2010:020 MASTER'S THESIS - diva-portal.org1018226/FULLTEXT01.p… · Computer Aided Design...
106
2010:020 MASTER'S THESIS Evaluation of 3D Rotordynamics Capabilities within NX Nastran Florian Thiery Luleå University of Technology Master Thesis, Continuation Courses Engineering mechanics Department of Applied Physics and Mechanical Engineering Division of Solid Mechanics 2010:020 - ISSN: 1653-0187 - ISRN: LTU-PB-EX--10/020--SE
Transcript of 2010:020 MASTER'S THESIS - diva-portal.org1018226/FULLTEXT01.p… · Computer Aided Design...

2010:020
M A S T E R ' S T H E S I S
Evaluation of 3D Rotordynamics Capabilitieswithin NX Nastran
Florian Thiery
Luleå University of Technology
Master Thesis, Continuation Courses Engineering mechanics
Department of Applied Physics and Mechanical EngineeringDivision of Solid Mechanics
2010:020 - ISSN: 1653-0187 - ISRN: LTU-PB-EX--10/020--SE

Acknowledgements
First of all, I would like to thank my supervisor Jan-Olov Aidanpää as wellas my co-supervisor Marcus Sandberg for giving me the opportunity to carryout my Master’s thesis at the Solid Mechanics Department and Division ofFunctional Product Development in Luleå University of Technology. Theyhave always been very kind and friendly when answering questions or havingnew ideas to carry through this project.
Then I would like to thank Christina Hamsch, from the International of-fice, for allowing me to stay one more semester to complete the Master’s de-gree. On the other side I would also like to thank the "Scolarité Office" fromENSEM (engineering school) who allowed students like me to stay longer inLTU to finish their Master’s thesis.
I would also like to express my sincere gratitude to my family, parents andgrand-parents from France, who always supported me with my studies andagreed with the way I decided to pursue my education whatever the choicesI made in the last 5 years.
Finally, I am very grateful to Amir Jourak, who helped me giving litera-ture and always shared happiness during coffee breaks; Matthias Wissemberg,friend of mine who made a lot to obtain the authorization to stay in Sweden;I also send a warmly appreciation to Luisa Sa Vitorino, Martin Johanssonwithout forgetting all the other students (exchange or Swedish) for their loveand support during my whole studies.
Luleå, April 2010
Florian Thiery
1

Abstract
In today’s industry, companies within the jet engine industry are trying tomake their product development more effective. One way is to use productmodels to enable upfront evaluation through simulation.
To model the dynamic behaviour of rotors, mainly beam and shell ele-ments are used in the common rotor-dynamics software. As the geometrybecomes more complex, 3D rotor-dynamics can be used to solve vibrationproblems as well as the interactions with bearings and the non-rotating struc-ture. This 3D-modelling could also give a more realistic post-processing thanthe current software in the market and the dynamics of the whole engine couldbe assessed.
To try to solve these rotor-dynamics problems, NX7 was used, a commer-cial CAD/CAM/CAE software developed by Siemens PLM software. Thesolver used is NX Nastran Rotor-Dynamics. The main interest in this choice(with the 3D capabilities) is that both the CAD and CAE will be performedon the same platform and adjustments can be done faster if some problemsin meshing or modelling occur.
The aim of this Master’s thesis is thus to develop a whole engine with theComputer Aided Design capabilities of NX7 and investigate the possibilitiesof doing rotor-dynamics analyses with NX Nastran Rotor Dynamics. Firstof all, simpler models were studied to validate the analyses and more com-plicated elements were added piece by piece until all the problems are solvedto build the whole engine and analyse it.
The results presented in this Master’s thesis reveal several aspects ofrotordynamics analysis. First of all, a section is dedicated to the mode shapesof the rotor for several common models. Then plots of Campbell diagramare shown and compared with theoretical results. Finally, a mass unbalanceanalysis is performed for all types of rotor and the displacement and rotationresponse are plotted for some particular nodes. These displacement curves
2

are also compared with the Campbell diagrams to check if the simulation arerun properly.
The main problem in this Master’s thesis is that the program is today tooundeveloped for efficient 3D modelling of rotors. Indeed, it was found thatrotating and stationary parts could not be coupled in the Campbell diagram.Also a lot of commands and execution needs to be done manually and thepossibilities of post-processing have to be developed to facilitate an effectiveevaluation of the results.
The future of this project will be to try to integrate optimization tools tothese analyses, in order to have a better design and better dynamics results.That is why the 3D rotordynamics simulation within NX are important: itcould enable to design a whole engine, study the dynamics of it and optimizethe whole system to come to a more efficient engine, all of this by using thesame software. This could result in time-savings and more efficient design ofengines in years to come.
3

Table of symbols
Symbol Description Unit
m Mass kgd,C Viscous damping kg/sK Stiffness N/m (kg/s2)Ω Rotational speed rad/sF Force Newton (kg.m/s)E Young’s modulus GPaρ Density kg/m3
ν Poisson’s ratio no unitI Second moment of area m4
α Flexibility coefficient m/NH Moment of Momentum N.s/mM Moment N/mJp Polar moment of inertia kg.m2
Jd Diametric moment of inertia kg.m2
ξ Damping ratio no unitx,y Position mx,y Velocity m/sx,y Acceleration m/s2
e Eccentricity mθ,ϕ Angle rad
θ,ϕ Angular velocity rad/s
θ,ϕ Angular acceleration rad/s2
Nota Bene: The notation used here are general. They can be com-pleted with a subscript, which could mean "rotation", "translation", "x-direction",...
4

Contents
1 Introduction 10
2 Generalities 13
2.1 Rotor dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Linear Jeffcott rotor . . . . . . . . . . . . . . . . . . . 13
2.1.2 The gyroscopic effect . . . . . . . . . . . . . . . . . . . 15
2.1.3 Critical speeds and Campbell diagram . . . . . . . . . 21
2.1.4 Response to unbalance . . . . . . . . . . . . . . . . . . 22
2.2 Finite element method . . . . . . . . . . . . . . . . . . . . . . 23
3 The NX Nastran analysis 27
3.1 Theoretical foundation of rotor dynamics within Nastran . . . 27
3.1.1 Additional terms in the equations of motion . . . . . . 27
3.1.2 Equation of motion for the fixed reference system . . . 28
3.1.3 The Steiner’s inertia terms in the analysis . . . . . . . 30
3.1.4 Real eigenvalue analysis . . . . . . . . . . . . . . . . . 31
3.1.5 The fixed system eigenvalue problem . . . . . . . . . . 31
3.1.6 Solution interpretation . . . . . . . . . . . . . . . . . . 32
3.2 Equation of motion for modal frequency response . . . . . . . 32
4 Modelling of the 2D-3D rotor in NX7 34
4.1 The middle span rotor (Jeffcott rotor) . . . . . . . . . . . . . 34
4.1.1 The geometric modelling of the rotor . . . . . . . . . . 34
4.1.2 Meshing . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5

4.1.3 The boundary conditions . . . . . . . . . . . . . . . . . 42
4.2 The Overhung Rotor . . . . . . . . . . . . . . . . . . . . . . . 42
4.2.1 The geometric modelling of the rotor . . . . . . . . . . 42
4.2.2 1D-Meshing . . . . . . . . . . . . . . . . . . . . . . . . 43
5 Defining NX Nastran input for rotor dynamics 45
5.1 Modifications of the .dat file . . . . . . . . . . . . . . . . . . . 45
5.1.1 The file management section . . . . . . . . . . . . . . . 45
5.1.2 The executive control section . . . . . . . . . . . . . . 46
5.1.3 The case control section . . . . . . . . . . . . . . . . . 46
5.1.4 The bulk data section . . . . . . . . . . . . . . . . . . 47
5.2 Interpretation of rotor dynamics output . . . . . . . . . . . . . 48
5.2.1 The .f06 file . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2.2 The .op2 file . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2.3 The .csv file . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3 Procedure to perform an entire rotor dynamics simulation . . 51
6 Analysis of the results 53
6.1 The middle span rotor . . . . . . . . . . . . . . . . . . . . . . 53
6.1.1 Quality of mesh and accuracy . . . . . . . . . . . . . . 53
6.1.2 Campbell diagram . . . . . . . . . . . . . . . . . . . . 54
6.1.3 Parameters influencing the results . . . . . . . . . . . . 59
6.2 The Overhung rotor . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2.1 Mode shapes and Campbell diagram . . . . . . . . . . 60
7 Solving the mass unbalance problem 63
7.1 Mass unbalance cards and modal frequency analysis . . . . . . 63
7.1.1 Additional cards in the bulk data section . . . . . . . . 63
7.1.2 Dynamic load . . . . . . . . . . . . . . . . . . . . . . . 64
7.2 Mass unbalance response of the Jeffcott rotor . . . . . . . . . 66
7.2.1 Synchronous analysis with internal damping . . . . . . 66
7.2.2 Synchronous analysis with external damping . . . . . . 70
6

7.2.3 Asynchronous analysis . . . . . . . . . . . . . . . . . . 72
7.3 Mass unbalance response of the overhung rotor . . . . . . . . . 74
8 Modelling and analyses of a more realistic rotor 77
8.1 Modelling of the rotating part . . . . . . . . . . . . . . . . . . 77
8.1.1 Meshing . . . . . . . . . . . . . . . . . . . . . . . . . . 78
8.1.2 Boundary conditions . . . . . . . . . . . . . . . . . . . 81
8.2 Analysis of the modal complex eigenvalue solution . . . . . . . 82
8.2.1 Shaft without blades and no non-rotating structure . . 82
8.2.2 Shaft without blades and with the non-rotating structure 84
8.2.3 Shaft with blades and no non-rotating structure . . . . 85
8.3 Frequency response analysis of the rotor alone . . . . . . . . . 87
9 Conclusion and discussion 90
7

List of Figures
2.1 The mid-span rotor . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 The unbalance disc on a shaft . . . . . . . . . . . . . . . . . . 14
2.3 Simple view of the overhung rotor . . . . . . . . . . . . . . . . 15
2.4 Forces and moments acting on the system in 3D . . . . . . . . 16
2.5 Forces and moments acting on the system in 2D . . . . . . . . 17
2.6 Geometric representation of z’ . . . . . . . . . . . . . . . . . . 18
2.7 Example of Campbell diagram . . . . . . . . . . . . . . . . . . 21
2.8 Response of an unbalance rotor as a function of the frequency 23
4.1 Revolution of the sketch of the rotor . . . . . . . . . . . . . . 35
4.2 Type of solid elements . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Properties of the shell elements . . . . . . . . . . . . . . . . . 38
4.4 Connections of 1D elements at the end of the shaft (ref [2]) . 40
4.5 The "spider" rigid connection (in blue) . . . . . . . . . . . . . 41
4.6 The overhung rotor model . . . . . . . . . . . . . . . . . . . . 43
4.7 General View of the 3D-rotor . . . . . . . . . . . . . . . . . . 43
4.8 Cage surrounding the shaft with bearings . . . . . . . . . . . . 44
5.1 Data entries of the rotor dynamic analysis . . . . . . . . . . . 49
5.2 Diagram of the entire rotor-dynamics procedure . . . . . . . . 50
6.1 Translation and tilting mode of the mid-span rotor . . . . . . 54
6.2 Example of a CHEXA(20) mesh and the eigenfrequencies . . . 55
6.3 Campbell diagram for the midspan rotor . . . . . . . . . . . . 57
6.4 Damping values as function of the speed . . . . . . . . . . . . 58
6.5 1st and 2nd modes shapes of the overhung rotor . . . . . . . . 60
6.6 Campbell diagram for the overhung rotor . . . . . . . . . . . . 61
8

7.1 Bulk data entries for the dynamic load . . . . . . . . . . . . . 65
7.2 Visualization of the dynamic load . . . . . . . . . . . . . . . . 65
7.3 Displacement for the backward whirl . . . . . . . . . . . . . . 67
7.4 Rotation for the backward whirl . . . . . . . . . . . . . . . . . 68
7.5 Theoretical displacement calculated with Matlab for the back-
ward whirl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.6 One and a half degree of freedom system . . . . . . . . . . . . 70
7.7 Displacement response for several damping ratios . . . . . . . 71
7.8 Displacement for the backward whirl of the asynchronous anal-
ysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
7.9 Rotation for the backward whirl of the asynchronous analysis . 73
7.10 Displacement of node 909 for the backward simulation . . . . 75
7.11 Displacement of node 909 for the forward simulation . . . . . 76
8.1 Rotor modelling with blades . . . . . . . . . . . . . . . . . . . 78
8.2 Real rotor to be modelled . . . . . . . . . . . . . . . . . . . . 79
8.3 Meshing of the blades . . . . . . . . . . . . . . . . . . . . . . . 80
8.4 Connection of the bearings to the non-rotating structure . . . 81
8.5 Mode shapes of the rotor . . . . . . . . . . . . . . . . . . . . . 83
8.6 Unrealistic modes of the rotor . . . . . . . . . . . . . . . . . . 84
8.7 First two modes of the rotor with the structure . . . . . . . . 85
8.8 Mode shape of the blades . . . . . . . . . . . . . . . . . . . . . 86
8.9 Campbell diagram of the realistic rotor . . . . . . . . . . . . . 87
8.10 Backward and forward displacement of the realistic rotor . . . 88
9

Chapter 1
Introduction
The engineering design challenge presented by aerodynamic and hydrody-
namic flows, design of blading, can sometimes cause the rotordynamics re-
quirements of turbo-machinery (e.g. jet engines, gas turbines, compressors)
design to be overlooked. It has happened that expensive turbomachines have
been built and found to be incapable of producing their rated performance
due to assumptions in the model.
Thus in designing, operating and troubleshooting turbo-machinery, rotor
dynamics analysis can help accomplish the following objectives [3] :
1. Predict critical speeds (speeds at which vibration due to rotor imbal-
ance is a maximum)
2. Determine design modification to change critical speeds
3. Predict amplitudes of synchronous vibration caused by rotor imbalance
4. Predict threshold speeds and vibration frequencies for dynamic insta-
bilities
5. Determine design modification to suppress dynamic instabilities
So basically, this project is considering three parts: designing, performing
rotor-dynamic analysis, upgrading the engine (optimizing), but in reality
10

more complex aspects to model have to be taken in account. The following
diagram shows how they are related.
The part which will be developed in this project is the rotor dynamics
analysis in 3D. Normally, these studies are done by using beam elements in
the common rotor dynamics software (see Appendix A). Currently, only a few
software are able to perform 3D rotor dynamics analyses. They usually are
non-specific codes for rotor dynamics (i.e. they were not created to perform
only rotordynamics analyses). These are:
• Ansys, the version 11 workbench and classic is capable of solving the
rotordynamic equations (3-D/2-D and beam element)
• SAMCEF, a finite element based code (3-D/2-D and beam element)
11

• Nastran
Even if these software are not made to study the rotor-dynamics as a
priority, the most interesting part is that compared with the 1D beam element
solvers, all types of element can be used (beam, shell, solid elements) and
connected all together with springs and dampers to a big structure when the
whole designed model is very complicated. But still investigation on these
elements has to be done to be sure that the 3D rotordynamics analyses are
done properly with simple structures. Once this is secured, the 3D meshing
could be develop in a good way to build more accurate models.
12

Chapter 2
Generalities
2.1 Rotor dynamics
The aim of this chapter is to introduce the general concept of rotordynamics
analyses. This is done by deriving the equations from a well-known model
called the Jeffcott Rotor [4], also called the "De Laval rotor" in Europe.
2.1.1 Linear Jeffcott rotor
Figure 2.1: The mid-span rotor
13

The figure 2.1 shows a view of the general Jeffcott rotor. This model
includes unbalance, viscous damping and whirl-instability (see section 2.3).
To understand the behaviour of the Jeffcott rotor, figure 2.2 shows the
view of the disc with a mass unbalance. The disc is mounted on a shaft and
is unbalanced, i.e. differs by the distance e from the geometric center (GC).
Figure 2.2: The unbalance disc on a shaft
The equations of motion can be derived from the previous figures. A
position vector ~r is used from the origin O till the center of gravity of the
disc. Thus:
~r = (x + e cos(Ωt))~i + (y + e sin(Ωt))~j (2.1)
~r = (x − eΩ2 cos(Ωt))~i + (y − eΩ2 sin(Ωt))~j (2.2)
The stiffness and damping of the shaft are called k and c respectively,
and also m the mass of the disc. The Newton’s second law applied to the
system gives:
m~r = −(kx + cx)~i − (ky + cy)~j (2.3)
14

Equation 2.2 into equation 2.3 gives the equations of motion:
mx + cx + kx = meΩ2 cos(Ωt) (2.4)
my + cy + ky = meΩ2 sin(Ωt) (2.5)
When Φ = Ω, this gives the phenomena of synchronous whirl. This occurs
when the angular velocity of the bended shape is equal to the angular velocity
of the rotating speed. The whirl is a two dimensional orbit motion made by
the geometric center. The orbit can have the same or the opposite direction
as the spin direction of the rotor (respectively called forward whirl and
backward whirl).
2.1.2 The gyroscopic effect
The gyroscopic effect happens when a spinning object is subjected to a
rotational perturbation when a restoring moment appears. At high spin
speeds or high moments of inertia, this phenomena becomes much significant.
This is analysed by determining the equations of motion of an overhung rotor.
Figure 2.3: Simple view of the overhung rotor
The stiffness of the beam can be obtained with the beam theory. The
following expressions can be found in an elementary case (cantilever beam
submitted to an end force and end moment).
15

For a beam submitted to a end force F, both displacement and phase are
given by:
δ =FL3
3EI= α1F (2.6)
φ =FL2
2EI= α2F (2.7)
For a beam submitted to a end moment M, both displacement and phase
are given by:
δ =ML2
2EI= α2M (2.8)
φ =ML
EI= α3F (2.9)
The associated moments and forced can be derived from a free body
diagram. A free body diagram is a pictorial representation of the forces
acting on a free body, showing both contact and non-contact forces acting
on this body (see figure 2.4).
Figure 2.4: Forces and moments acting on the system in 3D
16

If the deformations of the beam are studied in 2D with the equations
(2.6)-(2.9), the flexibility matrix for the beam can be derived with the help
of figure 2.5
Figure 2.5: Forces and moments acting on the system in 2D
Thus the following equations are obtained:
x = α1Fx + α2My (2.10)
y = α1Fy + α2(−Mx) (2.11)
−ϕ = α2Fy + α3(−Mx) (2.12)
θ = α2Fx + α3My (2.13)
In a generalized form, this gives:
q = [α]F =⇒ F = [α]−1q = [K]q (2.14)
The α matrix contains the flexibility coefficients like this:
[α] =
α1 0 0 α2
0 α1 −α2 0
0 −α2 α3 0
α2 0 0 α3
(2.15)
17

Thus the stiffness matrix ([K] = [α]−1 in equation 2.14) is given by:
[K] =
K1 0 0 K2
0 K1 −K2 0
0 −K2 K3 0
K2 0 0 K3
(2.16)
In this way the forces on the beam can be solved. The forces on the disc
are the same but with opposite signs.
The gyroscopic effect appears when the beam bends. Indeed, the disc will
rotate in a new direction Z’ which deviates from Z. The change in rotational
direction results in a gyroscopic restoring moment of the disc. To describe and
derive these moments, the moment of momentum H has to be determined.
The moment is equal to the time derivative of the momentum, i.e. H = M .
Thus it follows that:
Hz′ = ΩJp (2.17)
Figure 2.6: Geometric representation of z’
From the geometry of figure 2.6, it follows that:
H2
zz′ + H2
xz′ + H2
yz′ = H2
z′ (2.18)
18

H2
xz′ = H2
zz′ tan θ (2.19)
H2
yz′ = H2
zz′ tan(−ϕ) (2.20)
As the angles are assumed to be small, the equations 2.17, 2.19 and 2.20
into equation 2.18 give:
H2
zz′(1 + θ2 + ϕ2) ≃ H2
z′ (2.21)
H2
zz′ ≃ ΩJp (2.22)
The equation 2.22 into equation 2.17 and 2.18 gives the components in x
and y. According to figure 2.5, the moment of momentum from the rotations
around ϕ and θ should be added. Thus one get:
Hx = Jdϕ + ΩJpθ (2.23)
Hy = Jdθ − ΩJpϕ (2.24)
Hz = ΩJp (2.25)
The time derivative of the functions gives the moments caused by the
gyroscopic effect:
MHx = Jdϕ + ΩJpθ (2.26)
MHy = Jdθ − ΩJpϕ (2.27)
MHz = 0 (2.28)
The equations 2.15, 2.26 and 2.27 give together with the result of rotating
unbalance the following equations of motion:
19

mx = −K1x − K2θ + meΩ2 cos(Ωt) (2.29)
my = −K1y + K2ϕ + meΩ2 sin(Ωt) (2.30)
Jdϕ + ΩJpθ = K2y − K3ϕ (2.31)
Jdθ − ΩJpϕ = −K2x − K3θ (2.32)
Equations 2.29 to 2.32 can be written into a matrix form:
m 0 0 0
0 m 0 0
0 0 Jd 0
0 0 0 Jd
x
y
ϕ
θ
+ Ω
0 0 0 0
0 0 0 0
0 0 0 Jp
0 0 −Jp 0
x
y
ϕ
θ
+
K1 0 0 K2
0 K1 −K2 0
0 −K2 K3 0
K2 0 0 K3
x
y
ϕ
θ
= meΩ2
cos(Ωt)
sin(Ωt)
0
0
(2.33)
In a shorter way, it can also be written:
[M ]r + Ω[G]r + [K]r = [F ] (2.34)
The equation can be used to simulate the dynamics of the system, for ex-
ample by using Matlab. The property of the gyroscopic matrix is dependent
of Ω, that means the eigen-frequencies will depend on the rotating speed of
the rotor. This is a specific result of the rotating systems.
20

2.1.3 Critical speeds and Campbell diagram
Every rotor-bearing system has a number of discrete natural frequencies of
lateral vibration. When one of the natural frequencies is excited by rotor im-
balance rotating at shaft speed, the shaft speed which coincides with natural
frequency is called a critical speed.
In mathematical terms, the natural frequencies are called eigenvalues
and the mode shapes eigenvectors. The mode shape describes the expected
curvature (or displacement) of the rotor at a particular mode. Theoretically,
a distributed mass-elastic system has an infinite number of eigenvalues and
associated eigenvectors. But in practice, only the lowest critical speeds and
associated whirl modes are excited in the speed range of a typical turbo-
machine.
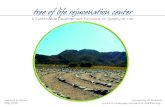
Figure 2.7: Example of Campbell diagram
21

As the natural frequencies vary with the spin speed (equation 2.34), the
best way to find these critical speeds is to plot the Campbell diagram [5].
It consists of plotting the natural frequencies as a function of the rotational
speed. Theoretically, these damped natural frequencies are the imaginary
part of the eigenvalues. The critical speeds are found where the natural
frequencies coincide with the speed spin (ω = Ω). In figure 2.7, frequencies
that increase (blue line) is called forward whirl whereas the one that decrease
(red line) is named backward whirl. The straight red line shows a linear whirl,
which means that the eigen-frequency is not depending on the rotational
speed. The critical speeds can be observed when the black line (called 1P
line) crosses the other curves (red or blue).
2.1.4 Response to unbalance
As shown in equation 2.33, a sinusoidal force is applied on the system. This
is due to the unbalanced mass, which is one of the main problems in rotor-
dynamic systems. For a 1-dimensional system, the equation to solve is:
mx + cx + kx = mueΩ2 sin(Ωt) (2.35)
The excitation is due to an applied force F0 sin(Ωt) where F0 = mueΩ2.
This is the centripetal force of the mass mu towards the center of rotation.
If the rotor is balanced, no force exists, but this is very seldom the case. The
amplitude of the excitation depends on both the out-of-balance mass, and
its effective distance from the axis of rotation, as well as on the rotational
speed.
The response will be given by x = X0 sin(Ωt − φ) where:
X0 =mueΩ
2/k√
(1 − r2)2 + (2ξr2)(2.36)
tan φ =2ξr
1 − r(2.37)
Here ω is the natural frequency ω =
√
k
m, ξ =
c
2√
kmand r =
Ω
ω.
22

In a non-dimensional form, it is easier to see how in general the response
depends on the frequency ration r and on the damping ratio ξ. Therefore:
X0
e
m
mu
=r2
√
(1 − r2)2 + (2ξr2)(2.38)
Then the figure 2.8 is obtained by plottingX0
e
m
mu
against r for several
damping ratios.
Figure 2.8: Response of an unbalance rotor as a function of the frequency
2.2 Finite element method
The finite element method is a very general method to handle difficult prob-
lems that cannot be solved analytically. This method is widely used in many
23

fields (thermodynamics, electrical engineering, ...) and one that is very suit-
able for is in structural mechanics. FEM is based on the subdivision of the
structure into finite elements.
Element formulation
Many different element formulations have been developed depending on their
shape and characteristics: beam elements, shell elements, plate elements,
solid elements and many others. Each element is the model of a small de-
formable solid. Inside each element the displacement u(x, y, z) of the point
with the coordinates x,y,z is approximated by combination of the shape func-
tions N . FEM is usually developed using matrix notation to obtain formulas
that can easily be transferred into computer code. The displacements are
usually written in three dimensions:
u(x, y, z, t) = N(x, y, z)q(t) (2.39)
The displacements can contain more dimensions if rotations of the el-
ements are considered. In this case, q is a vector with the n generalized
coordinates, and N the matrix containing the shape functions. There are as
many rows in N as in u and as many columns as the number n of degrees of
freedom. For a two dimensional element, the equations can be written:
(
ux(x, y, t)
uy(x, y, t)
)
=
(
N(x, y) 0
0 N(x, y)
)(
qx(t)
qy(t)
)
(2.40)
The shape functions can be chosen arbitrarily, but they have to satisfy
several conditions such as:
• be continuous and derivable up to the required order, which depends
on the element type
• be able to describe rigid body of the element leading to vanishing elastic
potential energy
24

• lead to constant strain field when the overall deformation of the element
dictates so
• lead to deflected shape of each element that matches the shape of the
surrounding elements
The strains in each element can be expressed as functions of the deriva-
tives of the displacements with respect to space coordinates; this makes pos-
sible to write the strains as:
ε(x, y, t) = B(x, y)q(t) (2.41)
B is a matrix containing the derivatives of the shape functions. The stress
can be expressed as:
σ(x, y, t) = Eε = E(x, y)B(x, y)q(t) (2.42)
E is the stiffness matrix of the material. Since only isotropic material is
used, E is a scalar. The potential energy can then be expressed as:
U =1
2
∫
V
εTσdV =1
2qT (
∫
V
BT EBdV )q (2.43)
The integral in equation 2.43 is the stiffness matrix of the element:
K =
∫
V
BT EBdV (2.44)
The mass matrix is derived from the expression of kinetic energy of the
element and the shape functions:
T =1
2qT (
∫
V
ρNT NdV )q (2.45)
M =
∫
V
ρNT NdV (2.46)
The form of the matrix B is dependent of the shape functions N and
can hence be in different dimensions and considered in different degrees of
25

freedom. This gives different dimensions of the stiffness matrix depending of
the assumed shape functions. Then these two matrices are introduced into
Newton’s second law:
Mq + Kq = F (t) (2.47)
The Fung and Tong book [6] can be investigated to have more details
about the finite element method (shape functions for solid elements, assembly
process, ...).
26

Chapter 3
The NX Nastran analysis
This chapter has similarities with Chapter 2 as it presents theoretical foun-
dation of rotor-dynamics.
3.1 Theoretical foundation of rotor dynamics
within Nastran
A said in Chapter 1, for a rotating structure, additional terms occur in the
equations of motion depending on the chosen analysis system. The fixed
system will mainly be used, and the rotor is rotating about the z-axis (default
axis). The equations of motion are described in this system. One has to set
"GRID" points that belongs to the rotor to distinguish between the rotating
and fixed parts of the structure.
3.1.1 Additional terms in the equations of motion
• Coriolis forces and gyroscopic moments
Rotor dynamics analyses in NX Nastran include both Coriolis forces
and gyroscopic effects. In the rotating analysis system, the Coriolis
forces of the mass points are included. In the fixed analysis system,
the gyroscopic moments due to nodal rotations are included.
27

• Damping
The damping in a rotor system is divided into two parts: the internal
damping acting on the rotating part of the structure, and the external
damping acting on the fixed part of the structure and in the bearings.
The rotor can become unstable at speeds above the critical speed as the
internal damping has a destabilizing effect. On the contrary, the exter-
nal damping has a stabilizing effect (more information about damping
is given in Appendix C).
3.1.2 Equation of motion for the fixed reference system
The generalized equation of motion is as follows:
[M ]q + (Ω[C ] + [DI + DA])q + ([K] + Ω[DB])q = 0 (3.1)
The generalized matrices are given by:
• [M ] = [Φ]T [M ][Φ] = [I] the generalized mass matrix
• [C] = [Φ]T [C][Φ] the generalized antisymmetric gyroscopic matrix
• [DI ] = [Φ]T [DI ][Φ] the generalized internal viscous damping matrix
• [DA] = [Φ]T [DA][Φ] the generalized external viscous damping matrix
• [K] = [Φ]T [K][Φ] = diag[ω2
0] the generalized elastic stiffness matrix
• [DB] = [Φ]T [DB][Φ] the generalized anti symmetrical internal damping
matrix
For a rotating mass point, the terms are as it will follow.
The mass matrix is the same as for non-rotating structures. A lumped
mass approach is used here:
28

[M ] =
m
m
m
Jx
Jy
Jz
(3.2)
In the gyroscopic matrix, only the polar moment of inertia appears. With-
out any polar moments of inertia,there is no rotational effects in the fixed
system.
[C] =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 Jz 0
0 0 0 −Jz 0 0
0 0 0 0 0 0
(3.3)
The internal rotor damping matrix is given by:
[DI ] =
dI,x
dI,y
dI,z
dI,Rx
dI,Ry
dI,Rz
(3.4)
The external damping acting in the non-rotating bearings is as follows:
[DA] =
dA,x
dA,y
0
0
dA,Rx
dA,Ry
(3.5)
29

Because the displacements in the rotating part act as a velocity in the
fixed part, an antisymmetric matrix appears in the stiffness term :
[DB] =
0 dI,T 0
−dI,T 0 0
0 0 0
0 dI,R 0
−dI,R 0 0
0 0 0
(3.6)
In the previous matrices, the following notations have been used:
m mass
Jx inertia about the x-axis
Jy inertia about the y-axis
Jz inertia about the z-axis
dI viscous damping of rotor
dA viscous damping of rotor
The subscript T refers to "translation" whereas the subscript R indicates
"rotation". Moreover, in equation 3.6, the damping is assumed to be equal
in the x- and y-direction.
3.1.3 The Steiner’s inertia terms in the analysis
The ZSTEIN term is an option which can be found on the ROTORD card
(the rotordynamic entries are defined in this card) in the data file. This
allows to include the Steiner’s in the analysis. It is important to include this
term in the fixed reference system. In this case, the polar moment of inertia
is calculated as :
Jz = Jp = Σm(dx2 + dy2) (3.7)
WARNING: to use the ZSTEIN option, the nodes must have rotations.
In a model made of solid elements, this is obtained by adding a layer of
30

shell elements around the solid elements. One should also check if the nodal
rotations are not constrained by any optional cards.
3.1.4 Real eigenvalue analysis
The first step in a rotor dynamics analysis is to perform a real eigenvalue
analysis :
(−ω2
0[M ] + [K])ϕ = 0 (3.8)
The eigenvectors ϕ are collected into the modal matrix Φ. The dis-
placement vectors can be described by a linear combination of the modes:
u = [Φ]q. This is mathematically true if all modes are used. It is reasonable
when using a sufficient number of modes. The selected modes used for the
rotor dynamic analysis must be chosen according to these criteria:
• The frequency range of the real modes must be well above the frequency
range of interest in the rotor dynamic analysis
• The real modes should be able to describe the rotor motion. The modal
displacement in x and y has to be included
• The modes must be able to represent the generalized forces
3.1.5 The fixed system eigenvalue problem
For harmonic motion q(t) = q exp(λt), the following problem is solved in the
fixed reference system:
(λ2[M ] + λ(Ω[C] + [DI + DA]) + ([K] + Ω[DB ]))q = 0 (3.9)
A loop is made over the selected rotor speeds and the results are stored
for post processing.
31

Synchronous analysis
The eigenfrequency is equal to the rotor speed for the points crossing the
1P-line, i.e. ω = Ω. If the damping is neglected, λ = jω. To obtain the
resonance points, the following eigenvalue equation is solved:
(−Ω2([M ] + j[C]) + [K])q = 0 (3.10)
The imaginary parts of the solutions are the critical rotor speeds. For the
modes that do not cross the 1P line, the imaginary part is zero.
3.1.6 Solution interpretation
The solutions at each rotor speed are the complex conjugate pairs of eigen-
values λ = δ±jω. The real part is a measure of the amplitude amplification.
Having positive values leads to an increase in amplitude with time and so
the mode is unstable. The system is considered as stable when the real part
is negative. If the damping is assumed low, it can be defined as:
ξ =δ
ω(3.11)
In the complex modal analysis within NX Nastran, the output is the
g-damping defined as g = 2ξ.
The imaginary part of the eigenvalue is the damped natural frequency
of the solution. The eigenfrequency is thus f =ω
2π. The units that can be
chosen in Nastran will be shown in Chapter 4.
3.2 Equation of motion for modal frequency re-
sponse
Fixed reference system
The governing equation of the frequency response in modal space with rotor
dynamics terms, in the fixed reference system considering the load to be
32

independent of the speed of the rotation is:
(−ω2
k[M ] + jωk(Ω[C] + [DI + DA]) + ([K] + Ω[DB]))u(ωk) = p(ωk) for
k = 1, 2, ..., m
Here, m denotes the number of excitation frequencies of dynamic load.
This is called an asynchronous solution and applicable to cases like gravity
loads. The load could still have frequency dependence as shown by the m
discrete excitation frequencies defined on the FREQ card (see Chapter 7).
The rotor speed is constant and the asynchronous analysis is working along
a vertical line in the Campbell diagram.
In the case the load is dependent on the speed of rotation (called syn-
chronous analysis) is found putting ω = Ω. The governing equation is as
follows:
(−Ω2
k([M ] − j[C]) + jΩk([DI + DA] − j[DB]) + [K])u(Ωk) = p(Ωk) for
k = 1, 2, ..., n
Here n denotes the number of Ωk rotation speeds at which the analysis
is executed. Such is the case for example with centrifugal loads due to mass
unbalance. In this case the analysis is done along the 1P excitation line.
33

Chapter 4
Modelling of the 2D-3D rotor in
NX7
In this section, two rotors will be modelled in order to validate the models
created in NX 7. The results will be then compared with the theory if
possible. The rotor which will be analysed are a mid-span rotor and an
overhung rotor. The choice of both rotor has been done to try to model a
range of rotors as different as possible.
4.1 The middle span rotor (Jeffcott rotor)
4.1.1 The geometric modelling of the rotor
The parameters of the mid-span rotor are L = 1 m, ρ = 7800 kg/m3, E = 220
GPa, D = 1 m, d = 0.05 m and t = 0.1 m.
First of all, the model needs to be created under NX7. One have to open
a new part and start to "sketch" the model. Once the sketch is completed,
the solid body should be created by revolving the sketch around the z-axis.
The result of these operations gives the rotor figure 4.1.
Nonetheless, the design has to be studied before meshing. Indeed the
rotor can be modelled in two ways: either the rotor is made in one single
34

Figure 4.1: Revolution of the sketch of the rotor
part, or the shaft and the disc are made separately and glued together. The
choice of the model has an influence on the mesh. For reasons of accuracy,
the 2-part rotor will be used in the rest of the modelling.
4.1.2 Meshing
The mesh of the rotor is done in the Advanced Simulation application of
NX7. To be more accurate, a FEM file should be created and it is in this
section that the entire mesh will be completed. This section will be split
in categories (1D, 2D and 3D meshes), but in the order used to create the
model, i.e. the 3D mesh first, then the 2D mesh and the 1D to finish.
4.1.2.a The 3D mesh
Three important points have to be considered when meshing the rotor:
• The element type
• The element size
35

• For a 2-part rotor, the mesh mating condition between the contact
surfaces
The element type
Fundamentally, there are two types of 3D mesh which could be used. There
are referenced as CTETRA and CHEXA. The first one is a tetrahedron
whereas the second one is a 6-face element. Moreover in each element one
can choose either an element with nodes just in the corners or an element
with nodes in the corners and in the middle of the edges. For the CTRETA
element, it can be CTETRA(4) or CTETRA(10), and for CHEXA one can
pick CHEXA(8) or CHEXA(20). The number in parenthesis indicates the
number of nodes for each element. It is important to choose elements with
nodes on the edges because the accuracy will be much better using them.
WARNING: The elements with the greater number of nodes should
always be used. Indeed, the accuracy of the elements with only nodes in the
corner is really poor when simulating. For instance, the strains are constant
in a 4-node tetrahedron, which is the simplest solid element and which is not
very accurate [6].
In addition to this, a CPENTA element can sometimes be found in the
data file. This is an automatic creation by the software in some parts of the
rotor when the CHEXA-mesh is used.
After completing the 3D mesh, it is important to choose a material in
the properties of the 3D elements, e.g. steel, or create his own material (see
section 4.1.2.d), otherwise the simulation will not be launched.
The element size
The size of the element chosen throughout the body has an effect on the
overall results. If one select a too large size, this can result in a rotor which
is farther from the initial model. Indeed the shaft of the rotor can look more
like a polygonal object than a cylindrical one. To make a first test, the best
36

Figure 4.2: Type of solid elements
way is to try an action called "Automatic Element Size" in Nx. This is
a good approach to start with, but then it can be modified manually to find
the best results. Then one can choose smaller elements through the shaft
and the span, but the effect will be that the fastness of the simulation will
drop down as the size of the element decreases. Therefore a compromise
should be found to have both good results and a rather good quickness of
the simulation.
The mesh mating condition
As the rotor can be divided in several parts, it is important that the meshes
should be well-connected, the nodes being the same between the contact sur-
faces. This is done by using a command in the fem file called "Mesh Mating
Condition". If this is not done, the simulation will result in displacements
of both the shaft and the span totally disconnected, being independent from
each other.
4.1.2.b The 2D mesh
For this example, the 2D mesh will be used just for one goal. Indeed, to have
the analysis in the fixed reference system, it is necessary to put the ZSTEIN
entry to YES in the rotor bulk section (cf Chapter 5) and that the nodes have
rotations. In a model with solid elements, this can be done by adding a layer
of shell elements around all the solid elements.These shell elements have a
37

negligible effect on the model’s overall stiffness. When using this option, one
must ensure that the nodal rotations of the shell elements are not constrained
by the AUTOSPC option.
To insert all these shell elements in NX in the advanced simulation win-
dow, the path to follow is: Insert->Element->Surface Coat. Then all the
solid elements should be selected. There is no need to choose the type of
element (i.e. CQUAD8 or CTRIA6) as the creation will be automatic.
Once this is done, the properties of the shell elements has to be completed.
The two most important ones are Material 1 and Default Thickness. In this
model, the material will be steel and the shell elements will be 1 mm thick.
Figure 4.3: Properties of the shell elements
4.1.2.c The 1D mesh
The 1D mesh elements will be found at both ends of the rotor. All these 1D
elements will be connected to each other to the central point of the rotor.
38

But as the software does not allow to connect for example one spring from
one node to the same, it is useful to create 3 nodes in the middle of each end
surface.
As the connection between the 3D elements and 1D may cause some
problems, it is important to insert a rigid connection between the bearings
and the end surface. Then the bearings will be attached to this connection
and a end constrained point. To sum up, there are 3 types of 1D connections
in the model:
• The rigid connection (RBE2)
• The bearings (CELAS1)
• The damping of the bearings (CDAMP1)
The rigid connections
There are two types of rigid connections inserted into the model: one between
all the points of the end surface and the middle node of this same surface and
another connection from this middle node to the bearing node (both nodes
have the same coordinates).
The first connection is called "spider connection". One have to go in
Insert->Mesh->1D Connection, to choose Node to node in the connection
type box, to select RBE2 in the type of element. Then the central node has
to be selected as a source and all the other nodes of the surface should be
selected as a target. Plus the rotational degrees of freedom have to be let
free to allow rotations in X,Y and Z. Doing that, there will be no problem of
connection while simulating.
The second connection is made in the same way as the previous one,
excepted that the source is the same but the target node is one at the same
coordinates which has been created before. Plus all degrees of freedom need
to be constrained in this RBE2 connection.
39

Figure 4.4: Connections of 1D elements at the end of the shaft (ref [2])
The most important thing to remember is that one should be careful in
which sense to connect these nodes, otherwise over-constrained nodes may
appear when putting the end constraints.
40

Figure 4.5: The "spider" rigid connection (in blue)
The bearings and damping of bearings
The bearings and damping of bearings need to be inserted between the second
node and the third node created in the middle of the end surface. As the RBE
connection, it can be found in Insert->Mesh->1D Connection by changing
the type of element. In this model, two bearings will be created as well as
damping of bearings in the X and Y-direction.
For the viscous damping (external), a small value has been chosen in
order to avoid numerical problems as a start. The value has been fixed to
107 N.m for the stiffness.
4.1.2.d Material
There is two choices concerning the choice of the material: either one pre-
defined material can be selected (such as Isotropic Steel), or a new material
can be created. It is better to create an own material as the inserted values
would be then the real ones. It is also in this case that one can put some
value for the internal damping, as the predefined material do not have it (and
the values of the predefined material cannot be changed).
41

4.1.3 The boundary conditions
As shown on figure 4.4, both end nodes will be totally constrained (i.e. the six
degrees of freedom). To do that, one have to go in User Defined Constraint
in the simulation file. Then the nodes must be selected one by one and all
degrees of freedom have to be fixed.
Then the end nodes of the rotor should be constrained as the beam is
simply supported. That means one have to proceed as before, but only the
displacements in the x,y and z-directions are fixed as well as the rotation
around the z-axis.
Once all of this done, the first step is to analyse the eigen-frequencies of
the rotor to see if the mesh is satisfying. Then the rotor dynamics entries
can be inserted into the ".dat" file.
4.2 The Overhung Rotor
The aim of studying this rotor is that unlike the mid-span rotor, the eigen-
frencies of the first modes will not be the same as the rotor speed increases,
because of the gyroscopic effects. Due to that, all types of simple rotors can
be studied whatever their geometry. Plus as the boundary conditions are
changed, one have to find another way to put the bearings in this model
without affecting the overall results.
4.2.1 The geometric modelling of the rotor
The parameters of the mid-span rotor are L = 1 m, ρ = 7800 kg/m3, E = 220
GPa, D = 1 m, d = 0.05 m and t = 0.1 m (see figure 4.6).
As the mid-span rotor, the overhung rotor will me modelled with two
parts, i.e. the shaft and the disc. Then the control of the size of the mesh is
much easier.
Once the sketch is done regarding the dimensions, one have to revolve it
to finally obtain the 3D-rotor (figure 4.7)
42

Figure 4.6: The overhung rotor model
4.2.2 1D-Meshing
As the 3D-mesh and 2D-mesh will be the same as in section 4.1.2, the 1D
mesh will be emphasized as the boundary conditions differ from the mid-span
rotor.
Indeed, it is impossible to put the bearing as in the mid-span rotor because
it will not be taken in the analysis proceeding in this way. Thus the idea
is to create a small cage around the end of the rotor in order to be able to
connect the bearings from this "cage" to the rotor.
Figure 4.7: General View of the 3D-rotor
43

But still some problems can appear by working like this. How many nodes
have to be created to be sure that the boundary condition are respected? How
many bearings should be created and to which rotor nodes should they be
connected? What is the value of each bearing as several are connected to
each other?
The answers to these questions will be analysed and discussed with the
results of the simulation. But to start with something, the idea is to create
three bearings on each side of the small outside cage and connect them to
two center points of the rotor (one for each side).
Figure 4.8: Cage surrounding the shaft with bearings
If the results are satisfying, this model will be considered as a good one,
otherwise some elements will be changed. Another important thing is that
small damping will be introduced first to avoid numerical issues, trying to
be as more time-saving as possible.
Concerning the 2D and 3D mesh, it is exactly the same for the Jeffcott
rotor.
44

Chapter 5
Defining NX Nastran input for
rotor dynamics
The aim of this chapter is to describe the main commands to properly analyse
the rotor and structure and show how to process the results. Indeed, as
described in chapter 3, the solution used is the analysis of modes also known
as SEMODES-103. But to run the rotor dynamic analysis, one need to run
solution 110 (complex modal) which is not supported by NX7. Thus once the
solution has been launched, one have to Write, Edit and Solve in the Solution
Attribute Box and save the text file as a .dat file. Then modifications can
be done manually by opening the .dat file and adding the bulk data entries
of the rotor as well as changing the file management section, the executive
control section and the case control section.
5.1 Modifications of the .dat file
5.1.1 The file management section
In the file management input file, one should assign statements to have results
files which will be used for post-processing. These files generated by the
software are called GPF and CSV. To get it, the followings statements need
to be written in this section:
45

assign output4=’name_of_file.gpf’, unit=22, form=formatted
assign output4=’name_of_file.csv’, unit=25, form=formatted
The file to be used within NX7 will be the CSV file which is an excel file.
It contains values such as rotor speeds, eigen-frequencies or damping values.
This file then will transform in an AFU file to process the Campbell diagram.
This will be done using a journal called CampbellCSVtoAFU.vb (available
in the UGS directories).
5.1.2 The executive control section
In the Executive Control Section of the input file, the following command
SOL 103 has to be replaced by the command solving the Modal Complex
Eigenvalues, i.e. SOL 110.
5.1.3 The case control section
In the case control section, the RMETHOD entry is used to invoke the rotor
dynamics capability (RMETHOD = n). The number n refers to the RO-
TORD entries containing and SID = n option. The number of rotors is
specified by the number of continuation cards following the first continua-
tion card of the ROTORD entry. But in most of the examples which will
be studied, just one rotor will be specified corresponding to one continuation
card.
In modal dynamic response and rotor dynamic analyses, one should first
perform a real eigenvalue analysis and examine the modes before proceeding
to the next step in the analysis. With the rotor dynamic analysis, it is helpful
to be able to deselect local modes or other modes such as axial modes.
The following MODSEL entry lets one select or deselect specific modes
(MODSEL = n). Here n refers to a SET card that holds the list of selected
and retained mode numbers. The default is all modes in the model. The
46

numbers omitted from the list are removed from the modal space. Moreover,
numbers larger than the number of eigenvalues computed are ignored.
An entire example of the entries can be checked in Appendix B.
5.1.4 The bulk data section
For the rotor dynamics analysis, one should define all relevant rotor dynamics
data on the ROTORD bulk data entry. With the ROTORD entry, the main
card and the first continuation card contain information that is common to
all the rotors present in the system. To specify rotor information, one or more
continuation cards have to be used. The fields assignments are as follows:
Here are the names of the field and what are the contents:
• SID: sets and identifier for all the rotors. In the case control deck, one
must selected RMETHOD = SID.
• RSTART: starting value of the rotor speed.
• RSTEP: step-size of the rotor speed.
• NUMSTEP: number of steps for the rotor speed including RSTART
• REFSYS: the reference system is chosen. It could be either the fixed
reference system (FIX) or the rotating reference system (ROT).
• CMOUT: rotor speed for complex mode output request.
• RUNIT: units used for rotor speed input (RSTART and RSTEP) and
output (units for output list and Campbell’s diagram). Can be either
RPM, CPS, HZ or RAD.
• FUNIT: units used for the frequency output (RPM, CPS, HZ or RAD)
• ZSTEIN: option to incorporate Steiner’s inertia terms (default = NO)
• ORBEPS: threshold value for detection of whirl direction (default =
1E-6)
47

• ROTPRT: controls .f06 output options
• SYNC: option to select Synchronous or Asynchronous analysis for fre-
quency response (Synchronous: =1, Asynchronous: =0
• ETYPE: excitation type (Mass unbalanced: =1, Force excitation: =0)
• EORDER: excitation order (always =1 for the fixed reference system)
• RIDi: rotor ID for output identification; must be unique with respect
to all other RIDi values.
• RSETi: set number for grid points of rotor i. By default, all grid points
if only one rotor.
• RSPEEDi: relative rotor speed for rotor i.
• RCORDi: points to CORD** entry (coordinate system entry card)
specifying rotation axis of rotor i as z. (default = 0 for global z axis)
• W3i: reference frequency for structural damping defined by PARAM
G for rotor i
• W4i: reference frequency for structural damping defined on material
card for rotor i
• RFORCEi: points to RFORCE bulk data entry for rotor i. (Default
= 0 for no rotational force applied; a rotational force is required for
differential stiffness to be calculated.)
In figure 5.1 is shown an example of the rotor dynamics entries inserted
in the .dat file:
5.2 Interpretation of rotor dynamics output
When a rotor dynamics analysis is performed with NX Nastran, the software
writes the results into a .f06 file,an .op2 file and two ASCII files.
48

Figure 5.1: Data entries of the rotor dynamic analysis
5.2.1 The .f06 file
In the first part of the .f06 file a list of the rotor speeds, complex eigenvalues,
frequency, damping and whirl direction is printed. The software prints one
table for each solution.
In the second part of this file a summary of the results from the Campbell
diagram is printed. It includes the resonance of forward whirl, the resonance
of backward whirl, instabilities (points of zero damping) and critical speeds
from the synchronous analysis (only for analyses in the fixed system).
Moreover, if a simulation does not end properly, it is in this file that
the errors will be specially determined and thus the .dat file can be changed
according to these mistakes.
5.2.2 The .op2 file
If PARAM,POST,-2 is set into the input file, NX Nastran writes the results
into a file named ".op2 file". This file contain everything, i.e. the geometry
of the rotor, the fem and the results of the simulation. The modes can be
plotted with NX7 by importing this file. The processing will be explained
more accurately in the next part.
49

5.2.3 The .csv file
In addition to write the results to the standard NX nastran .f06 and .op2
files, a specially formatted file called .csv can be chosen by the software. The
.csv file contains data concerning the Campbell diagram. It can be processed
by using excel, or using the journal described in section 5.1.1 .
Figure 5.2: Diagram of the entire rotor-dynamics procedure
50

5.3 Procedure to perform an entire rotor dy-
namics simulation
To use the rotor dynamics software properly, a step by step procedure is given
to avoid as many errors as possible while simulating. Here is the summarized
procedure:
1. The geometric model has to be created under the modelling section
(File->new and create a .prt file).
2. Once the rotor is created, go into the advanced simulation to create
both .fem and .sim files. Here the solution SEMODES 103 has to
be used. In this part the meshes has to be created as well as the
constraints.
3. Once the model is completed (make a Model Setup Check), run the
simulation as Write, Edit and Solve Input File. A text file will
appear, save it as a name.dat file and close it.
4. The simulation runs. Once is finished, the results can be checked in
the Post Processing Navigator.
5. If the results seem correct (compared with the theory for instance), the
rotor dynamics cards can be written in the .dat file as explained in
section 5.1. Once the file is saved, the simulation has to be run with
NX Nastran.
6. If the simulation succeeded, the results can be checked in NX7. The
file has to be imported as an .op2 file under the Advanced Simulation
section.
7. Once imported, the Campbell diagram can be plotted by using the
macro CampbellCsvToAfu. The right .csv file should be taken and
converted. The diagram can be seen in the Simulation Navigator.
8. If the results are not satisfying (strange modes, bad range of frequen-
cies,...), changes can be made in the .dat file and the simulation be run
again.
51

IMPORTANT: If the simulation has not run entirely, the .f06 can be
checked to find the reason of the simulation’s abortion
52

Chapter 6
Analysis of the results
In this chapter, two main results will be discussed. First of all, the natural
frequencies of the rotor are checked before proceeding to the rotor dynamic
analysis. Once the eigenfrequencies seem to be satisfactory, then the Camp-
bell diagram will be analysed (concerning eigenfrequencies, damping values,
whirl direction,..) and compared with the eigen-frequencies of the theoretical
model.
6.1 The middle span rotor
The results of the eigenvectors (mode-shapes) are well-known for this type or
rotor. Indeed, the first one is associated to a translation mode whereas the
second mode is a tilting mode. In this case, the translational and the rota-
tional modes are uncoupled. The modal simulation of the model introduced
in the chapter 3.1 gives these shape results in figure 6.1 .
The eigen-frequencies are not given here but they will be given in the
next section depending on the accuracy of the mesh.
6.1.1 Quality of mesh and accuracy
As said in section 3.1.2.a, two main parameters are important when meshing:
the mesh size and element type. To check the differences in the results
53

Figure 6.1: Translation and tilting mode of the mid-span rotor
according to the mesh, these parameters will be taken into account:
• the type of element will be chosen between CTETRA4 and CTETRA10
(plus one test with CHEXA(20))
• the size of the elements will be only changed for the disc and will remain
the same for the shaft (the size are 160, 80 and 40 mm to have several
layers over the thickness of the disk) excepted for a few examples
The results of these simulations are put in Table 6.1.
If the size of the shaft is not specified, that means by the value by default
is 52.4 mm. As the mesh number 6 (CTETRA(10), disk: 170mm, shaft:
52.4 mm) give pretty accurate results with relatively high speed computer
calculations, it will mainly be proceeded in that way for the next meshes to
come. That means that CTETRA10 will be used using an automatic creation
(the sized is automatically fit with the geometry by the program).
6.1.2 Campbell diagram
Critical speeds
The Campbell diagram is a plot of the eigenfrequencies as a function of the
rotational speed. On it can be checked the value of the eigen-frequencies at
54

Figure 6.2: Example of a CHEXA(20) mesh and the eigenfrequencies
element size (mm) freq 1 (Hz) freq 2 (Hz)
CTETRA(4) 170 12.87 27.63
CTETRA(4) 80 12.81 27.67
CTETRA(4) 40 12.75 27.80
CTETRA(4) 20 12.74 27.80
CTETRA(4) 20 (disk and shaft) 11.56 25.18
CTETRA(10) 170 10.86 23.61
CTETRA(10) 80 10.85 23.64
CTETRA(10) 80 (shaft:30) 10.77 23.47
CTETRA(10) 40 (shaft:30) 10.75 23.47
CHEXA(20) 216 (shaft:13.2) 10.68 23.17
Table 6.1: Eigenfrequencies values depending on the mesh
55

ω = 0 rad/s, the linear, backward or forward whirls and the critical speeds.
The first eigen-frequencies can be checked theoretically to see if the re-
sults are acceptable. For the translation mode, the translational stiffness
is kt = 48EIL3 = 3.106N/m and thus the frequency corresponding is ω1 =
√
kt
m=√
3.106
616= 69.78rad/s = 11.10Hz. For the tilting mode, the ro-
tational stiffness is kr = 12EIL
= 1.106N/m and the frequency associated
ω2 =√
kr
Id
=√
1.106
39.5= 159rad/s.
The first eigenfrequencie is 10.98 Hz for the green and yellow line, the
second one is 23.88 Hz (see figure 6.3). These values are a bit different
from the modal analysis done before but one has to remember that some
rigid connections and bearings have been added so that the results can be
influenced.
The green and yellow line do not vary with the rotational speed. This is a
typical result of a midspan rotor, i.e. the eigenfrequencies of the translational
modes are constant whatever the speed (there is no gyroscopic effect). Then
the dotted-red line indicates a backward motion whereas the blue line shows
a forward one. Thus all motions presented here match with the theory of the
midspan rotor.
However, the third and fourth modes are purely rotational motions of
the disk without translational displacements. These two modes split in two
direction with the rotor speed, and two planes of motion are coupled due to
the gyroscopic effect.
In figure 6.3, the critical speeds can be observed when the curves are
crossed by the 1P-line. Thus in this model three critical speeds are observ-
able, one forward and two backwards. The critical speeds are given in Table
6.2.
These results are given for some specified values that have an impact on
the critical speeds. For instance the thickness of the shell elements (added
to have nodes rotations), the internal damping can modify these results. A
study will be done according to these parameters too.
56

Figure 6.3: Campbell diagram for the midspan rotor
type of mode whirl eigenfrequency (Hz) critical speed (RPM)
bending backward 10.98 658.4
bending forward 10.98 659.0
tilting backward 23.88 1015
tilting forward 23.88 -
Table 6.2: Eigenfrequencies and critical speeds for the Jeffcott rotor
Damping
As said in Chapter 2, internal damping has a destabilizing effect. Thus the
rotor can become unstable over critical speeds.
The relation between the undamped natural frequency and the shaft
speed where the instability occurs is given by [5]:
57

Ω0 = ωn(ce + ci
ci
) (6.1)
As the external damping was considered very low in the simulation, it
can be checked that the instability occurs at the first critical speed. Indeed,
it appears at the value of 684 RPM (where the damping value is zero).
Figure 6.4: Damping values as function of the speed
In this example, it is important to notice that the first two eigenvalues
have the same imaginary part (damped natural frequencies) but two different
real parts (damping exponents). At zero speed, the two modes have the same
damping factors. As the speed increases, the cross-coupled stiffness due to
internal damping increases. Thus it shows that internal damping destabilizes
the forward mode and stabilizes the backward mode.
58

6.1.3 Parameters influencing the results
As said in the previous section, some parameters can change the results. The
fact is too know how much it differs when changing one value and see if it
can be controlled properly.
Thickness of the shell elements
In the built model, it has to be remembered that a thin layer has been added
to the 3D model to assure rotation of all the nodes. When inserting this
shell-elements, the thickness of the layer is asked otherwise the simulation
cannot run.
Several thickness’s have been tested. The results are given in Table 6.3.
thickness (mm) 0.01 0.1 0.3 0.7 1 5 10
critical speed 1 654.6 658.4 666.6 682.6 693.9 815.0 922.4
critical speed 2 655.3 659.0 667.2 682.6 693.9 815.3 922.9
critical speed 3 1010 1015 1026 1047 1062 1214 1339
critical speed 4 12866 14145 18971 - - - -
Table 6.3: Critical speeds of the Jeffcott rotor for different shell thickness
It can be seen that for an overall thickness greater than 1 mm, the results
begin to be totally wrong. But for smaller values, the change in critical
speeds is less accentuated. However, a fourth critical speed appears when
decreasing the thickness. This means that the slope of the forward tilting
eigenfrequencies drops as well as the thickness.
Material internal damping
Some tests have been made changing the internal damping (0.01, 0.05, 0.1,
0.3, 0.5 and 0.8). As the results do not change significantly and the reason
of these small changes are unknown, the table of results is not presented
here. Nonetheless internal damping will be studied more accurately in the
frequency response analysis as its influence is much bigger.
59

6.2 The Overhung rotor
As for the Jeffcott rotor, the first two modes will be studied. Both the modes
and the Campbell diagram will be totally different from the Jeffcott rotor.
Indeed, both the stiffness and gyroscopic matrices are different according to
the theory. That is why this example have been checked.
In this section, the results will been given for some typical values accord-
ing to those used in the Jeffcott simulation. No general studies will be made
according to the thickness of the shell elements, internal damping or stiffness
as the influence of them have been evaluated in the Jeffcott section. There is
no internal damping in this case, just external damping. The value of each
stiffness is 1.107 N/m.
6.2.1 Mode shapes and Campbell diagram
Figure 6.5: 1st and 2nd modes shapes of the overhung rotor
As figure 6.5 shows, both modes can be said to be tilting modes. The
first eigenfrequency is 2.44 Hz and the second one is 14.60 Hz. Since the
disk is totally located off-center, the translational and rotational motions are
coupled. Also two planes of motion are coupled by the gyroscopic effect.
60

type of mode whirl eigenfrequency (Hz) critical speed (RPM)
coupled backward 2.44 135
coupled forward 2.44 157
coupled backward 14.60 658
coupled forward 14.60 7083
Table 6.4: Eigenfrequencies and critical speeds for the overhung rotor
As a result, all the natural frequencies are affected by the disk gyroscopic
moments. The natural frequencies associated with forward whirl increase as
the speed increases, and the natural frequencies associated with backward
whirl decrease as the speed increases.
Figure 6.6: Campbell diagram for the overhung rotor
From Table 6.4, it can be seen that a fourth critical speed appears when
simulating. But as shown in the Campbell diagram, this one cannot be
61

checked as the simulation was run till 300 RPM, so this critical speed should
not appear. It can be assumed that an interpolation is made for the fourth
curve, and thus maybe this one crosses the 1P-line which naturally gives this
new critical speed. But still it cannot be sure that it is a good value.
62

Chapter 7
Solving the mass unbalance
problem
The aim of this chapter is to perform mass unbalance problems for the Jeff-
cott and the overhung rotor. With NX Nastran, both synchronous and asyn-
chronous analyses can be performed. This analysis will always be performed
after the solution 110 to check if the results match with theory.
To make this modal analysis, some additional rotor cards should be in-
serted and the solution has to be changed too.
7.1 Mass unbalance cards and modal frequency
analysis
7.1.1 Additional cards in the bulk data section
In the rotor bulk data section, three cards will be added. There are called
SYNC, EORDER and ETYPE. Each card has an accurate meaning.
• SYNC: option to select synchronous or asynchronous analysis for the
frequency response (synchronous = 1).
• EORDER is the excitation order.
63

• ETYPE is the excitation type. There is two types: either the mass
unbalance m ∗ r is specified on the DLOAD card and the program will
multiply by Ω2 (ETYPE = 1), or a force excitation mrΩ2 is defined on
DLOAD (ETYPE = 0)
For calculating the modal frequency response using the synchronous, the
rotation speeds are defined by RSART, RSTEP and NUMSTEP in the RO-
TORD entry. On the contrary, for asynchronous analysis, the unique rotation
speed is defined by RSTART. The RSTEP and NUMSTEP entries are ig-
nored. The frequency increments will be put into a card called FREQ in that
case.
7.1.2 Dynamic load
To perform the analysis, it is important to define the dynamic load, for
both the mass unbalance or the force excitation. According to NX Nastran,
the DLOAD is associated with an RLOAD1 entry which specify the load
properties. The RLOAD1 card defines a load as follows:
P (f) = A[C(f) + iD(f)] exp(i(θ − 2πfτ) (7.1)
τ is defined by the card DELAY, θ by DPHASE, C(f) and D(f) by two
table entries and A by DAREA. The type of the dynamic excitation is a
load, defined by type = 0 (see figure 7.1). The nodes and directions where
the force is applied are put into the DAREA card.
In our case, the following values are created: τ = 0, A = 1, D(f) = 0,
C(f) = 1 (no frequency dependence). Concerning θ, it can have several
values. Two RLOAD1 will be created to have a rotating force. For the
first one, θ = 0. For the second one, it will be either +90 or −90 degrees.
Proceeding like this allows to first check the forward whirl and then the
backward one. This is more considered as a trick to create a rotating force.
The dynamic load can be put wherever on the structure. But the nodes
have to be checked previously if one want to put the force correctly. For
64

Figure 7.1: Bulk data entries for the dynamic load
instance, one rotating force (two RLOAD1) can be set in the middle of the
disc to check the bending response, whereas one force can be put on the edge
of the disc to check the tilting response.
Figure 7.2: Visualization of the dynamic load
Once all these cards are inserted, the .dat file has to be run in NX Nastran.
65

7.2 Mass unbalance response of the Jeffcott ro-
tor
7.2.1 Synchronous analysis with internal damping
For this analysis, the force excitation magnitude will be fixed to m ∗ e =
193kg.mm . As the results for the bending response can be seen with the
tilting response, only the second one will be simulated, it means that one
dynamic force will be created on the edge of the shaft at the outer surface
of the disc to excite both modes at the same time (exactly at the node 2561,
see figure 7.1). The analysis is perform from 0 to 30 Hz with a step of 0.1
Hz.
Concerning the modelling, only internal damping is inserted, with a
damping ratio ξint = 0.1 . Concerning the external damping, the value is
c = 1kg/s which can be disregarded, so that ξext = 0.
WARNING: It is important to write the suitable units of the magnitude
excitation in the .dat file in order to have good results. Indeed, the units used
are not part of the International System of Units. The unit is here kg.mm
As a synchronous analysis is performed, the card entries are as follows:
SYNC = 1, ETYPE = 1 and EORDER = 1 in the fixed reference system.
Backward whirl
First the backward simulation is performed. The results of the Campbell can
help to predict where the maximum displacements will appear. Indeed, it
should appear when the 1P-line crosses the backward solutions, i.e. at the
first and third critical speeds, respectively 658 RPM and 1015 RPM.
The magnitude response will be plotted for the displacement and the
rotation at the node 1521.
The results with NX gives a maximum displacement of 1.96 mm at the
frequency of 10.1 Hz for the bending mode. Concerning the tilting mode,
66

Figure 7.3: Displacement for the backward whirl
the maximum response can be checked by plotting the nodal rotation. The
maximum rotation is 0.10 degrees for a frequency of 15.8 Hz.
In order to partially check the results, the displacement will be plot as
a function of the rotational speed using Matlab. Theoretically ([?]), the
displacement for the Jeffcott rotor is given by:
X =1
√
(1 − r2)2 + (2ζr)2
meω2
K(7.2)
In that case, me = 193kg.mm, r =ω
ωn
with ωn =
√
kt
m, K the stiffness
of the bearing (K = 5 ∗ 107N/m), and ζ = 0.1 the damping.
67

Figure 7.4: Rotation for the backward whirl
According to these results, the maximum displacement should appear at
r=1, i.e. ω = ωn. Both the maximum amplitude and the end amplitude
match with the numerical simulation. As a result, the model can be said to
be correct and thus the other simulation could be correct too. It would be
certainly better to check analytically the results for each test but it will be
impossible to proceed in that way for the real rotor or even the overhung
one. Indeed, the theoretical results are much more complicated to obtain
these cases.
Forward whirl
The parameters are exactly the same as the backward whirl. Just the phase
is changed in the second RLOAD1 force from -90 to 90 degrees.
In this case, the Campbell diagram should show only one maximum dis-
68

Figure 7.5: Theoretical displacement calculated with Matlab for the backward whirl
placement, the same as the backward whirl (659 RPM). Thus the curve
should be the same with no second peak in this range of frequency.
When plotting the displacement, the peak is at the same frequency but the
width of the peak is less pronounced, that means the damping ratio should be
smaller. But as it was not changed in the analysis from the backward to the
forward, the curve should be exactly the same as the backward whirl. As a
result, the internal damping can effect the results, but it should be admitted
that the control of it is not easy, giving here strange damping ratios for the
forward whirl. Indeed, the material damping is not really well explained in
the NX Nastran guide, thus it is hard to know what is the influence of it.
69

7.2.2 Synchronous analysis with external damping
In that case, no internal damping will be included (ξint = 0), but the external
damping will be much higher with ξext = 0.1. The important is to find the
good value for the viscous damping C in order to get the expected damping
ratio (see equation 7.3).
This one is defined by ξ =C
2√
Kmwhere C is the total damping and K
the total stiffness (C = 2C and K = 2K in this case). So this gives:
C = ξ√
Km (7.3)
The numerical application of this formula gives C = 0.1∗√
5 ∗ 107 ∗ 616 =
1.75 ∗ 104 kg/s. But when this value is used for the damping, it seems that
the damping ratio is lower that expected. Thus the viscous damping has
to be increased compared with the theoretical value to have ξ = 0.1. This
phenomena could be due to the fact that at the end points of the rotor,
the damping is not only connected in parallel with a spring but connected
in parallel with a spring and in series with another spring. This system is
called the "one and a half degree of freedom" (because there is 3 degrees of
freedom in the eigenvalue problem instead of 4).
Figure 7.6: One and a half degree of freedom system
To see the influence of the external damping, several curves have been
plotted to see the evolution of the peaks according to the damping ratio (see
70

figure 7.7). As expected, the width of the peaks really depend on the value
of the damping ratio. If the value of ξ is small, thus the peak will be more
narrow and the magnitude greater. As ξ increases, the peak becomes wider
and the magnitude decreases too. For a value of ξ ≥ 0.707, no more peak
can be observed. One can notice that the displacement value when f → ∞is the same for all curves. This value is exactly the same as found with the
model with internal damping ( d(f → ∞) = 0.37 mm).
Figure 7.7: Displacement response for several damping ratios
71

7.2.3 Asynchronous analysis
For the asynchronous analysis, the response is calculated along a vertical
line in the Campbell diagram. The rotor speed is constant in this analysis
and is defined by RSTART. NUMSTEP and RSTEP are both equal to 1.
The FREQ1 card defines the frequency range of the analysis. The value of
EORDER has no effect in this analysis (as the response is calculated along
a vertical line). A mass-unbalance excitation is chosen here.
To have results in the frequency range that is studied and to see the
differences of this analysis and the synchronous one, the value of the rotor
speed is fixed to 1500 RPM (25 Hz).
Figure 7.8: Displacement for the backward whirl of the asynchronous analysis
72

Backward whirl
As the maximum displacement should occur where the vertical line at 1500
RPM crosses with the backward curve, that means that the maximum dis-
placement should appear at the same location as the synchronous analysis,
i.e. at 10.9 Hz more or less. The second peak for the tilting mode should
appear at 14.1 Hz. Both the displacement and rotation confirm these results
(see figure 7.8 and 7.9)
Figure 7.9: Rotation for the backward whirl of the asynchronous analysis
Forward whirl
As the aim of the asynchronous whirl was to check if the analysis work, the
results will not be developed for the forward whirl, assuming that they are
accurate enough and seem to work for the backward whirl. Even if this analy-
sis seem not to be interesting in the mass unbalance problem (compared with
73

the synchronous analysis), it is still recommended to perform this analysis
according to the NX Nastran guide.
7.3 Mass unbalance response of the overhung
rotor
The way to perform the mass-unbalance problem is exactly the same as the
Jeffcott rotor. The only difference is that the node where the dynamic load
will be applied has no importance as the first two modes will be excited at
the same time (wherever the force is put).
Concerning damping, only external viscous damping has been inserted
(c = 5 ∗ 107kg/s), as the control of the internal one is not domesticated. The
other parameters of the rotors are exactly the same as the one used when
checking the Campbell diagram.
Only the synchronous analysis will be studied in this section, the asyn-
chronous analysis has been used mostly to explore the NX Nastran capabil-
ities and see if it worked.
Backward whirl
According to the Campbell diagram, two maximum displacements should
occur when doing the backward simulation: the first one at 136 RPM (2.26
Hz) and the second one at 658 RPM (10.96 Hz) according to the results in
the .f06 file. The plot of the displacement of node 909 shows that the values
are quite the same ( 1.4 Hz and 10.1 Hz), even if the frequencies are both
under-evaluated.
Concerning the first peak, the matters is that it is more a "double-peak"
appearing at the frequency 1.4 Hz and 1.7 Hz, as if both the backward whirl
and the forward whirl have been excited. The reason of these two peaks is
still not determined.
74

Figure 7.10: Displacement of node 909 for the backward simulation
Another important remark is that the width of the peaks do not change
even if the external damping is increased, unlike the results obtained with
the Jeffcott rotor. It is as if it was not considered in the entire analysis.
Maybe this could be due to the specific "1 and a half degree of freedom" of
the system, the stiffness can be too high and affect the effect of damping.
The interesting thing would be to try to make some other tests by reducing
the stiffness and check if the damping have an influence. Otherwise, the mesh
of the end of the shaft should be done in another way to try to get better
results.
Forward whirl
The phase is again changed from −90 to +90 degrees. All the other param-
eters are the same.
A short look at the Campbell diagram tells that a first peak will appear
75

at 158 RPM ( 2.6 Hz). A second peak should appear but far away, at 7 083
RPM ( 118.5 Hz). As the simulation is run from 0 to 50 Hz, the second
peak cannot be seen entirely on the plot of the displacement. Indeed, the
displacement curve matches with these expectations, even if the first value
is still under-evaluated, but the beginning of the second peak can be seen.
Figure 7.11: Displacement of node 909 for the forward simulation
For this model, it can be checked that some improvements have to be
made to have better results. But for the time being, the study of the realistic
model will be done considering that the first models are good enough.
76

Chapter 8
Modelling and analyses of a more
realistic rotor
The aim of this chapter is to model a more realistic rotor as well as the the
non-rotating structure and the interactions components (mainly bearings).
The model created will be simpler but as realistic as possible for the time
being (see Appendix D for a view of the entire structure). For further exper-
iments the model can be updated and some new parts can be integrated too.
One has to remember that the first aim is to see what are the possibilities of
analysis for such big structures and check if they are done in a proper way.
Once the simplest models are validated, step by step improvements can be
done to reach a "perfect model" in the near future.
In order to do things properly, the rotating part and the bearings will be
analysed to check if the results are correct. Then the non-rotating structure
will be added and the influence of this one will be observed.
8.1 Modelling of the rotating part
As in previous chapters, the geometric model has been created under the
Modelling section of NX7. This part is made up of a shaft, several disks and
blades. The blades will be first disregarded as it can introduce additional
problems.
77

The shaft modelling has been decomposed in several parts (it is cut at
each bearing support) so that some mesh points can be inserted and make
the general mesh easier.
Figure 8.1: Rotor modelling with blades
8.1.1 Meshing
As an accurate description of the meshes has been done in Chapter 3, a
general view of how the mesh has been proceeded will be given part by part.
Mesh with solid elements
Only the shaft will be meshed with solid elements. The type of element used
is CXEHA(10). For the size of the mesh, Automatic Element Size has been
chosen. As said before, some mesh points have been inserted in the middle
line of the shaft to connect the bearings stiffness.
As there are several parts in this rotor, each part should be meshed inde-
pendently. But as the rotor should be analysed in one whole part, the meshes
between all these parts should match. So before making the 3D-mesh, it is
important to insert several mesh mating conditions between the connected
faces. Doing that, all the different meshes should be connected with each
other.
78

Figure 8.2: Real rotor to be modelled
Mesh of the blades
To start with simple simulations, the blades are not meshed yet. But then
they will be modelled either with shell elements or solid elements. As stiffness
problems may happen with the shells elements, the rotor will be first meshed
into solid elements. Indeed, if the blades are meshed with shell-elements,
the NX Nastran documentation [2] indicates that a RFORCE entry has to
be created to calculate the "geometric (differential) stiffness matrix. As this
RFORCE card is difficult to use, the choice of solid elements is made even if
the simulations could take a longer time.
To get the end of the rotor and the blades meshed correctly together, the
best thing is to use the command Unite in the modelling part. Then the
connection points will automatically coincide.
79

Figure 8.3: Meshing of the blades
Shell elements will be used for the non-rotating structures surrounding
the bearings. This will only be used to attach the bearings (it is the simplest
way to create nodes) but it will be deleted then, excepted the connection
nodes (see figure 8.3).
Mesh with 1D-connections
As for the overhung rotor, the stiffness’s of the bearing will be connected
from the center of the rotor to the non-rotating structure in several parts.
To make it symmetric, they will connected in a "star" shape with an angle
ofπ
3rad between each. The equivalent stiffness is thus:
Ktotal = Ks ∗ (2 + 4(cos θ)2) (8.1)
Exactly at the same emplacement of the bearings are added some external
viscous damping, also in a "star-shape". The value of this damping will be
first arbitrary and then chosen according to the damping ratio wanted.
WARNING: As the rotor points into the x-direction, it is important to
put both damping and stiffness’s into the y and z direction (DOF 2 and 3 in
the .dat file), otherwise the results will be totally wrong.
80

Figure 8.4: Connection of the bearings to the non-rotating structure
8.1.2 Boundary conditions
The constraints is mainly divide into two parts: one will be put on the rotor
whereas the other will concern the non-rotating structure.
Rotating structure
The constraints are put in one or several nodes on the rotor central line. To
avoid local modes, the best thing is to constrain one of the nodes (the central
one) in the x-direction (axis of rotation). Fundamentally, constraining 1 or
3 nodes should not change the results significantly in this case.
Non-rotating structure
The constraints in this case will depend on the non-rotating structure:
• If there is no non-rotating structure, the end points of the stiffness will
be all constrained in all directions
81

• If there is a non-rotating structure (like a tube), 3 aligned nodes in
both ends of the tube will be constrained in all directions.
The second case will be simulated to check the displacement of the non-
rotating structure when the rotor is submitted to a mass unbalance.
8.2 Analysis of the modal complex eigenvalue
solution
As well as the Jeffcott rotor and the overhung rotor, the eigenvalue solution
will be performed to find the eigenvectors and eigenfrequencies. But with the
previous rotors, the mode shapes and Campbell diagram were known for these
particular rotors, so it was not to difficult to deselect the bad modes (local
modes or axial modes). But for this particular rotor, no studies have been
made before and no data is available for the real engine, thus the selection
of the modes has to be made more carefully.
As explained before, several simulations will be performed on several
models. Basically, the first one will be the rotor without blades and no
non-rotating structure, the second one will have the blades added on the
first model, and the third one will be a model with a simple non-rotating
structure.
8.2.1 Shaft without blades and no non-rotating struc-
ture
The first step is thus to solve the modal analysis and check if the modes are
realistic. Unrealistic modes will be unselected using the rotor card MODSEL
when performing the frequency response analysis.
When natural frequencies are analysed, the realistic modes can be found
by animating the modes (see figure 8.5). At the same time, the bad modes
82

Figure 8.5: Mode shapes of the rotor
can be checked as well. The figure 8.6 shows an unrealistic mode with a
translation in the x-direction (even if the central node was constrained in
that direction) and a "expansion" mode (the rotor becomes bigger in all
directions). It is typically the kind of modes that should be unselected when
performing the frequency response analysis.
Then the problem is to try to find which modes are right and which modes
are wrong. If this is not done properly, then the mass-unbalance simulation
83

Figure 8.6: Unrealistic modes of the rotor
will sometimes give wrong results, as it will be seen when performing it.
8.2.2 Shaft without blades and with the non-rotating
structure
In that case, the analysis is made with the outside structure. When perform-
ing Solution 110, the first two modes show what problems have to be solved
when adding the outside structure (see figure 8.7).
Indeed, the first mode seem to be similar to the first one observed on
figure 8.5, which is quite normal. But the second one is a mode of the outside
structure, so the modal complex eigenvalue solution will also be performed
for this mode, which will result in wrong results when plotting the Campbell
diagram (only straight lines should appear) or solving the mass unbalance
simulation.
To try to make a good analysis of this system and be able to see the first 3
or 4 modes (the most important ones), the external structure could be made
much stiffer to increase the natural frequency of the tube. Proceeding like
this, the good modes could be seen and the results should be more realistic.
So introducing this structure indicates that some new problems have to be
solved accurately to improve the model.
But it is important in any case to specify these few words coming from the
NX Nastran 6 guide :"NX Nastran (6) only supports the analysis of uncoupled
84

Figure 8.7: First two modes of the rotor with the structure
systems. In other words, when you model the rotor, any interaction between
the support structure and the rotor is not considered in the analysis. You can
use either fixed or spring stiffness boundary conditions to model the rotor’s
attachment to the support structure." [2]
These few lines have recently been skipped in the NX Nastran 7 version,
in which one can perform analyses with coupled rotors. So probably it is
possible to analyse the entire system using the new NX Nastran version, the
non-rotating structure has to be tested to check if this is right or not.
8.2.3 Shaft with blades and no non-rotating structure
As it is quite certain that the outer structure is not taken in account in the
analysis, the analysis of the blades is only done with the rotor and bearings.
When making the simulation, it can be seen that the problem will be
similar to the external structure problem. Indeed, the first 10 modes (and
probably more) shows that just the modes of the blades are found (around
250 Hz for all of them), which is below of the value of the first mode when
performing the analysis without blades.
85

Figure 8.8: Mode shape of the blades
Thus, because of these first modes, the mode shapes of the rotor will not
be seen neither. The ideas to solve this problem are quite the same as in the
previous section:
1. Change the material of the blades to get them stiffer (increasing the
natural frequency)
2. Start the extraction mode after a given value (such as 300 Hz) to sup-
press the modes of the blades in the analysis
But in both cases it is some tricks to try to get the good modes. The first
idea is not so perfect as it does not take into account the real properties of
the blades. The second idea could be bad if the frequency of the first mode
of the rotor is near the frequency of the blades (which is actually the case),
then the starting value has to be chosen carefully.
Once the problems of the structure and the blades are solved in a good
way, it should be easier to study the realistic model. Indeed, for the structure,
it will only be a problem of meshing. There is fundamentally no differences
at all to complete the mesh.
86

8.3 Frequency response analysis of the rotor
alone
The Campbell diagram of the rotor is just plotted for the model created in
section 8.2.1. Only the first 3 modes (so 6 curves considering the backward
and forward whirl) have been plotted considering the range of frequency
already large for a standard rotor.
Figure 8.9: Campbell diagram of the realistic rotor
WARNING: Only the right curves have been plotted on the diagram.
As the MODSEL has NOT been activated, that means 20 curves (!) should be
contained in this diagram, among them 14 unrealistic curves (i.e. 7 unrealistic
modes).
The frequency simulation is done to see what happen when you have a
more complicated rotor; no accurate results will be shown in this simulation
as the results in the previous section were not good enough.
87

The mass unbalance has been inserted at the edge of one of the disk.
As there is more than one disk and a significant distributed mass of the
shaft, it could produce a multiplicity of critical speeds, which may require
multi-plane balancing [4].
The rotor entries for "solution 111" have to be changed carefully, such as
the range of the study or the number of grid points for the rotor. Then the
backward and forward simulation can be performed as done in the previous
chapters.
Figure 8.10: Backward and forward displacement of the realistic rotor
On the figure 8.10, two maximum displacements can be seen for the back-
ward whirl and four for the forward. From the Campbell diagram (figure 8.9)
it is found that 3 backward and 2 forward modes are expected. The extra
peaks in the response analysis cannot be explained.
Thus it would be important to try to update the model and check the
results with some real experimental values. Indeed, it would be easier to
88

deselect the bad modes to perform a good mass unbalance analysis. For
now, it is impossible to say what is right or wrong with this model, more
studies have to be done concerning the mesh, or performing the frequency
response with a multi-plane balancing.
89

Chapter 9
Conclusion and discussion
The results of these 3 types of rotor, i.e. the Jeffcott, the overhung and the
more realistic model show both good and bad results. Indeed, the Jeffcott
one has proper results compared with the theory. Concerning the overhung
model, the Campbell diagram is quite correct but the effect of damping has
to be improved. For the whole engine, a more accurate study should be made
and compared with some experimental results.
As there is no 3D rotordynamics numerical analysis available in the lit-
erature, the tricky thing is to know what is the influence of each parameter
on the model, such as the stiffness, damping, shell thickness and plenty of
others. As the modelling is in 3D, some errors of discretization can occur,
and the modelling of the constraints is more difficult since a lot of points
have to be constrained.
The other aim of this project was to have some better post-processing
capabilities. As the solution 110 is not supported by NX 7, it seemed first
to be complicated. At least it was possible to visualize the 3D mode shapes
and the Campbell diagram in NX, but it is still impossible to visualize the
rotor rotation with this software. The possibilities of post-processing have
to be developed to facilitate an effective evaluation of the results.
In order to check what parts of the project that could be improved, the
"Further work and improvement" section will partially give these answers.
90

Further work and improvements
Further improvements can be made in several ways. One of the most impor-
tant improvements is that Nastran 6 has evolved in Nastran 7 recently, that
means some new capabilities are available on this new version.
Meshing improvements
The mesh improvements include the different 1D, 2D and 3D mesh. For
example:
• The 3D mesh should be created more symmetric (the discretization can
lead to a non-symmetrci rotor)
• 1D springs and dampers should be added to model the bearings in a
better way
It could be a good idea to try to use some other dampers or springs,
or non-linear elements when meshing the rotor (for instance frequency de-
pending bearings). For example, a damper can be modelled in 5 different
ways (from CELAS1 to CELAS5, see the NX online manual for detailed
definition). The difference between each one would be interesting to check.
Insertion of the rotor dynamic entries
As told before, the solution 110 is not supported. As a result, the rotor
dynamic entries have to be added by hand when proceeding the "Write, Edit
and Solve" box, which is quite long to write. A good thing would be to create
a macro which allows NX to insert directly the rotor entries in the program
without typing it manually.
91

New capabilities within Nastran 7
Several capabilities have been developed in the new version of Nastran. Now
it is possible to:
• perform a Transient Response Analysis (SOL 112) in order to study
the behaviour of the rotor when passing a critical speed (see Appendix
E for an example)
• perform rotor dynamics analyses on structures with one or more spin-
ning rotors (at different speeds) and include several cards for the bear-
ings
One main improvement is that it is no longer noted that the support
structure is not taken into consideration compared with the documentation
of Nastran 6. So it could be possible to perform a transient analysis due to
mass unbalance and see the effect of this simulation on the entire structure,
which is one way of solving the blade-off problem.
With these new capabilities, it could be interesting to perform the tran-
sient response analysis on the model created in this project, and try to de-
velop a more complete model. Then, one have to wait for specific 3D rotor
dynamics codes to be developed in order to solve three dimensional rotor
problems without false nodes and visualization problems.
92

Bibliography
[1] Rachid Rahouadj. Dynamique des structures 2. Cours de L’Ecole Na-
tionale Superieure d’Electricité et de Mécanique, 2003.
[2] NX Nastran 7. Rotor Dynamics User’s Guide. Siemens, 2009.
[3] Arvid Andersson and Henrik Wennerstrand. A finite element program for
rotordynamical applications. Master’s thesis, Lulea Tekniska Universitet,
2003.
[4] John M. Vance. Rotordynamics of Turbomachinery. Wiley Interscience,
1988.
[5] Wen Jeng Chen and Edgar J. Gunter. Introduction to Dynamics of Rotor-
Bearing Systems. Eigen Technologies, 2001.
[6] Y.C. Fung and Pin Tong. Classical and Computational Solid Mechanics.
World Scientific, 2001.
[7] Rolf Gustavsson. Rotor Dynamical Modelling and Analysis of Hydropower
Units. PhD thesis, Lulea Tekniska Universitet, November 2008.
[8] Giancarlo Genta. Dynamics of Rotating Systems. Springer New York,
2005.
[9] Michel Lalanne and Guy Ferraris. Rotordynamics Prediction in Engineer-
ing. Wiley, 1998.
93

Appendices
A-Software Capable of Solving the Rotordynam-
ics
There are many software packages that are capable of solving the rotordy-
namic system of equations. These codes make it easy to add bearing co-
efficients, side loads, and many other items needed in rotordynamics. The
non-rotordynamic specific codes are full featured FEA solvers, and have many
years of development in the solving techniques. These non-rotordynamic spe-
cific codes can also be used to calibrate a code designed for rotordynamics.
Rotordynamic Specific Code
• MADYN 2000: Commercial combined finite element (3D Timoshenko
beam) lateral, torsional, axial and coupled solver for multiple rotors
and gears, various bearings (fluid film, spring damper, magnetic)
• Dyrobes: Commercial 1D beam element solver
• XLRotor: Commercial 1D beam element solver
• iSTRDYN: Commercial 2D Axis-symmetric finite element solver
• ARMD: Commercial 1D beam element solver
• XLTRC2 : Academic 1D element solver
• ComboRotor: Combined finite element lateral, torsional, axial solver
for multiple rotors evaluating critical speeds, stability and unbalance
response
94

• Dynamics R4: Commercial software developed for design and analysis
of spatial systems
• MESWIR: academic computer code package for analysis of rotor-bearing
systems within the linear and non-linear range
Non-Rotordynamic Specific Codes
• Ansys: Version 11 workbench capable of solving the rotordynamic equa-
tion (3D-2D and beam element)
• Nastran : Finite element based (3D-2D and beam element)
• SAMCEF: Finite element based (3D-2D and beam element)
95

B-Example of bulk data entries in the .dat file
FILE MANAGEMENT
ASSIGN OUTPUT4=’jeffcott_perfect.gpf’,UNIT=22, FORM=FORMATTED
ASSIGN OUTPUT4=’jeffcott_perfect.csv’,UNIT=25, FORM=FORMATTED
EXECUTIVE CONTROL
ID,NASTRAN,truerotor_sim1-solution_1
SOL 110
TIME 999
CEND
CASE CONTROL
ECHO = NONE
RMETHOD = 99
SPC = 100
METHOD = 1
CMETHOD = 2
OUTPUT
DISPLACEMENT(PLOT,REAL) = ALL
BULK DATA
BEGIN BULK
PARAM ROTGPF 22
PARAM ROTCSV 25
PARAM K6ROT 100.0
PARAM POST -2
PARAM POSTEXT YES
PARAM,AUTOSPC,YES
PARAM,PRGPST,NO
PARAM,GRDPNT,0
ROTORG 11 1 THRU 10001
SID RSTART RSTEP NUMSTEP REFSYS CMOUT RUNIT FUNIT
ROTORD 99 0.0 10. 200 FIX -1.0 RPM HZ +ROT0
ZSTEIN ORBEPS ROTPRT
+ROT0 YES 1.0E-5 3 +ROT1
RID1 RSET1 RSPEED1 RCORD1 W3-1 W4-1 RFORCE1
+ROT1 1 11 1.0 1 0. 0.
EIGRL 1 10. 200. 5 2
EIGC 2 CLAN 4
CORD2R 1 0. 0. 0. 0. 0. 1. +XCRD001
96

C-Information complement for damping
Damping is a mathematical approximation used to represent the energy dis-
sipation observed in structures. Damping is difficult to model accurately
since it is caused by many mechanisms, including viscous effects, external
friction, internal friction and structural non-linearities. Because these effects
are difficult to quantify, damping values are often computed based on the
results of a dynamic test.
Viscous and Structural Damping
Two types of damping are generally used for linear-elastic materials: viscous
and structural. The viscous damping force is proportional to velocity, and
the structural damping force is proportional to displacement. Which type to
use depends on the physics of the energy dissipation mechanisms.
The viscous damping force fv is proportional to velocity and is given by:
fv = cu, where c is the viscous damping coefficient and u the velocity.
The structural damping force fs is proportional to displacement and is
given by: fs = iGku, where G is the structural damping coefficient, k the
stiffness, u the displacement and i the complex number (i2 = −1)
For a sinusoidal displacement response of constant amplitude, the struc-
tural damping force is constant and the viscous damping force is propor-
tional to the forcing frequency. The following figure shows it as well as the
two damping forces are equal at a single frequency for constant amplitude
sinusoidal motion.
At this frequency, Gk = cω∗ or c =Gk
ω∗
where ω∗ is the frequency at
which the structural and viscous damping forces are equal for a constant
amplitude of sinusoidal motion
If the frequency ω∗ is the natural frequency ωn, the previous equation
becomes c =Gk
ωn
= Gωnm. If the critical damping is inserted as ccr =
2√
km = 2mωn, the damping ratio is thus:
97

Structural Damping and Viscous Damping Forces for Constant Amplitude Sinu-
soidal Displacement
ξ =c
ccr
=G
2
The quality or dynamic magnification factor is defined by Q =1
2ξ=
1
G,
which is inversely proportional to the energy dissipated per cycle of vibration.
The Effect of Damping
Damping is the result of many complicated mechanisms. The effect of damp-
ing on computed response depends on the type and loading duration of the
dynamic analysis. For short duration loadings, damping can be ignored as
the structure reaches its peak response before significant energy has had time
to dissipate. Damping is important for long duration loadings, and is criti-
cal for loadings (such as rotating machinery) that continually add energy to
the structure. The proper specification of the damping coefficients can be
obtained from structural tests or from published literature if possible.
98

D-Conversion of the csv file with the CampbellCsv-
ToAfu journal (Virtual Basic)
’ NX 6.0.2
’ CampbellCsvToAfu.vb - Import Campbell .csv file to .afu file
’
’
’
’------------------------------------------------------------
Option Strict Off
Imports System
Imports System.IO
Imports System.Collections
Imports System.Windows.Forms
Imports NXOpen
Imports NXOpenUI
Module Module1
Dim theSession As Session = Session.GetSession()
Dim lw As ListingWindow = theSession.ListingWindow
Sub Main()
lw.Open()
’ Get .csv file to process
Dim openFileDialog As New OpenFileDialog
openFileDialog.Filter = "csv files (*.csv)|*.csv|All Files (*.*)|*.*"
openFileDialog.FilterIndex = 1
openFileDialog.Title = "Select NX Nastran Rotordynamics .csv Output File"
openFileDialog.InitialDirectory = theSession.Parts.BaseDisplay.FullPath
openFileDialog.CheckFileExists = True
If openFileDialog.ShowDialog = DialogResult.OK Then
Dim csvFile As String = openFileDialog.FileName
’ Generate afu filename
Dim afuFile As String = Left(csvFile, InStrRev(csvFile, ".")) + "afu"
’ Check to see if file exists. If it does, prompt to delete it
If (File.Exists(afuFile)) Then
Dim title As String = "File Exists"
Dim message As String = "AFU File " + afuFile + " already exists." + vbNewLine +
Dim result As MsgBoxResult = MsgBox(message, MsgBoxStyle.OkCancel, title)
If (result = MsgBoxResult.Ok) Then
99

theSession.AfuManager.DeleteAfuFile(afuFile)
Else
Return
End If
End If
’ Create the afu file
theSession.AfuManager.CreateNewAfuFile(afuFile)
lw.WriteLine("Creating AFU File: " + afuFile)
parseData(csvFile, afuFile)
End If
End Sub
Sub parseData(ByVal csvFile As String, ByVal afuFile As String)
Dim csvData() As String = System.IO.File.ReadAllLines(csvFile)
Dim csvIdx As Integer = 0
Dim values() As String
’ Find start of RPM data
Do
values = Split(csvData(csvIdx), ",")
csvIdx += 1
Loop Until values(0) = " 10001"
’ Get RPM Data
Dim rpmList As New ArrayList()
Do
values = Split(csvData(csvIdx), ",")
csvIdx += 1
rpmList.Add(Trim(values(0)))
Loop Until (Left(values(0), 6) = " ")
csvIdx -= 1
rpmList.RemoveAt(rpmList.Count - 1)
Dim rpmCount As Integer = rpmList.Count
Dim rpmData(rpmCount - 1) As Double
For rpmIdx As Integer = 0 To rpmCount - 1
rpmData(rpmIdx) = rpmList.Item(rpmIdx) * 1.0
Next
lw.WriteLine(vbNewLine + "Data stored for " + rpmCount.ToString + " RPM values" + vbNewLine
createPerRevLine(afuFile, rpmData, 1.0)
createPerRevLine(afuFile, rpmData, 2.0)
100

lw.WriteLine(vbNewLine)
’ Loop through the rest of the data
Dim data(rpmCount - 1)() As String
Do
Dim labels() As String = Split(csvData(csvIdx), ",")
csvIdx += 1
Dim Idx As Integer = 0
For i As Integer = csvIdx To csvIdx + rpmCount - 1
Dim temp() As String = Split(csvData(i), ",")
data(Idx) = Split(csvData(i), ",")
Idx += 1
Next
Dim yValues(rpmCount) As Double
For j As Integer = 0 To labels.Length - 2
For i As Integer = 0 To rpmCount - 1
yValues(i) = data(i)(j)
Next
lw.WriteLine("Creating record " + Trim(labels(j)))
createAfuRecord(afuFile, Trim(labels(j)), rpmData, yValues)
Next
csvIdx += rpmCount
Loop Until csvIdx >= csvData.Length
End Sub
Sub createPerRevLine(ByVal afuFile As String, ByVal rpm() As Double, ByVal scale As Double)
Dim ordData(rpm.Length - 1) As Double
’ Generate 1P and 2P lines
For rpmIdx As Integer = 0 To rpm.Length - 1
’ordData(rpmIdx) = rpm(rpmIdx) * (Math.PI / 30) * scale
ordData(rpmIdx) = rpm(rpmIdx) / 60 * scale
Next
’ Create 1P and 2P records in AFU
Dim recordName As String = scale.ToString + "P"
createAfuRecord(afuFile, recordName, rpm, ordData)
lw.WriteLine(recordName + " line generated")
End Sub
Sub createAfuRecord(ByVal afuFile As String, ByVal recordName As String, ByVal abscissaData()
Dim afuData1 As CAE.AfuData
101

afuData1 = theSession.AfuManager.CreateAfuData()
afuData1.FileName = afuFile
afuData1.RecordName = recordName
afuData1.SetIdInformation("x+", 1, "x+", 1)
afuData1.SetAxisDefinition(CAE.AfuData.AbscissaType.Uneven, CAE.XyFunctionUnit.RpmRpm, CAE.AfuData.OrdinateType.Real,
afuData1.SetRealData(abscissaData, ordinateData)
Dim createTime1 As String
createTime1 = theSession.AfuManager.CreateRecord(CAE.XyFunctionMacroType.General, CAE.XyFunctionGeneralType.CampbellDiagram,
afuData1.Dispose()
End Sub
Public Function GetUnloadOption(ByVal dummy As String) As Integer
’Unloads the image immediately after execution within NX
GetUnloadOption = NXOpen.Session.LibraryUnloadOption.Immediately
’----Other unload options-------
’Unloads the image when the NX session terminates
’GetUnloadOption = NXOpen.Session.LibraryUnloadOption.AtTermination
’Unloads the image explicitly, via an unload dialog
’GetUnloadOption = NXOpen.Session.LibraryUnloadOption.Explicitly
’-------------------------------
End Function
End Module
102

E-Modelling of the whole engine
103

F- Help for the transient response analysis
Equations of Motion
The equations of motion are shown for the modal method. The following
equation is solved in the fixed reference system:
[M ] ¨u(t) + (Ω[C] + [DI + DA]) ˙u(t) + ([K] + Ω[DB]) ¯u(t) = ¯p(t)
The generalised force is similar to the case of frequency response: ¯p(t) =
[Φ]T p(t). The physical displacement method is found from u(t) = [Φ] ¯u(t).
The standard NX Nastran methods are used for the recovery of element forces
and stresses.
The equations are solved numerically with the standard numerical meth-
ods. The initial conditions are equal to zero: ¯u(0) = 0 and ˙u(0) = 0.
The forcing function must be defined by the user with the NX Nastran
cards. For the transient analysis, the user must provide an excitation function
which is compatible with the time step (TSTEP) used and with the rotor
speed values on the ROTORD card. A time function with linearly varying
frequency must be defined for the synchronous and asynchronous analysis.
Example of simulation
The forcing frequency is defined by:
p = p0 sin(ωt)t (9.1)
For a linearly varying frequency one have ω(t) = 2πat. The slope of
the curve is a. The angle is thus ϕ(t) = ω(t)t = 2πat2. The instantaneous
frequency is the time derivative of the angle: ω =dϕ
dt= 4πat. In order to
obtain a frequency F at time T, one have F = ωend/(2π) = 2aT The slope is
then given by a = F/(2T ). For example, to simulate from 0 to 500 Hz in 10
seconds the constant is a = 500/(2 ∗ 10) = 25. At the end of the simulation,
the frequency is F = 2.25.10 = 500 Hz and the period Tend = 1/500 = 0.002.
104

The time step is now dependent of the wanted number of integration
points per cycle. A reasonable value is 10 points and hence, a time step of
0.0002 can be used. This means 50000 time steps for the simulation of 10
seconds.
Similar to the frequency domain when a rotating force was defined by
real and imaginary parts in x and y direction, a rotating force can be defined
in the time domain by taking sine and cosine functions for the x and y axis.
These data must be entered into NX Nastran cards by means of TABLED1
cards.
The following graph shows the result of the simulation applied on the
Jeffcott rotor.
It is recommended to start the simulation with the frequency response
analysis as the way to perform the transient simulation is close to it.
105