7 Kinetics of planar rigid bodies - ETH Zkiranku/Dynamics2017/Files/7/Dynamics-week 7 exercises...
19
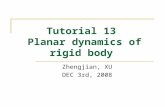
7 Kinetics of planar rigid bodies L 1 L 2 L 3 L 4 B A B C D E F G H k 7.1 The planar multibody system shown in the figure consists of 4 rigid bars L 1 , L 2 , L 3 , L 4 , and a rigid body B. The four bars are hinged on B at the points E, F , G and H . Similarly, the two opposite ends A and B of L 1 and L 2 are hinged to the ground, while points C and D are able to translate in the vertical direction. A spring of stiffness k connects points F and C , as shown. How many DOF does the system feature? (a ) DOF =0 (b ) DOF =1 (c ) DOF =2 (d ) DOF =3 (e ) DOF = ∞ Solution In order to solve the problem, we need to use the formula DOF = nL - K, (7.1) where n ∈{3, 6} whether the problem is two or three-dimensional, L is the number of rigid bodies and K is the number of holonomic constraints. In this case, n = 3 and L = 5. It is easy to realize that the K = 14. In fact, the four rigid bars are hinged to B. Each of these constraints eliminates the possibility for the tip of each bar to translate w.r.t. B. The hinges at E, F , G and H are therefore providing 8 constraints. Moreover, each of the hinges A and B adds 2 constraints to the system, namely the translations in x and y directions are restrained. Finally, the two rollers at C and D only constrain the horizontal component. Therefore, we have that K = 8 + 2 + 2 + 1 + 1 = 14, which yields DOF =3 × 5 - 14 = 1. Note that the presence of the spring is immaterial for the determination of the number of degrees of freedom, as it does not provide any constraint, but rather an internal force. 7-1
Transcript of 7 Kinetics of planar rigid bodies - ETH Zkiranku/Dynamics2017/Files/7/Dynamics-week 7 exercises...

7 Kinetics of planar rigid bodies
L1
L2
L3
L4
BA
BC
DE F
G Hk
7.1 The planar multibody system shown inthe figure consists of 4 rigid bars L1, L2, L3, L4,and a rigid body B. The four bars are hingedon B at the points E, F , G and H. Similarly,the two opposite ends A and B of L1 and L2
are hinged to the ground, while points C andD are able to translate in the vertical direction.A spring of stiffness k connects points F andC, as shown. How many DOF does the systemfeature?
(a ) DOF = 0
(b ) DOF = 1
(c ) DOF = 2
(d ) DOF = 3
(e ) DOF =∞
Solution In order to solve the problem, we need to use the formula
DOF = nL−K, (7.1)
where n ∈ {3, 6} whether the problem is two or three-dimensional, L is the number ofrigid bodies and K is the number of holonomic constraints. In this case, n = 3 andL = 5. It is easy to realize that the K = 14. In fact, the four rigid bars are hinged toB. Each of these constraints eliminates the possibility for the tip of each bar to translatew.r.t. B. The hinges at E, F , G and H are therefore providing 8 constraints. Moreover,each of the hinges A and B adds 2 constraints to the system, namely the translationsin x and y directions are restrained. Finally, the two rollers at C and D only constrainthe horizontal component. Therefore, we have that K = 8 + 2 + 2 + 1 + 1 = 14, whichyields DOF = 3× 5− 14 = 1. Note that the presence of the spring is immaterial for thedetermination of the number of degrees of freedom, as it does not provide any constraint,but rather an internal force.
7-1

7 Kinetics of planar rigid bodies 7-2
G
O v0
g
B
7.2 The planar rigid body B is hinged at (i.e.free to rotate about) point O on a roller, slidingalong a horizontal guide with a prescribed veloc-ity v0. The center of mass of B is denoted byG. Gravity acts downwards, as shown. Whichof the following statements is correct?
(a ) The angular momentum H0 w.r.t. point Ois always conserved.
(b ) The angular momentum H0 w.r.t. point Ois conserved only if |v0| is constant.
(c ) The angular momentum H0 w.r.t. point Ois conserved only if |v0| = 0.
(d ) The angular momentum H0 w.r.t. point Ois conserved if G coincides with O.
(e ) The angular momentum H0 w.r.t. point Ois not conserved under any circumstance.
Solution the angular momentum principle for a rigid body reads
HO + vO × P = M extO , (7.2)
where O is an arbitrary point, not necessarily belonging to the body, P is the linearmomentum of the body, v0 is the velocity of O and M ext
O is the resultant external torquew.r.t. O. Clearly, for the angular momentum to be conserved, it must hold that M ext
O = Oand vO×P = 0. These conditions are only met if the body is hinged at its center of massG. In this case, the gravity force does not generate any torque, and therefore M ext
O = O.Moreover, it further holds that vG = vO and thus vO × P = 0. The correct answer istherefore (d).

7 Kinetics of planar rigid bodies 7-3
7.3 A disk of mass m, radius R andprincipal moment of inertia I rolls down aninclined plane with an inclination angle α.What is the time tf needed for the cylinderto drop a height h, if released with an initialvelocity v0 directed down the incline?
(a ) tf =−v0
R+√
v20R2 + 2 mgh
(I+mR2)
mgR sinα(I+mR2)
(b ) tf =−v0
R−√
v20R2 + 2 mgh
(I+mR2)
I +mR2
(c ) tf =−v0
R+
√v20R2 + 2mgh
I
mgR sinαI
(d ) tf =−v0
R+
v20R2 + 2 mgh
(I+mR2)
mgR sinαI
(e ) tf =−v0 +
√v20 + 2 mgh
(I+mR2)
mgR sinα(I+mR2)
Solution In order to find the time taken by the disk to drop the prescribed height, weneed to derive the equation of motion, and integrate them.
We can apply the angular momentum principlewith respect to the contact point O. Note that thepoint O does not belong to the disk, rather it is apoint on the incline that follows the contact point.In this way, the unknown contact reaction force doesnot enter into the equation. We can conveniently usethe angular momentum transfer formula between thecenter of mass of the disk G and point O, which writes:
HO = HG + P × rGO. (7.3)
since G is the center of mass of the disk, it holds that HG = Iω, where ω = θ. Bysubstituting this in (7.3) and recalling that vO ‖ vG, we can apply the angular momentumprinciple
HO + vO × P = HG + P × rGO = Iωk + (−mRθ)ex × (−R)ey = M extO . (7.4)
For our problem, (7.4) becomes
(I +mR2)θ = −mgR sinα, (7.5)

7 Kinetics of planar rigid bodies 7-4
where we applied the rolling without slipping condition vG = −Rθ. By expressing θ fromthe previous equation, we get
θ = −mgR sinα
(I +mR2), (7.6)
which we can then integrate (7.6) twice with respect to time
θ = −mgR sinα
(I +mR2)t− v0
R(7.7)
and
θ = − mgR sinα
2(I +mR2)t2 − v0
Rt, (7.8)
where the initial conditions θ0 = −v0R
(due to rolling without slipping condition) andθ0 = 0 are considered. From the geometry we know that
x(tf ) =h
sinα. (7.9)
Since the disk rolls without slipping we can write
x = −Rθ. (7.10)
From (7.9) and (7.10) we can easily obtain the total rotation of the disk when it reachesthe bottom of the incline:
θ(tf ) = − h
R sinα. (7.11)
By combining (7.8) and (7.11) we obtain
h
R sinα=
mgR sinα
2(I +mR2)t2f +
v0Rtf
⇒ mgR sinα
2(I +mR2)t2f +
v0Rtf −
h
R sinα= 0 (7.12)
We can finally solve (7.12) for tf
tf =−v0
R+√
v20R2 + 4 mgR sinα
2(I+mR2)h
R sinα
2 mgR sinα2(I+MR2)
=−v0
R+√
v20R2 + 2 mgh
(I+mR2)
mgR sinα(I+mR2)
, (7.13)
where the solution with the negative sign has been excluded, as it brings and unphysicalnegative time value. The correct answer is therefore 1.

7 Kinetics of planar rigid bodies 7-5
↵
g
v0
Ox
r
!0
µRough surface
Cm, IC
7.4 A homogeneous sphere of mass m andradius r is launched down the incline of angleθ with initial velocity v0 and angular velocityω = 0. If the friction coefficient is µ, determinethe velocity vf of the center of mass C whenrolling without slipping is established.Hint: the moment of inertia of a sphere of massm and radius r with respect to an axis passingthrough the center is IC = 2
5mr2.
(a ) vf =5µ(cos θ)v0
7µ cos θ − 2 sin θ
(b ) vf =7µ(cos θ)v0
2µ cos θ + 5 sin θ
(c ) vf =(5µ cos θ + 7 sin θ) v0
7µ(cos θ)
(d ) vf =5µ(sin θ)v0
7µ sin θ − 2 cos θ
(e ) vf =7(cos θ)v0
5 cos θ − 2 sin θ
Solution The reference system is aligned as shown below. The figure also depicts theinitial, sliding-only configuration, and the final configuration, where the rolling withoutslipping condition is established.
The free-body diagram at an intermediate configuration is shown here below.

7 Kinetics of planar rigid bodies 7-6
Clearly, one has to include not only the gravity force but also the reaction force N andthe friction force F
By applying linear momentum principle in the x-direction, we obtain
Px = F extx ⇒ m
dv
dt= mg sin θ − F , (7.14)
where F = µN , during the period of slipping. In order to express N , we apply the linearmomentum principle in the y direction, as
Py = F exty ⇒ 0 = mg cos θ −N ⇒ N = mg cos θ . (7.15)
By substituting (7.15) into (7.14) we obtain
mdv
dt= mg(sin θ − µ cos θ) . (7.16)
By integrating (7.16) with respect to time from t0 to T , we get
T∫0
dv =
T∫0
g(sin θ − µ cos θ)dt ,
vf − v0 = gT (sin θ − µ cos θ) . (7.17)
where vf denotes the magnitude of the velocity at time T .
Next, by applying angular momentum principle w.r.t. the center of mass, we obtain
HC + vC × P = MC . (7.18)
Since vC × P = m(vC × vC) = 0, (7.18) becomes
−ICdω
dtk = −µNrk . (7.19)
By substituting IC = 2/5mr2 and (7.15), we get
2
5rdω
dt= µg cos θ . (7.20)
By integrating (7.20) with respect to time from t0 to T , yields
T∫0
dω =
T∫0
5
2rµg cos θdt⇒ ωf − 0 =
5
2rµg(cos θ)T . (7.21)

7 Kinetics of planar rigid bodies 7-7
We impose now that, at T , the rolling without slipping condition is satisfied, i.e.
ωfr = vf ⇒ ωf =vfr. (7.22)
By substituting (7.22) into (7.21), we get
vf =5
2µg(cos θ)T . (7.23)
By using (7.17) and (7.23), we get the time duration of slipping as
T =2v0
g(7µ cos θ − 2 sin θ). (7.24)
By inserting the expression for T into (7.17), one finally obtains the velocity of the centerof mass C at the end of the slipping period, as
vf =5µ(cos θ)v0
7µ cos θ − 2 sin θ. (7.25)

7 Kinetics of planar rigid bodies 7-8
S
P
P
TS
PP
Fixed ring gear
Planet gears
Sun gear
rS
rP
rR
7.5 Consider the planetary gear systemshown in the figure. The ring gear of radius rRis fixed. The sun gear of radius rS rotates aboutits center of mass at the fixed point S. Its massand centroidal moment of inertia are mS and IS,respectively. The mass and centroidal momentof the planet gears of radius rP are mP and IP .The point P in the figure indicates the center ofmass of the planet gears. If a torque TS is appliedto the sun gear, what is its angular accelerationωS?
(a ) ωS =TSr
2P
ISr2P + r2SIP +mP r2P r2S
(b ) ωS =TSr
2P
4ISr2P + 3r2SIP
(c ) ωS =4TSr
2P
4ISr2P + 3r2SIP + 3mP r2P r2S
(d ) ωS =TS
3ISr2P + 4r2SIP + 3mP r2P r2S
(e ) ωS =4TSr
2P
3mP r2P r2S
Solution We only show one of the planet gears, since the setup for the other two isidentical. We use tangential-normal-binormal coordinates that move with P : t-n-b. Sincethe motion is planar, b = k.

7 Kinetics of planar rigid bodies 7-9
As done in problem 6.2, we establish relations between angular velocities by imposing therolling without slipping condition between objects. The rolling without slipping of theplanet on the ring states that
vC = 0, (7.26)
and therefore, the velocity of point B becomes
vB = vC + ωP × rCA = ωP × rCA. (7.27)
Likewise, the velocity of point A can be expressed as
vA = vS + ωS × rSA = ωS × rSA, (7.28)
by using the velocity transfer formula for the sun gear. We can now apply the rollingwithout slipping condition for the contact point between the sun and the planet gear:
vA = vB ⇒ ωP × rCA = ωS × rSA. (7.29)
Equation (7.29) establishes a relation between the moduli of the two angular velocities,as
ωSrS = −ωP2rP
⇒ ωP = −1
2
rSrPωS (7.30)
and therefore, the angular accelerations are related as
ωP = −1
2
rSrPωS. (7.31)
We introduce constraint forces F , G, as shown below.

7 Kinetics of planar rigid bodies 7-10
We can now apply the angular momentum principle for the planet gear about point C(contact point between the ring and the planet gear) as
(IP +mr2CP )ωP = −2rPFt. (7.32)
We need another equation to eliminate Ft. We can apply then the angular momentumprinciple for the sun gear about its center point, as
ISωS = TS − 3rSFt. (7.33)
We can therefore take Ft from (7.33):
Ft =TS − ISωS
3rS(7.34)
and then substitute (7.34) and (7.31) in (7.32) to obtain the angular acceleration ωS ofthe sun gear, as
ωS =4TSr
2P
4ISr2P + 3r2SIP + 3mP r2P r2S
. (7.35)
The correct answer is answer (c). Note that the normal reaction forces are never appearingin the angular momentum principle, since they do not produce any moment.

7 Kinetics of planar rigid bodies 7-11
7.6 The system shown in the figure con-sists of two masses, m1 and m2, attachedto the ends of a string of length l wrappedaround a pulley1. The pulley is a uniformdisk of radius R and mass M . Let the stringbe taut2, inextensible and massless. More-over, assume that it does not slip on the pul-ley.
1. What is the acceleration x1 of mass m1?
(a ) x1 =m1 −m2
m1 +m2 + 12Mg
(b ) x1 =m1 −m2
m2 + 12Mg
(c ) x1 =m1 +m2
m1 +m2 + 12M
(d ) x1 =m1 −m2
m1 − 12Mg
(e ) x1 =m1
m1 +m2 + 12Mg
2. What is the tension of the string on the left side of the pulley?
(a ) T1 =2m1m2g + 1
2M
m1 +m2 + 12M
(b ) T1 = m1g2m2 + 1
2M
m1 +m2
(c ) T1 =2m2 + 1
2M
g(m1 +m2 + 1
2M)
(d ) T1 = m1gM
m2 + 12M
(e ) T1 = m1g2m2 + 1
2M
m1 +m2 + 12M
3. What is the total energy of the system?
(a ) E =1
2m1x
21 +
1
2m2x
22 −m1gx1 −m2gx2
(b ) E =1
4MR2ω2 −m1gx1 −m2gx2
(c ) E =1
2m1x
21 +
1
2m2x
22 +
1
4MR2ω2 −m1gx1 −m2gx2
1This system is also known as Atwood’s machine2dt.: ”gespannt”

7 Kinetics of planar rigid bodies 7-12
(d ) E =1
4m1x
41 +
1
4m2x
42 +
1
6MR2ω2 −m2gx2
(e ) E =1
2m1x
21 +
1
2m2x
22 +
1
4MR2ω2
Solution I. Geometry, reference system and coordinates
We use the geometry and reference system given in the assignment. The position ofa generic point Q is given by
rQ = xQi+ yQj + zQk, (7.36)
where zQ ≡ 0. Similarly r1 and r2 indicate the position of the two points of the stringattached to m1 and m2, respectively. We then consider x1, x2 and θ as gneralized coordi-nates.
II. Constraints
The length of the string is constant, therefore one can write
x1 + x2 + πR = l = const. (7.37)
Furthermore, the string does not slip on the pulley. This constraint can be written as
x1 = R θ = Rω, or x2 = −R θ = −Rω, (7.38)
where we introduced ω = θ 6= const. .
III. Free-body diagram
When considering the free body diagrams for the blocks and the pulley, we need toinclude also the string tensions T 1, T 2, as shown in the diagram below.
Note that, in general T1 6= T2.
IV. Apply the appropriate principles to derive equations of motion

7 Kinetics of planar rigid bodies 7-13
The linear momentum principle for mass m1 reads
m1r1 = −T 1 +m1g (7.39)
By taking the i-component, we simply get
m1x1 = −T1 +m1g. (7.40)
Equivalently, the linear momentum principle for mass m2 is
m2r2 = −T 2 +m2g, (7.41)
and by taking the i-component we obtain
m2x2 = −T2 +m2g. (7.42)
We can also use the angular momentum principle for the pulley with respect to its centerof mass, which reads
HC = M extC . (7.43)
By using the centroidal moment of inertia IC , the angular momentum HC can be writtenas
HC = IC ω k. (7.44)
The expression for the moment of inertia IC is, in the case of a solid disk
IC =1
2MR2. (7.45)
The external torque M extC is given by
M extC = rCA × T 1 + rCB × T 2
=−Rj × T1i+Rj × T2i=R(T1 − T2) k. (7.46)
Since the problem is planar, the angular momentum principle (7.43) only contains acomponent in the k direction, as
1
2MR2ω = R(T1 − T2) (7.47)
This yields the equation of motion for θ, as
θ ≡ ω =2
MR(T1 − T2). (7.48)
V. Use the constraints to simplify
By differentiating the constraint of constant string length (7.37) twice, one obtains
x1 = −x2. (7.49)

7 Kinetics of planar rigid bodies 7-14
Similarly, by differentiating the no-slip condition (7.38) once we get
x1 = Rθ. (7.50)
To obtain an expression for x1, we add the equations of motion for x1 and −x2, i. e.subtract (7.42) from (7.40), and also immediately replace −x2 using the first constraint(7.49):
(m1 +m2)x1 = −(T1 − T2) + (m1 −m2)g. (7.51)
Even though T1 and T2 are unknown at this point, we may use the equation of motionfor θ (7.48) to write their difference as
T1 − T2 =1
2MR θ. (7.52)
Using the other available equation, i.e. the second constraint (7.50), we get
T1 − T2 =1
2Mx1. (7.53)
By inserting this result into (7.51), we finally obtain
x1 =m1 −m2
m1 +m2 + 12Mg, (7.54)
and therefore also
x2 =m2 −m1
m1 +m2 + 12Mg. (7.55)
The tensions T1 and T2 can be calculated using the original equations of motion (7.40),(7.42) and the results for x1, x2:
T1 =m1g −m1x1 = m1g ·2m2 + 1
2M
m1 +m2 + 12M
= const. , (7.56)
T2 =m2g −m2x2 = m2g ·2m1 + 1
2M
m1 +m2 + 12M
= const. . (7.57)
With the kinetic energy of the pulley being 12ICω
2, and IC = 12MR2, the total energy
of the system becomes
E =1
2m1x
21 +
1
2m2x
22 +
1
4MR2ω2 −m1gx1 −m2gx2. (7.58)
The correct answer is answer (c).
Remark: The sign in the expression for the gravitational potential energy of a mass

7 Kinetics of planar rigid bodies 7-15
depends on the orientation of the coordinate axes. In this case, for say mass m1, we doindeed have
V1(r1) = V1 = −m1gx1,
since
−∇V1 = −∂V1∂x1
i = m1g i
is the correct expression for gravitational force acting on it.

7 Kinetics of planar rigid bodies 7-16
!2
!1
�L RL
OA
B
ex
ey
ez
Rolling without slipping
7.7 A disk of radius R rolls without slippingover a horizontal surface while it rotates aboutan angled shaft which in turn rotates about afixed, vertical axis. The angled arm of the shaftforms and angle β with the horizontal direction.The vertical distance between the contact pointof the disk and the horizontal arm of the shaft ish, while L denotes the length of the horizontalarm. If the shaft is rotating with an angularvelocity of magnitude ω1, what is the angularvelocity vector ω of the disk?
(a ) ω = −ω1L+ L cos β −R sin β
Rcos βex + ω1
(1 +
L+ L cos β −R sin β
Rsin β
)ey
(b ) ω = −ω1L+ L sin β −R cos β
Rsin βex − ω2
(1 +
L+ L sin β −R cos β
Rcos β
)ey
(c ) ω = ω1
(R cos β +
L+ L cos β −R sin β
Rsin β
)ey
(d ) ω = −ω1L cos β
Rcos βex + ω1
(1 +
L cos β −R sin β
Rsin β
)ey
(e ) ω = −ω2L+ L cos β −R sin β
Rcos βex − ω2
(1 +
L+ L cos β −R sin β
Rsin β
)ey
Solution The system consists of two rigid bodies, namely the shaft and the disk. It isimportant to realize here that the angular velocity of the disk is given by two contributions:
• the angular velocity of the shaft, denoted by ω1, and
• the angular velocity of the disk due to the rotation about its own axis, denoted byω2.
both the two vectors are indicated in the figure. The total angular velocity of the disk issimply given by the sum of the two contributions, namely:
ω = ω1 + ω2. (7.59)
In order to establish a relation between the two angular velocites, we use the velocitytransfer formula and impose the rolling without slipping condition.The velocity of pointB is given by
vB = v0 + ω1 × rOB, (7.60)
where we have
vO = 0, ω1 = ω1ey, rOB = L(1 + cos β)ex +R cos βey. (7.61)

7 Kinetics of planar rigid bodies 7-17
Therefore, the velocity of the center of the disk is readily calculated as
vB = −ω1L(1 + cos β)ez. (7.62)
Once vB is known, the velocity of point A (contact point of the disk with the ground) canbe computed with the velocity transfer formula, as
vA = vB + ω × rBA. (7.63)
Note that here, the angular velocity to be considered is ω, and not ω2only! The positionvector rBA is readily given by
rBA = −R sin βex −R cos βey, (7.64)
while the angular velocity ω2 is expressed in components as
ω2 = −ω2 cos βex + ω2 sin βey. (7.65)
By performing the vector product (7.63), we can calculate vA
vA = [ω1(R sin β − L− L cos β) + ω2R)]ez. (7.66)
The rolling without slipping constraint requires that vA = 0. We can thus obtain arelation between the angular velocity magnitudes
ω2 = ω1L+ L cos β −R sin β
R(7.67)
The total angular velocity vector is given by substituting (7.67) into (7.65) and computingthen (7.59):
ω = −ω1L+ L cos β −R sin β
Rcos βex + ω1
(1 +
L+ L cos β −R sin β
Rsin β
)ey.
(7.68)
The correct answer is answer (a).

7 Kinetics of planar rigid bodies 7-18
7.8 Advanced homework problem Considerthe cardan joint introduced during the lecture. De-termine the angular speed ω2 of the driven shaft interms of ω1, α and ψ.
Solution
The angular velocity of the driving shaft can be written as
ω1 =
00
ψ
and the angular velocity of the driven shaft as
ω2 =
0ω2 sinαω2 cosα
.
Since angular velocities are additive, we can write:
ωcross = ω1 + φ = ω2 + γ. (7.69)
Observe that: γ ⊥ φ and ω2 ⊥ γ.Based on these bservations, we can determine the direction of γ.
eγ =φ× ω2
|φ× ω2|=
∣∣∣∣∣∣ex ey ez
cosψ sinψ 00 sinα cosα
∣∣∣∣∣∣ =
sinψ cosα− cosψ cosαcosψ sinα
1√cos2 α + cos2 ψ sin2 α
.
(7.70)
Then γ can be expressed as
γ = γ
sinψ cosα− cosψ cosαcosψ sinα
1√cos2 α + cos2 ψ sin2 α
. (7.71)
For simplicity we introduce the following notation:
γ1 = γ1√
cos2 α + cos2 ψ sin2 α. (7.72)

7 Kinetics of planar rigid bodies 7-19
Now we can write (7.69) component-wise
φ cosψ = γ1 sinψ cosα. (7.73)
φ sinψ = ω2 sinα− γ1 cosψ cosα. (7.74)
ω1 = ω2 cosα + γ1 cosψ sinα. (7.75)
We have now a system of equations with 3 equations and 3 unknowns. From (7.73) wecan express φ as
φ = γ1sinψ
cosψcosα. (7.76)
Substituting (7.76) into (7.74), we get
γ1sin2 ψ
cosψcosα = ω2 sinα− γ1 cosψ cosα, (7.77)
which can be written as
γ1
[sin2 ψ
cosψcosα + cosψ cosα
]= ω2 sinα, (7.78)
γ1
[sin2 ψ + cos2 ψ
cosψcosα
]= ω2 sinα, (7.79)
γ1cosα
cosψ= ω2 sinα. (7.80)
Inserting (7.79) into (7.75), we finally obtain the ratio between the angular velocity of thedriving and the driven shaft
ω2 =ω1 cosα
cos2 α + sin2 α cos2 ψ. (7.81)