A Movement Recognition Method using LBP
13
A Movement Recognition Method using Loopy Belief Propagation on Mobile Devices Irene Li 1 and Toyo Suzumura 1,2 1 University College Dublin, Ireland 2 IBM T.J. Watson Research Center, USA
-
Upload
irene-li -
Category
Data & Analytics
-
view
58 -
download
0
Transcript of A Movement Recognition Method using LBP

A Movement Recognition Method using Loopy Belief Propagation
on Mobile Devices
Irene Li 1 and Toyo Suzumura1,2
1University College Dublin, Ireland2IBM T.J. Watson Research Center, USA

Motivations• Inference on Graphic Models
- Inference Algorithm: to make inference or predictions on uncertain vertexes of Graphic Models.
- Powerful CPU on Mobile: support computations on mobile devices.
• Physical Sensors- iOS Devices (iWatch): designed for sports use and the
monitor of health conditions.- Healthcare Data Collection: possible for health analysis
based on time series ( like movements and heart beats). Here we focus on the recognition of movements from the velocity data.

Proposed Approach (1) : Algorithm Introduction
1. Loopy Belief Propagation [1]
Loppy Belief Propagation ( sum-product algorithm) a dynamic programming approach to answering conditional probability queries in a graphical model.
A parallel message-passing algorithm, keep passing messages, until a stable belief state.

Proposed Approach (1) : Algorithm Introduction
1. Loopy Belief Propagation [1]
Peer-pressure: a final belief distribution by listening to neighbors. Exchange messages: adjacent nodes, update beliefs, based on conditional probabilities, etc.
Every node sends a probability density to its neighbors, the message to neighbor depends on messages received from all the other neighbors.

Proposed Approach (1) : Algorithm Introduction
2. L-BP on Bayesian Networks [2].
Prior Probability of R,S
Boundary conditions P(W|R) and P(H|R,S)
Belief (Probability of each state) of W/H ?
Bayesian Network: a direct graph.
We use L-BP on the inference of unknown nodes in a Bayesian Network.
An example [3] is shown in the graph: assume node R and S are known, and the relations of R and W, R and S, R and H.Use L-BP to find out the state of W and H.
? ?
√
√√√
√
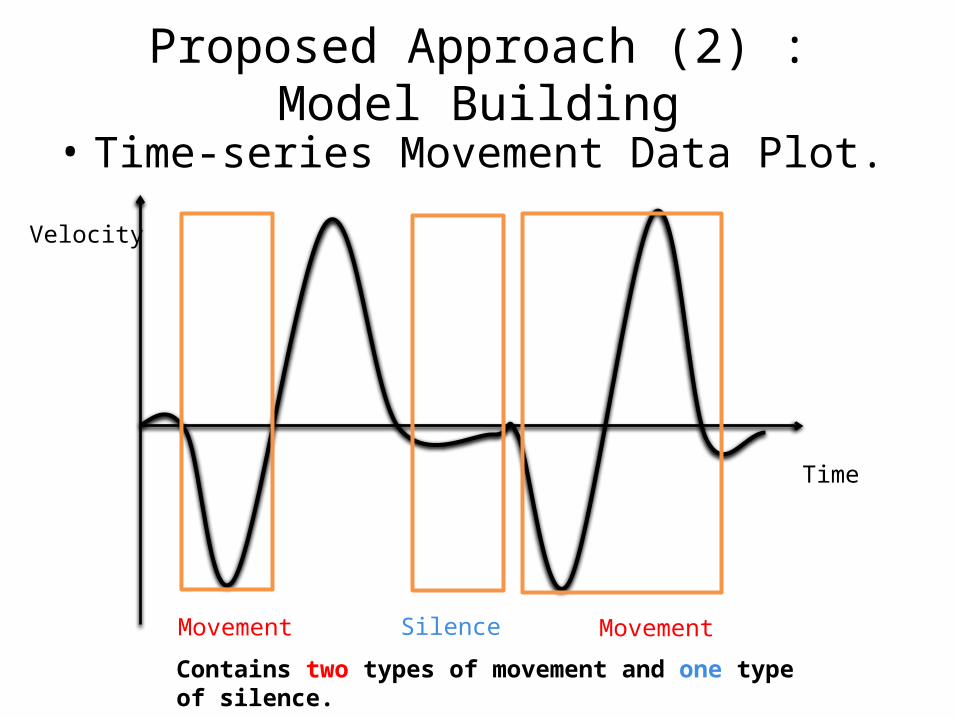
Proposed Approach (2) : Model Building• Time-series Movement Data Plot.
Velocity
Time
Silence MovementMovement
Contains two types of movement and one type of silence.

Proposed Approach (2) : Model Building
• Model Building.
Node 1
In the series, the three states (silence and two types of movements) always appear one by one, which means they have the relationship of transaction. So we built the model in the right.
Node 0
Node -1Model Built

ImplementationThere are mainly 6 sections in the project, among which 2 of them were written for future extension.
· BayesianNetwork: the data structure of the Bayesian network, including three classes: Edge, Vertex and SwiftGraph.· BeliefTable: The essential part of BP algorithm, including BeliefTable class and BeliefRow class. In BeliefTable, some equators were implemented. · ConditionalPropability: The data structure for prior probability table. Examples also can be found in the comments.· StatTools: Including math functions, like dot product.· Node and StateKeys: To be extended: define multiple states.

Evaluation (1) : Training Data
• Training Data[3] : A number of healthy volunteers were selected to participate in the experiment. Sensor units have been used to this experiment of recognizing movements.
After data cleaning, the plot, generated by Java AWT, illustrates the velocities in 3-dimension space in a time series.
Training Data Plot (part)

Evaluation (2) : Plan• Model Building:
Use Maximum Likelihood Estimation (still uncertain) to calculate prior probabilities and CPT of some vertexes.• Algorithm Applying:
Use the Loopy BP to calculate the Belief to make predictions, and get the predicted movement recognition series. Then manually check the recognition accuracy of human movements. • Evaluation Method:
Compare with other recognition methods. Focus on computation time, memory usage and recognition accuracy. To show the comparison and improvements.

Key Finding• Data pre-processing of human movements.
The quality of the data will effect the accuracy of the algorithm. We used the movement series with some good features, which contain less errors and noises, as the input of testing.
Variability in human movements is a big difficulty in online segmentation. The performance in one single exercise shows the variability in the movements of the people with different ages, genders, weights and other body conditions. The future works can focus on this part, from data cleaning point of view.

References[1] Understanding Belief Propagation and its Generalizations, Jonathan S. Yedidia, William T. Freeman, and Yair Weiss TR2001-22 November 2001
[2] Loopy Belief Propagation for Approximate Inference: An Empirical Study, Kevin P. Murphy and Yair Weiss and Michael I. Jordan
[3] http://www.cse.unsw.edu.au/~cs9417ml/Bayes/Pages/PearlPropagation.html
[3] Evaluating Rehabilitation Exercise Performance Using a Single Inertial Measurement Unit, Oonagh Giggins, Daniel Kelly and Brian Cauleld in International Conference on Pervasive Computing Technologies for Healthcare and Workshops, 2013 7th
Thanks!Q & A
Special thanks to Dr.Bingquan Huang1, who contributed to the original idea.We also appreciate the facilities and experiment data shared by the Insight Data Centre, UCD.1Researcher, University College Dublin, Ireland