.
Strategies of modal corrections specifically tailored to continu-ous structures, e.g. slender Euler–Bernoulli beams under fixed andmoving loads, have been also proposed in a handful of articles [10–14] by extending the methods discussed above for discrete struc-tures, and thus they enjoy the same advantages and suffers fromthe same disadvantages.
The availability of effective modal correction techniques is evenmore important in presence of random dynamic loadings. Indeed,methods to evaluate the response statistics in the probabilisticframework can be very time consuming for large systems, and henceany strategy capable to reduce the size of the problem withoutcompromising the accuracy are very valuable. Nonetheless, littleattention has been paid over the years to this topic. Direct exten-sions of FDM [15] and IDCM [16] for structures subjected to randomexcitations are available in the literature, but their applicability inpractical situations is limited, since they require either a finite valuefor the variance of the dynamic input or an excessive computationaleffort, respectively. More recently, a proper stochastic MAM(SMAM) correction has been proposed by Cacciola et al. [17], whichoperates directly onto the differential equations governing first- andsecond-order statistics of the structural response. Although veryinteresting from a theoretical point of view, the SMAM correctionneeds the inversion of a matrix of size (2n)2, n being the numberof structural DoFs. The authors suggest (2n)2 recursive applicationsof the Sherman-Morrison formula [18], to mitigate the computa-tional effort, which may be time-consuming for very large structuralsystems. Moreover, the extension of the SMAM to continuousstructures does not appear to be straightforward.
Aimed at overcoming these limitations, a novel modal correc-tion method is proposed in this paper. The new technique, termeddynamic MAM (DyMAM), is initially formulated under the assump-tion that loads are deterministic. It is shown that the DyMAM cor-rective terms involve a number of additional dummy oscillatorsequal to the number of dynamic loads, which is generally muchless than the number of the DoFs of the structure. This makesthe procedure particularly appealing from a computational pointof view. It is also shown that, similar to the classical MAM, the pro-posed DyMAM works for both discrete and continuous structuralsystems. In a second stage, the proposed approach is extended tocope with random dynamic loads, therefore demonstrating theversatility of the proposed strategy of modal correction. Numericalexamples prove accuracy and computational efficiency of DyMAMcorrections in both deterministic and random settings.
k¼1
2. Modal acceleration method (MAM)
Let us consider a discrete structure with n DoFs (degrees of free-dom) subjected to ‘ dynamic loadings. Within the linear range, theequations of motion can be posed in the form:
M � €uðtÞ þ C � _uðtÞ þ K � uðtÞ ¼ F �wðtÞ; ð1Þ
where u(t) = {u1(t)� � �un(t)}T and w(t) = {w1(t) � � � w‘(t)}T are thearrays listing DoFs of the structure and dynamic loadings, the super-script T being the transpose operator; M, C and K are the
n-dimensional matrices of mass, viscous damping and elastic stiff-ness; the over-dot denotes the time derivative; and whereF = [f1 � � � f‘] is the n � ‘ tall matrix collecting the n-dimensionalinfluence vectors for the ‘ dynamic loadings. In earthquake engi-neering, ‘ is the number of components of the ground acceleration,while in wind engineering ‘ may be the number of statistically inde-pendent components of the field of wind velocity.
In order to reduce the size of the problem in presence of largestructural systems, the equations of motion are usually projectedonto the modal space, which in turn is defined by the real-valuedeigenproblem:
~x2j M � e/j ¼ K � ~/j; ð2Þ
with the ortho-normalisation condition e/Ti �M � ~/j ¼ di;j, the symbol
di,j being the Kronecker’s delta, equal to 1 when i = j, 0 otherwise.In most civil engineering applications, the number m of vibra-
tional modes retained in the analysis is much less than n. In earth-quake engineering, for instance, building codes simply require thatthe modal mass participating in the seismic motion of the structureexceeds a given threshold, e.g. 90% as in the Eurocode 8 [1]. For anangle of attach a of the ground shaking, this condition can be ex-pressed in the form:Xm
j¼1
p2j ðaÞP 0:90Mtot; ð3Þ
where Mtot is the total mass of the structure, while p2j ðaÞ is the coef-
ficient of modal participation for the jth mode, given by:
pjðaÞ ¼ e/Tj � fk; ð4Þ
in which fk is the influence vector for the ground acceleration wk(t)along a generic angle of attack a.
If the structure is classically damped, i.e. if the well knownCaughey–O’Kelly condition is met [19], the equations of motionturn out to be decoupled in the modal space:
€qjðtÞ þ 2~fj ~xj _qjðtÞ þ ~x2j qjðtÞ ¼ ~/T
j �X‘k¼1
fkwkðtÞ; ð5Þ
where ~fj is the viscous damping ratio in the jth mode of vibration.Once the modal equations of motion are solved, the dynamic re-
sponse in terms of structural DoFs can be obtained by projectingback the modal responses onto the geometrical space of thesystem:
~uðtÞ ¼Xm
j¼1
~/jqjðtÞ ¼ uMDMðtÞ; ð6Þ
where the over-tilde means that the structural responses so com-puted are approximate because the higher (n �m) modes of vibra-tion are neglected, while the subscript MDM stands for the classicalmodal displacement method.
Even though accurate in terms of absolute displacements of thestructure, the effects of the modal truncation in the MDM can bequite large on relative displacements and internal forces. Indeed,once the higher modes are truncated, the dynamic system appearsin the analyses fictiously more stiff, which may result in signifi-cantly under- or over- estimating the actual dynamic response.
In order to include in the analysis the additional flexibility aris-ing from the neglected modes of vibration, the MAM (modal accel-eration method) has been proposed [2,3]. The correction formulacan be expressed as:
uMAMðtÞ ¼ ~uðtÞ þ DuMAMðtÞ; ð7Þ
where:
DuMAMðtÞ ¼ A �X‘
fkwkðtÞ; ð8Þ

846 A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854
in which the reduced flexibility matrix of the structure is given by:
A ¼ K�1 �Xm
j¼1
1~x2
j
~/j � e/Tj : ð9Þ
It can be proved that MAM correction is equivalent to the fol-lowing static correction (see [20]):
DuMAMðtÞ � K�1 � RðtÞ �M �Xm
j¼1
~/jrjðtÞ( )
; ð10Þ
where rj(t) is the jth modal excitation:
RðtÞ ¼ F �wðtÞ ¼M �Xn
j¼1
~/jrjðtÞ: ð11Þ
The MAM is able to correct the dynamic response in the low-frequency range, but introduces at the same time an error in thehigh-frequency range. This can be easily shown by consideringthe Fourier’s transform of both sides of Eq. (7):
FThuMAMðtÞi ¼ FTh~uðtÞi þ FThDuMAMðtÞi
¼ HMAMðxÞ �X‘k¼1
fkFThwkðtÞi; ð12Þ
where FTh � i stands for the Fourier’s transform operator, whileHMAM(x) is the n � n matrix collecting the complex-valued FRFs(frequency response functions) obtained with m modes of vibrationand MAM correction:
HMAMðxÞ ¼Xm
j¼1
~/j � e/TjeHjðxÞ þ A; ð13Þ
eHjðxÞ being the FRF for the jth mode of vibration:
eHjðxÞ ¼1
~x2j �x2 þ 2i~fj ~xjx
; ð14Þ
in which i ¼ffiffiffiffiffiffiffi�1p
is the imaginary unit.The approximate FRF matrix HMAM(x) converges to the exact
one H(x) when the frequency of vibration goes to zero. That is:
HðxÞ ¼ K�x2Mþ ixC� ��1
; ð15Þ
which at x = 0 reduces to:
Hð0Þ ¼ K�1 ¼ HMAMð0Þ: ð16Þ
On the contrary, when x goes to infinity the approximate FRFmatrix of the MAM converges to the reduced flexibility matrix A,while the exact one approaches a null matrix:
limx!1
HðxÞ ¼ On�n– limx!1
HMAMðxÞ ¼ A; ð17Þ
in which Or�s is a zero matrix with r rows and s columns. Since A isthe correction term in the right-hand side of Eq. (13), it follows thatthe more the MAM improves the solution at low frequencies, thelarger is the inaccuracy introduced at high frequencies.
3. Dynamic MAM (DyMAM)
In the previous section, it has been shown that the classicalMAM is unable to correct the dynamic response in the low-frequency range without introducing a systematic error in thehigh-frequency range. Aim of this section is to formulate a novelcorrection strategy which keeps the improvement of the MAMfor low frequencies without affecting high frequencies. It is antici-pated that the proposed modal correction method enjoys improvedperformances at low frequencies too. This goal can be achieved bymodifying the dynamic loading in the right-hand side of Eq. (8):
DuDyMAMðtÞ ¼ A �X‘k¼1
fkhkðtÞ; ð18Þ
in which the subscript DyMAM stands for dynamic MAM, since hk(t)is the kth dynamic loading wk(t) properly filtered through an ele-mentary dynamic system, namely a single-DoF oscillator with un-damped circular frequency of vibration x̂k and viscous dampingratio f̂k. That is, the novel variable hk(t) is ruled by a second-orderlinear differential equation formally similar to the equation of mo-tion of a single-DoF oscillator forced by the dynamic loading wk(t):
€hkðtÞ þ 2�fk �xk_hkðtÞ þ �x2
khkðtÞ ¼ �x2kwkðtÞ: ð19Þ
The reason for filtering the dynamic input wk(t) is to avoid undesir-able high-frequency contributions arising from the modal correc-tion term. Amongst possible filters for the dynamic excitationwk(t), a single-DoF has been chosen herein because it allows han-dling the corrective output hk(t) similar to the jth modal responseqj(t), e.g. standard strategies of structural dynamics can be applied.As a side advantage, practitioner structural engineers do not requirefurther knowledge to understand the effects of such filtering. Thischoice enables also a physical justification of the DyMAM correc-tion. The idea is indeed to attach the flexibility of higher modes ofvibration to the corresponding residual inertia, therefore having asingle-DoF equipped with stiffness and mass which are not takeninto account with the first m modes in the MDM. Accordingly, thecircular frequency �xk of the filter associated with the kth dynamicload can be evaluated by resorting to the concept of Rayleigh’s quo-tient [21], which for a discrete structural system takes the form:
�xk ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiuT
k � K�M � eU � eX2 � eUT �Mh i
� �uk
�uTk � M�M � eU � eUT �Mh i
� �uk
vuuut ; ð20Þ
where �uk ¼ K�1 � fk represents the deformed shape under the kthinfluence vector fk; eX is the m-dimensional spectral matrix of thestructure, listing the first m undamped circular frequencies:eX ¼ diag ~x1 � � � ~xm½ �; ð21Þ
the diag[�] operator returning a diagonal matrix from the elementswithin square brackets, while the matrices at numerator anddenominator in Eq. (20) are the residual matrices of stiffness andmass, respectively, which in turn are obtained by removing fromK and M the contributions of the first m modes of vibration.
After simple algebra, Eq. (20) can be posed in the alternativeform:
�xk ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�uT
k � K � �uk � �qTk � eX2 � �qk
�uTk �M � �uk � �qT
k � �qk
s; ð22Þ
where �qk ¼ eUT �M � uk is the projection of �uk onto the reduced mod-al space, being:eU ¼ ½e/1 � � � e/m� ð23Þ
the n �m tall matrix collecting the first m modal shapes of thestructure.
Numerator and denominator in Eq. (22) are respectively pro-portional to residual potential energy and residual kinetic energyof the structure vibrating with the deformed shape �uk once thecontributions of the first m modes, vibrating according to the array�qk, have been removed.
The value of the viscous damping ratio �fk for the kth filter can beevaluated by using the Rayleigh’s model of viscous damping [21]:
�fk ¼1
2 �xk� aM þ
�xk
2a�1
K ; ð24Þ
where the coefficients aM and aK, with the same dimensions as acircular frequency, are given by:

A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854 847
aM ¼2
~x2m � ~x2
1
~x1 ~xm ~xm~f1 � ~x1
~fm
� �; ð25aÞ
aK ¼~x2
m � ~x21
21
~xm~fm � ~x1
~f1; ð25bÞ
while the viscous damping matrix of the whole structure can be ex-pressed as:
C ¼M � eU � eN � eUT �Mþ aM M�M � eU � eUT �Mh i
þ aK K�M � eU �X2 � eUT �Mh i
; ð26Þ
in which eN is the m-dimensional matrix of modal damping:
eN ¼ 2diag ~f1 � � �~fm
h i� eX: ð27Þ
Eq. (26) shows that, according to the DyMAM correction ap-proach, the viscous damping matrix can be consistently built assuperposition of three contributions, namely: (i) viscous dampingdue to the m modes of vibration retained in the analysis; (ii) dissi-pation term proportional to the residual mass; (iii) dissipationterm proportional to the residual stiffness. The matrix C so ob-tained will be used in the numerical applications for validationpurposes.
Once circular frequencies and viscous damping ratios of theauxiliary dummy oscillators have been defined, the equations rul-ing the DyMAM take the matrix form:
€qðtÞ þ eN � _qðtÞ þ eX2 � qðtÞ ¼ eUT � F �wðtÞ; ð28aÞ€hðtÞ þ N � _hðtÞ þX2 � hðtÞ ¼ X2 �wðtÞ; ð28bÞ
where the arrays q(t) = {q1(t) � � � qm(t)}T and h(t) = {h1(t) � � � h‘(t)}T
collect m modal coordinates and ‘ filtered loadings, respectively,while X and N are spectral and damping matrices for the novel ar-ray h(t):
X ¼ diag �x1 � � � �x‘½ �; ð29aÞN ¼ 2diag �f1 � � ��f‘
� ��X: ð29bÞ
Eqs. (28a) and (28b) can be solved independently, and their re-sponses can be superimposed in order to get the corrected timehistories of the structural DoFs:
uDyMAMðtÞ ¼ ~uðtÞ þ DuDyMAMðtÞ ¼ eU � qðtÞ þ A � F � hðtÞ: ð30Þ
By taking the Fourier’s transform of Eq. (30), after some algebra,one obtains the approximate FRF matrix consistent with theDyMAM correction:
FThuDyMAMðtÞi ¼ eU � FThqðtÞi þ A � F � FThhðtÞi¼ HDyMAMðxÞ � F � FThwðtÞi; ð31Þ
where
HDyMAMðxÞ ¼ eU � eHðxÞ �UT þ A � F �HðxÞ; ð32Þ
in which eHðxÞ and HðxÞ are the matrices collecting the FRFs for thefirst m modes of vibration and the ‘ dummy oscillators,respectively:
eHðxÞ ¼ diag eH1ðxÞ � � � eHmðxÞh i
; ð33aÞ
HðxÞ ¼ diag H1ðxÞ � � �H‘ðxÞ� �
; ð33bÞ
whose kth elements are given by Eq. (14) for the former matrix andby:
HkðxÞ ¼x2
k
�x2k �x2 þ 2i�fkxk
ð34Þ
for the latter matrix, respectively.
Importantly, both the limiting conditions at x = 0 and when xgoes to infinity are satisfied by the novel FRF matrix:
HDyMAMð0Þ ¼ K�1; limx!þ1
HDyMAMðxÞ ¼ On�n: ð35Þ
3.1. Continuous structure
The proposed DyMAM correction lends itself to be extended tocope with continuous structures under dynamic loadings. Withoutlack of generality, let us consider a slender beam of length L sub-jected to ‘ time-varying concentrated forces. The problem in handis ruled by the partial differential equation:
lðzÞ @2
@t2 uðz; tÞ þ @2
@z2 jðzÞ @2
@z2 uðz; tÞ !
þ Dðz; tÞ
¼X‘k¼1
dðz� �zkÞwkðtÞ; ð36Þ
where l(z) and j(z) are mass per unit length and flexural stiffnessof the beam; u(z, t) is the time-dependent field of transverse dis-placements, while D(z, t) is the damping force per unit length, whichcan be assumed to be of viscous nature; the pair f�zk;wkðtÞg definesposition and intensity of the kth load, while d(�) is the Dirac’s deltafunction, which in turn is defined as the derivative of the Heavi-side’s unit step function U (�):
dðzÞ ¼ ddz
UðzÞ; UðzÞ ¼0; z < 0;12 ; z ¼ 0;1; z > 0:
8><>: ð37Þ
An approximate solution of Eq. (36) can be derived by applyingthe classical modal analysis. Accordingly, the field of transversedisplacements is expressed as superposition of the first m modalshapes of the beam (analogous to Eq. (6)):
~uðz; tÞ ¼Xm
j¼1
~/jðzÞqjðtÞ ¼ uMDMðz; tÞ; ð38Þ
where qj(t) is the jth modal coordinate and ~/jðzÞ is the associatedmodal shape, to be evaluated along with the jth modal circular fre-quency ~xj as solution of the eigenproblem (corresponding to Eq.(2)):
~x2j lðzÞ~/jðzÞ ¼
d2
dz2 jðzÞ d2
dz2~/jðzÞ
!; ð39Þ
coupled with ortho-normalisation condition:Z L
0lðzÞ~/iðzÞ~/jðzÞdz ¼ di;j; ð40Þ
and pertinent boundary conditions.Substituting Eq. (38) into Eq. (36), pre-multiplying both sides by
~/jðzÞ, and integrating from 0 to L with respect to z, one obtains(analogous to Eq. (5)):
€qjðtÞ þ 2~fj ~xj _qðtÞ þ ~x2j qjðtÞ ¼
X‘k¼1
~/jð�zkÞwkðtÞ: ð41Þ
The DyMAM correction of the beam’s dynamic response can be ex-pressed as (similar to Eq. (30)):
uDyMAMðz; tÞ ¼ ~uðz; tÞ þ DuDyMAMðz; tÞ ¼ ~/TðzÞ � qðtÞ þ �gTðzÞ � hðtÞ;ð42Þ
where ~/ðzÞ ¼ f~/1ðzÞ � � � ~/mðzÞgT and q(t) = {q1(t) � � � qm(t)}T are them-dimensional arrays listing modal shapes and modal coordinatesof the beam; h(t) = {h1(t) � � � h‘(t)}T is the array of ‘ filtered dynamic

848 A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854
loadings, which are distinctive of the proposed approach, while�gðzÞ ¼ fGðz;�z1Þ � � �Gðz;�z‘ÞgT is the time-dependent array collectingthe reduced Green’s function of the beam evaluated at the positionof the ‘ dynamic loadings. It is worth emphasizing that the reducedGreen’s function Gðz; zÞ for a continuous structure plays the samerole as the reduced flexibility matrix A for a discrete structure. In-deed, the definition of the function Gðz;�zÞ is similar to that one ofthe matrix A (see Eq. (9)):
Gðz;�zÞ ¼ Gðz;�zÞ �Xm
j¼1
1x2
j
~/jðzÞ~/jð�zÞ; ð43Þ
in which Gðz;�zÞ is the actual Green’s function of the beam, satisfyingthe static bending equation:
d2
dz2 jðzÞ d2
dz2 Gðz;�zÞ !
¼ dðz� �zÞ; ð44Þ
with the appropriate boundary conditions.Also the evolution in time of arrays q(t) and h(t) appearing in Eq.
(42) for continuous structures is ruled similar to the analogous ar-rays for discrete structures (see Eqs. (28)):
€qðtÞ þ eN � _qðtÞ þ eX2 � qðtÞ ¼ eF �wðtÞ; ð45aÞ€hðtÞ þ N � _hðtÞ þX2 � hðtÞ ¼ X2 �wðtÞ; ð45bÞ
where the rectangular matrix eF collects the modal forcing coeffi-cients of Eq. (41):
eF ¼~/1ð�z1Þ � � � ~/1ð�z‘Þ
..
. . .. ..
.
~/mð�z1Þ � � � ~/mð�z‘Þ
26643775; ð46Þ
while the other matrices take the very same expressions as for dis-crete structures (see Eqs. (21), (27) and (29):
eX ¼ diag ex1 � � � exm� �
; eN ¼ 2 diag ef1 � � �efm
h i� eX; ð47aÞ
X ¼ diag �x1 � � � �x‘½ �; N ¼ 2 diag �f1 � � ��f‘� �
�X: ð47bÞ
The kth circular frequency appearing in the first of equations (47b)can be evaluated by rewriting Eq. (22) for continuous rather thandiscrete structures:
�xk ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiR L0 jðzÞ d2
dz2 Gðz;�zkÞh i2
dz� �qTk � eX2 � �qkR L
0 lðzÞGðz;�zkÞ2dz� �qTk � �qk
vuuut ; ð48Þ
where the array �qk describes in the m-dimensional modal space thedeformed shape of the slender beam under investigation induced bya unit point load at z ¼ �zk:
�qk ¼Z L
0lðzÞ/ðzÞGðz;�zkÞdz: ð49Þ
The kth viscous damping ratio in the second of equations (47b)can be determined through Eqs. (24) and (25), which are valid forboth discrete and continuous systems.
4. Numerical solution for deterministic DyMAM correction
In the previous section, the differential equations ruling the dy-namic response of discrete (Eqs. (28)) and continuous (Eqs. (47))structures with the proposed DyMAM correction have been de-rived. Aim of this section is to present integral and incrementalsolutions for these equations.
To do so, let us introduce the array of traditional state variablesfor the structural system in the modal space,collecting modal displacements and modal velocities, along with
the novel array, , listing the state variables associ-ated with the filtered dynamic loadings.
The evolution in time of the state arrays x(t) and y(t) is ruled by:
_xðtÞ ¼ eD � xðtÞ þ eV �wðtÞ; ð50aÞ_yðtÞ ¼ D � yðtÞ þ V �wðtÞ; ð50bÞ
where:
ð51Þ
Is being the identity matrix of size s, while the rectangular matrix eVtakes different expressions for discrete structures (see Eq. (28a)):
ð52aÞ
and continuous ones (see Eq. (45a)):
ð52bÞ
The following time-domain single-step incremental solutionscan be used in practice:
xðt þ DtÞ ¼ eHðDtÞ � xðtÞ þ eC0ðDtÞ � eV �wðtÞ þ eC00ðDtÞ � eV �wðt þ DtÞ;ð53aÞ
yðt þ DtÞ ¼ HðDtÞ � yðtÞ þ C0ðDtÞ � V �wðtÞ þ C00ðDtÞ � V �wðt þ DtÞ;ð53bÞ
where Dt is the time step selected for the incremental solution,while the operators H and C in the right-hand side of Eqs. (56)are given in Appendix A.
Once the state arrays x(t) and y(t) have been evaluated, and thesub-arrays q(t) and h(t) extracted, the structural response can becomputed through Eq. (30) for a discrete system and Eq. (42) fora continuous one.
5. DyMAM correction with random loadings
In many engineering situations, dynamic loadings are notknown in a deterministic sense, being properly described by ran-dom processes of given statistics. This is the case, for instance, ofnatural actions like ground shakings, wind gusts and ocean waves.
When the excitation is a random process, the dynamic responseis random too, and hence the statistics of the response must beevaluated. For illustrative purpose, let us consider a discrete struc-tural system subjected to one-dimensional (‘ = 1) seismic motion.Extension to multi-variate random excitations and/or continuousstructures is straightforward. The mathematical derivation of thegoverning equations is offered herein for the simplest case ofone-variate input and discrete structure to avoid heavier notations.For the problem in hand, Eq. (1) particularises as:
M � €uðtÞ þ C � _uðtÞ þ K � uðtÞ ¼ fwðtÞ; ð54Þ
where w(t) is the ground acceleration, which is modeled as a zero-mean Gaussian process, fully characterized by the auto-correlationfunction:
Rwwðt; sÞ ¼ EhwðtÞwðsÞi; ð55Þ
where the symbol Eh � i denotes the expectation operator.Owing for the linearity of the structural system, one can easily
prove that the dynamic response u(t) is a zero-mean Gaussian pro-cess, which in turn is fully characterized in a probabilistic sense bythe n2-dimensional array collecting auto- and cross-correlationfunctions:

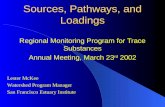
Fig. 1. Sketch of the planar truss used for validation purposes; high-frequencycontributions are particularly important for the emphasised bars (17) and (21).
A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854 849
ruuðt; sÞ ¼ EhuðtÞ � uðsÞi; ð56Þ
where � means Kronecker’s product (see Appendix B).In many practical situations, however, engineering conclusions
about serviceability and ultimate limit states can be drawn justconsidering variances and covariances of displacements and veloc-ities of the system:
ruðtÞ ¼ EhuðtÞ½2�i; ð57aÞr _uðtÞ ¼ Eh _uðtÞ½2�i; ð57bÞ
where the superscript [2] means Kronecker’s square (see AppendixB).
By taking into account Eq. (30), the DyMAM correction leads tothe following expressions for the variance–covariance arrays of thestructural response in terms of displacements and velocities:
ru;DyMAMðtÞ ¼ eU ½2� � EhqðtÞ½2�i þ A � fn o½2�
EhhðtÞ2i
þ eU � A � fn o
þ A � fn o
� eUh i� EhqðtÞhðtÞi; ð58aÞ
r _u;DyMAMðtÞ ¼ eU ½2� � Eh _qðtÞ½2�i þ A � fn o½2�
Eh _hðtÞ2i
þ eU � A � fn o
þ A � fn o
� eUh i� Eh _qðtÞ _hðtÞi; ð58bÞ
in which the properties of the Kronecker’s algebra have been re-sorted to.
The statistics appearing in the right-hand side of Eqs. (61) canbe extracted from the variance–covariance arrays of traditionaland additional state variables:
EhxðtÞ½2�i ¼Ehq1ðtÞ
2i...
Eh _qmðtÞ2i
8>><>>:9>>=>>;; ð59aÞ
EhyðtÞ½2�i ¼EhhðtÞ2i
..
.
Eh _hðtÞ2i
8>><>>:9>>=>>;; ð59bÞ
EhxðtÞ � yðtÞi ¼
Ehq1ðtÞhðtÞi...
Eh _qmðtÞ _hðtÞi
8>><>>:9>>=>>;; ð59cÞ
whose evolution in time is ruled by three decoupled sets of first-or-der linear differential equations:
ddt
EhxðtÞ½2�i ¼ Eh _xðtÞ � xðtÞ þ xðtÞ � _xðtÞi
¼ eD � I2m þ I2m � eDh i� EhxðtÞ½2�i
þ eV � I2m þ I2m � eVh i� EhxðtÞwðtÞi; ð60aÞ
ddt
EhyðtÞ½2�i ¼ Eh _yðtÞ � yðtÞ þ yðtÞ � _yðtÞi
¼ D� I2‘ þ I2‘ � D� �
� EhyðtÞ½2�iþ V � I2‘ þ I2‘ � V� �
� EhyðtÞwðtÞi; ð60bÞ
ddt
EhxðtÞ � yðtÞi ¼ Eh _xðtÞ � yðtÞ þ xðtÞ � _yðtÞi
¼ eD � I2‘ þ I2m � Dh i
� EhxðtÞ � yðtÞi
þ eV � I2‘
h i� EhxðtÞwðtÞi þ I2m � V
� �� EhyðtÞwðtÞi: ð60cÞ
It can be proved that forcing terms in the right-hand side of Eq.(55) are given by the integral expressions:
EhxðtÞwðtÞi ¼Z t
0
eHðt � sÞ � eVRwwðt; sÞds; ð61aÞ
EhyðtÞwðtÞi ¼Z t
0Hðt � sÞ � VRwwðt; sÞds: ð61bÞ
The three steps listed below are then required:
1. Evaluation of the forcing term through Eqs. (64);2. Numerical integration of Eqs. (63), which give the evolution in
time of the second-order statistics of modal (classical) and load-ing (additional) state variables;
3. Extraction of the reduced variances and covariances in theright-hand side of Eqs. (62), and projection of these statisticsonto the actual geometrical space of the structure via Eqs. (61).
The numerical solution of Eqs. (63) can be obtained, similar tothose of Eqs. (52), through the following incremental schemes:
Ehxðt þ DtÞ½2�i ¼ eH2ðDtÞ � EhxðtÞ½2�i þ eW2ðDtÞ� EhxðtÞwðtÞi þ Ehxðt þ DtÞwðt þ DtÞif g; ð62aÞ
Ehyðt þ DtÞ½2�i ¼ H2ðDtÞ � EhyðtÞ½2�i þW2ðDtÞ� EhyðtÞwðtÞi þ Ehyðt þ DtÞwðt þ DtÞif g; ð62bÞ
Ehxðt þ DtÞ � yðt þ DtÞi ¼ bH2ðDtÞ � EhxðtÞ � yðtÞi bW 02ðDtÞ� EhxðtÞwðtÞ þ xðt þ DtÞwðt þ DtÞiþ bW 002ðDtÞ � EhyðtÞwðtÞþ yðt þ DtÞwðt þ DtÞi: ð62cÞ
Transition matrices H2 and loading matrices W2 for the second-order statistics are offered in Appendix C.
6. Numerical applications
For the sake of numerical validation, the performances of theproposed DyMAM correction have been tested with the seismicanalysis of the 1-bay 10-storey planar pin-jointed truss depictedin Fig. 1. The structure possesses n = 40 DoFs (degrees of freedom),

850 A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854
i.e. horizontal and vertical translations of the 20 free joints in ele-vation. Movements of joints at the same level are not constrainedby any deck system (e.g. rigid slab) in parallel with the horizontalbar. For the generic ith bar of length Li, additional lumped massesMi = qALi have been superimposed at each end to the consistentinertia of the element, so that the total mass of the structure isMtot = 1,554 kg. Geometrical and mechanical data of the structureare given in Table 1, while Table 2 lists circular frequencies andmass participation ratios of the first six modes of vibration. Thisobjective structure has been chosen because its simplicity may en-able one to easily reproduce the results and appreciate the im-proved accuracy of the proposed strategy of modal correction. Itis worth noting here that, analogously to MAM, the larger is thenumber n of DoFs of the structure under consideration, the more
Table 1Truss’ geometrical and mechanical data.
Bay’s width B = 600 cmInterstorey’s height H = 450 cmBars’ mass per unit length qA = 2.4 kg/mBars’ axial stiffness E A = 60,000 KNModal viscous damping ratio f = 0.05
Table 2Truss’ modal data.
Mode’s number Circular frequency [rad/s] Cumulative massparticipation factor [%]
1 8.7 66.02 41.8 88.43 62.7 88.44 92.4 94.95 142.7 97.66 182.3 97.7
Fig. 2. Frequency response function (top) for the seismic-induced axial strain in bars (17
efficient tends to be the DyMAM. Indeed, the number of highermodes of vibration to be retained in the analysis in order to achievethe desired accuracy tends to increase with the number n of DoFs,while the number of dummy oscillators required by the proposedDyMAM correction increases with the number ‘ of dynamicexcitations.
In a first stage, the FRF have been computed for the axial strainof bars (17) and (21), identified with ticker lines in Fig. 1. Thesebars have been selected after a sensitivity analysis, showing thatthe contribution of higher modes of vibration is particularly impor-tant for these two members. It must be emphasised that the outputparameters considered in this example, i.e. axial strains in bars (17)and (21), will be used to demonstrate the improved accuracygained with the proposed approach with an easily reproduciblemodel, rather than exemplifying a realistic design situation (in-deed, today’s computer power would allow running the time-domain dynamic analysis of the truss depicted in Fig. 1 withoutany modal truncation). Log–log graphs at the top of Fig. 2 comparesthe exact FRFs (thick solid lines), computed by retaining all them = n = 40 modes of vibration (and resorting to the damping matrixof Eq. (26)), with those obtained by modal displacement method(MDM, circles), modal acceleration method (MAM, dot-dashedlined) and proposed dynamic MAM correction (DyMAM, dottedlines) when just the first m = 4 modes are retained. Interestingly,the modal mass participating in the motion of the structure withm = 4 sums up to 94.9% of the total mass (see Table 2), i.e. it ex-ceeds the threshold of 90%, which is typically assumed by seismiccodes for accepting the truncation. Nevertheless, the inaccuracy ofthe MDM in the low frequency range is very large. Specifically, atx = 0 the MDM overestimates the strain in the element e = 17 by35.1%, while the strain in the element e = 21 is underestimatedby 78.3%. In both cases, the classical MAM correction is able to re-duce the inaccuracy in pseudo-static conditions below 0.1%, whilethe proposed DyMAM further improves the results, with a pseudo-static inaccuracy of the order of 0.0001%. The latter correction is
) and (21), and percentage inaccuracies of the modal correction methods (bottom).

Fig. 3. Exact time histories of strain and strain rate (top) and corresponding discrepancies in the phase plane for different modal correction methods (bottom) when just m = 4modes of vibration are retained.
A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854 851
associated with the dynamic response of an additional dummyoscillator having undamped circular frequency �x ¼ 154:1 rad=sand viscous damping ratio �f ¼ 0:0788 (as computed by Eqs. (22)and (24), respectively).
The absolute value of the percentage inaccuracy jej against thefrequency of vibration xis plotted in the log–log graphs at the bot-tom of Fig. 2. Inspection of these graphs clearly shows that the pro-posed DyMAM correction performs consistently better than theclassical MAM correction. It is particularly important the improvedaccuracy in the low-frequency range, i.e. x < 100 rad/s, wheremost of the energy of dynamic loadings for civil engineering appli-cations is usually concentrated. Interestingly, a small peak appearsin the percentage inaccuracy of the DyMAM correction for elemente = 21 at x ffi 150 rad/s. This is due to the dynamic amplification ofthe additional dummy oscillator, whose resonant frequency isffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1� 2�f2p
�x ¼ 153:1 rad=s, and should not be regarded as a pitfallof the proposed approach. Indeed, the resonant frequency of thedummy oscillator is always larger than the highest modal fre-quency retained in the analysis, i.e. �x > xm, which in turn shouldbe larger than the maximum frequency of the dynamic input [9].The accuracy of the DyMAM correction is guaranteed by satisfyingthese inequalities.
In a second stage, time-history analyses have been carried outon the objective truss. The seismic input has been selected as asweep function, able to excites in sequence the first four modesof vibration of the structure:
wðtÞ ¼ sinðxf ðtÞtÞ; ð63Þ
where:
xfðtÞ ¼ 4:35þ 2:314t; ð64Þ
and the duration of the forcing function is tf = 20 s. Top part of Fig. 3offers the time histories of strain and strain rate for the horizontalbar e = 21 as evaluated by considering all the m = n = 40 modes,which are virtually exact. Approximate responses obtained withjust m = 4 modes have been also computed, and the discrepancieswith respect to exact responses are depicted in the bottom graphsof Fig. 3. Being at same scale, a visual comparison of these threephase planes is possible, which reveals the inadequacy of theMDM (left), along with the improved accuracy of the proposedDyMAM (right) with respect to the classical MAM (centre). Impor-tantly, it has been possible to correct the strain rate with theMAM just because in this case the input w(t) is given by an analyt-ical waveform, and hence the time derivative _wðtÞ of the input isavailable, while the DyMAM does not suffer from this limitation,being applicable for any input, e.g. recorded accelerograms.
In a third stage, the performances of the proposed DyMAM inpresence of random loadings have been investigated. To do so, theground acceleration w(t) has been modelled as a non-stationaryzero-mean Gaussian process, fully defined by the auto-correlationfunction:
Rwwðt; sÞ ¼ rwðmaxft; sgÞ2 1� jt � sjkðmaxft; sgÞ
� �� Uðkðmaxft; sgÞ � jt � sjÞ; ð65Þ
where time-varying standard deviation rw(t) and correlation timek(t) of the seismic input are given by:
rwðtÞ ¼
0 t 6 0 _ t P tf ;
sin 2pt=tfð Þ 0 < t < 0:25 tf ;
1 0:25 tf < t < 0:75 tf ;
� sin 2pt=tfð Þ 0:25 tf < t < tf ;
8>>><>>>: ð66aÞ

852 A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854
kðtÞ ¼min t; k0 0:1þ 0:9e�10ðt�k0Þ=tf � �
; ð66bÞ
tf = 30 s being the duration of the stochastic excitation, while k0 isthe reference value of the correlation time, which has been assumedto be either 3.0 or 0.3 s. Standard deviation, correlation time and
Fig. 4. Evolutionary standard deviation (left), correlation time (centre
Fig. 5. Evolutionary variances of strain (top) and strain rate (bottom) in the element e =
auto-correlation function of the seismic input are depicted inFig. 4 for k0 = 3.0 s.
It is possible to prove that, for the selected random loading, theinput–output cross-correlation functions of Eq. (64) take theform:
) and auto-correlation function (right) of the random excitation.
21 for long (k0 = 3.0 s, left) and short (k0 = 0.3 s, right) correlation time of the input.

A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854 853
E xðtÞwðtÞh i ¼ eC00ðkðtÞÞ � f Rwwðt; tÞ; ð67aÞE yðtÞwðtÞh i ¼ C00ðkðtÞÞ � f Rwwðt; tÞ: ð67bÞ
Knowing the forcing terms in the right-hand side of Eqs. (63),the numerical solutions of Eq. (65) have been used to evaluatethe second-order statistics for the state variables listed in the ar-rays x(t) and y(t), which in turn allow computing the second-orderstatistics of displacements, strains and stresses in the structure,along with their time derivatives. For illustrative purposes, theevolutionary variance of strain (top graphs) and strain rate (bottomgraphs) in the element e = 21 of the objective truss are depicted inFig. 5 for two reference values of the correlation time of the input.The exact variances obtained with m = n = 40 modes are shownwith solid lines, while the approximate variances given by classicalMDM (i.e. without modal correction) and proposed DyMAM withm = 2 (circles), 4 (squares) and 6 (crosses) modes are shown withdot-dashed and dashed lines, respectively. It emerges that theplain MDM heavily underestimates strain and strain rate of thebar, which may lead in practice to unconservative design, particu-larly for the fatigue limit state. The proposed DyMAM correction isable to greatly improve the results. Specifically, the convergence tothe exact variances of the strain is monotonic, and just m = 4modes are enough to gain an excellent agreement with the exactvalues. The convergence in terms of strain rate is more erratic,although also in this case the DyMAM correction performs muchbetter than the plain MDM. Importantly, the classical MAM cannotbe applied directly to the strain rate, since the second-order statis-tics of the time derivative _wðtÞ of the input would be required.
7. Concluding remarks
Practical importance of modal correction methods in the dy-namic analysis of linearly-behaving structures has been empha-sised, along with the theoretical and computational problemswhich may arise in the application of existing techniques. Aimedat overcoming these limitations, a novel DyMAM correction, i.e. adynamic modal acceleration method, has been proposed andnumerically validated.
The proposed approach has been initially formulated under theassumption of deterministic dynamic loadings, and successivelyextended to cope with of random excitations. The basic idea is tointroduce an additional dummy oscillator to filter each dynamicloading, and to correct the structural response given by a plainMDM (modal displacement method) with the outputs of these fil-ters. The undamped circular frequency of the dummy oscillators isobtained by applying the machinery of Rayleigh’s quotient to thereduced structure, where the contribution of the modes alreadyconsidered in the MDM is removed, while the viscous damping ra-tio is computed according to the Rayleigh’s damping. Similarexpressions have been derived for both discrete and continuoussystems, which require the evaluation of reduced flexibility matrixand reduced Greens function, respectively. The Kronecker’s algebrahas been extensively used to derive in compact form the differen-tial equations ruling the evolution in time of the second-order sta-tistics of the structure vibrating under Gaussian processes. For bothproblems, efficient step-by-step schemes of numerical solution,and closed form-expressions have been provided for the integra-tion operators. Numerical examples included in the paper demon-strate accuracy and versatility of the proposed DyMAM correction,whose performances are consistently better than those of the verypopular MAM (modal acceleration method) correction.
Among the main advantages of the proposed DyMAM: (i) easeof implementation, since the corrective term simply involves aset of additional single-DoF oscillators, whose equations of motionare decoupled; (ii) simultaneous correction of strain and strain
rate, without the need of differentiating the dynamic loadings (likein the MAM, for instance); (iii) applicability even in presence ofGaussian processes with an infinite variance (e.g. white noise),while MAM and other techniques fail to do so. Even if specificinvestigations have not been performed at this stage, it is safe tosay that the proposed DyMAM correction is computationally com-petitive, as the additional burden due to the dummy oscillators islow. Importantly, matrix operations required by the DyMAM arevery similar to those of the classical MAM, and hence the addi-tional memory demand for the corrective term in the proposedtechnique can be similarly handled.
Further studies will be devoted to extend the DyMAM correc-tion to the seismic analysis of structures with the response spec-trum method and to the dynamic analysis of bridge structuressubjected to multi-DoF vehicles.
Appendix A. Integration operators (deterministic loads)
This appendix provides closed-form expressions for transitionmatrix eHðtÞ and loading matrices eC0ðtÞ and eC00ðtÞ, which have beenused as operators of numerical integration in Eq. (53a). The expres-sions of operators HðtÞ, C0ðtÞ and C00ðtÞ, appearing in Eq. (53b), canbe evaluated similarly.
The transition matrix eHðtÞ, t being the lag time, is by definitionthe exponential matrix of ½eDt�, in which eD is the matrix of coeffi-cients introduced in the first of Eq. (51).
This operator can be assembled as:
ðA:1Þ
where ~hðtÞ, _~hðtÞ and €~hðtÞ are the m-dimensional arrays listing thetime histories of displacement, velocity and acceleration experi-enced by the modal oscillators when a unit-step force is appliedfor t = 0. The generic jth elements of these arrays are known inclosed form:
~hjðtÞ ¼ ~cjðtÞ þ ~fj~sjðtÞ; ðA:2aÞ_~hjðtÞ ¼ � ~xj~sjðtÞ; ðA:2bÞ€~hjðtÞ ¼ � ~x2
j~cjðtÞ � ~fj~sjðtÞ� �
; ðA:2cÞ
where functions ~cjðtÞ and ~sjðtÞ are so defined:
~cjðtÞ ¼ cosð~XjtÞ � expð�~fj ~xjtÞ; ðA:3aÞ
~sjðtÞ ¼1ffiffiffiffiffiffiffiffiffiffiffiffiffi
1� ~f2j
q � sinðeXjtÞ � expð�~fj exjtÞ; ðA:3bÞ
with eXj ¼ffiffiffiffiffiffiffiffiffiffiffiffiffi1� ~f2
j
q~xj and j = 1 . . . m.
The evaluation of the loading matrices eC0ðtÞ and eC 00ðtÞ does re-quire simple matrix products:
eC 0ðtÞ ¼ eHðtÞ � 1teLðtÞ �
� eD�1; ðA:4aÞ
eC 00ðtÞ ¼ 1teLðtÞ � eI2m
�� eD�1; ðA:4bÞ
where:
eLðtÞ ¼ eHðtÞ � eI2m
h i� eD�1; ðA:5Þ
the inverse matrix eD�1 being known in closed form:
ðA:6Þ

854 A. Palmeri, M. Lombardo / Computers and Structures 89 (2011) 844–854
Appendix B. Kronecker’s algebra
This appendix offers definitions and properties of the Kronecker’salgebra which have been used in formulating the proposed DyMAMcorrection in presence of random dynamic loadings (Section 5).
Let A and B be two matrices of dimensions p � q and r � s,respectively. The Kronecker’s product of these two matrices, de-noted by A � B, is the matrix of order (pr) � (qs) obtained by mul-tiplying each element aij of A by the whole matrix B, that is:
ðB:1Þ
The Kronecker’s product does not enjoy the commutative prop-erty, i.e. in general A � B – B � A, while when the Kronecker’sproduct is applied to ordinary products of matrices, the followingrelationship holds:
½A � B� � ½C � D� ¼ ½A � C� � ½B � D�: ðB:2Þ
Finally, the kth Kronecker’s power of a matrix A can be ex-pressed recursively in the following form:
A½1� ¼ A; A½kþ1� ¼ A½k� � A: ðB:3Þ
Appendix C. Integration operators (random loads)
This appendix offers the expressions for evaluating the integra-tion operators appearing in the differential equations ruling thesecond-order statistics for the DyMAM correction.
The transition matrices H2 can be computed as Kronecker’ssquare and Kronecker’s product of those of the deterministic sys-tem [22]:eH2ðDtÞ ¼ eHðDtÞ½2�; ðC:1aÞH2ðDtÞ ¼ HðDtÞ½2�; ðC:1bÞbH2ðDtÞ ¼ eHðDtÞ �HðDtÞ: ðC:1cÞ
The loading matrices W2 for a one-variate seismic input are gi-ven by:
eW2ðDtÞ ¼ 12eH2ðDtÞ � I4m2
h i� eD � I2m þ I2m � eDh i�1
� eV � I2m þ I2m � eVh i; ðC:2aÞ
W2ðDtÞ ¼ 12
H2ðDtÞ � I4‘2
� �� D� I2‘ þ I2‘ � D� ��1 � V � I2‘ þ I2‘ � V
� �;
ðC:2bÞ
bW02ðDtÞ ¼ 12bH2ðDtÞ � I4m‘
h i� eD � I2‘ þ I2m � Dh i�1
� I2m � V� �
;
ðC:2cÞ
bW002ðDtÞ ¼ 12bH2ðDtÞ � I4m‘
h i� eD � I2‘ þ I2m � Dh i�1
� eV � I2‘
h i:
ðC:2dÞ
References
[1] European Committee for Standardisation. Eurocode 8: design of structures forearthquake resistance; 2004.
[2] Bisplinghoff RL, Ashley H, Halfman RL. Aeroelasticity. Cambridge, Mass,USA: Addison-Wesley; 1994.
[3] Maddox NR. On the number of modes necessary for accurate response andresulting forces in dynamic analyses. J Appl Mech (ASME) 1975;42:516–7.
[4] Schuëller G, Pradlwarter H, Schenk C. Non-stationary response of large linearFE models under stochastic loading. Comput Struct 2003;81(8–11):937–47.
[5] Camarda CJ, Haftka RT, Riley MF. An evaluation of higher-order modal methodsfor calculating transient structural response. Comput Struct 1987;27(1):89–101.
[6] Akgun MA. A new family of mode-superposition methods for responsecalculations. J Sound Vib 1993;167:289–302.
[7] Borino G, Muscolino G. Mode-superposition methods in dynamic analysis ofclassically and non-classically damped systems. Earthquake Eng Struct Dynam1986;14:705–17.
[8] D’Aveni A, Muscolino G. Improved dynamic correction method in seismicanalysis of both classically and non-classically damped structures. EarthquakeEng Struct Dyn 2001;30:501–1517.
[9] Di Paola M, Failla G. A correction method for dynamic analysis of linearsystems. Comput Struct 2004;82:1217–26.
[10] Pesterev A, Bergman L. An improved series expansion of the solution to themoving oscillator problem. J Vib Acoust (ASME) 2000;122(1):54–61.
[11] Biondi B, Muscolino G, Sidoti A. Methods for calculating bending moment andshear force in the moving mass problem. J Vib Acoust – Trans ASME2004;126(4):542–52.
[12] Biondi B, Muscolino G. New improved series expansion for solving the movingoscillator problem. J Sound Vib 2005;281(1–2):99–117.
[13] Bilello C, Di Paola M, Salamone S. A correction method for dynamic analysis oflinear continuous systems. Comput Struct 2005;83(1–2):8–9.
[14] Bilello C, Di Paola M, Salamone S. A correction method for the analysis ofcontinuous linear one-dimensional systems under moving loads. J Sound Vib2008;315:226–38.
[15] Maldonado G, Singh MP, Suarez L. Random response of structures by a forcederivative approach. J Sound Vib 1992;155(1):13–29.
[16] Benfratello S, Muscolino G. Mode-superposition correction method fordeterministic and stochastic analysis of structural systems. Comput Struct2001;79:2471–80.
[17] Cacciola P, Maugeri N, Muscolino G. A modal correction method for non-stationary random vibrations of linear systems. Probabilist Eng Mech2007;22:170–80.
[18] Sherman J, Morrison WJ. Adjustment of an inverse matrix corresponding to achange in one element of a given matrix. Ann Math Stat 1950;21(1):124–7.
[19] Caughey TK, O’Kelly MEJ. Classical normal modes in damped linear dynamicsystems. J Appl Mech (ASME) 1965;32:583–8.
[20] Bathe KJ. Finite element procedures. Prentice Hall; 1996.[21] Warburton G. Rayleigh’s contributions to modern vibration analysis. J Sound
Vib 1983;88(2):163–73.[22] Di Paola M. Moments of non-linear systems. In: Probabilistic methods in civil
engineering – 5th ASCE specialty conference. Blacksburg, US; 2004. p. 285–8.