A Comparative Theoretical and Computational Study on ...for the worst-case probability distributions...
37
Published: July 27, 2011 r2011 American Chemical Society 10567 dx.doi.org/10.1021/ie200150p | Ind. Eng. Chem. Res. 2011, 50, 10567–10603 ARTICLE pubs.acs.org/IECR A Comparative Theoretical and Computational Study on Robust Counterpart Optimization: I. Robust Linear Optimization and Robust Mixed Integer Linear Optimization Zukui Li, Ran Ding, and Christodoulos A. Floudas* Department of Chemical and Biological Engineering, Princeton University, Princeton, New Jersey 08544, United States ABSTRACT: Robust counterpart optimization techniques for linear optimization and mixed integer linear optimization problems are studied in this paper. Different uncertainty sets, including those studied in literature (i.e., interval set; combined interval and ellipsoidal set; combined interval and polyhedral set) and new ones (i.e., adjustable box; pure ellipsoidal; pure polyhedral; combined interval, ellipsoidal, and polyhedral set) are studied in this work and their geometric relationship is discussed. For uncertainty in the left-hand side, right-hand side, and objective function of the optimization problems, robust counterpart optimization formulations induced by those different uncertainty sets are derived. Numerical studies are performed to compare the solutions of the robust counterpart optimization models and applications in refinery production planning and batch process scheduling problem are presented. 1. INTRODUCTION In many optimization applications, the problem data is assumed to be known with certainty. However, that is seldom the case in practice. Very often, the realistic data are subject to uncertainty due to their random nature, measurement errors, or other reasons. Since the solution of an optimization problem often exhibits high sensitivity to the data perturbations as illustrated by Ben-Tal and Nemirovski, 1 ignoring the data uncertainty could lead to solutions which are suboptimal or even infeasible for practical applications. Robust optimization belongs to an important methodology for dealing with optimization problems with data uncertainty. In the first stage of this type of method, a deterministic data set is defined within the uncertain space, and in the second stage the best solution which is feasible for any realization of the data uncertainty in the given set is obtained. The corresponding second stage optimization problem is also called robust counterpart optimization problem. One major motivation for studying robust optimization is that in many applications the data set is an appropriate notion of parameter uncertainty, e.g., for applications in which infeasibility cannot be accepted at all (e.g., design of engineering structures like bridges considered in Ben-Tal and Nemirovski 2,3 ), and for those cases that the parameter uncertainty is not stochastic, or if no distributional information is available. One of the earliest papers on robust counterpart optimization is related to the work of Soyster, 4 who considered simple perturba- tions in the data and aimed at finding a reformulation of the original linear programming problem such that the resulting solution would be feasible under all possible perturbations. This approach, however, is the most conservative one since it ensures feasibility against all potential realizations. Thus, it is highly desirable to provide a mechanism to allow trade-off between robustness and performance. To address the issue of overconservatism in worst-case models, Ben- Tal, Nemirovski and co-workers 1,57 , and El-Ghaoui and co- workers 8,9 independently proposed the ellipsoidal-set-based robust counterpart formulation for dealing with parameter uncertainty within linear and quadratic programming problems. El-Ghaoui and Lebret 8 studied the robust solutions to the uncertain least-squares problems, and El-Ghaoui et al. 9 studied uncertain semidefinite problems. Ben-Tal and Nemirovski 6,7 showed that when the uncertainty sets for a linear constraint are ellipsoids, the robust formulation turns out to be a conic quadratic problem. Ben-Tal et al. 5 considered LP problems where some of the decision variables must be determined before the realization of uncertain data, while the other decision variables can be set after the realization. The robust optimization formulation introduced for linear programming problems with uncertain linear coefficients was extended by Lin et al. 10 and Janak et al. 11 to mixed integer linear optimization (MILP) problems under uncertainty. They developed the theory of the robust optimization framework for general mixed- integer linear programming problems and considered both bounded and several known probability distributions. The robust optimiza- tion framework is later extended by Verderame and Floudas 12 who studied both continuous (general, bounded, uniform, normal) and discrete (general, binomial, Poisson) uncertainty distributions and applied the framework to operational planning problems. The work was further compared with the conditional-value risk based method in Verderame and Floudas. 13 For a recent review on planning and scheduling under uncertainty, the reader is directed to Verderame et al. 14 and for process scheduling under uncertainty to Li and Ierapetritou. 15 Bertsimas and Sim 16 considered robust linear programming with coefficient uncertainty using an uncertainty set with bud- gets. In this robust counterpart optimization formulation, a budget parameter is introduced to control the degree of con- servatism of the solution. As it will be shown in this paper, this type of robust formulation is based on a combined interval and polyhedral uncertainty set. Bertsimas and co-workers 17 extended and applied a robust optimization framework in the fields of linear and discrete programming. Bertsimas et al. 18 characterized Received: January 21, 2011 Accepted: July 27, 2011 Revised: July 1, 2011
Transcript of A Comparative Theoretical and Computational Study on ...for the worst-case probability distributions...

Published: July 27, 2011
r 2011 American Chemical Society 10567 dx.doi.org/10.1021/ie200150p | Ind. Eng. Chem. Res. 2011, 50, 10567–10603
ARTICLE
pubs.acs.org/IECR
A Comparative Theoretical and Computational Study on RobustCounterpart Optimization: I. Robust Linear Optimization and RobustMixed Integer Linear OptimizationZukui Li, Ran Ding, and Christodoulos A. Floudas*
Department of Chemical and Biological Engineering, Princeton University, Princeton, New Jersey 08544, United States
ABSTRACT: Robust counterpart optimization techniques for linear optimization and mixed integer linear optimization problemsare studied in this paper. Different uncertainty sets, including those studied in literature (i.e., interval set; combined interval and ellipsoidalset; combined interval and polyhedral set) and new ones (i.e., adjustable box; pure ellipsoidal; pure polyhedral; combined interval,ellipsoidal, and polyhedral set) are studied in this work and their geometric relationship is discussed. For uncertainty in the left-hand side,right-hand side, and objective function of the optimization problems, robust counterpart optimization formulations induced by thosedifferent uncertainty sets are derived. Numerical studies are performed to compare the solutions of the robust counterpart optimizationmodels and applications in refinery production planning and batch process scheduling problem are presented.
1. INTRODUCTION
In many optimization applications, the problem data is assumedto be known with certainty. However, that is seldom the case inpractice. Very often, the realistic data are subject to uncertainty dueto their randomnature, measurement errors, or other reasons. Sincethe solution of an optimization problem often exhibits highsensitivity to the data perturbations as illustrated by Ben-Tal andNemirovski,1 ignoring the data uncertainty could lead to solutionswhich are suboptimal or even infeasible for practical applications.
Robust optimization belongs to an important methodologyfor dealing with optimization problems with data uncertainty. Inthe first stage of this type of method, a deterministic data set isdefined within the uncertain space, and in the second stage the bestsolution which is feasible for any realization of the data uncertaintyin the given set is obtained. The corresponding second stageoptimization problem is also called robust counterpart optimizationproblem. One major motivation for studying robust optimization isthat in many applications the data set is an appropriate notion ofparameter uncertainty, e.g., for applications in which infeasibilitycannot be accepted at all (e.g., design of engineering structures likebridges considered in Ben-Tal and Nemirovski2,3), and for thosecases that the parameter uncertainty is not stochastic, or if nodistributional information is available.
One of the earliest papers on robust counterpart optimizationis related to the work of Soyster,4 who considered simple perturba-tions in the data and aimed at finding a reformulation of the originallinear programming problem such that the resulting solution wouldbe feasible under all possible perturbations. This approach, however,is the most conservative one since it ensures feasibility against allpotential realizations. Thus, it is highly desirable to provide amechanism to allow trade-off between robustness and performance.To address the issue of overconservatism inworst-casemodels, Ben-Tal, Nemirovski and co-workers1,5�7, and El-Ghaoui and co-workers8,9 independently proposed the ellipsoidal-set-based robustcounterpart formulation for dealing with parameter uncertaintywithin linear and quadratic programming problems. El-Ghaoui andLebret8 studied the robust solutions to the uncertain least-squares
problems, and El-Ghaoui et al.9 studied uncertain semidefiniteproblems. Ben-Tal and Nemirovski6,7 showed that when theuncertainty sets for a linear constraint are ellipsoids, the robustformulation turns out to be a conic quadratic problem. Ben-Talet al.5 considered LP problems where some of the decision variablesmust be determined before the realization of uncertain data, whilethe other decision variables can be set after the realization.
The robust optimization formulation introduced for linearprogramming problems with uncertain linear coefficients wasextended by Lin et al.10 and Janak et al.11 to mixed integer linearoptimization (MILP) problems under uncertainty. They developedthe theory of the robust optimization framework for general mixed-integer linear programming problems and considered both boundedand several known probability distributions. The robust optimiza-tion framework is later extended by Verderame and Floudas12 whostudied both continuous (general, bounded, uniform, normal) anddiscrete (general, binomial, Poisson) uncertainty distributions andapplied the framework to operational planning problems. The workwas further compared with the conditional-value risk based methodin Verderame and Floudas.13 For a recent review on planning andscheduling under uncertainty, the reader is directed to Verderameet al.14 and for process scheduling under uncertainty to Li andIerapetritou.15
Bertsimas and Sim16 considered robust linear programmingwith coefficient uncertainty using an uncertainty set with bud-gets. In this robust counterpart optimization formulation, abudget parameter is introduced to control the degree of con-servatism of the solution. As it will be shown in this paper, thistype of robust formulation is based on a combined interval andpolyhedral uncertainty set. Bertsimas and co-workers17 extendedand applied a robust optimization framework in the fields oflinear and discrete programming. Bertsimas et al.18 characterized
Received: January 21, 2011Accepted: July 27, 2011Revised: July 1, 2011
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10568 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
the robust counterpart of a linear programming problem with anuncertainty set described by an arbitrary norm. The ideas of therobust optimization approach in Bertsimas and Sim16 have alsobeen extended to conic optimization problems in Bertsimas andSim,19 and also used by Bertsimas and Thiele20 to addressinventory control problems to minimize total costs.
Kouvelis and Yu21 proposed a framework for robust discreteoptimization, which seeks to find a solution that minimizes theworst case performance under a set of scenarios for the data.Chen and Lin22 proposed an approximate algorithm to solve therobust design problem in a stochastic-flow network. Atamt€urkand Zhang23 described a two-stage robust optimization approachfor solving network flow and design problems with uncertaindemand. They generalized the approach to multicommoditynetwork flow and design, and studied applications to lot-sizingand location-transportation problems. Atamt€urk24 introducedalternative formulations to robust mixed 0�1 programming withinterval uncertainty objective coefficients. Averbakh25 proposeda general approach for finding minmax regret solutions for a classof combinatorial problems with interval uncertain objectivefunction coefficients, based on reducing the problem withuncertainty to a set of deterministic problems. Kasperski andZielinski26 considered a similar class of problems and presented apolynomial time approximation algorithm. Bertsimas and Sim17
proposed an approach to address data uncertainty for discreteoptimization and network flow problems. They presented analgorithm for the special case of the robust network flow whereonly the objective uncertainty exists and the problem is a mixed0�1 problem, and solved the problem by considering a poly-nomial number of nominal minimum cost flow problems in amodified network.
Chen et al.27 proposed an asymmetrical uncertainty set thatgeneralizes the symmetric ones. Chen et al.28 studied therelationship between different conditional value-at-risk (CVaR)bound-based approximations to individual chance constraintsand different set-based robust optimization formulations andshowed the equivalence between them. Fischetti and Monaci29
developed a robustness framework denoted as a “light robust-ness” approach to cope with the issue of overly conservativesolutions in robust optimization. They placed a hard upperbound on the objective value and then minimized the degreeof infeasibility with a fixed uncertainty set.
As pointed out by Goh and Sim,30 if the exact distribution ofuncertainties is precisely known, optimal solutions to the robustproblem would be overly and unnecessarily conservative. Con-versely, if the assumed distribution of uncertainties is in factdifferent from the actual distribution, the optimal solution using astochastic programming approach may perform poorly. Soseveral recent works aim at bridging the gap between theconservatism of robust optimization and the specificity ofstochastic programming, where optimal decisions are soughtfor the worst-case probability distributions within a family ofpossible distributions, defined by certain properties such as theirsupport and moments. Specifically, El Ghaoui et al.31 developedworst-case value-at-risk (VaR) bounds for a robust portfolioselection problem when only the bounds on the means andcovariance matrix of the assets are known. Chen et al.27 intro-duced directional deviations as an additional means to character-ize a family of distributions that were applied by Chen and Sim32
to a goal-driven optimization problem. Delage and Ye33 studieddistributionally robust stochastic programs where the mean andcovariance of the primitive uncertainties are themselves subject
to uncertainty. Ben-Tal et al.34 proposed a framework for robustoptimization that relaxes the standard notion of robustness byallowing the decision maker to vary the protection level in asmooth way across the uncertainty set.
In this paper, we present a systematic study of the set-inducedrobust counterpart optimization techniques for both linearoptimization (LP) and mixed integer linear optimization(MILP) problems. The new contributions of the paper are asfollows: we have proposed several novel uncertainty sets (i.e.,adjustable box; pure ellipsoidal; pure polyhedral; combinedinterval, ellipsoidal, and polyhedral set) and derived their robustcounterparts for both LP andMILP problems; for the first time inthe literature, we have discussed the connection among sixdifferent uncertainty sets (including those studied in the litera-ture, that is, interval set introduced by Soyster,4 combinedinterval and ellipsoidal set introduced by Ben-Tal andNemirovski,1 combined interval and polyhedral set introducedby Bertsimas and Sim16) and the differences among theircorresponding robust counterparts, from both the geometricalpoint of view and the computational studies.
The paper is organized as follows. In section 2, we introducethe set-induced robust counterpart optimization for generallinear and mixed integer linear optimization problems. In section3, we introduce six different uncertainty sets and discuss theirrelationship from a geometric point of view. In section 4, wepresent the detailed robust counterpart formulations underdifferent uncertainty sets for linear constraints and the derivationprocedures. In section 5, a numerical example and a refineryproduction planning example are studied and the different robustcounterpart optimization models are compared. In section 6,robust counterparts for mixed integer linear optimization pro-blems are derived. In section 7, a numerical example and anapplication in process scheduling problem are presented. Finally,conclusions are presented in section 8.
2. UNCERTAINTY SET-INDUCED ROBUSTOPTIMIZATION
In set-induced robust optimization, the uncertain data areassumed to be varying in a given uncertainty set, and the aim is tochoose the best solution among those “immunized” against datauncertainty, that is, candidate solutions that remain feasible for allrealizations of the data from the uncertainty set.2.1. Robust Linear Optimization. Motivating Example 1.
Consider the following linear optimization problem:
max 8x1 þ 12x2s:t: ~a11x1 þ ~a12x2 e 140
~a21x1 þ ~a22x2 e 72x1, x2 g 0
Assume that the left-hand side (LHS) constraint coefficients ~a11,~a12, ~a21, ~a22 are subject to uncertainty and they are defined asfollows:
~a11 ¼ 10 þ ξ11, ~a12 ¼ 20 þ 2ξ12,
~a21 ¼ 6 þ 0:6ξ21, ~a22 ¼ 8 þ 0:8ξ22
where ξ11, ξ12, ξ21, ξ22 are independent random variables. Therandom variables are distributed in the range [�1, 1] (i.e., theconstraint coefficients ~a11, ~a12, ~a21, ~a22 have maximum 10%perturbation around their nominal values 10, 20, 6, 8,
babazadeh
Highlight
?
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10569 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
respectively). Under the set-induced robust optimization frame-work, finding a robust solution for the above example means tofind the best possible candidate solution such that the feasibilityof the constraints is maintained nomatter what value the randomvariables realize within a certain set that belongs to the uncertainspace defined by ξij ∈ [�1,1].In general, consider the following linear optimization problem
max cxs:t: ∑
j~aijxj e ~bi " i ð2:1Þ
where ~aij and ~bi represent the true value of the parameters whichare subject to uncertainty. Assume that the uncertainty affectingeach constraint is independent of each other and consider the ithconstraint of the above linear optimization problem where boththe LHS constraint coefficients and RHS parameters are subjectto uncertainty. Define the uncertainty as follows:
~aij ¼ aij þ ξijaij " j ∈ Ji ð2:2aÞ
~bi ¼ bi þ ξi0bi ð2:2bÞwhere aij and bi represent the nominal value of the parameters; aijand bi represent constant perturbation (which are positive); Jirepresents the index subset that contains the variable indiceswhose corresponding coefficients are subject to uncertainty; andξi0 and ξij "i, "j ∈ Ji are random variables which are subject touncertainty. With the above definition, the original ith constraintcan be rewritten as
∑j ˇ Ji
aijxj þ ∑j ∈ Ji
~aijxj e ~bi ð2:3Þ
which can be further reformulated as follows:
∑jaijxj þ �ξi0bi þ ∑
j ∈ Ji
ξijaijxj
" #e bi ð2:4Þ
In the set induced robust optimizationmethod, with a predefineduncertainty setU, the aim is to find solutions that remain feasiblefor any ξ in the given uncertainty setU so as to immunize againstinfeasibility, that is,
∑jaijxj þ ½max
ξ ∈ Uf�ξi0bi þ ∑
j ∈ Ji
ξijaijxjg� e bi ð2:5Þ
Finally, replacing the original constraint in LP problem 2.1 withthe corresponding robust counterpart constraints, the robustcounterpart of the original LP problem is obtained:
max cxs:t: ∑
jaijxj þ ½max
ξ ∈ Uf�ξi0bi þ ∑
j ∈ Ji
ξijaijxjg� e bi " i
ð2:6Þ
Motivating Example 1 (Continued). Applying the robustcounterpart formulation 2.6 to the two constraints of themotivating example 1, their corresponding robust counterpartconstraints become
10x1 þ 20x2 þ maxðξ11, ξ12Þ ∈ U1
fξ11x1 þ 2ξ12x2g e 140
6x1 þ 8x2 þ maxðξ21, ξ22Þ ∈ U2
f0:6ξ21x1 þ 0:8ξ22x2g e 72
where U1 and U2 are predefined uncertainty sets for (ξ11, ξ12)and (ξ21, ξ22), respectively.2.2. Robust Mixed Integer Linear Optimization. Motivat-
ing Example 2. Consider the following mixed integer linearoptimization problem:
max 3x1 þ 2x2 � 10y1 � 5y2s:t: x1 þ x2 e 20
x1 þ 2x2 e 12a31x1 þ b31y1 e 0a42x2 þ b42y2 e 0x1 � x2 e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g:
Assume that the left-hand side (LHS) constraint coefficients ofthe third and the fourth constraints are subject to uncertainty andthey are defined as follows:
a31 ¼ 1 þ 0:1ξ31, b31 ¼ � 20 þ 2ξ33,
a42 ¼ 1 þ 0:1ξ42, b42 ¼ � 20 þ 2ξ44
where ξ31, ξ33, ξ42, ξ44 are independent uncertain parametersdistributed in the range [�1,1]. The robust solution for theproblem is among the candidate solutions that remain feasiblefor all realizations of the data from the uncertainty set. Forexample, if the uncertainty set is defined as the boundedbox with range [�1,1] on each dimension, then the correspond-ing robust counterpart optimization solution should ensure thefeasibility of all the constraints for any possible values of theuncertain parameters and maximize the objective at thesame time.Generally, consider the following mixed integer linear optimi-
zation (MILP) problem
max ∑mcmxm þ ∑
kdkyk
s:t: ∑m~aimxm þ ∑
k
~bikyk e ~pi " ið2:7Þ
where x and y represent the continuous and integer variables,respectively, and ~aim, ~bik, ~pi represent the true value of theparameters which are possibly subject to uncertainty. Consid-ering the ith constraint of the above problem, we assume thatthe uncertain parameters in the ith constraint are defined asfollows:
~aim ¼ aim þ ξimaim, " m ∈ Mi ð2:8aÞ
~bik ¼ bik þ ξikbik, " k ∈ Ki ð2:8bÞ
~pi ¼ pi þ ξi0pi ð2:8cÞwhere Mi and Ki represent the subsets that contain thecontinuous and discrete variable indices whose correspondingcoefficients are subject to uncertainty, respectively; aim, bik, pirepresent the nominal value of the parameters; aim, bik, ~pirepresent positive constant perturbation; and ξim, ξik, ξi arerandom variables which are subject to uncertainty. With theabove definitions, the original ith constraint can be rewritten as
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10570 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
follows:
∑m ˇ Mi
aimxm þ ∑k ˇ Ki
bikyk þ ∑m ∈ Mi
~aimxm þ ∑k ∈ Ki
~bikyk e ~pi
ð2:9Þwhich after grouping the uncertain part can be further rewrittenas
∑maimxm þ ∑
kbikyk
þ f�ξi0pi þ ∑m ∈ Mi
ξimaimxm þ ∑k ∈ Ki
ξikbikykg e pi
ð2:10ÞWith a predefined uncertainty set U for the random variablesξ = {ξi0, ξim, ξik}, the objective is to find solutions that remainfeasible for any ξ in the set so as to immunize againstinfeasibility; that is,
∑maimxm þ ∑
kbikyk
þ maxξ ∈ U
f�ξi0pi þ ∑m ∈ Mi
ξimaimxm þ ∑k ∈ Ki
ξikbikykg e pi
ð2:11ÞCorrespondingly, the robust counterpart of the original MILPproblem is obtained by replacing the original ith constraint withits robust counterpart constraint 2.11:
max ∑mcmxm þ ∑
kdkyk
s:t: ∑maimxm þ ∑
kbikyk
þ maxξ ∈ U
f�ξi0pi þ ∑m ∈ Mi
ξimaimxm þ ∑k ∈ Ki
ξikbikykg e pi " i
ð2:12Þ
Motivating Example 2 (Continued). With the application ofthe robust counterpart formulation 2.12 to the two constraints ofmotivating example 2 and the realization that there is no RHSuncertainty (i.e., pi = 0), their corresponding robust counterpartconstraints become
x1 � 20y1 þ maxðξ31, ξ33Þ ∈ U1
f0:1ξ31x1 þ 2ξ33y1g e 0
x2 � 20y2 þ maxðξ42, ξ44Þ ∈ U2
f0:1ξ42x2 þ 2ξ44y2g e 0
where U1 and U2 are predefined uncertainty sets for (ξ31, ξ33)and (ξ42, ξ44), respectively.The set induced robust counterpart formulations 2.6 and 2.12
depend on the selection of the uncertainty set U. In thesubsequent sections, several different uncertainty sets are studiedfirst and the corresponding robust counterpart optimizationformulations are then derived.
3. UNCERTAINTY SETS
As stated in the previous section, the formulation of robustcounterpart optimization models is connected with the selectionof the uncertainty set. In the sequel, several different uncertaintysets are introduced. For the sake of simplicity, we eliminate theconstraint index i in the random vector ξ.
Definition 3.1 (Box Uncertainty Set). The box uncertaintyset is described using the∞-norm of the uncertain data vector asfollows:
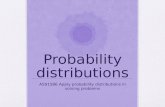
U∞ ¼ fξjjjξjj∞ e Ψg ¼ fξjjξjj e Ψ, " j ∈ Jig ð3:1Þwhere Ψ is the adjustable parameter controlling the size of theuncertainty set.Figure 1 illustrates the box uncertainty set for parameter ~aj
defined by ~aj= aj + ξj~aj, j = 1,2, where ~aj denotes the true value ofthe parameter, aj denotes the nominal value of the parameter, ξjdenotes the uncertainty and ~aj represents a constant perturba-tion. If the uncertain parameters are known to be bounded ingiven intervals~aij∈ [aij�~aij, aij +~aij]"j∈ Ji, then the uncertaintycan be represented by~aij = aij + ξjaij and this results in the intervaluncertainty set, which is a special case of box uncertainty setwhen Ψ = 1 (i.e., U∞ = {ξ ||ξj| e 1,"j ∈ Ji}). Note that in thispaper, we specifically use the “interval uncertainty set” to denotethe box set with Ψ = 1, and use the “box uncertainty set” torepresent a general adjustable bounded set.Definition 3.2 (Ellipsoidal Uncertainty Set). The ellipsoidal
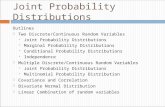
uncertainty set is described using the 2-norm of the uncertaindata vector as shown in Figure 2,
U2 ¼ fξjjjξjj2 e Ωg ¼ ξjffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
ξj2
re Ω
8<:
9=; ð3:2Þ
where Ω is the adjustable parameter controlling the size of theuncertainty set. Note that it is known from geometry that forbounded uncertainty ξj ∈ [�1,1], whenΩg (|Ji|)
1/2 (where |Ji|is the cardinality of the set Ji), the entire uncertain space iscovered by the ellipsoid uncertainty set.Definition 3.3 (polyhedral Uncertainty Set).The polyhedral
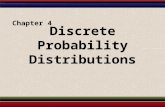
uncertainty set is described using the 1-norm of the uncertaindata vector as shown in Figure 3,
U1 ¼ fξjjjξjj1 e Γg ¼ ξj ∑j ∈ Ji
jξjj e Γ
( )ð3:3Þ
where Γ is the adjustable parameter controlling the size of theuncertainty set. Note that for bounded uncertainty ξj ∈[�1,1],
Figure 1. Illustration of box uncertainty set.
Figure 2. Illustration of ellipsoidal uncertainty set.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10571 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
when Γ g |Ji|, the overall uncertain space is covered by thepolyhedral uncertainty set.The above three uncertainty sets can be further combined to
generate new uncertainty sets. Bounded uncertainty is a type ofimportant uncertainty characteristic which is widely studied inpractice. We will further introduce several uncertainty setswhich are generated by combining the ellipsoid, or polyhedron,or both ellipsoid and polyhedral uncertainty set with the boxuncertainty set.Definition 3.4 (“Box+ellipsoidal” Uncertainty Set). This
type of uncertainty set is the intersection between an ellipsoidand a box defined as follows,
U2 ∩ ∞ ¼ fξj ∑j ∈ Ji
ξ2j e Ω2, jξjj e Ψ, " j ∈ Jig
ð3:4ÞIt is known from geometry that for an adjustable box defined by3.1 and an adjustable ellipsoid defined by 3.2, in order to ensurethat the intersection between them does not reduce to any one ofthem, the parameters should satisfy the following relationship:
Ψ e Ω e ΨffiffiffiffiffiffijJij
pð3:5Þ
Remark 3.1. As Ψ = 1, the above set 3.4 defines the intersec-tion between interval and ellipsoid, which is referred as “interval+ellipsoidal” uncertainty set in this paper. This type of uncertaintyset is important for bounded uncertainty since it makes no senseto construct an uncertainty set exceeding the bounded uncertainspace. For this kind of uncertainty set, whenΩ = 1, the ellipsoid isexactly inscribed by the box; when Ω = (|Ji|)
1/2, the ellipsoid iscircumscribed by the box (i.e., the intersection between the boxand ellipsoid is exactly the box). Figure 4 illustrates the geometryof this uncertainty set for the case that the dimension of theuncertain parameter space is 2 (i.e., |Ji| = 2).Definition 3.5 (“Box+Polyhedral” Uncertainty Set). This
type of uncertainty set is the intersection between the polyhedraland the interval set defined with both 1-norm and infinite normas follows,
U1 ∩ ∞ ¼ fξj ∑j ∈ Ji
jξjj e Γ, jξjj e Ψ, " j ∈ Jig
ð3:6Þ
It is also known from geometry that for an adjustable box definedby 3.1 and an adjustable polyhedron defined by 3.3, the inter-section between them does not reduce to any one of them if theparameters satisfy the following relationship:
Ψ e Γ e ΨjJij ð3:7Þ
Remark 3.2. As Ψ = 1, the above set defines the intersectionbetween the interval and polyhedral set, which is referred as“interval+polyhedral” uncertainty set. For this uncertainty set,when Γ = 1, the polyhedron is exactly inscribed by the box andthe intersection between the polyhedron and the box is exactlythe polyhedron; when Γ = |Ji|, the intersection between thepolyhedron and the box is exactly the box, as shown in Figure 5.Definition 3.6 (“Box+Ellipsoidal+Polyhedral” Uncertainty
Set). This type of uncertainty set is the intersection between theellipsoidal, polyhedral and box set defined as follows:
U1 ∩ 2 ∩ ∞ ¼ fξj ∑j ∈ Ji
jξjj e Γ, ∑j ∈ Ji
ξ2j e Ω2,
jξjj e Ψ, " j ∈ Jig ð3:8ÞFor this type of uncertainty set, the intersection between poly-hedron and ellipsoid is not reduced to any one of them if theadjustable parameters satisfy the following set of conditions:
Ψ e Ω e ΨffiffiffiffiffiffijJij
pð3:9aÞ
Ω e Γ e ΩffiffiffiffiffiffijJij
pð3:9bÞ
where the first equation is used to ensure that there is intersectionbetween the ellipsoid and the box, the second equation is used toensure that there is intersection between the ellipsoid and thepolyhedron as shown in Figure 6.Illustration 3.1. Assume ~a1 = 20 + 2ξ1, ~a2 = 10 + ξ2, ξ1, ξ2 ∈
[� 1, 1], then the corresponding ellipsoidal and polyhedraluncertainty sets for ~a under different values of Ω and Γ can beillustrated as Figure 7 and Figure 8. From the illustration inFigure 7, it can be observed that when Γ =Ω, the polyhedron isinscribed by the ellipsoid. On the other hand, it can be observedfrom Figure 8 that when Γ =Ω(|Ji|)
1/2, the ellipsoid is inscribedby the polyhedron, which verifies the analysis in the previousdefinitions.The different uncertainty sets are summarized in Table 1.
Considering different types of uncertainty characteristics(bounded or unbounded), we also list the suggested range forthe adjustable parameter of different uncertainty sets. Based onthese definitions of the uncertainty sets, the correspondingrobust counterpart optimization formulations for linear optimi-zation problems are derived in the next section.Remark 3.3(1) All the parameter values should be non-negative.Figure 3. Illustration of polyhedral uncertainty set.
Figure 4. Illustration of the “interval+ellipsoidal” uncertainty set.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10572 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
(2) The “interval+ellipsoidal”, “interval+polyhedral”, and“interval+ellipsoidal+polyhedral” uncertainty sets arenot suggested for the unbounded uncertainty distribu-tion since we do not want to restrict the set within agiven interval.
(3) The suggested parameter range for bounded uncer-tainty is based on the following: when the adjustableparameter’s value is equal to the upper bound given inthe table, the bounded uncertain space is entirely cov-ered by the corresponding uncertainty set. Thus, furtherincrease of the value of the parameter could lead to amoreconservative solution and will not improve the solutionrobustness.
(4) The suggested range for unbounded uncertainty isbased on that we want to avoid that the intersectionbetween different uncertainty sets is reduced to any oneof them.
4. ROBUST COUNTERPART FORMULATIONS FOR LIN-EAR OPTIMIZATION PROBLEMS
To attain robust solutions, we look for solutions which arefeasible for any realization of the uncertain data in a predefineduncertainty set. In the following subsections, we present thederivation procedure of the equivalent robust counterpart optimi-zation models based on formulation 2.6. To eliminate the innermaximization problem in the ith constraint of 2.6, we first transformthe inner maximization problem into its conic dual, and thenincorporate the dual problem into the original constraint.
We will first derive the robust counterpart formulation for LHSonly uncertainty of a linear optimization problem, then we willextend it to the RHS only uncertainty, and finally to the case ofLHS and RHS uncertainty appearing simultaneously.4.1. Left Hand Side (LHS) Uncertainty. When only LHS
uncertainty is considered in the ith constraint of 2.1, the
Figure 5. Illustration of combined interval and polyhedral uncertainty set.
Figure 6. Illustration of combined interval, ellipsoidal and polyhedral uncertainty set.
Figure 7. Illustration of the relationship between ellipsoidal and polyhedral uncertainty set (Γ = Ω).
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight

10573 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
corresponding robust counterpart constraint 2.5 for the ithconstraint is reduced to
∑jaijxj þ max
ξ ∈ U∑j ∈ Ji
ξijaijxj
( )" #e bi ð4:1Þ
The robust counterpart is derived for different uncertainty setsintroduced in section 3 as follows.
Property 4.1. If the set U is the box uncertainty set 3.1, then thecorresponding robust counterpart constraint 4.1 is equivalent tothe following constraint:
∑jaijxj þ Ψ ∑
j ∈ Ji
aijjxjj" #
e bi ð4:2Þ
Proof. For the box uncertainty setU∞ = {ξ | |ξj|eΨ,"j∈ Ji},we define P∞ = [IL�L;01�L], p∞ = [0L�1;Ψ] and
Figure 8. Illustration of the relationship between ellipsoidal and polyhedral uncertainty set (Γ = Ω√2).
Table 1. Summary of the Uncertainty Set
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10574 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
K∞ = {[θL�1; t] ∈ RL+1| )θ )∞e t}, where L is the cardinality ofthe uncertainty set (i.e., L = |Ji|). Then the inner maximizationproblem in 4.1 can be rewritten as
maxξf ∑j ∈ Ji
ξijaijxj : P∞ξ þ p∞ ∈ K∞g
Defining dual variable y = [wi; τi] ∈ RL+1 and using the dual coneof K∞: K∞
* = {[θL�1; t] ∈ RL+1| )θ )1e t}, the conic dual of theinner maximization problem can be formulated as
minw, τ
Ψτi : wij ¼ aijxj " j, jjwijj1 e τin o
Since the above problem is a minimization problem, it can befurther rewritten as the following equivalent formulation byreplacing τi with )wi )1 = Σj∈Ji |wii|,
minwfΨ ∑
j ∈ Ji
jwijj : wij ¼ aijxj " jg
Realizing that ~aij g 0, we can reformulate the conic dual of theinner maximization problem as follows:
minwfΨ ∑
j ∈ Ji
jwijj : wij ¼ aijxj " jg ¼ Ψ ∑j ∈ Ji
jaijxjj ¼ Ψ ∑j ∈ Ji
aijjxjj
Replacing the original inner maximization problem with theabove conic dual, then the following constraint is obtained:
∑jaijxj þ ½Ψ ∑
j ∈ Ji
aijjxjj� e bi
Remark 4.1. Constraint 4.2 contains absolute value terms |xj|.If the variable is positive, the absolute value operator can bedirectly removed. Otherwise, it can be further equivalentlytransformed to the following constraints because their corre-sponding feasible sets are identical:
∑jaijxj þΨ ∑
j ∈ Ji
aijuj e bi
jxjj e uj, j ∈ Ji
8><>:
Thus, the absolute value term in 4.2 can be eliminated and thefinal equivalent robust formulation is obtained:
∑jaijxj þΨ ∑
j ∈ Ji
aijuj e bi
�uj e xj e uj
8><>: ð4:3Þ
Remark 4.2. When Ψ = 1 (i.e., the interval uncertainty set),the robust counterpart formulation is reduced to Σjaijxj + Σj∈Ji aij|xj| e bi, which is exactly the robust counterpart formulationproposed by Soyster,4 the so-called “worst case scenario” robustmodel for bounded uncertainty.Motivating Example 1 (Continued). Considering the first
constraint of motivating example 1,
ð10 þ ξ11Þx1 þ ð20 þ 2ξ12Þx2 e 140
and assuming that the uncertainty set related to ξ11,ξ12 is definedby 3.1, the corresponding robust counterpart for this constraint is
10x1 þ 20x2 þ Ψðjx1j þ 2jx2jÞ e 140:
The first robust counterpart constraint with a different value ofΨ is illustrated in Figure 9a. It can be observed that as theparameter value Ψ increases (i.e., the size the uncertainty setincreases), the feasible set of the resulting robust counterpartoptimization problem contracts.Similarly, for the second constraint of the example, the box
uncertainty set induced robust counterpart is
6x1 þ 8x2 þ Ψð0:6jx1j þ 0:8jx2jÞ e 72:
Notice that the robust counterpart formulation is constructedconstraint by constraint and different parameter values can beapplied for different constraints. The complete box uncertaintyset induced robust counterpart formulation of this motivatingexample with different parameters Ψ1 and Ψ2 for the twoconstraints is
max 8x1 þ 12x2s:t: 10x1 þ 20x2 þ Ψ1ðjx1j þ 2jx2jÞ e 140
6x1 þ 8x2 þ Ψ2ð0:6jx1j þ 0:8jx2jÞ e 72x1, x2 g 0
which is equivalent to the following problem since the variablesare positive:
max 8x1 þ 12x2s:t: 10x1 þ 20x2 þ Ψ1ðx1 þ 2x2Þ e 140
6x1 þ 8x2 þ Ψ2ð0:6x1 þ 0:8x2Þ e 72x1, x2 g 0
Property 4.2. If the set U is the ellipsoidal uncertainty set 3.2,then the corresponding robust counterpart constraint 4.1 isequivalent to the following constraint
∑jaijxj þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
a2ijx2j
r24
35 e bi ð4:4Þ
Proof. Consider the ellipsoidal uncertainty set U2 ={ξ|(∑j∈Jiξj
2)1/2 e Ω}, we define P2 = [IL�L; 01�L], I = diag{1,..., 1}, p2 = [0L�1;Ω] andK2 = {[θL�1; t]∈ RL+1| )θ )2e t}, thenthe inner maximization problem in 4.1 can be denoted as
maxξf ∑j ∈ Ji
ξijaijxj : P2ξ þ p2 ∈ K2g
Defining the dual variable y = [zi; τi] ∈ RL+1 and using the dualconeK2
* =K2, the conic dual of the innermaximization problem is
min Ωτi : zi ¼ aix, jjzijj2 e τig�
Since it is a minimization problem, we can make equivalenttransformation of above problem by replacing τi with )zi )2 =(Σj∈Ji zij
2)1/2 and get
minz
Ωffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
z2ijr
: zi ¼ aix
8<:
9=; ¼ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
a2ijx2j
r
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10575 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
After incorporating the above conic dual into the robust counter-part constraint, the following robust counterpart is obtained
∑jaijxj þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
a2ijx2j
r24
35 e bi
Motivating Example 1 (Continued). The corresponding robustconstraint for the first constraint of the motivating example 1 is
10x1 þ 20x2 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffix12 þ 4x22
pe 140
and its robust counterpart constraint with different value of Ω isillustrated in Figure 9b. It can be observed that as the parametervalue Ω increases (i.e., the size the uncertainty set increases), thefeasible set of the resulting robust counterpart optimization problemcontracts.Property 4.3. If the set U is the polyhedral uncertainty set 3.3,
then the corresponding robust counterpart constraint 4.1 isequivalent to the following constraints
∑jaijxj þ Γpi e bi
pi g aijjxjj, "j ∈ Ji
8><>: ð4:5Þ
Figure 9. Illustration of the robust counterpart constraint. (a) Box uncertainty set; (b) ellipsoidal uncertainty set; (c) polyhedral uncertainty set; (d)“interval+ellipsoidal” uncertainty set; (e) “interval+polyhedral” uncertainty set; (f) “interval+ellipsoidal+polyhedral” uncertainty set.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight

10576 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Proof. Consider the polyhedral uncertainty set U1 ={ξ|∑j∈Ji |ξj| e Γ}, define P1 = [IL�L;01�L], p1 = [0L�1;Γ],K1 = {[θL�1; t] ∈ RL+1| )θ )1et}, then the setU1 can be denotedas U1 = {ξ | P1ξ + p1 ∈ K1} and the inner maximization problemin 4.1 can be denoted as
maxξf ∑j ∈ Ji
ξijaijxj : P1ξ þ p1 ∈ K1g
Defining the dual variable y = [zi; τi]∈ RL+1 and based on the factthat the dual cone of K1 is
K�1 ¼ K∞ ¼ f½θL�1; t� ∈ RL þ 1jjjθjj∞ e tgThe conic dual of the inner optimization problem can beformulated as
minz, τ
fΓτi : zi ¼ aix, jjzijj∞ e τig
which can be further rewritten as the following equivalentformulation by replacing τi with )zi )∞ = maxj∈Ji |zi|,
minzfΓmax
j ∈ Jijzijj : zi ¼ aixg ¼ Γmax
j ∈ Jijaijxjj
Since the above problem is a minimization problem, we canintroduce an auxiliary variable pi to replace maxj∈Ji |aijxj| andobtain the following equivalent description:
minzfΓmax
j ∈ Jijzijj : zi¼ aixg
¼ Γpi, pi g aijjxjj, " j ∈ Ji
Incorporating the above conic dual into the robust counterpartconstraint, the following robust counterpart is obtained
∑jaijxj þ Γpi e bi
pi g aijjxjj, "j ∈ Ji
8><>:Remark 4.3. As shown in Remark 4.1, an equivalent robust
formulation for 4.5 can be obtained by replacing the absolutevalue term |xj| with auxiliary variable uj and constraint�uje xjeuj as follows:
∑jaijxj þ Γpi e bi
pi g aiuj, "j ∈ Ji�uj e xj e uj, "j ∈ Ji
8>>><>>>: ð4:6Þ
Motivating Example 1 (Continued). The correspondingrobust counterpart constraint for the first constraint of themotivating example 1 is
10x1 þ 20x2 þ Γp e 140p g jx1j, p g 2jx2j
(
The above robust counterpart for the first constraint withdifferent value of Γ is illustrated in Figure 9c. It can be observedthat as the parameter value Γ increases (i.e., the size theuncertainty set increases), the feasible set of the resulting robustcounterpart optimization problem contracts.
Property 4.4. If the set U is the “box+ellipsoidal” uncertaintyset 3.4, then the corresponding robust counterpart constraint 4.1is equivalent to the following constraint
∑jaijxj þ Ψ ∑
j ∈ Ji
aijjxj � zijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
a2ijz2ij
r24
35 e bi ð4:7Þ
Proof. The “box+ellipsoidal” uncertainty set U2∩∞ ={ξ|∑j∈Jiξj
2 eΩ2, |ξj|eΨ, "j ∈ Ji} can be denoted using conicrepresentation as follows,
U2 ∩ ∞ ¼ fξjP2ξ þ p2 ∈ K2, P∞ξ þ p∞ ∈ K∞gwhere K2 and K∞ have the same definition as in the previousproof. Thus the inner maximization problem of 4.1 becomes
maxξf ∑j ∈ Ji
ξijaijxj : P2ξ þ p2 ∈ K2, P∞ξ þ p∞ ∈ K∞g
Defining the dual variable y1 = [wi, τ1]∈ RL+1, y2 = [zi, τ2]∈ RL+1
and using the dual cone K∞* = K1, K2
* = K2, the conic dual of theinner maximization problem can be formulated as follows:
minfΨτ1 þ Ωτ2 : wi þ zi¼ aix, jjwijj1 e τ1, jjzijj2 e τ2g
After an equivalent transformation through replacing τ1 and τ2with )wi )1 = ∑j∈Ji |wij| and )z )2 = (∑j∈Ji zij
2)1/2, respectively, weget
minz,w
Ψ ∑j ∈ Ji
jwijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
zij2r
: wi þ zi ¼ aix
8<:
9=;
which is further equivalent to
minz
Ψ ∑j ∈ Ji
jaijxj � zijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
zij2r
Since zij are decision variables, we can replace zijwith aijzij and get
an equivalent problem:
minz
Ψ ∑j ∈ Ji
jaijxj � aijzijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2zij2
r
Incorporation of the above conic dual into the robust counterpartconstraint and removal of the minimization operator (it is aequivalent operation since the inner minimization is on the left-hand side of a “less or equal to” constraint) obtains the followingrobust counterpart:
∑jaijxj þ Ψ ∑
j ∈ Ji
aijjxj � zijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
a2ijz2ij
r24
35 e bi
Remark 4.4. As shown in Remark 4.1, an equivalent robustformulation for 4.7 can be obtained by replacing the absolutevalue term |xj � zij| with auxiliary variable uij and constraint�uij e xj � zij e uij as follows:
∑jaijxj þ Ψ ∑
j ∈ Ji
aijuij þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2zij2
re bi
�uij e xj � zij e uij
8><>: ð4:8Þ
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10577 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Remark 4.5.WhenΨ = 1 (i.e., the setU is defined as “interval+ellipsoidal” uncertainty set), the corresponding “interval+ellip-soidal” based robust counterpart optimization formulation takesthe following form:
∑jaijxj þ ∑
j ∈ Ji
aijuij þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2zij2
re bi
�uij e xj � zij e uij
8><>: ð4:9Þ
which is exactly the robust counterpart formulation proposed byBen-Tal and Nemirovski1 (i.e., a special case of the combinedadjustable box and adjustable ellipsoidal based robustcounterpart).Motivating Example 1 (Continued). The “interval+ellipsoi-
dal” based robust constraint for the first constraint of themotivating example 1 is
10x1 þ 20x2 þ u11 þ 2u12 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiz211 þ 4z212
pe 140
�u11 e x1 � z11 e u11, � u12 e x2 � z12 e u12
(
The above constraint can be projected to the space spanned bythe x1, x2 dimensions by fixing x1 at different points andmaximizing the corresponding x2. The constraint can be illu-strated as shown in Figure 9d. Comparing the robust counterpartconstraint illustration Figure 9b and Figure 9d, it can be observedthat forΩ = 1, the two robust counterparts are the same, whereasfor Ω = 2, the “interval+ellipsoidal” based robust counterpart isless conservative because the resulting optimization feasible set islarger. This is consistent with the fact that as Ω e 1, theintersection between interval and ellipsoid is exactly the ellipsoid,but as Ω > 1, the intersection between interval and ellipsoid issmaller than the ellipsoid itself.Property 4.5. If the set U is the “box+polyhedral” uncertainty
set 3.6, then the corresponding robust counterpart constraint 4.1is equivalent to the following constraints
∑jaijxj þ Ψ ∑
j ∈ Ji
wij þ Γzi e bi
zi þ wij g aijjxjj "j ∈ Jizi g 0,wij g 0
8>>><>>>: ð4:10Þ
Proof. The “box+polyhedral” uncertainty set U1∩∞ ={ξ|∑j∈Ji |ξj| e Γ, |ξj| e Ψ, "j ∈ Ji} can be denoted as followsusing conic representation:
U1 ∩ ∞ ¼ fξjP1ξ þ p1 ∈ K1, P∞ξ þ p∞ ∈ K∞gDefining the dual variable y1 = [wi,τ1]∈RL�1, y2 = [vi, τ2]∈ RL�1
and using the dual cone K1* = K∞, K∞
* = K1, the inner maximiza-tion problem is rewritten as
maxξ
∑j ∈ Ji
ξijaijxj : P1ξ þ p1 ∈ K1, P∞ξ þ p∞ ∈ K∞
( )
The conic dual of the above problem can be formulated asfollows
minfΨτ1 þ Γτ2 : wi þ vi ¼ aix, jjwijj1 e τ1, jjvijj∞ e τ2gWe can further get the following equivalent transforma-tion through replacing τ1 and τ2 with )w ) = ∑j∈Ji |wij| and
)ν )∞ = maxj∈Ji |νij|, respectively,
minw, z
fΨ ∑j ∈ Ji
jwijj þ Γmaxj ∈ Ji
jvijj : wi þ vi ¼ aixg
Since the above problem is a minimization problem, it can beequivalently transformed to the following problem:
minw, z
fΨ ∑j ∈ Ji
jwijj þ Γzi : zi g jaijxj � wijj, " j ∈ Jig
The above problem is further equivalent to the followingproblem since it is a minimization problem and optimal solutionmust be obtained with |wij| e |aijxj|
minw, z
fΨ ∑j ∈ Ji
jwijj þ Γzi : zi g jaijxjj � jwijj, " j ∈ Ji, zi g 0g
which is further equivalent to the following problem by replacing|wij| with wij and wij g 0
minw, z
fΨ ∑j ∈ Ji
wij þ Γzi : zi g aijjxjj � wij, " j ∈ Ji,wij g 0, zi g 0g
After incorporation the above conic dual into the robustcounterpart constraint, the following robust counterpart isobtained
∑jaijxj þ Ψ ∑
j ∈ Ji
wij þ Γzi e bi
zi þ wij g aijjxjj "j ∈ Jizi g 0,wij g 0
8>>><>>>:Remark 4.6. As pointed out in Remark 4.1, an equivalent
robust formulation for 4.10 can be obtained by replacing the term|xj| with auxiliary variable uj and constraint �uj e xj e uj asfollows:
∑jaijxj þ Ψ ∑
j ∈ Ji
wij þ Γzi e bi
zi þ wij g aijuj, "j ∈ Ji�uj e xj e uj, "j ∈ Jizi g 0,wij g 0
8>>>>><>>>>>:
ð4:11Þ
Remark 4.7. When Ψ = 1 (i.e., the set U is defined as the“interval+polyhedral” uncertainty set), the corresponding robustcounterpart optimization formulation becomes
∑jaijxj þ ∑
j ∈ Ji
wij þ Γzi e bi
zi þ wij g aijuj, " j ∈ Ji�uj e xj e uj, " j ∈ Jizi g 0,wij g 0
8>>>>><>>>>>:
ð4:12Þ
which is exactly the robust counterpart proposed by Bertsimasand Sim.16
Motivating Example 1 (Continued). The corresponding“interval+polyhedral” based robust counterpart for the firstconstraint of the motivating example 1 is
10x1 þ 20x2 þ w1 þ w2 þ Γz e 140z þ w1 g jx1j, z þ w2 g 2jx2jz,w1,w2 g 0
8>><>>:
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10578 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Figure 9e illustrates the projection of the above constraints to thex1, x2 dimensions. Comparing the robust counterpart constraintillustration Figure 9c and Figure 9e, it can be observed that forΓ = 1, the robust counterpart constraint is the same, whereas forΓ = 3, the “interval+polyhedral” based robust counterpart is lessconservative. This is consistent with the fact that as Γ e 1, theintersection between interval and polyhedron is exactly thepolyhedron, but as Γ > 1, the intersection between interval andpolyhedron is smaller than the polyhedron itself.Property 4.6. If the set U is the “interval+ellipsoidal+
polyhedral” uncertainty set 3.8, then the corresponding robustcounterpart constraint 4.1 is equivalent to the following con-straints
∑jaijxj þ ∑
j ∈ Ji
jpijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γzi
24
35 e bi
zi g jaijxj � pij � wijj "j ∈ Ji
8>>><>>>:
ð4:13Þ
Proof. Consider the “interval+ellipsoidal+polyhedral” uncer-tainty set
U1 ∩ 2 ∩ ∞ ¼ fξj ∑j ∈ Ji
jξjj e Γ, ∑j ∈ Ji
ξ2j e Ω2, jξjj e 1, " j ∈ Jig
It can be denoted using conic representation as follows,
U1 ∩ 2 ∩ ∞ ¼ fξjP1ξ þ p1 ∈ K1, P2ξ þ p2 ∈ K2, P∞ξþ p∞ ∈ K∞g
Defining the dual variable y1 = [pi, τ1], y2 = [wi,τ2], y
3 = [vi,τ3]and using the dual cone K1
* = K∞, K2* = K2, K∞
* = K1, the innermaximization problem can be written as
maxξf ∑j ∈ Ji
ξijaijxj
: P1ξ þ p1 ∈ K1, P2ξ þ p2 ∈ K2, P∞ξ þ p∞ ∈ K∞g
The conic dual of the above problem can be formulated asfollows
minfτ1 þ Ωτ2 þ Γτ3 : pi þ wi þ vi¼ aix, jjpijj1 e τ1, jjwijj2 e τ2, jjvijj∞ e τ3g
After equivalent transformation through replacing τ1, τ2, τ3 with
)pi )1, )wi )2, )νi )∞ respectively, we get
minp,w, v
∑j ∈ Ji
jpijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γmax
j ∈ Jijvijj : pi þ wi þ vi
8<:¼ aixg
Replacing maxj∈Ji |νij| with the auxiliary variable zi, we get
minp,w, z
∑j ∈ Ji
jpijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γzi : zi g
8<:
jaixij � pij � wijj, " j ∈ Ji�
Incorporate the above conic dual and removing the mini-mization operator. The following robust counterpart is thenobtained
∑jaijxj þ ∑
j ∈ Ji
jpijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γzi
24
35 e bi
zi g jaijxj � pij � wijj " j ∈ Ji
8>>><>>>:
Remark 4.8. An equivalent robust formulation for 4.13 can beobtained by replacing the term |pij| with auxiliary variable vij andconstraint �vij e pij e vij, replacing |aijxj � pij � wij| withauxiliary variable uij and constraint�uije aij xj� pij�wije uij asfollows:
∑jaijxj þ ∑
j ∈ Ji
vij þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γzi e bi
�vij e pij e vij, "j ∈ Ji�zi e aijxj � pij � wij e zi, "j ∈ Ji
8>>>><>>>>:
ð4:14Þ
Motivating Example 1 (Continued). The corresponding“interval+ellipsoidal+polyhedral” uncertainty set induced robustconstraint for the first constraint of the motivating example 1 is:
10x1 þ 20x2 þ jp1j þ jp2j þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiw1
2 þ w22
p þ Γz e 140z g jx1 � p1 � w1j, z g j2x2 � p2 � w2j
(
The above constraints are also plotted on the x1, x2 dimensions asshown in Figure 9f. Comparing the robust counterpart constraintillustration Figure 9d and Figure 9f, it can be seen that for bothΩ = 1 and Ω = 2, the “interval+ellipsoidal” set induced robustcounterpart is more conservative than the combined interval,ellipsoidal and polyhedral set induced model because the result-ing optimization feasible set is in general larger. This is consistentwith the fact that when we further incorporate the polyhedral set
Table 2. Robust Counterpart Formulation for the ith LinearConstraint with LHS Uncertainty
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10579 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
to construct the uncertainty set, the size of the resulting un-certainty set is actually decreased.Finally, as a summary to the above derivation, we list the
robust counterpart formulations for linear optimization pro-blems with LHS uncertainty as shown in Table 2. Note that inTable 2, we list the “interval+ellipsoidal” based robust counter-part formulation but not “box+ellipsoidal” based model byrealizing that the “interval+ellipsoidal” set is important for thebounded uncertainty distribution. Similarly, the “interval+poly-hedral” and “interval+ellipsoidal+polyhedral” set induced robustcounterpart optimization formulations are listed in the table.Remark 4.9. For the sake of simplicity, only robust formula-
tions with absolute value terms are listed in Table 2, andequivalent robust formulations after eliminating the absolutevalue terms can be found via eqs 4.3, 4.6, 4.9, 4.12, and 4.14. Inthe rest part of the paper, the absolute value term in the otherrobust counterpart formulations can be eliminated in asimilar way.4.2. Right Hand Side (RHS) Uncertainty. Consider the case
that only RHS uncertainty exists in the ith constraint of 2.1 asfollows
∑jaijxj e ~bi ð4:15Þ
where ~b = bi + ξibi and ξi is the random variable. Then the robustcounterpart for the ith constraint 2.5 is reduced to
∑jaijxj þ ½max
ξ ∈ Uf�ξibg� e bi ð4:16Þ
Property 4.7. For RHS only uncertainty of the ith constraint4.15, the uncertainty set induced robust counterpart constraint4.16 is equivalent to the following constraint
∑jaijxj þ Δbi e bi ð4:17Þ
whereΔ is defined asΨ,Ω, Γ, min(Ω,1), min(Γ,1), min(Ω, Γ, 1)for the box, ellipsoidal, polyhedral, “interval+ellipsoidal”, “inter-val+polyhedral”, and “interval+polyhedral+ellipsoidal” uncer-tainty sets, respectively.Proof. Since the dimension of the uncertain space for RHS
only uncertainty is 1 (i.e., |Ji| = 1), all the previously discusseddifferent uncertainty sets are reduced to 1-dimensional intervalsets which can be described as
U ¼ fξijjξij e Δg ð4:18ÞwhereΔ is defined asΨ,Ω,Γ, min(Ω,1), min(Γ,1), min(Ω,Γ,1)for the box, ellipsoidal, polyhedral, “interval+ellipsoidal”, “inter-val+polyhedral”, and “interval+polyhedral+ellipsoidal” uncer-tainty sets, respectively.
Incorporating auxiliary variables x0 and a constraint x0 =� 1,the constraint 4.16 can be rewritten as
∑jaijxj þ ½max
ξ ∈ Ufξibx0g� e bi
With the above reformulation and following the derivationprocess for box uncertainty set of LHS uncertainty, the corre-sponding robust counterpart formulation is obtained
∑jaijxj þ Δbijx0j e bi
Notice that x0 = �1, so the above constraint is reduced to
∑jaijxj þ Δbi e bi
which is the robust counterpart for RHS only uncertainty forlinear optimization problem.Finally, the robust counterpart formulations for different
uncertainty sets are summarized in Table 3. From this analysis,it is observed that for RHS only uncertainty of a linear constraint,there is no difference in defining different uncertainty sets sinceall of them reduce to a simple interval.4.3. Simultaneous LHS and RHS Uncertainty. Let us con-
sider the more general case where uncertainty appears on boththe LHS and the RHS of the ith constraint:
∑j ˇ Ji
aijxj þ ∑j ∈ Ji
~aijxj e ~bi ð4:19Þ
Similarly, through incorporating auxiliary variable x0 and aconstraint x0 = �1, moving the RHS to the LHS, the aboveconstraint can be rewritten as
∑j ˇ Ji
aijxj þ ∑j ∈ Ji
~aijxj þ ~bix0 e 0 ð4:20Þ
Thus, the robust counterpart formulations for simultaneous LHSand RHS uncertainty can be derived using the same procedureas shown in section 4.1, and they are summarized in Table 4.For a detailed derivation procedure, the reader is directed toAppendix A.
Table 4. Robust Counterpart Formulation for the ith LinearConstraint with LHS and RHS Uncertainty
Table 3. Robust Counterpart for the ith Linear Constraintwith RHS Uncertainty
uncertainty set robust counterpart formulation
box ∑jaijxj þ Ψi e bi
ellipsoidal ∑jaijxj þ Ωi e bi
polyhedral ∑jaijxj þ Γi e bi
interval+ellipsoidal ∑jaijxj þ minðΩ, 1Þi e bi
interval+polyhedral ∑jaijxj þ minðΓ, 1Þi e bi
interval+ellipsoidal+polyhedral ∑jaijxj þ minðΩ,Γ, 1Þi e bi
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10580 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Remark 4.10. The objective max cx can be equivalentlytransformed as follows:
max z
s:t: z� cx e 0ð4:21Þ
Thus, the uncertainty in the objective coefficient~c can be treatedas uncertainty in the following type of constraints
z�~cx e 0 ð4:22Þ
Hence, the complete robust counterpart formulations for un-certainty in LHS, RHS, and objective function are obtained.
5. COMPUTATIONAL STUDIES FOR ROBUST LINEAROPTIMIZATION
Example 5.1. Consider the following linear optimizationproblem
max c1x1 þ c2x2
s:t: a11x1 þ a12x2 e b1
a21x1 þ a22x2 e b2
x1, x2 g 0
where
c1 c 2
h i¼ 8 12
� �,
a11 a12
a21 a22
24
35 ¼
10 20
6 8
24
35, b1
b2
24
35 ¼
140
72
24
35
The uncertain version of the this LP problem can be described asthe following problem:
max ~c1x1 þ ~c2x2
s:t: ~a11x1 þ ~a12x2 e ~b1
~a21x1 þ ~a22x2 e ~b2
x1, x2 g 0
where the possible uncertainty is related to the left-hand side(LHS) constraint coefficients ~a11, ~a12, ~a21, ~a22, the right-handside (RHS) parameter ~b1, ~b2 and the objective (OBJ) coefficients~c1, ~c2. Here we define the uncertainty as follows:
~cj ¼ cj þ cjξi0, j ¼ 1, 2
~aij ¼ aij þ aijξij, i ¼ 1, 2, j ¼ 1, 2
~bi ¼ bi þ biξi, i ¼ 1, 2
where aij = 0.1aij, bi = 0.1bi, cj = 0.1cj represent constantperturbation around their nominal values and ξ10, ξ20, ξ11, ξ12,ξ21, ξ22, ξ1, ξ2 are independent random variables.When we only consider the LHS uncertainty, the different
uncertainty set induced robust counterparts can be formulated as
shown in section 4.1. For example, the ellipsoidal uncertainty setbased robust counterpart is
max 8x1 þ 12x2s:t: 10x1 þ 20x2 þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffix12 þ 4x22
pe 140
6x1 þ 8x2 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:36x12 þ 0:64x22
pe 72
x1, x2 g 0
Note that the same uncertainty set parameter valueΩ is appliedfor both constraints here. In the sequel, this will be similarlyapplied for the rest cases without further explanation. Thesolution of the different uncertainty set induced robust counter-parts is shown in Figure 10a. Figure 10b illustrates the relation-ship among the “interval+ellipsoidal”, “interval+polyhedral”, and“interval+ellipsoidal+polyhedral” models (based on LHS+RHSuncertainty for both constraints).Considering only the RHS uncertainty, the different uncer-
tainty set induced robust counterparts can be formulated asshown in section 4.2. For example, the ellipsoidal uncertainty setbased robust counterpart is as follows and the solution of thedifferent robust counterparts are shown in Figure 11.
max 8x1 þ 12x2s:t: 10x1 þ 20x2 þ 14Ω e 140
6x1 þ 8x2 þ 7:2Ω e 72x1, x2 g 0
Considering LHS and RHS uncertainty simultaneously, theellipsoidal uncertainty set based robust counterpart is as followsand the solution is shown in Figure 12.
max 8x1 þ 12x2s:t: 10x1 þ 20x2 þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffix21 þ 4x22 þ 196
pe 140
6x1 þ 8x2 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:36x21 þ 0:64x22 þ 51:84
pe 72
x1, x2 g 0
Considering LHS, RHS, and OBJ uncertainty simulta-neously, we first equivalently transform the objective un-certainty into constraint uncertainty as eq 4.22 and then thedifferent uncertainty set induced robust counterparts can bederived based on the simultaneous LHS and RHS uncer-tainty. For example, the ellipsoidal uncertainty set basedrobust counterpart is as follows and the solution forsimultaneous LHS, RHS, and OBJ uncertainty is shown inFigure 13.
max zs:t: z� 8x1 � 12x2 þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:64x12 þ 1:44x22
pe 0
10x1 þ 20x2 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffix12 þ 4x22 þ 196
pe 140
6x1 þ 8x2 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:36x12 þ 0:64x22 þ 51:84
pe 72
x1, x2 g 0
Based on the solution of the different cases of uncertainties,the following remarks can be made:(1) It can be observed from Figures 10a, 12a, and 13a that for
the ellipsoidal set based robust counterpart, whenΩe 1,the ellipsoidal and “interval+ellipsoidal” has the samesolution because the corresponding uncertainty sets arethe same; when Ω g (|Ji|)
1/2, the “interval+ellipsoidal”solution reaches the worst case and does not decreaseanymore because the “interval+ellipsoidal” uncertainty
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight

10581 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
set is exactly the interval and does not change. For thepolyhedral set induced robust counterpart, when Γ e 1,the polyhedral and “interval +polyhedral” set inducedmodels have the same solution; when Γ g |Ji|, the“interval+polyhedral” solution reaches the worst caseand does not decrease anymore. It can be concludedfrom those results that for bounded uncertainty, theuncertainty set should be combined with the interval toavoid conservative solutions.
(2) Comparing the “interval+ellipsoidal” and the “interval+polyhedral” set based model from Figures 10a, 12a,and 13a, when Γ =Ω(|Ji|)
1/2, the “interval+polyhedral”set based solution is always worse than the “interval+ellipsoidal” based solution, which is verified by the
fact that the “interval+polyhedral” uncertainty set islarger and completely covers the “interval+ellipsoidal”set; when Γ = Ω, the “interval+polyhedral” set basedsolution is always better than the “interval+ellipsoidal”based solution because the “interval+polyhedral” un-certainty set is smaller and completely covered by the“interval+ellipsoidal” set.
(3) Comparing the “interval+ellipsoidal+polyhedral” setbased model with others from Figures 10b, 12b, and13b, for every Ω value, we adjust the value of Γ betweenΩ and Ω(|Ji|)
1/2 and test three different values of Γ (asexplained in section 3, only whenΩeΓeΩ(|Ji|)
1/2, theintersection between the ellipsoidal and polyhedral setdoes not reduce to any one of them). It can be observed
Figure 10. Only LHS uncertainty for both constraints (|Ji| = 2).
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10582 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
that as the value of Γ increases from Ω to Ω(|Ji|)1/2, the
“interval+ellipsoidal+polyhedral” set based solutionswitches from the “interval+polyhedral” set based solu-tion with Γ = Ω to the “interval+ellipsoidal” basedsolution with Γ = Ω(|Ji|)
1/2, because the intersectionbetween the ellipsoid and polyhedron is exactly changingfrom the polyhedron with Γ = Ω to the ellipsoid withparameter Γ = Ω(|Ji|)
1/2.(4) For RHS only uncertainty, which is a special case where
the number of uncertain parameters for every constraint is1, the solution is identical for ellipsoidal and polyhedral
set induced models, and also for the “interval+ellipsoidal”and “interval+polyhedral” uncertainty sets as shown inFigure 11. Furthermore, as Ω e 1 and Γ e 1, all thesolutions are identical. This is consistent with the defini-tion of the corresponding uncertainty set: asΩ = Γ e 1;the four types of uncertainty sets are actually the sameinterval set.
Example 5.2 Refinery Production Planning Problem. Pet-roleum refinery production planning involves several types ofuncertainty, such as prices and product demands. The refinerytopology shown in Figure 14 and the operational planning model
Figure 11. Only RHS uncertainty for both constraints (|Ji| = 1).
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10583 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
originally proposed by Alen35 are used. Leiras et al.36 illustratedthe application of robust optimization framework which is basedon the “interval+polyhedral” uncertainty set induced robustoptimization methodology proposed by Bertsimas and Sim.16
In this example, the refinery includes three units: primarydistillation unit (PDU), cracking, and blending. It processescrude oil (x1) to produce gasoline (x2), naphtha (x3), jet fuel(x4), heating oil (x5), and fuel oil (x6), where x7� x20 areintermediary streams. The objective function maximizes theprofit, which considers the crude oil cost and operating costof the distillation and cracker units. Constraints include the
production yield, fixed proportion blending, production bal-ances, and production requirements. The deterministic modeland the definitions of variables and parameters are shown asfollows.
max ∑t ∈ T
∑j ∈ Jprod
pjtxjt � ∑t ∈ T
∑j ∈ Jfeed
cjtxjt ð5:1aÞ
s.t.
xjt e capjt " j ∈ Jfeed, t ∈ T ð5:1bÞ
Figure 12. Simultaneous LHS and RHS uncertainty for both constraints (|Ji| = 3).
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10584 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
xjt e ∑iηijxit " i ∈ I, t ∈ T ð5:1cÞ
xit e ∑jσijxjt " i ∈ I, t ∈ T ð5:1dÞ
xit e ∑jRijxjt " i ∈ I, t ∈ T ð5:1eÞ
xjt e prodjt " i ∈ I, t ∈ T ð5:1fÞ
xit g 0 " i ∈ I, t ∈ T ð5:1gÞ
where eq 5.1a represents the profit objective, eq 5.1b is plantcapacity constraint, eq 5.1c is production yield constraint,eq 5.1d is fixed proportion blending constraints, eq 5.1e isproduction balance constraint, and eq 5.1f is the productiondemand constraint.The uncertain parameters we focus on are the cost cjt, the
prices of products pjt, the yields ηij, and the demands prodjt. Weassume that those parameters are subject to bounded uncertaintyand that there exists a maximum of 10% deviation of cost and
Figure 13. Simultaneous LHS, RHS and OBJ uncertainty (|Ji| = 3).
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight

10585 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
price coefficients, 5% of demand coefficient, and 1% of yieldcoefficient from their nominal values. It is also assumed that onlythe yields of products from the distillation unit are controlled.The cost cjt and the prices of products pjt appear in the sameconstraint and they are considered simultaneously. We appliedthe six different robust counterpart formulations for the threekinds of uncertainty separately, and all of them together subse-quently. The solution of the nominal deterministic model is US$23,387.50/day. Considering the different types of uncertaintyseparately, the worst cases scenario results computed from boxset induced robust counterpart optimization model with Ψ = 1are listed in Table 5. From these results it can be observed thatthe cost and price uncertainty has the most significanteffect on the overall profit since the objective value is muchless than the objective value of pure yield uncertainty or puredemand uncertainty. In the sequel, we first analyze the differenttypes of uncertainty separately, and then consider themsimultaneously.(1) Yield uncertainty. The set of yield constraints 5.1c
contain the uncertain parameters. In each constraint,the number of the uncertain parameters (i.e., |Ji|) is 1.It belongs to the LHS case uncertainty. Applying thesix different kinds of robust optimization formula-tions, the results are shown in Figure 15. It can beobserved that the results of different formulations arethe same, as the adjustable parameter is less than 1because there is only 1 uncertain parameter in eachindividual constraint. WhenΨ,Ω, Γ = 0, the solutionsare the same as in the deterministic model. WhenΨ =1,Ω = (|Ji|)
1/2, and Γ = |Ji|, the results reach the worstcase. When Ω > (|Ji|)
1/2 and Γ > |Ji|, the results of“interval+ellipsoidal”, “interval+polyhedral” and “in-terval+ellipsoidal+polyhedral” set induced models donot decrease anymore.
(2) Cost and price uncertainty. Since the uncertain para-meters appear in the objective, we convert it into aconstraint. The resulting problem has only LHS uncer-tainty, and the number of the uncertain parameters
(i.e., |Ji|) is 7. The results are shown in Figure 16. WhenΨ, Ω, Γ = 0, the solutions are the same as in thedeterministic model. WhenΨ,Ω, Γ increase, the resultsof the box, ellipsoidal, and polyhedral uncertainty setinduced models will decrease or even become infeasi-ble. If the uncertainty set is combined with an “interval”set, the solution will finally reach the worst case valueand will not decrease anymore. In this study, thefollowing parameters are applied: for “interval+ellip-soidal” model, Ω = (|Ji|)
1/2 = (7)1/2; for “interval+polyhedral” set induced model, Γ = |Ji| = 7; for“interval+ellipsoidal+polyhedral” set induced model,we take Ω = Γ/(|Ji|)
1/2.(3) Demand uncertainty. This belongs to the RHS uncer-
tainty case and there is only one uncertain parameter ineach constraint. The results are shown in Figure 17.From this figure, we can see that the results of differentformulations are the same because there is only oneuncertain parameter in each individual constraint. WhenΨ, Ω, Γ = 0, the solutions are the same as in thedeterministic model. When Ψ, Ω, Γ = 1, the resultsreach the worst case solution. When Ω > (|Ji|)
1/2 = 1,and Γ > |Ji| = 1, the results of the “interval+ellipsoidal”,“interval+polyhedral” and interval+ellipsoidal+polyhe-dral” induced models do not decrease anymore.
(4) Simultaneous yield, price, cost, and demand uncer-tainty. Here we consider all uncertainties together.The x axis is Γprice and we set Γyield = Γdemand =
1/7Γprice
to plot the result using the same axis. The parameters are
Figure 14. Refinery flowchart.
Table 5. Objective Function Values for the Worst-CaseScenario Case
uncertain
parameter yield demand
cost
and price
cost, price,
yield, and demand
objective value 22665.00 23134.97 7113.92 6569.14
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight
babazadeh
Highlight

10586 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
as follows:
Jyield ¼ 1, Jprice ¼ 7, Jdemand ¼ 1
Ψyield ¼ Γyield=jJyieldj,Ψprice ¼ Γprice=jJpricej,
Ψdemand ¼ Γdemand=jJdemandj
Ωyield ¼ Γyield=ffiffiffiffiffiffiffiffiffiffiffijJyieldj
q,
Ωprice ¼ Γprice=ffiffiffiffiffiffiffiffiffiffiffijJpricej
q,
Ωdemand ¼ Γdemand=ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffijJdemandj
pThe results are shown as Figure 18. From this figure wecan observe that when all the Ψ, Ω, Γ for yield, price,cost, and demand are 0, the results are equal to those ofthe deterministic model. When Γprice = 7, Γyield =Γdemand = 1, and Ω = (|Ji|)
1/2, the results of the“interval+ellipsoidal”, “interval+polyhedral”, and “inter-val+ellipsoidal+polyhedral” set induced models reachthe worst case and do not decrease anymore. At the samepoint, the “box” reaches the worst case also.
Finally, from this analysis, it can be concluded that forbounded uncertainty in the yield, demand, and price/cost data,the uncertainty set should be combined with the interval set so asto avoid too conservative or even infeasible solutions. On theother hand, all the different models have the flexibility to adjustthe solution between the worst-case scenario and the determi-nistic solution, depending on the selection of the adjustableparameters for their corresponding uncertainty set. To perform amore rigorous comparison of the different models’ conservatism,the evaluation of the probabilistic guarantees of constraintviolation is necessary, and this will be the subject of a forth-coming publication.
6. ROBUST COUNTERPART FORMULATIONS FORMIXED INTEGER LINEAR OPTIMIZATION PROBLEMS
In this section, different uncertainty set induced robustcounterpart formulations are derived for a general mixed integerlinear constraint. We first present the results for simultaneousconstraint LHS and RHS uncertainty, and then extend the resultsto the case of objective function coefficients’ uncertainty.6.1. Uncertainty in LHS and RHS. For problem 2.7, introdu-
cing auxiliary variable x0 and an additional constraint x0 =�1, theoriginal ith constraint’s robust counterpart eq 2.11 can berewritten as
pix0 þ ∑maimxm þ ∑
kbikyk
þ maxξ ∈ U
fξi0pix0 þ ∑m ∈ Mi
ξimaimxm þ ∑k ∈ Ki
ξikbikykg e 0
ð6:1ÞWith the following definition
ξi ¼ ½ξi0; fξimg; fξikg� ð6:2aÞ
Ai ¼ ½pi, faimg, fbikg� ð6:2bÞ
Ai ¼ ½pi, faimg, fbikg� ð6:2cÞ
X ¼ ½x0; fxmg; fykg� ð6:2dÞ
j ∈ Ji ¼ f0g ∪ Mi ∪ Ki ð6:2eÞthe robust counterpart 6.1 can be rewritten as
∑jAijXj þ max
ξi ∈ Uf ∑j ∈ Ji
ξijAijXjg e 0 ð6:3Þ
To eliminate the inner maximization problem in 6.3, we first
Figure 15. Solution for yield uncertainty.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.
babazadeh
Highlight

10587 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
transform the inner maximization problem into its conic dual,and then incorporate the dual problem into the original con-straint. In the sequel, the robust counterpart formulations for theith mixed integer linear constraint in 2.7 with simultaneous LHSand RHS uncertainty will be directly given. Detailed proofs of allproperties can be found in Appendix B.Property 6.1. If the setU is the box uncertainty set 3.1, then the
corresponding robust counterpart constraint 6.3 becomes
∑maimxm þ ∑
kbikyk þ Ψ½ ∑
m ∈ Mi
aimjxmj
þ ∑k ∈ Ki
bikjykj þ pi� e pi ð6:4Þ
The proof is shown in Appendix B.
Remark 6.1. Notice that the absolute value operators inconstraint 6.4 can be directly removed while the correspondingvariable is positive. The robust formulation can be furtherequivalently transformed to the following constraints:
∑maimxm þ ∑
kbikyk þ Ψ½ ∑
m ∈ Mi
aimum þ ∑k ∈ Ki
bikvk þ pi� e pi
jxmj e um "m ∈ Mi
jykj e vk " k ∈ Ki
8>>><>>>:
ð6:5Þ
This constraint set can be further rewritten as the followingform:
∑maimxm þ ∑
kbikyk þ Ψ½ ∑
m ∈ Mi
aimum þ ∑k ∈ Ki
bikvk þ pi� e pi
�um e xm e um " m ∈ Mi
�vk e yk e vk " k ∈ Ki
8>>><>>>:
ð6.6Þ
Motivating Example 2 (Continued). The robust counterpartfor the original third constraint is as follows:
x1 � 20y1 þ Ψð0:1x1 þ 2y1Þ e 0
The final complete robust counterpart optimization model is
max 3x1 þ 2x2 � 10y1 � 5y2s:t: x1 þ x2 e 20
x1 þ 2x2 e 12x1 � 20y1 þ Ψ1ð0:1x1 þ 2y1Þ e 0x2 � 20y2 þ Ψ2ð0:1x2 þ 2y2Þ e 0x1 � x2 e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g
In the above formulation, different parameters Ψ1, Ψ2 areassigned to the two constraints. Note that the absolutevalue operator has been eliminated since the variables are allpositive.Property 6.2. If the set U is the ellipsoidal uncertainty set
3.2, then the corresponding robust counterpart constraint 6.3becomes
∑maimxm þ ∑
mbikyk
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2xm2 þ ∑
k ∈ Ki
bik2yk2 þ pi
2
se pi
ð6:7ÞThe proof is shown in Appendix B).
Motivating Example 2 (Continued). The robust counterpartconstraint for the third constraint of motivating example 2 is
x1 � 20y1 þ Ω1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:01x12 þ 4y12
pe 0:
Figure 16. Solution for price and cost uncertainty.
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10588 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Property 6.3. If the set U is defined as the polyhedraluncertainty set 3.3, then the corresponding robust counterpartconstraint 6.3 becomes
∑maimxm þ ∑
kbikyk þ ziΓ e pi
zi g aimjxmj " m ∈ Mi
zi g bikjykj " k ∈ Ki
zi g pi
8>>>>><>>>>>:
ð6:8Þ
The proof is shown in Appendix B.. Remark 6.2. Similarly, as in Remark 6.1, the above robustformulation can be further transformed into the followingequivalent constraint set after eliminating the absolute valueoperators:
∑maimxm þ ∑
kbikyk þ ziΓ e pi
zi g aimum " m ∈ Mi
zi g bikvk " k ∈ Ki
zi g pi�um e xm e um " m ∈ Mi
�vk e yk e vk " k ∈ Ki
8>>>>>>>>>><>>>>>>>>>>:
ð6:9Þ
Motivating Example 2 (Continued). The correspondingrobust formulation for the third constraint of the motivatingexample is
x1 � 20y1 þ z1Γ1 e 0z1 g 0:1x1, z1 g 2y1
Property 6.4. If the set U is the “interval+ellipsoidal” uncer-tainty set 3.4 with Ψ = 1, then the corresponding robust
counterpart constraint 6.3 becomes
∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
aimjxm � zimj
þ ∑m ∈ Ki
bikjyk � zikj þ pij1 þ zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2zim2 þ ∑
k ∈ Ki
bik2zik2 þ pi
2zi02s
e pi
ð6:10ÞThe proof is shown in Appendix B.
Remark 6.3. Constraint 6.10 can be rewritten as
∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
aimuim þ ∑m ∈ Ki
bikuik
þ piui0 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2zim2 þ ∑
k ∈ Ki
bik2zik2 þ pi
2zi02r
e pi
uim ¼ jxm � zimj " m ∈ Mi
uik ¼ jyk � zikj " k ∈ Ki
ui0 ¼ j1 þ zi0j
8>>>>>>>>>><>>>>>>>>>>:
which can be further equivalently transformed to the followingconstraint sets as shown in Remark 6.1:
∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
aimuim þ ∑m ∈ Ki
bikuik
þ piui0 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2zim2 þ ∑
k ∈ Ki
bik2zik2 þ pi
2zi02r
e pi
�uim e xm � zim e uim " m ∈ Mi
�uik e yk � zik e uik " k ∈ Ki
�ui0 e 1 þ zi0 e ui0
8>>>>>>>>>><>>>>>>>>>>:
ð6.11Þ
Figure 17. Solution for demand uncertainty.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10589 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Motivating Example 2 (Continued). The robust counterpartformulation for the third constraint is
x1 � 20y1 þ Ω1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:01z231 þ 4z233
pe 0
�u31 e x1 � z31 e u31�u33 e y1 � z33 e u33
Property 6.5. If the setU is defined as the “interval+polyhedral”uncertainty set 3.6 with Ψ = 1, then the corresponding robustcounterpart constraint 6.3 is equivalent to the following con-straint sets:
∑maimxm þ ∑
kbikyk þ ½ziΓi þ ∑
m ∈ Mi
wim þ ∑k ∈ Ki
wik þ wi0� e pi
zi þ wim g aimjxmj " m ∈ Mi
zi þ wik g bikjykj " k ∈ Ki
zi þ wi0 g pi
8>>>>>><>>>>>>:
ð6:12ÞThe proof is shown in Appendix B.Remark 6.4. While the variables are positive, the absolute
value operator can be directly removed. Otherwise, the robustformulation (6.12) can be rewritten as follows as shown inRemark 6.1:
∑maimxm þ ∑
kbikyk þ ½ziΓi þ ∑
m ∈ Mi
wim þ ∑k ∈ Ki
wik þ wi0� e pi
zi þ wim g aimum " m ∈ Mi
zi þ wik g bikvk " k ∈ Ki
zi þ wi0 g pi�um e xm e um " m ∈ Mi
�vk e yk e vk " k ∈ Ki
8>>>>>>>>>><>>>>>>>>>>:
ð6.13Þ
Motivating Example 2 (Continued). Since all variables arepositive, the robust counterpart for the third constraint becomes
x1 � 20y1 þ z1Γ1 þ w31 þ w33 e 0z1 þ w31 g 0:1x1, z1 þ w33 g 2y1
Property 6.6. If the set U is the “interval+ellipsoidal+polyhe-dral” uncertainty set 3.8 with Ψ = 1, then the correspondingrobust counterpart constraint 6.3 becomes
∑maimxm þ ∑
kbikyk þ ziΓ þ ∑
m ∈ Mi
jqimj þ ∑k ∈ Ki
jqikj
þ jqi0j þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
wim2 þ ∑
k ∈ Ki
wik2 þ wi0
2r
e pi
zi g jaimxm � qim � wimj "m ∈ Mi
zi g jbikyk � qik � wikj " k ∈ Ki
zi g jpi þ qi0 þ wi0j
8>>>>>>>>>><>>>>>>>>>>:
ð6:14ÞThe proof is shown in Appendix B.
Remark 6.5. As in Remark 6.1, the robust counterpart can beequivalently rewritten as follows by introducing auxiliary
variables and eliminating the absolute value operators:
∑maimxm þ ∑
kbikyk þ ziΓ þ ∑
m ∈ Mi
uim þ ∑k ∈ Ki
uik
þ ui0 þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
wim2 þ ∑
k ∈ Ki
wik2 þ wi0
2r
e pi
�uim e qim e uim " m ∈ Mi
�uik e qik e uik " k ∈ Ki
�ui0 e qi0 e ui0�zi e aimxm � qim � wim e zi " m ∈ Mi
�zi e bikyk � qik � wik e zi " k ∈ Ki
�zi e pi þ qi0 þ wi0 e zi
8>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>:
ð6:15ÞMotivating Example 2 (Continued). The robust counterpart
formulation for the third constraint is
x1 � 20y1 þ z1Γ1 þ u31 þ u33 þ Ω1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiw31
2 þ w332
pe 0
�u31 e q31 e u31, �u33 e q33 e u33�z1 e 0:1x1 � q31 � w31 e z1, �z1 e 2y1 � q33 � w33 e z1
The different uncertainty set induced robust counterpart for-mulations are summarized in Table 1. Finally, we point out thatfor the case of LHS only or RHS only uncertainty, the corre-sponding robust counterpart optimization formulations can bederived based on the above results of simultaneous LHS andRHS uncertainty.For example, for LHS only uncertainty, we have pi = 0, then the
box set induced robust counterpart 6.4 is reduced to
∑maimxm þ ∑
kbikyk
þ Ψ½ ∑m ∈ Mi
aimjxmj þ ∑k ∈ Ki
bikjykj� e pi ð6:16Þ
Similarly, for RHS only uncertainty, aim = 0, bik = 0, then thebox set induced robust counterpart 6.4 is reduced to
∑maimxm þ ∑
kbikyk þ Ψpi e pi ð6:17Þ
6.2. Objective Function Coefficients’ Uncertainty. Consid-ering the objective coefficients uncertainty in the mixed integerlinear optimization problem 2.7:
max ∑m~cmxm þ ∑
k
~dkyk ð6:18Þ
To derive the corresponding robust counterpart formulation, theobjective uncertainty is equivalently transformed into constraintLHS uncertainty as follows
max zs:t: z� ∑
m~cmxm þ ∑
k
~dkyk e 0 ð6:19Þ
Then the robust counterpart formulation can be applied on theresulting constraints which contain LHS only uncertainty. Asummary of the robust counterpart formulation for the ith mixedinteger linear constraint is shown in Table 6.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10590 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Motivating Example 2 (Continued). To derive the robustcounterpart for the objective function coefficients’ uncertainty inmotivating example 2, the original objective function is trans-formed into the following constraint first:
z� ð3x1 þ 2x2 � 10y1 � 5y2Þ e 0
Then, the set induced robust counterpart constraint for theresulting new constraint can be formulated. For example, the boxset induced robust formulation is
z� ð3x1 þ 2x2 � 10y1 � 5y2Þþ Ψ0ð0:3x1 þ 0:2x2 þ y1 þ 0:5y2Þ e 0
The ellipsoidal set induced robust counterpart constraint is
z� ð3x1 þ 2x2 � 10y1 � 5y2Þ
þ Ω0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:09x12 þ 0:04x22 þ y12 þ 0:25y22
pe 0
The polyhedral set induced robust counterpart constraint is
z� ð3x1 þ 2x2 � 10y1 � 5y2Þ þ v0Γ0 e 0v0 g 0:3x1, v0 g 0:2x2, v0 g y1, v0 g 0:5y2
(
The “interval+ellipsoidal” set induced robust counterpart con-straint is
z� ð3x1 þ 2x2 � 10y1 � 5y2Þ þ ð0:3u01 þ 0:2u02 þ u03þ 0:5u04Þ þ Ω0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi0:09z012 þ 0:04z022 þ z032 þ 0:25z042
pe 0
�u01 e x1 � z01 e u01, �u02 e x2 � z02 e u02�u03 e y1 � z03 e u03, �u04 e y2 � z04 e u04
8>>>><>>>>:
7. COMPUTATIONAL STUDIES FOR ROBUST MIXEDINTEGER LINEAR OPTIMIZATION
Example 7.1. Consider the following mixed 0�1 program-ming problem
max 3x1 þ 2x2 � 10y1 � 5y2s:t: x1 þ x2 e 20
x1 þ 2x2 e 12x1 � 20y1 e 0x2 � 20y2 e 0x1 � x2 e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g
Let us assume that all the objective function coefficients, the LHS, andRHS of the constraints parameter are possibly subject to uncertainty.To find robust solutions of this problem,we first convert the objectiveuncertainty into LHS uncertainty as shown in section 6.2:
max zs:t: z� ð3x1 þ 2x2 � 10y1 � 5y2Þ e 0
x1 þ x2 e 20x1 þ 2x2 e 12x1 � 20y1 e 0x2 � 20y2 e 0x1 � x2 e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g
The corresponding uncertain version of the above problem can berepresented using the general form as follows
max zs:t: A0z þ ~Ax þ ~By e ~p
0 e x1, x2 e 10, y1, y2 ∈ f0, 1g
Figure 18. Solution for simultaneous yield, price, cost, and demand uncertainty.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10591 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
where ~A = {aim + aimξim}, ~B = {bik + bikξik}, ~p = {pi + ~piξi0}, ξim, ξik,ξi0 are independent uncertain parameters, aim, bik, and pi are nominaldata defined as follows
A0 ¼
100000
26666666664
37777777775, faimg ¼
�3 �21 11 21 00 11 �1
26666666664
37777777775,
fbikg ¼
10 50 00 0
�20 00 �200 0
26666666664
37777777775, fpig ¼
0201200�4
26666666664
37777777775
Assuming 10% uncertainty level for the possible uncertainty(i.e., aim = 0.1|aim|, bik = 0.1|bik|, pi = 0.1|pi|), the robustcounterpart model under different uncertainty sets can beformulated as shown in section 6. Note that for the constraintscontaining only continuous variables, their correspondingrobust counterpart constraints can be formulated using themethod presented in section 4.In this example, several different uncertainty cases are studied,
which include LHS only uncertainty, RHS only uncertainty, OBJonly uncertainty, simultaneous LHS, RHS, and OBJ uncertainty.Without giving a complete description of all the robust
counterpart optimization models, we list several robust counter-part models using the box set induced robust counterpartformulation as follows:(1) Considering LHS only uncertainty for all the constraints,
the box set induced robust counterpart model is
max 3x1 þ 2x2 � 10y1 � 5y2s:t: x1 þ x2 þ Ψð0:1x1 þ 0:1x2Þ e 20
x1 þ 2x2 þ Ψð0:1x1 þ 0:2x2Þ e 12x1 � 20y1 þ Ψð0:1x1 þ 2y1Þ e 0x2 � 20y2 þ Ψð0:1x2 þ 2y2Þ e 0x1 � x2 þ Ψð0:1x1 þ 0:1x2Þ e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g
Note that the same uncertainty set parameter Ψ isapplied for all the constraints here. A similar setting willbe applied for the rest of the models.
(2) Considering simultaneous LHS and RHS uncer-tainty, the box set induced robust counterpartmodel is
max 3x1 þ 2x2 � 10y1 � 5y2s:t: x1 þ x2 þ Ψð0:1x1 þ 0:1x2 þ 2Þ e 20
x1 þ 2x2 þ Ψð0:1x1 þ 0:2x2 þ 1:2Þ e 12x1 � 20y1 þ Ψð0:1x1 þ 2y1Þ e 0x2 � 20y2 þ Ψð0:1x2 þ 2y2Þ e 0x1 � x2 þ Ψð0:1x1 þ 0:1x2 þ 0:4Þ e � 40 e x1, x2 e 10, y1, y2 ∈ f0, 1g
Table 6. Summary on Robust Counterpart Formulation for the ith Mixed Integer Linear Constraint

10592 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
(3) Considering simultaneous LHS, RHS and OBJ uncer-tainty, the robust counterpart model is
max zs:t: z� ð3x1 þ 2x2 � 10y1 � 5y2Þ
þΨð0:3x1 þ 0:2x2 þ y1 þ 0:5y2Þ e 0x1þ x2 þ Ψð0:1x1 þ 0:1x2 þ 2Þ e 20x1þ 2x2 þΨð0:1x1 þ 0:2x2 þ 1:2Þ e 12x1 � 20y1þΨð0:1x1 þ 2y1Þ e 0x2 � 20y2þΨð0:1x2 þ 2y2Þ e 0x1 � x2þΨð0:1x1 þ 0:1x2 þ 0:4Þ e � 40 e x1,
x2 e 10, y1, y2 ∈ f0, 1g
On the basis of the solution of the robust formulations underdifferent cases of uncertainties, the following remarks canbe made:(1) For RHS only uncertainty, which is a special case where
the number of uncertain parameters for every constraint is 1,the solution is identical for ellipsoidal and polyhedral setinduced models, and also for the “interval+ellipsoidal”, “inter-val+polyhedral” and “interval+ellipsoidal+polyhedral” uncer-tainty set induced models as shown in Figure 21. Further-more, as Ω e 1 and Γ e 1, all the solutions are identicalbecause as Ω = Γ e 1, the different uncertainty sets areactually the same interval set.
Figure 19. Only LHS uncertainty for all constraints (|Ji| = 2). Note: for polyhedral model, as the Γ >√2 model is infeasible.

10593 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
(2) It can be observed from Figures 19a, 20a, 21a, 22a, and 23athat the ellipsoidal set based robust counterpart solution isequal or worse (even becomes infeasible with large Ω value)than the “interval+ellipsoidal” set based solution. Similarly,the polyhedral set based solution is equal or worse than the“interval +polyhedral” set based solution. This is because forthe ellipsoidal set or polyhedral set, its combination with theinterval set makes the resulting uncertainty set smaller, and
thus less conservative. This suggests that for bounded un-certainty, the uncertainty set should be combined with intervalto avoid conservative solutions.(3) Comparing the “interval+ellipsoidal” and the “interval
+polyhedral” induced model from Figures 19b, 20b, 22b, and23b, when Γ = Ω(|Ji|)
1/2, the “interval+polyhedral” basedsolution is always worse than the “interval+ellipsoidal” basedsolution, which is because the “interval+polyhedral”
Figure 20. LHS+LHS uncertainty for all constraints (|Ji| = 3). Note: for polyhedral model and “box” model, infeasible for large Γ,Ψ.

10594 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
uncertainty set is larger and completely covers the “interval+ellipsoidal” set; when Γ =Ω, the “interval+polyhedral” basedsolution is always better than the “interval+ellipsoidal”based solution because the “interval+polyhedral” uncertaintyset is smaller and completely covered by the “interval+ellipsoidal” set.(4) Comparing the “interval+ellipsoidal+polyhedral” set
based model with others from Figures 19b, 20b, 22b, and 23b,it can be observed that as the Γ value increases from Ω to
Ω(|Ji|)1/2, the “interval+ellipsoidal+polyhedral” based solution
switches from the “interval+polyhedral” based solution withΓ = Ω to the “interval+ellipsoidal” based solution withΓ = Ω(|Ji|)
1/2, because the intersection between ellipsoid andpolyhedron is exactly changing from the polyhedral with Γ = Ωto the ellipsoid with parameter Γ = Ω(|Ji|)
1/2.Finally, from the above analysis, it can be concluded all the
different models have the flexibility to adjust the solutionbetween the worst-case scenario and the deterministic solution,
Figure 21. Only RHS uncertainty for all constraints (|Ji| = 1).

10595 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
depending on the selection of the adjustable parameters for theircorresponding uncertainty set. On the other hand, the degree ofconservatism of the models differs, and some models evenbecome infeasible with relatively large uncertainty set parametervalues.Example 7.2 Processing Scheduling Problem. This exam-
ple involves the scheduling of a batch chemical process related tothe production of two chemical products using three raw
materials. The state-task-network (STN) representation of thisexample is shown in Figure 24. The deterministic MILP for-mulation (7.1) for the scheduling of this batch process is basedon ref 37, and the detailed problem data can be found in ref 37.Through this example, we study the different robust counter-
part optimization formulations introduced in section 6 consider-ing different types of uncertainty cases. The scheduling problem’sMILP formulation is as follows:
Figure 22. Only OBJ uncertainty (|Ji| = 4). Note: for polyhedral model; infeasible for large Γ.

10596 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
max profits:t: profit� ∑
s ∈ sp , n~pricesds, n þ ∑
s ∈ sr
~pricesðSTIs � STFsÞ e 0
ð7.1aÞ∑i ∈ Ij
wvi, j, n e 1 " i ∈ I ð7:1bÞ
sts, n ¼ sts, n�1 � ds, n � ∑i ∈ Is
FCs, i ∑j ∈ Ji
bi, j, n
þ ∑i ∈ Is
FPs, i ∑j ∈ Ji
bi, j, n�1 " s ∈ S, " n ∈ N
ð7:1cÞ
Figure 23. Objective uncertainty (|Ji| = 4) and LHS uncertainty for the third and fourth constraints (|Ji| = 2).

10597 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
sts, n e stmaxs " s ∈ S, " n ∈ N ð7:1dÞ
vmini, j wvi, j, n e bi, j, n e vmax
i, j wvi, j, n " i ∈ I, " j ∈ Ji, " n ∈ N
ð7:1eÞ
∑nds, n g ~rs " s ∈ S ð7:1fÞ
Tfi, j, n g Tsi, j, n þ ~Ri, jwvi, j, n þ ~βi, jbi, j, n
" i ∈ I, " j ∈ Ji, " n ∈ N ð7:1gÞ
Tsi, j, nþ1 g Tfi, j, n �Hð1� wvi, j, nÞ " i ∈ I, " j ∈ Ji,
" n ∈ N ð7:1hÞ
Tsi, j, nþ1 g Tfi0 , j, n �Hð1� wvi, 0j, nÞ " i, i0 ∈ Ij,
" j ∈ J, " n ∈ N ð7:1iÞ
Tsi, j, nþ1 g Tfi0 , j0 , n �Hð1� wvi, 0 j0 , nÞ" i, i0 ∈ Ij, i 6¼ i0, " j, j0 ∈ J, " n ∈ N ð7:1jÞ
Tsi, j, nþ1 g Tsi, j, n " i ∈ I, " j ∈ Ji, " n ∈ N
ð7:1kÞ
Tfi, j, nþ1 g Tfi, j, n " i ∈ I, " j ∈ Ji, " n ∈ N
ð7:1lÞ
Tsi, j, n e H " j ∈ Ji, " n ∈ N ð7:1mÞ
Tfi, j, n e H " i ∈ I, " j ∈ Ji, " n ∈ N ð7:1nÞIn the above formulation, the objective function 7.1a max-
imizes the profit; allocation constraints 7.1b state that only one ofthe tasks can be performed in each unit at an event point (n);constraints 7.1c represent the material balances for each state (s)expressing that at each event point (n) the amount is equal to thatat event point (n � 1), adjusted by any amounts produced andconsumed between event points (n � 1) and (n), and deliveredto the market at event point (n); the storage and capacitylimitations of production units are expressed by constraints7.1d and 7.1e; constraints 7.1f are written to satisfy the demandsof final products; and constraints 7.1g to 7.1n represent timelimitations due to task duration and sequence requirements inthe same or different production units.In this example, uncertainties in material and product prices,
processing times of tasks in different units, and product demandsare studied. We assume bounded uncertainty and assign a
Figure 24. State Task Network (STN) representation of the batch chemical process.
Figure 25. Price uncertainty (|Ji| = 5).
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10598 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
maximum of 5% deviation of price data, 5% of processing timesand 20% of demand data from their nominal values. 1. Price
Uncertainty. Considering only price uncertainty, then onlyconstraint 7.1a is affected, where ~prices are the uncertain para-meters. For the process network in this example, there are threeraw materials and two products, so the total number of uncertainparameters in the constraint is 5 (i.e., |Ji| = 5). We first study theellipsoidal and polyhedral sets related robust formulations pre-sented in section 6 and apply them on this constraint. The resultsare shown in Figure 25. From the results shown in Figure 25, it isseen that when Ω e 1 and Γ e 1, (a) the ellipsoidal and the“interval+ellipsoidal” set based solutions are identical, and (b)the polyhedral and the “interval+polyhedral” set based solutionsare identical. This is because the corresponding uncertainty setsare also identical. AsΩ > 1 and Γ > 1, the combined uncertaintysets based solutions are better because their uncertainty sets aresmaller with the restriction of the bounded box comparing to thepure ellipsoidal and pure polyhedral set, whose correspondingsolutions quickly deteriorate. The above analysis further verifies theearlier observation that for bounded uncertainty, a combination setis preferred to obtain less conservative solution. Finally, consideringthe “interval+ellispsoidal+polyhedral” set will only lead to solutionsbetween the “interval+ellispoidal” and the “interval+polyhderal”cases and require a more complex model. Hence it is not suggestedfor the solution of robust scheduling problems.2. Processing Time Uncertainty. Here we consider only
processing time uncertainty in constraints 7.1g, where i,j and i,j
are uncertain parameters. Thus, every such constraint has twouncertain parameters (i.e., |Ji| = 2). We study the ellipsoidal andpolyhedral sets related robust formulations presented in section6 and apply them on this constraint. The results are shown inFigure 26. From the solution, same conclusions can bemade as inthe analysis for price uncertainty.3. Demand Uncertainty. Considering only demand uncer-
tainty, then constraints 7.1f are affected. For each one of theseconstraints, there is only uncertain parameter on the RHS of theconstraint, and the uncertain parameter is the demand data ~rs.Considering that the uncertainty is bounded, we only need tostudy the box set and those combined sets. Since the number ofuncertain parameters is 1, for each constraint, the differentuncertainty sets are reduced to 1-dimenstion interval set whichcan be described as
U ¼ fξijjξij e Δg ð7:2Þwhere Δ is defined as Ψ, min(Ω,1), min(Γ,1), min(Ω,Γ,1) forthe box, “interval+ellipsoidal”, “interval+polyhedral”, “interval+polyhedral+ellipsoidal” uncertainty set, respectively. Thus, thedifferent uncertainty set induced robust counterpart formulationswill be identical with same uncertainty set parameter value Δ.Here, we plot the result of their robust counterpart solution asshown in Figure 27.Finally, we studied the worst-case scenario solution for the
different uncertainty cases. The worst-case scenario solutionmeans that the uncertainty set covers the whole uncertaintyspace. Among the different uncertainty sets to cover the wholebounded uncertain space, the box uncertainty set takes thesmallest size, and here the box set with Ψ = 1 (i.e., interval set)
Figure 26. Processing time uncertainty (|Ji| = 2).
Figure 27. Demand uncertainty (|Ji| = 1).
Table 7. Worst-Case Scenario Solution
deterministic
price
uncertainty
processing
time uncertainty
demand
uncertainty
objective value 1088.75 959.56 974.95 1032.71
babazadeh
Highlight
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.

10599 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
is applied for the three types on uncertainty individually and theresults are shown in Table 7. Comparing the result, we canconclude that with the given uncertainty characteristics, the priceuncertainty has the largest effect on the final profit, whereas thedemand uncertainty has the least effect on the final profit.
8. CONCLUSIONS
Set-induced robust counterpart optimization techniques aresystematically studied in this paper. Several important uncer-tainty sets are studied, including those studied in the literatureand also several new ones proposed in this work. New uncer-tainty sets such as the adjustable box, ellipsoidal, polyhedral, and“interval+ellipsoidal+polyhedral” set are introduced and theirrelationship with some well-known uncertainty sets presented inthe literature is discussed. The relationships between thosedifferent uncertainty sets are extensively discussed, and usefulinsights are gained for their corresponding robust counterpartmodels. For uncertainty in the left-hand side, right-hand side, andobjective function, the robust counterpart formulations inducedby those different uncertainty sets for linear optimization pro-blems and mixed integer linear optimization problems arederived. The different uncertainty set based robust counterpartformulations are also compared through numerical studies, aproduction planning and a process scheduling problem.
’APPENDIX A
Derivation of the robust counterpart for a linear constraintunder simultaneous LHS and RHS uncertainty.Consider the ith linear constraint of problem 2.1 with simul-
taneous LHS and the RHS uncertainty:
∑j ˇ Ji
aijxj þ ∑j ∈ Ji
~aijxj e ~bi ðA:1Þ
where ~aij = aij + ξijaij"j∈ Ji, ~bi = bi + ξi0bi. Incorporating auxiliaryvariable x0 and an additional constraint x0 = �1, the constraintcan be rewritten as
bix0 þ ∑jaijxj þ ½ξi0bix0 þ ∑
j ∈ Ji
ξijaijxj� e 0 ðA:2Þ
With a given uncertainty set U for ξi0 and ξij, the correspondingset induced robust counterpart is
bix0 þ ∑jaijxj þ ½max
ξ ∈ Ufξi0bix0 þ ∑
j ∈ Ji
ξijaijxjg� e 0
ðA:3ÞWith the following definition
ξi ¼ ½ξi0; fξijg� ðA:4aÞ
Ai ¼ ½bi, faijg� ðA:4bÞ
Ai ¼ ½bi, faijg� ðA:4cÞ
X ¼ ½x0; fxjg� ðA:4dÞ
J0i ¼ Ji ∪ f0g ðA:4eÞ
constraint A.3 can be rewritten as
∑jAijXj þ max
ξ ∈ UfξiAiXg e 0 ðA:5Þ
Property A.1. The box uncertainty set 3.1 induced robustcounterpart formulation A.5 is equivalent to
∑jaijxj þ Ψ
"∑j ∈ J
0i
aijjxjj þ bi
#e bi ðA:6Þ
Proof. Applying Property 3.1 on A.5, we obtain the followingequivalent problem
∑jAijXj þ
"Ψ ∑
j ∈ Ji
AijjXjj#e 0
Expanding the above constraints using the previously definedvariables, the resulting robust counterpart formulation is
bix0 þ ∑jaijxj þ Ψ½ ∑
j ∈ Ji
aijjxjj þ bijx0j� e 0
Notice that x0 = �1, so the absolute value operation on them isautomatically eliminated. The final robust counterpart formula-tion is
∑jaijxj þ Ψ½ ∑
j ∈ Ji
aijjxjj þ bi� e bi
Property A.2. The ellipsoidal uncertainty set induced robustcounterpart formulation A.5 is equivalent to
∑jaijxj þ
"Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2xj2 þ bi
2s #
e bi ðA:7Þ
Proof. Applying Property 3.2 on A.5, the ellipsoidal baseduncertainty set induced robust counterpart is
∑jAijXj þ
"Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
Aij2Xj
2
s #e 0
Expanding the above constraints, the resulting robust counter-part formulation is
bix0 þ ∑jaijxj þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2xj2 þ bi
2x02
se 0
Notice that x0 = �1, so the final robust counterpart formula-tion is
∑jaijxj þ
"Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2xj2 þ bi
2s #
e bi
Property A.3. The polyhedral uncertainty set induced robustcounterpart formulation A.5 is equivalent to

10600 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
∑jaijxj þ ziΓ e bi
zi g aijjxjj "j ∈ Ji, zi g bi
8><>: ðA:8Þ
Proof. Applying Property 3.3 on A.5, the ellipsoidal baseduncertainty set induced robust counterpart is
∑jAijXj þ Γzi e 0
zi g AijXjj, "j ∈ Ji
8><>:
Expanding the above constraints, the resulting robust counter-part formulation is
bix0 þ ∑jaijxj þ ziΓ e 0
zi g aijjxjj " j ∈ Ji; zi g bix0
8><>:
Notice that x0 =�1, so the final robust counterpart formulationis
∑jaijxj þ ziΓ e bi
zi g aijjxjj " j ∈ Ji, zi g bi
8><>:
Property A.4. The “interval+ellipsoidal” uncertainty set in-duced robust counterpart formulation A.5 is equivalent to
∑jaijxj þ
"∑j ∈ Ji
aijjxj � zijj þ bij1 þ zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2zij2 þ bi
2zi02
s #e bi ðA:9Þ
Proof. Applying Property 3.4 on A.5, the “interval+ellipsoidal”based uncertainty set induced robust counterpart is
∑jAijXj þ
"∑j ∈ Ji
AijjXj � zijj þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
Aij2zij2
s #e 0
Expanding the above constraints, the resulting robust counter-part formulation is
bix0 þ ∑jaijxj þ
"∑j ∈ Ji
aijjxj � zijj þ bijx0 � zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
j ∈ Mi
aij2zij2 þ bi
2zi02
s #e 0:
Notice that x0 = �1, the final robust counterpart formulation is
∑jaijxj þ
"∑j ∈ Ji
aijjxj � zijj þ bij1 þ zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
aij2zij2 þ bi
2zi02
s #e bi
Property A.5. The “interval+polyhedral” uncertainty set in-duced robust counterpart formulation A.5 is equivalent to
∑jaijxj þ
"ziΓ þ ∑
j ∈ Ji
pij þ pi0
#e bi
zi þ pij g aijjxjj " j ∈ Ji, zi þ pi0 g bizi g 0, pij g 0, pi0 g 0
8>>>>><>>>>>:
ðA:10Þ
Proof. Applying Property 3.5 on A.5, the robust counterpart is
∑jAijxj þ ∑
j ∈ Ji
pij þ Γzi e 0
zi þ pij g Aijjxjj " j ∈ Jizi g 0, pij g 0
8>>><>>>:
Expanding the above constraints, the resulting robust counter-part formulation is
bix0 þ ∑jaijxj þ
"∑j ∈ Ji
pij þ pi0 þ ziΓ
#e 0
zi þ pij g aijjxjj, " j ∈ Ji; zi þ pi0 g bijx0jzi g 0, pij g 0, pi0 g 0
8>>>>><>>>>>:
Notice that x0 =�1, so the final robust counterpart formulationis
∑jaijxj þ
"ziΓ þ ∑
j ∈ Ji
pij þ pi0
#e bi
zi þ pij g aijjxjj " j ∈ Ji, zi þ pi0 g bizi g 0, pij g 0, pi0 g 0
8>>>>><>>>>>:
Property A.6. The “interval+polyhedral+ellipsoidal” uncer-tainty set induced robust counterpart formulation A.5 is equiva-lent to
∑jaijxj þ
"ziΓ þ ∑
j ∈ Ji
jpijj þ jpi0j þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij þ w2
i0
r #e bi
zi g j � bi � pi0 � wi0j as zi g jbi þ pi0 þ wi0j
8>>><>>>:
ðA:11Þ
Proof. Applying Property 3.6 on A.5, the robust counterpart is
∑jAijxj þ
"∑j ∈ Ji
jpijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
w2ij
rþ Γzi
#e 0
zi g jAijxj � pij � wijj " j ∈ Ji
8>>><>>>:

10601 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Expanding the above constraints, the resulting robust counter-part formulation is
bix0 þ ∑jaijxj þ
"∑j ∈ Ji
jpijj þ jpi0j þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
wij2 þ wi0
2r
þ ziΓ
#e 0
zi g jaijxj � pij � wijj " j ∈ Ji; zi g jbix0 � pi0 � wi0j
8>>><>>>:
Notice that x0 = �1, so the final robust counterpart formula-tion is
∑jaijxj þ
"ziΓ þ ∑
j ∈ Ji
jpijj þ jpi0j þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
wij2 þ wi0
2r #
e bi
zi g jaijxj � pij � wijj " j ∈ Ji, zi g jbi þ pi0 þ wi0j
8>>><>>>:
’APPENDIX B
Derivation of the robust counterpart for a mixed integer linearconstraint under simultaneous LHS and RHS uncertainty
As presented in section 6.1, the robust counterpart formula-tion for the ith mixed integer linear constraint in problem 2.7with simultaneous LHS and RHS uncertainty can be rewritten aseq 6.3; that is,
∑jAijXj þ max
ξi ∈ U
(∑j ∈ Ji
ξijAijXj
)e 0
where Ai, Ai, X, ξi, and Ji are defined in equations 6.2. In thefollowing, proofs for properties 6.1�6.6 are presented.
B.1. Proof of Property 6.1. Notice that the derivationprocedure in Section 4 for the robust linear counterpart con-straint also applies for the mixed integer linear constraint since itapplies for both continuous and integer variables. So, applyingProperty 4.1 on constraint 6.3, we can obtain the followingequivalent problem
∑jAijXj þ
"Ψ ∑
j ∈ Ji
AijjXjj#e 0
Expand the above constraints using the definition in equations6.2 and the resulting robust counterpart formulation is
pix0 þ ∑maimxm þ ∑
kbikyk þ Ψ
"∑
m ∈ Mi
aimjxmj
þ ∑k ∈ Ki
bikjykj þ pijx0j#e 0
Notice that x0 =�1, so the final robust counterpart formulation6.4 is obtained:
∑maimxm þ ∑
k
bikyk þ Ψ
"∑
m ∈ Mi
aimjxmj þ ∑k ∈ Ki
bikjykj þ pi
#e pi
B.2. Proof of Property 6.2. Applying Property 4.2 on 6.3, weobtain the following equivalent problem
∑jAijXj þ
"Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
Aij2Xj
2
s #e 0
Expand the above constraints using the definition in equa-tions 6.2, and then the resulting robust counterpart formula-tion is
pix0 þ ∑maimxm þ ∑
mbikyk
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2xm2 þ ∑
k ∈ Ki
bik2yk2 þ pi
2x02s
e 0
Notice that x0 = �1, so the final robust counterpart formula-tion 6.7 is obtained:
∑maimxm þ ∑
mbikyk
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2xm2 þ ∑
k ∈ Ki
bik2yk2 þ pi
2
se pi
B.3. Proof of Property 6.3. Applying Property 4.3 on 6.3, weobtain the following equivalent problem
∑jAijXj þ Γzi e 0
zi g AijjXjj, "j ∈ Ji
8><>:
Expand the above constraints using the definition in equations6.2, and the resulting robust counterpart formulation is
pix0 þ ∑maimxm þ ∑
kbikyk þ ziΓ e 0
zi g aimjxmj "m ∈ Mi
zi g bikjykj " k ∈ Ki
zi g pijx0j
8>>>>><>>>>>:
Notice that x0 =�1, so the final robust counterpart formulation6.8 is obtained:
∑maimxm þ ∑
kbikyk þ ziΓ e pi
zi g aimjxmj " m ∈ Mi
zi g bikjykj " k ∈ Ki
zi g pi
8>>>>><>>>>>:
B.4. Proof of Property 6.4. Applying Property 4.4 on 6.3, weobtain the following equivalent problem
∑jAijXj þ
"∑j ∈ Ji
AijjXj � zijj þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
Aij2zij2
s #e 0
Expand the above constraints using the definition in equa-tions 6.2, and the resulting robust counterpart formulation isobtained:

10602 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
pix0 þ ∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
aimjxm � zimj
þ ∑m ∈ Ki
bikjyk � zikj þ pijx0 � zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2zim2 þ ∑
k ∈ Ki
bik2zik2 þ pi
2zi02s
e 0
Notice that x0 =� 1, so the final robust counterpart formula-tion 6.10 is obtained:
∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
aimjxm � zimj
þ ∑m ∈ Ki
bikjyk � zikj þ pij1 þ zi0j
þ Ω
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
aim2zim2 þ ∑
k ∈ Ki
bik2zik2 þ pi
2zi02s
e pi
B.5. Proof of Property 6.5. Applying Property 4.5 on 6.3, weobtain the following equivalent problem
∑jAijXj þ ∑
j ∈ Ji
wij þ Γzi e 0
zi þ wij g AijjXjj " j ∈ Jizi g 0,wij g 0
8>>><>>>:
Expand the above constraints using the definition in equations6.2, and the resulting robust counterpart formulation is
pix0 þ ∑maimxm þ ∑
kbikyk þ ½ ∑
m ∈ Mi
wim þ ∑k ∈ Ki
wik þ wi0 þ ziΓ� e 0
zi þ wim g aimjxmj " m ∈ Mi
zi þ wik g bikjykj " k ∈ Ki
zi þ wi0 g pijx0j
8>>>>>><>>>>>>:
Notice that x0 =�1, so the final robust counterpart formulation6.12 is obtained:
∑maimxm þ ∑
kbikyk þ ½ziΓi þ ∑
m ∈ Mi
wim þ ∑k ∈ Ki
wik þ wi0� e pi
zi þ wim g aimjxmj " m ∈ Mi
zi þ wik g bikjykj " k ∈ Ki
zi þ wi0 g pi
8>>>>>><>>>>>>:
B.6. Proof of Property 6.6. Applying Property 4.6 on 6.3, weobtain the following equivalent problem
∑jAijXj þ
"∑j ∈ Ji
jqijj þ Ωffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑j ∈ Ji
wij2
rþ Γzi
#e 0
zi g jAijXj � qij � wijj " j ∈ Ji
8>>><>>>:
Expand the above constraints using the definition in equations6.2, and the resulting robust counterpart formulation is
pix0 þ ∑maimxm þ ∑
kbikyk þ ∑
m ∈ Mi
jqimj þ ∑k ∈ Ki
jqikj þ jqi0j
þΩffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
w2im þ ∑
k ∈ Ki
w2ik þ w2
i0
rþ ziΓ e 0
zi g jaimxm � qim � wimj " m ∈ Mi
zi g jbikyk � qik � vikj " k ∈ Ki
zi g jpix0 � qi0 � wi0j
8>>>>>>>>>><>>>>>>>>>>:
Notice that x0 =�1, so the final robust counterpart formulation6.14 is obtained:
∑maimxm þ ∑
kbikyk þ ziΓ þ ∑
m ∈ Mi
jqimj þ ∑k ∈ Ki
jqikj þ jqi0j
þΩffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi∑
m ∈ Mi
wim2 þ ∑
k ∈ Ki
wik2 þ wi0
2r
e pi
zi g jaimxm � qim � wimj " m ∈ Mi
zi g jbikyk � qik � wikj " k ∈ Ki
zi g jpi þ qi0 þ wi0j
8>>>>>>>>>><>>>>>>>>>>:
’AUTHOR INFORMATION
Corresponding Author*E-mail: [email protected]. Tel: 609-258-4595. Fax:609-258-0211.
’ACKNOWLEDGMENT
The authors gratefully acknowledge financial support from theNational Science Foundation (CMMI-0856021) and the Na-tional Institute of Health (5R01LM009338).
’NOMENCLATURE FOR THE PROCESS SCHEDULINGMODEL (7.1)i ∈ I = tasksIs = tasks which produce or consume state (s)Ij = tasks which can be performed in unit (j)j ∈ J = unitsJi = units which are suitable for performing task (i)n ∈ N = event points representing the beginning of a tasks ∈ S = statesSp = states belong to productsSr = states belong to raw materialsprices = price of state (s)STIs = initial amount of state (s)STFs = final amount of state (s)ds,n = amount of state (s) delivered to the market at event point
(n)wvi,j,n = binary, whether or not task (i) in unit (j) start at event
point (n)sts,n = continuous, amount of state (s) at event point (n)Fs,iP ,Fs,iC = proportion of state (s) produced, consumed by task(i),
respectivelybi,j,n = amount of material undertaking task (i) in unit (j) at event
point (n)stmax
s = available maximum storage capacity for state (s)Vi,jmin,Vi,j
max = minimum amount, maximum capacity of unit (j)when processing task (i)
rs = market demand for state (s) at the end of the timehorizon

10603 dx.doi.org/10.1021/ie200150p |Ind. Eng. Chem. Res. 2011, 50, 10567–10603
Industrial & Engineering Chemistry Research ARTICLE
Tfi,j,n = time at which task (i) finishes in unit (j) while it starts atevent point (n)
Tsi,j,n = time at which task (i) starts in unit (j) at event point (n)Ri,j, βi,j = variable term of processing time of task (i) in unit (j)H = time horizon
’REFERENCES
(1) Ben-Tal, A.; Nemirovski, A. Robust solutions of linear program-ming problems contaminated with uncertain data.Math. Program. 2000,88, 411–424.(2) Ben-Tal, A.; Nemirovski, A. Robust truss topology design via
semidefinite programming. SIAM J. Optim. 1997, 7 (4), 991–1016.(3) Ben-Tal, A.; Nemirovski, A. Robust optimization—Methodol-
ogy and applications. Math. Program. 2002, 92 (3), 453–480.(4) Soyster, A. L. Convex programming with set-inclusive con-
straints and applications to inexact linear programming. Oper. Res.1973, 21, 1154–1157.(5) Ben-Tal, A.; Goryashko, A.; Guslitzer, E.; Nemirovski, A. Ad-
justable robust solutions of uncertain linear programs. Math. Program.2004, 99 (2), 351–376.(6) Ben-Tal, A.; Nemirovski, A. Robust convex optimization. Math.
Oper. Res. 1998, 23 (4), 769–805.(7) Ben-Tal, A.; Nemirovski, A. Robust solutions of uncertain linear
programs. Oper. Res. Lett. 1999, 25 (1), 1–13.(8) ElGhaoui, L.; Lebret, H. Robust solutions to least-squares
problems with uncertain data. Siam J. Matrix Anal. Appl. 1997, 18 (4),1035–1064.(9) El-Ghaoui, L.; Oustry, F.; Lebret, H. Robust solutions to
uncertain semidefinite programs. SIAM J. Optim. 1998, 9, 33–52.(10) Lin, X.; Janak, S. L.; Floudas, C. A. A new robust optimization
approach for scheduling under uncertainty: I. Bounded uncertainty.Comput. Chem. Eng. 2004, 28, 1069–1085.(11) Janak, S. L.; Lin, X.; Floudas, C. A. A new robust optimization
approach for scheduling under uncertainty: II. Uncertainty with knownprobability distribution. Comput. Chem. Eng. 2007, 31, 171–195.(12) Verderame, P.M.; Floudas, C. A. Operational planning of large-
scale industrial batch plants under demand due date and amountuncertainty. I. Robust optimization framework. Ind. Eng. Chem. Res.2009, 48 (15), 7214–7231.(13) Verderame, P.M.; Floudas, C. A. Operational planning of large-
scale industrial batch plants under demand due date and amountuncertainty: II. Conditional value-at-risk framework. Ind. Eng. Chem.Res. 2010, 49 (1), 260–275.(14) Verderame, P. M.; Elia, J. A.; Li, J.; Floudas, C. A. Planning and
scheduling under uncertainty: A review across multiple sectors. Ind. Eng.Chem. Res. 2010, 49 (9), 3993–4017.(15) Li, Z.; Ierapetritou, M. G. Process scheduling under uncer-
tainty: Review and challenges. Comput. Chem. Eng. 2008, 32, 715–727.(16) Bertsimas, D.; Sim,M. The price of robustness.Oper. Res. 2004,
52 (1), 35–53.(17) Bertsimas, D.; Sim, M. Robust discrete optimization and net-
work flows. Math. Program. 2003, 98 (1�3), 49–71.(18) Bertsimas, D.; Pachamanovab, D.; Simc, M. Robust linear
optimization under general norms. Oper. Res. Letters 2004, 32, 510–516.(19) Bertsimas, D.; Sim, M. Tractable approximations to robust
conic optimization problems. Math. Program. 2006, 107 (1�2), 5–36.(20) Bertsimas, D.; Thiele, A. A robust optimization approach to
inventory theory. Oper. Res. 2006, 54 (1), 150–168.(21) Kouvelis, P.; Yu, G. Robust Discrete Optimization and Its
Applications; Kluwer Academic Publishers: Norwell, MA, 1997.(22) Chen, S. G.; Lin, Y. K. An approximate algorithm for the robust
design in a stochastic-flow network. Commun. Stat.—Theory Methods2010, 39 (13), 2440–2454.(23) Atamt€urk, A.; Zhang, M. Two-stage robust network flow and
design under demand uncertainty. Oper. Res. 2007, 55 (4), 662–673.(24) Atamturk, A. Strong formulations of robust mixed 0�1 pro-
gramming. Math. Program. 2007, 108 (2�3), 235–250.
(25) Averbakh, I. Minmax regret solutions for minimax optimizationproblems with uncertainty. Oper. Res. Lett. 2000, 27 (2), 57–65.
(26) Kasperski, A.; Zielinski, P. An approximation algorithm forinterval data minmax regret combinatorial optimization problems.Inform. Process. Lett. 2006, 97 (5), 177–180.
(27) Chen, X.; Sim, M.; Sun, P. A robust optmization perspective onstochastic programming. Oper. Res. 2007, 55 (6), 1058–1071.
(28) Chen, W. Q.; Sim, M.; Sun, J.; Teo, C. P. From CVaR touncertainty set: Implications in joint chance-constrained optimization.Oper. Res. 2010, 58 (2), 470–485.
(29) Fischetti, M.; Monaci, M. Light robustness. Lect. Notes Comput.Sci. 2009, 5868, 61–84.
(30) Goh, J.; Sim, M. Distributionally robust optimization and itstractable approximations. Oper. Res. 2010, 58 (4), 902–917.
(31) El Ghaoui, L.; Oks, M.; Oustry, F. Worst-case value-at-risk androbust portfolio optimization: A conic programming approach. Oper.Res. 2003, 51 (4), 543–556.
(32) Chen, W. Q.; Sim, M. Goal-driven optimization. Oper. Res.2009, 57 (2), 342–357.
(33) Delage, E.; Ye, Y. Distributionally robust optimization undermoment uncertainty with application to data-driven problems.Oper. Res.2010, 58 (3), 595–612.
(34) Ben-Tal, A.; Bertsimas, D.; Brown, D. B. A soft robust model foroptimization under ambiguity. Oper. Res. 2010, 58 (4), 1220–1234.
(35) Allen, D. H. Linear programming models for plant operationsplanning. Brit. Chem. Eng. 1971, 16, 685–691.
(36) Leiras, A.; Hamacher, S.; Elkamel, A. Petroleum refineryoperational planning using robust optimization. Eng. Optimization2010, 42 (12), 1119–1131.
(37) Ierapetritou, M. G.; Floudas, C. A. Effective continuous-timeformulation for short-term scheduling. 1. Multipurpose batch processes.Ind. Eng. Chem. Res. 1998, 37 (11), 4341–4359.
babazadeh
Highlight
Edited by Foxit Reader Copyright(C) by Foxit Software Company,2005-2008 For Evaluation Only.