525307 Mechanical Vibrationeng.sut.ac.th/me/2014/document/MechanicalVibration/Vibration B1.pdf · 3...
53
525307 Mechanical Vibration
Transcript of 525307 Mechanical Vibrationeng.sut.ac.th/me/2014/document/MechanicalVibration/Vibration B1.pdf · 3...

525307 Mechanical Vibration

2
Week 1-6 Introduction to mechanical vibrations SCE Lab
Free vibration SDOF Monday, B3101
Undamped system 08.00-10.00
Damped system Wednesday, B2104
Logarithmic decrement 08.00-10.00
MATLAB&Simulink application
Force vibration SDOF
Undamped system
Force vibration SDOF
Undamped/Damped system
Base excitation
Rotating unbalance
General force response
Spectrum analysis
Force vibration SDOF
Frequency responses
Free vibration MDOF
Undamped system
Mode Shapes, Nodes

3
Free vibration MDOF
Modal analysis
Damped system
Force vibration MDOF
Undamped /Damped system
Stability analysis
15 January 2019 Midterm Examination : Mechanical Vibration 9.00 - 11.00
Week 8 -11 Continuous systems using Solidworks Monday, B3101
Transverse vibration of a string 08.00-10.00
Longitudinal vibration of a rod Wednesday, B2104
Torional vibration of a rod 08.00-10.00
Lateral vibration of a beam
Vibration measurement
Vibration Control & Analysis
Static balance /Critical speed
Isolator design
Absorber design
Vibration analysis for CBM
1 March 2019 Final examination : Mechanical Vibration 09.00-12.00

4
4
• A 80-100• B+ 75-79• B 70-74• C+ 60-69• C 50-59• D+ 45-49• D 40-44• F 0-39
Midterm Exam: 30
Final Exam: 30
Vibration modeling of MDOF using Simulink test:15
Continuous system using SolidWorks test: 15
Home work, Quiz , Classroom: 20

55
Recommended reading : Mechanical Vibrations, Srisertpol, 2014 Daniel J.Inman:Engineering Vibration,Third Edition,Pearson Education,2008 Leonard Meirovitch : Fundamentals of Vibrations , Mc-Graw Hill 2001. Kelly S. Graham : Fundamentals of Mechanical Vibrations,
Mc-Graw Hill 2000.
Textbook: Singiresu S.Rao : Mechanical Vibration(Fourth Edition), Prentice Hall 2004. SI Edition

The Spring-Mass-Damper model
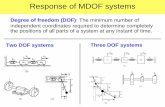
Degree of Freedom (DOF)
Relationship between Displacement, Velocity and Acceleration
Representations of harmonic motion
Classification of mechanical vibration

7School of Mechanical Engineering 7

8School of Mechanical Engineering 8

9

10

11

12

13

14

15
ล ำดบัขัน้ควำมเป็นอิสระ (Degree of Freedom, DOF) - จ ำนวนพิกดั(Coordinate) ท่ีน้อยท่ีสดุท่ีไม่ขึน้ต่อกนัซ่ึงจ ำเป็นต้องใช้อธิบำยต ำแหน่งต่ำงๆ ของทุกส่วนในระบบท่ีขณะเวลำหน่ึง

16

17

18

19

20
Discrete System (Lumped System) Continuous System (Distributed System)

21
การสัน่แบบอสิระ (Free Vibration) การสัน่แบบบงัคบั (Forced Vibration) การสัน่แบบไมม่คีวามหน่วง (Undamped Vibration) การสัน่แบบมคีวามหน่วง (Damped Vibration) การสัน่แบบเชงิเสน้ (Linear Vibration) การสัน่แบบไมเ่ชงิเสน้ (Nonlinear Vibration) การสัน่แบบก าหนดได้ (Deterministic Vibration) การสัน่แบบสุม่ (Random Vibration)

22

23

24
kxF
stiffness springor contant springk
tion)nt(deformadisplacemex
2
2
1 :spring in theenergy Potential kxU

25
where
equation mEquilibriu
21
21
kkk
kW
kkW
eq
steq
stst
neq
eq
kkkkk
k
321
parallelin constant spring Equivalent

26
21 system theof Static 1. stst
22
11
equation mEquilibriu 2.
kW
kW
steqeq kWk deflection static same for the .3
neq
eq
kkkkk
k
11111
seriesin constant spring Equivalent
321
, or
2
2
1
1
2211
k
k
k
k
kkk
steqsteq
steq
21
111 is, that
kkkeq

27
cm 2ddiameter wire
cm 20Ddiameter coilmean
mN 1080G modulusshear 29
The stiffness of helical spring is given by
mN 000,4052.08
108002.0
83
94
3
4
nD
Gdk
The equivalent spring constant of the suspension system is given by
mN 120,000 000,4033 kkeq

28
ตวัหน่วงเน่ืองจากความหนืด ตวัหน่วงเนื่องจากแรงเสียดทานระหวา่งของแข็งกบัของแข็ง
ตวัหน่วงเน่ืองจากความไมย่ืดหยุน่ของวสัด ุ

29

30
All real systems dissipate energy when they vibrate. To
account for this we must consider damping. The most simple
form of damping (from a mathematical point of view) is called
viscous damping. A viscous damper (or dashpot) produces a
force that is proportional to velocity.
Damper (c)
( ) ( )cf cv t cx t x
fc
Mostly a mathematically motivated form, allowing
a solution to the resulting equations of motion that predicts
reasonable (observed) amounts of energy dissipation.

31
neq
eq
cccc
c
1111
seriesin constant damping Equivalent
21
321
parallelin constant damping Equivalent
cccc
c
eq
eq

32

33

34
มวลเทียบเท่ำของล้อมวลเทียบเท่ำของสปริง

35

36

37
กฎการเคลือ่นทีข่องนิวตนั กฎการอนุรกัษ์พลงังาน
สมการลากรานส ์

38
การแกส้มการอนุพนัธ์ การเปลีย่นรปูของลาปลาซ วธิเีชงิตวัเลข
Dynamic System Modeling and Analysis, Hung V Vu and Ramin S. Esfandiari,
McGraw-Hill 1998

39
◦
◦

40

41
Simple model• Single-degree of freedom model as shown in b.
stiffness. equivalent,, srteq kkkk
constant. damping equivalent, rseq ccc
mass equivalent,, wvreq mmmm
wheels, body, vehicle, struts tires,,rider wvstr

42
wheels, body, vehicle, struts tires,,rider wvstr

43
wheels, body, vehicle, struts tires,,rider wvstr

44
wheels, body, vehicle, struts tires,,rider wvstr

การเคลือ่นทีแ่บบฮารโ์มนิกสอ์ยา่งงา่ย
รปูแบบของฟังกช์ัน่ฮารโ์มนิกส์
การสัน่ทีม่ขีนาดแบบเอก็โปแนนเชยีล
45

46

47
2 2
Displacement: ( ) sin
Velocity: ( ) cos sin2
Acceleration: ( ) sin sin
y t A t
y t A t A t
y t A t A t

48
0 1 2 3 4 5 6 7 8 9 10-20
-15
-10
-5
0
5
10
15
20
Time,(sec)
Displacement
Velocity
Acceleration

49

50
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T, sec
T=1 sec
T= 0.5 sec
T= 2 sec

51
0 2 4 6 8 10 12 14
-0.4
-0.2
0
0.2
0.4
0.6
Time, (sec)
y(t
)
0 2 4 6 8 10 12 14-800
-600
-400
-200
0
200
400
600
Time, (sec)
y(t
)
Stable system
Unstable system

52

Degree of freedom
Types of vibration motion
Elements of Mechanical system Mass, Inertia
Damper
Spring
Vibration analysis procedure
Mathematical model
Simple harmonic motion
53