4.imimg.com...9 5 0 ! ! 3 ) :[ Yt [ 0 \ _W EDT¡FJE DVFDEBTO¢JNFGJBTO ET£GBH EDLGLFJE...
221
Sparex India Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india
Transcript of 4.imimg.com...9 5 0 ! ! 3 ) :[ Yt [ 0 \ _W EDT¡FJE DVFDEBTO¢JNFGJBTO ET£GBH EDLGLFJE...

Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Preface
1
Preface
Thank you for using ALPHA6000S, ALPHA6000V, ALPHA6700S series inverters.
This series of inverters adopt the most advanced inverter current vector control technology,low-speed rated torque output, ultra-quiet and stable operation and built-in or external PGfunctions, can easily achieve closed-loop control. They are characterized by diverse controlmodes, up to 36 perfect protection and alarm functions, on-line monitoring and on-lineadjustment of a variety of parameters, built-in RS-485 communication interface, flexibleoperation, and can satisfy various needs of users. Available extension card can meet the users'needs of system extension.
This series of inverters apply to most motor drive applications, including paper making, spinningand weaving, food, cement, printing and dyeing, plastic machinery, metallurgy, steel and otherindustries. As speed controllers, this series of inverters possesses good adaptability of load,running stability, high precision and good reliability. They can improve the power factor andefficiency, and be used as a power-efficient application.
If you have some problems that can’t be solved in operation, please contact the nearest localagents, or contact our company directly.
To ensure the perfect use of this product and the safety of users, please read the user manualcarefully before the operation of inverter and keep the manual in proper place for futurereference
The information contained in this manual is subject to change without notice.
Before mounting, commissioning and using the inverter, it strongly suggested that you must readthe safety rules warnings listed in this book and cautions marked on the inverter to ensure yoursafety and extending the life of this equipment,. When in operation, we must pay attention to thesituation of load and all notes that related on safety
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Foreword
2
Danger! This equipment contains dangerous voltage ,Not accord with the
warning or breach this manual operation. Electric shock can causeserious or fatal injury. Only qualified personnel shall wire the drive.
Please cut off the power before wiring and inspecting. It is notpermissible to touch PCB or interior components before battery controllamp goes off or until 5 minutes after the power has been removed. It isnecessary to use meters to confirm the charging capacitor has dischargedoff. Otherwise, a risk of electric shock may happen.
Don't contact AC power source to the output terminals U, V, W of theinverter. When using the inverter, the earthing terminal of the invertermust be grounded correctly and reliably according to IEC electricalsafety regulation.
Warning! Unauthorized change of inboard wiring and using accessories, which
sold or recommended by blame manufacturer may cause fire, electricshock and injury.
Since body static electricity may cause serious damage to MOSfield-effect transistor and other sensitive elements please don’t touch theinterior devices, such as PCB, IGBT module etc. before any measure istook to prevent static electricity.
Caution!
Keep all marks and labels are clear to read. Replace the lost or wornmark at any moment.
Please keep the user manual near the inverter that can be reached easilyand give this manual to the users who use the product.
All rights reserved. The contents in this document are subject to change without notice. Ifyou have any questions and problems about the use of our products, please contact ouragents or us. Any improved suggestions are welcome.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Table of Contents
3
ContentsPreface..............................................................................................................................................1
Chapter 1 Purchase Inspection.........................................................................................................61.1 Unpacking Inspection..................................................................................................... 61.2 Naming Rule................................................................................................................... 61.3 Nameplate of Inverter..................................................................................................... 7
Chapter 2 Installation and Wiring....................................................................................................82.1 External Dimension and Installation Dimension (See Appendix 1)............................82.2 Mounting Place Requirements and Management........................................................... 8
2.2.1 Installation Location................................................................................................ 82.2.2 Ambient Temperature.............................................................................................. 92.2.3 Preventive Measures................................................................................................ 9
2.3 Installation Direction and Space..................................................................................... 92.4 Main Circuit Wiring......................................................................................................10
2.4.1 The Main Circuit Terminals Arrangement and wiring.......................................... 102.4.2 Main Circuit Wiring operation...............................................................................14
2.5 Control Circuit Connection...........................................................................................152.5.1 Function of Control Circuit Terminals.................................................................. 152.5.2 Wiring of control circuit terminals........................................................................ 19
2.6 Wiring of Inverter for Basic Operation.........................................................................282.7 Matters Needing Attentionon Wiring.......................................................................... 32
Chapter 3 Operation.......................................................................................................................333.1 Function and operation of keypad.................................................................................33
3.1.1 Keypad layout........................................................................................................ 333.1.2 Description of button function............................................................................... 343.1.3 Description of LED digitals and indicators........................................................... 353.1.4 Display state of keypad..........................................................................................363.1.5 Operation method of keypad..................................................................................38
3.2 Run command mode select........................................................................................... 403.3 Trial Operation..............................................................................................................40
3.3.1 Operation mode of inverter....................................................................................403.3.2 Check points before running..................................................................................413.3.3 Check points time during running..........................................................................413.3.4 Operation of initial power on.................................................................................433.3.5 First test run operation........................................................................................... 44
3.4 Commissioning of keypad............................................................................................ 463.5 Operation of Control Circuit Terminal......................................................................... 46
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Table of Contents
4
Chapter 4 Parameter Index.............................................................................................................48
Chapter 5 Detailed Function Introductions....................................................................................905.1 Basic Function (Group P0)........................................................................................... 905.2 Start/Stop Control (Group P1)...................................................................................... 945.3 Auxiliary Operation (Group P2)................................................................................. 1035.4 I/O Terminal Ctrl (Group P3)..................................................................................... 1085.5 Analog and pulse function (Group P4)....................................................................... 1255.6 PLC Operating (Group P5)......................................................................................... 1295.7 Cut-to-length Function and Wobble Frequency Operating (Group P6)..................... 1345.8 PID Control (Group P7)..............................................................................................1395.9 Vector control mode(Group P8)................................................................................. 1425.10 V/F Control (Group P9)............................................................................................ 1465.11 Motor Parameters (Group PA)..................................................................................1505.12 MODBUS Communication (Group Pb)....................................................................1535.13 Display Control (Group PC)..................................................................................... 1545.14 Protection and Fault Parameters (Group Pd)............................................................ 1585.15 Running History Record (Group PE)........................................................................1645.16 Protection of parameters (Group PF)........................................................................165
Chapter 6 Troubleshooting.......................................................................................................... 1686.1 Troubleshooting.......................................................................................................... 1686.2 Warning display and explanation................................................................................1726.3 Motor’s faults and corrective measure........................................................................172
Chapter 7 Peripheral Equipment..................................................................................................1757.1 Peripheral Equipment Connection Diagrams..............................................................1757.2 Function of Peripheral Equipment.............................................................................. 177
7.2.1 AC Input Reactor................................................................................................. 1777.2.2 EMI Filter.............................................................................................................1787.2.3 Braking Unit and Braking resistor....................................................................... 1787.2.4 Leakage Protector................................................................................................ 1797.2.5 Capacitor Box...................................................................................................... 180
Chapter VIII Maintenance........................................................................................................... 1818.1 Inspection and Maintenance....................................................................................... 181
8.1.1 Daily Inspection................................................................................................... 1818.1.2 Regular Maintenance........................................................................................... 1828.1.3 Regularly-replaced Elements............................................................................... 184
8.2 Storage and Protection................................................................................................... 185
Chapter IX Quality guarantees.....................................................................................................186
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Table of Contents
5
Appendix 1 External Dimension and Installation Dimension(Unit: mm)................................ 187
Appendix 2 Technical Specifications....................................................................................... 195
Appendix 3 Recommendation for Selection of the Main Circuit Output Cable.......................197
Appendix 4 Use of MODBUS Communication....................................................................... 198
Appendix 5 Keypad Installation Dimension (Unit: mm)..........................................................212
Appendix 6 LCD Keypad Use Instruction................................................................................214A6.1 LCD Keypad Instruction..........................................................................................214A6.2 LCD Use Instruction................................................................................................ 214A6.3 LCD Contrast Adjustment....................................................................................... 218
Appendix 7 Frequency Inverter Warranty Card....................................................................... 219
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 1 Purchase Inspection
6
Chapter 1 Purchase Inspection
1.1 Unpacking InspectionAll inverters have passed the strict tests before delivery. After unpacking, please check if the product was damagedby careless transport, the product specification, and model is complied with the order, and if it has a quality checkpassed mark. If there is any problem, please contact the supplier.
1.2 Naming RuleThe naming rule of the product is as following
ALPHA6000S - 3 7R5 G B - X
附加说明
X:标准机型带底座
V:标准机型壁挂式
空:窄体机型
附加说明
B:带制动单元
空:无制动单元
适用负载
G:泛用型
适配电机功率
R75:0.75KW
7R5: 7.5KW
075: 75KW
额定电压
2:3相220V
3:3相380V
系列代号
ALPHA6000S
ALPHA6700S
ALPHA6000V
Bottom-level modules of ALPHA6000S and ALPHA6700S series inverters are high performance motorcontrol modules, which contain three control modes, i.e. V/F, sensorless vector control (SVC), V/Fseparation.
Bottom-level modules of ALPHA6000V series inverters are high performance motor control modules, whichcontain four control modes, i.e. V/F, sensorless open-loop vector control (SVC), speed sensor closed-loopvector control (VC) and V/F separation.
Notes: 1. If the user has special needs, please specify the technology requirement in the order.2. -X rule applies to 160KW-500KWmodels.
Series code Rated voltage Power of motor Suitable load Additional information Additional information
2:3-phase 220V
3:3-phase 380V
G: Generalpurpose
B: With brake unit
Blank: No brake unit
X: Standard model with base
V: Wall type standard model
Blank: narrow-body model
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 1 Purchase Inspection
7
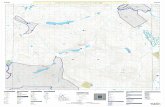
1.3 Nameplate of InverterOn the right side of the bottom plate of inverter, there is a nameplate, which marks the model and rated value ofinverter. See the following Figure:
Inverter model
Adaptive motor model
Rated input voltage, current,frequencyRated output voltage, current,frequency
Barcode information
Production date
ALPHA6000S Series Nameplate of Inverter
Notes: Nameplates of ALPHA6000S series inverters are similar with those of ALPHA6000V series inverters.After unpacking, check whether the nameplate of the drive is consistent with the demand, if it is inconsistent,contact the dealer or the supplier.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
8
Chapter 2 Installation andWiring
2.1 External Dimension and Installation Dimension (See Appendix1)
2.2 Mounting Place Requirements and Management
·Don’t carry the inverter by its cover. The cover cannot support the weight of the inverter and may drop.
·Please install the inverter on a strong support, failing which the inverter may fall off.
·Don’t install the inverter in places where water pipes may leak onto it.
·Don’t allow screws, washers and other metal foreign matters to fall inside the inverter, otherwise there is adanger of fire or damage.
·Don’t operate the inverter if parts are not complete, otherwise there is a danger of fire or human injury.
·Don’t install the inverter under direct sunshine; otherwise, it may be damaged.
·Don’t short circuit PB, + and -, otherwise there is a danger of fire or the inverter may be damaged.
·Cable lugs must be connected to main terminals firmly.
·Don’t apply supply voltage (AC 220V) to control terminals except terminals TA, TB, TC.
Please mount the inverter as following application occasions and maintain appropriate condition
2.2.1 Installation Location
The installation location should meet the following conditions:
Good indoor ventilation
Ambient temperature: -10 °C ~ 40 °C. If the temperature is higher than 40 °C, the inverter should be forcedventilation is required and derating used.
Humidity should be lower than 95%, no condensing and rain water drops.
Do not mount the inverter on the timber or other combustible matters.
Avoid direct sunlight.
It is strictly prohibited to install the inverters in places where have flammable, explosive, corrosive gases orliquids;
Mount in the location free of dust, metal powder, corrosive gas or combustible gas.
The installation foundation should be solid and free of vibration.
No electromagnetic interference, away from source of interference.
Attention
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
9
Derating use must be considered when the inverter is installed at high altitude, greater than 1000 m. This isbecause the cooling effect of inverter is deteriorated because of the thin air. Derating 6% per 1000 m higher ofthe altitude.
2.2.2 Ambient Temperature
In order to enhance operating reliability of the inverter, be sure where the inverter mounted has a good ventilation;when the inverter is used in a closed case, cooling fans or an air-conditioning must be installed to keep the ambienttemperature below 40℃
2.2.3 Preventive Measures
Installing the inverter, please set a shield to prevent metal debris falling into it, and remove the shield after installing.
Please remove the protection membrane when the ambient temperature is over 40° C or the internal temperature istoo high due to other reasons. Please pay attention to avoid small parts falling into the inverter.
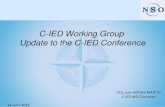
2.3 Installation Direction and SpaceInverters of this series are all equipped fans for forced cooling. In order to be an effective cooling cycle, the invertermust be mounted in the vertical direction, up, down, left and right away from adjacent articles or baffle (wall)maintain adequate space, as Figure 2-1
Figure 2-1 Installation Direction and Space
Greaterthan 50mm
Greaterthan 50mm
Greater than120mm
Greater than120mm
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
10
2.4 Main Circuit Wiring2.4.1 The Main Circuit Terminals Arrangement and wiring
Fig. 2-2 Wiring of terminals of major loops of S2R4GB ~ S2R75GB models
Table 2-1 Function and description of terminals of major loops of S2R4GB~S2R75GB
Terminalsymbol Terminal name and function
L.N Single-phase AC 220V input terminal+.PB Reserved terminals for an external braking resistorU.V.W Three-phase AC output terminals
PE Protective earth terminals for input power or shield earth terminals for motor cable andbraking resistor cables
Fig. 2-3 Wiring of terminals of major loops of S21R5GB ~ S22R2GB models
Table 2-2 Function and description of terminals of major loops of S21R5GB ~ S22R2GB models
Terminal symbol Terminal name and functionL.N Single-phase AC 220V input terminal+.PB Reserved terminals for an external braking resistor- DC negative bus output terminalsU.V.W Three-phase AC output terminals
PE Protective earth terminals for input power or shield earth terminals for motor cable andbraking resistor cables
Input power Braking resistor Electric motor Ground wire
Input power Braking resistor Electric motor Ground wire
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
11
Fig. 2-4 Wiring of terminals of major loops of 3R75GB ~ 3004GB models
Table 2-3 Function and description of terminals of major loops of 3R75GB~3004GB
Terminal symbol Terminal name and functionR.S.T Three-phase AC 380V input terminal+.PB Reserved terminals for an external braking resistor- DC negative bus output terminalsU.V.W Three-phase AC output terminals
PE Protective earth terminals for input power or shield earth terminals for motor cable andbraking resistor cables
Fig. 2-5 Wiring of terminals of major loops of 35R5GB ~ 3015GB models
Table 2-4 Function and description of terminals of major loops of 35R5GB~3015GB
Terminal symbol Terminal name and functionR.S.T Three-phase AC 380V input terminalP1.+/B1 Reserved terminals for an external DC reactor+/B1.B2 Reserved terminals for an external braking resistor- DC negative bus output terminalsU.V.W Three-phase AC output terminalsPE Protective earth terminals for input power or shield earth terminals for motor cable and
Input power Braking resistor Electric motor Ground wire
Reactor Brakingresistor
Electric motor
PE conductorcore and shieldlayer
Input power
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
12
braking resistor cablesNotes: When a DC reactor is not connected, the supplied short circuit sheet should be short-circuited with "P1" and"+ / B1"
Fig. 2-6 Wiring of terminals of major loops of 3018G ~ 3132G models
Table 2-5 Function and description of terminals of major loops of 3018G~3132G
Terminal symbol Terminal name and functionR.S.T Three-phase AC 380V input terminalP1.+ Reserved terminals for an external DC reactor- DC negative bus output terminalsU.V.W Three-phase AC output terminals
PE Protective earth terminals for input power or shield earth terminals for motor cable andbraking resistor cables
Notes: When DC reactor is not connected, please short “P1” and “+/B1” with supplied copper bar.
Input power
Braking unit
Brakingresistor
Reactor Motor
PE conductorcore and shieldlayer
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
13
Fig. 2-7 Terminals of major loops of 3160G ~ 3355G models
Fig. 2-8 Terminals of major loops of 3400G ~ 3500G models
Table 2-6 Function and description of terminals of major loops of 3160G~3500G
Terminal symbol Terminal name and functionR、S、T Three-phase AC 380V input terminalP1、+ Reserved terminals for an external DC reactor
- DC negative bus output terminalsU、V、W Three-phase AC output terminals
PE Protective earth terminals for input power or shield earth terminals for motor cable andbraking resistor cables
Upper wiring board Lower wiring board
Input power
Braking unit(external, optional)
Braking unit(external, optional)
Reactor (built-in,standard)
Electric motor
Upper wiring board Lower wiring board
Input power
Braking unit(external, optional)
Braking unit(external, optional)
Reactor (built-in,standard)
Electricmotor
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
14
Notes: When a DC reactor is not connected, the supplied short circuit sheet should be short-circuited with "P1" and"+"
2.4.2 Main Circuit Wiring operation
When the motor is running, please make sure if it is in positive rotation while the motor receives positive rotationcommand. If the motor is in reverse rotation, the rotation direction of the motor can be changed by exchanging anytwo wires of output terminals (U, V, and W) of the inverter. The rotation direction can also be changed by modifyingthe function code P2.37 to change the phase sequence of the motor.
Do not mistakenly connect the input power cable to the output terminal; otherwise the components in the inverterwill be damaged. Output terminals are prohibited to be grounded. The lines should not be collided with theenclosure, or short connected; otherwise the inverter will be damaged.
Earth terminal PE must be grounded. 380V class grounding resistance should be 10Ω or less. The earth wire shouldnever share with electric welder or power equipment. The earth wire should be of conductor diameter specified in thetechnical standard for electrical equipment, and should be as close to the ground point as possible. On occasionsusing more than two inverters at the same time, please do not form the earth wire into ring circuit. Proper groundingmethod and incorrect grounding method are shown in Fig. 2-9.
Inverter InverterRight
Inverter InverterInverterWrong
Inverter
Figure 2-9 Earthing Connection Method
Notes: The neutral point of motor using Y connection can’t be connected to earth.
Since the inverter output PWM wave, if a capacitor for improving power factor or a lightning varistor is installed onthe output side, which would case tripping or damage to parts, be sure to remove it.
If a contactor or other on-off part is needed to be installed between the output and the motor, be sure the on-offoperation is done when the inverter has no output, otherwise the inverter would be damaged.
Countermeasures to conduction interference: To inhibit conduction interference of the output, besides installingnoise filter and using shielded motor cables, leading all the output cables to earthing metal tube is also a method.Make the distance between the output cables and the control signal cables greater than 30 cm, the effect ofconduction interference will obviously decrease too.
Countermeasures to RFI: The input cables, output cables and the inverter itself would produce RFI. Placing noisefilters both at input and output sides, and shielded with metal shell would reduce RFI. The cables between theinverter and the motor should be as short as possible. Measure to reduce RFI is shown as Figure 2-10.
Powersupply
NoiseFilter
InverterNoiseFilter
Motor
Metal tube
Metal shell box
Figure 2-10 Method to Restrain RFI
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
15
The longer the distance between the inverter and the motor, the higher the carrier frequency would be, and thegreater the high harmonic leakage current of the cables would be. Leakage current has a negative impact to invertersand Equipment nearby, so reduce leakage current as little as possible.
The relationship of the distance between the inverter and the motor and carrier frequency is shown as Table 2-7
Table 2-7 Distance between the inverter and the motor and carrier frequency.
Distance between inverter and motor Below 50m Below 100m Above 100mCarrier frequency Below 8 kHz Below 4 kHz Below 2 kHz
2.5 Control Circuit Connection2.5.1 Function of Control Circuit Terminals
Fig. 2-11 Terminal arrangement of control loop of S2R4GB ~ 3004GB models
10V
AI3
AO2
AI2
GNDAO1
GND
X6
485-
X5
485+
X4
24V
X3
PLC
X2
COMDOY1
TA
CME
TB TC
COM
X1
AI1
Fig. 2-12 Terminal arrangement of control loop of 35R5GB and above models
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
16
X10
COM1
X9
COM1
X8X7
24V1 CME1
BRA
Y2
BRB BRC
Y3PLC1
Fig. 2-13 Terminal arrangement of extension board (optional for 35R5GB and above models)
In order to reduce interference and attenuation of control signal, the length of control cables should be limitedin 50m and away from power cables for more than 30cm. Avoid control wire and power wire being parallel. Try touse STP (Shielded Twisted Pair) to connect analog input and output signal.
Table 2-8 Function of control circuit terminalsCategory
Terminallabel Name Description of terminal
function Specification
Ana
log
inpu
t
AI1 Analog input 1 Receive voltage/current input.Voltage and current areselected by toggle switchesSW1, SW3, SW4. The rangespan of factory default inputvoltage is shown ininstructions in function codeP4.00 ~ P4.10 and P4.16 ~P4.20.
Range of AI1, AI2 input signals:0~10V or 0~20mA
Range of AI3 input signal:-10~10V or -20~20mA
The input impedance is 30kΩ whileinputting voltage signal. The inputimpedance is 250Ω while inputting thecurrent signalReference ground: GND
AI2 Analog input 2
AI3Analog input 3(Only for 35R5GBand above)
Ana
log
outp
ut
AO1 Analog output 1
Provide analogvoltage/current output. Itrepresents 14 magnitudes.The output voltage andcurrent are selected by switchSW2. The factory defaultinput voltage is shown ininstructions in function codeP4.21. Current output range: 0/4 ~ 20mA
Voltage output range: 0/2 ~ 10V
Reference ground:
AO2Analog output 2(Only for 35R5GBand above)
Provide analogvoltage/current output. Itrepresents 14 magnitudes.The output voltage andcurrent are selected by switchSW5. The factory defaultinput voltage is shown ininstructions in function codeP 4.22.
AO3 Reserve Reserve
Com
mun
ica
tion 485+ RS485
communicationinterface
485 differential signalpositive terminal
Standard RS-485 communicationinterface,Not isolated to GNDPlease use twisted pair or shieldedcable
485- 485 differential signalnegative terminal
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
17
Category
Terminallabel Name Description of terminal
function SpecificationM
ulti-
func
tion
inpu
tter
min
al
X1 Multi-function inputterminal 1
It can be defined as amulti-function on-off inputterminal throughprogramming, please seeSection 5.4 of Chapter VFunction Description of InputTerminals of I/O TerminalControl (Group P3) fordetails.X3 can be used as an ordinarymulti-function terminal forS2R4GB ~ 3004GB seriesinverters, it can also beprogrammable and used as aninput port of high speedpulse; but it can only be usedas an ordinary multi-functionterminal for 35R5GB ~3500G series inverters.
Opto-coupler isolation inputInput impedance R = 3.9kΩMaximum input frequency:
200Hz (ordinary IO)50KHz (high-speed pulse)
Input voltage range: 0~30V
Common port: PLCReference ground: COM
COM
+24V
X1-X6
PLC +5V
24V
R
X2 Multi-function inputterminal 2
X3 Multi-function inputterminal 3
X4 Multi-function inputterminal 4
It can be defined as an inputport of high-speed pulsethrough programming, pleasesee Section 5.4 of Chapter VFunction Description of InputTerminals of I/O TerminalControl (Group P3) fordetails.X6 is exclusive for 35R5GBand above models.
X5 Multi-function inputterminal 5
X6 Multi-function inputterminal 6
Mul
ti-fu
nctio
nin
putt
erm
inal
X7 Multi-function inputterminal 7
It can be defined as amulti-function on-off inputterminal throughprogramming, please seeSection 5.4 of Chapter VFunction Description of InputTerminals of I/O TerminalControl (Group P3) fordetails.X7 ~ X10, located on IOextension board, areextension terminals,and are exclusive for35R5GB and above models.
Opto-coupler isolation inputInput impedance R = 3.9kΩMaximum input frequency: 400HzInput voltage range: 0~30VCommon port: PLC1Reference ground: COM1
COM1
+24V
X7-X10
PLC1 +5V
24V
R
X8 Multi-function inputterminal 8
X9 Multi-function inputterminal 9
X10 Multi-function inputterminal 10
Mul
ti-fu
nctio
nou
tput
DO Open collector outputterminal
It can be defined as amulti-function outputterminal for pulse signalthrough programming. It canalso be used as an on-offoutput terminal. Section 5.4of Chapter V FunctionDescription of OutputTerminals of I/O TerminalControl (Group P3).
Opto-coupler isolated open collectoroutput.Range of operating voltage: 0V~26VMaximum output current: 50mARange of Output frequency: 0~50KHz
Reference ground: COM
Y1 Open collector output It can be defined as a Opto-coupler isolated open collector
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
18
Category
Terminallabel Name Description of terminal
function Specification
Y1 multi-function on-off outputterminal throughprogramming, please seeSection 5.4 of Chapter VFunction Description ofOutput Terminals of I/OTerminal Control (Group P3)for details.
outputRange of operating voltage: 0V~26VMaximum output current: 50mA
Y terminals are exclusive for 35R5GBand above models. Y1 is a controlboard terminal with the common portof CME, Y2 ~ Y3, located on theextension board, are extensionterminals with the common port ofCME1.
Y2 Open collector outputY2
Y3 Open collector outputY3
Rel
ayou
tput
TA
Relay output
It can be defined as amulti-function relay outputterminal throughprogramming, please seeSection 5.4 of Chapter VFunction Description ofOutput Terminals of I/OTerminal Control (Group P3)for details.
TA-TB: NC;TA-TC: NO.Contact capacity:250VAC/2A (COSΦ=1)250VAC/1A (COSΦ=0.4)30VDC/1A
TB
TC
BRA
Relay output(exclusive for35R5GB and abovemodels, located on theextension board,extended function)
It can be defined as amulti-function relay outputterminal throughprogramming, please seeSection 5.4 of Chapter VFunction Description ofOutput Terminals of I/OTerminal Control (Group P3)for details.
BRA-BRB: NC;BRA-BRC: NO.Contact capacity:250VAC/2A (COSΦ=1)250VAC/1A (COSΦ=0.4)30VDC/1A
BRB
BRC
Pow
eran
dre
fere
nce
grou
nd
10V +10V power supplyProvide +10V power supplyexternally(Reference ground: GND)
Maximum output current 30 mAOpen circuit voltage can be up to 12V
24V +24V power supplyProvide +24V power supplyexternally(Reference ground: COM)
Maximum output current 200mA
24V1 IO extension board+24 V power
Provide +24V power supplyexternally(Reference ground: COM1)
Maximum output current 200mA
PLC Multi-function inputcommon port
Common port ofmulti-function input terminal
PLC is connected with 24V internallywhile leaving the factory
PLC1Multi-function inputcommon port of IOextension board
Common port ofmulti-function input terminalof IO extension board
PLC1 is connected with 24V1internally while leaving the factory
GND Reference ground of+10 V power supply
Reference ground of analogsignal and +10 V powersupply
Isolated to COM from insideCommon port of +10 V, AI1, AI2, AI3,AO1, AO2, AO3 signals
COM Common port of+24V power supply
Used in conjunction withother terminals
Isolated to GND, and short connectedwith CME while leaving the factory
COM1Common port of+24V power supply ofIO extension board
Used in conjunction withother terminals
Isolated to GND, and short connectedwith CME1 while leaving the factory
CME Common port of Common port of Short connected with COM while
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
19
Category
Terminallabel Name Description of terminal
function Specification
output terminal Y1 multi-function outputterminal Y1
leaving the factoryInternal isolation between CME andGND
CME1
Common port ofoutput terminalsY2~Y3 of IOextension board
Common port ofmulti-function outputterminals Y2~ Y3
Isolated to GND, and short connectedwith COM1 while leaving the factory
PE Shield ground
It is used for grounding ofterminal wiring shield layer.Shield layer of analog signallines, 485 communicationlines, and motor cables can beconnected to this terminal
It is internally connected to connectionterminal PE of major loop
2.5.2 Wiring of control circuit terminals
●Wiring of analog input terminalsAI1/AI2 terminals accept analog signal input, toggle switches SW1 and SW3 select the input voltage (0 ~ 10V) orthe input current (0 ~ 20mA). AI3 (exclusive for 35R5GB and above models) terminals accept analog signal input,toggle switch SW4 selects the input voltage ( - 10 ~ 10V) or the input current (-20 ~ 20mA). The wiring of terminalsis shown in Fig. 2-14:
AI1/AI2 0-10V/0-20mAAI3 -10-10V/-20-20mA
AI1 AI2 AI3
GND PE
Near-end of shieldline is grounded
I
V
SW1/SW3/SW4
Inverter
Fig. 2-14 Wiring diagram of analog input terminals
●Wiring of analog output terminalIn S2R4GB ~ 3004GB, analog output terminal AO1 external connecting analog meter can indicate a variety ofphysical quantities. Slide switch SW2 selects the output voltage (0/2 ~ 10V) or the output current (0/4 ~ 20mA). Thewiring of terminals is shown in Fig. 2-15:
Fig. 2-15 Wiring diagram of S2R4GB~3004GB analog output terminals
Inverter
Near-end of shield line isgrounded
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
20
In 35R5GB and above models, analog output terminal AO1 /AO2 external connecting analog meter can indicate avariety of physical quantities. Slide switch SW2/SW5 select the output voltage (0/2 ~ 10V) or the output current (0/4~ 20mA). The wiring of terminals is shown in Fig. 2-16:
A01 AO2
0/2-10V
0/4-20mA
AO1 A02
GNDPE
Near-end of shieldline is grounded
I
V
SW2/SW5
Inverter
Fig. 2-16 Wiring diagram of analog output terminals for 35R5GB and above models
Tips
1) Dialing SW1, SW2, SW3 SW4 SW5to “I” represents current, dialing to “V” represents voltage.2) Analog input and output signals are easily disturbed by exterior environment, so shielded cables must be used
for wiring and the length of the cables should be as short as possible.3) When an analog output equipment be connected to the inverter, sometimes because of error act because of
interference cased by the analog output equipment or the inverter, when which happened, a 0.01~0.1uF/50Vcapacitor or a ferrite bead (enwind 3 laps) could be connected to the analog output equipment.
● Input multi-function terminal wiringThe multi-function input terminals of this series of inverters adopt full bridge rectifier circuits. PLC is X1 ~ X6 (X1~ X5 are exclusive for 3004GB and below models) common terminals, and is connected with 24V through JP1 whileleaving the factory; PLC1 is X7 ~ X10 common terminals on extension board, and is connected with ]24V1 throughJP1 with the typical mode of connection as follows:
Dry contact way
1) 24V internal power of the inverter is used. The modes of connection are shown in Fig. 2-17 (control board) andFig. 2-18 (extension board).
X1~X6
R
COM
+24V24V
5VPLC
+
-K X7~X10
R
COM1
+24V24V1
5VPLC1
+
-K
Fig. 2-17 Connection diagram while using internal 24Vpower supply (control board)
Fig. 2-18 Connection diagram while using internal 24Vpower supply (extension board)
2) An external power is used with the mode of connection shown in Fig. 2-19 (control board) and Fig. 2-20(extension board).
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
21
X1~X6
R
COM
+24V24V
5VPLC
+
-K
+- DC
R
+24V
5V
+
-K
+- DC
24V1
PLC1
X7~X10COM1
Fig. 2-19 Connection diagram while using an externalpower supply (control board)
NOTE: Remove the short jumper JP1 connectinginternal PLC and 24V
Fig. 2-20 Connection diagram while using outsidepower supply (extension board)
NOTE: Remove the short jumper JP1 connectinginternal PLC1 and 24V1
Source (drain electrode) mode
1) Use internal +24 V power of the inverter. External controller is the connection mode of NPN type commonemitter output, which is shown in Fig. 2-21 (control board) and Fig. 2-22 (extension board).
X1
PE
24V DC
24V
5VPLC
+
-
外部控制器
COM
5V
+
-X6
COM
1
6
屏蔽线近端接地
+
-
X7
PE
24V DC24V1
5VPLC1
+
-
外部控制器
COM1
5V
+
-X10
COM
7
10
屏蔽线近端接地
+
-
Fig. 2-21 Connection diagram while using source ofinternal + 24V power supply (control board)
Fig. 2-22 Connection diagram while using source ofinternal + 24V power supply (extension board)
2) Use internal +24 V power of the inverter. External controller is the connection mode of PNP type commonemitter output, which are shown in Fig. 2- 23 (control board) and Fig. 2-24 (extension board).
External controller External controller
Near-end of shieldline is grounded
Near-end of shieldline is grounded
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
22
X1
PE
24V DC
24V
5VPLC
+
-
外部控制器
COM
5V
+
-X6
1
6
屏蔽线近端接地
+
-
X7
PE
24V DC
5V
+
-
外部控制器
5V
+
-X10
7
10
屏蔽线近端接地
+
-
24V1
PLC1COM1
Fig. 2-23 Connection diagram while using drainelectrode of internal + 24V power supply (control
board)NOTE: Remove the short jumper JP1 connecting PLC and 24V,
and connect PLC to COM
Fig. 2-24 Connection diagram while using drainelectrode of internal + 24V power supply (extension
board)NOTE: Remove the short jumper JP1 connecting PLC1 and
24V1, and connect PLC1 to COM1
3) Use connection mode of source of an external power, as shown in Fig. 2-25 (control board) and Fig. 2-26(extension board).
X1
PE
24V DC
24V
5VPLC
+
-
外部控制器
COM
5V
+
-X6
COM
1
6
屏蔽线近端接地
+
-
+-
9~30V
X7
PE
24V DC
5V
+
-
外部控制器
5V
+
-X10
COM
7
10
屏蔽线近端接地
+
-
+-
9~30V
24V1
PLC1COM1
Fig. 2-25 Connection diagram while using source ofexternal power (control board)
NOTE: Remove the short jumper JP1 connecting internal PLCand 24V
Fig. 2- 26 Connection diagram while using source ofexternal power (extension board)
NOTE: Remove the short jumper JP1 connecting internal PLC1and 24V1
4) Use connection mode of drain electrode of an external power as shown in Fig. 2-27 (control board) and Fig. 2-28(extension board).
External controller External controller
Near-end of shieldline is grounded Near-end of shield
line is grounded
External controller External controller
Near-end of shieldline is grounded
Near-end of shieldline is grounded
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
23
X1
PE
24V DC
24V
5VPLC
+
-
外部控制器
COM
5V
+
-X6
1
6
屏蔽线近端接地
+
-+-
9~30V
X7
PE
24V DC
5V
+
-
外部控制器
5V
+
-X10
7
10
屏蔽线近端接地
+
-+-
9~30V 24V1
PLC1COM1
Fig. 2-27 Connection diagram while using drainelectrode of an external power (control board)
NOTE: Remove the short jumper JP1 connecting internal PLCand 24V
Fig. 2-28 Connection diagram while using drainelectrode of an external power (extension board)
NOTE: Remove the short jumper JP1 connecting internal PLC1and 24V1
● Wire Multi-function Output Terminals
1) Multi-function output terminals D0 as switching output can use the internal 24V power supply of inverter and thewiring method is shown in Figure 2-29.
5V
+24V24V
DO
COM
继电器
R
Fig. 2-29 On-off output connection mode 1 of multi-function output terminals
2) Multi-function output terminals DO as switching output can also use the external, 9~30V, power supply andthe wiring method is shown in Figure 2-30
COM
DO
24V+24V
5V继电器
DC 9~30V
+ -R
Fig. 2-30 On-off output connection mode 2 of multi-function output terminals
External controller External controller
Near-end of shieldline is grounded
Near-end of shieldline is grounded
Relay
Relay
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
24
3) Multi-function output terminals / Pulse output terminal DO as pulse output can use the internal 24V power supplyand the wiring is shown in Figure 2-31.
数字频率计
5V+24V
24V
DO
COM
+24V
R
Fig. 2-31 Digital pulse output connection mode 1 of multi-function output terminals
4) Multi-function output terminals / Pulse output terminal DO as Pulse output can also use the external, 9~30V,power supply and the wiring is shown in Figure 2-32
5V+24V
24V
DO
COM
+24V
R
数字频率计
DC9~30V
+-
Fig. 2-32 Digital pulse output connection mode 2 of multi-function output terminals
5) Multi-function output terminals Y1, Y2, Y3 can use 24V internal power of the inverter with the connection modesshown in Fig. 2-33 (control board) and Fig. 2-34 (extension board).
继电器
COM
CME
Y1
24V+24V
+5V继电器
COM1
CME1
Y2 Y3
24V1+24V
+5V
Fig. 2-33 Wiring diagram of multi-function outputterminals (control board)
Fig. 2-34 Wiring diagram of multi-function outputterminals ( extension board)
Digital frequencystatistics
Digital frequencystatistics
Relay Relay
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
25
6) Multi-function output terminals Y1, Y2, Y3 also can use external power (9~30V) with the connection modes asshown in Fig. 2-35(control board) and Fig. 2-36(extension board).
+5V
+24V24V
Y1
CME
COM
继电器
DC 9~30V+-
+5V
+24V24V1
Y2 Y3
CME1
COM1
继电器
DC 9~30V+-
Fig. 2-35 Wiring diagram of multi-function outputterminals (control board)
Fig. 2-36 Wiring diagram of multi-function outputterminals (extension board)
● Wiring of relay output terminals TA, TB, TC and BRA, BRB, BRC (exclusive for 35R5GB and abovemodels)If the drive inductive loads (e.g. electromagnetic relays, contactors) should be equipped with surge voltageabsorption circuit, such as the RC absorption circuit, piezoresistor or flywheel diode (pay attention to the diodepolarity when used for DC electromagnetic circuit), etc. Components of absorption circuit should be installedclose to both ends of coil of relay or contactor.
Tips:
1. Don’t short circuit terminals 24V and COM, otherwise the control board may be damaged.2. Please use multi-core shielded cable or multi-stranded cable (above 1 mm) to connect the control terminals.3. When using a shielded cable, the shielded lay’s end that is nearer to the inverter should be connected to PE.4. The control cables should be as far away(at least 30 cm) from the main circuit and high-voltage cables as
possible (including power supply cables, motor cables, relay cables and cables of contactor). The cables shouldbe vertical to each other to reduce the disturbance to minimum.
● Wiring of serial communication interfaceThe series of inverters provides users with RS485 serial communication interface, and can compose master-slavecontrol system. The host machine can be a personal computer or PLC controller (called upper computer for short),and the slave-based machine is this series of inverter. The upper computer can be used for real-time monitoring,remote control and other operations to inverters in network.Fig. 2-37 Illustration of wiring between the upper computer and the inverter interface:
Relay Relay
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
26
Fig. 2-37 Wiring diagram between the upper computer and the inverter interface
When multiple inverters are connected in one RS485 system, the communication suffers more interference,and a maximum of 31 inverters can be connected through RS485 serial bus. Wiring is very important.Communication bus must be shielded twisted pair wiring. The following connection method is recommended:
485- GND485+
变频器
485- GND485+
变频器
485- GND485+
变频器
485- SG485+
PLC
屏蔽线
Fig. 2-38 Recommended wiring diagrams (inverters and motors are all well grounded) when PLC is in multicomputer communication with inverters
When a PC is used as the host machine, a RS232/RS485 bus adapter should be added between the host machine andthe bus; when a PLC controller is used as the host machine, connect the dotted terminals, namely RS485 terminal ofslave-based machine and RS485 terminal of the host machine.When multiple 35R5GB and above inverters compose RS485 bus communication, the matched resistance toggleswitch SW6 on the control board of this series of inverters at the farthest ends of the bus should be turned to ONposition, as shown in Fig. 2-39.
Fig. 2-39 Schematic illustration of RS485 matched resistance toggle switch
If using the above wiring still cannot communicate normally, the following measures can be taken:1) Supply the PLC controller (or the upper machine) separately or isolate its power;2) When using a RS232/RS485 converter module, separate power supply for the modular converter can be
considered. And modular converter with opto-coupler isolation is recommended to use;3) Apply a magnetic ring on the communication line, and reduce the carrier frequency of the converter
appropriately if site conditions permit.
Upper computerRS232/RS485 converter
Inverter
RS485 communication interface
Pin No. Signal
Enclosure
Shieldedcable
Terminal name Description of terminal
Positive terminal of 5Vpower supply
TXD
RXD
Negative terminal of 5Vpower supply
Terminal name
Negative terminal ofsignal
Positive terminal ofsignal
Description of terminal Terminal name Description of terminal
Negative terminal ofsignal
Positive terminal ofsignal
Inverter Inverter Inverter
Shield line
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
27
● Description of keypad interface
Keypad connection interface CN5 on the control board adopts 8PIN drop-out lines with fool-proof ports. Users cancustomize extended keypad cable according to actual needs. But the keypad extension cable does not exceed 15 m,because when it exceeds 15 m, normal work cannot be guaranteed.
Fig. 2-40 Keypad interface CN5 on control board
The cables connecting keypad and control board use standard super-five-class network cable. RJ-45 Interface usesthrough-line method, namely both sides are connected according to EIA/TIA568B standard. You can make the cableby yourself if you need.
Tips
1. Both sides of keypad cable should be connected refer to Table 2-9. Otherwise, the cable couldn’t work properlyor even the keypad would be damaged.
2. When the keypad extension cable is longer than 1 m, which must use shielded twist-pair network cable, RJ-45interfaces of both sides of the cable should use crystal with shielded metal shell, connect shielded metal shell toshielded layer. Otherwise, it is likely to cause error action because of disturbance.
3. Be sure the extension cable of the keypad is no longer than 15 meters, otherwise it wouldn’t work properly.
Table 2-9 Standard for linesequence
No. Color
1 Citrus orange
2 Orange
3 White green
4 Blue
5 White blue
6 Green
7 White brown
8 Brown
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
28
2.6 Wiring of Inverter for Basic Operation
PB -
制动电阻
(外接、选配件)
LL
NN
U
V
W
24V
PLC
X1
X2
X3
X4
X5
COM
PE
10V
AI1
AI2
GND
PE
单相 220V
50/60HZ
多功能输入选择1
多功能输入选择2
多功能输入选择3
多功能输入选择4
多功能输入选择5
速度指令 0~10V
0~10V 0~20mA
PE
GND
AO1
PE
M
模拟量输出
0/4~20mA电流信号
SW2
A01
0/4~20mA0/2~10V
断路器
24V
DO
COM
PE
频率表(开路集电极输出)
输出0~50KHZ高速脉冲信号
TA
TB
TC
可编程继电器输出
标准RS485通讯口485+
485-
GND
SW1/SW3
AI1/AI2
IV
VI
PE
PG
PE
X5X4COM24V
0/2~10V电压信号
编码器输入信号
电位器
(阻值大于500Ω)
0~10V电压信号
0~20mA电流信号
+
X3
0~20mA0~10V
0~50KHZ高速脉冲输入信号
Figure 2-41 S2R4GB ~ S22R2GB wiring diagram
Potentiometer (theresistance is greaterthan 500Ω)0-10V voltage signal0-20mA current signal
Standard RS485communication port
Programmable relay output
Frequency meter (open collectoroutput)Output 0-50 KHZ high-speedpulse signal
Analog output0/4~20mA current signal0/2~10V voltage signal
0-50KHZ high-speed pulse input signal
Encoder input signal
Speedcommand
Single phase
Braking resistor(external, optional)
Circuitbreaker
Multi-function inputselection 1Multi-function inputselection 2Multi-function inputselection 3Multi-function inputselection 4Multi-function inputselection 5
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
29
PB -
制动电阻
(外接、选配件)
LR
NT
U
V
W
24V
PLC
X1
X2
X3
X4
X5
COM
PE
10V
AI1
AI2
GND
PE
三相 380V
50/60HZ
多功能输入选择1
多功能输入选择2
多功能输入选择3
多功能输入选择4
多功能输入选择5
速度指令 0~10V
0~10V 0~20mA
PE
GND
AO1
PE
M
模拟量输出
0/4~20mA电流信号
SW2
A01
0/4~20mA0/2~10V
断路器
24V
DO
COM
PE
频率表(开路集电极输出)
输出0~50KHZ高速脉冲信号
TA
TB
TC
可编程继电器输出
标准RS485通讯口485+
485-
GND
SW1/SW3
AI1/AI2
IV
VI
PE
PG
PE
X5X4COM24V
0/2~10V电压信号
编码器输入信号
电位器
(阻值大于500Ω)
0~10V电压信号
0~20mA电流信号
+
X3
0~20mA0~10V
S
0~50KHZ高速脉冲输入信号
Fig. 2-42 3R75GB~ 3004GB wiring diagram
Potentiometer (theresistance is greaterthan 500Ω)0-10V voltage signal0-20mA currentsignal Standard RS485 communication
port
Programmable relay output
Frequency meter (open collectoroutput)Output 0-50 KHZ high-speedpulse signal
Analog output0/4~20mA current signal0/2~10V voltage signal
Braking resistor(external, optional)
Three-phase
Circuitbreaker
Encoder input signal
0-50KHZ high-speed pulse inputsignal
Speedcommand
Multi-function inputselection 1Multi-function inputselection 2Multi-function inputselection 3Multi-function inputselection 4Multi-function inputselection 5
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
30
P1 +/B1 B2 -
DC reactor
(external,optional)
Braking resistor(external,optional)
RRSSTT
U
V
W
24V
PLC
X1
X2
X3
X4
X5
X6
X7
X8
COM1
PE
10V
AI1
AI2
GND
PE
Three-phase 380V
50/60HZ
Multi-function inputselection 1
PG
PEX6X5COM24V
BRC
BRB
BRAProgrammable relay output
0/2~10V voltage signal
Encoder inputsignal
Potentiometer
(the resistanceis greater than500Ω)0~10V voltagesignal0~20mA currentsignal
X9
X10
AI3-10~10V-20~20mA
PE
CME1
Output 3
SW7
A03
X40~50KHZ high-speed pulseinput signal
COM
24V1
PLC1
PE
AO3
GND1
PE
COM
PE
CME
Multi-function inputselection 2Multi-function inputselection 3Multi-function inputselection 4Multi-function inputselection 5Multi-function inputselection 6
Multi-function inputselection 7Multi-function inputselection 8Multi-function inputselection 9Multi-function inputselection 10
Programmable opencollector output
(opto-coupler isolation)
Speed command 0~10V
0~10V0~20mA
PE
GND
AO1
AO2
PE
M
Analog output
0/4~20mA current signal
SW2
A01
0/4~20mA0/2~10V
A02
SW5
Circuit breaker
24V
DO
COM
PE
Frequency meter(open
collector output)Output 0~50KHZ high-speedpulse signal
Y1
Y2
Y3
COM1
Programmable opencollector output
(opto-coupler isolation)
Output 1
Output 2
TA
TB
TC
Programmable relay output
Standard RS485communication port
485+
485-
GNDRS485
Matchedresistance
SW6ON ON
SW1/SW3/SW4
AI1/AI2/AI3
ONOFF
IV
VI
PE
Fig. 2-43 35R5GB~3015GB wiring diagram
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
31
RRSSTT
U
V
W
PE
M
PE
PN
PPB
24V
PLC
X1
X2
X3
X4
X5
X6
X7
X8
COM1
PE
10V
AI1
AI2
GND
PE
0~10V0~20mA
GND
AO1
AO2
PE
SW2
A01
0/4~20mA0/2~10V
A02
SW5
24V
DO
COM
PE
Y1
Y2
Y3
COM1
P1 + -
TA
TB
TC
485+
485-
GNDRS485
SW6ON ON
SW1/SW3/SW4
AI1/AI2/AI3
ONOFF
IV
VI
PG
PEX6X5COM24V
BRC
BRB
BRA
X9
X10
AI3-10~10V-20~20mA
PE
CME1
SW7
A03
X4
COM
24V1
PLC1
PE
AO3
GND1
PE
COM
PE
CME
DC reactor (externallyconnected ALPHA6000S-3132G
and the following options)
Brake unit and braking resistor
(external,optional)
Three-phase 380V
50/60HZ
Multi-function inputselection 1
Speed command 0~10V
Analog output
0/4~20mA current signal
Circuit breaker
Frequency meter(open
collector output)Output 0~50KHZ high-speedpulse signal
Programmable opencollector output
(opto-coupler isolation)
Output 1
Output 2
Programmable relay output
Standard RS485communication port
Matchedresistance
Programmable relay output
0/2~10V voltage signal
Encoder inputsignal
Potentiometer
(the resistanceis greater than500Ω)0~10V voltagesignal0~20mA currentsignal
Output 3
0~50KHZ high-speed pulseinput signal
Multi-function inputselection 2Multi-function inputselection 3Multi-function inputselection 4Multi-function inputselection 5Multi-function inputselection 6
Multi-function inputselection 7Multi-function inputselection 8Multi-function inputselection 9Multi-function inputselection 10
Programmable opencollector output
(opto-coupler isolation)
Fig. 2-44 3018G~ 3500G wiring diagram
Notes: 1.The set voltage or current of analog input terminals can be selected by toggle switch, and the factorysetting is the set voltage input. Its range can be set by parameter Group P4.2. The maximum output current of the control circuit terminal 10V is 30mA.3. X7-X10, BRA, BRB, BRC and other terminals in the figure are located on IO extension board.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 2 Installation and Wiring
32
2.7 Wiring Attention Be sure the input power supply of the inverter is cut off then you can remove or replace the motor. Be sure the inverter has stopped output then you can switch the motor or the power supply. If a peripheral (brake unit, reactor, filter) is added, test the insulation resistance of the peripheral to earth first
and be sure the value not below 4 MΩ. Besides shielding the input signal cable and the cable of frequency meter, the cables should be disposed
solely, not parallel with the main circuit cable, and far away from it as possible. In order to avoid error action caused by molestation, the control circuit cable should use stranding shielded
cables, and the wiring distance should be less than 50 meters. Be sure the shielded layers of shielded cables are not touching other signal cables or shell of equipment, you
can use insulating tape to enswathe bare shielding layer. The withstand voltage of all the cables should match with the voltage class of the inverter. In order to prevent accident, be sure that the control circuit terminal ”PE” and the main circuit terminal “PE”
are connected to earth, and the earthing cable can’t be shared with other equipment. The size of main circuitearthing cable should be more than one and a half of the main circuit cable. After completion of wiring,please check whether a cable, a bolt or a connection end. etc., was remained in the inverter, whether the boltswere fastened firmly, whether the bare cable of terminals were shorted to other terminals.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
33
Chapter 3 Operation
DANGER
1, Only turn on the input power supply after replacing the front cover. Do notremove the cover while the inverter is powered up.
2, When the retry function is selected, do not approach the inverter or the load, sinceit may restart suddenly after being stopped.
CAUTION
1, Since the stop key can be disabled by a function setting, install a separateemergency stop switch.
2, Since it is very easy to change operation speed from low to high speed, verify thesafe working range of the motor and machine before operation.
3, Do not check signals during operation.4, All inverter parameters have been preset at the factory. Do not change the settings
unless it is required. Failure to observe these precautions may result in equipmentdamage, serious personal injury or death.
3.1 Function and operation of keypadThe keypads of the inverter may have different exterior dimensions. However, all of them have the same array ofbuttons and LED display. Moreover, operation and function of them are all the same. Every keypad has four digitalsseven segments LED monitor, nine operation buttons, a digital encoder, and eight led indicators (five for statusindication and three for unit indication). User can perform function setting, inverter running, stop, and statusmonitoring with the keypad.
3.1.1 Keypad layout
四位数码管显示
编程键
移位键
运行状态指示灯
运行键
数字编码器上升
点动键
停止键故障复位键
频率单位:Hz
电流单位:A
电压单位:V
转速:r/min
线速:m/s
数字编码器下降
确定键
正反转切换键
RUN
PRGESC
>> ENTERJOG
STOPRESET
百分比%
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
- +
Fig. 3-1 Keypad layout and name of each part
Above the keypad are five status indicators: RUN, FWD, REV, REMOTE and TRIP. The indicator RUN will be litup if the inverter is running; the indicator FWD will be lit up if it running forward and the indicator REV will be litup if it runs reverse. The indicator REMOTE will be lit up if the inverter is not controlled by keypad. The indictorTRIP will be lit up if fault occurs. To see the details, see Chapter 3-3 description.
Running-state LCDs
Four-digit digital tubedisplay
Programming
Shift key
Run
Switching between positiveand negative rotation Jog
Stop (reset in case offailure)
Enter
Decrease of digital encoder
Increase of digital encoder
Unit of voltage: V
Line speed: m/s
Unit of current: A Percentage
Rotate speed: r/min
Unit of frequency: Hz
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
34
In monitoring status, the LED will display the content of current monitoring object. At abnormal state It will displaythe fault code when the inverter falls to run and show the warn code when the inverter is warning. At normal state, itwill display the object selected by parameter group PC. See table 3-1 description for details.In programming mode, nixie tube displays three-level menus: function group, function codes and function parametervalues. Under the function group display menu, it displays function group from "-P0-" to "-PF-"; under functioncode menu, it displays the corresponding function codes in the group. Under the parameters displayed in the functionmenu, the parameter values will be displayed.
Table 3-1 The LED monitoring objects
PC display control Monitoring object Permission of Modifyin running state
PC.01=1 Output frequency (Hz) (before compensation)
PC.02=1 Output frequency (Hz) (actual)
PC.03=1 Output current (A)
PC.04=1 Setting frequency (Hz blink) permission
PC.05=1 Motor rotate speed (r/min)
PC.06=1 Setting speed (r/min blink) permission
PC.07=1 Running linear speed (m/s)
PC.08=1 Setting linear speed (m/s blink)
PC.09=1 Output power (no unit)
PC.10=1 Output torque (%)
PC.11=1 Output voltage (V)
PC.12=1 Bus voltage (V)
PC.13=1 AI1 (V)
PC.14=1 AI2 (V)
PC.15=1 AI3 (V) (reserve for 3004GB and below models)
PC.16=1 Analog PID feedback (all unit lights are normally open, nounit)
PC.17=1 Analog PID setting (all unit lights flicker, no unit) permission
PC.18=1 Extern count value (no unit)
PC.19=1 State of terminal (no unit)
PC.20=1 Actual length(m)
3.1.2 Description of button function
On the inverter keypad, there are nine buttons. In addition, the function of each button is defined as table 3-2.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
35
Table 3-2 Keypad menu
key Name of key Key functions
PRGESC
Programming/Exit
Enter or exit programming mode. In monitoring mode, press PRG/ESC key toswitch to programming mode. First, enter function group, and press ENTER keyto enter function code and function parameters progressively; press PRG/ESC, itwill enter function parameters, then function code, function group, nextmonitoring state, exit step by step like this; in case of an inverter failure, switch tofailure display and function group. When giving an alarm, switch to alarm stateand functional group.
ENTER Enter Enter the sub-menu, or store parameters during parameter setting.
Digitalencoder+
-
Up (clockwise)+
It can increase the function code group number, and function code number orfunction code value. In parameter setting mode, LED nixie tube blinking displaysmodified bit. If pressing the key, the function code value will increase; in displaystate, if the keypad is set to be effective, digital frequency setting, speed PIDsetting or analog PID digital setting can be increased through the knob.
Down(counterclockwise)
-
It can reduce the function code group number, function code number or functioncode value. In parameter setting mode, LED nixie tube blinking displays modifiedbit. If pressing the key, the function code value will decrease; in display mode, ifthe keypad is set to be effective, digital frequency setting, speed PID setting oranalog PID digital setting can be decreased.
>> Shift key In edit mode, the modified bit of the set data can be selected;In monitoring mode, display state parameter can be switchable.
JOG Jog In keypad mode, press this key to enter into inching running mode.
RUN Run In keypad control mode, the inverter will start running, and a running commandwill be given.
Direction switchkey
Press this button to change the direction of rotation. See P0.08 functiondescription for details.
STOPRESET
Stop/Reset key In keypad control mode, the key is used to stop the inverter. Clear the failure andreturn to normal state when there is a failure.
3.1.3 Description of LED digitals and indicators
On the inverter keypad there are four digitals seven segments LEDs, 3 unit indicators, 5 status indicators. The fourdigitals can display the monitoring object, the function parameter values and the fault code, the warning code. Thethree unit indicators have eight combinations, and each combination corresponds to one-unit. The combinations andtheir corresponding units are as Figure 3-2
亮 灭
PID
r/min
m/s%A
V
Hz
无单位
r/min
m/s%A
V
Hz
Hz
r/min
m/s%A
V
Hz
A
r/min
m/s%A
V
Hz
V
r/min
m/s%A
V
Hz
r/min
r/min
m/s%A
V
Hz
m/s
r/min
m/s%A
V
Hz
%
r/min
m/s%A
V
Hz
Figure 3-2 Combinations of unit indicator and their means
The five status indicators are just above the four digitals and the mean of each indicator is shown in table 3-3
No unit
On Off
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
36
Table 3-3 Description of state indicators
Indicator Display state The current state of the inverter indicated
RUN Running-state LCDs
Off StopOn Running
Flicker Zero frequency operation
FWD Forward running directionindication
Off Reverse rotation or not runNormally on Stable positive rotationQuick flash Acceleration and deceleration of positive rotationSlow flash Stop, the direction is forward
REV Reverse running directionindication
Off Positive rotation or not runNormally on Stable reverse rotationQuick flash Acceleration and deceleration of reverse rotationSlow flash Stop, reverse direction
TRIP failure indicatorOff NormalFlicker Failure
REMOTE indicator(Exclusive for control keypad)
Off Keypad control state
On Terminal control stateFlicker Serial communication state
3.1.4 Display state of keypad
The working state of this series inverter includes two states: stop state and running state.Stop State: If there is no running command input after the inverter is power on and initialized, or the inverter hasreceived a stop command input, the inverter will come into stop state.Running state: The inverter has received a running command and then comes into running state.Therefore, the display states of keypad include display of stop state, display of running state and display ofprogramming state and display of fault and warning state.
Display of stop state
If the inverter is a stop state, the four digitals of keypad will display the parameters value of stop state: For example,
the output frequency. See Figure-3-2, and the unit indicator will indicate the unit of the parameter. Press >> key,
the keypad will cycling display the value of different monitoring objects (selected by the parameter group PC) .
Display of running state
If the inverter got an effective running command, it will come into running state. Then the four digitals of keypadwill display the parameters value of running state. See example of Figure 3-3-3. and the unit indicator will indicate
the unit of the parameter. Press >> key, the keypad will cycling display the value of different monitoring objects
(selected by the parameter group PC) .
Fault and warning state
If the inverter has checked out a warning signal, it will come into warning state and show the warning codeflickeringly. See example of Figure 3-3-5. If the warning signal disappeared, the warning code will automaticallydisappear. If the inverter has checked out an error, it will come into fault state and show the fault code steadily.
Moreover, the indicator TRIP will light up, see example of Figure 3-3-6. By pressing the >> key, user can view
the parameters value of stop state. If you want to see the details of fault information, press the PRGESC
key, the
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
37
keypad will go to programming state, to see the details, please see the parameter values of group PE. To reset the
inverter, press the STOPRESET key or control terminals or serial communication. If the fault signal is still exist, the
keypad will keep the fault code displaying and the indicator TRIP lighting
图1 上电初始化显示 输出频率为0.00Hz
图2 停机状态,RUN灯熄灭 FWD慢闪指示设定方向
图3 运行状态,RUN灯亮, 加速中FWD指示灯快闪
图4 运行状态,RUN灯亮, 运行到设定频率,稳 速时FWD恒亮
图5 告警时,闪烁显示 告警字符
图6 故障时,显示故障代 码TRIP故障指示灯闪烁
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
RUN FWD REV TRIPREMOTE
r/min
m/s%A
V
Hz
- +
- +- +- +
- +- +
Figure 3-3 Display of initialization, stop, running, warning and stop of inverter
Function code edit mode
In stopping, operation or failure alarm state, press PRGESC key, it will enter edit mode (if there is the user
password, see PF.00 description in Chapter 5.16 Parameter Protection), and the edit mode displays in there-levelmenu mode as shown in Fig. 3-4 with the sequence of function code group → function code number → function
code parameter, it can exit by pressing ENTER key. In function parameter display state, parameter storage
Fig. 1 This is in reset state, itdisplays that the output frequency is
0.00Hz
Fig. 2 This is in Shutdown state, RUNindicator goes out, FWD slow blinkindicator indicates the set direction
Figure 3 Running state, RUN indicatorlights, FWD indicator blinks fast during
acceleration
Fig. 4 This is in running state, RUNlights, the inverter runs to the setfrequency, FWD lights constantly
when the inverter runs steadily
Fig. 5 It is giving an alarm, blinkingdisplay the alarm character
Fig. 6 A fault occurs, the fault code isdisplayed, TRIP fault indicator flashes
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
38
operation can be carried out by pressing ENTER key, and it can exit by pressing PRGESC key.
Figure 3-4 Display menus of programming state
3.1.5 Operation method of keypad
Here are some examples of how to run the inverter by the keypad:Monitoring object switching:
50.00 45.0 50.00 1440 1440 0.000
>> >> >>>>>>>>
50.00Display of LED
Operationof key
>>
Actual outputfrequency
Output frequencybefore compensation
Output current
Setting frequency
Motor rotate speed
Seting speed
Actual length
Fig. 3-5 Examples of running parameters display operations of (stopping switching method is the same as above)
Frequency adjustment at common running: (Example: change the setting frequency from 50.00 Hz to 40.00 Hz)
0.00 50.00 49.99 49.50
outputfrequency
Turn left thedigital
encoder,thekeyboard willautomatically
come intofrequency setting
state.Unit Hzwill blink.Andthe monitoring
object is settingfrequency
turn left 1time,setingfrequencydecrease0.01Hz
Keep onturnning,
the decreasestep length can
reach to0.10Hz,setingfrequence can
decrease 0.10Hz1 time.
The maximalstep lengthcan reach
to1Hz.Depressthe Enter
key to savethe desired
value.
40.00
3 secondslater,the
keyboard willautomaticallyreturn to the
originalmonitoringobject.
0.00
- - - -
Stoptrunning
Display of LED
Operationof key
Figure 3-6 Flow chart of frequency setting
This method applies to given frequency parameter adjustment when the initial display state is any state.
When the monitor display is set speed, analog PID digital setting, the parameters can be modified directly and can
display the set speed and analog PID digital setting by pressing + key (dextrorotation) or - key
(levogyration).
Shutdown stateparameter display oroperation stateparameter display orfault alarm display
Editing mode
First-levelmenu
Second-levelmenu
Third-levelmenu
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
39
Setting of function code parameters: (example of changing Jog acceleration time, function code P2.01 from 6.0s to3.2s)
0.00 P2.01
monitoringstate
go intoprogramming
state.displayparametergroup menu
Enterinto
parametercode
numbermenu
turn right 1time,choseparameter
codenumberP 2.01
Enter intoparametervalue menu
Turn left 3times tochang the
number to 3
save thechanged valueand exit toparameter
code numbermenu
Displayof LED
Operationof key
Shift tochange theblinkingplace toright
Exit toparameter
groupmenu
Turn right 2times to
change thenumber to 2
Exit fromthe
programmingstate
turn right 2times,choseparametergroup P 2
P2.00-P2--P0-
-P2- P2.02 003.2 003.0
006.0 003.0
ENTERPRGESC
ENTER >>P R GE S C
P R GE S C
ENTER ENTER+
+
+ -
Figure 3-7 Flow chart of parameter setting
In three-level menu state, no flicker bit for a parameter indicates that the function code cannot be modified, and thepossible reasons include: Modifying the value is forbidden because the parameter is actual measure value, or running record value or
fixed value. The function parameter cannot be changed when the inverter is at running state. However, it canbe changed at stop state.
So stop the inverter and then change the parameter value. The inverter parameters are protected. If function parameter value PF.01=1 or 2, the parameters are forbidden
to be changed. This parameter protection function is to avoid operation mistake. To change the protectionparameters, change value of function code PF.01 to zero, then all the parameters can be changedNote: When the digital encoder is damaged, JOG key can set as UP, key can be set as DOWN.
UP/DN activation method: UP/DN function can be activated by pressing the key combination >> +
JOG for 5s (operation illustration is shown in Fig3.8), which will reset after powering off. Parameter
PD.12 can be set by activating UP/DN function, please see PD.12 function description for details In monitoring or alarm mode: function of JOG and maintain unchanged
In programming mode: JOG acts as UP, acts as DN. continuous augmentation function is
activated by pressing JOG key or for 2s (operation illustration is shown in Fig. 3-9: modify the
run command control mode setting P0.07 = 0: keypad control into 4: serial communication)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
40
Fig. 3-8 Operation illustration of UP/DN activation Fig. 3-9 Operation illustration of key parameter editing
3.2 Run command mode selectThe run command modes determine the methods of the inverter running and stop. The inverter has three runcommand modes:
● Run command from the keypad: press the key RUN , STOPRESET , to control the inverter.
● Run command from the control circuit terminals: by using the terminal defined as FWD, REV, COM (2-wirecontrol mode) : FWD, REV, Xi ( 3-wire control mode ) to control the inverter.
● Run command from serial communication: Use a PC or PLC to control the inverter to run or stop.
Change P0.07 to select serial communication mode. The default setting is Keypad control mode (The defaultvalue P0.07 is 0) , If terminal control mode is needed, please change the value to 1 or 2. If we want to keep the
“STOP/RESET” key STOPRESET active in terminal control mode, we must set the value to 2.
If we need to control the inverter by PC or PLC serial communication, we should set P0.07 to 3 or 4.
If the indicator REMOTE is off, it tells that the inverter is controlled by the keypad. If the indicator REMOTE ison, it tells that the inverter is controlled by the terminals. In addition, if the indicator is flickering, it tells theinverter is controlled by serial communication.
3.3 Trial Operation3.3.1 Operation mode of inverter
This series of inverter have five operation modes: JOG operation, PID closed loop operation, Wobble frequencyoperation, PLC programmed operation and common operation.
JOG operation: If the inverter received a jog operation command (For example, press JOG key) at a stop
state, the inverter will jog running at the jog frequency reference set by function code P2.00~P2.02 PID closed loop operation: If PID close loop operation is selected by P0.03 (set the value to 11) , the inverter
will chose PID closed loop operation mode. In other word, it will come into PID adjustment as the PID feedand PID feedback. (See parameter group P7)
Wobble frequency operation: If Wobble frequency operation mode is active (set value of parameter code
LEDdisplay
Keyoperation
LEDdisplay
Keyoperation
While pressing theShift key and JOGkey at the sametime continuouslyfor 5s, functiongroup P1 will bedisplayed
Enter editingmode, displaythe first-levelmenu
Stop
para
met
erdi
spla
yst
ate Confirm
function codeand enter thesecond-levelmenu
JOG key actsas UP key,press JOG keyfor four timesto enter P0.04
Press ENTERkey to enterdisplay ofparameterP0.04
Exiteditingmode
Exiteditingmode
Go backto thefirst-levelmenu
Save themodified valueand go back tosecond-levelmenu
Press the JOGkey for fourtimes to setparameter P0.04from 0 → 4
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
41
P0.03 to 12) , the inverter will come into Wobble frequency operation. The Wobble frequency runningparameters can be modified in parameter group P6. By selecting a multi-function terminal and setting thevalue to 46, connecting the terminal to terminal “COM”, Wobble frequency operation state can be reset (Fordetails please see Chapter IV Function of P3)
PLC program timing run: PLC function selection is active (P0.03 = 10), the inverter will select PLC operatingmode, and the inverter will run according to the preset operating mode (see Description of Group P5 functioncode). PLC program running can be paused through the function of multi-function terminal 43 (see ChapterIV Function of P3); PLC halt mode can be reset through the function of multi-function terminal 44 (Fordetails please see Chapter IV Function of P3);
Normal operation: It is also known as simple open-loop operation mode, including 9 modes, which arekeypad digital setting, terminal AI1, terminals AI2, terminal AI3 (Reserved for 3004GB and below models),pulse input, serial communication, multi-stage speed and terminal UP/DOWN, slip compensation rate, etc.
3.3.2 Check points before running
To check the inverter and be familiar with the operation, test run can be carried out before running, and thefollowing points should be checked before running: the wiring of major loop is correct; terminal screws aretightened; wiring is correct; short circuit caused by cable breakage should be avoided; load state is correct.
3.3.3 Check points during running
Motor is functioning smoothly; the motor rotates in correct direction; the motor has no abnormal vibration;acceleration or deceleration operation is smooth; the keypad display is correct.Running state of this series of inverter switches as shown in Fig. 3-10:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
42
Operation mode ofinverter
JOG active
PID termianl active
Wobble frequencyrunning terminal
active
P L C t e r m i a n la c t i v e
PID running
Wobble frequencyrunning
PLC running
Termianlfunction:
FC frequencysetting active
Common running
NO
NO
NO
NO
NO
END
YES
Running according toP0.01 selection
JOG running
YES
YES
YES
YES
Figure 3-10 Operation modes switching of inverter
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
43
3.3.4 Operation of initial power on
Please follow technical requirements provided in this manual for wiring and connections. After correct wiring andchecking power supply, power on air switch of AC power on input side of the inverter to supply power to theinverter, the contactor operates normally. When nixie tube displays output frequency, the inverter has beeninitialized.If the keypad is not normally connected, CCF2 fault will display after 5seconds, and then the keypad should bereconnected. Operation of initial power on is shown in Fig. 3-11:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
44
w i r i n g i s r i g h t .
w i r i n g a s t h er e q u i r e m e n t s t a t e d
i n t h i s m a n u a l
P o w e r O N
s e e o u t p u t f r e q u e n c ym o n i t o r : 0 . 0 0 H z
P o w e r o n f a i l e d
D i s c o n n e c t t h e p o w e ri n p u t a i r s w i t c h .
C h e c k t h e r e a s o n
h e a r d t h e s o u n d o fc o n t a c t o r i n d r a f t ?
D i s p l a y f a u l tc o d e " C C F 2 " o r n o
d i s o l a y
Y E S
N O
Y E S
N O
Y E S
Y E S
S t a r t
N O
N O
P O W E R O N s u c s e s s f u l
t h e i n p u tv o l t a t e i s r i g h t
Fig. 3-11 Operation process of initially powering on the inverter
3.3.5 First test run operation
Please perform the first test run operation according to the following processes (no extension PG card for 3004GBand below models).
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
45
开始
确认接线正确后上电
恢复出厂参数(设置PF.02=3)
按照电机铭牌设定基本频率P0.09、最大输出电压P0.16、电机参数P0.14、PA.01-PA.04(PA.15-PA.18)
按下JOG键点动运行
若电机旋转方向错误,修改P2.37、P2.45或断电并交换任意两相电机线、编码器AB线后再上电
电机参数整定:带负载时实施静止参数整定PA.29=1;无负载时实施旋转整定PA.29=2
按下RUN键后开始自整定,整定完毕后自动停机
设置预备运行的设定频率P0.02
选择控制方式
P0.01=0或3,V/F控制,设定P9组V/F控制参数
P0.01=1或2,矢量控制
按RUN键运行
按STOP/RESET键停机
结束
若电机旋转方向错误,更改P2.37
P0.01=1闭环矢量(3004GB以下保留);
是否
使用内置PG
设置内置PG参数P2.44、P2.46、P3.05、P3.06(3004GB以下:P3.04、P3.05)、P2.49、P2.50;设置扩展PG参数P2.42、P2.46、P2.49、P2.50
监控运行电流和频率,如果出现异常则检查编码器每转脉冲数P2.42、更改编码器方向P2.43或
断电修改编码器的接线
监控运行电流和频率,如果出现异常则检查编码器每转脉冲数P2.44、更改编码器方向P2.45或
断电修改编码器的接线
若电机旋转方向错误,修改P2.37、P2.43或断电并交换任意两相电机线、编码器AB线后再上电
是否
Fig. 3-12 Operation process of inverter first test run operation
Start
Power on after correct wiring
Recovery factory parameters(set PF.02 = 3)
Set fundamental frequency P0.09, maximum output voltageP0.16, motor parameters P0.14, PA.01-PA.04 (PA.15-PA.18) in
accordance with the motor nameplate.
P0.01 = 0 or 3, V/F control,set V/F control parameters of
Group P9
Control manner select
P0.01 = 1 or 2, vector control
Tuning of motor parameters: perform static parameter tuning PA.29 =1 when there is load; perform rotation parameter tuning PA.29 = 2
when there is no load
Auto-tuning start after pressing Run key, and it willautomatically shut down after tuning
Press the JOG key for inchingrunning
P0.01 closed loop vector(reserve for models below
3004GB);
No Yes
NoUsing built-in PG
If the motor rotates inwrong direction,
change P2.37
Yes
Set extension parameters of PG, P2.42, P2.46, P2.49,P2.50
Monitor running current and frequency, if an abnormalityoccurs, check pulses per revolution P2.42 of the encoder,change encoder direction P2.43 or power off and modify
the wiring of the encoder
If the motor rotates in the wrong direction, modify P2.37,P2.43 or power off and exchange any two-phase motor cable
with encoder AB line, and then power on
Set the set frequency P0.02 ready to run
Press RUN key torun the inverter
Press the STOP/RESET keyto stop the inverter
End
If the motor rotates in the wrong direction, modify P2.37,P2.45 or power off and exchange any two-phase motor cable
with encoder AB line, and then power on
Monitor running current and frequency, if an abnormalityoccurs, check pulses per revolution P2.44 of the encoder,change encoder direction P2.45 or power off and modifythe wiring of the encoder
Setting built-in PG parameters P2.44, P2.46, P3.05,P3.06 (models below 3004GB: P3.04, P3.05), P2.49,
P2.50;
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
46
3.4 Commissioning of keypadAssume that the inverter need to run forward at 30.00 Hz at first, then run reverse at the same frequency. Using thekeypad can take the following steps to realize the task:A typical operation pattern using the keypad:
P o wero n
Frequen cySet t in g
Fo rward Run
Fo rward
3 0 .0 0 Hz
Rev erse Run
a b c d
Rev erse
30.00Hz
e
S t o p
Figure 3-13 Operation sequence by keypad
Run and stop operation:
Figure 3-14 Flow chart of running and stop operation
Jog running operation: (Assume that the current run command mode is keypad and the inverter is at stop state)
0.00 0.50 5.00 0.00
outputfrequencymonitordisplay
depressjog keyand keep
on
Displayof LED
Operationof key
stopReleasethe key
JOGThe inverter goes intorunning state and theoutput frequecy goes upgradually to the jogging
setting frequency
JOGOutput frequency
will drop graduallyuntill the inverter
is stop
Figure 3-15 Example of Jog running
3.5 Operation of Control Circuit TerminalAssume that the inverter needs to run forward at 30.00 Hz at first, and then stop by terminal, using the keypad cantake the following steps to realize the task:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 3 Operation
47
Sequence of terminal operation:
Poweron
Frequencysetting
Running
Forward
30.00Hz
Stop
a b c d
Figure 3-16 Sequence of terminal operationOperation steps:
Figure 3-17 Flow chart of running and stop operation by terminal
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
48
Chapter 4 Parameter Index
Notes:“○”means that the parameters can be changed during inverter running and stop state;“×”means that the parameters cannot be changed during running;“*” means that the actually measured value or fixed parameters cannot be changed;“-” means that the parameters can be only set by the manufacturer and cannot be changed by the user.
P0: Basic functionFunction code Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P0.00 Menu displaymode
Menu displaymode
0: Standard menu1: Check mode menu 0 ○ 0100
P0.01 Control mode Control mode
0: V/F control1: Closed-loop vector control2: Open-loop vector control3: V/F separation control(Closed loop vector controlmode is only active forALPHA6000V series inverters)
2 × 0101
P0.02 Frequency digitalsetting
Frequency digitalsetting 0-maximum frequency 0.00Hz ○ 0102
P0.03 Frequencysetting source 1
Frequencysetting source 1
0: NULL1: Frequency digital setting,
digital knob adjustment2: Terminal AI13: Terminal AI24: Terminal AI3 (reserve for
3004GB and belowmodels)
5: Pulse input6: Communication setting7: Line speed (reserve)8: Multi-stage speed9: Terminal UP / DOWN
10: Program timing run (PLC)11: PID12: Wobble frequency run
(reserve)When the frequency source is 0~ 7, if multi-stage speedterminals are effective, operateaccording to the operationprocess of "multi-stage speed"
1 × 0103
P0.04 Frequencysetting source 2
Frequencysetting source 2
0-8 (consistent with P0.03)9: Torque difference
compensation dosageThis frequency source has nomulti-stage speed terminalpriority mechanism
0 × 0104
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
49
Function code Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P0.05Frequencysettingcombination 1
Frequencysettingcombination 1
0: Frequency setting source 11: Frequency setting source 22: MIN (frequency setting
source 1, frequency settingsource 2)
3: MAX (frequency settingsource 1, frequency settingsource 2)
4: Frequency setting source 1 +frequency setting source 2
5: Frequency setting source 1 -frequency setting source 2
6: Frequency setting source1×frequency setting source2
7: Frequency setting source1÷frequency setting source2
8: |Frequency setting source1-frequency setting source2|
9: Frequency setting source 2 ×(maximum output frequency+ frequency setting source1) ÷ maximum outputfrequency
0 × 0105
P0.06Frequencysettingcombination 2
Frequencysettingcombination 2
0~9, ditto.It is enabled after defining FCterminal and the terminal isenabled
0 × 0106
P0.07Setting of runcommand setmode
Run commandset mode
0: Keypad control1: Terminal control 1 (STOP
key is inactive)2: Terminal control 2 (STOP
key is enabled)3: Serial communication 1
(STOP key is inactive)4: Serial communication 2
(STOP key is enabled)5: Terminal control 3 (STOP
and JOG keys are inactive)
0 ○ 0107
P0.08 Keypad directionsetting
Keypad directionsetting
0: Positive rotation 1: Reverserotation 0 ○ 0108
P0.09 Fundamentalfrequency
Fundamentalfrequency
3004GB and below:0.10~650.0Hz
35R5GB and above:0.10~400.0Hz
50.00Hz × 0109
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
50
Function code Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P0.10 Maximum outputfrequency
Maximumfrequency
3004GB and below:MAX [50.00Hz, upper limitfrequency, set frequency,multi-stage frequency, jumpingfrequency] ~ 650.0Hz35R5GB and above:MAX [50.00Hz, upper limitfrequency, set frequency,multi-stage frequency, jumpingfrequency] ~ 400.0Hz
50.00Hz × 010A
P0.11 Upper limitfrequency source
Upper limitfrequency source
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (reserve for
3004GB and below models)4: Pulse input5: Communication setting
0 × 010B
P0.12 Upper limitfrequency
Upper limitfrequency
MAX [lower limit frequency,jog frequency, UP/DN givenamplitude, sleep threshold] ~maximum frequency
50.00Hz ○ 010C
P0.13 Offset of upperlimit frequency
Offset of upperlimit frequency 0.00Hz~upper limit frequency 0.00Hz ○ 010D
P0.14 Rated voltage ofmotor
Rated voltage ofmotor 60~480V Rated
voltage * 010E
P0.15 Lower frequencylimit
Lower frequencylimit 0.00Hz~upper limit frequency 0.00Hz ○ 010F
P0.16 Maximum outputvoltage
Maximum outputvoltage 60~480V Rated
voltage × 0110
P0.17 Knob adjustingrate
Knob adjustingrate
0: Digital knob integralregulation(1~250)×(0.01Hz/1rpm)Knob adjusting rate
50 × 0111
P0.18 Accelerationtime 1
Accelerationtime 1
Power ≤ 132kW0.1~3600s
Power ≥ 160kW1.0~3600s
22kWandbelow:
6.0sOthers:
20.0s
○ 0112
P0.19 Decelerationtime 1
Decelerationtime 1
Power ≤ 132kW0.1~3600s
Power ≥ 160kW1.0~3600s
22kWandbelow:
6.0sOthers:
20.0s
○ 0113
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
51
P1: Start-stop controlFunction
code Parameter LCD display Setting range Factory setting Mod. MODBUSaddress
P1.00 Starting mode Starting mode
0: Start from the startfrequency
1: First brake (excitation),and then start at the startfrequency
2: Rotating speedtracking (must be
connected to PG orrotating speed trackingboard, 3004GB and belowmodels do not supportrotating speed trackingboard)
Note: The startup procedureincludes initial power-on,power restoration afterinstantaneous stop, externalfault reset, and all startupprocedure after free stopping
0 ○ 0200
P1.01 Startingfrequency
Startingfrequency 0.10~60.00Hz 0.50Hz ○ 0201
P1.02Startingfrequency holdtime
Start hold time 0.0~10.0s 0.0s ○ 0202
P1.03 Start DCbraking current
Start brakingcurrent
Depend on model0-100.0% of rated current ofthe motor.It is active only in V/Fcontrol mode, the upper limitis 80% of the nominal currentof inverter or smaller oneamong the nominal current ofthe motor; in vector controlmode, the current isdetermined by P8.00pre-excitation currentcompensation factor; whenthe set value is less than100%, perform it at 100%
0.0% ○ 0203
P1.04 Start DCbraking time
Start brakingtime 0.0~30.0s 0.1s ○ 0204
P1.05 Start presetfrequency
Start presetfrequency 0.00-maximum frequency 0.00Hz × 0205
P1.06Presetfrequency holdtime
Presetfrequency holdtime
0.0~3600.0s 0.0s × 0206
P1.07
Accelerationanddecelerationmode
Accelerationanddecelerationmode
0: Linear 1: S curve2: (Reserve) 3: (Reserve) 0 ○ 0207
P1.08 S curve starttime
S curve startsegment
10.0-50.0 % (acceleration anddeceleration time )P1.08+P1.09≤90%
20.0% ○ 0208
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
52
Functioncode Parameter LCD display Setting range Factory setting Mod. MODBUS
address
P1.09S curveascendingsegment time
S curveascendingsegment
10.0-80.0 % (acceleration anddeceleration time)P1.08+P1.09≤90%
60.0% ○ 0209
P1.10 Stop mode Stop mode0: Deceleration stop1: Free stop2: Deceleration + DC braking
0 × 020A
P1.11stoppingDCbrakingfrequency
Stopping brakefrequency
0.00-MIN(50.00Hz, upperlimit frequency ) 2.00Hz ○ 020B
P1.12
stoppingWaiting time ofDC braking atstop
stoppingWaiting time ofDC braking atstop
0.00~10.00s 0.00s ○ 020C
P1.13
Set source ofstoppingDCbraking currentat stop
DCbrakingStopping currentsource at stop
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (reserve for
3004GB and belowmodels)
4: Pulse input5: Communication settingRated current of the motor is
100% current
0 ○ 020D
P1.14stoppingDCbraking currentat stop
DCbrakingStopping current atstop
Depend on model0.0~100.0%Rated current of the motor is100% current
0.0% ○ 020E
P1.15stoppingDCbraking time atstop
DC brakingStoppingtimeat stop
0.0~30.0s 0.0s ○ 020F
P1.16 Stop holdfrequency
Stop holdfrequency 0.00-maximum frequency 0.00Hz × 0210
P1.17 Stop HoldTime
Stop HoldTime 0.0~3600.0s 0.0s × 0211
P1.18 Brakingselection
Brakingselection
0: Do not use brake1: Use dynamic braking2: Use magnetic flux braking3: Use dynamic and magneticflux braking
3 × 0212
P1.19 Dynamicbraking usage
Dynamicbraking usage
30.0%~100.0%Note: It is active for 3015GBand below built-in models ofthis series; automatically adddynamic braking indeceleration
100.0% × 0213
P1.20 Instantaneousstop handling
Instantaneousstop handling
0: It will be fault Uu1 in caseof instantaneous stop1: Give an alarm Uu within
instantaneous stop time,and give fault Uu1afterwards
2: It will give an alarm Uu incase of instantaneous stop
0 × 0214
P1.21 Instantaneousstop time
Instantaneousstop time 0.5~10.0s Depend on
model × 0215
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
53
Functioncode Parameter LCD display Setting range Factory setting Mod. MODBUS
address
P1.22
Operationselection afterinstantaneousstop alarm
Instantaneouspower failureoperationselection
0: Failure to actuate1: Slowdown running 0 ○ 0216
P1.23
Rate ofdecelerationduringinstantaneousstopdecelerationrunning
Decelerationrate ofInstantaneousstop
0.00Hz / s ~ maximumfrequency / s
10.00Hz / s ○ 0217
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
54
P2: Auxiliary runFunctioncode Parameter name LCD display Setting range Factory
setting Mod. MODBUS address
P2.00 Jog frequency Jog frequency 0.10Hz~upper limitfrequency 5.00Hz ○ 0300
P2.01 Jog accelerationtime
Jogaccelerationtime
Power ≤ 132kW0.1~3600s
Power ≥ 160kW1.0~3600s
22kW andbelow:6.0sOthers:20.0s
○ 0301
P2.02 Jog decelerationtime
Jogdecelerationtime
Power ≤ 132kW0.0~3600s
Power ≥ 160kW0, 1.0~3600s
Note: If the decelerationtime is 0, stop in themode of free stopping atstop in inching running
22kW andbelow:6.0sOthers:20.0s
○ 0302
P2.03
Time of switchingbetween positiveand negativerotation
Time ofswitchingbetweenpositive andnegativerotation
0.0~3600.0s 0.0s ○ 0303
P2.04Lower limitfrequency handlingmode
Lower limitmode
0: Running at lowerlimit frequency
1: Running at 0frequency
2: Stopping3: Reserve
0 × 0304
P2.05 Frequencydeviation setting
Frequencydeviation 0.00~2.50Hz 0.10Hz ○ 0305
P2.06Carrier frequencyadjustmentselection
Carrierfrequencyadjustmentselection
0: No automaticadjustment
1: Depending on theload,The inverterautomatically adjustthe temperature
It is the upper limit ofcarrier frequency invector control mode orwhen there is noautomatic adjustment
1 ○ 0306
P2.07 Upper limit ofcarrier frequency
Upper limit ofcarrierfrequency
Depend on model Depend onmodel × 0307
P2.08 Lower limit ofcarrier frequency
Lower limit ofcarrierfrequency
1.0~P2.07 1.0 kHz × 0308
P2.09 Hopping frequency1
Hoppingfrequency 1
0.00-maximumfrequency 0.00Hz × 0309
P2.10 Hopping frequency2
Hoppingfrequency 2
0.00-maximumfrequency 0.00Hz × 030A
P2.11 Hopping frequency3
Hoppingfrequency 3
0.00-maximumfrequency 0.00Hz × 030B
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
55
Functioncode Parameter name LCD display Setting range Factory
setting Mod. MODBUS address
P2.12 Hopping frequencyamplitude
Hoppingfrequencyamplitude
0.00~15.00Hz 0.00Hz × 030C
P2.13 Multi-stagefrequency 1
Multi-stagefrequency 1
0.00-maximumfrequency
5.00 Hz
○
030D
P2.14 Multi-stagefrequency 2
Multi-stagefrequency 2 8.00 Hz 030E
P2.15 Multi-stagefrequency 3
Multi-stagefrequency 3 10.00 Hz 030F
P2.16 Multi-stagefrequency 4
Multi-stagefrequency 4 15.00 Hz 0310
P2.17 Multi-stagefrequency 5
Multi-stagefrequency 5 18.00 Hz 0311
P2.18 Multi-stagefrequency 6
Multi-stagefrequency 6 20.00 Hz 0312
P2.19 Multi-stagefrequency 7
Multi-stagefrequency 7 25.00 Hz 0313
P2.20 Multi-stagefrequency 8
Multi-stagefrequency 8 28.00 Hz 0314
P2.21 Multi-stagefrequency 9
Multi-stagefrequency 9 30.00 Hz 0315
P2.22 Multi-stagefrequency 10
Multi-stagefrequency 10 35.00 Hz 0316
P2.23 Multi-stagefrequency 11
Multi-stagefrequency 11 38.00 Hz 0317
P2.24 Multi-stagefrequency 12
Multi-stagefrequency 12 40.00 Hz 0318
P2.25 Multi-stagefrequency 13
Multi-stagefrequency 13 45.00 Hz 0319
P2.26 Multi-stagefrequency 14
Multi-stagefrequency 14 48.00 Hz 031A
P2.27 Multi-stagefrequency 15
Multi-stagefrequency 15 50.00 Hz 031B
P2.28 Acceleration time 2 Accelerationtime 2
Power ≤ 132kW0.1~3600s
Power ≥ 160kW1.0~3600s
22kW andbelow:
6.0sOthers:
20.0s
○
031C
P2.29 Deceleration time 2 Decelerationtime 2 031D
P2.30 Acceleration time 3 Accelerationtime 3 031E
P2.31 Deceleration time 3 Decelerationtime 3 031F
P2.32 Acceleration time 4 Accelerationtime 4 0320
P2.33 Deceleration time 4 Decelerationtime 4 0321
P2.34Deceleration timeduring abnormalstopping
Decelerationtime duringabnormalstopping
Power ≤ 132kW0.1~3600s
Power ≥ 160kW1.0~3600s
22kW andbelow:3.0sOthers:
10.0s
○ 0322
P2.35Multiplying factorof acceleration andslowdown time
Multiplyingfactor ofaccelerationand slowdowntime
0: 1 time1:10 times2:0.1 times
0 × 0323
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
56
Functioncode Parameter name LCD display Setting range Factory
setting Mod. MODBUS address
P2.36 Cooling fan control Fan control0: Automatic mode1: Running after power
on0 × 0324
P2.37 Wiring direction ofmotor
Wiringdirection ofmotor
0: Positive sequence1: Inverted sequence 0 × 0325
P2.38 Anti-reverseselection
Anti-reverseselection
0: Reverse rotation isactivated1: Reverse rotation isdisabled
0 × 0326
P2.39 Model of expandedIO card Expanded IO card
0: No1: YesReserve for 3004GB and
below models
0 × 0327
P2.40 Model of expandedPG card Expanded PG card
0: No1: YesReserve for 3004GB and
below models
0 × 0328
P2.41Extended PG outputfrequency dividingratio
Extended PGfrequencydividing ratio
1~128Reserve for 3004GBand below models
1 × 0329
P2.42 Extended PG pulsesper revolution
Extended PGpulses
1~9999Reserve for 3004GBand below models
1000 × 032A
P2.43 Extended PGdirection setting
Extended PGdirection
0: Phase A advancesduring positive rotation1: Phase B advancesduring positive rotationReserve for 3004GBand below models
0 × 032B
P2.44 Built-in PG pulsesper revolution
Built-in PGpulses 1~9999 1000 × 032C
P2.45 Built-in PGdirection setting
Built-in PGdirection
0: Phase A advancesduring positive rotation1: Phase B advancesduring positive rotation
0 × 032D
P2.46Selection of use ofspeed measurement
PG
Selection ofuse of PG
0: Use built-in PG1: Use expanded PG 0 × 032E
P2.47PG disconnectiondetection time(Reserve)
PGdisconnectiondetection time
0.0~10.0s 2.0 s × 032F
P2.48
Operation selectionin the event of PGdisconnection(Reserve)
PGdisconnectionoperation
0: Deceleration stopping1: Free stopping2: Abnormal stopping3: Continue to run
1 × 0330
P2.49 Number of PGreduction teeth 1
Number of PGreduction teeth1
1~1000 1 × 0331
P2.50 Number of PGreduction teeth 2
Number of PGreduction teeth2
1~1000 1 × 0332
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
57
P3: Switching value I / O terminal controlThis page is only for 3004GB and below models
Functioncode Parameter LCD display Setting range Factory
setting ModifyMODBUS
address
P3.00 Mode of terminalaction
Mode ofterminal action
0: Closing is active1: Open is active (normally
open / normally closed isunconstrained by this)
0 × 0400
P3.01 X1 terminalfunction
X1 terminalfunction
0: NULL not defined1: FWD Forward running2: REV Reverse running3: RUN4: F / R rotation direction5: HLD self-holding6: RST reset7: FC set frequency selection8: FJOG Forward jog9: RJOG Reverse jog
10: UP Go up11: DOWN Go down12: UP / DOWN reset13: FRE Free stopping14: Forced stopping (based on
deceleration time ofabnormal stopping)
15: Stopping process plus DCbraking
16: Acceleration anddeceleration prohibition17: Inverter run prohibition18: S1 multi-stage speed 119: S2 multi-stage speed 220: S3 multi-stage speed 321: S4 multi-stage speed 422: S5 multi-stage speed 523: S6 multi-stage speed 624: S7 multi-stage speed 725: Command to switch toterminal control 226: SS1 multi-stage speed27: SS2 multi-stage speed28: SS3 multi-stage speed29: SS4 multi-stage speed30: T1 acceleration anddeceleration time 131: T2 acceleration anddeceleration time 232: T3 acceleration anddeceleration time 333: T4 acceleration and
deceleration time 434: TT1 acceleration and
deceleration time35: TT2 acceleration and
deceleration time36: Forced stopping normally
closed37: EH0 external fault
1 × 0401
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
58
This page is only for 3004GB and below modelsFunction
code Parameter LCD display Setting range Factorysetting Modify
MODBUSaddress
normally open38: EH1 external fault
normally closed39: EI0 external interrupt
normally open40: EI1 external interrupt
normally closed41: Stopping state plus DC
braking(Continued on next page)
P3.02 X2 terminalfunction
X2 terminalfunction
(Contd.)42: PLC program input43: PLC program run pause44: PLC stopping reset45: Wobble frequency input46: Wobble frequency state
reset47: PID input48: Switch between speed
mode and torquemode
49: Timing driven input50: Counter trigger signal
input51: Counter reset52: Actual length reset53: Timing unit selection54-74: Reserve75: Anti-stall action command
(reserve)76: Zero servo command
(reserve)77: PID output is forced to 078: PID integral time reset79: Command to switch to
keypad control
2 × 0402
P3.03 X3 terminalfunction
X3 terminalfunction
0~79: ditto.80: PULSE Pulse input 37 × 0403
P3.04 X4 terminalfunction
X4 terminalfunction
0~79: ditto.81: Single-phase tachometer
pulse or biphasetachometer pulse phase Apulse input
0 × 0404
P3.05 X5 terminalfunction
X5 terminalfunction
0~79: ditto.81: Single-phase tachometer
pulse or two-phasetachometer pulse phase Apulse input (input of X4is active when both X4and X5 are 81)
82: Biphase speedmeasurement Phase Bpulse input phase
0 × 0405
P3.06 Reserve Reserve - - * 0406P3.07 Reserve Reserve - - * 0407
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
59
This page is only for 3004GB and below modelsFunction
code Parameter LCD display Setting range Factorysetting Modify
MODBUSaddress
P3.08 Reserve Reserve - - * 0408P3.09 Reserve Reserve - - * 0409P3.10 Reserve Reserve - - * 040AP3.11 Reserve Reserve - - * 040BP3.12 Reserve Reserve - - * 040C
P3.13 X terminal filtertime
X terminal filtertime 0.002s~1.000s 0.010s ○ 040D
P3.14 Reserve Reserve - - * 040E
P3.15 Operation modesetting
Operation modesetting
0: Two-wire operation mode 11: Two-wire operation mode 22: Three-wire operation mode
1 - self hold function(attach any one of X1 ~X5 terminals)
3: Three-wire operation mode2 - self hold function(attach any one of X1 ~X5 terminals)
0 × 040F
P3.16Terminal UP /DOWNSpeed
UP / DOWNspeed 0.01~99.99Hz/s 1.00
Hz/s ○ 0410
P3.17 Amplitude of UP /DOWN set point
Amplitude of UP/ DOWN setpoint
0.00~upper limit frequency 10.00Hz × 0411
P3.18Digital frequencyUP / DOWNstorage options
UP / DOWNstorage options
0: UP / DOWN set point isreset to 0 after receivingSTOP
1: UP / DOWN set point not isreset to 0 after receivingSTOP, which will not saveafter power off
2: UP / DOWN set point not isreset to 0 after receivingSTOP, which will saveafter power off; whenP0.03 is set to 1, P0.02adjusts power failuresaving online.
2 × 0412
P3.19 D0 terminalfunction
D0 terminalfunction
0: NULL not defined1: RUN2: FAR frequency reaching3: FDT frequency detection4: FDTH upper limit
frequency reaching5: FDTL lower limit
frequency reaching6: upper and lower limits of
wobble frequency7: Inverter is in zero speed
operation8: Simple PLC stage
operation completionindication
0 × 0413
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
60
This page is only for 3004GB and below modelsFunction
code Parameter LCD display Setting range Factorysetting Modify
MODBUSaddress
9: PLC cycle completionindication
10: Completion of readinessfor operation of inverter(RDY)
11: Free stopping12: Auto restart13: Timing reaching14: Counting reaching output15: Set running time reaching16: Torque reaching detection17: CL current-limit action18: Overvoltage stall19: Inverter failure20: External fault stopping
(EXT)21: Uu1 undervoltage
stopping22: CE communication alarm23: Overload detection signal
(OLP)24: Abnormality of analog
signal 125: Abnormality of analog
signal 226: Reserve27: Reserve28: Cut-to-length reaching,level signal29: Sleeping30: Zero speed31: Zero servo state (reserve)32: Reverse control signal(reserve)33: Actual direction ofrotation34: Reserve35: Underload detection signal
(ULP)P3.20 Reserve Reserve - - * 0414P3.21 Reserve Reserve - - * 0415P3.22 Reserve Reserve - - * 0416P3.23 Reserve Reserve - - * 0417
P3.24
Relay 1(TA/TB/TC)Output functionselection
Relay output 0 to 35: the same with P3.19 19 × 0418
P3.25Cut-to-lengthreaching terminaloutput hold time
Cut-to-lengthoutput hold 0.0~3.0s 1.0s × 0419
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
61
This page is only for 35R5GB and above models
Functioncode
Parameter LCD display Setting rangeFactorysetting
Mod.
MODBUSaddress
P3.00 Mode of terminalaction
Mode ofterminal action
0: Closing is active1: Open is active (normally
open / normally closed isunconstrained by this)
0 × 0400
P3.01 X1 terminalfunction
X1 terminalfunction
0: NULL not defined1: FWD Forward running2: REV Reverse running3: RUN4: F / R rotation direction5: HLD self-holding6: RST reset7: FC set frequency selection8: FJOG Forward jog9: RJOG Reverse jog
10: UP Go up11: DOWN Go down12: UP / DOWN reset13: FRE Free stopping14: Forced stopping (based on
deceleration time ofabnormal stopping)
15: Stopping process plus DCbraking
16: Acceleration anddeceleration prohibition
17: Inverter run prohibition18: S1 multi-stage speed 119: S2 multi-stage speed 220: S3 multi-stage speed 321: S4 multi-stage speed 422: S5 multi-stage speed 523: S6 multi-stage speed 624: S7 multi-stage speed 725: Command to switch to
terminal control 226: SS1 multi-stage speed27: SS2 multi-stage speed28: SS3 multi-stage speed29: SS4 multi-stage speed30: T1 acceleration and
deceleration time 131: T2 acceleration and
deceleration time 232: T3 acceleration and
deceleration time 333: T4 acceleration and
deceleration time 434: TT1 acceleration and
deceleration time35: TT2 acceleration and
deceleration time36: Forced stopping normally
closed
1 × 0401
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
62
This page is only for 35R5GB and above models
Functioncode
Parameter LCD display Setting rangeFactorysetting
Mod.
MODBUSaddress
37: EH0 external faultnormally open
38: EH1 external faultnormally closed
39: EI0 external interruptnormally open
40: EI1 external interruptnormally closed
41: Stopping state plus DCbraking
(Continued on next page)
P3.02 X2 terminalfunction
X2 terminalfunction
(Contd.)42: PLC program input43: PLC program run pause44: PLC stopping reset45: Wobble frequency input46: Wobble frequency state
reset47: PID input48: Switch between speed
mode and torquemode
49: Timing driven input50: Counter trigger signal
input51: Counter reset52: Actual length reset53: Timing unit selection54-74: Reserve75: Anti-locked rotor
operation command(reserve)
76: Zero servo command(reserve)
77: PID output is forced to 078: PID integral time reset79: Command to switch tokeypad control
2 × 0402
P3.03 X3 terminalfunction
X3 terminalfunction 37 × 0403
P3.04 X4 terminalfunction
X4 terminalfunction
0~79: ditto.80: PULSE Pulse input 0 × 0404
P3.05 X5 terminalfunction
X5 terminalfunction
0~79: ditto.81: Single-phase tachometer
pulse or biphasetachometer pulse phase Apulse input
0 × 0405
P3.06 X6 terminalfunction
X6 terminalfunction
0~79: ditto.81: Single-phase tachometer
pulse or two-phasetachometer pulse phase Apulse input (input of X5is active when both X5and X6 are 81)
82: Biphase speed
0 × 0406
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
63
This page is only for 35R5GB and above models
Functioncode
Parameter LCD display Setting rangeFactorysetting
Mod.
MODBUSaddress
measurement Phase Bpulse input phase
P3.07 X7 terminalfunction
X7 terminalfunction
0~79: ditto.
0 × 0407
P3.08 X8 terminalfunction
X8 terminalfunction 0 × 0408
P3.09 X9 terminalfunction
X9 terminalfunction 0 × 0409
P3.10 X10 terminalfunction
X10 terminalfunction 0 × 040A
P3.11 Reserve Reserve - - * 040BP3.12 Reserve Reserve - - * 040C
P3.13 X terminal filtertime
X terminal filtertime 0.002s~1.000s 0.010s ○ 040D
P3.14 Reserve Reserve - - * 040E
P3.15 Operation modesetting
Operation modesetting
0: Two-wire operation mode 11: Two-wire operation mode 22: Three-wire operation mode
1 - self hold function(attach any one of X1 ~X10 terminals)
3: Three-wire operation mode2 - self hold function (attachany one of X1 ~ X10terminals)
0 × 040F
P3.16 Terminal UP /DOWN speed
UP / DOWNspeed 0.01~99.99Hz/s 1.00
Hz/s ○ 0410
P3.17 Amplitude of UP /DOWN set point
Amplitude of UP/ DOWN setpoint
0.00~upper limit frequency 10.00Hz × 0411
P3.18Digital frequencyUP / DOWNstorage options
UP / DOWNstorage options
0: UP / DOWN set point isreset to 0 after receivingSTOP
1: UP / DOWN set point not isreset to 0 after receivingSTOP, which will not saveafter power off
2: UP / DOWN set point not isreset to 0 after receivingSTOP, which will saveafter power off; whenP0.03 is set to 1, P0.02adjusts power failuresaving online.
2 × 0412
P3.19 D0 terminalfunction
D0 terminalfunction
0: NULL not defined1: RUN2: FAR frequency reaching3: FDT frequency detection4: FDTH upper limit
frequency reaching5: FDTL lower limit
frequency reaching
0 × 0413
P3.20 Y1 terminalfunction
Y1 terminalfunction 1 × 0414
P3.21 Y2 terminalfunction
Y2 terminalfunction 0 × 0415
P3.22 Y3 terminalfunction
Y3 terminalfunction 0 × 0416
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
64
This page is only for 35R5GB and above models
Functioncode
Parameter LCD display Setting rangeFactorysetting
Mod.
MODBUSaddress
6: upper and lower limits ofwobble frequency
7: Inverter is in zero speedoperation
8: Simple PLC stageoperation completionindication
9: PLC cycle completionindication
10: Completion of readinessfor operation of inverter(RDY)
11: Free stopping12: Auto restart13: Time reaching14: Counting reaching output15: Set running time reaching16: Torque reaching detection17: CL current-limit action18: Overvoltage stall19: Inverter failure20: External fault stopping
(EXT)21: Uu1 undervoltage
stopping22: CE communication alarm23: Overload detection signal
(OLP)24: Abnormality of analog
signal 125: Abnormality of analog
signal 226: STEP Steps of program
running(Valid for DO \ Y1 \ Y2 \Y3, 26 is required to set)
27: Fault type output(Valid for DO \ Y1 \ Y2,27 is required to set)
(Continued on next page)
P3.23 reserve reserve 0 × 0417
P3.24
Relay 1(TA / TB / TC)Output functionselection
Relay 1 output
(Contd.)28: Cut-to-length reaching,
level signal29: Sleeping30: Zero speed31: Zero servo state (reserve)32: Reverse control signal
(reserve)33: Actual direction of
rotationthirty-four: Abnormality of
analog signal 335: Underload detection signal
19 × 0418
P3.25
Relay 2(BRA/BRB/BRC)Output functionselection
Relay 2 output 0 × 0419
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
65
This page is only for 35R5GB and above models
Functioncode
Parameter LCD display Setting rangeFactorysetting
Mod.
MODBUSaddress
(ULP)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
66
Function
code Parameter LCD display Setting rangeFactorysetting
Modify
MODBUS
address
P3.26Frequencyreaching FARdetection width
FAR width 0.00~10.00Hz 2.50Hz ○ 041A
P3.27 FDT level FDT level 0.00-maximumfrequency 50.00Hz ○ 041B
P3.28 FDT lag FDT lag 0.00~10.00Hz 1.00Hz ○ 041C
P3.29
Upper limitfrequencyreaching terminaloutput delay time
Upper limitfrequency outputdelay
0.0~100.0s 0.0s ○ 041D
P3.30
Lower limitfrequencyreaching terminaloutput delay time
Lower limitfrequency outputdelay
0.0~100.0s 0.0s ○ 041E
P3.31 Torque detectionset point
Torque detectionsetting 0.0~200.0% 100.0% ○ 041F
P3.32 Count valuereaching setting
Count valuereaching setting 0~9999 0 ○ 0420
P3.33 Timing reachingsetting
Timing reachingsetting 0.0~6553.0 0.0 ○ 0421
P3.34 Set running time Set running time 0~65530h 65530h × 0422
P3.35 Underloaddetection set point
Underload detectionsetting 0.0~200.0% 10.0% ○ 0423
P3.36Underloaddetection terminaloutput delay time
Underload terminaloutput delay 0.0~100.0s 5.0s ○ 0424
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
67
P4: Analog and pulse input and output terminalsFunctioncode Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P4.00 Analog nonlinearselection
Analognonlinearselection
0: No 1: AI12: AI2 3: Pulse 0 × 0500
P4.01 Input value of AI1minimum analog
AI1 minimumanalog 0.00~P4.03 0.00V ○ 0501
P4.02
Correspondingphysical quantity ofinput value of AI1minimum analog
Minimumcorrespondingphysical quantityof AI1
-100.0%~100.0% 0.0% ○ 0502
P4.03 Input value of AI1maximum analog
AI1 maximumanalog P4.01~10.00V 10.00V ○ 0503
P4.04
Correspondingphysical quantity ofinput value of AI1maximum analog
Maximumcorrespondingphysical quantityof AI1
-100.0%~100.0% 100.0% ○ 0504
P4.05 AI1 input filter timeconstant
AI1 input filtertime 0.01~50.00s 0.05s ○ 0505
P4.06 Input value of AI2minimum analog
AI2 minimumanalog 0.00~P4.08 0.00V ○ 0506
P4.07
Correspondingphysical quantity ofinput value of AI2minimum analog
Minimumcorrespondingphysical quantityof AI2
-100.0%~100.0% 0.0% ○ 0507
P4.08 Input value of AI2maximum analog
AI2 maximumanalog P4.06~10.00V 10.00V ○ 0508
P4.09
Correspondingphysical quantity ofinput value of AI2maximum analog
Maximumcorrespondingphysical quantityof AI2
-100.0%~100.0% 100.0% ○ 0509
P4.10 AI2 input filter timeconstant
AI2 input filtertime 0.01~50.00s 0.05s ○ 050A
P4.11 Minimum pulse inputvalue
Minimum pulseinput value 0.00~P4.13 0.00
kHz ○ 050B
P4.12
Correspondingphysical quantity ofinput value ofminimum pulsequantity
Correspondingphysical quantityof minimumpulse quantityinput
-100.0%~100.0% 0.0% ○ 050C
P4.13Input value ofmaximum pulsequantity
Input value ofmaximum pulsequantity
P4.11~50.00kHz 50.00kHz ○ 050D
P4.14
Correspondingphysical quantity ofinput value ofmaximum pulsequantity
Correspondingphysical quantityof maximumpulse quantityinput
-100.0%~100.0% 100.0% ○ 050E
P4.15 Pulse input filter time Pulse input filtertime 0.01~50.00s 0.05s ○ 050F
P4.16 Input value of AI3minimum analog
AI3 minimumanalog
-10.00V~P4.18Reserve for 3004GBand below models
0.00V ○ 0510
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
68
Functioncode Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P4.17
Correspondingphysical quantity ofinput value of AI3minimum analog
Minimumcorrespondingphysical quantityof AI3
-100.0%~100.0%Reserve for 3004GBand below models
0.0% ○ 0511
P4.18 Input value of AI3maximum analog
AI3 maximumanalog
P4.16~10.00VReserve for 3004GBand below models
10.00V ○ 0512
P4.19
Correspondingphysical quantity ofinput value of AI3maximum analog
Maximumcorrespondingphysical quantityof AI3
-100.0%~100.0%Reserve for 3004GBand below models
100.0% ○ 0513
P4.20 AI3 input filter timeconstant
AI3 input filtertime
0.01~50.00sReserve for 3004GBand below models
0.05s ○ 0514
P4.21 AO1 functiondefinition
AO1 terminaloutput
0: NULL1: Output current (0 to 2times of rated current ofthe inverter) 2: Outputvoltage (0 ~ maximumvoltage)3: PID setting (0 ~ 10V)4: PID feedback (0 ~10V)5: Calibration signal(5V)6: Output torque (0 ~ 2times of the rated torqueof the motor)7: Output power (0 ~ 2times of the rated powerof the inverter)8: Bus voltage (0 ~1000V)9: AI1(0~10V/4~20mA)10: AI2(0~10V/4~20mA)11: AI3 (0 ~ 10Vcorresponds to-10V ~10V)12: Output frequencybefore compensation (0~ maximum frequency)13: Output frequencyafter compensation (0 ~maximum frequency)14: Running speed (0 to2 times of the ratedspeed)
0 × 0515
P4.22
AO2 functiondefinition (reservefor 3004GB andbelow models)
AO2 terminaloutput 0 × 0516
P4.23
AO3 functiondefinition(Reserve for 3004GBand below models)
AO3 terminaloutput 0 × 0517
P4.24 DO output D0 output 0~ fourteen, ditto. 0 × 0518
P4.25 AO1 output rangeselection
AO1 outputrange selection
0: 0~10V/0~20mA1: 2~10V/4-20mA 0 ○ 0519
P4.26 AO2 output rangeselection
AO2 outputrange selection
0: 0~10V/0~20mA1: 2~10V/4-20mAReserve for 3004GBand below models
0 ○ 051A
P4.27 AO3 output rangeselection
AO3 outputrange selection 0 ○ 051B
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
69
Functioncode Parameter LCD display Setting range Factory
setting Mod.MODBUSaddress
P4.28 AO1 Gain AO1 Gain -10.00~10.00 1.00 ○ 051CP4.29 AO2 Gain AO2 Gain -10.00~10.00
Reserve for 3004GBand below models
1.00 ○ 051D
P4.30 AO3 Gain AO3 Gain 1.00 ○ 051E
P4.31 AO1 offset AO1 offset -100.0%~100.0% 0.0% ○ 051FP4.32 AO2 offset AO2 offset -100.0%~100.0%
Reserve for 3004GBand below models
0.0% ○ 0520
P4.33 AO3 offset AO3 offset 0.0% ○ 0521
P4.34 DO maximum outputfrequency
DO maximumoutput frequency
DO minimum outputfrequency ~50.00KHz
10.00KHz ○ 0522
P4.35 DO minimum outputfrequency
DO minimumoutput frequency
0,0.08 KHz ~ DOmaximum outputfrequency
0.00KHz ○ 0523
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
70
P5: PLC runFunctioncode
Parameter LCD display Setting range
Factorysetting
Mod.
MODBUSaddress
P5.00 Program run mode Program run mode
0: Single cycle 11: Single cycle 2 (keeping
the final value)2: Continuous cycle
2 × 0600
P5.01Selection of PLCinterrupt operationre-start mode
PLC interruptre-start options
0: Start running from thefirst stage
1: Continue to run at thestage frequency at themoment of interrupt
2: Continue to run at theoperation frequency atthe moment of interrupt
0 × 0601
P5.02
PLC state parametersaving options at themoment of powerfailure
PLC state savingoptions at themoment of powerfailure
0: Not save a: SaveProgram running recordswill be automaticallycleared when the parameteris set to 0
0 × 0602
P5.03 Selection of stagetime unit
Selection of stagetime unit 0: sec one: min 0 × 0603
P5.04 Program runningtiming T1
Program runningtime 1 0.1~3600 10.0 ○ 0604
P5.05 Program runningtiming T2
Program runningtime 2
0.0~3600
10.0 ○ 0605
P5.06 Program runningtiming T3
Program runningtime 3 10.0 ○ 0606
P5.07 Program runningtiming T4
Program runningtime 4 10.0 ○ 0607
P5.08 Program runningtiming T5
Program runningtime 5 10.0 ○ 0608
P5.09 Program runningtiming T6
Program runningtime 6 10.0 ○ 0609
P5.10 Program runningtiming T7
Program runningtime 7 10.0 ○ 060A
P5.11 Program runningtiming T8
Program runningtime 8 10.0 ○ 060B
P5.12 Program runningtiming T9
Program runningtime 9 10.0 ○ 060C
P5.13 Program runningtiming T10
Program runningtime 10 10.0 ○ 060D
P5.14 Program runningtiming T11
Program runningtime 11 10.0 ○ 060E
P5.15 Program runningtiming T12
Program runningtime 12 10.0 ○ 060F
P5.16 Program runningtiming T13
Program runningtime 13 10.0 ○ 0610
P5.17 Program runningtiming T14
Program runningtime 14 10.0 ○ 0611
P5.18 Program runningtiming T15
Program runningtime 15 10.0 ○ 0612
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
71
Functioncode
Parameter LCD display Setting range
Factorysetting
Mod.
MODBUSaddress
P5.19 Setting of programrunning on T1 stage
Program runningsetting 1
1 F/r ~ 4 F/r
1F ○ 0613
P5.20 Setting of programrunning on T2 stage
Program runningsetting 2 1F ○ 0614
P5.21 Setting of programrunning on T3 stage
Program runningsetting 3 1F ○ 0615
P5.22 Setting of programrunning on T4 stage
Program runningsetting 4 1F ○ 0616
P5.23 Setting of programrunning on T5 stage
Program runningsetting 5 1F ○ 0617
P5.24 Setting of programrunning on T6 stage
Program runningsetting 6 1F ○ 0618
P5.25 Setting of programrunning on T7 stage
Program runningsetting 7 1F ○ 0619
P5.26 Setting of programrunning on T8 stage
Program runningsetting 8 1F ○ 061A
P5.27 Setting of programrunning on T9 stage
Program runningsetting 9 1F ○ 061B
P5.28 Setting of programrunning on T10 stage
Program runningsetting 10 1F ○ 061C
P5.29 Setting of programrunning on T11 stage
Program runningsetting 11 1F ○ 061D
P5.30 Setting of programrunning on T12 stage
Program runningsetting 12 1F ○ 061E
P5.31 Setting of programrunning on T13 stage
Program runningsetting 13 1F ○ 061F
P5.32 Setting of programrunning on T14 stage
Program runningsetting 14 1F ○ 0620
P5.33 Setting of programrunning on T15 stage
Program runningsetting 14 1F ○ 0621
P5.34 Clear programrunning record
Clear programrecord
0: Not clear 1: ClearAutomatically recover to 0after clearing
0 × 0622
P5.35Record of number ofstages of programrunning
Number of stages ofprogram running 0~15 0 * 0623
P5.36Time of programrunning through thestage
Run time 0.0~3600 0.0 * 0624
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
72
P6: Cut-to-length and textile wobble frequencyFuncti
oncode Parameter LCD display Setting range
Factorysetting
Modify
MODBUS
address
P6.00 Set length Set lengthMax (0.000,-P6.06) (fixed lengthstopping function is inactive) ~65.53 m
0.000 m ○ 0700
P6.01 Actual length Actuallength
0.000 ~ 65.53 m (save after powerfailure) 0.000 m * 0701
P6.02Lengthmultiplyingfactor
Lengthmultiplyingfactor
0.001~30.00 1.000 ○ 0702
P6.03Lengthcorrectionfactor
Lengthcorrection 0.001~1.000 1.000 ○ 0703
P6.04 Measurementperimeter
Measurement perimeter 0.10~100.0 cm 10.00 cm ○ 0704
P6.05 Decelerationpoint
Decelerationpoint 50~100 % 90 % × 0705
P6.06 Amount ofdeviation
Amount ofdeviation Max (-200.0, -P6.00) ~200.0 mm 0.0 mm × 0706
P6.07
Start modefor stoppingat wobblefrequency
Start atwobblefrequency
0: Start according to the statebefore stopping1: Re-start
0 × 0707
P6.08
Save afterpower failurein wobblefrequencystate
Wobblefrequencysave
0: Not save after power failure1: Save after power failure 0 × 0708
P6.09 Preset wobblefrequency
Presetwobblefrequency
35R5GB and above:0.00~400.0Hz3004GB and below: 0.00~650.0Hz
0.00Hz ○ 0709
P6.10
Waiting timeof presetwobblefrequency
Waiting timeof presetwobblefrequency
0.0~3600s 0.0s ○ 070A
P6.11 Amplitude ofoscillation
Amplitudeofoscillation
0.0-50.0% (relative to P0.02) 0.0% ○ 070B
P6.12 Stepfrequency
Stepfrequency 0.0-50.0% (relative to P6.11) 0.0% ○ 070C
P6.13 Step time Step time 5~50ms 5ms ○ 070D
P6.14Wobblefrequencycycle
Wobblefrequencycycle
0.1~999.9s 10.0s ○ 070E
P6.15 Swing ratio Swing ratio 0.1~10.0 1.0 ○ 070F
P6.16Stochasticswingselection
Stochasticswingselection
0: Invalid stochastic swing1: Valid stochastic swing 0 ○ 0710
P6.17Stochasticswing ratioMAX
Stochasticswing ratioMAX
0.1~10.0 10.0 ○ 0711
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
73
P6.18Stochasticswing ratioMIN
Stochasticswing ratioMIN
0.1~10.0 0.1 ○ 0712
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
74
P7: PID controlFunctioncode
Parametername LCD display Setting range Factory
setting
Modification
MODBUSaddress
P7.00 PID settingsource 1
PID settingsource 1
0: PID digital setting1: AI1 terminal2: AI2 terminal3: Terminal AI3 (reserve for
3004GB and below models)
4: Pulse input5: Serial communication
0 × 0800
P7.01 PID settingsource 2
PID settingsource 2 0~ 5: ditto. 0 × 0801
P7.02 Combination offixed variables
Combinationof fixedvariables
0: PID setting source 11: PID setting source 22: Min (PID setting source 1, PID
setting source 2)
3: Max (PID setting source 1, PIDsetting source 2)
4: PID setting source 1 + PIDsetting source 2
5: PID setting source 1 - PIDsetting source 2
6: PID setting source 1 x PIDsetting source 2
7: PID setting source 1 ÷ PIDsetting source 2
0 × 0802
P7.03 PID feedbacksource 1
PID feedbacksource 1
0: Built-in PG or single-phasespeed measurement input
1: AI1 terminal2: AI2 terminal3: Terminal AI3 (reserve for
3004GB and below models)
4: Pulse input5: Serial communication
0 × 0803
P7.04 PID feedbacksource 2
PID feedbacksource 2
0: Extended PG card speedmeasurement input
1~ 5: ditto.0 × 0804
P7.05Combination offeedbackquantity
Combinationof feedbackquantity
0: PID feedback source 11: PID feedback source 22: MIN (PID feedback source 1,
PID feedback source 2)
3: MAX (PID feedback source 1,PID feedback source 2)
4: PID feedback source 1 + PIDfeedback source 2
5: PID feedback source 1-PIDfeedback source 2
0 × 0805
P7.06 Analog PIDdigital setting
Analog PIDdigital setting
-1000.0-1000.0, subject tolimitation of setting range 0.0 ○ 0806
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
75
Functioncode
Parametername LCD display Setting range Factory
setting
Modification
MODBUSaddress
P7.07 Analog PIDsetting range
Analog PIDsetting range 1.0~1000.0 100.0 ○ 0807
P7.08 Speed PIDdigital setting
SpeedPID
digital setting0~24000rpm 0rpm ○ 0808
P7.09 Proportionalgain 1 Scale factor 1 0.1~30.0 12.0 ○ 0809
P7.10 PID integraltime 1
Integral time1 0.00~100.0s 0.60s ○ 080A
P7.11 PID derivativetime 1
Derivativetime 1 0.00~1.00s 0.00s ○ 080B
P7.12 Switchingfrequency 1
Switchingfrequency 1 0.00 ~ switching frequency 2 5.00Hz ○ 080C
P7.13 Proportionalgain 2 Scale factor 2 0.1~30.0 6.0 ○ 080D
P7.14 PID integraltime 2
Integral time2 0.00~100.0s 1.00s ○ 080E
P7.15 PID derivativetime 2
Differentialtime 2 0.00~1.00s 0.00s ○ 080F
P7.16 Switchingfrequency 2
Switchingfrequency 2
Switching frequency 1 ~ maximumfrequency
20.00Hz ○ 0810
P7.17 Differentialobject selection
Differentialobjectselection
0: Feedback differentiation1: Derivation differentiation 0 × 0811
P7.18 PID integralamplitude limit
PID integralamplitudelimit
0.0%~100.0%Maximum output frequency is100%
20.0% ○ 0812
P7.19PIDdifferentiationamplitude limit
PIDdifferentiationamplitudelimit
0.0%~100.0%Maximum output frequency is100%
5.0% ○ 0813
P7.20 PID outputamplitude limit
PID outputamplitudelimit
0.0%~100.0%Maximum output frequency is100%
100.0% ○ 0814
P7.21 PID delay timeconstant
PID delaytime 0.00~25.00s 0.00s ○ 0815
P7.22 Error margin Error margin 0.0~999.9 0.0 ○ 0816
P7.23 PID regulationcharacteristics
PIDregulationcharacteristics
0: Direct action 1: Reaction 0 × 0817
P7.24 Integral controlselection
Integralcontrolselection
0: Stop integral control when thefrequency reaches the upper andlower limit
1: Continue integral control whenthe frequency reaches the upperand lower limit
0 × 0818
P7.25 Enablehibernation
Enablehibernation 0: Disable 1: Enable 0 × 0819
P7.26 Sleep delay Sleep delay 0~999s 120s ○ 081A
P7.27 Sleep threshold Sleepthreshold 0~upper limit frequency 20.00
Hz ○ 081B
P7.28 Wake-upthreshold
Wake-upthreshold 0.0~999.9 3.0 ○ 081C
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
76
P8: Vector control parametersFunctioncode
Parameter LCD display Setting range Factorysetting
Modification
MODBUSaddress
P8.00
Pre-excitationcurrentcompensationamount
Pre-excitationcurrentcompensation
0.0~500.0%100.0% corresponds to themotor no-load current; theresponse time is set in P1.04The upper limit is 80% of therated current of the inverter orthe smaller rated current of themotor
100.0% × 0900
P8.01Speed loopproportional gain1
Speed loopproportionalgain 1
0.1~30.0 10.0 ○ 0901
P8.02 Speed loopintegral time 1
Speed loopintegral time 1 0.001~10.000s 0.200s ○ 0902
P8.03Speed loopswitchingfrequency 1
Speed loopswitchingfrequency 1
0.00Hz ~ speed loop switchingfrequency 2 5.00Hz ○ 0903
P8.04Speed loopproportional gain2
Speed loopproportionalgain 2
0.1~30.0 10.0 ○ 0904
P8.05 Speed loopintegral time 2
Speed loopintegral time 2 0.001~10.000s 0.600s ○ 0905
P8.06Speed loopswitchingfrequency 2
Speed loopswitchingfrequency 2
Speed loop switching frequency1 ~ maximum frequency
10.00Hz ○ 0906
P8.07 Speed loop filtertime
Speed loopfilter time 0.000s~0.100s 0.030s ○ 0907
P8.08 Current loopproportional gain
Current loopproportionalgain
0.1~9.9 1.0 ○ 0908
P8.09 Current loopintegral time
Current loopintegral time 0.001~1.000s 0.100s ○ 0909
P8.10 Torque controlmode Torque mode
0: Run in speed control mode1: Run in torque control mode2: Run in moment motor mode
0 ○ 090A
P8.11 Driving torquesetting source
Driving torquesetting source
0: Digital setting1: AI12: AI23: AI3 (reserve for 3004GB and
below models)
4: Pulse input5: Serial communication
0 × 090B
P8.12 Upper limit ofdrive torque
Upper limit ofdrive torque 0.0%~200.0% 160% ○ 090C
P8.13 Upper limit ofbraking torque
Upper limit ofbraking torque 0.0%~200.0% 160% ○ 090D
P8.14Instruction slipcompensationcoefficient
Instruction slipcompensationcoefficient
0.0%~200.0% 102.4% ○ 090E
P8.15 Torqueacceleration time
Torqueaccelerationtime
0.00~120.0s 0.50s ○ 090F
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
77
Functioncode
Parameter LCD display Setting range Factorysetting
Modification
MODBUSaddress
P8.16 Torquedeceleration time
Torquedecelerationtime
0.00~120.0s 0.50s ○ 0910
P8.17Estimated lowspeed slipcompensation
Estimated lowspeed slipcompensation
50.0%~200.0% 130.0% ○ 0911
P8.18Estimated highspeed slipcompensation
Estimated highspeed slipcompensation
50.0%~200.0% 117.0% ○ 0912
P8.19Zero servofunction isenabled (reserve)
Zero servofunction isenabled
0: Disable zero servo function1: Enable Zero servo function 0 ○ 0913
P8.20Zero servo startfrequency(reserve)
Zero servo startfrequency 0.00~10.00Hz 0.30Hz ○ 0914
P8.21Zero servo gain(reserve) Zero servo gain
(reserve) 1.00~99.99 1.00 × 0915
P8.22
Zero servotolerance(reserve)
Zero servotolerance(reserve)
0~16383 10 × 0916
P8.23 Zero speedtorque lifting
Zero speedtorque lifting 0.0~50.0% 0.0% ○ 0917
P8.24 Zero speedthreshold
Zero speedthreshold 0-20% (maximum frequency) 5% ○ 0918
P8.25 Braking torquesetting source
Braking torquesetting source
0: The same with the final drivetorque set point calculatedwith P8.11
1: AI12: AI23: AI3 (reserve for 3004GB and
below models)
4: Pulse input5: Serial communication
0 × 0919
P8.26
High-speedtorquecompensationgain
High-speedtorquecompensationgain
40.0%~160.0% 100.0% ○ 091A
P8.27
High-speedtorquecompensationbasis
High-speedtorquecompensationbasis
0: Compensate according to theoperating frequency
1: Compensate according to theline speed (reserve)
0 ○ 091B
P8.28 Pre-excitationtime
Pre-excitationtime 0.05~3.00s 0.2s ○ 091C
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
78
P9: V / F control parameterFunctioncode
Parameter name LCD display
Setting range Factorysetting
Modification
MODBUSaddress
P9.00 V / F curvesetting
V / F curvesetting
0: Constant torquecharacteristic curve 0
1: Lower torquecharacteristic curve 1(2.0)
2: Lower torquecharacteristic curve 2(1.5)
3: Lower torquecharacteristic curve 3(1.2)
4: User sets V / F curve(determined by P9.01 ~
P9.06 function code)
0 × 0A00
P9.01 V/F frequencyF1
V/F frequency1
0.0~P9.03 10.00Hz × 0A01
P9.02 V/F voltage V1 V/F voltage 1 0.0~100.0% 20.0% × 0A02
P9.03 V/F frequencyF2
V/F frequency2
P9.01~P9.05 25.00Hz × 0A03
P9.04 V/F voltage V2 V/F voltage 2 0.0~100.0% 50.0% × 0A04
P9.05 V/F frequencyF3
V/F frequency3
P9.03~P0.09 40.00Hz × 0A05
P9.06 V/F voltage V3 V/F voltage 3 0~100.0% 80.0% × 0A06
P9.07 Torque lifting Torque lifting0.0: Automatic torquelifting0.1-30.0%: Manual lifting
0.0% ○ 0A07
P9.08Manual torquelifting cutoffpoint
Lifting cutoffpoint
0.00~50.00Hz 16.67Hz ○ 0A08
P9.09 Slip frequencycompensation
Slip frequencycompensation
0.0-250.0% (rated torque is100%)
0.0% ○ 0A09
P9.10Slipcompensationtime constant
Compensationtime constant
0.01~2.55s 0.20s ○ 0A0A
P9.11 Energy efficientcontrol selection
Energyefficientcontrolselection
0: Energy efficient controlis disabled1: Energy efficient controlis enabled
0 × 0A0B
P9.12 Energy efficientgain coefficient
Energyefficient gaincoefficient
0.00~655.3 Depend onmodel
× 0A0C
P9.13Energy efficientvoltage lowerlimit (50Hz)
Energyefficientvoltage lowerlimit
0~120% 50% × 0A0D
P9.14Energy efficientvoltage lowerlimit (5Hz)
Energyefficientvoltage lowerlimit
0~25% 12% × 0A0E
P9.15 Average powertime
Average powertime
(1~200)×(25ms) 5 × 0A0F
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
79
Functioncode
Parameter name LCD display
Setting range Factorysetting
Modification
MODBUSaddress
P9.16 AVR function AVR function
0: Failure to actuate1: Run all the time2: Not act only duringdeceleration
2 × 0A10
P9.17 Overmodulationaction
Overmodulation action
0: Invalid 1: Valid 0 × 0A11
P9.18Droop control(loaddistribution)
Droop control0.00~10.00Hz 0.00Hz ○ 0A12
P9.19 Output voltageoffset source
Output voltageoffset source
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (reserve
for 3004GB and belowmodels)
4: Pulse input5: Communication settingMaximum output voltage is
100%Valid only in V / F
separation mode
0 × 0A13
P9.20 Output voltageoffset
Output voltageoffset
0.0%~100.0% 0.0% ○ 0A14
P9.21Oscillationsuppressioncoefficient
Oscillationsuppressioncoefficient
0~100 0 ○ 0A15
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
80
PA: motor parametersFunctioncode
Parameter name LCD display Setting range Factorysetting
Modification
MODBUSaddress
PA.00 Motor selection Motor selection 0: Use motor 11: Use motor 2 0 × 0B00
PA.01 Number of poles ofmotor 1
Number ofpoles 2~56 4 × 0B01
PA.02 Rated power of motor1 Rated power 0.4~999.9kW
Depend onmodel
× 0B02
PA.03 Rated speed of motor 1 Rated speed 0~24000r/min ○ 0B03
PA.04 Rated current of motor1 Rated current 0.1~999.9A × 0B04
PA.05 No-load current I0 ofmotor 1 No-load current 0.1~999.9A × 0B05
PA.06 Stator resistance R1 ofmotor 1
Statorresistance R1 0.001~65.000Ω ○ 0B06
PA.07Stator leakageinductance L1 ofmotor 1
Stator leakageinductance L1 0.1~2000.0mH ○ 0B07
PA.08 Rotor resistance R2 ofmotor 1
Rotorresistance R2 0.001~65.000Ω ○ 0B08
PA.09Mutual inductanceresistance Lm of motor1
Mutualinductanceresistance Lm
0.1~2000.0mH ○ 0B09
PA.10 Saturation coefficient1 of motor 1
Saturationcoefficient 1 0.0%~100.0% ○ 0B0A
PA.11 Saturation coefficient1 of motor 2
Saturationcoefficient 2 0.0%~100.0% ○ 0B0B
PA.12 Saturation coefficient3 of motor 1
Saturationcoefficient 3 0.0%~100.0% ○ 0B0C
PA.13 Saturation coefficient4 of motor 1
Saturationcoefficient 4 0.0%~100.0% ○ 0C0D
PA.14 Saturation coefficient5 of motor 1
Saturationcoefficient 5 0.0%~100.0% ○ 0B0E
PA.15 Number of poles ofmotor 2
Number ofpoles 2~56 4 × 0B0F
PA.16 Rated power of motor2 Rated power 0.4~999.9kW
Depend onmodel
× 0B10
PA.17 Rated speed of motor 2 Rated speed 0~24000r/min ○ 0B11
PA.18 Rated current of motor2 Rated current 0.1~999.9A × 0B12
PA.19 No-load current I0 ofmotor 2 No-load current 0.1~999.9A × 0B13
PA.20 Stator resistance R1 ofmotor 2
Statorresistance R1of
0.001~65.000Ω ○ 0B14
PA.21Stator leakageinductance L1 ofmotor 2
Stator leakageinductance L1 0.1~2000.0mH ○ 0B15
PA.22 Rotor resistance R2 ofmotor 2
Rotorresistance R2 0.001~65.000Ω ○ 0B16
PA.23Mutual inductanceresistance Lm of motor2
Mutualinductanceresistance Lm
0.1~2000.0mH ○ 0B17
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
81
Functioncode
Parameter name LCD display Setting range Factorysetting
Modification
MODBUSaddress
PA.24 Saturation coefficient1 of motor 2
Saturationcoefficient 1 0.0%~100.0% ○ 0B18
PA.25 Saturation coefficient2 of motor 2
Saturationcoefficient 2 0.0%~100.0% ○ 0B19
PA.26 Saturation coefficient3 of motor 2
Saturationcoefficient 3 0.0%~100.0% ○ 0B1A
PA.27 Saturation coefficient4 of motor 2
Saturationcoefficient 4 0.0%~100.0% ○ 0B1B
PA.28 Saturation coefficient5 of motor 2
Saturationcoefficient 5 0.0%~100.0% ○ 0B1C
PA.29 Motor parametertuning
Motorparametertuning
0: No operation1: Static parametertuning2: Rotating parametertuning
0 × 0B1D
PA.30 Parameter tuningprocess information
Tuning processinformation - * 0B1E
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
82
Pb: MODBUS communicationFunctioncode
Parameter name LCD display Setting range Factorysetting
Modification
MODBUSaddress
Pb.00 Baud rateselection
Baud rateselection
0: 1200bps 1: 2400bps2: 4800bps 3: 9600 bps4: 19200bps 5: 38400bps
3 × 0C00
Pb.01 Local address Local address 0~31 1 × 0C01
Pb.02 Even-odd checkselection
Check bitselection
0: Even parity1: Odd parity2: No parity
0 × 0C02
Pb.03Communicationtimeoutdetection time
CommunicationtimeoutdetectionTime
0.0~100.0s0: No timeout detectionOther: Timeout detectiontime
0.0s ○ 0C03
Pb.04 Response delaytime Response delay 0~500ms 5ms × 0C04
Pb.05
Communicationtransmissionfrequencycommand unit
Frequencycommand unit
0: 0.01Hz1: 0.1Hz 0 × 0C05
Pb.06Communicationdata Eepromsave options
Communicationdata Eepromsave options
0: Not save Eeprom directly1: Save Eeprom directly 0 × 0C06
Pb.07 CCF6Troubleshooting
CCF6Troubleshooting
0: Resume without reportingfailure1: Reported failure and shutdown automatically
0 × 0C07
Pb.08 Reserve Reserve Reserve 0 - 0C08
PC: display controlFuncti
oncode Parameter name LCD display Setting range
Factory
setting
Modify
MODBUS
address
PC.00 LCD LanguageSelection
LanguageSelection 0: Chinese 1: English 0 ○ 0D00
PC.01
Outputfrequency (Hz)(Beforecompensation)
Outputfrequency (Hz)(Beforecompensation)
0: Not displayed 1: Displayed 1 ○ 0D01
PC.02Outputfrequency (Hz)(Actual)
Outputfrequency (Hz)(Actual)
0: Not displayed 1: Displayed 0 ○ 0D02
PC.03 Output current(A)
Output current(A) 0: Not displayed 1: Displayed 1 ○ 0D03
PC.04 Set frequency(Hz flicker)
Set frequency(Hz flicker) 0: Not displayed 1: Displayed 1 ○ 0D04
PC.05 Operating speed(r/min)
Operating speed(R / min) 0: Not displayed 1: Displayed 1 ○ 0D05
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
83
Function
code Parameter name LCD display Setting range
Factory
setting
Modify
MODBUS
address
PC.06 Set speed(R / min blink)
Set speed(R / min blink) 0: Not displayed 1: Displayed 0 ○ 0D06
PC.07Running linespeed(m/s)
Running linespeed(m/s)
0: Not displayed 1: Displayed 0 ○ 0D07
PC.08 Set line speed(m / s blink)
Set line speed(m / s blink) 0: Not displayed 1: Displayed 0 ○ 0D08
PC.09 Output power(kW)
Output power(kW) 0: Not displayed 1: Displayed 0 ○ 0D09
PC.10 Output torque(%)
Output torque(%) 0: Not displayed 1: Displayed 0 ○ 0D0A
PC.11 Output voltage(V)
Output voltage(V) 0: Not displayed 1: Displayed 1 ○ 0D0B
PC.12 Bus voltage (V) Bus voltage (V) 0: Not displayed 1: Displayed 0 ○ 0D0CPC.13 AI1 (V) AI1 (V) 0: Not displayed 1: Displayed 0 ○ 0D0DPC.14 AI2 (V) AI2 (V) 0: Not displayed 1: Displayed 0 ○ 0D0E
PC.15
3004GB andbelowReserve
Reserve - - *
0D0F35R5GB andabove:AI3 (V)
AI3 (V) 0: Not displayed 1: Displayed 0 ○
PC.16Analog PIDfeedback(%)
Analog PIDfeedback 0: Not displayed 1: Displayed 0 ○ 0D10
PC.17Analog PIDsetting(%, blink)
Analog PIDsetting 0: Not displayed 1: Displayed 0 ○ 0D11
PC.18 External countvalue
External countvalue 0: Not displayed 1: Displayed 0 ○ 0D12
PC.19 Terminal state(No unit) Terminal state 0: Not displayed 1: Displayed 0 ○ 0D13
PC.20 Actual length Actual length 0: Not displayed 1: Displayed 0 ○ 0D14
PC.21Power onindicationselection
Power onindication 1~20 1 ○ 0D15
PC.22 Speed displaycoefficient Speed coefficient
0.1~999.9%Mechanical speed = measuredspeed × PC.22 (PG)Mechanical speed = 120 ×operating frequency ÷ motorpoles × PC.22 (non-PG)Set speed = PID set speed ×PC.22 (PG)Set speed = 120 × setfrequency ÷ motor poles ×PC.22 (non-PG)Notes: Have no effect on actualspeed
100.0% ○ 0D16
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
84
Function
code Parameter name LCD display Setting range
Factory
setting
Modify
MODBUS
address
PC.23 Line speedcoefficient
Line speedcoefficient
0.1~999.9%Line speed = operatingfrequency × PC.23 (non-PG)Line speed = mechanical speed× PC.23 (PG)Set line speed = set frequency× PC.23 (non-PG)Set line speed = set speed ×PC.23 (PG)Notes: Have no effect on actualspeed
100.0% ○ 0D17
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
85
Pd: protection and fault parametersFunction
code Parameter name LCD display Setting range Setup Modification
MODBUS address
Pd.00Motor overloadprotection modeselection
Overloadprotectionselection
0: Failure to actuate1: Common motor (with
low speedcompensation)
2: Variable frequencymotor (without lowspeed compensation)
3: Sensor protection(immediate protectiononce more than thethreshold)
1 × 0E00
Pd.01Protectionthreshold ofmotor 1
Protectionthreshold ofmotor 1
0.0~10.0V 10.0V × 0E01
Pd.02Protection sensorinput channel ofmotor 1
Sensor channelof motor 1
0: Terminal AI11: Terminal AI22: Terminal AI33: Pulse input4: Communication setting
0 × 0E02
Pd.03Protectionthreshold ofmotor 2
Protectionthreshold ofmotor 2
0.0~10.0V 10.0V × 0E03
Pd.04Protection sensorinput channel ofmotor 2
Sensor channelof motor 2
0: Terminal AI11: Terminal AI22: Terminal AI33: Pulse input4: Communication setting
0 × 0E04
Pd.05
Electronicthermal relayElectricalprotection value
Electronicthermal relay 20~110% 100% ○ 0E05
Pd.06Overloadpre-alarmdetection level
Overloadpre-alarmdetection level
20.0~200.0% 160.0% × 0E06
Pd.07Overloadpre-alarmdetection time
Overloadpre-alarmdetection time
0.0~60.0s 60.0s × 0E07
Pd.08 Currentamplitude limit
Currentamplitude limit
0: Invalid1: Valid duringacceleration anddeceleration, and inactiveduring constant speed2: Valid during bothacceleration anddeceleration and constantspeed3: Lower operating speedduring overcurrent
1 ○ 0E08
Pd.09Currentamplitude limitlevel
Currentamplitude limitlevel
80~180% 160% ○ 0E09
Pd.10 Overvoltage stallselection
Overvoltage stallselection
0: Disable (it isrecommended tochoose when
1 × 0E0A
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
86
Functioncode Parameter name LCD display Setting range Setup Modif
icationMODBUS address
installing brakingresistor)
1: Allowed
Pd.11 Overvoltage stallpoint
Overvoltage stallpoint
3004GB and below: 110.0~ 150.0% of the busvoltage35R5GB and above:120.0 ~ 150.0% of thebus voltage
220Vmodels:120%380Vmodels:140%
× 0E0B
Pd.12Input defaultphase detectionreference
Input defaultphase detectionreference (100%corresponds to800V)
1~100% 100% × 0E0C
Pd.13Input defaultphase detectiontime
Input defaultphase detectiontime
2~255s 10s × 0E0D
Pd.14Output defaultphase detectionreference
Output defaultphase detectionreference (100%corresponds torated current ofthe motor)
0~100% 0% × 0E0E
Pd.15Output defaultphase detectiontime
Output defaultphase detectiontime
0.0~2.0s 0.2s × 0E0F
Pd.16Keypad keysUP/DNactivation
Keypad keysUP/DNactivation
0: Invalid1: Activation 0 × 0E10
Pd.17 AE1, AE2, AE3alarm selection
AE1, AE2, AE3alarm selection
0: Do not display warning1: Display warning 0 × 0E11
Pd.18
Number ofautomatic resettimes
Number ofautomatic resettimes
0-10, 0 indicates noautomatic resetOnly three failures haveautomatic reset function
0 × 0E12
Pd.19 Reset intervaltime
Reset intervaltime 2.0~20.0s 5.0s × 0E13
Pd.20
Confirm the timebeforedeceleration dueto overcurrent
Confirm the timebeforedeceleration dueto overcurrent
0~200ms 50ms × 0E14
Pd.21Run protectionwhile poweringon
Run protectionwhile poweringon
0: Not protect1: Protect 0 ○ 0E15
Pd.22
Run protectionafter switchingthe runcommand setmode
Command toswitch runprotection
0: Continue to run1: stop, received a new
run commandRe-run after thecommand
0 × 0E16
Pd.23Action selectionin case of stall(reserve)
Anti-stall actionselection
0: Do not executeanti-stall action sequence1: Execute anti-stallaction sequence
0 × 0E17
Pd.24 Stall actiontoggle condition
Stall actiontoggle condition
0: The output currentexceeds the togglelevel
2 × 0E18
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
87
Functioncode Parameter name LCD display Setting range Setup Modif
icationMODBUS address
1: The control terminal isclosed
2: Output current exceedsthe set point or controlterminal is closed
3: Timing cycle execution
Pd.25 Stall actiontoggle level
Stall actiontoggle level 100.0~300.0% 200.0% ○ 0E19
Pd.26 Stall actiontoggle period
Stall actiontoggle period 0.00h~200.0h 0.00h ○ 0E1A
Pd.27 Forward stepfrequency
Forward stepfrequency
0.00Hz~upper limitfrequency 0.00Hz ○ 0E1B
Pd.28 Forward stepduration
Forward stepduration 0.0s~1000s 0.0s ○ 0E1C
Pd.29 Reverse stepfrequency
Reverse stepfrequency
0.00Hz~upper limitfrequency 0.00Hz ○ 0E1D
Pd.30 Reverse stepduration
Reverse stepduration 0.0s~1000s 0.0s ○ 0E1E
Pd.31Forward andreverse stepinterval
Forward andreverse stepinterval
0.0s~1000s 0.0s ○ 0E1F
Pd.32Number ofrepetitions ofstep action
Number ofrepetitions ofstep action
0~100 0 ○ 0E20
Pd.33 Software currentlimit point
Software currentlimit point 0.0%~250.0% Depend on
models ○ 0E21
Pd.34 Enable hardwarecurrent limit
Enable hardwarecurrent limit 0: Disable; 1: Enable 1 ○ 0E22
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
88
PE: Run history recordFunction
codeParameter
name LCD display Setting range Factorysetting
Modification
MODBUS address
PE.00 Type oflatest fault
Types oflatest faults
0: NULL1: Uu1 bus undervoltage2: Uu2 control circuit
undervoltage3: Uu3 poor charging circuit4: OC1 acceleration overcurrent5: OC2 deceleration overcurrent6: OC3 constant speed
overcurrent7: Ou1 acceleration overvoltage8: Ou2 deceleration overvoltage9: Ou3 constant speed
overvoltage10: GF Ground11: OH1 radiator overheat12: OL1 motor overload13: OL2 inverter overload14: SC load short circuit15: EF0 external fault from an
serial communication16: EF1 external fault on terminals17: SP1 input phase loss or
unbalance18: SPO output phase loss or
unbalance19: CCF1 control loop fault 1. The
transmission between theinverter and the keypad stillcannot be established 5s afterpowering on
20: CCF2 control loop fault 2.After connecting the inverterand the keypad, thetransmission failure last formore than 2 seconds
21: CCF3 EEPROM failure22: CCF4 AD translation
exception23: CCF5 RAM failure24: CCF6 CPU is disturbed25: PCE Parameter name
replication error26: Reserve27: HE Hall current detection fault28: De Cut-to-length detection
fault29: Cue Feed off fault
NULL * 0F00
PE.01
Outputfrequencywhen thelatest faultoccurs
Outputfrequencywhen a faultoccurs
0~upper limit frequency 0.00Hz * 0F01
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
89
Functioncode
Parametername LCD display Setting range Factory
settingModification
MODBUS address
PE.02
Setfrequencywhen thelatest faultoccurs
Setfrequencywhen a faultoccurs
0~upper limit frequency 0.00Hz * 0F02
PE.03
Outputcurrentwhen thelatest faultoccurs
Outputcurrentwhen a faultoccurs
0 ~ 2 times of the rated current 0.0A * 0F03
PE.04
DC busbarvoltagewhen thelatest faultoccurs
Bus voltagewhen a faultoccurs
0~1000V 0V * 0F04
PE.05
Serviceconditionwhen thelatest faultoccurs
Serviceconditionwhen a faultoccurs
0: StP Stop 1: Acc Acceleration 2:dEc deceleration3: con Constant speed
StP * 0F05
PE.06 Fault history(the latest)
Faulthistory 1 The same with PE.00 NULL * 0F06
PE.07 Fault history2
Faulthistory 2 The same with PE.00 NULL * 0F07
PE.08 Fault history3
Faulthistory 3 The same with PE.00 NULL * 0F08
PE.09Accumulated runningtime
Runningtime 0~65530h 0h * 0F09
PE.10Cumulativepower-ontime
Power-ontime 0~65530h 0h * 0F0A
PE.11
Totalelectricityconsumption(MWh)
Cumulativeelectricityconsumption (MWh)
0~9999MWh 0MWh * 0F0B
PE.12
Totalelectricityconsumption(KWh)
Cumulativeelectricityconsumption (KWh)
0~999KWh 0KWh * 0F0C
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 4 Parameter Index
90
PF: Parameter protection and product identification informationFunction
code Parameter name LCD display Setting range Factorysetting Modify
MODBUSaddress
PF.00 User password User password 0: No passwordOther: Password protection 0 ○ 1000
PF.01Parameterwriteprotection
Parameterprotectionselection
0: All parameters are allowed to berewritten
1: Except for setting frequency(P0.02), and the function code,the other function codes areprohibited to be rewritten
2: Except for this function code, allothers are prohibited to berewritten
0 ○ 1001
PF.02 ParameterInitialization
ParameterInitialization
0: No operation1: Clear the fault history2: Restore factory setting
(Except record \ password \motor parameters)
3: Restore factory setting(Except record \ password)
0 × 1002
PF.03 Parameter copy Parameter copy
0: No action1: Parameter download2: Parameter upload3: Without download of motorparametersNote: Only active for LCD keypad
0 × 1003
PF.04 Reserve Reserve - 0 × 1004PF.05 Product No. 1 Product No. 1 0~9999 * 1005PF.06 Product No. 2 Product No. 2 0~9999 * 1006PF.07 Product No. 3 Product No. 3 0~9999 * 1007PF.08 Product No. 4 Product No. 4 0~9999 * 1008
PF.09 Product serialnumber
Product serialnumber 0~9999 * 1009
PF.10 Softwareversion number
Softwareversion number 0.00~99.99 * 100A
PF.11Non-standardversion andserial number
Non-standardversion andserial number
0.000~9.999 * 100B
PF.12Softwareidentificationcode
Softwareidentificationcode
0~9999 * 100C
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
91
Chapter 5 Detailed Function Introductions
5.1 Basic Function (Group P0)
P0.00 Menu display mode Setting range: 0~1 [0]
0: Standard menu 1: Check mode menuNotes: Pressing “FWD/REV” will switch the direction, and change the value of this parameter P0.08. But the
changed direction only takes effect currently. Only by changing value of function code and pressing “ENTER” to save the value, keypad direction
setting will be saved permanently.Direction priority: Terminal set is the highest, second is set by communication, keypad is the lowest. If the high oneis invalid, the lower priority will take effect. When P0.00 is set to 1, enter the menu check mode. In this mode, youcan view and modify each modified function code by the knob adjustment. The remaining unmodified function codewill be shielded.
P0.01 Control mode Setting range: 0~3 [2]
0: V/F control 1: Close loop vector control2: Open loop vector control 3: V/F separation control
Notes: V / F control: When using one inverter to drive more than one motor, please select the control mode when
self-tuning of parameters of motors cannot be performed correctly or the parameters of motors cannot beobtained correctly through other means.
Closed-loop vector control: It is speed sensor closed-loop vector control mode, mainly used in places havestrict requirements for control performance, such as places required to realize high accuracy speed control,torque control, etc. When selecting the control mode, it is necessary to install pulse coder and other speedsensors, and relevant parameters of the encoder should be correctly set. The control mode is exclusive forALPHA6000V series inverters.
Open loop vector control: It is sensorless vector control mode, can be used in ordinary high-performancevariable speed drive places.
V/F separation control: The control mode can be used in some places where are required to control thefrequency and the voltage independently.
Tips:When selecting open loop or closed loop vector control mode control mode, if the motor is not default ordinaryquadrupole asynchronous motor, it is required to correctly set the nameplate parameters of the motor first, and carryout self-tuning of parameter of motor to obtain accurate parameters of motor. To obtain the best control performance,it is suggested to carry out nameplate parameter setting and self-tuning of motor parameters before the initialrunning; and to set the relevant parameters of vector control correctly, please see description of Group P8 vectorcontrol parameters for details.Note that in this control mode, usually, one inverter motor can only control one motor, and the power class of theinverter should not be too different from that of the motor, power class of the motor can be one class bigger orsmaller than that of the inverter, otherwise it will result in poor control performance or improper running.
P0.02 Reference frequency Setting range: 0 ~Maximum frequency [0.00Hz]
Notes: When the function code P0.03 or P0.04 = 1, the function is enabled when setting frequency digital setting
with a keypad. It defined the frequency set point of the inverter.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
92
Tips:The changed value of P0.02 by keypad digital encoder will be active immediately. If press "ENTER" key, the valuewill be stored into the inverter’s internal EEPROM and will not be lost even power-off the inverter.When P0.03is set to 1: if P3.18 is set to2, the changed value of P0.02 by keypad digital encoder will be saved whenpower loss. Otherwise, the changed value will not be saved
P0.03 Frequency setting source 1 Setting range: 0~12 [1]
0: NULL 1: keypad digital setting, digital knob adjustment
2: Terminal AI1 3: Terminal AI2
4: Terminal AI3 (reserve for 3004GB andbelow models) 5: Pulse input
6: Serial communication 7: Line speed(reserve)
8: Multi-step Speed 9: Terminal UP/DOWN
10: Programmable Logic Controller (PLC) 11: PID close-loop
12: Wobble frequency operating
P0.04 Frequency setting source 2 Setting range:: 0~9 [0]
0: NULL 1: keypad digital setting, digital knob adjustment
2: Terminal AI1 3: Terminal AI2
4: Terminal AI3 (reserve for 3004GB andbelow models) 5: Pulse input
6: Serial communication 7: Line speed(reserve)
8: Multi-step Speed 9: torque slip compensation dosage
Notes: If P0.03 is set to 1: During keypad digital setting, in monitoring state, the set frequency can be modified
through digital knob on the keypad; when the set frequency is related to P0.02, in monitoring state, value ofP0.02 can be adjusted through the keypad knob.
Terminal AI1, AI2 and AI3 are analog input signals. When using terminal AI1, AI2, the output frequency canbe adjusted through 0~10V voltage signal or 0~20mA current signal; when using terminal AI3, the outputfrequency can be adjusted through - 10V~ 10V voltage signal or - 20mA~20mA current signal; negativevalue represents reversing operation.
Signal type is selected through the relevant toggle switch on the control circuit board, and please refer toSection 2.5 Wiring Instruction for Control Loop.
Corresponding relationship between sizes and frequencies of terminal AI1, AI2, AI3, and pulse input signal isprogrammable; please see detailed descriptions of Group P4 parameters.
Serial communication setting, the user can connect the serial communication port to a PC or PLC. The setfrequency of the inverter is controlled by the communication mode.
When P0.03 is set to 9, see description of Group P3 UP / DOWN. When P0.04 is set to 9, compensation is half of the corresponding slip frequency difference of the set torque
and the actual torque.
P0.05 Frequency setting combination 1 Setting range: 0~9 [0]
P0.06 Frequency setting combination 2 Setting range: 0~9 [0]
0: Frequency setting source 1 1: Frequency setting source 2
2: MIN(Frequency setting source 1, Frequency 3: MAX(Frequency setting source 1, Frequency setting
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
93
setting source 2) source 2)
4: Frequency setting source 1+Frequency settingsource 2
5: Frequency setting source 1-Frequency setting source 2
6: Frequency setting source 1 x Frequency settingsource 2 7: Frequency setting source 1÷Frequency setting source 2
8: |Frequency setting source 1-Frequency settingsource 2
9: Frequency setting source2 × (Maximum outputfrequency+frequency setting source1)
÷Maximum output frequencyNotes: Frequency setting source 1: It represent the frequency set based on P0.03 frequency setting source 1. Frequency setting source 2: It represent the frequency set based on P 0.04 frequency setting source 2 The frequencies set based on frequency setting source 1 and the frequency setting source 2 is used as the final
set frequency after appropriate combination operation. If "FC" function terminal is defined (see P3.01-P3.11), and the terminal function is enabled, then the result of
frequency setting combination 2 of P0.06 is actual set frequency; if the "FC" function terminal is not defined,or it is defined, but the terminal function is disabled, then result of frequency setting combination 1 of P0.05is the actual set frequency. Users can switch at will between the two different frequency setting combinations.If the combination mode is 6,7, then the value set by frequency setting source 2 no longer representsfrequency, instead it will be used as the coefficient, and the absolute value is the final result we want.
P0.07 Run command mode selection Setting range: 0~5 [0]
0: Keypad control 1: Terminal control 1 (STOP invalid)
2: Terminal control 2 (STOP valid) 3: Serial communication 1 (STOP invalid)
4: Serial communication 2 (STOP valid) 5: Terminal control 3 (STOP and JOG invalid)Note 1: In keypad control mode, the user controls start and stop of the inverter directly through RUN, STOP keys on
the keypad. In terminal control mode, the user needs to define multi-function input terminal first to realize the operation
functions of RUN, F/R, FWD, REV, HLD, etc. (see P3.01~ P3.11), and then the terminal controls the startand stop of the inverter.
In serial communication control mode, the user connects the serial communication port to a PC or PLC. Thestart, stop, positive and negative rotation of the inverter is controlled by the communication mode.
When STOP key is enabled, the user can stop the inverter with the STOP key on the keypad, which is used inoccasions of site emergency stop. When STOP key is disabled, the user can only stop the inverter through theset control mode.
When P0.07 is set to 5, JOG and STOP keys on the keypad are disabled; when JOG key is disabled, the JOGkey on the keypad fails, the user can only enable inching running through terminal.
In keypad and terminal control modes, the communication read/write parameter operations are ignored.
P0.08 Keypad direction setting Setting range: 0.1 [0]
0: Forward 1: ReverseNotes: Pressing “FWD/REV” will switch the direction, and change the value of this parameter P0.08. But the
changed direction only takes effect currently. Only by changing value of function code and pressing “ENTER” to save the value, keypad direction
setting will be saved permanently.Direction priority: Terminal set is the highest, second is set by communication, keypad is the lowest. If thehigh one is invalid, the lower priority will take effect.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
94
P0.09 fundamental frequency Setting range: 3004GB and below: 0.10 ~ 650.0Hz 35R5GB and above:0.10~400.0Hz
P0.10 maximum outputfrequency
Setting range: 3004GB and below: MAX [50.00Hz, upper limit frequency, setfrequency, multi-stage frequency, hopping frequency] ~ 650.0Hz [50.00Hz]35R5GB and above: MAX [50.00Hz, upper limit frequency, set frequency,multi-stage frequency, hopping frequency] ~ 400.0Hz [50.00Hz]
Notes: Fundamental frequency FBASE: When the output voltage of the inverter is equal to the minimum output
frequency of the rated voltage UN, it is used as the benchmark of the regulating frequency. Usually, the ratedfrequency of the motor is used as the set point of the fundamental frequency. The adjustable range offundamental frequency FBASE of this series of inverters is 0.10 ~ 650.0Hz. In the usual case of the use,FBASE is selected according to the rated frequency of the motor. In particular occasions of use, it can be setaccording to the operating requirement, but it should be noted the fitting with V / F characteristic of the loadmotor and the output requirements of the motor, which is shown in Fig. 5-0-1 Relationship between outputfrequency and output voltage.
输出电压V
额定电压
输出频率(Hz)
基本频率 最大输出频率
Fig. 5-0-1 Relationship between output frequency and output voltage
Maximum frequency FMAX is the maximum frequency of this series of inverter allowed to output. If the setpoint is greater than the rated value of the drive unit, it may result in damage to motor and mechanicalequipment.
P 0.11 upper limit frequencysource Setting range: 0 ~ 5 [ 0]
0: Digital setting 1: Terminal AI12: Terminal AI2 3: Terminal AI3 (reserve for 3004GB and below models)4: Pulse input 5: Communication setting
Notes: In non-zero setting, adjustable range of the upper limit frequency is the set point of 0 ~ P0.12 upper limit
frequency.
P0.12 upper limit frequency Setting range: MAX (lower limit frequency, jog frequency, UP/DN givenamplitude, sleep threshold) ~ maximum frequency [50.00Hz]
P0.13 Offset of upper limitfrequency Setting range: 0.00 ~ upper limit frequency [0.00Hz]
P0.14 Rated voltage of motor Setting range: 60 ~ 480V [Rated voltage]
P0.15 lower limit frequency Setting range: 0.00 ~ upper limit frequency [0.00Hz]
P0.16 Maximum output voltage Setting range: 60 ~ 480V [Rated voltage]Notes: Upper limit frequency is the highest frequency allowing forwarding rotation and reverse rotation of the
inverter, lower limit frequency is the minimum frequency allowing rotation of the inverter. Set the upper limitfrequency and lower limit frequency, and automatically ensure that the output frequency is not higher than the
Fundamentalfrequency
Rated voltage
Output frequency (Hz)
Output voltage V
Maximum outputfrequency
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
95
upper limit frequency, and not less than the lower limit frequency. This function is commonly used to ensurethat the motor operates at the allowable frequency in order to avoid misoperation or accidents of mechanicalsystem or inverter caused by unintended causes. It is particularly applicable to occasions preventinglow-speed or overspeed running (see P2.04).
Upper limit frequency offset: When the upper limit frequency source is an analog set point, the parameter isused as the analog offset. Its benchmark is P0.12. Bias frequency is applied to the analog frequency set pointas the set point of the final upper limit frequency. When the upper limit frequency source is the digital setpoint, offset plus upper limit set frequency is the set point of the final upper limit frequency.
The maximum output voltage is the corresponding voltage when the inverter outputs fundamental frequency,it is usually the rated input voltage specified on the motor nameplate.
P0.17 Step length of digitalencoder regulation Setting range:0~250×(0.01Hz/1rpm) [50]
Notes:This parameter is only active for the online adjustment of the set frequency and the set speed in monitoring state; When the function code is set to 0, and the keypad knob is integral regulation mode, which means rotating the
knob continuously and keeping the rotation speed can increase the adjustment step width gradually from 1 to10, from 10 to 100, and up to 100 (maximum);
When the function code is not set to 0, it is the Cut-to-length regulation mode. The set value is thecorresponding variation of the set frequency/speed when rotating the knob for one position, which means theadjustment amount of set frequency / speed when rotating the knob for one position is (P0.17 × 30) ×(0.01Hz/1rpm).
When the adjustment object is the set frequency, the unit of P0.17 is 0.01Hz; when the adjustment object isthe set speed, in general operating mode, the unit of P0.17 is (6 ÷ (5 × motor poles)) rpm, in digital PIDmode, the unit of P0.17 is 1rpm;
Example:In general operating mode, in the adjustable range of the frequency, when P0.17 = 100, when rotating the knob onthe keypad for one circle, the set frequency increases or decreases 30.00Hz, the speed increases or decreases 900rpm;when P0.17 = 10, then the set frequency and the speed increase or decrease 3.00Hz and 90rpm respectively. Indigital PID operation mode, when P0.17 = 10, the speed increases or decreases 300rpm while rotating the knob onthe keypad for a circle;
P0.18 Acc time1 Setting range: 0.1~3600s [6.0s/20.0s]
P0.19 Dec time1 Setting range: 0.1~3600s [6.0s/20.0s]Notes: Acceleration time: The time that the inverter speed rises from null speed up to the maximum frequency.
Deceleration time: The time that the inverter speed decelerates from the maximum frequency to null speed. This series of inverter defines four groups acceleration and deceleration time (the others see P2.28 ~ P2.33),
user can select different acceleration and deceleration time through external terminals according to the needs,or can select different acceleration and deceleration time during the program timing run.
the default units of acceleration and deceleration time is s, the acceleration and deceleration time can bereduced or enlarged to 10 times by modifying P2.35 acceleration and deceleration time multiplying factor.
5.2 Start/Stop Control (Group P1)
P1.00 Start mode Setting range:: 0~2 [0]
0: Start directly: 1: Brake first and then start
2: Rotating speed tracking
Notes: Start directly: Speeds up from zero-speed and accelerate to the preset frequency within the preset Acc time.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
96
Brake first and then start: Inverter adds some DC braking power to load first, and then startup. As shown inFigure. 5-1-1. Starting mode 1 is suitable for small inertia load which is running forward or reverse while theinverter is in stop state, such as fan load. DC braking parameters refer to P1.03 and P1.04.
When the control mode is "closed-loop vector control", even if the startup mode is "starting at the startingfrequency", the speed tracking start-up is also performed. The difference from "speed tracking" startup modelies in that when "P1.02 starting frequency hold time" is not 0, and the corresponding running frequency ofthe current speed is greater than the starting frequency, decrease the speed to the corresponding speed ofstarting frequency, and keep the inverter run at the set frequency after maintaining "starting frequency holdtime".
Brake First and then startOutput Freq.(Hz)
DC injec tion br aking time
Brakingenergy
Time
Time
Braking voltage
Running command
St op command
Figure. 5-1-1 Brake First and then start
Rotating speed tracking restart: Search and catch the motor’s running direction and speed, and then start at
the caught speed , running to the reference frequency within the Acc/Dec time, realize smooth start of motor,as shown in Figure. 5-1-2. This mode is suitable for the motor with big inertial load.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
97
Poweroff
Operation Freq.
Motor speed
Detect motor's speed and direction
Output voltage
Time
Time
Time
Figure. 5-1-2 Rotating speed tracking restart
Starting process includes the start of inverter power on, power recover, external fault reset, and restart aftercoast-to-stop.
Tips:
Speed tracking function only with encoder (PG) or with speed tracking card.
P1.01 Start frequency Setting range: 0.10~60.00Hz [0.50Hz]
P1.02 Start frequency holding time Setting range: 0.0~10.0s [0.0s]
Notes:Start frequency is the initial frequency at which the inverter starts, see fS as shown in Figure. 5-1-3 ; Holding time ofstarting frequency is the time during which the inverter operates at the starting frequency, see t1 as shown in Figure.5-1-3:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
98
Figure. 5-1-3 Starting frequency and starting time
Tips:
1. Starting frequency is not restricted by the frequency lower limit.2. If reference frequency is lower than starting frequency during acceleration, the inverter will run at zero-speed
P1.03 DC braking current at start This value depends on the inverter model [0.0%]
P1.04 DC braking time at start Setting range: 0.0~30.0s [0.1s]Notes: P1.03 and P1.04 are only active when P1.00 is set to 1 (start mode 1 is selected), as shown in Figure. 5-1-1. In V/F mode, 100.0% corresponds to the rated current of the motor; in vector mode, the starting DC braking
current is determined by P8.00 pre-excitation current compensation coefficient (100.0% corresponds tono-load current of the motor).
The set upper limit of the starting DC braking current is 80% of the rated current of the inverter or the smallerrated current of the motor.
When the starting DC braking time is 0.0s, there is no DC braking process.
Tips:
Tips Before using DC braking function, the rated parameters of the motor must be correctly set.
P1.05 start preset frequency Setting range: 0.00 ~ maximum frequency [0.00Hz]
P1.06 preset frequency hold time Setting range: 0.0 ~ 3600.0s [0.0s]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
99
t2t1
设定频率
启动频率保持时间 启动预置频率保持时间
Figure 5-1-4 Start frequency and Start preset frequency schematic diagram
Tips:
When starting preset frequency is less than the starting frequency or starting preset holding frequency time is 0,the starting preset frequency is invalid.
P1.07 Acc/Dec mode Setting range: 0~3 [0]
0: Linearity 1: S-curve
2: Reserved 3: Reserved
Notes: Linear Acc/Dec mode used for ordinary load: The output frequency increases or decreases according to a
constant rate. As shown in Figure. 5-1-5.
Figure. 5-1-5 Linear acceleration/deceleration
S-curve change output frequency slowly at start of acceleration or end of deceleration, in order to reducemechanism noise and shake, lash of start and stop. It is suitable for the load that needs descending torque atlow frequency, and short-time acceleration at high frequency, such as conveying belt.
Setfrequency
Starting frequencyhold time
Starting preset frequencyhold time
Output frequency (HZ)
Maximum frequency
Set frequency
Time
Set acceleration time Set deceleration time
Actual acceleration time Actual deceleration time
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
100
Running Freq.(Hz)
Time
Acc Time Dec Time
③
②
①①
③
②
Figure.5-1-6 S-curve acceleration/deceleration
P1.08 Time of S-curve initial Setting range: 10.0~50.0% [20.0%]
P1.09 Time of S-curve rising Setting range: 10.0~80.0% [60.0%]
Notes: P1.08 and P1.09 are only active when the Acc/Dec mode is S-curve mode (P1.07=1) and P1.08+P1.09≤90%.
Starting process of S-curve is shown in Figure. 5-1-6 as “①”, where the changing rate of output frequencyincreases from 0.
Rising process of S-curve is shown in Figure. 5-1-6 as “②”, where the changing rate of output frequency isconstant.
Ending process of S-curve is shown in Figure. 5-1-6 as “③”, where the changing rate of output frequencydecreases to zero.
Tips:
S-curve Acc/Dec mode is suitable for the conveying load such as elevator and conveying belt.
P1.10 Stop mode Setting range: 0~2 [0]
0: Deceleration to stop 1: Coast to stop
2: Deceleration +DC braking
Notes: 0: Dec-to-stop
After receiving the stop command, the inverter reduces its output frequency within the Dec time, and stopswhen the frequency decreases to zero.
1: Coast-to-stopAfter receiving the stop command, the inverter stops output immediately and the load stops under the effectsof mechanical inertia.
2: Dec-to-stop +DC brakingAfter receiving the stop command, the inverter reduces its output frequency according to the Dec time andstarts DC braking when its output frequency reaches the preset frequency of braking. Refer to the Notes ofP1.11~P1.15 for the functions of DC braking.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
101
P1.11 DC braking frequency at stopSetting range: 0~MIN (50.00, Frequency upper limit)[2.00Hz]
P1.12 DC braking waiting time at stop Setting range: 0.00~10.00s [0.00s]
P1.13 StoppingDC braking current setting source Setting range: 0~5 [0]
0: Digital setting 1: Terminal AI1
2: Terminal AI2 3: Terminal AI3 (reserve for 3004GB and below models)
4: Pulse input 5: Communication setting
P1.14 stoppingDC braking current Setting range: depending on the model [0.0%]
P1.15 stoppingDC braking time Setting range: 0.0 ~ 30.0s [0.0s]
Notes: DC braking is injecting DC current to motor, to let it stop quickly, and keep the spindle of motor in
standstill until finished DC braking If there is pre-shoot or slewing during deceleration stopping or positive and negative dead zone, the value of
P1.11 can be decreased or increased appropriately.
Figure. 5-1-7 DC braking
DC braking frequency at stop is the frequency at which DC braking action begins when the inverter inDec-to-stop process. In the process of constant rate deceleration, if the output frequency is at or below the“DC braking frequency at stop, the DC braking function will startup.
The upper limit of the stopping DC braking current is 80% of the rated current of the inverter or the smallerrated current of the motor.
When the stopping DC braking time is 0.0s, there is no DC braking process. Stopping DC brake time: It is DC braking current hold time. This time cannot be set too long, as this may
cause overheat of the inverter. If the DC braking time is equal to zero, then DC braking does not operate.
Tips:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
102
This function will start up after inverter received stop command. Usually, it is used to improve the stopprecision and not for deceleration braking in common running. If faster stop required, braking energyregeneration unit should be fitted, or the inverter that has the function of brake energy regeneration should beselected.
P1.16 Stopping holding frequency Setting range: 0~Maximum frequency [0.00Hz]
P1.17 Stopping holding time Setting range:0~3600.0s [0.0s]
Notes: The stopping holding frequency: under the conditions of press the STOP key or other normal stopping, the
operation frequency will drop to stopping holding frequency, then drop to 0. When stopping holding time is 0, stopping holding frequency is invalid; when current setting holding
frequency is greater than the operation frequency, stopping holding frequency is invalid.
P1.18 Dynamic braking selection Setting range: 0,3 [3]
0: Dynamic braking is disabled 1: Dynamic braking is enabled
2: Use flux brake 3: Use energy consumption and flux brake
Tips:
On occasions where the load inertia is not great and there is no special requirements on the deceleration time,magnetic flux braking can be used only without connecting braking resistor; while on occasions where therotary inertia is great, and fast stopping is required, it is suggested to set the parameter to 1 or 3 and select thematching dynamic braking unit and braking resistor.15kW and below models is designed with built-in braking unit.
P1.19 Dynamic braking usage Setting range: 30.0% to 100.0% [100.0%]
Notes: The larger the set value is, the better the braking effect will be got, but the temperature rise of the braking
resistor will be greater. Therefore, setting of this parameter should consider the impedance and power of thebraking resistor, choose the appropriate usage to achieve a balance between rapid braking and avoidingbraking resistor overheat.
Dynamic braking operation voltage point relates to stall overvoltage point (Pd.11). For 380V input models,dynamic braking operation voltage point is about 52V lower than stall overvoltage point (namely the defaultoperation point is 700V); for 220V input models, dynamic braking operation voltage point is about 23V lowerthan stall overvoltage point (namely the default operation point is 350V). Please see Pd.11 description formore details.
P1.20 Trip-free handling Setting range: 0 ~ 2 [ 0]
0: It will be fault Uu1 after Trip-free 1: Give an alarm Uu within instantaneous stop time, and givefault Uu1 afterwards;
2: It will give an alarm Uu after Trip-free
P1.21 Trip-free time Setting range: 0.5-10.0s [This value depends on the invertermodel]
P1.22 Action selection after transient stop Setting range: 0.1 [0]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
103
alarm
0: Failure to actuate 1: Slowdown running
P1.23 Rate of deceleration duringinstantaneous stop deceleration running Setting range: 0.00 ~ - maximum frequency [10.00Hz /s]
Notes: If undervoltage occurs at the time of stopping, it only give an alarm of Uu, at this time, the motor cannot be
started. As shown in Fig. 5-1-8: If undervoltage occurs during running, it will give an alarm of Uu or Uu1 as shown in Fig. 5-1-8; when Uu
occurs, the pulse will be locked and the inverter will run at 0Hz frequency. Uu will disappear after therecovery; when Uu1 occurs, the inverter will shut down, if the voltage continues to drop to 300V or less, itwill not be regarded as a fault record or a fault output; it will record fault Uu1 after the recovery.
When the action is selected as 1 after the instantaneous stop alarm, the inverter should run slowly at theinstantaneous stop deceleration speed, if the mains supply recovers during the deceleration, the frequencyshould be recovered to the set frequency according to the set acceleration time.
Power 1 ON
OFF
ON
Trip-free time
Treatment 0 RUN
Treatment 1 RUN
Treatment 2 RUN
Uu1 Uu1 Uu1 ... Recorded
Uu
Zero-speed Uu1 Uu1 ... Recorded
Uu Uu Not record
Zero-speed Zero-speed
Power 2 ON
OFF
Trip time
Treatment 0 RUN
Treatment 1 RUN
Treatment 2 RUN
Uu1 Uu1 Uu1 ... Not recorded
Uu
Zero-speed Uu1 Uu1 ... Not recorded
Uu Uu Not recorded
Zero-speed Zero-speed
Figure. 5-1-8 Trip-free diagram
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
104
5.3 Auxiliary Operation (Group P2)
P2.00 Jog Frequency Setting range: 0.10~Frequency upper limit [5.00Hz]
P2.01 Acc time of Jog Setting range: 0.1~3600s [6.0/20.0s]
P2.02 Dec time of Jog Setting range: 0.0~3600s [6.0/20.0s]
Notes: P2.00~P2.02 define the related parameters of Jog. As shown in Figure. 5-2-1, t1 is Acc time of Jog and t3 is Dec time of Jog t2 is the Jog time; P2.00 is the Jog
frequency. Actual Acc time of JOG (t1) can be determined by the following formula. So does the actual Dec time of JOG
(t3). JOG stop mode depends the value of P2.02: If P2.02 setting is not 0, the motor will stop as stop mode 0; if
P2.02 setting is 0, the motor will coast to stop
Operation Freq.(Hz)
P2.00
JOG Command
Time
t2t1 t3
t1=P2.00×P2.01
P0.07
Fig. 5-2-1 Description of Jog parameters
Tips:
1. In Jog operation, the inverter starts according to starting mode 0. The unit of Acc/Dec time is second.2. If deceleration time of Jog is 0: coast-to-stop, but DC braking terminal takes effect when stop Jog
operation, the deceleration time will be P2.23 Dec time 4.3. Jog operation can be controlled by keypad, terminals or serial port.
P2.03 Switching time between run forwardand reverse Setting range: 0.0~3600s [0.0s]
Notes: The delay time is the transition time at zero frequency when the inverter switching its running direction as
shown in Figure. 5-2-2 as t1.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
105
Operation Freq.(Hz)
Timet1
Figure. 5-2-2 FWD/REV switching time
P2.04 Frequency lower limit deal mode Setting range: 0~3 [0]
0: Run at Frequency lower limit 1: Run at zero-speed.
2: Stopping 3: Zero speed operation
Notes: If setting is 0, when the reference frequency is lower than frequency lower limit, the inverter will run at
frequency lower limit instead of reference frequency. As shown in Figure. 5-2-3.
Operation Freq.(Hz)
Lower limit Frequency
TimeReference
Frequency 2
Reference Frequency 1
Figure. 5-2-3 Running at Frequency lower limit
Option 1: When the inverter runs at 0 frequency, if the set frequency is less than the lower limit frequency, theinverter should run at the lower limit frequency, and run at 0 frequency after the delay time arrives at P3.30,as shown in Fig. 5-2-4.
Operation Freq.(Hz)
Frequency lower limit
TimeReference
Freq. 2
Reference Freq. 1
Frequency lower limit arrivied delay time(P3.22)
Figure. 5-2-4 Zero-speed running
Sleep function is enabled and the inverter is in sleep running, then no matter P2.04 is 0 or 1, the invertershould be regarded as running at 0 frequency.
Option 3: Reserve
Frequency lower limit arrived delay time (P3.30)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
106
P2.05 Frequency departure setting Setting range: 0.00~2.50Hz [0.10Hz]
Notes: Prevent analog setting fluctuation leading joggling of output frequency. When the frequency setting source is
terminal AI or pulse input, it takes effect only when the set frequency changes and the variation range exceedsthe set range.
P2.06 carrier frequency adjustmentselection Setting range:0.1 [0]
0: No automatic adjustment 1: Adjust automatically according to the load and the temperature ofthe inverter
Notes: The carrier frequency is the upper limit of the carrier frequency in vector control mode or when there is no
automatic adjustment. Option 1: This function option can adjust the carrier frequency by automatically synthesizing the load and
temperature of the inverter so as to regulate the width of the frequency domain of the noise of the motor orreduce the probability of the inverter issuing overheat alarm.
P2.07 Carrier frequency upper limit Setting range: depending on model
P2.08 Carrier frequency lower limit Setting range: 1.0~P2.07 [1.0KHz]Notes: In order to obtain better control characteristics, it is suggested that the ratio of the carrier frequency and the
maximum operating frequency of the inverter is not less than 36. To reduce the noise, higher carrier frequency can be selected; if the inverter is not required to be absolutely
quiet during running, lower carrier frequency can be used to reduce loss of the inverter and intensity ofradio-frequency radiation.
If the used carrier frequency is greater than the factory set value, then the rated continuous-service current ofthe inverter will be reduced.
P2.09 Jump frequency 1 Setting range: 0.00~Max frequency [0.00Hz]
P2.10 Jump frequency 2 Setting range: 0.00~Max frequency [0.00Hz]
P2.11 Jump frequency 3 Setting range: 0.00~Max frequency [0.00Hz]
P2.12 Jump frequency bandwidth Setting range: 0~15.00Hz [0.00Hz]
Notes: In order to make the set frequency of the inverter avoid the resonance frequency point of the mechanical load,
the set frequency of the inverter can hop near some frequency point. The operating frequency correspondingto the resonance frequency is hopping frequency as shown in Fig. 5-2-5.
Frequency set t ing signal
Reference Freq.(Hz)
Jumpfrequency 1
Jumpfrequency 2
Jumpfrequency 3
Jumpfrequency
bandwidth
Jump frequencybandwidth
Jump frequency bandwidth
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
107
Figure. 5-2-5 Jump Frequency
The inverter can set three jump frequency points, and the jump frequency bandwidth can overlap or nesting.If overlapped, the range broadens. When all three jump frequency set to 0.00 Hz, the jump function will bedisabled.
P2.13 Multi-step frequency 1 Setting range: 0.00~Max frequency [5.00Hz]
P2.14 Multi-step frequency 2 Setting range: 0.00~Max frequency [8.00Hz]
P2.15 Multi-step frequency 3 Setting range: 0.00~Max frequency [10.00Hz]
P2.16 Multi-step frequency 4 Setting range: 0.00~Max frequency [15.00Hz]
P2.17 Multi-step frequency 5 Setting range: 0.00~Max frequency [18.00Hz]
P2.18 Multi-step frequency 6 Setting range: 0.00~Max frequency [20.00Hz]
P2.19 Multi-step frequency 7 Setting range: 0.00~Max frequency [25.00Hz]
P2.20 Multi-step frequency 8 Setting range: 0.00~Max frequency [28.00Hz]
P2. 21 Multi-step frequency 9 Setting range: 0.00~Max frequency [30.00Hz]
P2.22 Multi-step frequency 10 Setting range: 0.00~Max frequency [35.00Hz]
P2.23 Multi-step frequency 11 Setting range: 0.00~Max frequency [38.00Hz]
P2.24 Multi-step frequency 12 Setting range: 0.00~Max frequency [40.00Hz]
P2.25 Multi-step frequency 13 Setting range: 0.00~Max frequency [45.00Hz]
P2.26 Multi-step frequency 14 Setting range: 0.00~Max frequency [48.00Hz]
P2.27 Multi-step frequency 15 Setting range: 0.00~Max frequency [50.00Hz]
Notes: Define Multi-step frequency respectively, which can be used in Multi-step speed running and simple PLC
running.
P2.28 Dec time 2 Setting range : 0.1~3600s [6.0/20.0s]
P2.29 Acc time 2 Setting range : 0.1~3600s [6.0/20.0s]
P2.30 Dec time 3 Setting range : 0.1~3600s [6.0/20.0s]
P2.31 Acc time 3 Setting range : 0.1~3600s [6.0/20.0s]
P2.32 Acc time 4 Setting range : 0.1~3600s [6.0/20.0s]
P2.33 Dec time 4 Setting range : 0.1~3600s [6.0/20.0s]
P2.34 Deceleration time duringabnormal stopping Setting range : 0.1~3600s [3.0/10.0s]
Notes: Define acceleration and deceleration time 2, 3, 4 respectively (acceleration and deceleration time is defined
by P0.18 and P0.19) Acceleration time and deceleration time during inverter operation are determined byexternal terminal via parameters P3.01 ~ P3.11; if they are all disabled, then it is acceleration and decelerationtime 1. When the terminal option is forced outage or unusual stopping, perform according to decelerationtime of unusual stopping. Acceleration and deceleration time of program timing run and jog run is out ofcontrol of external terminals, but is selected by the set parameters.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
108
When the inverter is in unusual stopping state or terminal forced stopping state, it should be stoppedaccording to P2.34 abnormal deceleration stopping time, is subject to the limit of stop mode (P1.10).
the default units of acceleration and deceleration time is s, the acceleration and deceleration time can bereduced or enlarged to 10 times by modifying P2.35 acceleration and deceleration time multiplying factor.
P2.35 acceleration and deceleration timemultiplying factor. Setting range: 0~2 [0]
0: 1 time 1: 10times
2: 0.1timeNotes: Actual acceleration and deceleration time = acceleration and deceleration time × acceleration and
deceleration time multiplying factor
P2.36 Fan control mode Setting range: 0.1 [0]
0: Auto stop mode 1: The fan runs after power onNotes: Auto stop mode
The fan keeps running during inverter operation, internal temperature detection program starts automatically3 minutes after the inverter stops. Running and stopping of the fan is dependent on the module temperatureconditions. When module temperature> 60 ℃, the fan continues to run; when module temperature ≤ 50 ℃,the fan stops. 3004GB and below models do not have temperature measurement module, these models willautomatically shut down after 3 minutes.
The fan runs after power onThe fan runs after power on the inverter
P2.37 Wiring direction of motor Setting range: 0.1 [0]
0: Positive sequence 1: Inverted sequenceNotes: The inverter output positive rotation direction may be inconsistent with the actual positive rotation direction
of the motor. Users can change phase sequence of incoming line of the motor to adjust the rotation directionof the motor or change the function code.
In closed loop vector control mode, if the function code is modified, the direction setting of used encoder (PG)must be modified accordingly.
P2.38 Prohibit reverse operation Setting range: 0.1 [0]
0: Reverse operation disabled Reverse operation enabled
Notes:When it is set to 1: Reverse rotation is disabled, When the keypad is set to reverse running, the inverter will run at 0 frequency When terminal RJOG reverse jog is enabled, the inverter does not run. When the Run command is controlled by terminal and when REV reverse rotation terminal is enabled, the
inverter does not run.
P2.39 IO extended card mode (reserve for 3004GB andbelow models) Setting range: 0.1 [0]
0: Null 1: Full
P2.40 PG extended card model (reserve for 3004GB andbelow models) Setting range: 0 [0]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
109
0: Null 1: Full
P2.41 expanded PG output frequency dividing ratio (reservefor 3004GB and below models) Setting range: 1~128 [1]
P2.42Extended PG pulse number per turn (reserve for3004GB and below models) Setting range: 1~9999 [1000]
P2.43 Extended PG direction setting (reserve for 3004GBand below models) Setting range: 0.1 [0]
P2.44 Built-in PG pulse number per turn Setting range: 1~9999 [1000]
P2.45 Built-in PG direction setting Setting range: 0. 1 [0]
0: A phase advance when foreward rotatio 1: B phase advance when foreward rotatio
P2.46 Speed measurement PG usage selection Setting range: 0, 1 [0]
0: Use built-in PG 1: Use extended PGNotes: P2.41: Set perform how many times of frequency division to AB phase pulse input from pulse encoder,
Z-phase pulse will not have frequency division. P2.42/P2.44: Set according to pulse number per revolution of the actually used pulse encoder. P2.43/P2.45: When it is set to 0, phase A signal of PG card advances phase B signal of PG card, it is regarded
that the motor is in forward rotation; when it is set to 1, phase B signal of PG card advances phase A signal ofPG card, it is regarded that the motor is in reverse rotation. In closed-loop vector control mode, if the speedcannot exceed 5HZ and the current is abnormal, this function code should be modified (modify P2.43 ormodify P2.45 when using extended PG).
P2.46: When it is set to 0, use the built-in PG; when it is set to 1, use extended PG.
P2.47 PG disconnection detection time (reserve) Setting range: 0.0-10.0 [2.0s]
P2.48 PG disconnection operation selection (reserve) Setting range: 0 ~ 3 [ 1]
0: Deceleration stopping 1: Free stopping
2: Abnormal stopping 3: Continue to runNotes: When the inverter is controlled with an encoder, P2.47 is used to define encoder signal disconnection
detection time. If the encoder is disconnected for longer than the time set by P2.47, then the inverter willoperate according to the operation defined by P2.48.
P2.49 PG deceleration teeth number 1 Setting range: 0~1000 [1]
P2.50 PG deceleration teeth number 2 Setting range: 0~1000 [1]Notes: When the encoder (PG) is not mounted directly on the motor shaft, the parameters is required to be set,
number of PG reduction teeth 1 is the same with the number of teeth of the driving wheel on the motor shaftor the diameter; number of PG reduction teeth 2 is the same with the number of teeth of the driving wheel onPG mounting shaft or the diameter.
5.4 I/O Terminal Ctrl (Group P3)
P3.00 Terminal function mode Setting range: 0.1 [0]
0: Close valid 1: Open valid (Normally open and normally close are notlimited)
Notes: Close valid: Signal is enabled if the control terminal and COM terminal are short-circuit;
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
110
Open valid: Signal is disabled if the control terminal and COM terminal are short-circuited. (Normally openand normally close are not limited)
3004GB and below models:P3.01 P3.01 Multi-function input selection TerminalX1 Setting range: 0~79 [1]
P3.02 P3.01 Multi-function input selection TerminalX2 Setting range: 0~79 [2]
P3.03 P3.01 Multi-function input selection TerminalX3 Setting range: 0~80 [37]
P3.04 P3.01 Multi-function input selection TerminalX4 Setting range: 0~81 [0]
P3.05 P3.01 Multi-function input selection TerminalX5 Setting range: 0~82 [0]
P3.06 Reserved -
P3.07 Reserved -
P3.08 Reserved -
P3.09 Reserved -
P3.10 Reserved -
P3.11 Reserved -
P3.12 Reserved -
35R5GB and above models:
P3.01 Multi-function input selection Terminal X1 Setting range: 0~79 [1]
P3.02 Multi-function input selection Terminal X2 Setting range: 0~79 [2]
P3.03 Multi-function input selection Terminal X3 Setting range: 0~79 [37]
P3.04 Multi-function input selection Terminal X4 Setting range: 0~80 [0]
P3.05 Multi-function input selection Terminal X5 Setting range: 0~81 [0]
P3.06 Multi-function input selection Terminal X6 Setting range: 0~82 [0]
P3.07 Multi-function input selection Terminal X7 Setting range: 0~79 [0]
P3.08 Multi-function input selection Terminal X8 Setting range: 0~79 [0]
P3.09 Multi-function input selection Terminal X9 Setting range: 0~79 [0]
P3.10 Multi-function input selection Terminal X10 Setting range: 0~79 [0]
P3.11 Multi-function input selection Terminal X11 Setting range: 0~79 [0]
P3.12 Reserved -
Notes: Control terminals X1 ~ X10 are multi-function terminals, their specific functions can be defined by setting
the value of P3.01 ~ P3.10. Allow duplicate definitions, among repeatedly defined terminals, when oneterminal is active, this function is enabled. Set points and functions are as shown in Table 5-3-1.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
111
Table 5-3-1 Multi-function Input Menu
Setting Function Setting Function
0 NULL: No defined 1 FWD: Running Forward
2 REV: Running Reverse 3 RUN
4 F/R: Running direction 5 HLD: self-hold selection
6 RST: reset 7 FC: Setting frequency selection
8 FJOG: JOG FWD 9 RJOG: JOG REV
10 UP 11 DOWN
12 UP/DOWN Reset 13 FRE: Coast-to-stop
14 Forced stopping (Deceleration timeaccording to abnormal stopping) 15 DC braking
16 Acc/Dec prohibit 17 Inverter running prohibit
18 S1 Multi-step Speed 1 19 S2 Multi-step Speed 2
20 S3 Multi-step Speed 3 21 S4 Multi-step Speed 4
22 S5 Multi-step Speed 5 23 S6 Multi-step Speed 6
24 S7 Multi-step Speed 7 25 Command channel switch to Terminalcontrol 2
26 SS1 Multi-step Speed 27 SS2 Multi-step Speed
28 SS3 Multi-step Speed 29 SS4 Multi-step Speed
30 T1 Acc/Dec time 1 31 T2 Acc/Dec time 2
32 T3 Acc/Dec time 3 33 T4 Acc/Dec time 4
34 TT1 Acc/Dec time 35 TT2 Acc/Dec time
36 Forced outage normally close 37 EH0: External fault signal normally open
38 EH1: External fault signal normally close 39 EI0: External interrupt signal normallyopen
40 EI1: External interrupt signal normallyclose 41 Stopping plus DC brake
42 Start PLC operation 43 Pause the PLC operating
44 Reset PLC stop status 45 Start wobble frequency operation
46 Reset the wobble frequency operatingstatus 47 Start PID operation
48 Speed/torque mode switching 49 Timing drive input
50 Counter trig signal input 51 Counter clear
54 Reserved 55 Reserved
56 Reserved 57 Reserved
58 Reserved 59 Reserved
60 Reserved 61 Reserved
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
112
Setting Function Setting Function
62 Reserved 63 Reserved
64 Reserved 65 Reserved
66 Reserved 67 Reserved
68 Reserved 69 Reserved
70 Reserved 71 Reserved
72 Reserved 73 Reserved
74 Reserved 75 Anti rotor-blocking command (reserve)
76 Zero servo command(reserve) 77 PID output is forced to 0
78 PID integral time reset 79 Command channel switch to Keypadcontrol
80 PUL: Pulse input 81Single phase speed measurement pulse ordouble phase speed measurement A phasepulse input
82Double phase speed measurement Bphase pulse input
Notes to functions listed in Table 5-3-1:
0: NULL: No defined
The defined terminal is invalid. The inverter does not detect the status of the terminal nor response to theterminal. In other words, the function of terminal is forbidden. To avoid disturbance or mistake actioneffectively, define the terminals that are not in use as this function
1~ 5: Operation mode
See P3.15 operation mode setting
6: RST: Reset
In fault state, the inverter can be reset by keypad by pressing “STOP/RESET ” or by terminal on or off, if theterminal has been set as RST function. In running state, it can stop the inverter according to selection of stopmode. RST function is active at the rising edge, so it must be operated as “disabled-enabled-disabled”, shownin Figure. 5-3-1.
Figure. 5-3-1 Terminal reset
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
113
7: Setting frequency selection FC frequency setting options: If the "FC frequency setting options" is "enable function terminals", the
frequency set point is determined by P0.06 running frequency setting combination 2; if this function terminalis inactive, the frequency set point is determined by P0.05 running frequency setting combination 1. Duringinverter operation, frequency setting mode can be switched through FC terminal to control the inverter outputfrequency flexibly.
8~9:Jog operation signal (FJOG/RJOG) If setting is 8 or 9, this terminal can enable jog operation, when inverter didn’t start up by other running
command. FJOG is for jog forward command and RJOG is for jog reverse command, as shown inFigure.5-3-2. The defined Jog function of terminal isn’t limited by run command mode selection (P0.07).When Jog frequency, and jog Acc/Dec time can be defined in P2.00~P2.02.
Operation Freq.(Hz)
P2.00
JOG
Time
Figure. 5-3-2 JOG operation
10~12: UP/DOWN
When P0.05 is 4, the frequency is set to 1 +2Whether the UP/DOWN terminal is effective or not, the reference frequency will be the sum of initial valueof UP/DOWN and frequency setting 2. If any UP/DOWN terminal is effective, the frequency will increase ordecrease at the rate of UP/DN rate (P3.16). And the UP/DOWN frequency range will be from the sub offrequency setting 2 and P3.17 to the sum of frequency setting 2 and P3.17. If UP/DOWN function terminal isnot effective, the frequency reference of UP/DOWN will keep constant. The frequency reference ofUP/DOWN will be saved or not according to the UP/DN reference saving selection P3.18, if UP/DOWNfunction is not effective and STOP key has been pressed. But if UP/DOWN function is effective, thefrequency reference of UP/DOWN will keep the initial value. As shown in Figure.5-3-3.
When P0.05 is not 4, the frequency is set to 1 and terminal is UP / DN;At the beginning of the running, if UP / DOWN terminals are all inactive or are active, then the inverter runsat the initial set point of UP / DOWN (if the value is negative, the inverter runs at 0 frequency); if oneterminal of UP / DOWN is active, then the set frequency is controlled by UP / DOWN terminal, increase ordecrease on the basis of the current speed at the speed of terminal UP / DOWN (P3.16). At this point, if theUP / DOWN terminal is inactive, then the running frequency at this time is the set frequency. When the UP /DOWN terminal is inactive, press STOP key, save the current set frequency to the given value of UP /DOWN in the method determined by the function code P3.18 with the sign as positive. When the UP /DOWN terminal is active, then the given value of UP / DOWN is the initial value as shown in Fig. 5-3-4.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
114
Reference Freq.(Hz)
Frequency setting 2
Run command
UP command
DOWN command
STOP command
amplitude
Frequency setting1+Frequency setting 2 UP/DOWN Terminal RunUP/DN reference
Figure. 5-3-3 UP/DOWN combination operation
NOTES: The terminal UP / DOWN is active only when P0.03 = 8 and when the inverter is in running state.
Operation Freq.(Hz)
UP/DOWNreference Initial
Run Command
UP command
DOWN Command
Stop command
UP/DN reference amplitude
Figure. 5-3-4 UP/DOWN non-combination operation
13: FRE Free stopping When defining terminal of the function is active, the inverter immediately locks PWM output, and exits
running state. Only during FRE releasing, the run command takes effect. Once the function is defined, nomatter the control mode (P0.07) is what, the function is active and is not subject to the limit of stop mode(P1.10).
14: Forced stopping (based on deceleration time of abnormal stopping); 36: Forced stopping normally closed Shut down slowly at deceleration time of abnormal stopping, it is subject to the limit of stop mode (P1.10).15: Stopping process plus DC braking
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
115
Use the terminal to perform DC braking to the system during the stopping process for accurate positioning ofthe motor. Braking starting frequency, braking waiting time, brake current are defined in P1.11 ~ P1.14; thebraking time is bigger one between the time defined by P1.15 and the effective duration of the controlterminal, which is as shown in Fig. 5-3-5.
Figure. 5-3-5 DC braking
16: Acc/Dec prohibit The motor operate at present speed without being influenced by external signal (except STOP command).17: Inverter running prohibition When the terminal is active, the inverter during running will freely stop, the standby state is prohibited to
enable. It is mainly used in occasions where safety interlock is needed.18 ~ 24, 26 ~ 29: Multi-stage speed Start / stop control of multi-stage speed operation can choose keypad, terminal command or serial
communication. S1 ~ S7: Multi-stage speed command, it is used to specify that the set frequency of theinverter is one stage from multi-stage speed frequency S1 to S7 (P3.01 ~ P3.11). If two or more multi-stagespeeds are active, the terminal of smaller number takes precedence. SS1 ~ SS4 multi-stage speed command,defined through combination, is used to specify the multi-stage speed, and it has up to 15 stages of speed. Asshown in Table 5-3-2:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
116
Table 5-3-2 Multi-stage frequencySelected frequency Legend
SS4 SS3 SS2 SS1 FrequencysettingOFF OFF OFF ON Multi-stagefrequency 1OFF OFF ON OFF Multi-stagefrequency 2OFF OFF ON ON Multi-stagefrequency 3OFF ON OFF OFF Multi-stagefrequency 4OFF ON OFF ON Multi-stagefrequency 5OFF ON ON OFF Multi-stagefrequency 6OFF ON ON ON Multi-stagefrequency 7ON OFF OFF OFF Multi-stagefrequency 8ON OFF OFF ON Multi-stagefrequency 9ON OFF ON OFF Multi-stagefrequency 10ON OFF ON ON Multi-stagefrequency 11ON ON OFF OFF Multi-stagefrequency 12ON ON OFF ON Multi-stagefrequency 13ON ON ON OFF Multi-stagefrequency 14ON ON ON ON Multi-stagefrequency 15OFF OFF OFF OFF Generaloperation
If one or more terminal(s) among the 4 terminals is (are) not set, the terminal(s) not set is (are) default as OFF. Allowduplicate definitions, among repeatedly defined terminals, when one terminal is active, this function is enabled. If you define both S1 ~ S7 and SS1 ~ SS4 at the same time, then terminals S1 ~ S7 take precedence.25: Command to switch to the terminal control 2, when this function is enabled, the command channel is switched toterminal control 2.79: Command to switch to the keypad control, when this function is enabled, the command channel is switched tokeypad control.30~35: Default acceleration and deceleration T1 ~ T4: individually specify the acceleration and deceleration time during running. If two or more
acceleration and deceleration times are active, the terminal of smaller number takes precedence. TT1 ~ TT2: Combination specifying the acceleration and deceleration time of the running time. As shown in
Table 5-3-3.
Table 5- 3- 3T2 TT1 The selected acceleration and deceleration time
OFF OFF Acceleration and deceleration time 1OFF ON Acceleration and deceleration time 2ON OFF Acceleration and deceleration time 3ON ON Acceleration and deceleration time 4
If simultaneity defined T1~T4 and TT1~TT2, T1~T4 is prior. 37~40: External fault signal / External interrupt signal (normally open / normally close EH0 - External fault signal normally open / EH1 - External fault signal normally close: External fault
command. If the setting is 37-40, the fault signal of external equipment can be input by the terminal. Once theinverter receives the fault signal, it stops output immediately, and displays last fault code. After the externalfault signal is removed, the inverter needs to be reset before restarting. Tips: Inverter can’t reset if externalfault signal isn’t released. EH0 and EH1 are not influenced by P3.00 (Terminal function mode), Shown inFigure.5-3-6.
Time
Operation Freq
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
117
EI0 - External interrupt signal normally open / EI1 - External interrupt signal normally close: Duringoperating, the inverter stops its output and runs at zero-speed when it receives external interrupt signal. Oncethe signal is removed, the inverter will start and resume normal operation. Please refer to note of EH0 andEH1 above. As shown in Figure. 5-3-6.
KM
Xj(External fault signal/External interrupt signalinput )
Xi(External fault signal/External interrupt signalinput)
Fault relay
COM
Figure. 5-3-6 Normally open / normally close
41: StoppingStopping plus DC brake
Use the terminal to DC brake on the system in the stoppingstopping state to prevent motor malfunction.42~44: Terminal PLC Control
PLC input: Program timing running. Replace the frequency setting 1 with PLC; wobble frequency input / PIDinput is the same. When using frequency setting source 2, PLC input is inactive.
PLC pause: Pause the program timing running. When the terminal is active, pause the program timingrunning, and the inverter runs at 0 frequency; it will continue running at the breakpoint after canceling thepause instruction. When pressing "STOP" key during effective period of the terminal, the program runningcounter is cleared, it needs to start in the start-up mode when starting up next time. If the inverter does notwork under program run mode, then the function is meaningless.
PLC stoppingstopping reset: stoppingstopping state under the PLC operating mode, when the functionterminal is active, the running phase, running time and other information remembered at the time ofstoppingstopping of PLC will be cleared.
45~46: Terminal wobble frequency running Wobble frequency input: Wobble frequency running, replace the frequency setting 1 with wobble frequency
running. When using frequency setting source 2, wobble frequency input is inactive. Reset the wobble frequency operating status: In stop state of wobble frequency operation, the valid terminal
can clear the wobble frequency operating information memorized in stop.47: Terminal PID operation PID input: PID running, replacing the frequency setting 1 with PID closed loop. When using frequency
setting source 2, PID input is inactive48: Speed/torque mode switch, In the vector control mode, set by P8.10 torque control mode. When the terminal is set and valid, torque mode
will automatically switch. For example: when P8.10 is set to 0 (according to the speed mode), when theterminal is set to 48 and valid, the operation mode is automatically switched to the torque mode.
49.53: Timing drive input If the 49 terminal is valid, start the timing, else zero-clear. If the timing arrives at preset setting of P3.33, stop timing. As shown in Figure.5-3-7: When the 53 terminal is valid, the unit of P3.33(preset of timing arriving) will be minutes, or it will be
second.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
118
Fig. 5-3-7 Timing driving input50: Counter's trig signal input This terminal is used for pulse input to the internal counter of the inverter. The highest pulse frequency is 650
Hz. The present counting value can be saved when power off.51: Counter clear This terminal is used to clear the counter to zero. The terminal function is in conjunction with Counter's trig
signal input.52: Actual Length clearing When terminal 52 is enabled, the setting of P6.01 (actual length) will be cleared to zero.54~74:Reseved75: Anti-blocking action command (Reserve)76: Zero servo command(Reserve)77: PID output forced set to 0 During speed PID run time, when the terminal is active, the output is forced to set to the set speed;
during analog PID run time, when the terminal is active, the output is forced to set to zero frequency;78. PID integral time reset
In the PID operation mode, PI control generally. When the terminal is set and valid, there will be onlyproportional regulation and the integral regulation is 0.
80: PUL: Pulse input The input pulse frequency can be used as frequency reference. See Parameter Group P4 for the relationship
between input pulse frequency and the reference frequency.81: Single phase speed measurement pulse or double phases speed measurement A phase pulse input Built-in PG card single-phase tachometer pulse or two-way speed measurement pulse Phase A pulse input
terminal function; terminals specified by this function are connected to Phase A pulse of pulse generator orencoder (PG) to achieve single-phase pulse speed feedback.
82: Biphase speed measurement Phase B pulse input phase Built-in PG card biphasic speed measurement Phase B pulse input function, the terminals specified by this
function are connected to Phase B of pulse encoder (PG) to achieve diphasic pulse speed feedback togetherwith No. 81 function terminal.
Tips:
Built-in PG card only supports incremental collector output type photoelectric encoder with the voltage rangeof 12 ~ 30 VDC, and the connection mode is shown in Fig. 2-22 and Fig. 2-23.Other types of encoders require corresponding expanded PG cards.
P3.13 X terminal filter time Setting range : 0.002s~1.000 [0.010s]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
119
Explanation: The filter time constant digital filtering process on the input signal, in order to prevent the influence of the
interference signal on the system stablility. If the filter time constant is too large, the control is stable, but control response is bad; if the filter time
constant is small, the response is fast, but the control may not be stable. If the best setting value is unknown,you can appropriately adjust the setting value according to the unstable or response delay.
P3.14Reserved Reserved
Terminal function mode setup Setting range : 0~3 [0]
0: Two-wire operation mode 1 1: Two-wire operation mode 2
2: Three-wire operation mode 1 - self hold function (attach any one of X1 ~ X10 (3004GB and below X1~ X5)terminals)
3: Three-wire operation mode 2 - self hold function (attach any one of X1 ~ X10(3004GB and below X1~ X5)terminals)
Notes: Only when the inverter operation command control mode (P0.07) is terminal control mode, two-wire 1 and 2,
three-wire 1 and 2 are meaningful. 2-wire control mode 1
FWD, REV: Running at preset direction. FWD means running forward, and REV means running reverse.You can control the motor’s running direction by switch terminal FWD and REV. If FWD is valid, runforward; if REV is valid and P2.38 is set to 1 (Prohibit reverse operation enabled), The inverter willstop. If P2.38 is 0 (Prohibit reverse operation disabled), the inverter will run reverse. If FWD and REV arevalid or invalid at the same time, the inverter will stop. Terminals wiring is shown in Figure.1
2-wire control mode 2In this mode, both function RUN (Run command) and F/R (Running direction) are used: If RUN is enabled,the inverter will startup. If F/R is selected but disabled, the inverter will run forward. If F/R is selected andenable, the inverter will run reverse. When F/R is not selected, the running direction is defined by functioncode. If RUN is disabled, the inverter will stop. Terminals wiring is show in Figure.2
3-wire control mode 1FWD, REV: Run at preset direction. FWD means running forward, and Rev means running reverse. You cancontrol the motor’s running direction by switch terminal FWD and REV. If FWD is enabled, the inverter willrun forward; If REV is enabled, the inverter will run reverse. If FWD and REV are enabled or disabled, theinverter will stop.If HLD is ON, FWD and REV signal will self-hold. If HLD is OFF, the inverter will release self-holding andstop. Terminals wiring is show in Figure.3
3-wire control mode 2In this mode, both function RUN (Run command) and F/R (Running direction) are used: If RUN is enabled,the inverter will startup. If F/R is selected but disabled, the inverter will run forward. If F/R is selected andenable, the inverter will run reverse. When F/R is not selected, the running direction is defined by functioncode. If RUN is disabled, the inverter will stop. If HLD is ON, RUN signal will self-hold. If HLD is OFF, theself-holding will be released. Terminals wiring is show in Figure.4.
In Figure. 3, SB1 is Stop button, SB2 is running forward button. Press SB2 or SB3 to startup the inverter, andswitch SB2, SB3 to change the running direction. Press SB1 to stop the inverter output.
In Figure.4, SB1 is Stop button, SB2 is running button, and K is running direction button. Press SB2 tostartup the inverter. Press switch K to change the running direction. Press SB1 to stop the inverter output.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
120
图2F/R
RUN
COM
图 1REV
FWD
COM
图4F/R
HLD
COM
RUN
SB1 SB2
K图 3HLD
REV
COM
FWD
SB1SB2
SB3
P3.16 Terminal UP/DN rate Setting range: 0.01~99.99Hz/s [1.00Hz/s]
P3.17 UP/DN reference amplitude Setting range:0.00~Frequency upper limit [10.00Hz]
Notes: Terminal UP/DN rate is used to define the change rate of reference frequency that is changed by terminal
UP/DN. UP/DN reference amplitude used to define that the span of reference frequency is changed byterminal UP/DN.
3.18 Digital frequency UP/DOWN save selection Setting range: 0~2 [2]
0: Receive STOP, UP/DN reference is reset to zero;
1: Receive STOP, UP/DN reference is not reset to zero, and not saved when power loss;
2: UP / DOWN set point not is reset to 0 after receiving STOP, which will save to function code after power off;when P0.03 is set to 1, P0.02 adjusts power-off saving online.
Notes: UP / DOWN operation is shown in Fig. 5-3-3,5-3-4. When P0.03 is set to 1 during the keypad setting frequency: When P3.18 is set to 2, the digital set frequency
(P0.02) adjusts the power-off saving; when P3.18 is not set to 2, it will not be saved after power failure,please see P0. 02 description for details.
P3.19 D0 terminal function definitions Setting range: 0 ~ thirty-five [ 0]
P3.20 Y1 terminal function definition (reserve for 3004GB andbelow models) Setting range: 0 ~ thirty-five [ 1]
P3.21 Y2 terminal function definition (reserve for 3004GB andbelow models) Setting range: 0 ~ thirty-five [ 0]
P3.22 Y3 terminal function definition (reserve for 3004GB andbelow models) Setting range: 0 ~ thirty-five [ 0]
P3.23 Y4 terminal function definition (reserve) Setting range: 0 ~ thirty-five [ 0]
P3.24 relay 1 (TA / TB / TC) output function selection Setting range: 0 ~ thirty-five [ nineteen]
P3.25 relay 2 (BRA / BRB / BRC) output function selection(reserve for 3004GB and below models) Setting range: 0 ~ thirty-five [ 0]
Fig. 1
Fig. 3 Fig. 4
Fig. 2
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
121
Table 5-3-4 Multi-function Terminal Output Value
Corresponding function Functional description0 NULL NA1 RUN When the inverter is in operation mode, the terminal output is active2 FAR frequency arrival Refer to P3.26 frequency reaching detection width
3 FDT frequencydetection
See P3.27, P3.28 frequency detection value and frequency detection lagcorrelation description
4 FDTH upper limitfrequency arrival
Set frequency ≥ upper limit frequency and the running frequency reaches theupper limit frequency and has delayed, the terminal output is active.
5 FDTL lower limitfrequency arrival
Set frequency ≤ lower limit frequency and the running frequency reacheslower limit frequency, the terminal output is active
6 Upper and lower limitsof wobble frequency
After selecting the wobble frequency function, if the frequency fluctuationrange of the wobble frequency calculated based on the center frequencyexceeds upper limit frequency or is lower than the lower limit frequency, theterminal output is active.
7 Inverter is in zero speedoperation
When the output frequency of the inverter is 0, but the inverter is in operationmode, the terminal output is active
8Simple PLC stageoperation completionindication
When simple PLC completes the current phase operation, the terminal outputis active (single pulse signal with the width of 500ms)
9 PLC cycle completionindication
When simple PLC completes one operation cycle, the terminal output isactive (single pulse signal with the width of 500ms)
10Completion ofreadiness for operationof inverter (RDY)
When the inverter shuts down and can start up at any time, the terminaloutput is active (No fault, no running prohibition, no interruption, no reset,no free stoppingstopping, no Uu alarm, etc.)
11 Free stoppingstopping Terminal output is active during free stoppingstopping (single pulse signalwith the width of 500ms)
12 Auto restart Terminal output is active when the inverter restarts due to auto reset becauseof fault (single pulse signal with the width of 500ms)
13 Timing arrival See description in "timing driving input"14 Counting arrival output Terminal output active after the counting reaches the set point
15 Set running time arrival When the inverter's accumulated running time (PE.09) reaches the setrunning time (P3.34), the terminal output is active
16 Torque arrival detectionTorque reaches the set point, the terminal output is active, and when the it isless than 80% of the set point, terminal output is inactive
17 CL current-limit action
When the output current reaches the current amplitude limit level (Pd.09), theterminal output is activeWhen the current amplitude limit level is less than 90%, the terminal outputis inactive
18 Overvoltage stallWhen the DC bus voltage reaches the stall overvoltage point (Pd.11), theterminal outputs active signal; when it is less than 95% of the overvoltagestall point, the terminal output is inactive
19 Inverter failure When the inverter has a fault, the terminal output is active
20 External downtime(EXT)
When the inverter has an external fault tripping alarm, the terminal output isactive
21 Uu1 under-voltagestoppingstopping
When the DC bus voltage is below the under-voltage set point, the terminaloutput is active
22 CE communicationalarm When there is an external communication alarm, the terminal output is active
23 OLP2 overloadpre-alarm
When the output current exceeds the overload pre-alarm action value of theinverter, the terminal output is active
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
122
Corresponding function Functional description
24 Abnormality of analogsignal 1
When the signal level of the analog signal is less than the minimum value orhigher than the maximum value of the signal continuously for 500ms, theterminal output is active
25 Abnormality of analogsignal 2
When the signal level of the analog signal is less than the minimum value orhigher than the maximum value of the signal continuously for 500ms, theterminal output is active
26 STEP Steps of programrunning
It indicates the number of steps of program running. For output content andthe corresponding number of steps of program running, please see Table5-3-5 (reserves for 3004GB and below modes)
27 ERR fault alarm Output signal and the corresponding failure are shown in Table 5-3-528 Cut-to-length arrival Terminal output is active when the Cut-to-length reaches the set point29 Sleeping When the system is sleeping, the terminal output is active30 Zero speed When the output frequency is 0, the terminal output is active
31 Zero servo state(reserve) Reserve
32 Reverse control signal(reserve) Reserve
33 Actual direction ofrotation
When the inverter switches the direction, the output level signal is alsochanged accordingly
34 Abnormality of analogsignal 3
When the signal level of the analog signal is less than the minimum value orhigher than the maximum value of the signal continuously for 500ms, theterminal output is active
35 Underload detectionsignal (ULP) When the inverter is under load, the underload detection signal is active
Notes: This series of inverters have 7 ways of digital outputs, the output terminals D0, Y1, Y2, Y3, relay 1, relay 2
are programmable multi-function terminals (there are only two ways of digital outputs for 3004GB and belowmodels, and the output terminal are D0 and relay 1). Users may select some control and monitoring signals(shown in Table 5-3-3) based on their needs.
When selecting the collector output as the indication of number of steps of program running or faultindication, content of function definitions must be the same, is 26 or 27 to make combination of D0, Y1, Y2or combination of D0, Y1, Y2, Y3 active. (3004GB and below models have no such combination)
Indication of ERR fault types are shown in Table 5-3-5, STEP indication of number of steps of programrunning is shown in Table 5-3-6.
Table 5-3-5 Indication of ERR fault types
Y2 Y1 D0 Fault type MeaningOFF OFF ON OC Over-CurrentOFF ON OFF SC Short CircuitOFF ON ON OU Over VoltageON OFF OFF Uu1 Under VoltageON OFF ON OH1 OverheatON ON OFF OL2 Inverter OverloadON ON ON EH External Fails
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
123
Table 5-3-6 STEP Indication of number of steps of program running
Y3 Y2 Y1 DO Steps of programrunning
OFF OFF OFF ON T1OFF OFF ON OFF T2OFF OFF ON ON T3OFF ON OFF OFF T4OFF ON OFF ON T5OFF ON ON OFF T6OFF ON ON ON T7ON OFF OFF OFF T8ON OFF OFF ON T9ON OFF ON OFF T10ON OFF ON ON T11ON ON OFF OFF T12ON ON OFF ON T13ON ON ON OFF T14ON ON ON ON T15
P3.25 Cut-to-length reaching terminal output hold time(3004GB and below models) Setting range: 0.0 ~ 3.0s [1.0s]
Notes: 3004GB and below models: P3.25 is used to set this function, otherwise it is used for selection of output
function terminal of relay 2, please see the above description for details; In P3.19, P3.24, set DO, relay 1 output is active when it is "fixed length reaching". When P3.25 is set to 0: Cut-to-length reaching terminal output signal holds for a long term until the length is
cleared. When P3.25 is not set to 0: value of P3.25 represents the terminal output signal hold time after the fixed
length reaches the set point.
P3.26 frequency reaching detection width Setting range: 0.00 ~ 10.00 Hz [2.50 Hz]Notes: When the output frequency reaches the set frequency, the function adjusts its detection width. The adjustment
range is 0 ~ ± 10.00Hz of the set frequency. When the inverter's output frequency is within the positive andnegative detection width of the set frequency, specify terminal output active signal, as shown in Fig. 5-3-8.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
124
Detection width
Time
Time
ReferenceFreq.
Operating Freq.(Hz)
FAR signal
Figure. 5-3-8 FAR detection diagram
P3.27 FDT level Setting range: 0.00~Maximum frequency [50.00Hz]
P3.28FDT lag Setting range: 0.00~10.00Hz [1.00Hz] Note
When the output frequency reaches a certain preset frequency (frequency detection threshold), Y terminaloutput will be valid. We called the preset frequency FDT level. In the dropping of output frequency, Yterminal output keep valid, until the output frequency drops below another certain frequency of FDT level,which is called release frequency (FDT1 level-FDT1 lag), as shown in Figure. 5-3-9.
FDT lag
Tim e
Tim e
FDT leve l
Output Freq.
FDT signal
Fig. 5-3-9 Frequency detection FDT
P3.29 Frequency upper limit arriving output delaytime
Setting range: 0.0~100.0s [0.0s]
P3.30 Frequency lower limit arriving output delaytime
Setting range: 0.0~100.0s [0.0s]
Notes: These two functions are enabled when setting D0, Y1, Y2, Y3, relay 1, relay 2 output (3004GB and below
models set DO, relay 1) in P3.19 ~ P3.25 option as ""FDTH upper limit frequency reaching" or "FDTL lowerlimit frequency reaching". Typically, these two functions are set to prevent load joggling and signal instability
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
125
when switching between power frequencies and frequency conversion of multiple motor, as shown in Fig.5-3-10.
Operating Freq.(Hz)
Frequencyupper limit
FDTH
Time
FDTL
Frequencylower limit
FDTH Delay time EDTL Delay time
Figure. 5-3-10 FDTH/FDTL
P3.31Torque detection reference Setting range: 0.0~200.0% [100.0%]
Notes: If motor torque is equal to or more than the range of torque detection reference, the output of terminal is
valid. If the motor torque is less than 80% of reference, the output of terminal is invalid, as shown in Figure.5-3-11
Output torque
Torque detection reference
Torque arrivingdetection signal
Time
Torque detection reference*80% Torque arriving
detection
Fig. 5-3-11 Torque reaching detection
P3.32 Preset Count value Setting range: 0~9999 [0]Notes:When the counter value is equal to this value, the terminal output is active, as shown in Fig. 5-3-12.
1 2 3 4 5 6 7 8Xi Input
Counting valuearriving output
Preset Counting value
Figure. 5-3-12 Count value arriving
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
126
P3.33 Preset timing arriving Setting range: 0.0~6553.0 [0.0]Notes: When the timing is equal to this value, the terminal output is active, as shown in Fig. 5-3-7. The unit of P3.33 timing is identified by function terminal 53; the cumulative time of timing is cleared only
when terminal 49 is inactive, otherwise it remains original.
P3.34 Preset operating time Setting range: 0~65530h [65530]
Notes:
When the total operating time reaches the preset operating time (P3.26), the output of terminal is valid.
P3.35 underload detection set value Setting range: 0 ~ 200.0 % [10.0 %]P3.36 underload detection terminal output delaytime Setting range: 0 ~ 100.0s [5.0s]
Notes: P3.35 Underload detection set point 0~200.0% corresponds to 0 ~ 2 times of the rated torque. When the
actual output torque is less than P3.35 set point, the terminal has output if the underload detection terminalsetting is active after P3.36 (underload detection terminal output delay time); when the torque increases and isgreater than the set point of P3.35, the terminal output is inactive.
5.5 Analog and pulse function (Group P4)P4.00 Analog Nonlinear Selection Setting range: 0~3 [0]0: Null 1: AI12: AI2 3: Pulse
Notes: If the setting is 0, P4.01~P4.05 are used to define AI1 inputs, P4.06~P4.10 are used to define AI2 inputs, and
P4.11~P4.15 are used to defined pulse inputs. They are independent and have no interference with each other.
If the setting is not 0, it will be nonlinear selection, all the parameters from P4.01 to P4.15 are setting pointsfor the selected channel by P4.00. The filter time according to the selected channel setting and the physicalvalue of the others are 0.
If the setting of P4.00 is 1 or 2, the selection will be analog input and the default values to each channelarranged from small to great are: 0.00V, 2.00V, 4.00V, 6.00V, 8.00V, 10.00V;
If the setting is 3, the selection will be pulse input. While the default input to the channel are: 0.00 kHz, 10.00kHz, 20.00 kHz, 30.00 kHz, 40.00 kHz, and 50.00 kHz. The default physical values are linear relation.
Tips: Only when the value of P4.00 is changed and saved by pressing the “ENTER” key, the input channel value canbe initialized to the default value.
P4.01 AI1 Minimum analog input value) Setting range: 0.0~P4.03 [0.00V]P4.02 Corresponding physical quantity of input value ofAI1 minimum analog Setting range: -100.0%~100.0% [0.0%]
P4.03 AI1 maximum analog input value Setting range: P4.01~10.00V [10.00V]P4.04 Corresponding physical quantity of input value ofAI1 maximum analog Setting range: -100.0%~100.0% [100.0%]
P4.05 AI1 Analog input filter time constant Setting range: 0.01~50.00s [0.05s]P4.06 AI2 Minimum analog input value Setting range: 0.00~P4.08 [0.00V]P4.07 Corresponding physical quantity of input value ofAI2 minimum analog Setting range: -100.0%~100.0% [0.0%]
P4.08 AI2 Maximum analog input value Setting range: P4.06~10.00V [10.00V]P4.09 Corresponding physical quantity of input value of Setting range: -100.0%~100.0% [100.0%]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
127
AI2 maximum analogP4.10 AI2 Analog input filter time constant Setting range: 0.01~50.00s [0.05s]P4.11 Minimum pulse input value (pulse input terminal) Setting range: 0.00 kHz~P4.13 [0.00 kHz]P4.12 Corresponding physical quantity of input value ofminimum pulse quantity Setting range: -100.0%~100.0% [0.0%]
P4.13 Maximum pulse input value (pulse inputterminal) Setting range: P4.11~50.00kHz [50.00 kHz]
P4.14 Corresponding physical quantity of input value ofmaximum pulse quantity Setting range: 0.0~100.0% [100.0%]
P4.15 Pulse input filter time constant (pulse inputterminal) Setting range: 0.01~50.00s [0.05s]
P4.16 AI3 Minimum analog input value (reserve for3004GB and below models) Setting range: -10.00~P4.18 [0.00V]
P4.17 Corresponding physical quantity of input value ofAI3 minimum analog(Reserve for 3004GB and below models)
Setting range: -100.0%~100.0% [0.0%]
P4.18 AI3 Maximum analog input value (reserve for3004GB and below models) Setting range: P4.16~10.00V [10.00V]
P4.19 Corresponding physical quantity of input value ofAI3 maximum analog(Reserve for 3004GB and below models)
Setting range: -100.0%~100.0% [100.0%]
P4.20 AI3 Analog input filter time constant(Reserve for 3004GB and below models) Setting range: 0.01~50.00s [0.05s]
Note 1: Min/Max virtual value of analog input is the Min/Max virtual value of the input signals. If the actual value
input is smaller than min value, the min value will be treated as the Min virtual value of analog input. If theactual value input is greater than the max value, the max value will be treated as the Max virtual value ofanalog input. The max virtual value of analog input must be greater than the min.
Physical value corresponding to virtual value of analog input: The physical value can be reference frequency,rotate speed, or pressure, etc.
This series of 35R5GB and above models of inverters are provided with four groups of analog input signals:analog input terminals AI1, AI2, AI3, pulse; 3004GB and below models of inverters are provided with threegroups of analog input signals: analog input terminals AI1, AI2 and pulse. Users can define input / outputcurve for each channel, and can define a total of four groups.
AI1 and AI2 input signals can be 0 ~ 10V voltage signals, or 0 ~ 20mA current signals, are selected by theusers through toggle switch on the control board (SW1 toggle switch is at 1 position, which means when it isOFF, it corresponds to 0-10V, while when it is on, it corresponds to 0-20mA). The AI3 input signalcorresponds to-10V ~ 10V voltage signal.
Through setting P4.01~P4.04, P4.06~P4.09 and P4.11~P4.14, P4.16~P4.19 can defined two characteristiclinear curves. The positive and negative function is shown in Figure.5-4-1.
%
Min analogvalue (V)
Max analogvalue (V)
Physical valuecorresponding to Minanalog value Input%
Physical valuecorresponding to Maxanalog value Input%
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
128
%
Min analogvalue (V)
Max analogvalue (V)
Physical valuecorresponding to Minanalog value Input%
Physical valuecorresponding to Maxanalog value Input%
Figure. 5-4-1 Analog input linear curve
Note 2: When P4.00 is set to 1, 2, or 3, the function of P4.01~P4.04, P4.06~P4.09 and P4.11~P4.14 are combined for
one physical value, which is different to Note 1. User can define their own nonlinear curves by setting theseparameters. Six points can be set on the curve. As shown in Figure. 5-4-2. In addition, the setting value toP4.01, P4.03, P4.06, P4.08, P4.11, P4.13 must increase in order.
P hysical value corresponding toanalog value Input%
P4.08P4.03 P4.13P4.01 P4.11P4.06
Analoginput
P4.02 P4.04P4.07
P4.09P4.14P4.12
Figure. 5-4-2 Analog input non-linear curveNote 3: The input filter time constant is used for digital filter of the input signal, in order to avoid interference of the
system. The bigger the filter time constant, the higher the immunity level and the longer the response time is. On the
contrary, the smaller the time constant, the shorter the response time and the lower the immunity level is. Ifthe best setting is not clear, you can adjust setting value according to the status of control stability andresponse delay time.
P4.21 AO1 function definition Setting range: 0~14 [0]P4.22 AO2 function definition(reserve for 3004GB and below models) Setting range: 0~14 [0]
P4.23 AO3 function definition(reserve for 3004GB and below models) Setting range: 0~14 [0]
P4.24 DO function definition Setting range: 0~14 [0]0: NULL 1: Output current (0-2IN)2: Output voltage (0 (0 ~ 10V / 0 ~ 20mA) maximumvoltage) 3: PID setting (0 ~ 10V)
4: PID feedback (0 ~ 10V) 5: Calibration signal (5V )
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
129
6: Output torque (0 ~ 2 times of the rated motor torque) 7: Output power (0 ~ 2 times of the ratedpower)
8: Bus voltage (0 ~ 1000V) 9: AI1 (0 ~ 10V / 0 ~ 20mA)
10: AI2 (0 ~ 10V / 0 ~ 20mA)eleven: AI3 (0~10V corresponds to-10V~10V) (reserve for 3004GB and belowmodels)
12: Output frequency before compensation (0 ~ maximumfrequency)
13: Output frequency after compensation (0 ~maximum frequency)
14: Current speed (0 to 2 times of the rated speed)Notes: This series of inverters (3004GB and below models of inverters are provided with one way) are provided with
3 ways of analog signal output. The output signals are analog voltage and current signals with the full rangeof DC 10V or 20mA. The output content is selected by the users. The full-scale pointer can be adjusted basedon the actual needs.
P4.25 AO1 output range selection Setting range: 0.1 [0]P4.26 AO2 output range selection (reserve for 3004GB andbelow models) Setting range: 0.1 [0]
P4.27 AO3 output range selection (reserve for 3004GB andbelow models) Setting range: 0.1 [0]
0:0-10V / 0-20mA 1: 2-10V / 4-20mAP4.28 AO1 gain Setting range: -10.00~10.00 [1.00]P4.29 AO2 gain (reserve for 3004GB and below models) Setting range: -10.00~10.00 [1.00]P4.30 AO3 gain (reserve for 3004GB and below models) Setting range: -10.00~10.00 [1.00]
Notes: Inverter output signals and user instrumentation system may produce errors, if the user needs to calibrate the
instrument display error or change the instrument display range, AO1, AO2 or A03 gains can be defined foradjustment.
In order to avoid fluctuations in the output data during adjustment, the system can be set to output standardcalibrated signals (set values of P4.21 ~ P4.23 to 5, DC5V output (50% of the full scale) is obtained) to adjust
AO* gain. When adjusting AO1, enter function code P4.28, rotate the knob + or - to make the
output signal be 5V, it will takes effect immediately after modifying the value of function code P4.28, thensave by pressing Enter key. The same steps when calibrating AO2 and AO3.
If the peripheral instruments have large errors, then it is necessary to connect instrumentation for actualcalibration.
P4.31 AO1 offset Setting range: -100%~100% [0.0%]P4.32 AO2 offset (reserve for 3004GB and belowmodels) Setting range: -100%~100% [0.0%]
P4.33 AO3 offset (reserve for 3004GB and belowmodels) Setting range: -100%~100% [0.0%]
Notes: If the offset is represented by "b", the gain is represented by "k", the actual output is represented by "y", the
standard output is represented by "x", the actual output is y = kx +10 b; AO1, AO2, AO3 offset 100 %corresponds to 10V (20mA). Standard output means 0 to maximum value of the corresponding analog outputwhen the output is 0 ~ 10V (20mA). It is generally used to correct null shift of analog output and derivationof the output amplitude. It can also be customized to any desired output curve. For example: If the analogoutput is running frequency, and it is desired to output 8V (16mA) when the frequency is 0 and to output 3V(6mA) when the frequency is maximum, then the gain should be set to "-0.50", the offset should be set to"80%".
P4.34 Max output frequency of DO Setting range: Min Pulse value output of DO~50.00kHz[10.00kHz]
P4.35 Min output frequency of DO Setting range: 0.00~Max Pulse value output of DO [0.00kHz]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
130
5.6 PLC Operating (Group P5)P5.00 PLC Operating mode Setting range: 0~2 [2]
0: Single cycle 1 1: Single cycle 2 (holding the final value)
2: Continuous operationNotes: Single cycle 1
The inverter stops automatically after one cycle of operation and will start when receiving RUN commandagain. As shown in Figure. 5-5-1.
T1 T2 T3 T4 T5 T6 T7
运行命令
f1
f2
f3
f4
f5f6
f7
运行频率(Hz)
时间
Figure. 5-5-1 Stop mode after single cycle of PLC
Single cycle 2 (holding the final value)The inverter will hold the operating frequency and direction of last step after completing one cycle ofoperation. As shown in Figure. 5-5-2
Running frequency (Hz)
Time
Run command
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
131
Figure. 5-5-2 Holding the frequency after single cycle Continuous operation
The inverter will start next cycle of operation automatically after completing one cycle of PLC operation untilreceiving stop command. As shown in Figure. 5-5-3.
Run command
Time
Running frequency (Hz)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
132
T1 T2 T3-T12 T13 T14 T15
运行命令
f1
f2
f3-f12
f13f14
f15
运行频率(Hz)
时间
T1 T2 T13 T14 T15
f1
f2
f13f14
f15
T1 T2
f1
f2
第一次循环 第二次循环
停机命令
T3-T12
f3-f12
Figure. 5-5-3 Continuous operation of PLC
P5.01 PLC restarting mode selection Setting range: 0~2 [0]
0: Restart from first step 1: Continue from the step where the inverter stops2: Continue to operate at the frequency when theinverter stops
Notes: Restart from first stage
If the inverter stops during PLC operation because of receiving stop command or fault, or power loss, it willrestart from the first step after restarting.
Continue from the step where the inverter stopsWhen the inverter stops during PLC operation because of receiving stop command or fault, it will record theoperating time and will continue from the step where the inverter stops, and restart at the frequency defined forthis step, as shown in Figure.5-5-4
T1 T2 T3 T4 T6 T7
运行命令
f1
f2
f3
f4
f5f6
f7
运行频率(Hz)
时间
中断时刻
从中断时刻的阶段频率继续运行
a1
a2d3
a3a4 d5
a5a6
a7
阶段5已运行时间阶段5剩余时间
Figure. 5-5-4 PLC start mode 1
Running frequency (Hz)
Time
First cycle Second cycle
Run command
Stop command
Continue to run at the stage frequency atthe moment of interrupt
Running frequency (Hz)
The remaining timeof Phase 5The run time of Phase 5
Run command
Interruptiontime
Time
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
133
Continue to run at the operation frequency at the moment of interruptStoppingStopping during running (caused by stop command or failure), the inverter not only automaticallyrecords the run time of the current phase, but also records the running frequency at the time ofstoppingstopping. The inverter will restore to the running frequency at the time of stoppingstopping whenrestarting, and then continue to the operation in the remaining phases, as shown in Fig. 5-5-5.
Tips:
The difference between way 1 and 2 lies in that way 2 remembers one more running frequency at the time ofstoppingstopping than way 1, and the inverter continues to run from the frequency.
T1 T2 T4 T5
Run command
f1
f2
f3f4
f5
Operation Freq. (Hz)
Time
Stopping signal
Continue to operate at the frequency when the inverter stops
a1
a2
a3
a4a5
Remnant time of stage 3
d3
Operating time of stage 3
Figure. 5-5-5 PLC start mode 2
P5.02 Saving PLC status when power off Setting range: 0.1 [0]
0: Not save 1: SaveNotes: Not save
The inverter does not save the PLC operating state when the power is off and restart from the first stage afterthe power is on.
Storage: Memory PLC running state at the time of power failure, including power failure time phases,operating frequency, the run time. Run in PLC interruption running restart mode defined in P5.01.
P5.03 Unit of step time Setting range: 0.1 [0]
0: Second 1: MinuteNotes: This unit is only valid for defining the PLC operating time. The unit of Acc/Dec time in PLC operation is
still second.
P5.04 Operating Timing T1 Setting range: 0.0~3600 [10.0]
P5.05 Operating Timing T2 Setting range: 0.0~3600 [10.0]
P5.06 Operating Timing T3 Setting range: 0.0~3600 [10.0]
P5.07 Operating Timing T4 Setting range: 0.0~3600 [10.0]
P5.08 Operating Timing T5 Setting range: 0.0~3600 [10.0]
P5.09 Operating Timing T6 Setting range: 0.0~3600 [10.0]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
134
P5.10 Operating Timing T7 Setting range: 0.0~3600 [10.0]
P5.11 Operating Timing T8 Setting range: 0.0~3600 [10.0]
P5.12 Operating Timing T9 Setting range: 0.0~3600 [10.0]
P5.13 Operating Timing T10 Setting range: 0.0~3600 [10.0]
P5.14 Operating Timing T11 Setting range: 0.0~3600 [10.0]
P5.15 Operating Timing T12 Setting range: 0.0~3600 [10.0]
P5.16 Operating Timing T13 Setting range: 0.0~3600 [10.0]
P5.17 Operating Timing T14 Setting range: 0.0~3600 [10.0]
P5.18 Operating Timing T15 Setting range: 0.0~3600 [10.0]Notes: Define each stage of time during the programmable multi-stage speed operation, the run time varies from 0.0
to 3600 s (for example, if P5.03 is set to min, the unit is min), it is continuous and adjustable. When runningtime is set to 0, the speed of this stage is skipped, the inverter will run at the speed of next stage.
P5.19 Step T1 program operating setting Setting range: 1 F~4 r [1F]
P5.20 Step T2 program operating setting Setting range: 1 F~4 r [1F]
P5.21 Step T3 program operating setting Setting range: 1 F~4 r [1F]
P5.22 Step T4 program operating setting Setting range: 1 F~4 r [1F]
P5.23 Step T5 program operating setting Setting range: 1 F~4 r [1F]
P5.24 Step T6 program operating setting Setting range: 1 F~4 r [1F]
P5.25 Step T7 program operating setting Setting range: 1 F~4 r [1F]
P5.26 Step T8 program operating setting Setting range: 1 F~4 r [1F]
P5.27 Step T9 program operating setting Setting range: 1 F~4 r [1F]
P5.28 Step T10 program operating setting Setting range: 1 F~4 r [1F]
P5.29 Step T11 program operating setting Setting range: 1 F~4 r [1F]
P5.30 Step T12 program operating setting Setting range: 1 F~4 r [1F]
P5.31 Step T13 program operating setting Setting range: 1 F~4 r [1F]
P5.32 Step T14 program operating setting Setting range: 1 F~4 r [1F]
P5.33 Step T15 program operating setting Setting range: 1 F~4 r [1F]Notes: Specify the acceleration and deceleration time and the running direction of the inverter at each stage. There
are eight combinations with the meanings shown in Table 5-5-1.
Table 5-5-1 PLC program run setup descriptionSymbol Acc/Dec time Direction
1F Acc/Dec time 1 P0.18.P0.19 F: Forward
1r r: Reverse
2F Acc/Dec time 2 P2.28, P2.29 F: Forward
2r r: Reverse
3F Acc/Dec time 3 P2.30, P2.31 F: Forward
3r r: Reverse
4F Acc/Dec time 4 P2.32, P2.33 F: Forward
4r r: Reverse
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
135
P5.34 PLC record clear Setting range: 0.1 [0]
P5.35 Record of PLC steps Setting range: 0~15 [0]
P5.36Operating time of this step Setting range: 0.0~3600 [0.0]Notes: Record of PLC steps (P5.35) records the steps that the PLC currently operating at. Operating time of this step (P5.36) records the operating time of the step that the PLC currently operating at. When P5.34 is set to 1, clear stages of program running record P5.35, time when program runs through the
stage P5.36, the function code restores to 0 after clearing.
Tips:
You can start, pause, and reset of PLC operating by setting external terminal function, which is defined inGroup 3.
5.7 Cut-to-length Function and Wobble Frequency Operating (Group P6)P6.00 Set length Setting range: Max (0.000, -P6.06) ~65.53 m [0.000m]P6.01 Actual length Setting range: 0.000~65.53 m [0.000 m]P6.02 Length multiplying factor Setting range: 0.001~30.00 [1.000]P6.03 Length correction factor Setting range: 0.001~1.000 [1.000]P6.04 Circumference of gauging spindle Setting range: 0.01~100.0 cm [10.00 cm]P6.05 Deceleration point Setting range: 50~100 % [90%]P6.06 Amount of deviation Setting range: Max (-200.0, -P6.00) ~200.0 mm [0 mm]Notes: These function codes are used to implement Cut-to-length stop function. The inverter inputs count pulse from terminals (35R5GB and above models: X5 or X6 is defined as function
81, or X5 is defined as 81, X6 is defined as 82; 3004GB and below models: X4 or X5 is defined as function81, or X4 is defined as 81, X5 is defined as 82 ), the calculated length is obtained by measuring pulse numberper revolution (built-in PG: P2.44 / expanded PG: P2.42) and circumference (P6.04).
Calculated length = number of pulses counted ÷ number of pulses per revolution × circumference of gaugingspindle. The calculated length is corrected through length multiplying factor (P6. 02) and length correctionfactor (P6.03), and then the actual length is obtained.
Actual length = calculated length × length multiplying factor ÷ length correction factor The running frequency in Cut-to-length operation mode is set by P0.02, when the actual length (P6.01) is less
than and close to the set length (P6.00), the inverter will slow down automatically and run at the lower limitfrequency. When the actual length (P6.01) ≥ the set length (P6.00), the running frequency of the inverter is 0,the inverter stops after the stop command is given (stop at stop mode). Before running again, the actual length(P6.01) should be cleared, or the set length should be modified so that it is greater than the actual length,otherwise the inverter cannot be started, as shown in Fig. 5-6-1.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
136
Time(S)
Operation Freq.(Hz)
Run command
Time(S)
Actual Length
Preset length
Actual Lengthclearing Command
Operation according to inverter's preset
Dec time
Figure. 5-6-1 Fixed length control diagram 1
The time when the inverter slows down can be adjusted by setting the deceleration point. When the motorinertia is greater, the deceleration point can be appropriately reduced to make the motor run slowly inadvance;
While it can also be adjusted by setting the sliding frequency (P0.15 lower limit frequency) and the amount ofdeviation (P6.06). When the motor has overshoot, set P6.06 to a negative value; when a negative value isunreachable, set it to a positive value. Suppose that a motor has overshoot, the run procedure is as shown inFig. 5-6-2 after setting relevant parameters:
Figure. 5-6-2 Fixed length control diagram 2
Tips:
The actual length can be cleared by multi-function input terminal (Define terminal Xi as No.52 function). The actuallength will be calculated only after this terminal is disconnected.Actual length (setting of P6.01) will be saved automatically when the power is off. If the operation frequency isgreater than frequency upper limit and no pulse is input after the running time is longer than 30 seconds, the inverterreports pulse coder fault (dE) when actual length is 0.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
137
If P6.00 is set to 0, function of stop at fixed length is disabled, but the calculated length is still effective.The setting value must increase 200.0mm when P6.06 is modified by MODBUS communication. The correspondingrelation between communication value and actual used value (which can be displayed on the keypad) is as follows:Reality used value (displayed on the keypad)) = Communication setting – 200.0mm
P6.07 Wobble frequency operation restart mode Setting range: 0.1 [0]0: Start according to the state beforestoppingstopping 1: Re-start
Time(S)
Operation Freq.(Hz)
Central Freq.
Preset Freq.
Run command
Stop command
Fig. 5-6-3 Wobble frequency startup: Run in the state prior to stoppingstopping
Time(S)
Operation Freq.(Hz)
Central Freq.
Preset Freq.
Run command
Stop command
Fig. 5-6-4 Wobble frequency startup: Restart
P6.08 Save wobble frequency operatingparameters
Setting range: 0.1 [0]
0: not save 1: saveNotes: Not save: The inverter does not save the wobble frequency operating parameters when power is off and
restart when power is on. Save: The inverter will save the wobble-frequency operation parameters such as the operating frequency, and
operating direction (UP/DOWN) when power is off. The inverter will restart as the mode defined by P6.07when power is on.
P6.09 Preset of wobble frequencySetting range:35R5GB and above: 0.00~400.0Hz [0.00 Hz]3004GBand below: 0.00~650.0Hz [0.00 Hz]
P6.10 Holding time before wobble frequency Setting range: 0.0~3600s [0.0s]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
138
operatingP6.11 amplitude of oscillation Setting range: 0.0 ~ 50 % (relative to P 0.02) [0.0 %]P6.12 step frequency Setting range: 0.0 ~ fifty % (relative to P6.11) [0.0 %]P6.13 step time Setting range: 5~50ms [5ms]P6.14 Wobble frequency cycle Setting range: 0.1~999.9s [10.0s]P6.15 Swing ratio Setting range: 0.1~10.0 [1.0]
Notes: P6.09 is used to define the operating frequency before entering wobble frequency operation mode. P6.10 is used to define the time when the inverter operates at wobble-preset frequency. P6.11 is used to define the range of wobble operating frequency. The actual value is P0.02×P6.11.
P6.14 is used to define a cycle of wobble frequency operation including rising and falling processes. P6.15.is used to define the swing ratio = rise time / fall time.
P6.16 Random wobble selection Setting range: 0.1 [0]
P6.17 MAX ratio of random wobble Setting range: 0.1~10 [10]
P6.18 MIN ratio of random wobble Setting range: 0.1~10 [0.1]Notes: P6.16 is used to select a fixed wobble ratio value defined by P6.15 or a random value between P6.18~P6.17. Wobble frequency inputs have 2 ways:
Automatic input: If P0.03 is set to 12, and then the frequency will be automatically input during running.Manual input: If P0.03 is not set to 12, the inverter runs in other ways first, when wobble frequency terminalinputs, perform wobble frequency in manual input mode. Difference: Compared with automatic input, manualinput eliminates the process of running at preset frequency.
General conditions of wobble frequency operation: step up to preset wobble frequency (P6.09) according tothe default acceleration time, wait for a period of time (P6.10), and run to center frequency of wobblefrequency according to the default acceleration and deceleration time, run in circles according to the presetwobble frequency amplitude value (P6.11), step frequency (P6.12), step time (P6.13), wobble frequency cycle(P6.14) and swing ratio (P6.15), then slow down according to the default deceleration time after receiving thestop command.
When the set frequency is the combination of frequency setting source 1 + frequency setting source 2 , thecenter frequency is P0.02 + frequency setting source 2; when the set frequency is not the above combinations,the center frequency is the value of P0.02. General run procedure at wobble frequency is shown in Fig. 5-6-5.
Figure. 5-6-5 Wobble frequency start: Restart
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
139
5.8 PID Control (Group P7)P7.00 Source given 1 Setting range: 0~6 [0]P7.01 Source given 2 Setting range: 0~6 [0]0: PID digital given 1: Terminal AI12: Terminal AI2 3: Terminal AI3 (Reserved for 3004GB and the below)4: Pluse input 5: Serial communication6: Line speed(reserve)P7.02 Setting Quantity Combination Setting range: 0~7 [0]0: PID given source 1 1: PID given source 22: Min (PID given source 1, PID given source 2) 3: Max (PID given source 1,PID given source 2)4: PID given source 1+PID given source 2 5: PID given source 1-PID given source 26: PID given source 1*PID given source 2 7: PID given source 1/PID given source 2
Notes: It is used to determine the PID giving quantity input manner and passage. It can either be the digital quantity
setting (0 or 5), or the Analog setting (1, 2, 3, 4). The digital quantity setting is more precise and stable. TheAnalog can set the input curve via P4 group.
Notes: when the digital giving 0: PID is selected as the given source, there can be two sources, i.e. the analogPID digital givingP7.06 and the speed PID giving P7.08. When the feedback quantity is the speed signal, it isthe speed PID mode and P7.08 is the PID digital giving. When the feedback quantity is other signals, it is theanalog PID mode and P7.06 is the PID digital giving.
When the given source is AI1, AI2 and AI3, dialing is required to set the voltage or current signal to be input,which is illustrated in the basic operation wiring connection of Figure 2-41, 2-42, 2-43 and 2-44.
When the given source is the serial communications setting, setting is carried out by the upper computerthrough RS485 serial communications. If it is the analog PID, setting should be carried out according to therange percentage. If it is rotating speed PID, setting should be carried out based on the percentagecorresponding to the maximum rotating speed.
P7.03 PID feedback source 1 Setting range: 0~5 [0]
P7.04 PID feedback source 2 Setting range: 0~5 [0]0: Built-in PG or single phase speed measurement input ( P7.03 ) extended PG card speed input (P7.04)
1: Terminal AI1 2: Terminal AI2
3: Terminal AI3 (Reserved for 3004GB andthe below)
4: Pulse input
5: Serial communication
P7.05 Feedback quantity combination Setting range: 0~5 [0]
0: PID feedback source 1 1: PID feedback source 2
2: Min (PID feedback source 1, PID feedbacksource 2)
3: Max (PID feedback source 1, PID feedback source 2)
4: PID feedback source 1+PID feedbacksource 2
5: PID feedback source 1-PID feedback source 2
Explanation: It is used to determine the PID feedback input mode and channel. 0: represents to choose the rotation speed
PID. When the given is the Analog, the given speed is converted according to maximum rotation speed (therotational speed corresponding to maximum frequency) corresponding to the full scale. Others: represent toselect the analog PID.
AI1, AI2, AI3 terminal, serial communication: note the same to the quantitative selection. PG or single phase speed input: use speed PID control of pulse encoder PG. X5 or X6 must be configured as
speed measurement
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
140
P7.06 Analog PID Digital Giving Setting Range: -P7.07~P7.07 [0.0]P7.07 Analog PID Given Range Setting Range: MAX (1.0, |P7.06|) ~1000.0 [100.0]
Notes: When analog feedback is adopted, digital setting of the keypad giving quantity can be realized. The value is
the actual physical quantity and should match with the range. Setting and feedback quantity of the analog PID should take this as the benchmark and should be consistent
with the actual quantity.
P7.08 Speed PID Digital Setting Setting range: 0~24000rpm [0rpm]
Notes: When PG impulse feedback is adopted, the given value of rotating speed will be set via the keypad. When the
speed PID given range is over 10000, it will be indicated by “1000.”.P7.09 PID Proportional Gain1 Setting Range:0.1~30 [12]P7.10 PID Integration Time 1 Setting Range:0.00~100.0s [0.60s]P7.11 PID Differential Time1 Setting Range:0.00~1.00s [0.00s]P7.12 Switching Frequency1 Setting Range:0.00~switching frequency 2 [5.00Hz]P7.13 PID Proportional Gain2 Setting Range:0.1~30 [6]P7.14 PID Integration Time 2 Setting Range:0.00~100.0s [1.00s]P7.15 PID Differential Time2 Setting Range:0.00~1.00s [0.00s]
P7.16 Switching Frequency 2 Setting Range: switching frequency1~max. frequency[20.00Hz]
Notes: Proportional gain is the parameter determining the response degree of proportional action to deviation. When
a large value is taken for the proportional gain, the system will act sensitively and the response will beaccelerated. However, if the value is a little larger, the oscillation times will be increased and the adjustmenttime will be extended; if it is too large, the system will tend to be unstable; when it is too small, the systemwill act slowly and the response will be delayed.
The integration time is used to determine the integration action effect. When the integration time is long, theresponse will be slow. In addition, the control ability for the external disturbance will be weaker. When theintegration time is short, the integration action will be strong, the steady-errors will be eliminated, the systemcontrol precision will be promoted, and the response speed will be quick. If the integration time is too short,oscillation will occur and the system stability will be reduced.
The differential time determines the differential action effect. When the differential time is long, oscillationcaused by the P action in the case of deviation will be attenuated quickly and the adjustment time will beshort. However, if the differential time is too long, oscillation will be caused on the contrary. When thedifferential time is short, the attenuation action will be small and the adjustment time will be longer in thecase of deviation. The adjustment time can only be reduced when the differential time is appropriate.
P7.17 Selection of Differential Target Setting Range: 0, 1 [0]1: Feedback Differentiation 2: Deviation DifferentiationP7.18 PID Integral Limit Setting Range: 0.0~100.0% [20.0%]P7.19 PID Differential Limit Setting Range:0.0~100.0% [5.0%]P7.20 PID Output Limit Setting Range: 0.0~100.0% [100.0%]
Notes: The above limits are all based on the 100% maximum output frequency.
P7.21 Dormancy delay time Setting range: 0.00~25.00s [0.00s]Notes: PID-controlled Frequency Command Output Delay Time Setting
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
141
P7.22 Dormancy threshold Setting range: 0.0~999.9 [0.0]
Explanation: If the residual between feed and feedback value is smaller than residual margin, PID regulation will stop and
the PID output maintain constant. As shown in Figure. 5-7-1. Setting this parameter correctly is helpful to balance the system output accuracy and stability. The residual
margin reduces the regulation accuracy of the system, but improves the system stability, to avoid unnecessaryfluctuations of output.
In the case of analog PID, the error margin sets P7.22 as the absolute value of physical quantity, which shouldmatch with the range. In the case of PID, the error margin sets P7.22 as the rotating speed. It is showed inFigure 5-7-1:
Time
Time
Reference
Feedback Residual margin
Opereation Freq.
Figure. 5-7-1 Residual margin diagram
P7.23 PID Adjustment Characteristic Setting range: 0.1 [0]0: Positive Action 1: Negative Action
Explanation: Positive: When the PID output increases, the output frequency will increase and the controlled physical value
will increase, such as waterworks. Negative: When the PID output increases, the output frequency will increase, but the controlled physical
value will decrease, such as refrigeration system.
P7.24 Integral Adjustment Selection Setting range: 0.1 [0]0: When the frequency reaches the upper or lower limit, the integral adjustment will be stopped.1: When the frequency reaches the upper or lower limit, the integral adjustment will be continued.
Tips:
0 is suggested for the system requiring the rapid response. When the frequency reaches the upper or lower limit, theintegral adjustment will be stopped.
P7.25 Sleep Initiation Setting range: 0.1 [0]0: Non-initiation 1: Initiation
Tips:
In the case of rotating speed PID, there is not the function of sleep.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
142
P7.26 Sleep Delay Setting range: 0~999s [120s]P7.27 Sleep Threshold Setting range: 0~Frequency upper limit [20.00Hz]P7.28 Wakeup Threshold Setting range: 0.0~999.9 [3.0]
Notes: The function is used to stop the variable pump (all auxiliary pumps are stopped) when the flow is zero. In this
case, if the frequency of the variable pump is lower than the “sleep threshold parameter”, delay will beinitiated.
If the frequency is still lower than the threshold after the delay, the variable pump will stop. Thus, the wholeequipment will be in the state of “sleep”.
The pressure feedback should be reduced to the “wakeup” threshold to switch to the “wakeup” state. Then,the variable pump will be started (as showed in Figure 5-7-3). The wakeup threshold setting rangecorresponds to the analog PID feedback percentage.
t
t
休眠阀值
PI反馈
唤醒阀值
电机频率
延时时间
Figure 5-7-3 Sleep & Wakeup
5.9 Vector control mode(Group P8)P8.00 Pre-excitation current compensationquantity Setting range: 0.0~500.0% [100.0%]
Explanation:The 100.0% is corresponding to motor no-load current. The action time is set in the P1.04. The upper limit is 80% ofthe rated current or small value of the motor rated current.
P8.01 Speed loop proportional gain 1 Setting range: 0.1~30.0 [10.0]P8.02 Speed loop integral time 1 Setting range: 0.001~10.000s [0.200s]P8.03 Switching frequency 1 Setting range: 0.00Hz~Switching frequency 2 [5.00HZ]P8.04 Speed loop proportional gain 2 Setting range: 0.1~30.0 [10.0]P8.05 Speed loop integral time 2 Setting range: 0.001~10.000s [0.600s]
P8.06 Switching frequency 2 Setting range: Switching frequency 1~Maximum frequency[10.00Hz]
Explanation: The P8.01 and P8.02 is PI adjustment parameters when the operation frequency is less than the switching
frequency 1 (P8.03). P8.04 and P8.05 is PI adjustment parameters when the operation frequency is greaterthan the switching frequency 2 (P8.06). PI parameter at the switching frequency 1 and the switchingfrequency 2 frequency segment is linear with switching of the two group of PI parameters, as shown inFigure 5-8-1.
Delay Time
Sleep Threshold
Motor Frequency
Wakeup Threshold
PI Feedback
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
143
频率Hz
PI参数
P8.01、P8.02
P8.04、P8.05
P8.03 P8.06
Figure 5-8-1 PI parameters schematic diagram
You can adjust the speed dynamic response characteristics of vector control by setting the speed regulatorproportional coefficient and integral time. Increase the proportion gain, reduce the integration time canaccelerate loop dynamic response of the speed. If proportional gain is too large or integral time is too small,it may make the system oscillation.
The proposed regulation method: If the factory parameters cannot meet the requirements, then adjust basedon the factory value parameters: first increase the proportion gain, guarantee system not oscillation; thenreduce integration time, let the system has fast response, small overshoot.
Tips:
If the PI parameter is not set appropriately, it may lead to speed overshoot too big. Even it producesovervoltage failure when the overshoot falls.
P8.07 Speed loop filtering time Setting range: 0.000s~0.100s [0.030s]Explanation: In the vector control mode, the output of the speed loop regulator is torque current command. The
parameters are used for the torque command filter. The parameters require no adjustment in general. Whenthe speed fluctuation is big, it may appropriately increase the filtering time. If the motor oscillation, itshould appropriately reduce the parameter.
If the speed loop filter time constant is small, the frequency inverter output torque may change greatly, butthe response is fast.
P8.08 Current loop proportional gain Setting range: 0.1~9.9[1.0]P8.09 Current loop integral time Setting range: 0.001~1.000s [0.100]
Explanation: The vector control will control the motor output current and track the current command value. Here, set
current control proportional and integral gain. Usually, you do not need change the factory value. When thecoil inductance is large, you can increase the P gain. When the coil inductance is small, you can reduce the Pgain. If I gain is set too large, it will cause current oscillation.
P8.10 Torque control mode Setting range: 0~2 [0]0: Operation according to the speed controlmode 1: Operation according to the torque control mode
2: Operation according to the torque motormode
Explanation: When the setting is 0, the frequency inverter outputs according to the setting frequency. The output torque
matches with the load torque automatically, but the output torque is limited by the torque upper limit. Whenthe load torque is larger than the setting torque upper limit, the frequency inverter output torque is limited.The output frequency is different from the setting frequency.
PI parameter
Frequency HZ
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
144
When the setting is 1, frequency inverter outputs according to the setting torque. At this time, the outputfrequency automatically matches with the load speed, but limited by the Upper limit frequency limit. Whenthe load speed is greater than the upper limit frequency, the frequency inverter output frequency is limited.The output torque is different from the setting torque.
When in torque control, torque command is the torque limit, which is set by the torque upper limit source.You can switch through multi function input terminal torque and speed mode. When in torque control, thefrequency inverter output automatic tracking load speed changes, but the output frequency change speed isinfluenced by the setting acceleration and deceleration time. If it needs accelerate tracking speed, youshould shorten deceleration time. When the setting torque of the frequency inverter is greater than the loadtorque, the frequency inverter output frequency will rise. When the frequency inverter output frequencyreaches the upper limit frequency, frequency inverter will be operated at upper limit frequency. When thesetting torque of the frequency inverter is less than the load torque, the frequency inverter output frequencywill decrease, but not limited by the lower limiting frequency limit.
When the setting is 2, operates according to the torque motor mode. The main feature of the torque motor issoft mechanical property. It can be rotor-blocking. When the load torque increases, it can automaticallyreduce the speed.
P8.11 Torque upper limit source Setting range: 0~5 [0]0: Digital setting 1: AI12: AI2 3: AI3 (Reserved for 3004GB and the below)4: Pulse input 5: Serial communicationP8.12 Upper Limit of Driving Torque Setting range: 0.0%~200.0% [160%]P8.13 Upper Limit of Brake Torque Setting range: 0.0%~200.0% [160%]
Explanation: If the driving torque source is digitally set, what P8.12 AND p8.13 set will be the actual torque values.
P8.14 Command Slip Compensation Factor Setting range: 0.0%~200.0% [102.4%]Notes: With the vector control manner, the parameter makes compensation for the torque command. The output
current can be changed by revising the parameter. Generally, revision is not suggested.
P8.15 Torque acceleration time Setting range: 0.00~120.0s [0.5s]P8.16 Torque deceleration time Setting range: 0.00~120.0s [0.5s]
Explanation: Set the torque acceleration and deceleration time in torque mode. This function is invalid in the speed mode. The time that torque from 0 to rated torque is torque acceleration time. The time from rated torque to 0 is
torque deceleration time
P8.17 Driving slip compensation gain Setting range: : 50.0%~200.0% [130.0%]Notes:
For the speed-sensor-free vector control, if the load operation is unstable at the low speed, the parameter canbe increased appropriately.
P8.18 Brake slip compensation gain Setting range: : 50.0%~200.0% [117.0%]Notes:
For the speed-sensor-free vector control, the parameter is used to adjust the stable-speed precision of motor: ifthe speed is low when the motor is loaded, the parameter should be increased; if the speed is high, theparameter should be reduced.
P8.19 Zero servo function enable(reserve) Setting range:
0: Zero servo function prohibited 1: Zero servo function permitted [0]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
145
P8.20 Zero servo initial frequency(reserve) Setting range: 0.00~10.00Hz [0.30Hz]
P8.21 Zero servo gain (reserve) Setting range:1. 0~99.99(G5) [1.00]P8.22Zero servo tolerance (reserve) Setting range: 0~16383 [10]
Notes:Parameters related to zero-servo are reserved temporarily.
P8.23 Zero-speed Torque Boosting Setting range: 0.0~50.0% [0.0%]P8.24 Zero-speed Threshold Setting range: 0~20% [5%]
Notes: P8.23 zero-speed torque boosting is to provide the additional output torque at the startup, so the motor can
overcome the static friction and start smoothly when the set torque is small. The zero-speed threshold setting range corresponds to the 0~20% maximum output frequency.
P8.25 Brake Torque Setting Source Setting Range: 0~5 [0]0: consistent with the final setting value of
driving torque calculated with P8.11 1: AI1
2: AI2 3: AI3 (3004GB and the below are reserved)4: Impulse Input 5: Serial Communications
P8.26 High-speed Torque Make-up Gain Setting range: 40.0~160.0% [0.0%]P8.27 High-speed Torque Make-up Base Setting range: 0~1 [0]0: Make-up based on the operation frequency 1: Make-up based on the linear speed (Reserved)
Notes: As the operation speed increases, the mechanical system will consume more and more torque, and the
high-speed torque is to make up for the torque consumed by the mechanical system to keep basicallyunchanged the torque gained by the effective load.
What P8.26 sets is the maximum make-up and 100.0% corresponds to the rating output torque of motor.When the make-up base is “make-up based on the operation frequency”, the relationship between the torquemake-up and the present operation frequency is showed in Figure 5-8-2:
转矩补偿量
最大补偿量(P8.26)
运行频率(Hz)最大输出频率0
Figure 5-8-2 Relationship between the High-speed Torque Make-up and the Output Frequency
P8.28 Pre-excitation Time Setting Range: 0.00~120.0s [0.5s]Notes: The function of pre-excitation is used to establish the magnetic field before the asynchronous motor starts.
The parameter sets the duration time of this process.
Maximum OutputFrequency
Operation Frequency (Hz)
MaximumMake-up(P8.26)
Torque Make-up
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
146
5.10 V/F Control (Group P9)P9.00 V/F curves setting Setting range: 0~4 [0]
0: Constant Torque Characteristic Curve 0 1: Reduction Torque Characteristic Curve 1 (2.0)
2: Reduction Torque Characteristic Curve 2(1.5) 3: Reduction Torque Characteristic Curve 1 3 (1.2)
P9.01 V/F frequency value F1 Setting range: 0.0~P9.03 [10.00Hz]
P9.02 V/F voltage value V1 Setting range: 0~100.0% [20.0%]
P9.03V/F frequency value F2 Setting range: P9.01~P9.05 [25.00Hz]
P9.04 V/F voltage value V2 Setting range: 0~100.0% [50.0%]
P9.05 V/F frequency value F3 Setting range: P9.03~P0.09 [40.00Hz]
P9.06 V/F voltage value V3 Setting range: 0~100.0% [80.0%]
Notes: This group of function codes define the flexible V/F setting manner of the series frequency inverter to satisfy
the different load characteristic needs.
Figure 5-9-1 Torque-reducing curve
When 4 is selected for P9.00, the user can self-define the V/F curve through P9.01~P9.06. As showed inFigure 5-9-2, the V/F curve is defined with the four-point broken line to be adapted for the special loadcharacteristics. Notes: V1<V2<V3. In the case of low frequency, if the voltage is set to be too high, themotor may be overheated and even burned, and the frequency inverter may stall over current or beover-current protected.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
147
Figure. 5-9-2 V/F-curve defined by user
P9.07Torque boost mode Setting range: 0.0~30.0% [0.0%]
Notes: To make up for the low-frequency torque characteristic, certain boost compensation can be made for the
output voltage. When the function code is set as 0.0%, it is at the V/F control mode; when it is not set as 0,it is at the manual torque boost mode, as showed in Figure 5-9-3.
Output voltage
Output Freq.Basic operation frequencyCut-off Freq. for torque boost
Manualtorque boost
Max output voltage
Figure 5-9-3 Manual Torque Boost
Tips:
1. Wrong parameter setting can cause overheat or over-current protection of the motor.2. When the inverter drives synchronous motor, torque boost function is recommended to be used and V/F curveshould be adjusted according to the motor parameters.
P9.08 Cut-off point used for manual torqueboost Setting range: 0.00~50.00Hz [16.67 Hz]
Notes: This function defines the cutoff frequency for manual torque boost as showed in Figure 5-9-3. The cutoff
frequency is applicable to any V/F curve determined by P9.00.
P9.09 Gain of slip frequency compensation Setting range: 0.0~250.0% [0.0%]P9.10 Slip compensation time const Setting range: 0.01~2.55S [0.20S]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
148
Notes: The motor’s slip changes with the load torque, which results in the variance of motor speed. The inverter
output frequency can be adjusted automatically through slip compensation according to the load torque.Therefore, the electrical characteristics of the mechanical hardness are improved. As shown in Figure. 5-9-4.
Synchronous speed
n
T
Freq. aftercompensation Compensation Freq. f
Load torqueFigure. 5-9-4 Auto slip compensation diagram
In the case of rating torque, the slip compensation value is equal to compensation gain (P9.09) × rating slip(synchronous rotating speed – rating rotating speed);Motor-driving state: when the actual rotating speed is lower than the given speed, the compensation gain(P9.09) should be increased gradually;Power-generation state: when the actual rotating speed is higher than the given speed, the compensationgain (P9.09) should be increased gradually.
Tips:
The automatic slip compensation is related to the rating slip of motor. When the slip compensation function is used,the rating rotating speed of motor should be set correctly (PA.03 and PA.17).When the compensation gain is 0, the slip compensation will be ineffective.
P9.11 Energy saving control selection Setting range: 0.1 [0]
0: Effective Energy Conservation 1: Ineffective Energy ConservationNotes: The energy saving control parameters have been preset at the factory to the optimum values. It is not necessary
to adjust them under normal operation. If your motor characteristic has great difference from those ofstandard induction motors, refer to the following description to adjust the parameters.
P9.12 Energy saving gain coefficient Setting range: 0.00~655.3 [This value depends on the invertermodel]
Notes: In the energy conservation control mode, the energy conservation gain factor is used to calculate the voltage of
motor at its highest efficiency, which is used as the output voltage. The energy conservation factor P9.12 ispreset according to the value of standard motor before it leaves the factory. When the energy conservationgain factor increases, the output voltage will increase as well.
P9.13 Energy saving voltage lowerlimit(50Hz)
Setting range: 0~120% [50%]
P9.14 Energy saving voltage lowerlimit(5Hz)
Setting range: 0~25% [12%]
Notes: These parameters are used to set the lower limit of output voltage. If the voltage reference value calculated in
the energy saving mode is smaller than the energy saving voltage lower limit, the energy saving voltagelimit will be treated as the output voltage reference. To prevent the motor stalling at light loads, the energysaving voltage lower limit must be set. Set voltage limits at 5Hz and 50Hz; the setting value is obtained by
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
149
linear interpolation if the frequency is out range of 5Hz to 50Hz. The setting value is made by thepercentage of motor rated voltage.
Figure. 5-9-5 Energy saving voltage lower limit
In the energy saving control mode, the optimum voltage is calculated according to load power, and the voltageis supplied to the load. However, the set parameter may vary because of temperature variations or usingvarious manufacturers’ motors; therefore, the optimum voltage may not be supplied in some cases.Automatic fine-tuning control voltage maintains highly efficient operation.
P9.15 Time of average power Setting range: 1~200×(25ms) [5]
Notes: Preset the time of average power calculating in energy-saving control mode. The setting range of P9.15 is
25ms×(1~200).
P9.16 AVR function Setting range: 0~2 [2]0: Disabled 1: Enabled always2: Disabled in decelerating process
Notes: AVR means automatic output voltage regulation. When AVR function is invalid, the output voltage will
fluctuate when the power supply voltage fluctuates. When it is valid, the output voltage would not fluctuateas the input voltage. The output voltage will keep constant within the inverter output capacity.
P9.17 Over modulation enable Setting range: 0.1 [0]
0: ineffective; the overmodulation function isnot started 1: effective; the overmodulation function is started
Notes: When the over modulation function is enabled, the inverter voltage output capacity can be improved. However,
if the output voltage is too high, the output current harmonics will increase.
P9.18 Drop control (load distribution) Setting range: 0.00~10.00Hz [0.00Hz]Notes: The function is applicable on the occasion where many frequency inverters drive the same load. By setting the
function, power can be distributed evenly when many frequency inverters drive the same load. When the load current of a frequency inverter is >50%, the inverter will reduce the output frequency
appropriately automatically according to parameters set with the function to discharge certain load. Once theload current <=50%, stop reducing the frequency. If the load current is larger than 50% all the time, theoutput frequency should be reduced to the setting value of –P9.18.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
150
Tips:
When the slip compensation and the droop control cannot be effective concurrently, the slip compensation willenjoy the higher priority.
M M
Load
Inverter 1 Inverter 2
Belt
Figure 5-9-6 Droop Control Motor Characteristic
P9.19 Output voltage offset source Setting range: 0~5 [0]0: Digital setting 1: Terminal AI12: Terminal AI2 3: Terminal AI34: Pluse input 5: communication givenP9.20 Output voltage offset Setting range: 0.0%~100.0% [0.0%]
Notes: In the V/F separation mode, the actual output voltage is the set output voltage bias. (100% corresponding to
the maximum output voltage)
Tips:
The function is valid only in the V/F separate mode
P9.21 Oscillation Inhibition Factor Setting range:0~100 [0]Notes: In the case of no oscillation with the motor, please select the factor as 0. The factor will be increased
appropriately only when the motor oscillates obviously and cannot operate normally. The larger the factor is,the more obviously oscillation is inhibited. The method for the factor selection is to select the smallestfactor as possible in the premise that oscillation is inhibited effectively in case that no great effect is causedon the control performance.
5.11 Motor Parameters (Group PA)PA.00 Motor selection Setting range :0.1 [0]0: Use motor 1 1: Use motor 2
Explanation:
You can select to set the two motor parameters in this function code to switch motor 1 and motor 2.
Tips
After select the motor model, if the motor overload protection is externally-connected sensor, you must setPd.01 ~ Pd.04 correspondingly.
PA.01 Number of Poles for Motor 1 Setting range :2~56 [4]PA.02 Rating Power of Motor 1 Setting range : 0.4~999.9kW [Based on Motor Type]PA.03 Rating Rotating Speed of Motor 1 Setting range : 0~24000r/min [Based on Motor Type]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
151
PA.04 Rating Current of Motor 1 Setting range : 0.1~999.9A [Based on Motor Type]Notes: PA.01~PA.04 are used to set the parameters of the controlled motor 1. To ensure the control performance,
please do set relevant values correctly according to parameters on the motor nameplate. The motor power should match that of the inverter. Generally, the motor power is allowed to be 20% lower
than that of the inverter or 10% higher; otherwise, the control performance would not be ensured.
PA.05 No-load Current I0 of Motor 1 Setting range: 0.1~999.9A [Depending on model]PA.06 Stator Resistance R1of Motor 1 Setting range:0.001~65.000Ω [Depending on model]PA.07 Stator Leakage Inductance L1 of Motor1 Setting range:0.1~2000.0mH [Depending on model]
PA.08 Rotor Resistance R2 of Motor 1 Setting range:0.001~65.000Ω [Depending on model]PA.09 Mutual Inductive Impedance Lm ofMotor 1 Setting range:0.1~2000.0mH [Depending on model]
PA.10 Magnetic Saturation Coefficient 1ofMotor 1 Setting range:0.0%~100.0% [Depending on model]
PA.11 Magnetic Saturation Coefficient 2 ofMotor 1 Setting range:0.0%~100.0% [Depending on model]
PA.12 Magnetic Saturation Coefficient3 ofMotor 1 Setting range:0.0%~100.0% [Depending on model]
PA.13 Magnetic Saturation Coefficient 4 ofMotor 1 Setting range:0.0%~100.0% [Depending on model]
PA.14 Magnetic Saturation Coefficient 5 ofMotor 1 Setting range:0.0%~100.0% [Depending on model]
Notes:If the motor parameters are unknown, please refer to the PA.29 motor parameters setting instruction. If they areknown, please write them down for PA.05~PA.09 correspondingly.The motor magnetic saturation coefficients will be set automatically in the time of self-setting and doesn’t have to beset by users.
PA.15Motor 2 pole number Setting range:2~56 [4]PA.16Motor 2 rated power Setting range:0.4~999.9kW [Depending on model]PA.17Motor 2 rated speed Setting range:0~24000r/min [Depending on model]PA.18Motor 2 rated current Setting range:0.1~999.9A [Depending on model]PA.19Motor 2 no-load current I0 Setting range:0.1~999.9A [Depending on model]PA.20Motor 2 stator resistance R1 Setting range:0.001~65.000Ω [Depending on model]PA.21Motor 2 stator leakage inductance L1 Setting range:0.1~2000.0mH [Depending on model]PA.22Motor 2 rotor resistance R2 Setting range:0.001~65.000Ω [Depending on model]PA.23Motor 2 mutual inductive reactanceLm Setting range:0.1~2000.0mH [Depending on model]
PA.24 Motor 2 magnetic saturationcoefficient 1 Setting range:0.0%~100.0% [Depending on model]
PA.25 Motor 2 magnetic saturationcoefficient 2 Setting range:0.0%~100.0% [Depending on model]
PA.26 Motor 2 magnetic saturationcoefficient 3 Setting range:0.0%~100.0% [Depending on model]
PA.27 Motor 2 magnetic saturationcoefficient 4 Setting range:0.0%~100.0% [Depending on model]
PA.28 Motor 2 magnetic saturationcoefficient 5 Setting range:0.0%~100.0% [Depending on model]
Notes:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
152
The parameters setting of motor 2. The detailer settings are the same as motor 1. The settings are valid after thePA.00 is set to 2.
PA.29 Motor parameter setting Setting range: 0~2 [0]0: No operation 1: Static parameter setting2: Rotation parameter setting
Notes No operation 1: static parameter setting; it is applicable on occasions where a motor and load cannot be disconnected easily
and rotary setting is disabled. When the function code is set and able to RUN, the frequency converter will setthe function form PA.06~PA.08 / PA.20~PA.22 automatically.PA.05, PA.09 / PA.19 and PA.23 should be set manually according to the standard motor parameters.
2: Rotary parameter setting; to ensure the dynamic control performance of frequency converter, please selectthe rotary parameter setting. At setting, the motor should be disconnected from the load (no load). When thefunction code is set and is able to RUN, it means that automatic setting is enabled.
Tips:
1. Before the parameters setting, please enter the correct nameplate parameter of the controlled motor(PA.01 ~ PA.04 PA.15 ~ PA.18).
2. When rotation setting, you should let the motor off from the load. It is banned that setting with the load.3. Before parameter setting, please confirm the motor is in stoppingstopping state. Otherwise, it cannot be
normal.4. After the parameter setting process is completed (including abnormal end) , it is automatically set to 0.5. During the process of parameter setting, the operation panel will display “- At-”. If the parameter setting isunsuccessful, the operation panel will display “AtE”.
Notes:At the time of static setting, the motor no-load current calculation method and the motor mutual inductance
calculation method are showed in the following formulae. Among them, L is the motor leakage inductance, 0I is
the no-load current, mL is the mutual inductance, is the motor efficiency, I is the rating current of motor, U is
the rating voltage of motor, and f is the fundamental frequency of motor.
No load current: 20 1I I
Mutual inductance calculations m02 3 f
UL LI
The specific meanings of the above motor parameters are showed in Figure 5-10-1.
1U
1R 1jX
mR
mX
2jX
sR2
0I1I
2I
Figure 5-10-1 Stable-state Equivalent Circuit Diagram of the Asynchronous Motor
In Figure 5-10-1, R1, Xl, R2, X2, Xm and I0 represent the stator resistance, stator leakage inductive impedance,rotor resistance, rotor leakage inductive impedance, mutual inductive impedance and no-load current.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
153
5.12 MODBUS Communication (Group Pb)The series of frequency inverters can conduct the serial communication via the MODBUS communication protocoland the programmable logic controller (PLC). MODBUS consists of a controlling PLC and 1-31 frequency invertersof this series. The signal transmission between the controlling and the controlled is always started and done by thecontrolling, while the controlled responds to the signal.The controlling frequency inverter conducts the signal transmission with one controlled frequency inverter once. Thecontrolled frequency inverter will perform its function and respond to the controlling inverter after receiving thecommand sent by the controlling inverter. Communication Specification
Interface: RS-485 Synchronization Manner: half-duplex asynchronous Transmission Parameters:
Baud rate: Selectable from 1200, 2400, 4800, 9600, 19200, 38400 BPS (parameter Pb.00)Data length: fixed at 8 bitsParity: even parity/no parity/odd parity selectable (parameter Pb.02)Stop bit: fixed at 1 bitProtocol: In accordance with MODBUSMaximum number of units to be connected: 31 units
Data sent/received through communication: data sent/received through communication include the operationcommand, frequency giving, fault content, invert state and setting & reading of function parameters. Themonitoring content and the reading &writing function parameters can be read through starting up by default;
Pb.00 Baud rate selection Setting range:0~5 [3]0: 1200 bps 1: 2400 bps2: 4800 bps 3: 9600 bps4: 19200 bps 5: 38400 bps
Pb.01 Address of the Inverter Setting Range: 0~31 [1]Notes: The address of the inverter set cannot be the same with the addresses of other controlled devices connected to
the same transmission line.
Pb.02 Even-odd Check Selection Setting Range: 0~2 [0]0: Even Check2: No Check 1:Odd Check
Pb.03 Communication Timeout Check Time Setting Range: 0~100.0s [0.0s]
Notes: 0:there is no timeout check Non-0: there is the timeout check. The system will check the communication state at the interval of the Pb.03
setting value. If there is no normal data receive or sent, the system will report the external communicationfault (EF0) and stop the machine; the fault should be cleared manually;
Tips:
If only abnormal data are received during the timeout check, they will not be used as the base for being incommunication and fault will be reported;
Pb.04 Response delay time Setting range: 0~500ms [5ms]Notes: It refers to the time from inverter receiving the host PC command to returning response frame to it.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
154
Pb.05 MODBUS frequency reference unit Setting range: 0.1 [0]0: 0.01Hz 1: 0.1Hz
Notes: The frequency unit can be selected for the PLC frequency command. The output frequency resolution rate for this series of frequency inverters is 0.01Hz. When the frequency
command unit of the function code Pb.05 is selected as 0, i.e. 0.01Hz, the given frequency value it receiveswill be treated as 0.01Hz directly. If the unit is selected as 1:0.1Hz, it will be converted into 0.10Hz internallyautomatically. If the frequency command received is 01F4 (16 hexadecimal of 500), when Pb.05 selects 0, itwill be treated as 5.00Hz by the system; when Pb.05 selects 1, it will be converted into 50.0 (0) Hz by thesystem automatically.
Pb.06 Selection of MODBUS data storage Setting range: 0.1 [0]0: Not save to EEPROM 1: Directly save to EEPROM
Notes: This function code is used to select whether to save the MODBUS data to EEPROM or not. If pb.06 is set as 1,
parameters that modified by MODBUS communication will be saved to EEPROM directly. However, if Pb.06is set as 0, the modified parameters will not be saved to EEPROM, but stored in RAM and they will be lostwhen power is off. The other method to save the data to EEPROM is that write the MODBUS addresscorresponding to the modified parameter to 0x00FF, then the data will be saved to EEPROM which acts as the“ENTER “key to save the data.
Write or erase EEPROM frequently will reduce the life of EEPROM. Write parameter data and save the datato EEPROM frequently in communication mode is not allowed; for writing data frequently, you must modifyPb.06 as 0.
Pb.07 CCF6 Fault Handling Setting range:0.1 [0]0: Not generate fault and keep on running 1: Generate fault and stop
Notes:This function code is used to decide whether to generate communication fault or not. When the value is 1, ifcommunication fault occurs, the keypad will display CCF6 and the inverter stop as fault occurs; when thevalue is 0, it doesn't generate the fault and the inverter will keep on running.
5.13 Display Control (Group PC)PC.00 LCD Language selection Setting range: 0.1 [0]0: Chinese, display Chinese prompt in LCD screen; 1: English, display English prompt in LCD screen.
Notes:This function is only effective for the keypad equipped with LCD. The LED keypad only displays the segment codecharacters or figures.
PC.01 Output frequency (Hz) (Beforecompensation) Setting range: 0.1 [1]
PC.02 Output frequency (Hz) (Actual) Setting range: 0.1 [0]0: No display 1: Display
Notes: When PC.01 is set as 1, the output frequency before compensation will be displayed in the monitoring state,
and the indicator light will indicate the unit Hz; if it is set as 0, the output frequency before compensation andthe unit will not be displayed.
When PC.02 is set as 1, the actual output frequency will be displayed in the monitoring state, and the unit isHz; if it is set as 0, the target will not be displayed.
PC.03 Output current (A) Setting range: 0.1 [1]0: No display 1: Display
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
155
Notes: When PC.03 is set as 1, the output current will be displayed in the monitoring state and the unit is A. If it is
set as 0, the target will not be displayed.
PC.04 Frequency Setting (Hz Flickering) Setting Range: 0, 1 [1]0: non-displayed 1: displayed
Notes: PC.04 can be set as 1. The monitoring target can be selected by pressing the button. When the target is
selected, the unit is indicated as Hz and is flickering. If P0.03 is set as 1, it can be set via the numbers on thekeypad and can be adjusted with the number knob. The user can adjust the set frequency with the numberknob. If P0.17 is set as 0, the adjustment rate can be adjusted from 0.01Hz to 0.1Hz, even to the maximum of1Hz to realize the rapid increase or decrease of frequency by turning the knob continuously. Please refer toP0.17 for details.
PC.05 Rotate speed (r/min) Setting range: 0.1 [1]PC.06Reference speed (r/min flashes) Setting range: 0.1 [0]0: : No display 1: display
Notes: When PC.05 is set as 1, the operating rotating speed will be displayed in the monitoring state and the unit is
r/min. If it is set as 0, the target will not be displayed. When PC.06 is set as 1, the set rotating speed will be displayed in the monitoring state and the unit is r/min
and is flickering. If PC.06=1, when the user switches to PC.05 or PC.06 by pressing >>, the following will be displayed: if it is
the ordinary operation and P0.03 is set as 1 (set with the numbers on the keypad), the set rotating speed canbe adjusted on line and the corresponding frequency value will be saved to P0.02 after pressing ENTER; if itis the PID operation, and P7.00 is set as 0, P7.03 is set as 0:PG or single-phase speed-measuring input, thespeed PID giving can be adjusted on line and be saved in P7.08 after pressing ENTER; if P7.03 is not 0:PG orthe single-phase speed-measuring input, it cannot be adjusted. PC.06 will be displayed during the on-lineadjustment. After adjustment is over, the target before adjustment will be displayed.
PC.07 Linear speed (m/s) Setting range:: 0.1 [0]PC.08 Reference linear speed (m/s flashes) Setting range:: 0.1 [0]0: No display 1: Display
Notes: When PC.07 is set as 1, the operation linear speed will be displayed in the monitoring state and the unit is m/s
(the indicator light m/s is on). If it is set as 0, the target will not be displayed. When PC.08 is set as 1, the set linear speed will be displayed in the monitoring state and the unit is m/s (the
indicator light m/s is on and flickering) (the target cannot be adjusted on line).
PC.09 Output power Setting range: 0.1 [0]0: No display 1: Display
Notes: When PC.09 is set as 1, the output power (no unit is displayed) will be displayed in the monitoring state. If it
is set as 0, the target will not be displayed.
PC.10 Output torque (%) Setting range: 0.1 [0]0: No display 1: Display
Notes: If PC.10 is set to 1, output torque will be displayed with unit “%” in monitoring state. If PC.10 is set to 0,
output torque will not be displayed.
PC.11 Output voltage (V) Setting range: 0.1 [0]PC.12 Bus voltage (V) Setting range: 0.1 [0]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
156
0: No display 1: DisplayNotes: If PC.11 is set to 1, output voltage will be displayed in monitoring state, and the unit indicator “V” will be
lit up. If it is set to 0, output voltage will not be displayed. If PC.12 is set to 1, bus voltage will be displayed in monitoring state, and the unit indicator “V” will be lit
up. If it is set to 0, bus voltage will not be displayed.
PC.13 AI1 (V) Setting range: 0.1 [0]PC.14 AI2 (V) Setting range: 0.1 [0]PC.15 AI3 (V) (Reserved for 3004GB and thebelow) Setting range: 0.1 [0]
0: No display 1: DisplayNotes: If PC.13 is set to 1, analog input voltage AI1 will be displayed in monitoring state, and the unit indicator “V”
will be lit up . If it is set to 0, analog input voltage AI1 will not be displayed. If PC.14 is set to 1, analog input voltage AI2 will be displayed in monitoring state, and the unit indicator “V”
will be lit up. If it is set to 0, analog input voltage AI2 will not be displayed. If PC.15 is set to 1, analog input voltage AI3 will be displayed in monitoring state, and the unit indicator “V”
will be lit up . If it is set to 0, analog input voltage AI1 will not be displayed.
PC.16 Analog PID feedback (no unit) Setting range: 0.1 [0]PC.17 Analog PID feed (no unit) Setting range: 0.1 [0]0: No display 1: Display
Notes: Analog PID setting/feedback: the physical quantity percentage corresponding to the Analog × analog closed
loop range When PC.16 is set as 1, the analog PID feedback will be displayed in the monitoring state without the
indication unit. If it is set as 0, the target will not be displayed. When PC.17 is set as 1, the analog PID setting can be displayed in the monitoring state. When P7.00 is set as
0 and P7.08 is not as 0, the analog PID setting can be adjusted on lone by switching to PC.16 or PC.17 withthe shift key >> and will be saved in P7.06 after pressing ENTER. During the on-line adjustment, PC.17 willbe displayed. The target before adjustment will be displayed after adjustment is over.
PC.18 External counting value (no unit) Setting range: 0.1 [0]0: No display 1: Display
Notes: If PC.18 is set to 1, external count value will be displayed in monitoring state, and all unit indicators will be
off. If it is set to 0, external count value will not be displayed.
PC.19 Terminal status (no unit) Setting range: 0.1 [0]0: No display 1: Display
Notes: When PC.19 is set as 1, the terminal state will be displayed. If it is set as 0, the target will not be displayed. The terminal state information includes the state of the multifunctional terminals X1~X11, two-way open
collector output terminals D0, Y1, Y2, Y3, output relay 1 and output relay 2. The state of the functionterminals is indicated by ON/OFF of the specified segment of an LED digital tube. If the digital tube segmentis on, it indicates that the state of the corresponding terminal is the effective state; if it is off, it indicates thestate is the ineffective state. There are four constantly-on stroke segments with the digital tube to facilitateobservation. It is showed as in Figure 5-12-1:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
157
Figure 5-12-1 Terminal State Indication
PC.20 Actual length (m) Setting range: 0.1 [0]0: No display 1: Display
Notes: If PC.20 is set to 1, the actual length will be displayed in monitoring state, and all unit indicators will be off.
If it is set to 0, actual length will not be displayed.
PC.21 Power on display Setting range: 1~20 [1]Notes: PC.21 startup display selection: the function code is used to set the priority display parameters at startup. The
setting values 1~20 correspond to PC.01~PC.20 respectively. When the display control of the displayparameter set is 0 and not displayed, search backwards from the current value set (from the smallest numberto the largest and return to 1 when reaching 20) until the display control of non-0 appears and is displayed.
The priority display parameters at startup are only limited to the parameters of PC.01~PC.20 and are onlyvalid at startup. When there is a fault, warning or communication CALL displayed, the parameters will bedisplayed according to the original priority order and the current priority display will not act.
PC.22 Rotating speed display coefficient Setting range: 0.1~999.9% [100.0%]Notes: PC.22 (Rotating Speed display coefficient) is used to correct the bias of displayed rotating speed and it has no
influence on actual speed. Rotating Speed Set=Actual Rotating Speed Set ×PC.22 (PG) Rotating Speed Set=120×Running Frequency ÷ Motor Pole Number×PC.22 (Non-PG) Reference Rotating Speed=PID Reference Rotating Speed×PC.22 (PG)Reference Rotating Speed=120×Set
Frequency ÷ Motor Pole Number×PC.22 (Non-PG)PC.23 Linear Speed Coefficient Setting Range: 0.1~999.9% [100.0%]
Notes: PC.23 linear speed coefficient: It is used to revise the linear speed scale display error and has not effect on the
actual rotating speed. Linear speed = Running frequency × PC.23 (non PG) Linear speed = rotate speed × PC.23 (PG) Reference linear speed= reference frequency* PC.23 (non PG) Reference linear speed= reference speed × PC.23 (PG)
Tips:
Display Scope:Linear speed and Reference: 0.000~65.53m/s Output power 0~999.9kWOutput torque 0~300.0% Output voltage 0~999.9VBus voltage 0~1000V AI1/AI2 0.00~10.00VAI3 -10V~10V External counting value 0~65530
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
158
Actual length/Preset length 0.001~65.53m
5.14 Protection and Fault Parameters (Group Pd)Pd.00 Motor overload protection mode selection Setting range: 0~3 [1]0: Disabled1: Common motor (with low speed compensation)2: Variable frequency motor (without low speed compensation)
3: Sensor Protection (Immediate Over-threshold Protection)Notes: No Action
When 0 is selected, the frequency inverter has not overload protection of the lad motor, so it should beselected and used prudently;
Common Motor (Compensation at the Low Speed)As the fan of common motor is installed on the rotor shaft of motor and the fan rotates slowly in the case oflow speed, the heat radiation will get poor and the corresponding electronic thermal protection value will beadjusted appropriately, i.e. the overload protection threshold value of motor whose operation frequency islower than 30Hz is reduced.
Variable-frequency Motor (No Compensation at the Low Speed)As the fan of the special variable-frequency motor is not installed on the rotor shaft, the fan heat radiationwill not be affected by the rotating speed and the protection value in the case of low-speed operation shouldnot be adjusted.
Sensor Protection (Immediate Over-threshold Protection)The protection function of the external thermal relay of motor is realized.The protection threshold values of motor 1 and motor 2 are set through Pd.01 and Pd.03;The sensor passage is set through Pd.02 and Pd.04.
Pd.01 Motor 1 protection threshold value Setting range: 0.0~10.0V [10.0V]Pd.02 Motor 1 protection sensor input channel Setting range: 0~4 [0]Pd.03 Motor 2 protection threshold value Setting range:0.0~10.0V [10.0V]Pd.04 Motor 2 protection sensor input channel Setting range: 0~4 [0]
0: Terminal AI1 1: Terminal AI22: Terminal AI3 (Reserved for 3004GB and the below) 3: Pluse input4: communication setting
Pd.05 Electro-thermal protective value Setting range: 20~110% [100%]Notes: In order to apply effective overload protection to different kinds of motors, the Max output current of the
inverter should be adjusted as shown in Figure.5-13-1.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
159
1 min
Time
Output current100% 200%
50% 100%
Motor overloadprotectivecoefficient
Figure. 5-13-1 Motor overload protection curve
Adjustment can be determined according to the following formula:
Rating Output Current of Frequency Inverter×100%
Allowed Max. Load Current
Among it, “Allowed Max. Load Current” is the rating current of motor generally.For the motor with the better heat resistance, the value can be increased by a little (e.g. 10%); for the motor with theweaker heat resistance, the value can be decreased by a little.
Tips:
When the rating current of motor doesn’t match with that of frequency inverter, the motor can be protectedeffectively by setting the value of Pd.05. When protection acts, PWM will be blocked and OL1 fault will bereported.
Pd.06 Pre-overload detection level Setting range: 20.0~200.0% [160.0%]Pd.07 Pd.07 Pre-overload detection time Setting range: 0.0~60.0s [60.0s]
Notes: The overload pre-alarm detection level (Pd.06) defines the current threshold of overload pre-alarm action. Its
set value corresponds to the percentage of the rating current of frequency inverter. The overload pre-alarm detection time (Pd.07) defines that the overload pre-alarm signal OLP2 will be given
out after the output current of frequency inverter keeps larger than the overload detection level (Pd.06) forcertain time continuously.
Overload pre-alarm state effective means that the working current of frequency inverter is over the overloaddetection level and its duration time is over the overload detection time.
ActionDetect time Detect time
Detect thresholdOutput current
EnabledTime
Time
Figure. 5-13-2 Overload pre-alarm function
Motor Overload Protective Coefficient Value =
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
160
Tips:
1. For setting of the overload pre-alarm detection level\detection time, it should be generally ensured that thepre-alarm occurs earlier than the overload protection action of frequency inverter.
2. Within the overload pre-alarm detection time, if the working current is less than the overload pre-alarmdetection level, the overload pre-alarm detection time inside the inverter will be reset.
Pd.08 Current amplitude limit Setting range:0~3 [1]
0: Invalid 1: Valid during Acceleration and deceleration, invalid inconstant speed Operation
2: Valid 3: Reduce the operation speed in the case of overloadPd.09 Current amplitude limiting level Setting range:80~180% [160%]
Notes: When the inverter is running at Acc/Dec or constant speed, there may be a sharp increase in the current,
because of the unmatched of acc time and motor inertia, or the mutation of load torque. In order to control theoutput current, when Pd.08 is set to 1 and 2 or 3, the inverter’s output frequency may be adjustedautomatically.
When it is set as 1 or 2 for acceleration or deceleration, if the output current value reaches the current limitaction level Pd.09, the output frequency of frequency inverter will not change until the current is restored tothe normal and the final control current will not be higher than the PD.09 value.
In the case of stable-speed operation, if Pd.08 is selected as 2, the current value will reach the current limitaction level Pd.09, the frequency inverter will reduce the output frequency according to the deceleration time4 and restore to the original working state after the current is reduced. If Pd.08 is selected as 1, the outputfrequency of frequency inverter will not change.
If Pd.08 is selected as 3, the current value will reach the current limit action level Pd.09 and last for the timeset by Pd.20, then the frequency inverter will reduce the output frequency according to the deceleration time 4and restore to the original working state after the current is reduced.
During the process of deceleration, if the frequency inverter is at the state of current limit for over 1min, theOL2 overload alarm of frequency inverter will be given out and the motor will stop freely; or by pressing thebutton of STOP/RESET twice (at the interval not less than 2s), the OL2 overload alarm of frequency inverterwill be given out and the motor will stop freely.
Output Freq.(Hz)
0
Time(s)Output current %
0
Time(s)AccelerationFigure. 5-13-3 Acceleration
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
161
Output Freq.(Hz)
0
Time(s)Output Current(%)
0Time(s)
Acc/Dec 4
Figure. 5-13-4 constant speed Operation
Pd.10 Over-voltage at stallfunction selection Setting range: 0.1 [1]
0: Disabled (The proposed option, when braking resistor is mounted) 1: EnabledPd.11 Over-voltage point atstall Setting Range: 120.0~150.0% busbar voltage
Notes: The busbar voltage is approximately equal to the input voltage×1.414. For the motor type with the input
voltage of 220V, the default value of Pd.11 is 120% (about 373V); for the motor type with the input voltageof 380V, the default value of Pd.11 is 140% (about 752V).
The dynamic braking action voltage point is also related to the parameter. For the motor type with the inputvoltage of 380V, the dynamic braking action voltage is 52V lower than the overvoltage stalling point (i.e. thedefault action point is 700V). For the motor type with the input voltage of 220V, it is 23V lower (i.e. thedefault action point is 350V).
During the decelerating operation of frequency inverter, the actual decrease rate of the motor rotating speedmay be lower than that of the output frequency for frequency inverter. In this case, the motor is at the state ofpower generation and will feed energy to the frequency inverter, which will cause the DC busbar voltage offrequency inverter to rise. If corresponding measures are not taken, the overvoltage fault will occur.
If Pd.10=1 is effective, when the DC busbar voltage rises to a certain value (≥Pd.11) during deceleration,deceleration will be paused and the frequency inverter will keep the output frequency unchanged.Deceleration will not be started again until the DC busbar voltage is reduced.
When the frequency inverter is at the overvoltage stalling state for over 1min continuously, the Ouovervoltage alarm will be reported and the motor will stop freely; or by pressing the button STOP/RESETand then pressing the button STOP/RESET twice (at the interval not less than 2s), the frequency inverter willreport the overvoltage and the motor will stop freely.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
162
Output Freq.(Hz)
0Time(s)
Bus voltage(%)
0Time(s)Deceleration
Figure. 5-13-5 Deceleration
Pd.12 Input Phase Loss Detection Benchmark Setting range:1~100% [100%]Pd.13 Input Phase Detection Time Setting range:2~255s [10s]
Notes: With this function, the input phase loss or the serious imbalance of the input three phases can be detected to
protect the frequency inverter. If the input phase loss protection is too sensitive, the detection benchmarkPd.12 and the detection time Pd.13can be increased appropriately. If it is not so sensitive, the detectionbenchmark Pd.12 and the detection timePd.13 can be reduced.
Pd.14 Output Phase Loss Detection Benchmark Setting Range: 0~100% [0%]Pd.15 Output Phase Detection Time Setting Range: 0.0~2.0s [0.2s]
Notes: With this function, the output phase loss or the serious imbalance of the output three phases can be detected to
protect the frequency inverter and motor. If the output phase loss protection is too sensitive, the detectionbenchmark and the detection time can be increased appropriately. If it is not so sensitive, the detectionbenchmark and the detection time can be reduced.
Pd.16 Enabling keypad keys UP/DN Setting range: 0.1 [0]0: Invalid 1: Enabled
Notes: In the case the digital encoder is damaged, the function can be set as 1 to enable the keypad key UP/DN
manner. The keypad key JOG acts as the UP key and the direction key acts as the DN key or via the combination key: the function can be enable by pressing the keys Shift +JOG for 5s (this manner
can only be set and effective when the function group is displayed, and will not be saved after power down)
Pd.16 Enabling keypad keys UP/DN Setting range: 0.1 [0]0: Invalid 1: Enabled
Notes: With this function, it can be set whether the alarm will be displayed in the case of abnormal analog signal;
when it is set as 1, if the analog signal 1/2/3 is abnormal, the alarm AE1/AE2/AE3 will be displayed; when itis set as 0, the alarm will not be displayed.
Pd.18 Automatic Resetting Times Setting Range: 0~10 [0]Pd.19 Resetting Interval Setting Range: 2.0~20.0s [5.0s]Pd.20 Confirmation Time before OvercurrentDeceleration Setting Range: 0~200ms [50ms]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
163
Notes: Only three faults including OC, Ou and GF can be reset automatically. The three faults in operation can be reset automatically according to the set times Pd.18 and interval Pd.19.
During the resetting interval, output is blocked and the inverter operates with zero frequency. The inverterwill operate with the startup manner after automatic resetting is finished. When Pd.18 is set as 0, it means thatthere is not the function of automatic resetting, and protection should be done immediately.
Tips:
Be careful in using auto-reset function, otherwise human injury or material loss may occur.SC fault need 10 seconds waiting time for manual reset.
Pd.21Operation protection when power on Setting range: 0.1 [0]
0: No protection 1: ProtectionPd.22Operation protection after operation commandgiven mode switching Setting range: 0.1 [0]
0: Continuous operation 1: Stopping, restart to operate when receive newoperation command
Explanation: When Pd.21 is set to 1, it is the power-on operation protection, namely direct power when the operation
commands are valid. Frequency inverter will be powered on protection, until receive operation commandagain, the frequency inverter will work.
When the Pd.22 command switches the operation protection setting to 1, when the frequency inverter is in astopping state, after run command given mode switching, frequency inverter will not immediately run untilreceive operation command again. When the frequency inverter is in an operation state, command switch, thefrequency inverter will slow down, until receive operation command.
Pd.23 Action selection when rotor blocked (reserve) Setting range: 0.1 [0]
0: No execute anti-blocking rotation action serials 1: Execute anti-blocking rotation action serialsPd.24 Rotor-blocking action trigger condition(reserve) Setting range: 0~3 [2]
0: Output current over triggering level 1: Control terminal close2: Output current over setting or control terminal close 3: Timing execute periodicallyPd.25 Stalling Action Triggering Level (Reserved) Setting range:100.0%~300.0% [200%]Pd.26 Stalling Action Triggering Period (Reserved) Setting range:0.00h~200.0h [0.00h]
Pd.27 Positive Step Frequency (Reserved) Setting range:0.00Hz~Frequency upper limit[0.00Hz]
Pd.28 Positive Step Duration (Reserved) Setting range:0.0s~1000s [0.0s]
Pd.29 Negative Step Frequency (Reserved) Setting range:0.00Hz~Frequency upper limit[0.00Hz]
Pd.30 Negative Step Duration (Reserved) Setting range:0.0s~1000s [0.0s]Pd.31 Interval between Positive Step and Negative
Step (Reserved) Setting range:0.0s~1000s [0.0s]
Pd.32 Step Action Repetition Times (Reserved) Setting range:0~100 [0]
Pd.33 Software Current-limiting Point Setting Range:100.0%~250.0%Pd.34 Hardware Current-limiting Enabled Setting Ranged:0,1 [1]0: Prohibited 1: Allowed
Notes: The software current-limiting point 100.0% corresponds to the rating current of frequency inverter. The hardware current-limiting point is fixed as 160.0% of the rating current of frequency inverter. The
specific value is related to the inverter type.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
164
Compared with the software current-limiting function, hardware current-limiting responds more quickly.Thus, it is suggested that hardware current-limiting function not be cancelled.
5.15 Running History Record (Group PE)
PE.00 Type of latest fault Setting range: Table 5-14-1 [NULL]PE.01 Output frequency at last fault Setting range: 0~Frequency upper limit [0.00Hz]PE.02 Reference frequency at last fault Setting range: 0~Frequency upper limit [0.00Hz]PE.03 Output current at last fault Setting range: 0~2 times of (rated current) [0.0A]PE.04 DC bus voltage at last fault Setting range: 0~1000V [0V]
Notes: If the frequency inverter fails during operation, the PWM output will be blocked immediately to enter the
fault protection state and the fault indicator light TRIP will be flickering. For working conditions during thetime of fault (e.g. output frequency, set frequency, output current, and DC busbar voltage, etc) and the faultcontent of recent three times can be found in the function code PE.01~PE.08. Instruction of fault types isshowed in Table 5-14-1:
Table 5-14-1 Instruction of Fault TypesFaultcode Description
Faultcode Fault categories
NULL No fault Uu1 Bus Under voltage
Uu2 Control circuit Under voltage Uu3 MC fault
OC1 Over current in Acc process OC2 Over current in Dec process
OC3 Over current in constant speed Operation Ou1 Over Voltage in Acc process
Ou2 Over Voltage in Dec process Ou3 Over voltage in constant speed operation
GF Ground Fault OH1 Heat-sink Overheat
OL1 Motor Overload OL2 Inverter Overload
SC Load Short-Circuit EFO External Fault of serial communication
EF1 External Fault of terminal SP1 Input phase failure or Unbalance
SPO Output phase failure or Unbalance CCF1
Control Circuit Fault 1: Transmissionbetween the inverter and keypad cannotbe established 5 seconds after supplyingpower.
CCF2
Control circuit fault 2: Transmission betweenthe inverter and keypad is established onceafter supplying power, but later transmissionfault continues for more than 2 seconds.
CCF3 EEPROM Fault
CCF4 AD Conversion Fault CCF5 RAM Fault
CCF6 CPU disturbance PCE Parameters copy Error
HE Hall current detection fault DE Fault categories
CUE Fault categories
PE.05 Running status at last fault Setting range: 0~3 [StP]0: StP Stop 1: Acc Accelerate
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
165
2: dEc Decelerate 3: con constant
PE.06 Fault History 1 (Last One) Setting range: Table 5-14-1 [NULL]PE.07 Fault History 2 Setting range: Table 5-14-1 [NULL]PE.08 Fault History 3 Setting range: Table 5-14-1 [NULL]
Notes: Memorize the types of the last 3 faults. See Table 5-14-1 for the details of faults.
PE.09 Total Operating time(h) Setting range: 0~65530h [0]PE.10 Total Power On time(h) Setting range: 0~65530h [0]PE.11 Total electric-consumption (MWh) Setting range: 0~9999MWh [0]PE.12 Total electric-consumption (KWh) Setting range: 0~999KWh [0]
Notes: Accumulated Operation Time (h): total time of the frequency inverter in the operation state Accumulated Startup Time (h): accumulated time of the frequency inverter in the startup state Accumulated Power Consumed (MWh): the highest level of accumulated power consumed by the frequency
inverter Accumulated Power Consumed (KWh): the lowest level of accumulated power consumed by the frequency
inverter
5.16 Protection of parameters (Group PF)
PF.00 User password Setting range: 0~9999 [0]Notes: User password setting: The initial value of user password is 0, which means the password protection function
is invalid. At this state, user can access all parameters and parameters content of Group PF. User Password Unlocking: after the user password is set and becomes effective, the password should be input
for unlocking to enter Group PF again. Otherwise, not all parameters in Group PF can be accessed. Changing the user password: If password protection function is effective, right password must be input first to
unlock. After unlocking, select PF.00, re-change this parameter value, and press “ENTER” to save the value.Now, the password changing is completed. Before changing the user password, remember to set PF.01 to 0, sothat all parameters are allowed to be changed.
Tips:
The password will become effective when you press “PRG/ESC” to exit from Group PF if you set userpassword.Please remember the password, otherwise, you will have no access to all parameters of Group PF.If you forget user password, please contact with manufacturer,Example: Set the password to 1234, then exit from Group PF and unlock the user password. The process isshown in Figure. 5-15-1 and Figure. 5-15-2.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
166
PF.00
Menulevel 3displayFunc.codePF.00
Go intouser
passwordsetting,initialvalue is
0
Shiftcursorto
right
Shiftcursorto
right
Enter tosaveuser
password.
Shiftcursorto
right
0000 1000 1000 1200 1200 1230 1230 1234 PF.00
Turnright 1timesto setthevalueto 1
>>>> >>ENTER ENTER+ + + +
-PF-
Menulevel 2displaygroupPF
LEDDisplay
Keyoperation
ENTER
Turnright 2times,to setthevalueto 2.
Turnright 3times,to setthevalueto 3.
Turnright 4times,to setthevalueto 4.
Figure. 5-16-1Flow chart of user password setting
-PF-
Menulevel 2,displayPF group
Go into userpassword
verification
Shiftcursorto
right
Shiftcursorto
right
LEDDisplay
KeyOperation
Enter to passpassword
verification,go into edit
state
Shiftcursorto
right
Turnright3
times
0000 1000 1000 1200 1200 1230 1230 1234 PF.00
Turnright4
times
turnright2
times
High bitbliniking
turnright 1times
>>>> >>ENTERENTER+ + + +
Figure. 5-152 Flow chart of user password unlocking
PF. 01 Parameter write-in protection Setting range: 0~2 [0]0: All parameters are allowed changing;1: Except the set frequency (P0.02) and this function code, other function codes are not allowed to be revised.2: Except the function code, the rest are not allowed to be revised.
Notes: PF.01 is set to 0: All parameters are allowed to be changed But only the parameters, which are marked “○” in
function table, can be changed no matter what the inverter is running or not. The parameters, which aremarked “×”can be only changed when the inverter is in stop state. Other parameters cannot be changed.About the changeable of parameters, refer to Chapter 4 for details. In addition, you can examine theparameters display on keypad. If any digit of the parameter is flashing, the parameter is allowed to change. Ifnone digit of the parameter is flashing, it cannot be changed.
PF.01set as 1: except the set frequency (P0.02) and this function code, other function codes are not allowed tobe revised.
PF.01set as 2: except the function code, the rest are not allowed to be revised.
Tips:
In the state of startup parameter monitoring, when PF.01 is set as 0, all parameters are allowed to be revised,and the set frequency, speed PID giving and analog PID digital giving can be adjusted and saved on line.When PF.01 is set as 1, only the set frequency can be adjusted and saved. When PF.01 is set as 2, all on-lineadjustments are invalid.
PF.02 Parameter initialization Setting range: 0~3 [0]0: No operation 1: Clear fault history2: reset the ex-factory value(except therecord\password\motor parameters)
3: reset the ex-factory value(except therecord\password)
Notes: When PF.02 is set as 0, there is no operation.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 5 Detailed Function Introductions
167
When PF.02 is set as 1, all fault records of PE.00~PE.08 in Group PE will be cleared to facilitate debuggingand fault analysis by the user.
When PF.02 is set as 2, the ex-factory values will be reset (except the operation history records, userpassword setting and motor parameters).
When PF.02 is set as 3, the ex-factory values will be reset (except the operation history records and userpassword setting).
Tips:
If user forget the setting value of parameters, and do not want to set them one by one, setting PF.02 to 2 can beused to rapidly restored to defaults, in favor of parameters resetting.After the historical fault records are cleared or the ex-factory values are reset, PF.02 will be restored to 0automatically, which means that the corresponding operation has been finished.
PF.03 Parameter copy Setting range: 0~3 [0]0: No action 1: Parameters download2: Parameters upload 3: Download parameters except motor’s
Notes: When PF.03 is set as 0, there is no action. When PF.03 is set as 1 and all parameters are downloaded, the user-set parameters saved on the keypad will
be copied to the frequency inverter. When PF.03 is set as 2 and parameters are uploaded, all parameters set by the user will be copied to
EEPROM of the keypad from the frequency inverter. When PF.03 is set as 3 and non-motor parameters are downloaded, the user-set parameters saved on the
keypad, except the motor parameters, will be copied to the frequency inverter.
Tips:
In the same working conditions, if the function of frequency inverter is applied, parameters set by the user canbe copied quickly to reduce the debugging and maintenance time.The function of parameter copying is only effective for the keypad with LCD. It will be restored to 0automatically after copying is finished.
PF.05 Product ID 1 Setting range: 0~9999 [Depending on model]PF.06 Product ID 2 Setting range: 0~9999 [Depending on model]
PF.07 Product ID 3 Setting range: 0~9999 [Depending on model]
PF.08 Product ID 4 Setting range: 0~9999 [Depending on model]
PF.09 Product series number Setting range: 0~9999 [Depending on model]
PF.10 Software version number Setting range: 0.00~99.99 [Depending on model]PF.11 Non-standard version and serial number Setting range: 0.000~9.999 [Depending on model]PF.12 Software identification code Setting range: 0~9999 [Depending on model]
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
168
Chapter 6 Troubleshooting
6.1 TroubleshootingWhen the inverter has detected a fault, the keypad will display the fault code, and the inverter will stop PWM outputand come into fault state. In the fault indicator TRIP will flicker, the fault relay will output the programmingfunction and the motor will coast to stop. At this time, you should find the reason of fault and apply correctiveactions. If the listed troubleshooting cannot solve the problem, please contact our company directly. After debugging,
you can press STOPRESET or replace external terminals to restart the inverter. Notes: the inverter can’t startup even
through debugging has been finished if operating signal isn’t removed, you should cut operating signal first and thenclose again or remove main circuit power supply once to make the fault reset. If the SC fault appeared, thereplacement is only permitted after 10 seconds. If you want to see the work condition (such as output frequency,
reference frequency, output current, bus voltage., etc) or contents of the latest three fault, please press PRGESC
to
enter into program state and then dial - + to see parameter value of function code PE.00~PE.08.
Table 6-1 Troubleshooting
FaultDisplay Name of Protection Possible Cause to Fault Countermeasure
Uu1 Busbar undervoltage The input voltage isabnormal
Check the voltage ofpower supply
Check and test theelectrical level settingUu2
The Undervoltage with the controlcircuit①
The control circuit is undervoltage
Uu3 The charging circuit is poor ① The contactor doesn’t pullin.
Check the chargingcircuit
OC1 Overcurrent with the acceleratedoperation
The acceleration time is tooshort
The V/F curve is notappropriate
The power voltage is low The frequency inverter
power is too small The frequency inverter
output load isshort-circuited.
Increase the accelerationtime
Adjust the V/F curvesetting and have theappropriate torque boostsetting
Check the input powersupply
Select the frequencyinverter with the largepower
Check the motor coilresistance and the motorinsulation
OC2 Overcurrent with the deceleratedoperation
The deceleration time is tooshort
The load inertia torque islarge
The frequency inverterpower is too small
The frequency inverteroutput load isshort-circuited
Increase the decelerationtime
Add the appropriatebrake componentsadditionally
Select the frequencyinverter with the largepower
Check the motor coilresistance and the motor
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
169
FaultDisplay Name of Protection Possible Cause to Fault Countermeasure
insulation
OC3 Overcurrent with theconstant-speed operation
Abnormal load The acceleration or
deceleration time is set tobe too short
The power voltage is low The frequency inverter
power is too small The frequency inverter
output load isshort-circuited
Check the load Increase the acceleration
or deceleration timeappropriately
Check the input powersupply
Select thefrequency-inverter withthe larger power
Check the motor coilresistance and the motorinsulation
Ou1 Overvoltage with the acceleratedoperation
The input voltage isabnormal
The acceleration time set istoo short
The stalling overvoltagepoint is too low
Check the input powersupply; check & test theelectrical level setting
Increase the accelerationtime appropriately
Raise the stallingovervoltage point
Ou2 Overvoltage with the deceleratedoperation
The input voltage isabnormal
The deceleration time is tooshort
The load inertia torque islarge
The stalling overvoltagepoint is too low
Check the input powersupply; check & test theelectrical level setting
Increase the decelerationtime appropriately
Add the appropriatebrake componentsadditionally
Raise the stallingovervoltage point
Ou3 Overvoltage with theconstant-speed operation
The input voltage isabnormal
The acceleration ordeceleration time is tooshort
The load inertia torque islarge
The stalling overvoltagepoint is too low
Check the input powersupply; check & test theelectrical level setting
Increase the decelerationtime appropriately
Add the appropriatebrake componentsadditionally
Raise the stallingovervoltage point
GF Output earthing The output earthing currentexceeds the specified value
Check whether the motorinsulation has becomepoor
Check whether theconnection line betweenthe frequency inverterand the motor is damaged
OH1 Heat radiator overheating
The environmenttemperature is too high
The air duct is blocked The fan works abnormally/
is damaged
Reduce the environmenttemperature
Clear the air duct Replace the fan
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
170
FaultDisplay Name of Protection Possible Cause to Fault Countermeasure
OL1 Motor overloaded
The frequency inverteroutput exceeds the motoroverload value
The V/F curve isinappropriate
The power grid voltage istoo low
The ordinary motoroperates at the low speedand with the large load fora long time
The motor stalls or the loadbecomes too large suddenly
Reduce the load Adjust the V/F curve and
the torque boost Check the power grid
voltage Select the special motor Check the load
OL2 Frequency inverteroverloaded
The frequency inverteroutput exceeds its overloadvalue
The DC brake quantity istoo large
The V/F curve is notappropriate
The power grid voltage istoo low
The load is too large The acceleration time is too
short The current limit level is
too low
Reduce the load andincrease the accelerationtime
Reduce the DC brakecurrent and increase thebrake time
Adjust the V/F curve andtorque boost
Check the power gridvoltage
Select the frequencyinverter with the largerpower
Increase the accelerationtime
Raise the current limitlevel
SCLoad short-circuit/outputearthing short-circuit③
The frequency inverteroutput load isshort-circuited
The output side earthing isshort-circuited
Check whether theconnection time betweenthe frequency inverterand the motor is damaged
Check the motor coilresistance
Check the motorinsulation
EF0 External fault with the RS485serial communication
3) The serial (MODBUS)transmission is wrong
4) Fault caused by the externalcontrol circuit
Set the correct timeoutdetection time or set thePb.03 timeout detectiontime as 0.0s
Check the externalcontrol circuit
Check the input terminalconditions. If terminalsare not used but the faultis still displayed, pleaseseek the technicalsupport for settlement.
EF1
External fault with terminalsX1~X10 (for the type of3004GBand the below, thereare only terminals X1~X5)
SP1 Input phase loss or imbalance Input R,S & T phase loss orimbalance
Check the input voltage Check the input
connection line
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
171
FaultDisplay Name of Protection Possible Cause to Fault Countermeasure
SP0 Output phase loss orimbalance
Output R,S & T phase lossor imbalance
Check the outputconnection line
Check the motor andcable insulation
CCF1 Control circuit fault 0
Transmission between thefrequency and the keypadcannot be establishedwithin 5s after power issupplied (when power isjust supplied)
Re-pull out and re-insertthe keypad
Check the connectionline
Replace the keypad Replace the control panelCCF2 Control circuit fault 1
The frequency and thekeypad communicate onceafter power is supplied, butthe transmission faultafterwards last for at least2s (in operation)
CCF3 EEPROM fault EEPROM fault with the
control panel of frequencyinverter
Replace the control panel
CCF4 AD conversion fault AD conversion fault with
the control panel offrequency inverter
Replace the control panel
CCF5 RAM fault RAM fault with the controlpanel of frequency inverter Replace the control panel
CCF6 CPU disturbance
Serious disturbance MCU reading & writing
error with the control panel The communication line is
connected reversely or thedialing switch dialsincorrectly
Reset via the
buttonSTOPRESET
Add the power filter atthe power sideadditionally
Seek the technicalsupport
PCE Parameter copying error②
Error with the parametercopying between thekeypad and EEPROM ofthe control panel
EEPROM of the controlpanel is damaged
Repeat the copyingoperation
Replace the control panel Seek the technical
support
HE Current detection fault
Fault with the frequencyinverter current detectioncircuit
The Hall elements aredamaged
Replace the frequencyinverter
Seek the technicalsupport
Notes:①The small/medium-power inverters (Type 3022G/3030P and the below) have not the Uu2 fault(undervoltage with the control circuit) and the Uu3 fault (poor charging circuit).②Only the selectively-configured LCD keypads have the function of parameter copying, while the standardLED keypads have not the function.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
172
6.2 Warning display and explanationAfter action of warning function, warning code is flickered display, but the inverter is not in fault-protecting state:PWM output will not be closed off, fault relay will not act. In addition, the inverter would automatically return toprevenient operation state after the warning signal disappeared.
The following table lists different kinds of Warnings.
Table 6-2 Warning display and description
AlarmDisplay Display Content Description
Uu Undervoltage detection Undervoltage is detected. The frequency inverter can still work inthis case.
OLP2 Frequency inverteroverload pre-alarm
The frequency inverter working current is over the overloaddetection level and the duration is over the overload detection time.In this case, the frequency inverter can still work.
OH2 Heat radiator too high The heat radiator temperature is larger than the OH2 detectionbenchmark. In this case, the inverter can still work.
AE1 Analog signal 1 isabnormal
The input analog signal in the analog input signal passage AI1exceeds the allowed maximum range of -0.2~+10.2V.
AE2 Analog signal 2 isabnormal
The input analog signal in the analog input signal passage AI2exceeds the allowed maximum range of -0.2~+10.2V.
AE3 Analog signal 3 isabnormal
The input analog signal in the analog input signal passage AI3exceeds the allowed maximum range of -0.2~+10.2V.
SF1 Function code setting isinappropriate
For example, for the I/O terminal, SS0-2 and TT0-1setting is notincomplete
SF2The manner selection isinconsistent with theterminal setting
The operation manner set is inconsistent with the setting of terminalX1~X10.
SF3
Wrong output terminalsare selected (only forinverters of 35R5GB andthe above)
There are totally three open collector output circuits with thefrequency inverter. The output terminals D0, Y1, Y2 and Y3areprogrammable multifunctional terminals. The user can output somecontrol and monitoring signals selectively based on the need. Whenthe collector output is selected as the program operation stepindication or fault indication, the function-defined content shouldbe the same, all 26 or 27, to make the combination of D0, Y1, Y2and Y3 effective.
AtE Parameter setting isabnormal
The parameter setting is abnormal. The inverter will escape fromthe parameter setting automatically.
6.3 Motor’s faults and corrective measure
If the motor has one of the following faults, please find the reason and take corresponding corrective measure. Seekfor tech support if the measure does not work
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
173
Table 6-3 Motor fault and corrective measure
Fault Check Content Corrective Measures
The motorfails to run
Check whether the power is supplied to thepower terminals R, S and T and whetherthe CHARGE LED indicator light is on.
Be connected to the power supply Disconnect the power supply and then be
connected to it again. Check the power voltage Check whether the terminal screws have
been tightened
The motorfails to run
Test whether the voltage of terminals U,V and W is correct with the rectifiervoltmeter
Disconnect the power supply and then beconnected to it again.
Check whether the motor has been lockeddue to overload Reduce the load and remove the lockout
Check whether there is fault display on thekeypad and whether the TRIP light isflickering
Search Table 6-1 according to the faultcodes
Check whether there is the operationcommand
Check whether the operating terminalconnection lines and the connection linesbetween 24V & PLC are connectedreliably
Check whether the anti-reverse selectionsetting conflicts with the directioncommand
Set the reverse allowing or directionchanging command
Check whether the terminal operationsignal is disconnected first and thenconnected after the fault occurs
The terminal operation signal isdisconnected first and then connected
Check whether the given frequency voltageis input Check the given frequency voltage
Check whether the operation manner is setcorrectly Input the correct setting
The motorrotatesreversely
Check whether the connection lines ofterminals U, V and W are correct
Adjust the corresponding connection linesof terminals U, V and W
Adjust the function code P2.45The motorrotates butcannotchange thespeed
Check whether the connection lines ofgiven frequency circuit are correct Correct the connection lines
Check whether the load is too large Reduce the load or increase theacceleration or deceleration time
The motorrotatingspeed is toohigh or toolow
Check whether the maximum outputfrequency setting value is correct
Check the maximum output frequencysetting value
Check whether the voltage drop betweenthe motor terminals is too large with therectifier voltmeter
Check the V/F characteristic value
The motorrotatingspeed isunstableduringoperation
Check whether the load is too large Reduce the loadCheck whether the load variation is toolarge Reduce the load variation
Check whether there is phase loss with thethree-phase power
Check whether there is phase loss with theconnection lines of the three-phase power
For the single-phase power, connect theAC reactor to the power supply
The frequency giving source is unstable Check the frequency giving sourceThere is toomuch noisewith themotor
The bearing is worn, lubrication is poor ,and the rotor is eccentric Repair the motor
The carrier frequency is too low Increase the carrier frequency
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 6 Troubleshooting
174
Fault Check Content Corrective MeasuresThere is toolargevibrationwith themotor
Mechanical resonance Adjust the leaping frequency
The machine legs are not even Adjust the machine legs
The three-phase outputs are imbalanced Check the frequency inverter output
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
175
Chapter 7 Peripheral Equipment
7.1 Peripheral Equipment Connection Diagrams
RST
隔离开关
断路器或熔断器
交流输入电抗器
接触器
输入EMI滤波器
R S T
WVU
ALPHA5000
PE
M
制动电阻
输出EMI滤波器
交流输出电抗器
PB
+
-
电动机
Figure 7-1 S2R4GB~3015GB Peripheral Equipment Connection Diagram
Motor
AC Output Reactor
Output EMI Filter
Braking resistor
Input EMI Filter
AC Input Reactor
Contactor
Breaker or fuse
Isolating switch
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
176
Figure 7-2 3018GB~3500G Peripheral Equipment Connection Diagram
Motor
AC Output Reactor
Output EMI Filter
Braking resistor
Braking Unit
DC Reactor
Input EMI Filter
AC Input Reactor
Contactor
Breaker or fuse
Isolating switch
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
177
7.2 Function of Peripheral EquipmentTable 7-1 Function of Peripheral Equipment
PeripheralEquipment& OptionalElements
Breaker Contactor * ACReactor *EMI Filter
* Braking Unitand Brakingresistor
Description
It is used to cutoff the faultcurrent of thefrequencyinverter rapidlyand prevent thepower faultcaused by faultwith theinverter and itscircuits.
It is used to cutoff the mainpower supplyat the time offrequencyinverter faultand preventpower failure& restartingafter the fault.
It is used toimprove theinput powerfactor,reduce thehigherharmonicand inhibitthe powersurge.
It is used reduce theradio disturbancecaused by thefrequency inverter.When the wiringdistance between themotor and thefrequency inverter isless than 20m, it issuggested to beconnected to the powersupply side; when thedistance is over 20m,is suggested to beconnected at the outputside.
They are selectedand used when thebraking torquecannot meet therequirements, andare applicable onoccasions ofhigh-inertia load &frequent braking orrapid stop.
Remarks: *-marked items are optional elements.
7.2.1 AC Input Reactor
Using AC reactor can restrain higher harmonic wave and improve power factor obviously. In thefollowing situation, users are advised to use ac reactor.
●Ratio of capacity: power supply source: Inverter>10:1●Silicon controlled load and switching controlled power factor compensator in a same place.●Degree of three-phase voltage unbalance is more than 3%
Table 7-2 List of Common AC Input Reactors
Voltage (V) Power(kW)
Current(A)
Inductance(mH) Voltage (V) Power
(kW)Current
(A)Inductance
(mH)
Single-Phase220
0.4 5.1 10
Three-Phase380
45 96 0.21
0.75 9.2 7.6 55 128 0.18
1.5 13 4.8 75 165 0.13
2.2 25 3.2 93 195 0.11
Three-Phase380
0.75 3.7 7.6 110 22 0.09
1.5 5.4 4.8 132 262 0.08
2.2 7 3.2 160 302 0.06
4 11 2.0 185 364 0.05
5.5 14 1.5 200 385 0.05
7.5 18 1.2 220 420 0.05
11 27 0.8 250 480 0.04
15 34 0.6 280 530 0.04
18.5 41 0.5 315 605 0.04
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
178
Voltage (V) Power(kW)
Current(A)
Inductance(mH) Voltage (V) Power
(kW)Current
(A)Inductance
(mH)
22 52 0.42 355 660 0.03
30 65 0.32 400 750 0.03
37 80 0.26 500 900 0.025
7.2.2 EMI Filter
EMI filter is used to restrain transmit of Electromagnetic Interference (EMI) and external radio interference;including instant impulsion and surge
Table 7-3 Three-phase three-wire EMI filter selection
Voltage(V)
MotorPower(kW)
Filter Type
Major Parameters of FilterCommon-model Input Loss
dBDifferential Model Input Loss
dB0.1
MHz1
MHz30
MHz0.1
MHz1
MHz30
MHz
Single-phase 220
0.4 DL-5EBT1 75 85 55 55 80 60
0.75 DL-10EBT1 70 85 55 45 80 60
1.5DL-20EBT1 70 85 55 45 80 60
2.2
Three-phase 380
0.75DL-5EBT1 75 85 55 55 80 60
1.5
2.2DL-10EBT1 70 85 55 45 80 60
4
5.5~7.5 DL-20EBT1 70 85 55 45 80 60
11~15 DL-35EBT1 70 85 50 40 80 60
18.5~22 DL-50EBT1 65 85 50 40 80 50
30~37 DL-80EBT1 50 75 45 60 80 50
45 DL-100EBK1 50 70 50 60 80 50
55~75 DL-150EBK1 50 70 50 60 70 50
On occasions that have high requirements on the radio disturbance prevention and that are consistent with the CE,UL and CSA standards, or in the case that there is the equipment without the adequate anti-disturbance ability aroundthe frequency inverter, etc, the filter should be used. When the filter is installed, the connection lines should be asshort as possible, and the filter should approach the frequency inverter as possible. The filter earthing cannot beconnected with the thin long wire. Instead, the external shell of filter should be fixed directly on the back plate of themetal case, where the surface coating has been removed. The surface-contacting earthing manner can reduce thehigh-frequency earthing impedance, so the filter can play its due role to the largest extent.
7.2.3 Braking Unit and Braking resistor
Brake units are installed inside this series of frequency inverters (Type 3015GB and the below). When dynamicbraking is required, the user just has to connect the braking resistor. There are not brake units with the inverters of3018G and the above. When the dynamic braking is required, the additional braking unit should be connected. Thebraking unit consists of the control part, the driving part and the discharging resistance. The control part should beadjusted according to the overvoltage protection action values for this series of frequency inverters. If thedischarging resistance part is provided with the overheating protection, it is suggested that the controlling connection
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
179
point be connected to the main control circuit.In Table 7-4 are the guiding data. The user can select the different resistance values and power according to theactual conditions (however, the resistance value cannot be less than the recommended value in the table, while thepower can be determined by referring to the calculation result). The braking resistor should be selected anddetermined according to the generator power in the actual application system. It is related to the system inertia,deceleration time, and potential energy load, etc, and should be selected according to the actual conditions. Thelarger the system inertia is, the shorter the deceleration time required is, and the more frequent braking is, thebraking resistor with the larger power and the smaller resistance value should be selected.
Table 7-4 Motor power and brake resistor selection
Voltage (V) Motor Power (kW) Resistance Value (Ω) Resistance Power (kW)
Single-phase 220
0.4 100 0.10
0.75 100 0.10
1.5 100 0.10
2.2 70 0.15
Three-phase 380
0.75 150 0.25
1.5 150 0.25
2.2 100 0.40
4 75 0.80
5.5 75 0.80
7.5 75 0.80
11 50 1.00
15 40 1.50Notes: in this table, suggestions are only given for selection of the brake units installed inside the series offrequency inverters (Type 3015GB and the below) with the same power grade. For Type 3018G and the above,brake units should be installed additionally. The braking resistor should be selected by referring to the technicalspecifications of braking unit and the following calculation method.
At braking, the regenerated energy of motor is almost consumed on the braking resistor. The braking power can becalculated according to the following formula:U×U÷R = PbIn the formula, R is the value of selected braking resistor, U is the braking voltage at stable braking of the system (itvaries with different systems; for the 380VAC system, it is generally taken as 700V), and Pb is the braking power.Theoretically, the power of braking resistor is the same with the braking power, but generally 70% of it will be used.Power required by the braking resistor can be calculated according to the following formula:0.7×Pr = Pb×DIn the formula, Pr is power of the braking resistor, and D is the braking frequency (proportion of the regenerationprocess in the whole working process), which can be selected according to the following table:
Table 7-5 Reference for Braking Frequency
ApplicationOccasion
Elevator Uncoiling &Coil Taking
Centrifuge AccidentalBraking Load
GeneralApplication
BrakingFrequency
20%~30% 20~30% 50%~60% 5% 10%
7.2.4 Leakage Protector
As there is direct earth safety capacitor or distributed capacitor inside the frequency inverter, the motor and with theinput & output lead wires, and the series of frequency inverters of the low-noise type, the higher carrier wave is used.Thus, the earth leakage current of the frequency inverter is large, which is more obvious for the large-capacitor
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 7 Peripheral Equipments
180
inverters. Sometimes, it may cause malfunction of the leakage protection circuit.In the above cases, not only the carrier frequency should be reduced appropriately, the lead wire should be shortenedand the output reactor should be installed, but also the leakage protector should be installed. When the protector isinstalled, attention should be paid to the following points:The leakage protector should be installed at the input side of frequency inverter and had better behind the breaker.The leakage protector functioning current should be 10 times larger than the leakage current of this circuit underthe fundamental frequency power supply and with the frequency inverter unused (total leakage current of circuits,EMI filter and motor, etc).
7.2.5 Capacitor Box
The optional element is applied specially on occasions where continuous operation is required as there is a largemoment (over 20ms) of power off. It can be ordered in our company. In the order, please specify the actual loadand the continuous operation time required after power off, so we can manufacture the appropriate.As the capacitance box may influence some parameters in your machine after it is assembled, thepreparation by the user is not recommended.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 8 Maintenance
181
Chapter 8 Maintenance
Danger
1. Please do not touch the terminals of frequency inverter, which are provided with the high voltage.There is the danger of electric shock.
2. Before power is supplied, please do install the terminal casing well. When the casing is dismantled, pleasedo cut off the power supply.There is the danger of electric shock.
3. Maintenance and inspection cannot be started until the main circuit power supply is cut off and theCHARGE LED indicator light is confirmed to go out.There is the danger of residual voltage on the electrolytic capacitor.
4. Non-professionals are not allowed to do the job of maintenance and inspection.There is the danger of electric shock.
Caution
1. As the CMOS integrated circuit is installed on the keypad panel, the control circuit board and the drivingcircuit board, please pay special attention when they are used. If the circuit boards are touched with thefinger directly, the integrated chips on them will be damaged by the electrostatic induction.
2. Please do not change the connection lines or dismantle the terminal lines when power is supplied.There is the danger of electric shock.
3. Please do not check the signal during operation. Otherwise, the equipment may be damaged.
8.1 Inspection and MaintenanceInverter is a typical product, which combines the power electronics technology with the microelectronics technology.Therefore, it double features with industrial Equipment and microelectronics Equipment. The change of environmentsuch as temperature. Humidity, smog and internal components aging factor will cause kinds of faults to the inverter.For long time secure operation, daily inspection and regular maintenance (at least 3 or 6 months interval) is needed.
8.1.1 Daily Inspection
Before inverter running, please check below: Whether there is abnormal sound or vibration with the motor; whether the frequency inverter and the motor heat up abnormally; whether the environment temperature is too high; whether the load ammeter indicates the same value as usual: whether the cooling fan of frequency inverter operates normally; Whether the braking resistor has the good earthing insulation.
The daily maintenance and inspection content is showed in Table 8-1.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 8 Maintenance
182
Table 8-1 Content and Notice for Daily Maintenance & Inspection
No. InspectionItem Inspection Part Inspection Content Judgment Standard
1 Display LED Monitor Whether the display isabnormal.
Determine according to theuse state (e.g. when nothing isdisplayed after power issupplied, the braking resistorand the earthing insulationcan be checked )
2 CoolingSystem Fan
Check whether it rotatesflexibly, whether there isabnormal sound, andwhether it is jammed bydust.
No abnormality
3FrequencyInverterBody
Inside the MachineCase
Temperature rising,abnormal sound, peculiarsmell and accumulateddust
No abnormality
4 UseEnvironment
SurroundingEnvironment
Temperature, humidity,dust and harmful gas, etc According to Clause 2.2
5 Voltage Input & OutputTerminals Input and output voltage According to the technical
specifications in Appendix 2
6 Load MotorTemperature rising,abnormal sound andvibration
No abnormality
8.1.2 Regular Maintenance
The power supply must be cut off before regular maintenance. Only after the monitor has no display and chargeLED has lit off 5-10 minutes can the maintenance begin. On the other hand, you will risk electric shock becausethere are storage capacitors within the inverter that will hold charge even after the input power is disconnected.The regular maintenance contents and cautions are listed in Table 8-2.
Table 8-2 Content of Regular Maintenance & Inspection
Inspection Item Inspection Content Countermeasure
Screws of main circuitterminals and controlcircuit terminals
whether the screws areloosened Tighten them with the screwdrivers
Heat Radiation Fin whether there is dust Purge it with the 4~6kg/cm2 dry compressed airPCB (Printed CircuitBoard) whether there is dust Purge it with the 4~6kg/cm2 dry compressed air
Cooling Fan
whether it rotates flexibly,whether there is abnormalsound or vibration, andwhether is accumulated dustor blocking object
Replace the cooling fan and clear the dust & foreignobjects
Power Element whether there is dust Purge it with the 4~6kg/cm2 dry compressed air
Electrolytic Capacitor
Check whether there iscolor variation, peculiarsmell, bubbles and liquidleaked, etc
Replace the electrolytic capacitor
Braking Capacitor whether the earthinginsulation is good
Put the braking resistor at the dry and insulatedplace
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 8 Maintenance
183
During the inspection, elements cannot be dismantled or shaken freely. Moreover, connectors cannot be pulled outfreely. Otherwise, the frequency inverter may not be able to run normally or may enter the fault display state. Even,element faults may be caused or the main switch element IGBT module or other elements may be damaged.When measurement is required, it should be noted that results with great difference may be got with differentinstruments. It is recommended that the moving-coil voltmeter be used to measure the input voltage, the bridgevoltmeter be used to measure the output voltage, clamp-on ammeter be used to measure the input & output current,and the electric wattmeter be used to measure the power. If conditions are inadequate, the same meter can be used formeasurement and record should be reserved to facilitate comparison.If the waveform test is required, it is suggested the oscilloscope with the scanning frequency larger than 40MHz beused. When the instantaneous waveform is tested, the oscilloscope with the frequency over 100MHz should beused. Before the test, electric isolation should be done for the oscilloscope.The recommended connection method for electric measurement of the main circuit is showed in Figure 8-1 belowand the instruction is showed in Table 8-3:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 8 Maintenance
184
DO GND
F
(-)(+) U
V
WT
S
R A
A
A
V
V
V
W
W
V
V
V
A
A
A
W
W
V
输
入
电
源
M
Figure 8-1 Recommended Connection Method for Main Circuit Electric Measurement
Table 8-3 Instruction on Main Circuit Electric Measurement
Item Input(Power supply)
DCIntermediate
Link
Output(Motor)
D0terminals
Wav
efo
rm Volta
ge
Cur
rent
Measuringinstrument Voltmeter Current
meterPowermeter
DCvoltmeter
Voltmeter
Currentmeter
Powermeter
Voltmeter
InstrumentType Moving-coil Electro-
MagneticElectro-dynamic
Magneto-Electric
Rectifier-type
Electro-Magnetic
Electro-dynamic
Magneto-Electric
Parameter
Virtualvalue of
Firstharmonic
Totalvirtualvalue
Totalvirtualpower
DCvoltage
Virtualvalue of
Firstharmonic
Totalvirtualvalue
Totalvirtual
value ofpower
DCvoltage
In the case of serious power supply asymmetry or three-phase current imbalance, it is suggested the three-wattmetermethod be used to measure the power.As the electric insulation test and the dielectric strength test have been done for the product before it leaves thefactory, the users don’t have to do such tests again. Moreover, such tests will reduce the insulation and voltagewithstand performance of the product. If such tests are conducted inappropriately, product elements may even bedamaged. If such tests have to be done really, it is suggested they be conducted by the skilled technicians.If the main circuit voltage withstand test is done, the withstand voltage tester with the time & leakage current settableand the similar capacity should be used. The test may reduce the life of product. If the main circuit insulation test isdone, the main circuit terminals R, S, T, U, V, W, PB(P1), + and – etc should be short-circuited reliably and then themeg-ohmmeter with the near voltage grade (250V for 220V, 500V for 380V, and 1000V for 660V) should be usedfor measurement. The control circuit should be measured with the resistance shift of the universal meter instead ofthe meg-ohmmeter.For the 380V main circuit, the ground insulation resistance should not be less than 5 MΩ; for the control circuit,the ground insulation resistance should not be less than 3 MΩ.
8.1.3 Regularly-replaced Elements
To ensure the long-term and reliable operation of frequency inverter, regular care and maintenance should be
Inputpowersupply
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter 8 Maintenance
185
carried out for internal electronic elements of the frequency inverter. The life of these electronic elements varieswith the environment and conditions where the inverters are used. Generally, if the inverter is used continuously,the elements can be replaced according to the following table, which also depends on the use environment, loadconditions and inverter state, and other specific conditions.As showed in Table 8-4, the maintenance term is just for reference by the user when it is used.
Table 8-4 Replacement Time for Wearing Elements of Frequency Inverter
Name of Element Standard Years for Replacement
Cooling Fan 2~3 years
Electrolytic Capacitor 4~5 years
Printed Circuit Board 5~8 years
Fuse 10 years
8.2 Storage and ProtectionIf the frequency inverter is not used immediately after purchased and has to be stored temporarily or permanently,the following should be done: It should be put in the place within the specified temperature & humidity scope, without damp, dust and metal
dust, and with good ventilation. If it is unused for over one year, the charging test should be conducted to restore the characteristics of
electrolytic capacitor of the main circuit. During charging, the input voltage of the frequency inverter shouldbe increased to the rating value slowly with the voltage regulator. The energizing time should be at least 1~2hours.
The above test should be conducted at least once a year .The voltage withstand test cannot be conducted freely, as it will reduce the life of frequency inverter and evendamage the elements. For the insulation test, the 500V mega-ohmmeter whose insulation resistance is not lessthan 4 MΩ can be used.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Chapter IX Quality Assurance
186
Chapter 9 Quality GuaranteesThe quality guarantees of this product follows the regulations below:The guarantee scope involves only the frequency inverter body. The guarantee period, starting from the date when itis delivered from the company, is 12 months after the product is purchased but is not beyond 24 months after themanufacture date on the nameplate.For faults caused by the following reasons, the product will be repaired with charge even if it is still within theguarantee period: problems caused by incorrect operation or unauthorized repair or alteration; problems caused as the frequency inverter is used beyond the standard requirements; damage caused as it falls down or is carried violently after purchased; element aging or fault caused as it is used in the environment inconsistent with the requirements of the user
manual ; damage caused by foreign objects (e.g. insects, etc) into the inverter; damage of inverter caused by the wrong wire connection; Faults caused by the earthquake, fire, storm & flood disaster, lightning strike, abnormal voltage or other
natural disasters and reasons accompanying the disasters.For the product with faults, our company is entitled to entrust other agencies to do the job of guaranteemaintenance.If the fault is surely included in the quality guarantees content of our company and the product is useddomestically:
guaranteed replacement, return and repair within one month after the product is delivered; guaranteed replacement and repair within three months after the product is delivered; guaranteed repair within 12 months after the product is delivered
If the product is delivered overseas, guaranteed repair will be applied within 3 months after it is delivered.Relevant service expense will be calculated according to actual conditions. If there is an agreement, theexpense will be settled according to the agreement in priority.All our sales departments and agencies over China can provide the after-sale service for the product.
Additional Remarks:About liability exemption Our company shall not be liable for results caused or induced by violation of the user manual when the
product is used; Our company shall not be liable for compensation for the loss or involving and ongoing damage caused to the
user by the product faults.
About User Instruction Manual:The user instruction manual is applicable to the series of products.Our company has the lifelong liability for the product and provides all services related to use of this product.Although the product is designed and manufactured with the strict quality control system, our company should beconsulted first if it serves the following purposes that may endanger the human body or the life as a result of faults oroperation mistakes. Used for the transport equipment; Medical device; Nuclear and power equipment; Aviation and aerospace device; Various safety devices; Other special purposes
About hope for the User:
We hope vast users can propose suggestions on our product design, performance, quality and service, which will begreatly appreciated.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
187
Appendix 1 External Dimension and Installation Dimension(Unit: mm)
Specifications H H1 W W1 D D1 D2 D3 d
S2R4GB/S2R75GB 141.5 130.5 85 74 113 123 63 88 4.5
S21R5GB/S22R2GB 180 169 115 105 150 158 85 120 4.5
3R75GB/31R5GB/32R2GB 180 169 115 105 150 158 85 120 4.53004GB 195 179.5 130 114.5 157 167 100 130 5.5
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
188
Specification H H1 W W1 D D1 D2 d
35R5GB, 37R5GB 270 255 190 175 176 186 122 7
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
189
Specifications H H1 W W1 D D1 D2 d d 1
3011GB, 3015GB 373 360 235 180 176 188 125 7 12
3018G, 3022G 420 405 270 200 218 230 175 7 14
3030G, 3037G 503 488 311 200 230 242 185 8 14
3045G, 3055G 590 570 351 200 254 266 208 10 18
3075G, 3093G 698 672 400 280 260 272 213 12 22
3110G, 3132G 850 823 505 420 280 292 199 12 22
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
190
Installation dimension for three-phase 380V 160-355KW standard inverter (with the base):
Specifications W1 W2 W3 H1 H2 D1 D2 D3 d1 d23160G-X, 3185G-X, 3200G-X,
3220G-X 600 200 530 1380 1360 400 280 60 3-φ14
4-φ14
3250G-X, 3280G, -X3315G-X, 3355G-X 800 300 730 1535 1515 410 288 60 3-φ1
44-φ1
4
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
191
Installation dimension for three-phase 380V 160-355KW standard inverter (wall type):
Specification W1 W2 H1 H2 D1 D2 D3 d1
3160G-V, 3185G-V, 3200G-V, 3220G-V 600 200 1056 1026 400 245 77 6-φ143250G-V, 3280G-V,3315G-V, 3355G-V 800 300 1210 1180 410 250 88 6-φ14
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
192
Installation dimension for three-phase 380V 400-500KW standard inverter:
Specifications W1 W2 W3 H1 D1 D2 D3 d1
3400G-X, 3500G-X 1000 700 900 1800 480 300 80 4-φ22
Installation dimension for three-phase 380V 160-500KW slim-shape inverter:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
193
Specifications W W1 D H a b c d3160G, 3185G3200G, 3220G 450 514 400 1600 400 315 30 13
3250G, 3280G3315G, 3355G 450 514 400 1800 400 315 30 13
Installation dimension for three-phase 380V 400-500KW slim-shape inverter:
Hanging plugs areoptional accordingthe installation need
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 1 External Dimension and Installation Dimension(Unit: mm)
194
W D H a b c d
3400G, 3500G 800 550 2000 700 300 125 18
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 2 Technical Specifications
195
Appendix 2 Technical Specifications
Item Specifications
Rating Input Voltage &Frequency
Single-Phase: 200~240V 50/60HzThree-Phase: 380~440V 50/60Hz
Allowed Input VoltageWorking Range
Single-Phase 220V: 176~264V, frequency<±5%Three-phase 380V: 304~456V, voltage imbalance rate < 3%, frequency<±5%
Type S2R4GB S2R75GB S21R5GB S22R2GB
Matching Motor Power (kW) 0.4 0.75 1.5 2.2
Rating Output Current (A) 2.4 4.5 7.0 11.0
Type 3R75GB 31R5GB 32R2GB 3004GB 35R5GB
Matching Motor Power (kW) 0.75 1.5 2.2 4.0 5.5
Rating Output Current (A) 2.5 4.0 6.0 9.0 13.0
Type 37R5GB 3011GB 3015GB 3018G 3022G
Matching Motor Power (kW) 7.5 11 15 18.5 22
Rating Output Current (A) 17.0 25.0 32.0 37.0 45.0
Type 3030G 3037G 3045G 3055G 3075G
Matching Motor Power (kW) 30 37 45 55 75
Rating Output Current (A) 60.0 75.0 90.0 110.0 152.0
Type 3093G 3110G 3132G 3160G 3185G
Matching Motor Power (kW) 93 110 132 160 185
Rating Output Current (A) 176.0 210.0 253.0 304.0 342.0
Type 3200G 3220G 3250G 3280G 3315G
Matching Motor Power (kW) 200 220 250 280 315
Rating Output Current (A) 380.0 426.0 480.0 520.0 600.0
Type 3355G 3400G 3500G
Matching Motor Power (kW) 355 400 500
Rating Output Current (A) 680.0 750.0 900.0
Rating Output Voltage 0~rating input voltage
Maximum Overload Current 150% 1minute, 180% 20s
Control Manner V/F control/current vector control
Frequency Control Scope 0.00~650.0Hz(S2R4GB~3004GB)/0.00~400.00Hz(35R5GB and the above)
Frequency Precision digital command ±0.01% (-10℃~+40℃)analog command ±0.01% (25℃±10℃)
Set Frequency Resolution digital command 0.01Hz;analog command 1/1000 maximum frequency
Output Frequency Resolution 0.01Hz
Frequency Setting Signal 0~10V, 0~20mAAcceleration & DecelerationTime 0.1~3600 s (acceleration and deceleration time are set independently)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 2 Technical Specifications
196
Item Specifications
Braking Torque the additional braking resistor can reach 125%Voltage/FrequencyCharacteristic
4 types of fixed V/F characteristics are optional; any V/F characteristic can beset; with the PG V/F control
Protection Function
overvoltage, undervoltage, current limit, overcurrent, overload, electronicthermal relay, overheat, overvoltage stalling, load short circuit, earthing,undervoltage protection, input phase loss, output phase loss, earthing andinterphase short circuit, and motor overload protection, etc
Application EnvironmentTemperature -10℃~+40℃
Humidity 5~95% RH (without condensation)
Storage Temperature -40℃~+70℃
Application Site indoors (without corrosive gas)
Installation Site With the altitude not more than 1000m, and free of dust, corrosive gas and directsun shining
Vibration <5.9m/s2(0.6g)
Protection Class IP20
Cooling Manner natural cooling or forced air cooling
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 3 Recommendation for Selection of the Main Circuit Output Cable
197
Appendix 3 Recommendation for Selection of the Main Circuit Output Cable
Voltage(V)
PowerGrade(kW)
CableSpecification
(mm2)
Maximum Distance of Output Line (m)
Without the Output Reactor With the Output ReactorNon-shielded
Cable (m)Shielded
Cable (m)Non-shielded
Cable (m)Shielded
Cable (m)
220
0.4 kW 2.5 110 80 150 105
0.75kW 2.5 110 80 150 105
1.5kW 4 180 150 230 175
2.2kW 4 180 150 230 175
380
0.75kW 2.5 110 80 150 105
1.5kW 2.5 110 80 150 105
2.2kW 4 180 150 230 175
4kW 4 180 150 230 175
5.5kW 4 200 160 250 185
7.5kW 6 200 160 250 185
11kW 6 200 160 250 185
15kW 6 200 160 250 185
18.5kW 10 200 160 250 185
22kW 16 200 160 250 185
30kW 25 220 180 280 210
37kW 25 220 180 280 210
45kW 35 240 200 320 250
55kW 35 240 200 320 250
75kW 70 260 220 380 260
93kW 70 260 220 380 260
110kW 95 260 220 380 260
132kW 150 260 220 380 260
160kW 185 280 240 440 340
185kW 185 280 240 440 340
200kW 240 280 240 440 340
220kW 150×2 300 260 500 400
250kW 185×2 320 280 550 430
280kW 185×2 320 280 550 430
315kW 250×2 320 280 550 430
355kW 325×2 320 280 550 430
400kW 325×2 320 280 550 430
500kW 325×2 320 280 550 430
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
198
Appendix 4 Use of MODBUS CommunicationALPHA6000S/ ALPHA6000Vcan use the programmable logic controller (PLC) and other upper devices to conductthe data exchange through MODBUS-RTU communication protocol.
Constitution of MODBUS CommunicationThe communication data busbar is a main controller (PLC) and 1~31 frequency inverters. The signal istransmitted from the main controller and the frequency inverter responds to it.The main controller conducts the signal transmission with 1 frequency inverter. All frequency invertersshould have their own address codes. The main controller transmits signals according to the specified codes.The frequency inverters will function after receiving the commands from the main controller and feed backthe response to the main controller.
Communication StandardInterface RS-485
SynchronizationManner
Asynchronous and half-duplex
CommunicationParameters
Speed: selected from 1200/2400/4800/9600/19200/38400bpsData length: fixed 8 bitsParity Check Selection: even / odd/ noneStop Byte: 1 bit fixed
CommunicationProtocol
MODBUS RTU Mode
Number ofConnectableFrequency Inverters
31 sets
Description of the communication connecting terminalMODBUS communications adopts the terminals 485+ and 485-. In addition, the terminal resistors areswitched as follows. In the case of RS-RS-485 communication, please put the ON/OFF switch 1 and 2 ofSW6 at the side of ON when the terminal frequency inverter is viewed from PLC.
Notice for Wring(1) The communication cables should be separated from the main circuit cables and other power cables & electric
cables.(2) Shielded cables should be used as the communication cables. The shielding layer should be connected to the
earthing terminal of frequency inverter, while the other end will not be connected. (To prevent malfunctioncaused by disturbance)
The sequence to have communication with PLC is as follows:1. When the power supply is cut off, connect the communication cable between PLC andALPHA6000S/ALPHA6000V.2. Supply the power.3. Set the parameters required by communication on the keypad (P0.03, P0.04, P0.07, P0.11, P7.00, P7.01,P7.03, P7.04, P8.11, P9.19, Pd.02, Pd.04 and Pb.00~Pb.06).
Terminal Resistor Switch
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
199
4. Cut off the power supply and wait until keypad display disappears completely.5. Switch on the power supply again.6. Conduct the communication with PLC.
Setting of Communication ParametersTo communicate with PLC, communication-related parameters should be set. In the following table, only Pb.01 (IDNumber) and Pb.04 (response delay time) can be revised during operation to facilitate debugging, which becomeseffective immediately, while the rest parameters cannot be revised during operation. Then can only be set during thestop time, and the reset parameters will not become effective until the inverter is powered off and then restarted.“○” revisable during operation;“×” non-revisable during operation
FunctionCode
Name ofParameter Setting Range Ex-factory
Setting Revision
After thecommunication functionis selected, MODBUScan be written into the
register
P0.03FrequencySettingSource 1
0: NULL1: Frequency number setting,number knob adjustment2: Terminal AI13: Terminal AI24: Terminal AI3 (Reserved for3004GB and the below)5: Impulse input6: Communication giving7: Linear speed (Reserved)8: Multi-segment speed9: Terminal UP/DOWN10: (PLC)Program-timingoperation (PLC)11: PID12: Pendulum frequencyoperation (and other specialoperation modes)When the frequency source is0~7, if the multi-segment speedterminal is effective, treat it as“multi-segment speed”
1 × 0002H
P0.04FrequencySettingSource 2
0~8: the same as above9: torque differencecompensation
0 × 0005H
P0.07
OperationCommandGivingMannerSetting
0: Keypad control1: Terminal control 1(Key STOPineffective)2: Terminal control 2(Key STOPeffective )3: Serial communication 1(KeySTOP ineffective)4: Serial communication 2(KeySTOP effective)5: Terminal control 3(Key STOP& JOG ineffective)
0 ○ 0001H
P0.11Upper limitof frequencysource
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (Reserved for3004GB and the below)4: Impulse input5: Communication setting
0 × 0008H
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
200
FunctionCode
Name ofParameter Setting Range Ex-factory
Setting Revision
After thecommunication functionis selected, MODBUScan be written into the
register
P1.13
Stop DCBrakingCurrentSettingSource
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (Reserved for3004GB and the below)4: Impulse input5: Communication settingTake the rating current of thefrequency inverter as 100%Only effective with the V/Fcontrol manner
0 ○ 0009H
P7.00 PID givensource 1
0: PID digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (Reserved for
3004GB and the below)4: Impulse input5: Serial communication6: Linear speed (Reserved)
0 × 0004H
P7.01 PID givensource 2 0~6: the same as above 0 × 0007H
P7.03PID
feedbacksource 1
0: Internal PG or single-phasespeed-measuring input1: Terminal AI12: Terminal AI23: Terminal AI3 (Reserved for3004GB and the below)4: Impulse input5: Serial communication
0 × 0003H
P7.04PID
feedbacksource 2
0: expand PG cardspeed-measurement input
1~5: the same as above0 × 0006H
P8.11
Drivingtorquesettingsource
0: Digital setting1: AI12: AI23: AI3 (Reserved for 3004GBand the below)4: PULSE setting5: Communication setting
0 × 000AH
P9.19Outputvoltage biassource
0: Digital setting1: Terminal AI12: Terminal AI23: Terminal AI3 (Reserved for3004GB and the below)4: Impulse input5: Communication settingTake the maximum outputvoltage as 100%Only effective with the V.Fseparation mode
0 × 000BH
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
201
FunctionCode
Name ofParameter Setting Range Ex-factory
Setting Revision
After thecommunication functionis selected, MODBUScan be written into the
register
Pd.02
MotorprotectionsensorInputPassage
0: Terminal AI11: Terminal AI22: Terminal AI3 (Reserved for3004GB and the below)3: Impulse input4: Communication setting
0 × 000CH
P8.25
Brakingtorquesettingsource
0: consistent with the finaldriving torque setting valuecalculated for P8.111: AI12: AI23: AI3 (Reserved for 3004GBand the below)4: PULSE setting5: Communication setting
0 × 0012H
*Note 1: Only when the “Communication setting” passage is selected, can the command be written into thecorresponding register in the above table. Otherwise, 02h will be reported.
*Note 2: If the Baud rate selection and the parity check selection are revised, new setting will not become effectiveuntil the inverter is stopped first and then restarted. Setting of these two items for the upper and lower computersshould be the same. Otherwise, communication cannot be established or there will be errors with communication.
*Note 3: When the frequency inverter address is set as 0, the inverter will not receive the communication command,including the broadcast command. When the frequency inverter address is larger than 0, the new address willbecome effective once it is revised.
*Note 4: To be compatible with other communication frequency commands of other series of frequency inverters byour company, please set the communication frequency command unit, e.g. set the frequency as 50Hz. If thefrequency command sent by PLC is 01F4H, 1 should be selected. After the frequency inverter receives the frequencycommand, it will be converted to 50.00Hz automatically. If 1388H is sent, 0 should be selected. The system will treatit as 50.00Hz.
Transmission Period LimitIn order to reduce the packet loss ratio caused by the communication disturbance and get the bestcommunication effect, please limit the data transmission period in the host station to ensure both datatransmission and receiving are normal.
Pb.00 Baud RateSelection
Minimum TransmissionPeriod ms
(Parity Check)
Suggested Transmission Period ms(Applicable to various check manners)
0: 1200 220ms 250ms
1: 2400 110ms 150ms
2: 4800 65ms 100ms
3: 9600 50ms 90ms
4: 19200 35ms 80ms
5: 38400 17ms 50ms
*Notes: With the parity check manner selected, the user can obtain the quickest communication response.The minimum transmission period includes the time from data transmission to receiving of correct data.If the transmission period is lower than the minimum transmission period, the data received by the host station maybe garbled.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
202
Command FormattingDuring communication, the main controller (PLC, etc) gives commands to ALPHA6000S/ALPHA6000V,and the frequency inverters respond to them. The process constitutes the information transmission &receiving as showed in the right figure. As the command function content varies, the length of data will varyas well. The interval between two commands should maintain the time recorded below.
PLC 变频器 PLC变频器 变频器
t(ms)
3.5char Pb.04设定 3.5char 5ms以上
指令 响应 指令
PLC
Frequency inverter address: Frequency inverter address (0 ~ 31)When it is set as 0, commands are transmitted together with the broadcast manner. Even if the broadcast command isreceived, the frequency inverter will not give response. Command Code
There are four types of MODBUS command codes supported by the series of frequency inverters, which areshowed as follows:
CommandCode
(16 bits )Function
Command Length Normal Response Length Abnormal Response Length
MinimumByte
Number
MaximumByte
Number
MinimumByte
Number
MaximumByte
Number
MinimumByte
Number
MaximumByte
Number
03H Reading Record 8 8 7 7 5 5
06H Single CharacterWriting 8 8 8 8 5 5
08H Loopback Test 8 8 8 8 5 5
10H Writing Record 11 11 8 8 5 5 CRC CheckThe calculation method for CRC-16 used by MODBUS communication is as follows:1. Generally, when CRC-16 is calculated, its initial value is 0, and the initial value of the communication terminal
series is set as 1. (1 for 16 bits)2. LSB according to the frequency inverter address is MSB, and the final data MSB uses LSB to calculate CRC-16.3. The response command of frequency inverter also has to calculate CRC-16 to be compared with CRC-16 in the
response command.Unsigned int CRC16(unsigned char*uptr, unsigned int ulenth){
unsigned int crc=0xffff ;unsigned char uindex ;if(ulenth>=9){
ulenth=9;}while(ulenth!=0){
crc^=*uptr ;for(uindex=0;uindex<8;uindex++){
if((crc&0x0001)==0){
crc=crc>>1 ;
FrequencyInverter
FrequencyInverter
FrequencyInverter
Command Response Command
Pb.04 Setting Over 5ms
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
203
}else{
crc=crc>>1 ;crc^=0xa001 ;
}}ulenth-=1 ;uptr++;
}return(((crc&0x00FF)<<8)|((crc&0xFF00)>>8));
} Example of Command Application[03H]
Reading of Single-character Command: read the single-character record content from the specified code. The recordcontent is divided into high 8 bits and low 8 bits and becomes part of the response content in order.Example: read the state of frequency inverter 1
Command ContentFrequency Inverter
Address 01
Command Code 03Start
AddressHigh Bit 00Low Bit 20
Number ofAddresses
High Bit 00Low Bit 01
CRCHigh Bit 85Low Bit C0
Normal Response ContentFrequency Inverter
Address 01
Command Code 03Number of Data 02
Contentof Data
High Bit 00Low Bit C1
CRCHigh Bit 79Low Bit D4
Abnormal Response ContentFrequency Inverter
Address 01
Command Code 83Abnormality Code 03
CRCHigh Bit 01Low Bit 31
Notes: The number of data doubles that of address.
[06H]Single-character Writing Command: write a single character into the specified register, and save the specified data inthe specified register. The data saved should be among the order of record codes. The command content should bearrayed in the sequence of high 8 bits and low 8 bits.Example: start the operation of frequency inverter 1
Command ContentFrequency Inverter
Address 01
Command Code 06Start
AddressHigh Bit 00Low Bit 01
Content ofData
High Bit 00Low Bit 01
CRCHigh Bit 19Low Bit CA
Normal Response ContentFrequency Inverter
Address 01
Command Code 06Start
AddressHigh Bit 00Low Bit 01
Contentof Data
High Bit 00Low Bit 01
CRCHigh Bit 19Low Bit CA
Abnormal Response ContentFrequency Inverter
Address 01
Command Code 86Abnormality Code 00
CRCHigh Bit 42Low Bit 60
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
204
[08H]Loop Test Command: the command content is fed back originally in the form of response and is used for test ofsignal transmission and returning between the main controller and the frequency inverter. Arbitrary values can beused as the test code and data.Example: loop feedback test
Command ContentFrequency Inverter
Address 01
Command Code 08
Test CodeHigh Bit 00Low Bit 00
Test DataHigh Bit 12Low Bit 34
CRCHigh Bit EDLow Bit 7C
Normal Response ContentFrequency Inverter
Address 01
Command Code 08
TestCode
High Bit 00Low Bit 00
TestData
High Bit 12Low Bit 34
CRCHigh Bit EDLow Bit 7C
Abnormal Response ContentFrequency
Inverter Address 01
Command Code 88Abnormality
Code 03
CRCHigh Bit 06Low Bit 01
[10H]Single-character Writing Command: write the content into the specified register, and write the specified data in thespecified register. The data saved should be among the order of record codes. The command content should bearrayed in the sequence of high 8 bits and low 8 bits.Example: set the frequency as 50.0Hz
Command ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 00Low Bit 02
Number ofAddresses
High Bit 00Low Bit 01
Number of Data 02
Content ofData
High Bit 13Low Bit 88
CRCHigh Bit AALow Bit E4
Normal Response ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 00Low Bit 02
Numberof
Addresses
High Bit 00
Low Bit 01
CRCHigh Bit A0Low Bit 90
Abnormal Response ContentFrequency
Inverter Address 01
Command Code 90Abnormality
Code 03
CRCHigh Bit 0CLow Bit 01
Notes: The number of data doubles that of address.
[10H]Data Saving Command: write the MODBUS register address corresponding to the function parameters into thespecial saving address of 0xFF, and save the parameter content into EEPROM. It is equivalent to ENTER of thekeypad to save the data without being lost. The command content is arrayed in the order of high 8 bits and low 8 bits.00FFH is specially used for data saving and is effective when Pb.06=0.Example: set the frequency as 30.0Hz and save it in EEPROM.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
205
Command ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 01Low Bit 02
Number ofAddresses
High Bit 00Low Bit 01
Number of Data 02
Content ofData
High Bit 0BLow Bit B8
CRCHigh Bit B1Low Bit D2
Normal Response ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 00Low Bit FF
Numberof
Addresses
High Bit 00
Low Bit 01
Number of Data 02
Contentof Data
High Bit 01Low Bit 00
CRCHigh Bit B3Low Bit CF
Abnormal Response ContentFrequency
Inverter Address 01
Command Code 90Abnormality
Code 23
CRCHigh Bit 0DLow Bit D9
[10H]Two Commands Writing: it can operate the two registers of 0001 action command and 0002 frequency setting 1. Itshould be noted that the operation command giving manner setting (P0.07) should be “serial communication” andthat the frequency setting source 1 (P0.03) should be “communication setting”.Example: set the frequency as 50.0Hz.
Command ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 00Low Bit 01
Number ofAddresses
High Bit 00Low Bit 02
Number of Data 04
Content ofData
High Bit 00Low Bit 01High Bit 13Low Bit 88
CRCHigh Bit 6ELow Bit F5
Normal Response ContentFrequency Inverter
Address 01
Command Code 10
StartAddress
High Bit 00Low Bit 01
Numberof
Addresses
High Bit 00
Low Bit 02
CRCHigh Bit 10Low Bit 08
Abnormal Response ContentFrequency
Inverter Address 01
Command Code 90Abnormality
Code 03
CRCHigh Bit 0CLow Bit 01
Notes: The number of data doubles that of address.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
206
List of Data:Command Data (writable)
MODBUSAddress Name bit Content
0000H ( Reserved)
0001H OperationSignal
0 Operation Command 1: Operation 0: Stop
1 Reverse Command 1: Reverse 0: Forward
2 External Fault 1: External Fault (EFO)
3 Fault Resetting 1: Fault Resetting Command
4 Multi-functional Input Command 1 (P3.01 X1Terminal Function)
5 Multi-functional Input Command 2 (P3.02 X2Terminal Function)
6 Multi-functional Input Command 3 (P3.03 X3Terminal Function)
7 Multi-functional Input Command 4 (P3.04 X4Terminal Function)
8 Multi-functional Input Command 5 (P3.05 X5Terminal Function)
9 Multi-functional Input Command 6 (P3.06 X6Terminal Function, Reserved for3004GBand the below)
A Multi-functional Input Command 7 (P3.07 X7Terminal Function, Reserved for3004GBand the below)
B Multi-functional Input Command 8 (P3.08 X8Terminal Function, Reserved for3004GBand the below)
C Multi-functional Input Command 9 (P3.09X9Terminal Function, Reserved for3004GBand the below)
D Multi-functional Input Command10 (P3.10 X10Terminal Function, Reserved for3004GBand the below)
E (Reserved) Note 1
F (Reserved) Note 1
0002H Frequency Setting 1 Note 2
0003H Communication PID feedback 1, data scope0-2000 corresponding to -100.0%~100.0%
0004H Communication PID setting 1, data scope 0-2000 corresponding to -100.0%~100.0%
0005H Frequency Setting 2 Note 2
0006H PID feedback 2, data scope 0-2000corresponding to -100.0%~100.0%
0007H PID setting 2, data scope 0-2000 corresponding to -100.0%~100.0%
0008H Upper limiting frequency, data scope 0-1000corresponding to 0.0~100.0%, 100.0% corresponding to theupper limiting frequency
0009H Stop DC braking current, data scope 0-1000 corresponding to 0.0~100.0%
000AH Driving torque setting, data scope 0-1000 corresponding to 0.0~100.0%, 100.0% corresponding to twice ofthe rating motor torque
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
207
MODBUSAddress Name bit Content
000BH Output voltage bias, data scope 0-1000 corresponding to 0.0~100.0%, 100.0% corresponding to themaximum output voltage
000CH Motor protection sensor input passage
0012H Braking torque setting, data scope 0-1000 corresponding to 0.0~100.0%, 100.0% corresponding twice ofthe rating motor torque
0013-001FH Reserved
Note 1: write “0” in the reserved BIT.
Note 2: when the communication frequency command is > the largest frequency, the abnormality code 21H“Beyond the Upper & Lower Limit” will be reported and the operation frequency will be reserved unchanged.
Note 3: addresses of 000DH~0011H and 0013H~001FH are reserved in the general frequency inverter.
Note 4: when the above reserved register addresses are read, address error will be fed back.
Parameters Saving [Input Command]( Writable)
Record Code Name Content Setting Range Initial Value
00FFH Input Command MODBUS address in the functionlist 0100H ~ 0FFFH —
Notes:
For the data writing command 06 and 10, only the data are written into RAM for operation and are effective forthis operation. After the inverter is powered off and restarted, the data written last time will become ineffective.If the data written by communication has to be effective after the inverter is powered off and restarted, the datashould be written and saved in EEPROM. Function 10 can be used to write the parameters of MODBUS addressto be saved into 0x00F.By writing the MODBUS address corresponding to the parameters to be saved into 0x00FFH, the parameter datain RAM will be written and saved in EEPROM. As the maximum writing times of EEPROM is 100,000, theinput command had better not be used frequently. The command is similar to ENTER in the keypad, by pressingwhich the set parameters will be written into EEPROM. The record code 00FFH is special for writing. When therecord is read, record code errors may happen (abnormality code 02H).
Monitoring Content (Read-only)
MODBUSAddress Name bit Content
0020H StateSignal
0 Operation 1: Operation 0: Stop
1 Reverse 1: Reverse 0: Forward
2 Fault Resetting 1: Fault Resetting 0: No Fault Resetting
3 Fault 1: Fault
4 Alarm 1: Alarm
5 Multi-functional Output Command 1 (1: DO ON 0: OFF)
6 Multi-functional Output Command 2 (1: Y1 ON 0: OFF) Reserved for 3004GBand thebelow
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
208
MODBUSAddress Name bit Content
7 Multi-functional Output Command 3 (1: Y2 ON 0: OFF) Reserved for 3004GBand thebelow
8 Multi-functional Output Command 4 (1: TA ON 0: OFF)
9 Multi-functional Output Command 5 (1: BR ON 0: OFF) Reserved for 3004GBandthe below
A Multi-functional Output Command 6 (1: Y3 ON 0: OFF) Reserved for 3004GBandthe below
B (Reserved)
C-F (Reserved)
0021H FaultContent
0 Overcurrent (OC)
1 Accelerating Overvoltage (Ou1)
2 Frequency Inverter Overload (OL2)
3 Frequency Inverter Overheat (OH1)
4 Decelerating Overvoltage (Ou2)
5 Constant-speed Overvoltage (Ou3)
6 HE Hall Current Detection Fault
7 External Abnormality (EFO~EF1)
8 Hardware Abnormality (CCF3~CCF6)
9 Motor Overload (OL1)
A Input/ Output Phase Loss or Imbalance (SP1~SP2)
B Busbar Undervoltage (Uu1)
C Control Circuit Undervoltage (Uu2)
D Charging Circuit Undervoltage (Uu3)
E Grounding GF or Load Short Circuit SC
F (Reserved, even if fault is reported, it will be displayed by the keypad) Keypad ConnectionAbnormality (CCF1~CCF2)
0022H AlarmContent
0 Busbar Undervoltage Alarm Uu
1 Frequency Inverter Overload Pre-alarm OLP2-
2 Analog Signal 1 Abnormality AE1
3 Analog Signal 2 Abnormality AE2
4 Overhigh TemperatureOH2
5 The serial communication doesn’t receive the normal control signal CE
6 The function code setting is inappropriate SF1(e.g. setting of SS0-2 and TT0-1isincomplete)
7 The operation mode is inconsistent with the terminal setting SF2
8 The output terminal selection 26 doesn’t reach 4 (SF3) and 27 doesn’t reach 3 (SF3).
9 Motor Parameters Setting Abnormality
A Analog Signal 3 Abnormality
B-F (Reserved)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
209
MODBUSAddress Name bit Content
0023H Before the frequency command compensation
0024H After the frequency command compensation
0025H AI1 Analog Input (V), 0~10.00V corresponding to 0~1000
0026H AI2 Analog Input (V) , 0~10.00V corresponding to 0~1000
0027H Output Current (A)
0028H Output Voltage (V)
0029H Set Frequency Hz
002AH AI3 Analog Input (V) , -10.00~10.00Vcorresponding to 0~2000
002BH
Mul
ti-fu
nctio
nalI
nput
Term
inal
Stat
e
0 Terminal X1 1: Close 0: Open
1 Terminal X2 1: Close 0: Open
2 Terminal X3 1: Close 0: Open
3 Terminal X4 1: Close 0: Open
4 Terminal X5 1: Close 0: Open
5 Terminal X6 (Reserved for 3004GBand the below) 1: Close 0: Open
6 Terminal X7 (Reserved for 3004GBand the below) 1: Close 0: Open
7 Terminal X8 (Reserved for 3004GBand the below) 1: Close 0: Open
8 Terminal X9 (Reserved for 3004GBand the below) 1: Close 0: Open
9 Terminal X10 (Reserved for 3004GBand the below) 1: Close 0: Open
A (Reserved)
B-F (Reserved)
002CH (Reserved)
002DH
Mul
ti-fu
nctio
nalO
utpu
tTer
min
alSt
ate
0 DO 1: “ON” 0: “OFF”
1 BRA-BRB-BRC Relay (3004GBand the below)1: “ON” 0: “OFF”
2 TA-TB-TC Relay 1: “ON” 0: “OFF”
3 RelayY1 (Reserved for 3004GBand the below) 1: “ON” 0: “OFF”
4 RelayY2 (Reserved for 3004GBand the below) 1: “ON” 0: “OFF”
5 RelayY3 (Reserved for 3004GBand the below)
6 (Reserved)
7-F (Reserved)
002EH AO1 Analog Output (V) 0~10.00V corresponding to 0~1000
002FH AO2 Analog Output (V) 0~10.00V corresponding to 0~1000 (Reserved for 3004GB and the below)
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
210
MODBUSAddress Name bit Content
0030H AO3 Analog Output (V) 0~10.00V corresponding to 0~1000 (Reserved for 3004GB and the below)
0031H DC Main Bus Voltage
0032H Output Torque
0033H Current Rotating Speed
0034H Set Rotating Speed
0035H Operating Linear Speed
0036H Set Linear Speed
0037H Output Power
0038H PID Feedback Quantity (% )
0039H PID Input Quantity (% )
003AH Set Length
003BH Actual Length
003CH External Count Value
003D-003FH (Reserved)
0040-004AH Terminal State, 0040H-004AH corresponding to BIT0-BITA bit of 002BH in order
004B-00FEH (Reserved)
List of Modbus Register Addresses:
Function Code Form ParameterCode(DEC) Modbus Register Address(HEX)
(Saving Confirmed) (00FFH)
(Command Data) (0001H~001FH)
(Monitoring Content) (0020H~004FH)
P0.00~P0.19 0100H~ 0113H*
P1.00~P1.23 0200H~ 0217H
P2.00~P2.50 0300H~ 0332H
P3.00~P3.36 0400H~ 0424H
P4.00~P4.35 0500H~ 0523H
P5.00~P5.36 0600H~ 0624H
P6.00~P6.18 0700H~ 0712H
P7.00~P7.28 0800H~ 081CH
P8.00~P8.28 0900H~ 091CH
P9.00~P9.21 0A00H~ 0A15H
PA00~PA.30 0B00H~ 0B1EH
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 4 Use of MODBUS Communication
211
Function Code Form ParameterCode(DEC) Modbus Register Address(HEX)
Pb.00~Pb.08 0C00H~ 0C08H
PC.00~PC.23 0D00H~ 0D17H
Pd.00~Pd.34 0E00H~ 0E22H
PE.00~PE.12 0F00H~ 0F0CH
PF.00~PF.12 1000H~ 100CH
(For parameter extending) (1100H~FFFFH)
Modbus Address Encoding Method:Refer to the function codes in the function code form. High 8 bit HI= function group number + 1; low 8 bitLO= function code. Keep other register addresses that are not listed.
List of Abnormality Codes
AbnormalityCode Content
01H Command code errorCommand codes other than 03H, 08H and10H
02H
Register address errorNone of the register addresses is registeredRead the ENTER-confirmed special register[0X00FFH]The communication function of the address is not initiated in the function code setting. (Note1)
03HNumber errorNumber of data read or written is not between 1 and 16In the writing manner, the command data is not the bit number *2
21H Data setting errorUpper and lower limit error during the control data & parameters input·
22H
Writing manner errorWrite the non-revisable parameters or read-only parameters in operation (Note 2)Parameters write-protected (Note 3)Write data into the special read registerWrite in the case of CCF3, i.e. EEPROM fault
23H Write in the case of undervoltageWrite parameters in the case of Uu
24H Write parameters from communication during the parameter processingAt the time of fault resetting, system power supply cutoff or data saving
25H CRC check fault (Note 4)Note 1: Set the P0.03 and P0.04 frequency setting as serial communication (when writing address 0002) or set P0.07operation command control manner as serial communication (when writing address 0001).Note 2: For parameters that can be set in operation, please refer to the function parameter list. If a parameter thatcannot be revised in operation but can be revised at the time of stop is to be revised, please stop the inverter and thenrevise it.Note 3: When parameters are write-protected and PF.01 is set as 1 or 2, please revise it as 0. Then all parameters canbe revised.Note 4: In case of CRC 16 check fault, response will be given even if the system receiving is over, and 25H faultwill be reported to facilitate customer debugging.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 5 Keyboard Installation Dimension (Unit: mm)
212
Appendix 5 Keypad Installation Dimension (Unit: mm)
Figure A5-1 S2R4GB~3004GB Keypad Installation Dimension
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 5 Keyboard Installation Dimension (Unit: mm)
213
Figure A5-1 Keypad Installation Dimension for 35R5GB and the Above
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 6 LCD Keyboard Use Instruction
214
Appendix 6 LCD Keypad Use Instruction
A6.1 LCD Keypad Instruction
A6.1.1 View of LCD Keypad
LCD液晶显示中文: 2行,每行最
多7个汉字英文:2行,每行最
多14个字母
编程键
移位键
运行状态指示灯
运行键
数字编码器上升
点动键
停止键故障复位键
数字编码器下降
确定键
正反转切换键
RUN
PRGESC
>> ENTERJOG
STOPRESET
补偿前频率 50. 00 Hz
RUN FWD REV TRIPREMOTE
- +
Figure A6-1 LCD Keypad Arrangement and Name of Different Parts
For the LCD keypad and the LED keypad, display and arrangement of the operation keys and state indicator lightare the same, and the operation method & relevant functions are also the same. They only differ in that the LCDkeypad replaces the function of four-bit seven-segment LED digital tubes and three unit indicator lights of the LEDkeypad with the liquid crystal display.
A6.1.2 Instruction of Key FunctionLike the LED keypad, the LCD keypad is also provided with 9 keys, and the function definition of each key is thesame as that of the LED keypad. Details are showed in “Table 3-2 Keypad Key Functions” of Chapter III.
A6.1.3. LCD and Indicator Light InstructionThe LCD keypad is provided with an LCD area and 5 state indicator lights.The LCD area can display the state parameters, function code parameters and fault alarm codes etc of the frequencyinverter. When parameters are displayed, parameter names and parameter units are also displayed, i.e. functions of 3unit indicator lights in the keypad are included. Moreover, from the parameter name, a parameter can be judged asthe set parameter or the actual value, so they don’t have to be distinguished through unit flickering indication. Inaddition, for the LCD keypad, units are displayed in letters, so all unit indications can be displayed. For the specificdisplay content and manners in different states, please refer to the keypad display diagram below.Meaning of 5 state indicator lights for the LCD keypad is the same as that for the LED keypad. Please refer to“Table 3-3 State Indicator Light Instruction” in Chapter III LED Keypad Function & Operation.
A6.2 LCD Use Instruction
A6.2.1 Functional CharacteristicsThe LCD keypad is to let the user understand the function parameters displayed more clearly and definitely. With the
Forward/Reverse Switch Key
Operation Key
Shift Key
Programming Key
Liquid Crystal Display (LCD)Chinese: 2 lines, 7 Chinesecharacters at the most foreither lineEnglish: 2 lines, 14 letters atthe most for either line
Operation State Indicator Light
Digital Encoder Ascending
Digital Encoder Descending
Enter Key
Stop KeyFault Resetting Key
Jog Key
Pre-compensation Frequency
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 6 LCD Keyboard Use Instruction
215
Chinese instruction, the meaning of a function code can be displayed directly when the user doesn’t understand it.The keypad is connected with the frequency inverters of 35R5GB and the above. As for the functions, it iscompletely compatible with the LED keypad operation. The frequency inverter can be identified and displayedautomatically when connected to the keypad.For the LCD keypad, the function of function parameter copying is added, which can make parameters of severalfrequency parameters be set as the same. When several motors require the unified setting, only the parameters of onemotor have to be set, then be uploaded, and finally be downloaded in other frequency inverters. In this way,parameters of all frequency inverters can be reserved the same, and repeated setting of parameters is also avoided.During the parameter copying, all parameters are uploaded, but they can all be downloaded or just the non-motorparameters are downloaded.Notes:To prevent repeated copying as PF.03 is not 0 during the parameter uploading and downloading, PF.03 is set as 0during the parameter copying;Parameter uploading and downloading should be done on the same series of frequency inverters. Otherwise,downloading will fail.
A6.2.2 Display StepsWhen the LCD keypad is powered (connected), the display will be blank, which will last for about 2s, as the keypadjudgment and display initiation will be done. After all are ready, the keypad will enter the stop state display interface,after which operation of the LCD keypad can be carried out.
A6.2.3 Keypad Display StateDisplay states and switch manners of the LCD keypad are the same as those of the LED keypad, and what they meanare also the same. Only the display content and manners differ. The specific display content of different displaystates as well as the meanings &switch manners are showed in “3.1.4 Keypad Display State” of Chapter III. Below,the specific content of different display states for the LCD keypad is described with figures.The display states of keypad consist of the stop state parameter display, the operation state parameter display, thefault alarm display state and the function code parameter edition state display, etc.
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 6 LCD Keyboard Use Instruction
216
Frequency Inverter Stop and Operation State Display
图3 运行状态,RUN灯亮, 运行到设定频率 稳速时FWD恒亮
RUN
PRGESC
>> ENTERJOG
STOPRESET
补偿前频率 50.00 Hz
RUN FWD REV TRIPREMOTE
- +
图5 告警时,闪烁显示 告警字符
RUN
PRGESC
>> ENTERJOG
STOPRESET
告警:OLP2 过载预警
RUN FWD REV TRIPREMOTE
- +
图6 故障时,显示故障代码及故 障名,TRIP故障指示灯闪烁
RUN
PRGESC
>> ENTERJOG
STOPRESET
故障: OL2 变频器过载
RUN FWD REV TRIPREMOTE
- +
图3 运行状态,RUN灯亮, 加速中FWD指示灯快闪
RUN
PRGESC
>> ENTERJOG
STOPRESET
补偿前频率 30.00 Hz
RUN FWD REV TRIPREMOTE
- +
图1 上电初始化显示,补偿 前输出频率为0.00Hz
RUN
PRGESC
>> ENTERJOG
STOPRESET
补偿前频率 0. 00 Hz
RUN FWD REV TRIPREMOTE
- +
图2 停机状态,RUN灯熄灭 FWD慢闪指示设定方向
RUN
PRGESC
>> ENTERJOG
STOPRESET
补偿前频率 0. 00 Hz
RUN FWD REV TRIPREMOTE
- +
灭 亮
Figure A6-2 LCD Keypad: Display of Frequency Inverter Initiation, Stop, Operation, Alarm and Fault State
Figure 4 Operation state, RUN lightis on, and FWD is on constantly
when it operates to the set frequency
Figure 5 In the case of an alarm, the alarmcharacters are flickering and displayed
Figure 6 In the case of a fault, the faultcode and the fault name are displayed,
and TRIP fault indicator light isflickering
Pre-compensationFrequency50.00Hz
Alarm: OLP2Overload Pre-alarm
Fault: OL2Frequency Inverter
Overload
Figure 1 Power-on initiation display,the pre-compensation output frequency
is 0.00Hz
Figure 2 Stop state, RUN light is offand FWD is flickering slowly to
indicate the setting direction
Figure 3 Operation state, RUN light ison, and FWD indicator light is
flickering quickly during acceleration
Pre-compensationFrequency
0.00Hz
Pre-compensationFrequency
0.00 Hz
Pre-compensationFrequency30.00 Hz
Off On
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 6 LCD Keyboard Use Instruction
217
Function Code Edition State:
Figure A6-3 Programming Display State of LCD Keypad
Supplement: Special Interface Display
Figure A6-4 LCD Keypad: Special Interface Display and Meaning
A6.2.4 Keypad Operation MethodLike the LED keypad, with the LCD keypad, various operations can be conducted on the frequency inverter.Examples are followed:Monitoring Parameter Display Switch
补偿前频率 50.00 Hz
设定频率
输出电流
设定转速
运行转速
实际长度
>> >> >>>>>>>>
输出频率
(补偿前)
LED显示
按键操作
>>
输出频率
(实际)
LCD显示
50.00 50.00 50.00 1440 0.000
补偿后频率 50.00 Hz
输出电流 45.0 A
设定频率 50.00 Hz
运行转速 1440 rpm
设定转速 1440 rpm
实际长度 0.000 m
144045.0
Figure A6-5 LCD Keypad: Example of Monitoring Parameter Display Operation
Given Frequency Adjustment for Ordinary Operation (Change the Given Frequency from 50.00Hz into 40.00Hz)
停机显示输出频率
按旋钮自动进入给定频率修改状态,单位指示闪烁显示当前设定频率
向左旋转一次设定频率改变0.01Hz
连续旋转并保持旋转速率可使调整步长逐渐加大到0.10Hz
步长最大可到1Hz,到达设定值后,若需保存当前频率设定调整完频率后直接按ENTER键即保存
3s后自动退出返回初始显示状态
- - -
LCD显示
按键操作
-
停止旋转
补偿前频率 0.00 Hz
设定频率 50.00 Hz
设定频率 49.99 Hz
设定频率 49.50 Hz
设定频率 40.00 Hz
补偿前频率 0.00 Hz
Figure A6-6 LCD Keypad: Set Frequency Adjustment Operation
Pre-compensationFrequency50.00 Hz
Function Group: P0Basic Functions
Function Code: P0.02Frequency Digital Setting
Frequency Digital Setting50.00 Hz
PrimaryMenu
SecondaryMenu
TertiaryMenu
Edition State
Stop State ParameterDisplay or OperationState Parameter Displayor Fault Alarm Display
Option Parameter Display Communication Request Display Terminal State Display
Frequency Setting 1:01Keyboard Setting
CALLCommunication Request
Terminal StateOption Name
Parameter Nameand Option Value
KeyOperation
LED
LCD
OutputFrequency
(BeforeCompensation)
OutputFrequency(Actual)
OutputCurrent
SetFrequency
OperationRotatingSpeed
SetRotatingSpeed
ActualLength
Pre-compensationFrequency50.00 Hz
After-compensationFrequency50.00 Hz
Output Current45.0 A
Set Frequency50.00 Hz
Operation RotatingSpeed
1440 rpm
Set Rotating Speed1440 rpm
Actual Length0.000 m
Stop theinverteranddisplay theoutputfrequency
Press the knob to enterthe given frequencyrevision state; the unitindicator is flickeringand displaying thepresent set frequency
Turn left once tochange the setfrequency by 0.01Hz
Keep turning andmaintain the rotatingspeed to make theadjustment step lengthincrease to 0.10Hzgradually
The step length can reach 1Hz atthe most; after the set values isreached, if the present frequencysetting has to be saved, press thekey ENTER directly afterfrequency adjustment is over.
Stopturning
KeyOperation
LCDPre-compensation
Frequency0.00 Hz
Set Frequency50.00 Hz
Set Frequency49.99 Hz
Set Frequency49.50 Hz
Set Frequency40.00 Hz
Pre-compensationFrequency
0.00 Hz
It will escape 3slater and returnto the initialdisplay state
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 6 LCD Keyboard Use Instruction
218
Function Code Parameter Setting
停机参数显示状态
进入编辑状态,显示一级菜单
功能组确认,进入二级菜单
旋转1次选择功能码P2.01
功能码确认,进入三级菜单
向左旋转三次修改闪烁位参数 6→3
存储修改后的数值,退回二级菜单
按键操作
将闪烁位右移 2位,跳至最高位
退回一级菜单
向右旋转1次修改闪烁位参数 0→1
退出编辑状态
旋转2次选择功能组P2
PRGESC
ENTER >>PRGESC
PRGESC
ENTER+
+
+
-
LCD显示
功能码:P2.00 点动运行频率
补偿前频率 0.00 Hz
功能组:P0 基本功能
功能组:P2 辅助运行
功能码:P2.01 点动加速时间
功能组:P2 辅助运行
功能码:P2.02 点动减速时间
点动加速时间 6.0 s
点动加速时间 3.0 s
ENTERENTER
点动加速时间 1003.0 s
注:参数高位为0时,被修正不显示;参数编辑状态闪烁位移至该位时,¨„与空白字符交替显示,改变值为非零后,后续被修正位补零正常显示。
点动加速时间 ¨„ 3.0 s
Figure A6-7 LCD Keypad: Example of Parameter Edition Operation
A6.3 LCD Contrast Adjustment
When the user found the display contrast is poor, he or she can make adjustment via the combination key of the
keypad (shift key + digital encoder): turn the digital encoder - + when pressing the shift key >> ; if the
number increases, the contrast will be promoted; if the number decreases, the contrast will be reduced. There aretotally 5 shifts for the contrast adjustment. When the strongest contrast is reached through turning the encoder, thecontrast will not change any more and will keep the largest value, and vice versa.
Note: when the high bit of parameter is 0, the revised will not be displayed; when the parameter edition state flickering bitshifts to the bit, it will be displayed alternately with the blank characters; after the revised value is not 0, the bit revisedsuccessively will be displayed normally after supplemented with 0.
Escape from theEdition State
Return to thePrimary Menu
Save the revised valueand return to thesecondary menu
Turn right once andrevise the flickering-bitparameter 0-1
Shift the flickering bitby 2 bits and skip to thehighest bit
Turn left third time andrevise the flickering-bitparameter 6-3
Function Group: P2Auxiliary Operation
Function Code: P2.02Jogging Deceleration
Time
Jogging AccelerationTime
1003.0 s
Jogging AccelerationTime3.0 s
Jogging AccelerationTime3.0 s
StopParameterDisplay State
Enter the edition stateand display theprimary menu
Turn twice to selectfunction group P2
Confirm the functiongroup and enter thesecondary menu
Turn once to selectfunction code P2.01
Confirm the functioncode and enter thetertiary menu
LCD
KeyOperation
Pre-compensationFrequency
0.00 HzFunction Group: P0
Basic FunctionFunction Group: P2Auxiliary Operation
Function Code: P2.00Jogging Operation
Frequency
Function Code: P2.01Jogging Acceleration
Time
Jogging AccelerationTime6.0 s
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Appendix 7 Guarantee Sheet
219
Appendix 7 Frequency Inverter Warranty Card
Frequency Inverter Warranty CardName of User:
Address of User:
Contact Person: Tel.:
P.C.: Fax:
Type: Serial No.:
Date of Purchase: Date of Fault:
Fault Details
Motor: KW Pole Application of Motor:
Fault Occurrence Time: power supply no-load load % Others:
Fault Phenomena:
Fault Display: OC OL OU OH LU None Others:
Control Terminal Used:
Operation after Resetting:Yes No Output Voltage: Yes No
Total Working Time: Hrs Fault Frequency:
Installation Site Details
Power Voltage: U-V V, V-W V, W-U V
Transformer Capacity: KVA Frequency Inverter Earthing: Yes No
Distance from the Power Source: m Distance from the Motor: m
Vibration: No Medium Strong Dust: No Medium Much
Others:
Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india

Sparex India
Chennai - India, www.sparexindia.com, Email - [email protected], What's Up Mobile +91 9444032532, Skype: sparex_india








![[XLS] · Web view0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 7 2 0 0 0 0 0 0 0 0 0 0 0 5 4 0 0 0 0 0 0 0 0 0 0 0 5 4 0 0 0 0 0 0 0 0 0 0 0 5 4 0 0 0 0 0 0 0 0 0 0 0 5 4 0 0 0 0](https://static.fdocuments.in/doc/165x107/5aad015d7f8b9a8d678d9907/xls-view0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-7-2-0-0-0-0-0-0-0-0-0.jpg)