21st Annual ARC Event Program May 20-21, 2015...
16
A 3cell = - 1 Rccc 1 Rccc 0 0 0 0 1 Rccs -( 1 Rccs + 1 Rucs + 1 Rcccs ) 0 1 Rcccs 0 0 0 0 - 1 Rccc 1 Rccc 0 0 0 1 Ru 2 cf cs + 1 Rcccs 1 Rccs -( 1 Rucs + 1 Rccs + 2 Rcccs ) 0 1 Rcccs 0 0 0 0 - 1 Rccc 1 Rccc 0 1 R2 ucf cs (1 - 1 Rucf ) 0 1 Ru 2 cf cs + 1 Rcccs 1 Rccc -( 1 Rccs + 1 Rucs + 1 Rcccs ). A 3cell = - 1 Rccc 1 Rccc 0 0 0 0 1 Rccs -( 1 Rccs + 1 Rucs + 1 Rcccs ) 0 1 Rcccs 0 0 0 0 - 1 Rccc 1 Rccc 0 0 0 1 Ru 2 cf cs + 1 Rcccs 1 Rccs -( 1 Rucs + 1 Rccs + 2 Rcccs ) 0 1 Rcccs 0 0 0 0 - 1 Rccc 1 Rccc 0 1 R2 ucf cs (1 - 1 Rucf ) 0 1 Ru 2 cf cs + 1 Rcccs 1 Rccc -( 1 Rccs + 1 Rucs In accordance with Cooperative Agreement W56HZV-14-2-0001 U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC) Organized by the Automotive Research Center A U.S. Army Center of Excellence for Modeling and Simulation of Ground Vehicles W PLQ 7 R & This event is free of charge Register at arc.engin.umich.edu Inquiries (734) 764-6579 [email protected] Venue Chesebrough Auditorium Chrysler Center, North Campus The University of Michigan 2121 Bonisteel Ann Arbor, MI 48109 -2092 8:00 Welcome Prof. Bogdan Epureanu, ARC Associate Director 8:05 Insights in TARDEC’s Research Portfolio and Needs Introduction by: Mr. Jeff Jaczkowski, Assistant Chief of Staff, External Business Office, TARDEC Mr. Steve Knott, Deputy Executive Director, Simulation, Integration & Engineering, U.S. Army TARDEC 8:45 Technical Sessions 1 1A: Vehicle Dynamics & Controls, and Human Centered Modeling 1B: Vehicle Hybridization & Electrification – Energy Storage 10:00 Networking Break 10:35 Technical Sessions 2 2A: Structures and Materials / Optimization and Reliability 2B: Internal Combustion Engines and Fuels 12:45 pm Closing Remarks and Award Presentation Dr. David Gorsich, Chief Scientist, U.S. Army TARDEC 1:15 - 2:30 Post Review Networking 8:00 Welcome & Introductions Prof. Anna Stefanopoulou, ARC Director Dr. Jennifer Hitchcock, Executive Director, Research and Technology Integration, TARDEC 8:10 The Future of Army Mobility Dr. David Gorsich, Chief Scientist, U.S. Army TARDEC 8:45 Case Study 1: No driver? No problem: Mobility Across the Autono- my Spectrum in Unmanned Ground Vehicles 9:30 The University of Michigan Mobility Transformation Center Dr. James Sayer, Deployment Director, MTC 10:00 Networking Break 10:45 Keynote Dr. Robert Ambrose, Division Chief, Software, Robotics & Simulation, Johnson Space Center - NASA Dr. Hubertus Tummescheit, CEO, Modelon 12:00 pm Lunch 1:30 Keynote Dr. Chris Atkinson, Program Director, ARPA-E 2:00 Case Study 2: Multi-objective Optimization and Thermal Management of the Vehicle Power System 2:45 Technology Transfer Highlights in Thrust Area 3 Dr. David Lamb, Senior Technical Expert, U.S. Army TARDEC Prof. K. K. Choi, University of Iowa Prof. Nick Vlahopoulos, University of Michigan 3:15 - 5:30 Poster Session & Networking Day 1: Wednesday, May 20, 2015 Day 2: Thursday, May 21, 2015 RSVP by May 5, 2015
Transcript of 21st Annual ARC Event Program May 20-21, 2015...

A 3cell =
− 1Rccc
1Rccc
0 0 0 01
Rccs−( 1
Rccs+ 1
Rucs+ 1
Rcccs) 0 1
Rcccs0 0
0 0 − 1Rccc
1Rccc
0 00 1
Ru2c f cs
+ 1Rcccs
1Rccs
−( 1Rucs
+ 1Rccs
+ 2Rcccs
) 0 1Rcccs
0 0 0 0 − 1Rccc
1Rccc
0 1R2
uc f cs(1− 1
Ruc f) 0 1
Ru2c f cs
+ 1Rcccs
1Rccc
−( 1Rccs
+ 1Rucs
+ 1Rcccs
).
(20)
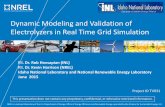
Figure 11. OBSERVABILITY OF THE SAME SENSOR LOCATIONSUNDER DIFFERENT CONDITIONS
Table 3. NUMBER OF SENSOR POSITION COMBINATIONS GIVINGFULL OBSERVABILITY FOR A STRING WITH 12 CELLS AND 4 SEN-SORS
Conditions No. of combinations
giving full observability
Full interconnection 106/495
Natural convection 52/495
No cell to cell conduction 1/495
ditions under different scenarios, and the conclusion is summa-rized in Table 3. The minimum number of sensors that gives fullobservability is 4.
As shown in Table 3, among all the 495 combinations of4 sensor locations in a cell string of 12, if there is both circu-lated coolant convection and cell to cell conduction, referred toas full interconnection in Table 3, 106 combinations will givefull observability. Under natural convection, where the coolantis not flowing between cells, only 52 combinations can satisfy
full observability condition. When the cell to cell conduction ismissing, only 1 combination yields full observability. That com-bination would be placing the sensors at the 3th, 6th, 9th and12th cells. The sensors are actually evenly distributed along thecluster, which agrees with intuition.
Of the two modeled thermal interconnections between cells,namely the cell to cell heat conduction and the heat convectionthrough the coolant flow, the former tends to have larger impacton the observability of the pack model. This may be related tothe fact that the cell to cell heat conduction is a two-way inter-action, where the two adjacent cells can transfer heat betweeneach other. But the heat convection through the coolant flow issingle directional, and only the previous cells along the coolantflow direction will affect the latter ones.
Consequently, greater cell to cell heat conduction will be fa-vored by the observability of the pack model. It is noted thatgreat cell to cell heat conduction can also reduce the temperaturegradient between cells in the pack and thus help contain the im-balance between cells induced by temperature non-uniformity.However, on the negative side, in case of a single cell thermalfailure, e.g. local overheating, the great cell to cell heat conduc-tion will facilitate the spread of such failure to other cells in thepack. This is not desirable from the safety perspective.
8 ConclusionIn this paper, an online parameterization methodology for a
lumped thermal model of a cylindrical lithium ion battery cellhas been proposed, designed and verified by simulation. By us-ing online parameterization algorithm, the lumped parameters ofthe thermal model, which cannot be easily measured or calcu-lated otherwise, can be automatically identified based on the cur-rent excitation of a real drive cycle and the resultant battery sur-face temperatures. The identified parameters and the measuredcell surface temperature are adopted by an adaptive observer toestimate the unmeasurable core temperature of the cell. The esti-mated core temperature can be used as a more useful and criticalreference for the on-board thermal management system and eventhe vehicle power management system. The next step will be tovalidate the model and the methodology with experiments. Overthe battery lifetime, such online identification scheme can be re-set on a monthly or yearly basis to track varying parameters due
A 3cell =
− 1Rccc
1Rccc
0 0 0 01
Rccs−( 1
Rccs+ 1
Rucs+ 1
Rcccs) 0 1
Rcccs0 0
0 0 − 1Rccc
1Rccc
0 00 1
Ru2c f cs
+ 1Rcccs
1Rccs
−( 1Rucs
+ 1Rccs
+ 2Rcccs
) 0 1Rcccs
0 0 0 0 − 1Rccc
1Rccc
0 1R2
uc f cs(1− 1
Ruc f) 0 1
Ru2c f cs
+ 1Rcccs
1Rccc
−( 1Rccs
+ 1Rucs
+ 1Rcccs
).
(20)
Figure 11. OBSERVABILITY OF THE SAME SENSOR LOCATIONSUNDER DIFFERENT CONDITIONS
Table 3. NUMBER OF SENSOR POSITION COMBINATIONS GIVINGFULL OBSERVABILITY FOR A STRING WITH 12 CELLS AND 4 SEN-SORS
Conditions No. of combinations
giving full observability
Full interconnection 106/495
Natural convection 52/495
No cell to cell conduction 1/495
ditions under different scenarios, and the conclusion is summa-rized in Table 3. The minimum number of sensors that gives fullobservability is 4.
As shown in Table 3, among all the 495 combinations of4 sensor locations in a cell string of 12, if there is both circu-lated coolant convection and cell to cell conduction, referred toas full interconnection in Table 3, 106 combinations will givefull observability. Under natural convection, where the coolantis not flowing between cells, only 52 combinations can satisfy
full observability condition. When the cell to cell conduction ismissing, only 1 combination yields full observability. That com-bination would be placing the sensors at the 3th, 6th, 9th and12th cells. The sensors are actually evenly distributed along thecluster, which agrees with intuition.
Of the two modeled thermal interconnections between cells,namely the cell to cell heat conduction and the heat convectionthrough the coolant flow, the former tends to have larger impacton the observability of the pack model. This may be related tothe fact that the cell to cell heat conduction is a two-way inter-action, where the two adjacent cells can transfer heat betweeneach other. But the heat convection through the coolant flow issingle directional, and only the previous cells along the coolantflow direction will affect the latter ones.
Consequently, greater cell to cell heat conduction will be fa-vored by the observability of the pack model. It is noted thatgreat cell to cell heat conduction can also reduce the temperaturegradient between cells in the pack and thus help contain the im-balance between cells induced by temperature non-uniformity.However, on the negative side, in case of a single cell thermalfailure, e.g. local overheating, the great cell to cell heat conduc-tion will facilitate the spread of such failure to other cells in thepack. This is not desirable from the safety perspective.
8 ConclusionIn this paper, an online parameterization methodology for a
lumped thermal model of a cylindrical lithium ion battery cellhas been proposed, designed and verified by simulation. By us-ing online parameterization algorithm, the lumped parameters ofthe thermal model, which cannot be easily measured or calcu-lated otherwise, can be automatically identified based on the cur-rent excitation of a real drive cycle and the resultant battery sur-face temperatures. The identified parameters and the measuredcell surface temperature are adopted by an adaptive observer toestimate the unmeasurable core temperature of the cell. The esti-mated core temperature can be used as a more useful and criticalreference for the on-board thermal management system and eventhe vehicle power management system. The next step will be tovalidate the model and the methodology with experiments. Overthe battery lifetime, such online identification scheme can be re-set on a monthly or yearly basis to track varying parameters due
In accordance with Cooperative Agreement W56HZV-14-2-0001
U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC)
Organized by theAutomotive Research Center
A U.S. Army Center of Excellence for Modelingand Simulation of Ground Vehicles
College of Engineering
This event is free of charge Register at
arc.engin.umich.edu
Inquiries(734) 764-6579
VenueChesebrough Auditorium
Chrysler Center, North CampusThe University of Michigan
2121 BonisteelAnn Arbor, MI 48109 -2092
21st Annual ARC PROGRAM REVIEW
May 20-21, 2015
8:00 WelcomeProf. Bogdan Epureanu, ARC Associate Director
8:05 Insights in TARDEC’s Research Portfolio and NeedsIntroduction by: Mr. Jeff Jaczkowski, Assistant Chief of Staff, External
Business Office, TARDECMr. Steve Knott, Deputy Executive Director, Simulation, Integration &
Engineering, U.S. Army TARDEC
8:45 Technical Sessions 11A: Vehicle Dynamics & Controls, and Human Centered Modeling1B: Vehicle Hybridization & Electrification – Energy Storage
10:00 Networking Break
10:35 Technical Sessions 22A: Structures and Materials / Optimization and Reliability 2B: Internal Combustion Engines and Fuels
12:45 pm Closing Remarks and Award PresentationDr. David Gorsich, Chief Scientist, U.S. Army TARDEC
1:15 - 2:30 Post Review Networking
8:00 Welcome & IntroductionsProf. Anna Stefanopoulou, ARC DirectorDr. Jennifer Hitchcock, Executive Director, Research and Technology
Integration, TARDEC
8:10 The Future of Army MobilityDr. David Gorsich, Chief Scientist, U.S. Army TARDEC
8:45 Case Study 1: No driver? No problem: Mobility Across the Autono-my Spectrum in Unmanned Ground Vehicles
9:30 The University of Michigan Mobility Transformation CenterDr. James Sayer, Deployment Director, MTC
10:00 Networking Break
10:45 KeynoteDr. Robert Ambrose, Division Chief, Software, Robotics & Simulation,
Johnson Space Center - NASADr. Hubertus Tummescheit, CEO, Modelon
12:00 pm Lunch
1:30 KeynoteDr. Chris Atkinson, Program Director, ARPA-E
2:00 Case Study 2: Multi-objective Optimization and Thermal Management of the Vehicle Power System
2:45 Technology Transfer Highlights in Thrust Area 3Dr. David Lamb, Senior Technical Expert, U.S. Army TARDECProf. K. K. Choi, University of IowaProf. Nick Vlahopoulos, University of Michigan
3:15 - 5:30 Poster Session & Networking
Day 1: Wednesday, May 20, 2015
Day 2: Thursday, May 21, 2015
Event Program
RSVP by May 5, 2015

21ST ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW SPEAKER INFORMATION
DR. JENNIFER HITCHCOCK was appointed to the Senior Executive Service in January 2011 as the Executive Director for Research and Technology Integration (RTI) at the U.S. Army Research Development and Engineering Command (RDECOM) Tank Automotive Research Development and Engineering Center (TARDEC). She brings more than 21 years of technical leadership and managerial experience in mobility and power and energy technologies, systems engineering, acquisition and program management.
Dr. Hitchcock served as the Acting Director of RTI from April 2010 until her official appointment to the SES and RTI Director in Jan. 2011. She is responsible for leading the research and integration of Army
ground vehicle mobility, power and energy, survivability, robotic and vehicle electronic architecture technologies. She is responsible for ensuring concepts, analytics, analysis and system simulation are completed for all ground vehicle technology integration to drive system integration solutions to meet emerging Army battlefield challenges. She leads more than 500 associates in five technical business areas, and is the executive responsible for the planning, execution, funding and selection of technology programs the Army will pursue to align and transition to acquisition programs.
DR. DAVID J. GORSICH was selected for a Scientific and Professional (ST) position in January 2009 and serves as the Army’s Chief Scientist for Ground Vehicle Systems, with a technical specialization in Modeling and Simulation (M&S). His current research interests are vehicle dynamics and structural analysis, vehicle design/optimization, reliability, underbody blast analysis, terrain modeling, spatial statistics, systems engineering methodologies and accreditation/validation of simulation methods. Prior to his current role as the Chief Scientist at TARDEC, he served in various positions of progressing responsibility in TARDEC, such as Acting Director for the Strategic Plans and Programs Office, Associate Director for Modeling and Simulation, Team Leader in Robotics and Vehicle Intelligence, among others.
He also worked on assignments in Army Materiel Command (AMC), Secretary of the Army for Research, Development and Acquisition (SARDA) and the Army Research Laboratory (ARL). In recognition of his service, he was awarded several Commander’s Coins and the Commander’s Award for Civilian Service in 2003. Dr. Gorsich is a Fellow of the Society of Automotive Engineers (SAE), and serves on the SAE Board of Directors, and Standards, and is Associate Editor for several highly respected technical journals, such as American Society of Mechanical Engineers ASME Journal of Mechanical Design, International Journal of Terramechanics, and International Journal for Reliability and Safety. He has published extensively with more than 150 conference and journal articles, including more than 50 articles in peer-reviewed journals, such as Transactions of SAE, International Journal of Vehicle Design, Journal of Mechanical Design, Institute for Electrical and Electronics Engineers Transactions on Pattern Analysis and Machine Intelligence, Contemporary Mathematics, Physical Review, among others. He recently co-authored a book called “The TARDEC Story: Sixty-five Years of Innovation” which traces the evolution of innovation in TARDEC to its current position as the center of excellence for ground vehicle development and integration in the U.S. Army. He received his Ph.D. in Applied Mathematics from the Massachusetts Institute of Technology in 2000, his M.S. degree in Applied Mathematics from George Washington University in 1994 and
his B.S. degree in Electrical Engineering from Lawrence Technological University in 1990.
DR. JAMES R. SAYER is a research scientist in the Human Factors Group at the University of Michigan Transportation Research Institute where he has conducted both basic and translational research in the areas of driver assistance and advanced safety systems development, naturalistic driving behavior, driver distraction, driver vision, and pedestrian conspicuity since 1993. He earned a Ph.D. and an M.S. in industrial and systems engineering from Virginia Polytechnic Institute and State University, Human Factors Option, and a B.S. in psychology from the University of Michigan.
Dr. Sayer currently serves as the project manager of the Connected Vehicle Safety Pilot Model Deployment, a U.S. Department of Transportation-sponsored program to demonstrate connected-
vehicle technologies in a real-world, multimodal environment. The results of the Safety Pilot Model Deployment will be used by the U.S. DOT to determine driver acceptance for, and evaluate the feasibility, scalability, security and device interoperability of connected-vehicle technologies.
In the area of driver assistance systems Dr. Sayer has contributed to the development, evaluation, and deployment of adaptive cruise control, collision warning, and collision avoidance systems in both passenger cars and commercial trucks (including simulator, test-track, on-road, and field-operational testing). He has overseen the conduct of four field

21ST ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW operational tests involving several hundred drivers, accumulating over 1.2 million miles of naturalistic driving data. In the area of driver distraction Dr. Sayer has conducted research on the effects of cell phones and other secondary behaviors on driving performance, the frequency of secondary tasks, and driver self-regulation. His research interests related to driver vision include the effects of hydrophobic and hydrophilic glass coatings, window tinting, and defrosters/defoggers on visual performance and driving behavior. On the topic of pedestrian conspicuity Dr. Sayer has performed multiple research studies concerning the effects of retroreflective markings and safety garment design on the detection of pedestrians, emergency responders and road construction workers.
DR. ROBERT AMBROSE received his Ph.D. from the University of Texas at Austin in Mechanical Engineering. He received his M.S. and B. S. degrees from Washington University in St. Louis. Dr. Ambrose currently serves as the Division Chief of the Software, Robotics and Simulation Division at NASA’s Johnson Space Center in Houston Texas, USA. The SR&S Division is responsible for flight spacecraft software, space robotics and system simulations for human spaceflight missions. Within the Division are five Branches responsible for managing on-orbit robotic systems for the International Space Station, development of software for the Multi Purpose Crew Vehicle and future Human Spaceflight systems, simulations for engineering development and training, hardware and software
GFE, hardware in the loop facilities for anomaly resolution and crew training, and the technology Branch for development of new robotic systems. Dr. Ambrose also serves as a Principal Investigator for NASA’s Office of Chief Technologist (OCT), overseeing research performed in the Human-Robotics Systems Project and other new starts. He co-chairs the OCT Robotics, Tele-Robotics and Autonomous Systems roadmap team for the agency’s technology program, and is the robotics lead for the agency’s human spaceflight architecture study teams. Working with the Office of Science and Technology Policy (OSTP), Dr. Ambrose is the Technical Point of Contact for NASA’s collaboration in the National Robotics Initiative (NRI). He is married to Dr. Catherine G. Ambrose and lives in Houston Texas.
DR. HUBERTUS TUMMESCHEIT is the Chief Executive Officer of Modelon Inc., and one of the founders of Modelon AB.
Dr. Tummescheit received his MSc in Mechanical Engineering from the Technical University of Hamburg Harburg, Germany in 1996, and his PhD in Automatic Control from the University of Lund, Sweden in 2002. He has been involved in the Design of the Modelica language from the beginning and is the developer of a number of open source and commercial Modelica Libraries. In 2003 he worked as a research scientist at United Technologies Research Center and returned to Sweden in 2004 to start Modelon AB, the first company fully dedicated to tools and services based on Modelica. Modelon has since grown to a global company with offices in Sweden, Germany, Japan and the US, and is a thought
leader in the area of model based engineering based on open standards. Dr. Tummescheit is active in the steering committee for the Functional-Mockup-Interface standard definition, and is a board member of the Modelica Association.
Dr. Tummescheit has served as the CEO of Modelon AB from 2004 to 2012 and moved to Hartford, Connecticut in 2013 to establish Modelon as a leading player in system simulation in the United States.
DR. CHRIS ATKINSON currently serves as a Program Director at the Advanced Research Projects Agency-Energy (ARPA-E). His focus at ARPA-E includes improving the energy efficiency of advanced combustion devices, and energy conversion and storage systems. Prior to joining ARPA-E, Dr. Atkinson founded an advanced engine technology consultancy that performed research, development, and product commercialization in the areas of engine control and calibration, fuel efficiency improvement, exhaust emissions reduction, alternative fuel utilization, and hybrid electric vehicle development. Before that, Dr. Atkinson held the rank of tenured professor in mechanical and aerospace engineering at West Virginia University. He has conducted research on behalf of a number of government agencies and
automotive companies, has authored over 110 peer-reviewed publications and presentations, and holds one US patent. He has received awards for research and teaching from the American Society of Mechanical Engineering, the Society of Automotive Engineers, and the National Science Foundation. For several years, Dr. Atkinson was a member of the advisory board of a major international engine academic research center, in addition to advising a start-up company.
He holds the degrees of B.Sc. in Chemical Engineering from the University of Natal, South Africa, M.S. in Mechanical Engineering from West Virginia University, and Sc.D. in Mechanical Engineering from MIT, with an emphasis in thermal sciences.

21ST ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
MR. STEVE KNOTT currently serves as the Deputy Executive Director for Systems Engineering at the Tank Automotive Research, Development and Engineering Center (TARDEC). He is responsible for leading the strategic direction and execution of TARDEC’s core competencies of Systems Engineering, Analytics, Physical Simulation & Test, Advanced Concepts, and Technical Planning. From 2007 to 2013, Mr. Knott served as the Associate Director for Ground System Survivability in TARDEC’s Research and Technology Integration (RTI) business area. During this assignment, he guided the Research and Development (R&D) investments for platform integration and acquisition program transition in the areas of armor development, blast mitigation, occupant protection, hit avoidance, laser protection, fire
protection, and mechanical countermine. From 2004 to 2007, Mr. Knott served as the Project Manager for Long Term Armor Strategy (LTAS) under the Program Executive Office for Combat Support and Combat Service Support (CS&CSS). In this position, Mr. Knott had overall responsibility for the development, manufacturing, qualification testing and production of new armored cabs for the FMTV & HEMTT tactical wheeled vehicle fleet. From 1997 to 2004, Mr. Knott was the Program Manager for the Special Programs Office in TARDEC’s Research Business Group. He led all R&D and Test and Evaluation (T&E) of integrated survivability suites for current and future force combat and tactical systems. During his 25-year career with the Army, Mr. Knott has also served as the Chief Engineer for the Program Manager Advanced Technology Program, an Army ACAT II program, focused on developing the Army’s next advanced scout vehicle. As a project engineer for TARDEC’s Emerging Systems Division, he was responsible for hydraulic systems engineering and advanced mobility systems analysis. Prior to his government service, Mr. Knott spent 6 years in private industry as a manufacturing engineer designing rapid/agile manufacturing systems. Mr. Knott holds a B.S. and M.S. in Mechanical Engineering from Wayne State University. He is also Level III-certified in three Army Acquisition Career Fields: Program Management; Systems Planning, Research, Development & Engineering; and Test & Evaluation.
AWARDS COMMITTEE
MS. JILLYN ALBAN is currently an Electrical Engineer at the U.S Army Tank Automotive Research, Development and Engineering Center (TARDEC). She is working with the Ground Domain Planning and Integration group to develop the 30-year strategy and funding associated to the prioritization within the strategy.
Prior to joining the GDPI team, Ms. Alban represented TARDEC as a Liaison Officer at Office of Assistant Secretary of the Army (Acquisitions Logistics and Technology) where she was responsible for any TARDEC related occurrence within Army Headquarters. She then moved to the Office of Secretary of Defense to engage with the tri-service ground vehicle related efforts focusing on the ground vehicle platforms going
through the DoD acquisition cycle and energy and power technology development. Her final assignment in Washington DC was with the Office of Naval Research (ONR) serving as a project engineer in Expeditionary Maneuver Warfare and Combating Terrorism Department. At ONR she focused on the Survivability, Advanced Mobility and Maneuver Enablers within the Maneuver Thrust.
Ms. Alban has a B.S. in Electrical Engineering and a M.S. in Engineering Management from Oakland University as well. She received the Army Research and Development Achievement Award for Ground Vehicle Control Aids for Improved Mobility with Indirect Vision, Drive-By Wire Crew Stations. She is also an Army Acquisition Corps Member.
DR. BOGDAN EPUREANU is a professor of Mechanical Engineering, University of Michigan. He obtained his Ph.D. in Mechanical Engineering at Duke University, 1999; Graduate Studies at University of Valladolid, 1994; M.S. in Mechanical Engineering at Galati University, 1993; and Graduate Studies at École Nationale Supérieure des Mines de Paris, 1992. His research interests include structural health monitoring and sensors based on nonlinear dynamics and chaos, linear and nonlinear reduced order models, pattern formation and control of chaos, computer fluid dynamics of unsteady flows, and nonlinear unsteady aerodynamics. Dr. Epureanu is the chair of this year’s Awards Committee.

21ST ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
DR. THOMAS MEITZLER received his B.S. and M.S. in Physics from Eastern Michigan University, completed graduate coursework at the Univ. of Michigan, and received a Ph.D. in Electrical Engineering from Wayne State University in Detroit. His doctoral dissertation in Electrical Engineering at Wayne State Univ. was on Modern Methods for Computing the Probability of Target Detection in Cluttered Environments. During the time from 1988 to present, Dr. Meitzler has been a research engineer at the US Army TACOM Research and Engineering Center (TARDEC) in Survivability. For the U.S. Army, Dr. Meitzler has been involved with the validation, verification, and development of electro-optical and human visual acquisition models and atmospheric simulation. Dr. Meitzler was the principal scientist of
the TARDEC Visual Perception Laboratory and the principal investigator on a CRADA with GM and Ford M.C. to apply visual acquisition models to vehicle conspicuity and novel sensors to automobile 360 degree safety. Dr. Meitzler has been the lead on several CRADA’s with NASA’s Kennedy Space Center and with the Columbia University College of Physicians and Surgeons. He has authored/co-authored many papers in the area of Electro Optic system simulation and visual detection, sensor validation, and non-destructive testing and evaluation of armor materials.
Dr. Meitzler is currently developing and integrating technologies for embedded health monitoring, armor NDE and embedded signal detection His research interests include infrared sensor characterization, non-destructive testing, nano electronics, and spintronics. Dr. Meitzler proposed a method for embedded armor health assessment that involves piezoelectric transducers and nano electronics and built a laboratory around that idea. Dr. Meitzler is a Survivability Senior Technical Expert.
MR. MARK RUPERSBURG currently works in Technology Business Development at General Dynamics Land Systems (GDLS), a company he joined in 2004. He supports the pursuit of advanced programs and develops collaborative relationships with outside businesses, universities, and other resources. He works with internal programs to help identify enabling technologies and emerging technologies for creating break-through new products.2 Mr. Rupersburg holds a Bachelor’s degree in Mechanical Engineering from Wayne State University (1979) and undertook graduate studies in Mechanical Engineering, Dynamics at Stanford University (1982-1983). He previously founded two companies Simulation Dynamics (1985-1994) and Emerging Technologies (1994-2004). Mr. Rupersburg serves on
the Business Advisory Board at the Macomb-Oakland University INCubator which provides entrepreneurial resources, business solutions and proactive support to businesses in an effort to help startups on their path to success. He is also on the Industry Process Control Board (IPCB), and the Education Subcommittee of Lightweight Innovations for Tomorrow (LIFT), a public-private partnership that will develop and deploy lightweight materials-manufacturing technologies, and implement education and training programs to prepare the workforce.
DR. RAVI THYAGARAJAN serves as Deputy Chief Scientist at the U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC), and was selected to the Researcher Review Board as a Senior Technical Specialist in June 2012. His research pursuits are in the areas of underbody blast modeling and design, occupant protection and fast-running modeling methodologies. He received his Ph D in Applied Mechanics from Caltech in 1990, and has over 15 years of prior experience in the automotive industry at Ford and Visteon. He is a past recipient of the Forest R. McFarland Award from SAE, holds two patents and has co-authored over 40 technical papers.
DR. LAURENCE TOOMEY received his B.S. in Chemistry from State University of New York, College at Fredonia in 1992 and Ph.D. in Chemistry from State University of New York, University at Buffalo in 1997. He joined US Army, Tank Automotive Research Development Engineering Center (TARDEC) in Warren, Michigan in January 2010 where he works as an engineer on the Energy Storage team in the Ground Vehicle Power & Mobility Directorate. He currently manages multiple programs focusing on the development of advanced battery systems for military vehicle platforms. Prior to TARDEC, he held the position of R&D Manager at Cobasys, Inc./SB LiMotive in Orion, Michigan developing NiMH and Li-ion battery systems for hybrid automotive applications. He also held a position of Senior Scientist at
Lithium Energy Associates, Inc. in Waltham, MA developing advance Li metal batteries for military applications. His research interests include materials research to improve energy density, performance and safety characteristics of advanced energy storage technologies.

21
ST AUTOMOTIVE RESEARCH CENTER ANNUAL PROGRAM REVIEW
CASE STUDY ABSTRACTS
CASE STUDY 1
No Driver? No Problem: Mobility Across the Autonomy Spectrum in Unmanned Group Vehicles
Unmanned ground vehicles (UGVs) of all sizes are invaluable assets for the Army. The Army has used more than
7,000 ground robots to date to secure the battlefield and autonomy-enabled systems are a key element of TARDEC’s 30-
year strategy. UGVs also have significant commercial potential. Ground robots can already help with performing tasks
ranging from cleaning floors to handling warehouse materials, and the race for developing and deploying self-driving cars
is heating up.
When it comes to the level of autonomy of UGVs, there is a whole spectrum ranging from teleoperated vehicles with
no autonomy to fully autonomous vehicles that rely on on-board sensors and controllers only. Every level of autonomy has
its own advantages and challenges in terms of mobility, and understanding and improving each level’s mobility
capabilities is crucial for the successful design and appropriate selection of UGV operating modes.
This case study will highlight ongoing collaborative efforts in the ARC between academia, TARDEC, and industry to
understand and push the boundaries of level-of-autonomy versus mobility trade-offs. Three vehicle platforms (Superdroid,
mini Baja, and HMMWV) will be considered along with three modes of operation (teleoperation, shared control, and full
autonomy). Efforts that will be highlighted include (i) robust compensation of delays in teleoperation; (ii) increasing the
haptic scene analysis capability of human operators in shared control mode; (iii) identifying the best strategies to reconcile
human and controller inputs in shared control; (iv) full autonomy in unstructured environments without a priori
information; (v) cognitive modeling of human operators; and (vi) the role of model fidelity in simulation based evaluations
of UGV technologies.
Contributors:
Faculty: Drs. Tulga Ersal, Dawn Tilbury, Brent Gillespie, Jeffrey Stein (UM)
Students: Jiechao Liu, Yingshi Zheng, Justin Storms, Paul Boehm (UM)
TARDEC: Drs. Paramsothy Jayakumar, James Poplawski, Jaisankar Ramalingam
Industry: Dr. Mitchell Rohde (Quantum Signal)
Q & A moderated by Mr. Dave Gunter, Deputy Associate Director, Analytics, U.S. Army TARDEC
CASE STUDY 2
Multi-Objective Optimization and Thermal Management of the Vehicle Power System
Military vehicles have to face many challenges in modern warfare in order to fulfill their mission, of which
energy consumption and thermal management are only a few. In our case study, we will address these by developing a
unified, multi-physics hybrid electric vehicle simulation tool for the next-generation of military trucks. Our approach
has been enhanced with the addition of (a) a finite element electric machine model, (b) a holistic cooling system design
and control for the electrified powertrain, and (c) a high-fidelity battery aging model. The new capabilities will enable
development of a framework for a multi-variable, multi-objective optimization of the Vehicle Power System (VPS),
with consideration of typical military duty cycles.
Main highlights include: (i) Computationally-efficient electromagnetic and thermal models for electric machines.
Through the use of the model order reduction and scaling techniques, new electric machine models can be quickly
generated. These models are fast enough to be used in powertrain design and controls development and enable judging the
tradeoffs between best performance, high efficiency and heat rejection. (ii) A holistic supervisory thermal management is
proposed to simultaneously track the prescribed temperatures inside the battery pack, e-motors, and the IC engine coolant
and to minimize the auxiliary loses. (iii) Overall vehicle performance is evaluated through an implementable control
strategy for VPS which allows dealing with multiple criteria including complex mechanisms of battery fading.
Contributors:
Faculty: Drs. Andrej Ivanco, John Wagner (CU), Heath Hofmann (UM), Zoran Filipi (CU)
Students: Xinran (William) Tao (CU), Kan Zhou (UM), Xueyu Zhang (CU)
TARDEC: Dr. Denise Rizzo
Industry: Dr. Xiao Hu (ANSYS, Inc.)
Q & A moderated by Dr. Mark Brudnak, Senior Technical Expert, Physical Simulation & Test, TARDEC

May 21 1A: Vehicle Dynamics & Controls, and Human Centered Modeling Session Leads: Dr. Paramsothy Jayakumar, Dr. Amandeep Singh
Location: Chesebrough Auditorium
1B: Vehicle Hybridization & Electrification – Energy Storage Session Leads: Dr. Denise Rizzo, Dr. Yi Ding
Location: Chrysler Center, Room 133
8:45 Flexible Multibody Dynamics Approach for Tire Dynamics Simulation PI: Hiroyuki Sugiyama
Nano-Materials Design for Enhanced Thermal and Mechanical Properties PI: Levi Thompson
9:10 A Hybrid Soft Soil Tire Model (HSSTM) for Vehicle Mobility and Performance Analysis in Terramechanics Applications PIs: Corina Sandu, Saied Taheri
Electro-Thermal Modeling of Large-Format Prismatic Cells PI: Charles Monroe
9:35 – 10:00
Restraint System Optimization for Occupants in Tactical Vehicles PI: Jingwen Hu
Energy-Conscious Warm-Up of Li-ion cells from Sub-zero Temperatures PI: Anna Stefanopoulou
May 21 2A: Structures and Materials / Optimization and Reliability Session Leads: Dr. Matt Castanier, Dr. David Lamb
Location: Chesebrough Auditorium
2B: Internal Combustion Engines and Fuels Session Leads: Dr. Pete Schihl, Ms. Sonya Zanardelli
Location: Chrysler Center, Room 133
10:35 Models for Predicting the Structural Dynamics of Hybrid Electric Vehicle Battery Packs Accounting for Cell Properties under SOC and Thermal Variability, PI: Bogdan Epureanu
Jet Fuel Surrogate Development for Diesel Combustion – Which Physical Properties Should Be Emulated by the Surrogate? PI: Angela Violi
11:00 Light Weight Vehicle Structures that Absorb and Direct Destructive Energy Away from the Occupant, PI: Nicholas Vlahopoulos
Reaction Pathway and Elementary Ignition Behavior of Surrogates for JP-8 and Alternative JP-8 Fuels, PI: André Boehman
11:25 Design and Optimization of a Tank Track Pad Meta-Material PI: Georges Fadel
Validation of JP-8 Surrogates in an Optical Engine PI: Marcis Jansons
11:50 Reliable and Conservative Model Validation Approach Given a Lack of Test Data, PI: K. K. Choi
Simplified Combustion Mechanism for Low Cetane Number Diesel Fuels, PI: Naeim Henein
12:15 – 12:40
Advances in Time-Dependent Reliability for Random Vibrations, Fatigue Life and Accelerated Life Testing of Vehicle Systems PI: Zissimos Mourelatos
Bulk Modulus of Compressibility Measurements of Conventional and Alternative Military Fuels PI: André Boehman
TECHNICAL SESSION 1 (8:45am – 10:00am)
21st Annual ARC Program Review – Technical Sessions
TECHNICAL SESSION 2 (10:35am – 12:40pm)
BREAK (10:00am – 10:35am)
Each presenter will have 20mins to speak, followed by a 5min Q&A. ARC projects in their second/third year are required to give a technical talk, unless they are participating in a Case Study.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
TECHNICAL SESSION ABSTRACTS
Technical Session 1A – Vehicle Dynamics & Controls, and Human Centered Modeling
Session Leads: Drs. Paramsothy Jayakumar, Amandeep Singh
1A1: Flexible Multibody Dynamics Approach for Tire Dynamics Simulation
Quad members: Hiroyuki Sugiyama (PI), Hiroki Yamashita, The University of Iowa; Paramsothy Jayakumar, U.S. Army TARDEC; Ryoji Hanada, Yokohama Rubber; SeeChew Soon, Caterpillar Inc.
High-fidelity tire models play an essential role in demonstrating off-road mobility capability in various operational
military scenarios. However, existing high-fidelity finite element tire models are not suited for use in the ground mobility
simulation due to the essential difference in formulations and solution procedures used in multibody dynamics and
nonlinear finite element codes. In this study, the three- dimensional physics-based high-fidelity tire model based on the
flexible multibody dynamics approach is proposed using the absolute nodal coordinate formulation (ANCF). To model
the fiber-reinforced rubber composite that characterizes structural properties of tires, ANCF laminated composite shell
element is developed and utilized in the ANCF tire model. The tire structural properties including the load- deflection
curve, the contact pressure, and the contact patch size are validated against the test data and LS-DYNA FE tire model.
Furthermore, the continuum deformable terrain model is developed using the new ANCF solid element proposed in this
study for ANCF tire-soil interaction simulation.
1A2: A Hybrid Soft Soil Tire Model (HSSTM) for Vehicle Mobility and Performance Analysis in Terramechanics Applications
Quad members: Corina Sandu (PI), Shahyar Taheri (Co-PI), Shahyar Taheri, Virginia Tech; David Gorsich, U.S. Army TARDEC; Brant Ross, MotionPort; Daniel Christ, Michelin Americas Research Company
Accurate and efficient tire models for deformable terrain operations are essential for performing vehicle simulations.
In order to model the dynamic behavior of the tire on soft soil, a lumped mass discretized tire model using Kelvin-Voigt
elements is developed, and optimized computationally. Model parameters are obtained using developed parameterization
procedures. The tests were performed on different terrains (such as sandy loam) and tire forces and moments, soil
sinkage, and tire deformation data were collected for various case studies. Furthermore, simulations at input conditions
similar to the test conditions were performed on a quarter car model, and results used for model validation. The results
have indicated the superiority of this model as compared to other lumped parameter models currently available.
1A3: Restraint System Optimization for Occupants in Tactical Vehicles
Quad members: Jingwen Hu (PI), Jonathan Rupp (Co-PI), Matthew Reed (Co-PI), University of Michigan; Zissimos Mourelatos, Dorin Drignei, Oakland University; Rebekah Gruber, Risa Scherer, U.S. Army TARDEC; Marianne Kump, Brian Hansen, TAKATA
The objective of this study is to optimize the restraint systems for tactical vehicle occupants using an innovative
combination of simulation and physical testing guided by calibration-based optimization. A full vehicle frontal crash test
and 20 sled tests have been conducted to understand vehicle kinematics, and quantify the effects from occupant body size
(5th/50th/95th), military gear (helmet/vest/tactical assault panel), seatbelt type (5point/3point), and advanced seatbelt
features (pretensioner/load limiter) on occupant kinematics and injury risks in frontal crashes. These tests have been used
to validate a set of finite element (FE) models of occupants, body armor, body borne gear, and restraints. A hybrid design-
space exploration optimization method has also been developed to optimize the restraint systems.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
Technical Session 1B – Vehicle Hybridization & Electrification – Energy Storage
Session Leads: Drs. Denise Rizzo, Yi Ding
1B1: Nano-Materials Design for Enhanced Thermal and Mechanical Properties
Quad members: Levi Thompson (PI), Siu on Tung, Ryan Franck, Krista Hawthorne, University of Michigan; Yi Ding, U.S. Army TARDEC; Les Alexander, Navitas
Layered oxides are widely used in lithium ion batteries but their mechanical and thermal properties can lead to safety
and reliability (e.g. cycle life) challenges, in particular for military applications. Stresses induced in oxide particles on
repeated lithium insertion and extraction, for example, can cause mechanical fracture, a suspected contributor to capacity
fade and resistance increases. We hypothesized that the incorporation of pillaring agents between the layers would reduce
the strain caused by lithium insertion and enhance lithium diffusion thereby improving cycle-life, high rate capacities and
resistance to thermal runaway. This presentation will highlight our progress in the preparation of pillared V2O5 and MnO2.
We observed that capacities for the pillared materials were more than 60% higher than those for the unpillared materials
and the capacity retention and rate capabilities were also enhanced confirming that the introduction of pillars can
significantly enhance the capacity, cycle life and thermal stability of layered materials.
1B2: Electro-Thermal Modeling of Large-Format Prismatic Cells
Quad Members: Charles W. Monroe (PI), Jason Siegel, Anna Stefanopoulou, Howie Chu, University of Michigan; Matt Castanier, Yi Ding, U.S. Army TARDEC; Dyche Anderson, Ford Motor Co.; Aaron Knobloch, GE Global Research
The performance and cycle life of a large-format prismatic Li-ion cell may be impeded if it experiences significant
in-plane temperature variation during prolonged operation at high power. For large-format LFP cells, we have produced a
streamlined continuum multiphysics model that illustrates how the material properties of cell constituents and the heat-
transfer characteristics of the battery casing determine the temperature and charge-state distributions within the electrode
materials. The mechanistically-based cell model is sufficiently fast to allow parameter optimization based on thermal
measurements with IR thermometry during pulse charge/discharge experiments. An optimization has been performed to
establish the charge-state and temperature dependences of material properties in relatively young cells. Cells of various
ages are investigated to illustrate how (and which) material parameters vary most significantly with respect to cycling
history.
1B3: Energy-Conscious Warm-Up of Li-ion Cells from Sub-Zero Temperatures
Quad members: Anna Stefanopoulou (PI), Shankar Mohan, Youngki Kim, Jason Siegel, University of Michigan; Yi Ding, U.S. Army TARDEC; Dyche Anderson, Ford Motor Co.
In this talk we formulate and solve the energy-conscious warm-up problem for Li-ion batteries. The most efficient
warm-up is achieved by self-heating, i.e., exploiting the increased internal resistance of Li-ion cells at sub-zero
temperatures to generate the minimum heat for increasing the cell’s temperature until the desired power can be delivered.
The allowable magnitude of currents evolves as the battery warms-up and have to always satisfy the battery
manufacturer’s voltage and current constraints. Our results provide a concrete quantification of the tradeoff between
efficiency and warm-up duration. As every optimal strategy, the most efficient warm-up strategy relies on accurate
knowledge of the battery characteristics which we estimate in real-time by developing a novel estimation technique for
the sub-zero battery overpotentials and the resistive losses.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
Technical Session 2A – Structures and Materials / Optimization and Reliability
Session Co-Chairs: Drs. Matt Castanier, David Lamb
2A1: Models for Predicting the Structural Dynamics of Hybrid Electric Vehicle Battery Packs Accounting for Cell Properties under SOC and Thermal Variability
Quad members: Bogdan I. Epureanu (PI), Jau-Ching Lu, University of Michigan; Matthew P. Castanier, David Lamb, U.S. Army TARDEC; Ramesh Rebba, Thomas Wang, General Motors; Sungkwon Hong, Ford Motor Co.
The structural dynamics of battery packs can change significantly due to small changes in mechanical properties of
the cells (e.g., swelling, elastic modulus). That is because packs are periodic structures composed of nominally identical
cells, which makes the packs sensitive to small variations in cell properties. Cell properties vary frequently due to several
reasons, including changes in SOC and temperature. Hence, fast numerical methods are needed to predict pack vibration
and to design packing solutions to mitigate this sensitivity. Parametric reduced order models (PROMs) are constructed in
this work to capture effects of prestress and cell-to-cell structural variations, packing solutions, and nonlinear material
properties. PROMs are built only once and predict the pack dynamics without additional use of large FE models. PROMs
use inputs from phenomenological models for thermal and Li-ion intercalation swelling. Predictions obtained using
PROMs are validated by comparisons with results from time-expensive FEMs of the same system.
2A2: Light Weight Vehicle Structures that Absorb and Direct Destructive Energy Away from the Occupant
Quad members: Nick Vlahopoulos (PI), Weiran Jiang, University of Michigan; Matt Castanier, Ravi Thyagarajan, U.S. Army TARDEC; Nam Purush, BAE Systems
Pursuing occupant centric vehicle structures that provide safety from explosive threats while at the same time
make the operation of the vehicle comfortable and safe for the soldiers, comprises one of the main thrusts in the Army
S&T activities. In alignment with TARDEC interests a first order assessment method for the response of a multi-layer
panel to impulsive excitation has been developed. This research intends to provide a capability for rapidly assessing the
effectiveness of a large number of alternative materials and multi-layer configurations. The direction of the research in
employing the new simulation capability which is based on the reverberation matrix method for improving occupant
survivability will be discussed.
2A3: Design and Optimization of a Tank Track Pad Meta-Material
Quad members: Georges M. Fadel (PI), Zachary T. Satterfield, Neehar Kulkarni, Gang Li, Nicole Coutris, Clemson University; Matthew Castanier, David Ostberg, U.S. Army TARDEC; Christopher V. Cardine, General Dynamics
A meta-material with low hysteresis loss and a compliance comparable to a tank track pad elastomer is currently
being designed. Previous work extracted the nonlinear strain response under uniaxial compression which is the main
deformation mode the current elastomer experiences during each loading cycle. This nonlinear curve serves as the target
for the design of the meta-material being pursued. The unit cell of an elastic meta-material is designed by combining
structural components with different geometric nonlinearities. A parametric optimization process is then carried out on an
initial geometry to converge to the target material response. The optimized geometry closely meeting the requirement is
presented and compared to the original track pad under both uniform compression and wheel loading conditions.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
2A4: Reliable and Conservative Model Validation Approach Given a Lack of Test Data
Quad members: K. K. Choi (PI), Min-yeong Moon, Hyunkyoo Cho, Nicholas Gaul, University of Iowa; David Lamb, David Gorsich, U.S. Army TARDEC
A simulation model cannot exactly represent the real physical system due to simplifications and idealizations. A new
model validation approach is proposed to provide reliable simulation-based design using a conservative estimation of
probability of failure given limited test data. With the uncertainty due to limited test data, estimated probability density
function (PDF) and probability failure are uncertain as well. In this method, at a user-specified conservativeness level, a
target output PDF and a conservative probability of failure are determined. Then a set of calibration parameters and model
bias are optimized to obtain a simulation model fit the target output PDF. A simply supported beam is used to
demonstrate that the proposed method provides a validated simulation model that yields reliability.
2A5: Advances in Time-Dependent Reliability for Random Vibrations, Fatigue Life and Accelerated Life Testing of Vehicle Systems
Quad members: Zissimos P. Mourelatos (PI), Monica Majcher, Igor Baseski, Oakland University; Amandeep Singh, Igor Baseski, U.S. Army TARDEC
Reliability usually degrades with time, increasing the product lifecycle cost. It is desirable to use accelerated testing
to predict vehicle reliability under dynamic loads using a few tests of short duration and available large-scale simulation
models. We utilize available tests to calibrate a simulation model which is then used to calculate the time-dependent
reliability of a vehicle fleet. In this talk, we will present recent advances in time-dependent reliability of linear vibratory
systems with random parameters excited by non-stationary random loads. Our approach combines principles of random
vibrations and time-dependent reliability using an integral equation involving up-crossing and joint up-crossing rates. The
proposed method has immediate applications in fatigue life prediction and accelerated life testing.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
Technical Session 2B – Internal Combustion Engines and Fuels
Session Leads: Dr. Pete Schihl, Ms. Sonya Zanardelli
2B1: Jet Fuel Surrogate Development for Diesel Combustion – Which Physical Properties Should be Emulated by the Surrogate?
Quad members: Angela Violi (PI), Jason Martz, Doohyun Kim, University of Michigan; Peter Schihl, Eric Sattler, U.S. Army TARDEC; Peter Attema, Detroit Diesel/Daimler
Fuel surrogate able to reproduce chemical and physical properties of real fuel is needed to achieve accurate CFD
simulations of internal combustion engines. In this work, we present our latest advancement in terms of surrogate
formulation that is able to emulate physical and chemical properties of conventional and alternative jet fuels. The
optimizer developed to produce fuel formulations has been improved to include a regression equation to predict the
Derived cetane Number of surrogate component mixtures.
In parallel, we have conducted reactive spray simulations, using a validated CFD code to determine the parametric
effects of liquid physical properties on the spray characteristics and ignition delay period of diesel combustion. This study
provides insights on the physical properties that should be emulated by the surrogates for diesel combustion.
2B2: Reaction Pathway and Elementary Ignition Behavior of Surrogates for JP-8 and Alternative JP-8 Fuels
Quad members: Andre Boehman (PI), Angela Violi, Jason Martz, Dongil Kang, University of Michigan; Eric Sattler, U.S Army Tardec; Peter Attema, Detroit Diesel/Daimler
A modified CFR motored engine and an optically accessible spray constant volume combustion chamber are
employed to investigate how the chemical and physical properties of JP-8 surrogates affect the fundamental ignition
behavior as compared to a real JP-8 fuel. An observation of ignition behavior including critical compression ratio and
equivalence ratio, and % low temperature heat release are assessed using a motored engine, while physical and chemical
ignition delays are measured using a modified CID unit under a wide range of ambient air temperatures and oxygen
dilutions. In addition, global ignition behavior of alternative JP-8 fuels (ATJ, Camelina, Farnesane and S8) is investigated
and their binary mixtures are also developed to mimic combustion characteristics of practical JP-8 and diesel used in a
compressed ignition engine.
2B3: Validation of JP-8 Surrogates in an Optical Engine
Quad members: Marcis Jansons (PI), Xin Yu, Xi Luo, Andrew Abdul-Nour, Wayne State University; Peter Schihl, U.S. Army TARDEC; Taylor Hansen, Controlled Power Technologies, Inc.
An experimental fuel surrogate validation approach is developed for a compression ignition application. The
agreement of both physical and chemical properties of surrogate and target jet fuels is examined in an optical engine
under temperature and pressure histories approaching those found in military engines. In-cylinder Mie scattering
measurements are applied to compare the liquid penetration lengths, early mixture formation and low temperature
reactivity are investigated using 2-D broadband chemiluminescence imaging, while high temperature ignition is examined
with OH chemiluminescence measurements. The optical diagnostics are combined with cylinder pressure-based
combustion analysis, including ignition delay and burn duration. Engine-out UHC, NO and soot emissions are also
compared at different intake conditions, injection pressures and injection strategies. The approach provides validation
data for the use of the surrogates in numerical combustion models.

21ST
ANNUAL AUTOMOTIVE RESEARCH CENTER PROGRAM REVIEW
2B4: Simplified Combustion Mechanism for Low Cetane Number Diesel Fuels
Quad members: Naeim A. Henein (PI), K. Udayachal, M.Trivedi, S. Bodele, Wayne State University; Peter Schihl, Laura Decker, U.S. Army TARDEC; Inderpal Singh, Detroit Diesel Co.
The goal of this project is to develop a simplified combustion mechanism for CFD simulation codes used in design,
operation and control of military engines using low cetane number (CN) fuels, such as Sasol. The mechanism is based on
a surrogate of three single-component fuels of known combustion mechanisms. The matching of the surrogate and the
basic fuel is for properties stated in the order of their importance: CN, volatility, density, heating value, H/C and
Threshold shooting index (TSI). The validation of CN is in the Ignition Quality Tester (IQT). This is followed by
matching the autoignition and combustion characteristics in the single Cylinder PNGV research engine. Finally, a
comparison will be made between simulated and engine experimental results.
2B5: Bulk Modulus of Compressibility Measurements of Conventional and Alternative Military Fuels
Quad members: André Boehman (PI), Taemin Kim, University of Michigan; Eric Sattler, U.S. Army TARDEC; Peter Attema, Daimler Trucks North America
The atmospheric density and isothermal bulk modulus of three conventional jet fuels (POSF 4658, POSF 6169,
POSF 10325), three alternative jet fuels (GEVO Alcohol to jet (ATJ), Hydroprocessed esters and fatty acids-
Camelina(HEFA-Camelina), Amyris Farnesane), two UM jet fuel surrogates (UM1, UM2) and the ingredient components
of the UM surrogates (n-dodecane, iso-cetane, decalin, toluene, methylcyclohexane (MCH)) are measured at 313.15K
(40°C) with varying pressures up to 27.68MPa (4000psig). The density of UM2 matches that of the target fuel (POSF
4658) over the whole range of pressure of interest (0-4000psig). Measurement results of the ingredient compounds imply
that high density and bulk modulus of decalin compared to methyl cyclohexane (MCH) enabled UM2 to accurately
emulate the compressed liquid density of the target fuel.

Poster Session: Projects and Layout Chrysler Center Gallery Note: Posters with the “.A#" designation are works of Add-on projects, which are on targeted or non-core funding.
Automotive Research Center 21st Annual Program Review

Key
For your internet needs on campus: •Connect to MGuest WiFi network •Open your web browser; the MGuest login page will appear •Enter your e-mail address and agree to the terms to gain access North Campus Map
21st Annual ARC Program Review – Internet Access & North Campus Map
Lurie Engineering
Center
21st Annual ARC Program Review Venue: Chrysler Center – Chesebrough Auditorium
Sign-in Desk

Access Room 133 for Sessions 1B & 2B via: - from the lower auditorium doors - stairs/elevator from lobby
Outdoor Lunch Venue Set-up
Lobby
Room 133
(lower level)
Chesebrough Auditorium (Room 220)
Gallery: Poster Session & Reception
21st Annual ARC Program Review - Chrysler Center Layout