A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision...
20
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision Marcel-Titus Marginean and Chao Lu A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision Marcel-Titus Marginean and Chao Lu Computer and Information Sciences, Towson University 8000 York Rd, Towson, MD 21252, USA [email protected] [email protected]
-
Upload
george-haynes -
Category
Documents
-
view
219 -
download
0
Transcript of A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision...

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Computer and Information Sciences, Towson University8000 York Rd, Towson, MD 21252, USA
[email protected]@towson.edu

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
System Overview
Paper: A Distributed Processing Architecture for Vision Based Domestic Robot Navigation
Performing CPU intensive tasks on Base Station
Aid robot navigation with external information from fixed camera
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
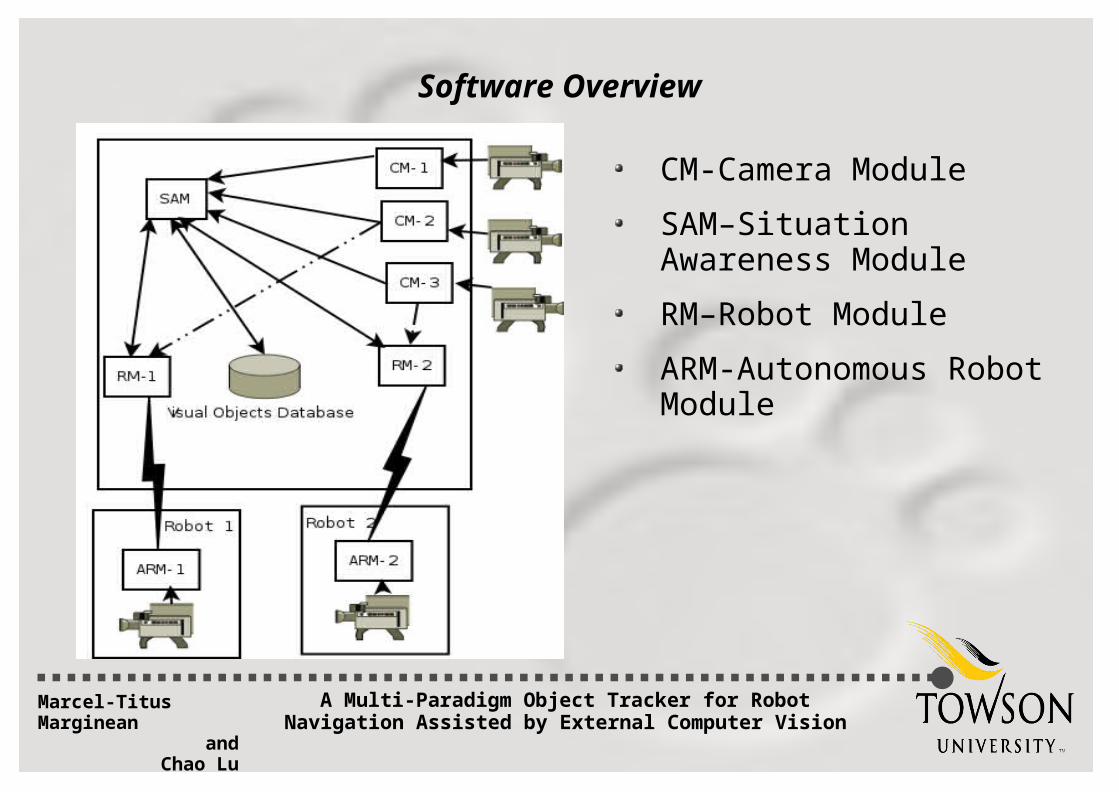
Software Overview
CM-Camera Module
SAM–Situation Awareness Module
RM–Robot Module
ARM-Autonomous Robot Module
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
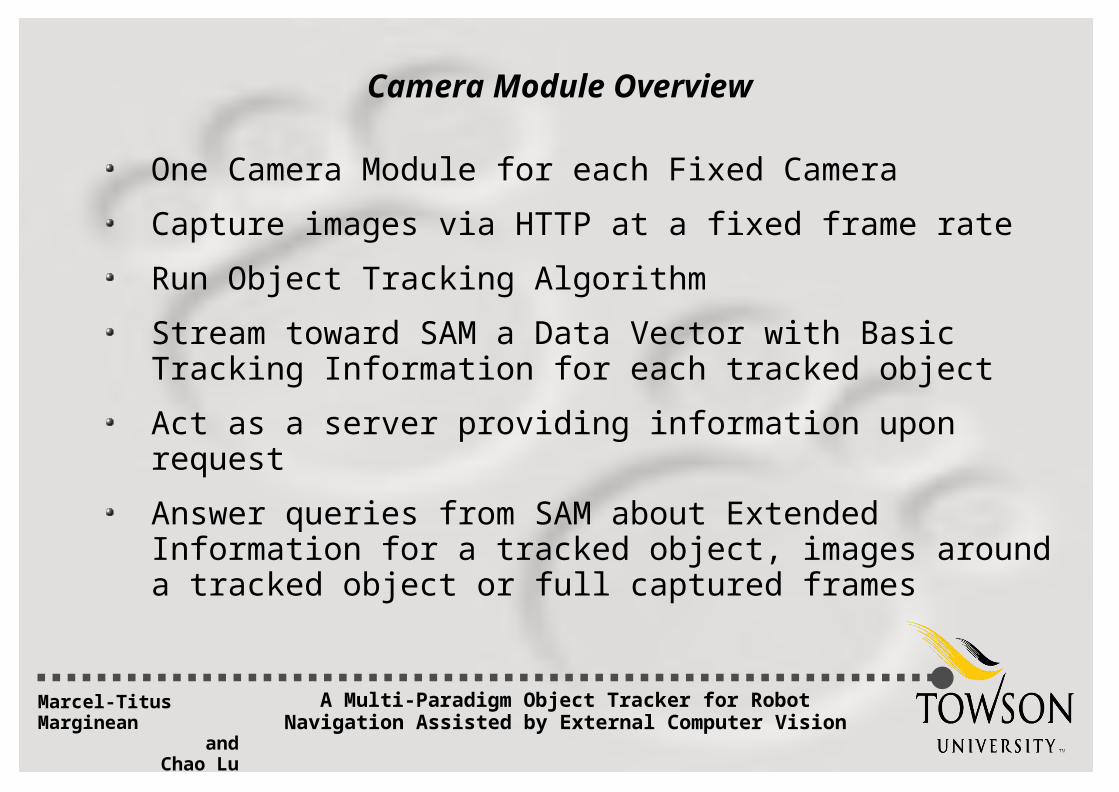
Camera Module Overview
One Camera Module for each Fixed Camera
Capture images via HTTP at a fixed frame rate
Run Object Tracking Algorithm
Stream toward SAM a Data Vector with Basic Tracking Information for each tracked object
Act as a server providing information upon request
Answer queries from SAM about Extended Information for a tracked object, images around a tracked object or full captured frames

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
MP-Tracker Highlights
Employs a novel combination of already known computer vision algorithms in order to fulfill the following requirements
Detection and tracking of multiple moving objects
Able to cope with temporary occlusions as a result of moving
Able to cope with sudden changes in direction of movement
Efficient use of CPU allowing multiple trackers to run on the same computer
Low CPU usage when idle allowing other less priority tasks to share the system

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Related Work
Multiple Hypothesis Tracking (MHT) by Donald Reid for RADAR in his seminal paper from 1979
MHT adapted for Computer Vision by Antunes, de Matos and Gaspar
Background subtraction and segmentation has been used for tracking vehicles on highway by Jun,Aggarwal and Gokmen
Raw Lucas-Kanade method for tracking has been used by Bissacco and Ghiasi taking advantage by specialized accelerated hardware to achieve real time operation
An application of Histograms in tracking has been presented by Benfold and Reid

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Method Overview
Multi-stage approach to tracking. First step is motion blobs detection
Generate a set of “One-to-Many” association hypothesis between already tracked targets and newly detected motion blobs
Refine the hypothesis in subsequent steps by employing various computer vision techniques
After each step we extract the hypothesis that can be picked unambiguously easing the load for the following steps
The motion blobs that were not associated with any target are candidates to be checked by MHT against previous leftover blobs to create new targets – Target Initilization
The leftovers after this step are put in history for next frame
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
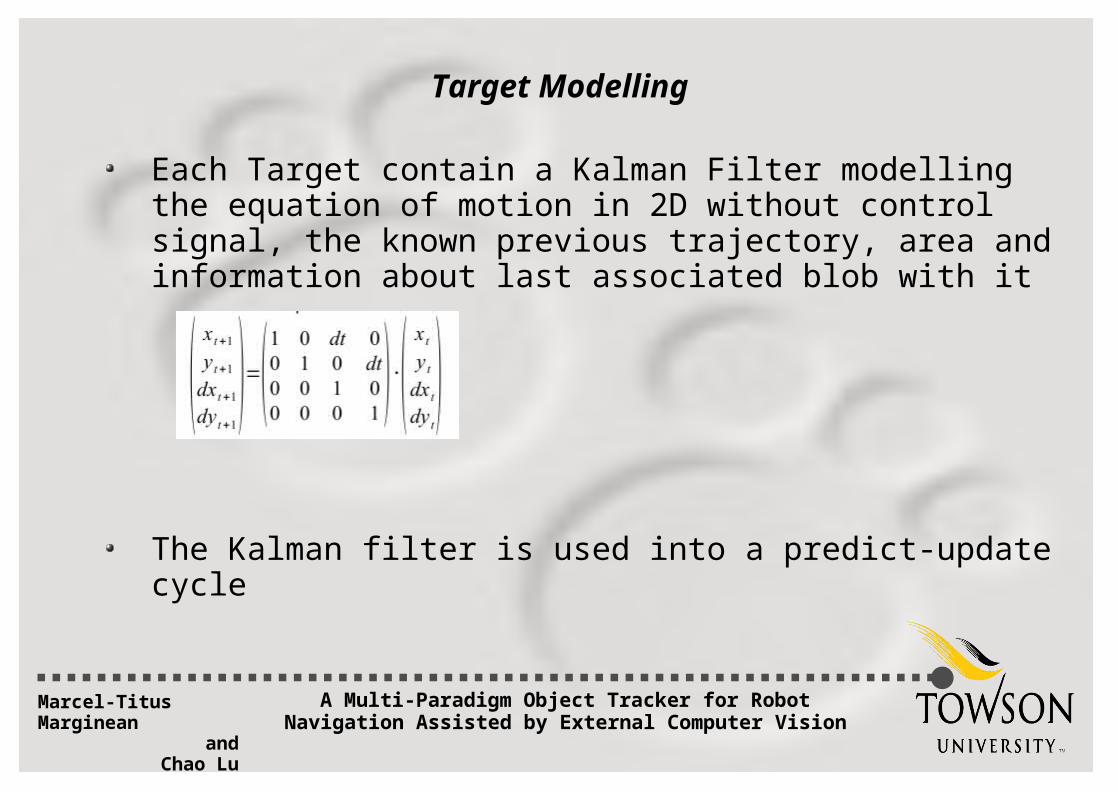
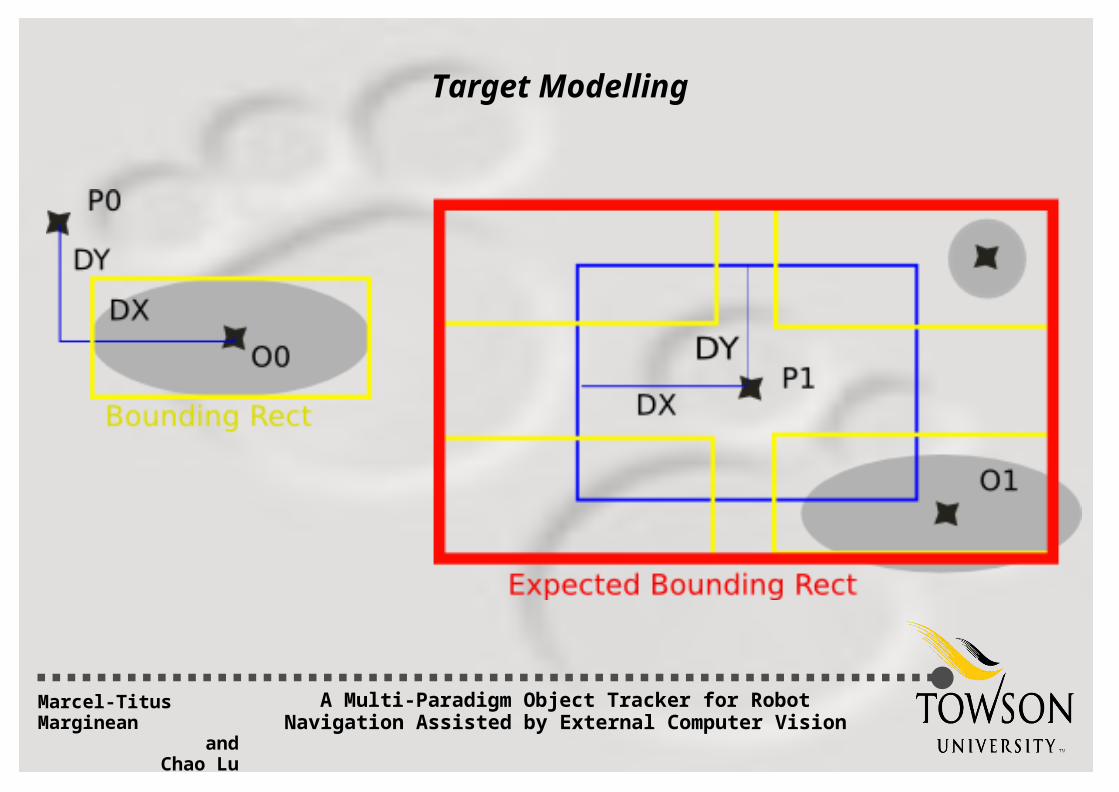
Target Modelling
Each Target contain a Kalman Filter modelling the equation of motion in 2D without control signal, the known previous trajectory, area and information about last associated blob with it
The Kalman filter is used into a predict-update cycle
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Target Modelling

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Hypothesis Management
Each Hypothesis is a triplet {TargetID, set<BlobID>, confidence}
The original confidence value is in reverse proportionality with the size of Uncertainty Rectangle
Ambiguity arise when two or more EBR intersect the same Blob
Ambiguity Resolving Algorithm update each Hypothesis confidence at every step based on the Score calculated on that step with formula: Conf=(1-α)Conf + α*Score
The coefficient depends on the level of trust into the accuracy of a given algorithm, level of trust assigned originally by experimental method and adjusted based on particular situation detected on the current frame.

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Hypothesis Management
Two methods of extracting a hypothesis: Unambiguous Picking and Ambiguous Picking
Refining steps attempts to allocate the blobs set unambiguously and updates the overall confidence in the hypothesis
Unambiguous Picking – pick any hypothesis with confidence over an Unambiguous Threshold if it’s Blob Set is disjoint from any other Hypothesis set. Attempted after each refining step.
Ambiguous Picking attempted once after all refining steps. It picks any hypothesis over a High Threshold Level if any hypothesis claiming the same Blob have a confidence level bellow a very Low Threshold
High Threshold > Unambiguous Threshold > Low Threshold

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Fuzzy Histogram
First Computer Vision method used in hypothesis refinement. Used both for Target / Blob association as well as for new Target initialization from Leftover Blobs
The FH is calculated over the pixels from the image that are located on top of a Motion Blob
Three Dimensional Histogram in RGB space with a small number (4..6) of sampling points
Classic Trapezoidal membership function
Comparison between two histogram is being done by calculation of a matching score

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Fuzzy Histogram
Classic Trapezoidal membership function
Score function used to compare two Fuzzy Histograms match

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Area Matching
The algorithm assumes that most of the time the object is not occluded
In that case changes in area of the blobs are relative small from frame to frame
An area matching score is calculated as the fraction between the smallest and largest area of the Motion Blob in two subsequent frames
An occlusion detection algorithm attempts to adjust the weight associated with this test whenever an occlusion is suspected
An occlusion is suspected when the blobs suffer larger than expected changes in size on the direction of motion

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Lucas-Kanade Matching
Sparse Optical Flow method detects matching points in two subsequent images
CPU intensive, it is not used on whole image but only on the cropped images around Blobs of interest
Shi-Tomasi corners are calculated on the rectangle of interests and are filtered only those located on or at the boundary of Motion Blobs.
Filtered features are passed to LK Optical Flow function for matching
Requires the Motion Blobs to have a certain size otherwise can not work

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
End of Frame Processing
Second Chance Algorithm uses MSER segmentation to try to disambiguate between objects so close that their motion blobs merged, then Lucal-Kanade matching is restarted filtered by the segmented regions
Target Initialization checks the current un-associated blobs against the recent history of un-associated blobs using MHT to initialize new Targets
Any leftover blob is added to the recent history list to be checked by subsequent frames
Targets that were “Lost” for too long are removed from the system. The amount of time for removal is smaller for Targets on a trajectory that takes them out of the field of view
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Conclusions
Successfully tracked two RC vehicles and one person from a 640x480 IP camera mounted on the wall near ceiling overlooking the room
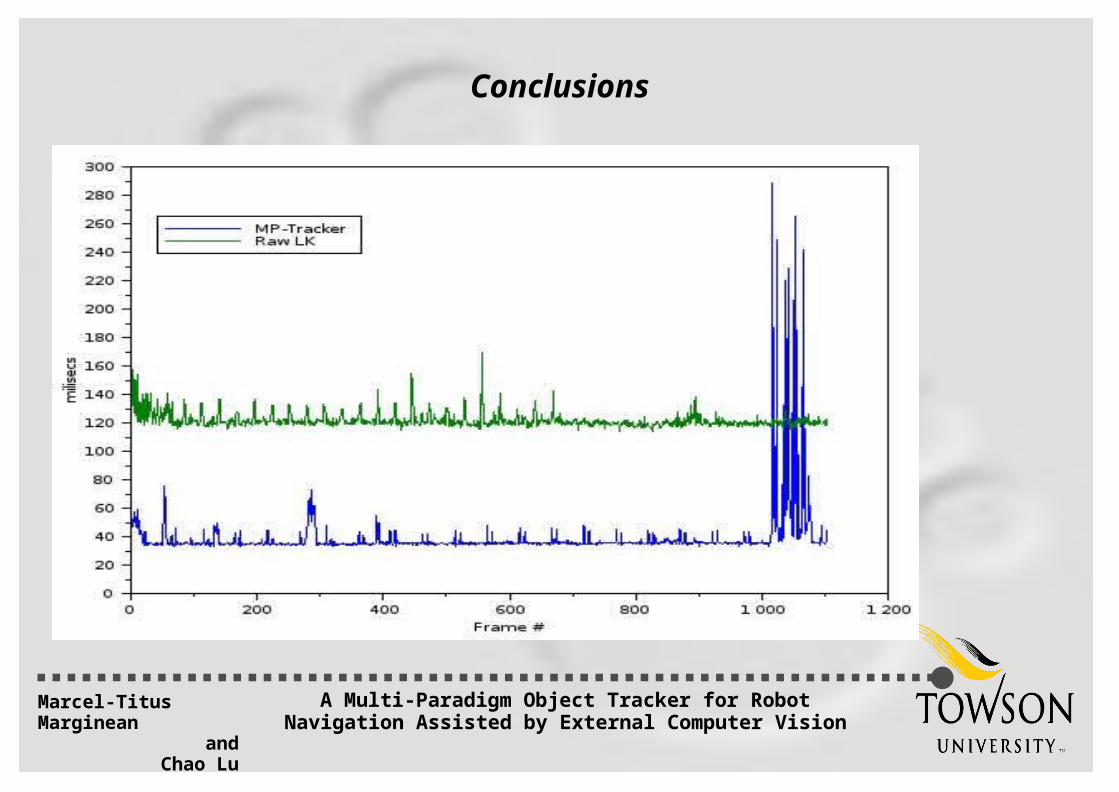
Comparison of average tracking time showed MP-Tracker over performing raw Lucas-Kanade matching of the whole image by a factor of 3 times (avg: 39.5 ms vs 121.5 ms respectively) on Pentium E5200 @ 2.5 Ghz
Having an average time bellow 50 ms/frame makes MP-Tracker suitable for robot-tracking
On un-occluded videos MP-Tracker is able to track two RC vehicles by Kalman Filter, Histogram and Area matching alone without LK or segmentation in over 95% of the frames.
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Conclusions

A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Conclusions
The performance degrade significantly when the person walk close to the camera occluding most of the field of view.
Exploring alternatives for Second Chance Algorithm, like contour matching or less CPU intensive segmentation methods
Stop the tracking after a Hard Real-Time limit and broadcast predicted positions with very low confidence level
SAM will rely more on the tracking from the other camera or do it own prediction of 3D trajectory
The high performance on the “average” situations makes MP-Tracker a really promising algorithm for robot operations assisted by external CV once these issues are solved.
A Multi-Paradigm Object Tracker for Robot Navigation Assisted by External Computer Vision
Marcel-Titus Marginean and Chao Lu
Questions and Thank you!
? ? ?



