12. Non-Equilibrium Phase Transitions - NCKU
50
12. Non-Equilibrium Phase Transitions 12.A. Introduction 12.B. Non-Equilibrium Stability Criteria 12.C. The Schlogl Model 12.D. The Brusselator 12.E. The Rayleigh- Benard Instability S12.A. Fluctuations Near A Non-Equilibrium Phase Transition
Transcript of 12. Non-Equilibrium Phase Transitions - NCKU

12. Non-Equilibrium Phase Transitions
12.A. Introduction
12.B. Non-Equilibrium Stability Criteria
12.C. The Schlogl Model
12.D. The Brusselator
12.E. The Rayleigh- Benard Instability
S12.A. Fluctuations Near A Non-Equilibrium Phase Transition

12.A. Introduction
This chapter deals with phase transitions in systems that are far from absolute
thermodynamic equilibrium. To keep the problem manageable, we shall consider
only chemical and hydrodynamic systems that can be described in terms of
thermodynamic densities that are sufficiently well-behaved functions of space and
time. Physically, this means the systems are in local equilibrium and the time scales
of interest are large compared to any local relaxation times.
If a system is moved far enough away from absolute equilibrium, nonlinear effects
become dominant. Now, nonlinear equations can admit multiple solutions that have
different regions of stability. This means, by changing the parameters of a nonlinear
system, we can induce transitions between phases represented by the stable solutions.
In the linear regime near absolute equilibrium, the stable state is a steady state
characterized by minimum entropy production if one of the thermodynamic forces is
held fixed. This state is said to be on the thermodynamic branch.
Nonequilibrium phase transitions occur when the thermodynamic branch becomes
unstable. If space-time symmetries are broken during the transition, the new state
may exhibit oscillatory pattern in space and/or time. These patterns are called
dissipative structures since energy, and sometimes matter, must be supplied to
maintain them.
Simple models of nonequilibrium phase transitions to be discussed are
1. Chemical systems
(a) Schlogl model with 1st order-like phase transition.
(b) Brusselator model with dissipative structures.
2. Hydrodynamic systems
(a) Rayleigh-Benard instability.

12.B. Non-Equilibrium Stability Criteria
12.B.0. Entropy Production
12.B.1. Stability Conditions Near Equilibrium
12.B.2. Stability Conditions Far From Equilibrium

12.B.0. Entropy Production
A nonequilibrium system is dissipative since, to satisfy the 2nd law, there must be
some mechanisms that increase its entropy more than that offerred by the spontaneous
decay to absolute equilibrium. Thus, stability conditions are related to the rate of
entropy production.
To begin, consider a closed, isolated, hydrodynamic system of constant V. The total
time rate of change of entropy of the system is given by integrating over V the entropy
balance equation
Ds s
ss
t
v J (10.24)
to get
V
dS sdV
dt t
Ds s
V V
dV s dV v J
Ds s
A V
d s dV A v J (12.1)
s
V
dV (12.2)
where A is the surface bounding V and the surface integral in (12.1) vanishes because
the system is closed and isolated. The 2nd law becomes
0s
V
dSdV
dt (12.3)
which can be satisfied if the local entropy production s is nonnegative.
According to (10.179), we can write
0s i ii
J (12.4)
where iJ is a local flux and i the corresponding local force.

12.B.1. Stability Conditions Near Equilibrium
Near equilibrium in the linear regime, we can write
i ij jj
J L (12.5)
where ij jiL L (Onsager's relation). Putting (12.5) into (12.4) gives
0s ij i ji j
L (12.6)
which means the symmetric matrix ijLL is non-negative. Furthermore, for
spontaneous processes, it is positive definite. The necessary condition for minimum
entropy production is
0 sij ik j jk i
i jk
L
kj j ik i
j i
L L
ki ik ii
L L (12.12)
2 ki ii
L 2 kJ
Thus, if there is no constraint on the system, all i are independent and we have
0iJ for all i
which is just the absolute equilibrium state. On the other hand, if k of the forces, say,
, 1i i k are held fixed, the necessary conditions for minimum entropy
production in a system subject to n forces are
0iJ for 1, ,i k n (12.13)
When the minimum entropy production state is reached, the system becomes
stationary so that the k fluxes , 1, ,iJ i k will become constant. Such a state is
called a kth order stationary state. Near this steady state, we can write
0
0 01 1
1
, , , ,n
ss k n s k n i
i k i
02
1 1
1
2
n ns
i ji k j k i j
where the subscript 0 denotes steady state values. Using (12.12), we have

0 01 1
1 1
1, , , ,
2
n n
s k n s k n ij i ji k j k
L
(12.14)
The quantity
, 1
10
2
n
ij i ji j k
P dV L
(12.15)
is called the excess entropy production. It is positive definite since L is. Since
the steady state is the minimum entropy production state, we have
, 1
nj
ij ii j k
dd PdV L
dt dt
1
nj
jj k
ddV J
dt
1
n
ij i jj k
dV g J J
0 (12.16)
where we've used [see section 10.D],
1 χ L M α gα
andd
dt
α
J
Thus, P is a Liapounov function [see Appendix C].
Note that (12.15,16) are stability criteria for steady states in the linear regime. They
need not be satisfied by steady states in the nonlinear regime.

12.B.2. Stability Conditions Far From Equilibrium
12.B.2.1. General Arguments
12.B.2.2. Stability of Nonlinear Chemical Reactions
12.B.2.3. Exercise 12.1

12.B.2.1. General Arguments
1. Stability Relations
2. Example: Chemical System

12.B.2.1.1. Stability Relation
Using (12.4), the total entropy production can always be written as
i ii
P dV J (12.17)
Taking the time derivative gives
i ii i
i
P JdV J
t t t
(12.18)
JP P
t t
(12.18a)
where
ii
i
PdV J
t t
(12.18b)
J ii
i
P JdV
t t
(12.18c)
In the linear regime where i ij jj
J L with ij jiL L , we have
jii ij i
i ij
JL
t t
iji j
ij
Lt
ii
i
Jt
so that (12.18) implies
10
2i
ii
P PdV J
t t t
(12.19)
where the inequality is obtained from (12.16).
In the nonlinear regime, we still have (proof shown later)
0ii
i
PdV J
t t
(12.20)
but there is no general constraint on J P
t
. Stability analysis of the system therefore
requires, besides (12.20), one more relation.

12.B.2.1.2. Example: Chemical System
Consider a chemically reacting system of N types of molecules held far from
equilibrium by its large affinity. We shall assume both pressure and temperature to
be uniform throughout the system so that all effects of diffusion, viscosity, and
thermal conduction can be neglected. The entropy production thus simplifies to
1
1 rcP dV J A
T
(12.22)
[see (10.179)], where r is the number of reactions. Therefore
1
1 rcP A
dV Jt T t
(12.23)
From (10.179), we can write the balance equation for the jth kind of molecules as
1
rj c
j
cJ
t
(12.24)
Using the definition of the affinity
1
N
j jj
A
we have
1
Nj
jj
A
t t
1 1 1
r N rjc c
jj
AJ J
t t
1
Nj j
j
c
t t
so that (12.23) becomes
1
1 Nj j
j
P cdV
t T t t
(12.25)
Since the pressure and temperature are held constant, the chemical potentials j can
only be functions of the concentrations ic . Therefore
1k
Nj j i
i i PT c i
c
t c t
(12.26)
and (12.25) becomes
1 1
1
k
N Nj ji
j i i PT c i
P ccdV
t T c t t
(12.27a)
Now, as shown in section 2.H.2 and in particular eq(2.179), the matrix k
j
i PT c ic

is positive semi-definite so that (12.27a) implies
0P
t
(12.27)
Thus, condition (12.20) is indeed valid for the present case.

12.B.2.2. Stability of Nonlinear Chemical Reactions
Consider the reaction
1
21 1 2 2 3 3 4 4
k
kA A A A (12.28)
with
1 2 3 431 1 2 2 3 4
Nk N N k N N
t
3 41 2
1 2
2 3 41 1 2
1 1 2
1k N N
k N Nk N N
(12.29)
Now,
i ic
t t
i J ii
NM
t
where i i iM and iN is the molar density, iM the molecular weight, and
i i iM N is the mass density.
For a system of ideal gases,
3 4
1 2
3 4
1 2
, lnN N
A RT F T PN N
3 4
1 2
3 4
1 2
ln ,N N
RT K T PN N
(12.30)
where , exp ,K T P F T P and 4
1
, lni
ii i
i
F T P P
is independent of
iN . At equilibrium,
0A and 0iN
t
3 4
1 2
3 4
1 2
, 1N N
K T PN N
and3 4
1 2
2 3 4
1 1 2
1 0k N N
k N N
which means
2
1
,k
K T Pk
Hence,

3 33
3
NJ J
t M
3 4
1 2
1 2
3 41 1 2
1 2
1 ,N N
k N N K T PN N
1 2
1 1 2 1 expB
Ak N N
k T
(12.31)
thus relating the reaction rate J to the affinity A. For small A, we have
1 211 2
3 B
k AJ N N
k T
Now, for constant T and P, we have
, 1
1
2k j
ni
i ji j j PTN
S N NT N
, 1
1
2k j
ni
i ji j j PTn
n nT n
Using
ii
i
Vn
M
i
i
cV
M [ iM is the molar weight ]
we have
, 1
1
2k j
ni
i ji j j iPTc
Sc c
V T c M
Stability of Steady State of Purely Chemical Reactions
Near equilibrium, we have
0 21
2local local local localS S S S (12.32)
with0
2
, 1
1 10
2 2k j
ni
local i ji j j iPTc
S c cV T c M
(12.33)
where the inequality results from the fact that the matrix
0
k j
i
j PTcc
is non-negative.

Now,
1
1 rki
i kk
cJ
t
1
1 rki
i kk
cJ
t
Also,
1k j
ni
i jj j PTc
cc
Hence, using
1
nk
k j jj
A
we have
1
nk
k j jj
A
, 1
k i
njk
j ii j i PTc
cc
Consider now,0
2
, 1
1 1
2 2k j
nji i
local j ii j j iPTc
ccS c c
V t T c t t M
Since,
j i
ii TPn
G
n
1
j ii TPc
G
n c
we have
21
k j k j i
i
j j iTPc TPc
G
c n c c
21
k i k j i
j
i i jTPc TPc
G
c n c c
k ik j
ji
j i TPcTPcc c
Therefore,0
2
, 1
1 1
2k j
ni i
local ji j j iPTc
cS c
V t T c t M

0
, 1 1
1
k j
n rki
j i ki j kj PTc
c JT c
1
1 r
k kk
A JT
so that
2 21 1
2 2total localS dV St t V
1
1 r
k kk
dV A JT
Now,
2 210total localS dV S
V
Therefore, if 2 0totalSt
, the steady state is stable [see Lyapounov function].
Consider the entropy production
1
1 r
k kk
P dV A JT
1
1 r
k kk
P dV J AT
where | means fixed J. In the steady state, 0kJ corresponding to the forces kA
that are not held fixed vanish [see Minimum Entropy Production]. Therefore,
21
2k k kJ J J
so that
1
1 r
k kk
P dV J AT
21
2 totalSt
which means for stable states,
0P
Example
Consider the unimolecular reaction
1
2
k
kX A
with 1A X and

1 2X
X A
dNk N k N
dt AdN
dt
In the steady state,
0XdN
dt
so that
0 2
1X A
kN N
k
i i
i
M NJ
t
1 i
i
N
t
1 X
X
N
t
1 A
A
N
t
1 2X Ak N k N
,i i
i X A
A
2
1
ln A
X
k NRT
k N
In the steady state, 0X XN N so that 0A . Hence, the steady state is also the
equilibrium state. Now, let AN be held fixed away from the equilibrium value so
that
1 XJ k N
X
X
NA RT
N
1
P A JT
2
1 0X
X
Nk R
N
Therefore, the steady state is stable.

12.B.2.3. Exercise 12.1
Consider the auto-catalytic reaction
1
2
2k
kA X X
with
21 2
XA X X
dNk N N k N J
dt
where the sign of the 1k ( 2k ) term is + (–) since there is one more (less) X after the
() reaction. Also, the net stoichiometric coefficient for X is 1X . Thus,
22
1
ln X
A X
k NA RT
k N N
2
1
ln X
A
k NRT
k N
For the steady state,
0XdN
dt
0
0 1
2
0X
X A
N
kN N
k
The case 0 1
2X A
kN N
k also implies 0A so that it is an equilibrium state.
Now, let AN be held fixed away from the equilibrium value so that
01 22A X XJ k N k N N
0X
X
NA RT
N
201 20
2A X XX
RP k N k N N
N
For 0 0XN , we have P
so that the state is unstable.
For 0 1
2X A
kN N
k , we have 2
2 0XP Rk N
so that the state is stable.

12.C. The Schlogl Model
Consider the reactions
1
2
2 3k
kA X X
3
4
k
kX B (12.34)
with rates
2 31 2 3 4
XA X X X B
dNk N N k N k N k N
dt (12.46)
2 31 2
AA X X
dNk N N k N
dt
3 4B
X B
dNk N k N
dt
X A BdN dN dN
dt dt dt
currents
2 31 1 2
1 AA X X
A
dNJ k N N k N
dt
2 3 4
1 BX B
B
dNJ k N k N
dt
and affinities
32
1 21
ln X
A X
k NA RT
k N N
2
1
ln X
A
k NRT
k N
42
3
ln B
X
k NA RT
k N
At equilibrium, we have 1 2 0A A so that using overbars to indicate equilibrium
values, we have
2 1X Ak N k N and 4 3B Xk N k N (12.44)
Let
2 4
1 3
A
B
N k kR
N k k (12.45)
At a steady state with

0XdN
dt 0A BdN dN
dt dt
we have
0 2 0 3 01 2 3 4 0A X X X Bk N N k N k N k N
0 3 0 2 01 3 4
2 2 2
0AX X X B
k N k kN N N N
k k k
0 3 0 2 0 0X X XN aN kN b (12.47)
where
1
2
Ak Na
k 4
2B
kb N
k 3
2
kk
k
For fixed a and k, b is a cubic function of 0XN , i.e.,
0 3 0 2 0X X Xb N aN kN
The extrema of b are given by
0 2 00
3 2 0X XX
dbN aN k
dN (12.48)
with solutions
213
3XN a a k (12.49)
so that
3 2
X X X Xb b N N a N kN
Now,
20
0 2
0
6 2 0
0X
X
d bN a
dN
for 0
3X
aN
Also,
b as 0XN
0b as 0 0XN
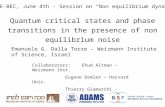
Thus, assuming 2 3a k so that XN are real, the graph of 0Xb b N is

Therefore, there are 3 phases as indicated by the intersects of the line B with the curve.
Of these, the one with 0X X XN N N is unstable.
For 2 3a k , there is no extrema so that there is only an inflection point at 0
3X
aN
b
b –
b +
N--X N +
XN0
X
Stable,
steady
phase
Unstable
Stable,
steady
phase
B

Thus, the phase diagram in the b a plane is
b
N0Xa /3
b–(a) curve
b+(a) curve
Hysteresis Region
a
b–
3k
N0X N+
X
N0X < N–
X
Single
Phase
2 stable, 1 unstable phases
b+

12.D. The Brusselator
12.D.1. The Brusselator – A NonLinear Chemical Model
12.D.2. Boundary Conditions
12.D.3. Linear Stability Analysis

12.D.1. The Brusselator – A NonLinear Chemical Model
Belousov- Zhabotinski reaction
Ce ion catalyzed oxidation of Molonic acid by Bromate in Sulfuric acid medium:
1. Well-stirred:
Periodic changes of Br , 4 3/Ce Ce concentrations (spatially
homogeneous) color changes (chemical clock)
2. Unstirred, shallow dish:
Travelling waves of Br , 4 3/Ce Ce concentrations.
See R.J.Field, R.M.Noyes, J.Chem.Phys. 60, 1877 (74).
3 Variable Intermediates Model (Oregonator)
See R.J.Field, J.Chem.Phys. 63, 2289 (75).
Simplified Model (Brusselator)
See I.Prigogine, Lefever, J.Chem.Phys. 48, 1695 (68).
The Brusselator consists of 4 reactions involving 6-components:
1k
A X
2k
B X Y D
3
2 3k
X Y X
4k
X E (12.50)
Adding these reactions gives
4 4A B X Y X Y D E or A B D E (net reaction)
Thus, X and Y are catalysis. Futhermore, the k3 reaction shows that X is autocatalytic
(it appears on both sides of the reaction) and provides the non-linearity.
In a typical run, A, B are kept in excess while D, E are removed instantly so that
concentrations of A, B, D and E are fixed. Thus, the affinity A is large and the
system is far from chemical equilibrium. X, Y then exhibit variations in time / space.
Rate Equations
The rate equations are

2 21 2 3 4'
XX X A B X X Y X
ND N k N k N N k N N k N
t
(12.51)
2 22 3'
YY Y B X X Y
ND N k N N k N N
t
(12.52)
where XD and YD are diffusion co-efficients. Note that the 2k and 3k
reactions contribute equal amounts but with opposite signs to'XN
t
and'YN
t
.
In order to simplify the notations, we would like to absorb the k's into the N's and
write (1) as
2 2X
XD X A BX X Y X
t
(12.53)
2 2Y
YD Y BX X Y
t
(12.54)
To this end, we set
X XX N 'tt t etc
so that 7 's for X, Y, A, B, t, DX, and DY. Eq(12.53-4) then become
2 2 2
' X
X XD X X X A A B X B X X Y X Y X X
t
ND N N N N N N N
t
2 2 2
' Y
Y YD Y Y Y B X B X X Y X Y
t
ND N N N N N
t
Rearranging, we have
2 2
' X
X A tD t X X A B t B X X Y t X Y t X
X
ND N N N N N N N
t
2 2 2
' Y
Y B X tD t Y Y B X X t X Y
Y
ND N N N N N
t
Comparing with (12.51-2) gives
1XD t 1
YD t
1A t
X
k
2B X t
Y
k
2B t k 23X t k
3X Y t k 4t k
Thus, there are 8 equations for 7 variables. However, the 4 equations involving k2
and k3 are not independent. They reduce to 2 equations by setting X Y . Thus,
we have

4t k
4
1 1XD
t k
4
1 1YD
t k
2 2
4B
t
k k
k
2 3 3
4X
t
k k
k
3
4X Y
k
k
21 3 1 3 1
34 4 4
XA
t
k k k k k
k k k
i.e.,
4 't k t
4
XX
DD
k
4
YY
DD
k
2
4B
kB N
k
23 1
34
A
k kA N
k
3
4X
kX N
k 3
4Y
kY N
k
Steady Uniform State
For a steady state
0X Y
t t
For a uniform state2 2 0X Y
Hence, for a steady, uniform state, eq(2) becomes
21 0A B X X Y
2 0BX X Y The 2nd equation gives
0X orB
XY
Now, the 0X solution can be discarded since it means nothing happens.
For theB
XY
solution, the 1st equation becomes

210
B B BA
Y Y
00
0
BY
A and 0 0X A (12.55)
where we've used the subscript 0 to indicate the steady, uniform state. In terms of
the usual parameters, we have
0 0X A 2
0 03 3 13
4 4X A
k k kN N
k k 0 01
4X A
kN N
k
00
0
BY
A
3 003 2 4
2 04 4 3 1
BY
A
k k k NN
k k k k N
00 2 4
03 1
BY
A
k k NN
k k N
Reverse Reactions
Now, if the reverse reactions are allowed with reaction constants ik , we have
2 21 2 3 4'
XX X A B X X Y X
ND N k N k N N k N N k N
t
31 2 3 4X Y D X Ek N k N N k N k N
and similarly for YN , AN , …, etc. In chemical equilibrium, the ki and ki' reactions
cancel pairwise, e.g., 4 4X Ek N k N , …, etc. Hence, the 0XN and 0
YN solutions
are also solutions of the chemical equilibrium (with appropriate 0EN and 0
DN ). In
other words, the steady, uniform states are on the thermodynamics branch.
Stability
To study the stability of the steady, uniform state, we set
0X X X A (12.56)
0
BY Y Y
A (12.57)
Eq(2) then becomes
22X
BD A B A A A
t A
22Y
BD B A A
t A
Keeping only terms linear in and , we have

2 22XD A B BA B A AB At
2 21XD B A
2 22YD B BA B A ABt
2 2YD B A
Rearranging, we have
2 21XD B At
(12.58)
2 2YD A B
t
(12.59)
Note that these equations govern the kinetics of the system near 0 , the
steady, homogeneous, state. Since these equations are linear,
1. Different components of the Fourier transform of and don't mix.
2. Study of 1 component ,k is enough.

12.D.2. Boundary Conditions
Particular solutions require the specification of boundary conditions. We'll assume
the system to be contained in a box of sides L and set
, ,
ˆii
i x y z
n
L
k e
Case I: Dirichlet Boundary Conditions
0X X and 0Y Y on boundary.
0 on boundary.
, , sin sin sin tx y zt k x k y k z e r k (12.60)
, , sin sin sin tx y zt k x k y k z e r k (12.61)
Case II: Neumann Boundary Conditions
ˆ Xn ˆ 0Y n on boundary. ( ˆ surfacen )
ˆ n ˆ 0 n on boundary.
, , cos cos cos tx y zt k x k y k z e r k (12.62)
, , cos cos cos tx y zt k x k y k z e r k (12.63)
In both cases, we have2 2k
t
and similarly for . Here,
2 2 2 2x y zk k k k
22 2 2x y zn n n
L
2
mL
where m is an integer. Note that
0m 0x y zn n n
Hence, 0m is not allowed for case I since it would imply 0 identically.
However, 0m is not allowed for case II.
Since the time dependence of and are te , we have
1. real

(a) 0 0 for t large, i.e., the system return to the spatially homogeneous
steady state.
(b) 0
grows as t grows. The linearized equations will become invalid so that
the state is unstable. It bifurcates to another state, thus inducing a phase
transition. The new state obeys a set of non-linear equations and hence
cannot be discussed using our linearized analysis. However, the condition
0 does indicate the on-set of the bifurcation. Finally, the new state is
expected to exhibit spatial oscillations.
2. complexLet R Ii . Time oscillation is then denoted by I .
(a) 0R .
The system gradually returns to the steady state.
(b) 0R .
Bifurcate to new state, possibly oscillatory in both time and space.
( chemical clock, travelling waves, etc.)
Fourier Components
In terms of and , we have
2 21 xB D k A
2 2yB A D k
or
2 2
2 2
10x
y
B D k A
B A D k
(12.64)
i.e.,
21
2
0c A
B c
where
21 1 xc B D k and 2 2
2 yc A D k
2 21 2 1 2 0c c c c A B (12.65)

with solutions
2 21 2 1 2 1 2
14
2c c c c c c A B
2 21 2 1 2
14
2c c c c A B
(12.67)

12.D.3. Linear Stability Analysis
12.D.3.0. General Discussion
12.D.3.1. Real Frequency Dispersion
12.D.3.2. Complex Frequency Dispersion

12.D.3.0. General Discussion

12.D.3.1. Real Frequency Dispersion
2 21 2 4c c A B (12.68)
Now, consider the case 2 1c c so that 0 and 0 iff
2 2 21 2 1 2 4c c c c A B
or 21 2 0c c A B (12.69)
2 2 2 21 0x yB D k A D k A B
2 2 2 2 2 2 4 2 0y y x x yBA A BD k D k A D k D D k A B
22 2
21 x
xy y
D AB A D k
D D k
2 2 22
2 21 x
xy y
D A L mA D
D D m L
mB (12.70)
where 2 2 2x y zm n n n . Writing
mB mm
2mdB
dm m
0Set
extremum at
0m
2 2 2
2 2y x
A L L
D D
2
2x y
AL
D D
Since B for 0 orm , 0m is a minimum.
Consider the case of a 1-dim system. We have 2m n so that
0 0n mx y
A L
D D is not an integer.
Note that only n integer are solutions to the kinetic equation. Thus, for CB B
(the 2n line), bifurcation occurs.

B
BC
0 1 2 3 4n0
Bm
Unstable

12.D.3.2. Complex Frequency Dispersion
2 21 2 4c c A B (12.71)
Since everything is positive, we can write
1 2 2c c A B
or
2 21 2y xB A D D k A B
221 0y xB A D D k
22 1y xB A D D k
Since
20B A
we have
2 1y xD D k or2
2y x
LD D
m (12.72)
The real part of is 1 2
1
2c c . Therefore, 0 if 1 2c c , i.e.,
2 2 21 x yB D k A D k
or 2 21 x yB A D D k
2
22
1 x y
mA D D
L
mB (12.73)
Note that for case II of the Neumenn B.C., 0n is allowable, which gives rise to a
homogeneous time clock. Else, we have travelling waves.

Unstable
n1 2 3
BBm

12.E. The Rayleigh- Benard Instability
12.E.1. Hydrodynamic Equations And Boundary Conditions
12.E.2. Linear Stability Analysis

12.E.1. Hydrodynamic Equations And Boundary Conditions
Fluid flow in pipe:
1. low velocity, high viscosity smooth, steady.
2. high velocity, low viscosity turbulence.
Benard's problem: (sometimes called Rayleigh-Benard problem)
For small 0 dT T T , fluid is at rest.
For large enough T, Bernard's instability set in and convective flow cells appear.
Td
T0
Glass
plates
Fluid with viscosity and thermal conductivity
Gravity
Td < T0
Side View
Hexagonal
cells
Covered
container
Top View

Consider the Navier-Stokes equations
0t
v (conservation of mass) (12.75)
2 1
3P
t
v
vv F v v
(conservation of momentum) (12.76)
:u
u K Tt
v
Π v(conservation of energy) (12.77)
For a thin fluid layer occupying the entire x–y plane,
0
0 0P
T TT
0 0 0P T T (12.78)
where the thermal expansivity
1P
P
V
V T
1
PT
is evaluated at 0 . Rearranging, we have
0 01 P T T z
Open
container
Rings

Steady State, No Flow ( v 0 )
The Navier-Stokes equations become
0 P F ˆP g z (12.80)2 0K T (12.81)
where ˆg F z and g is the gravitational acceleration. Since the only variations
are in the z–direction, we have
dPg
dz 0 01 P T T g
2
20
d T
dz
Using x to denote the steady state value of x, the 2nd equation gives
T z c c z ( c, c' are constants )
With the boundary conditions
00T T and dT d T
we have
00
dT TT z T z
d
(12.82)
Hence,
00 1 d
P
dP T Tz g
dz d
with solution
2000
2d
P
T TP z P z z g
d
Setting 0 dT Ta
d
, we have,
0T z T a z
20 0
1
2 PP z P z a z g
(12.84)
where 0 0P P . Note that
0 01 P T T and 0 1 Pa z (12.83)
Stability
Let the deviation of X from its steady state value be

, ,X t X t X z r r
Since 0v , we have , ,t t v r v r . For small v, the energy u is mostly
thermal so that we can write
vu c T and vu c T
Keeping only terms linear in X, the Navier-Stokes equations become
0t
v (12.85)
2 1ˆ3
P gt
v
z v v (12.86)
0u u u K Tt
v (12.87)
where the term :Π v does not contribute since Π is proportional to partials of v.
Note that the steady state satisfies
0u K Tt
0t
ˆ 0P g z
2 0T Now, (12.87) can be written as
2 0u
u u u K Tt t
v v
which, with the help of (12.85), gives
2 0u
u K Tt
v
2 0v
Tc T K T
t
v
2 0v z
Tc av K T
t
Next, we can rewrite (12.85) as
0t
v v
Since 0 1 Pa z z , we have

z
dz d dv
t dt dz dz
v
Thus,
0t
v where
Since 0 01 P T T where T T T , we have
0 P
T
t t
Hence,
0 P T
t
v
Now, 3 410 ~ 10 1P while
T
t
is expected to be small for small T.
Therefore,
0 v ( Boussineq approximation )
and
0 1 Pa z 0
The linearized N-S eqs thus reduce to
0 v (12.89)
20 ˆP g
t
v
z v (12.90)
2
0
0zv
T Kav T
t c
(12.91)
with
0 P T (12.88)
Now, 12.90 gives
20 ˆg
t
ω
z
ω
where ω v is the vorticity. Setting the kinematic viscosity as0
and
using (12.88), we have
2ˆPg Tt
ω
z
ω(12.92)
Since ˆf z is in the x–y plane, we have

2zzt
(9)
Using
vω
2 v v 2 v
where the last equality is due to 0 v . Similarly,
ˆT z ˆT z 2 ˆT z
2ˆTT
z
z
Thus, 12.92 gives
2 2 4ˆP
Tg T
t z
vz v
so that
2 2 2 22 4
2 2 2 2z
P z
v Tg T v
t z x y z
2 22 4
2 2z
P z
vg T v
t x y
(12.94)
Thus, the z–components of and v are given by eqs(9) and (12.94), respectively.
The situation of interest is the transition from the steady state to the Benard instability
state (see figure). The actual patterns of vz in the x–y plane are determined by the
boundary conditions.
Boundary Conditions
Since the upper and lower plates are held at fixed temperatures 0T and dT , we have
, ,0; , , ; 0T x y t T x y d t for all t
Also, the fluid is bounded between the plates so that
, ,0; , , ; 0z zv x y t v x y d t for all t
These 2 conditions are general boundary conditions valid for all types of surfaces.
In addition, there will be further constraints dependent on the properties of the plates.
I. Rigid Surfaces (No Tangential Flow)
, ,0; , , ; 0x y t x y d t v v for all t

Thus, on the boundaries,
0v
0x y
v v
0yxz
vv
y x
0zv
z
[since 0 v everywhere]
II. Smooth Surfaces (e.g. Free Surfaces)
This means flows in the x–y plane do not exert force in the z direction. Hence,
// 0z boundary where // denotes components in the x–y plane.
Thus,
, ,0; , ,0;xz yzx y t x y t , , ; , , ; 0xz yzx y d t x y d t
Since v is proportional to , we have
0yx z zvv v v
z x z y
on boundaries
Since 0zv for all x and y on boundaries, we have
0yx z zvv v v
z x z y
for all x and y on boundaries
Thus,
22yz x
vv
z z y z x
0yx
vv
y z x z
on boundaries
Also,
0yx zvv v
x y z
v
implies2
20yz x
vv v
z x z y z
2
2zv
z
on boundaries

12.E.2. Linear Stability Analysis
In summary, the linear stability equations are
2
0
0zv
T Kav T
t c
(6)
2zzt
(9)
2 22 4
2 2z P zv g T vt x y
(10)
Looking for solutions periodic in the x–y plane, we write
// //, , , expX t X z i t r k k r
where
// ˆxkk x ˆyk y and // x yk x k y k r
Hence,
XX
t
and2
2 2//2
X k Xz
After cancelling the common exponential factor, the stability equations become
22//2
0
0zv
KT av k T
c z
(12.102)
22//2z zk
z
(12)
22 22 2 2// // //2 2z P zk v g k T k v
z z
(12.103)
Boundary Conditions
General
0B
T 0 0T T d
0z Bv 0 0z zv v d for all // ,k

Rigid Surface
0z B 0 0z z d
0z
B
v
z
0
0z z
z z d
v v
z z
for all // ,k
Smooth Surface
0z
Bz
0
0z z
z z dz z
2
20z
B
v
z
2 2
2 2
0
0z z
z z d
v v
z z
for all // ,k
Solutions
(11) gives
22//2
0
1z
v
Kv k T
a c z
Substituting into (13)
2 22 2 2// // //2 2
0z Pk k v g k Tz z
gives
2 2 22 2 2 2// // // //2 2 2
0
10P
v
Kk k k T g k T
a z z c z
2 2 22 2 2 20// // // //2 2 2
0
0vP
v
K ck k k T g k T
a c z z z K
2 2 2 22 2 2 0 0 //// // //2 2 2
v v Pc a c g kk k k T T
z z z K K
Introducing the dimensionless variablez
Zd
, we have
2 2
2 2 2
1
z d Z
and
2 22
2 2 2
1A Ad
z d Z

Now, set
2 2 2//k d 2d s
20 0v vc cd s s
K K
where 0 vc
K
26 4 2 20 // 0v P v Pa c g k a c g
d d RK K
where 40 v Pa c gR d
K
is the Rayleigh number. Thus,
2 2 22 2 2 2
2 2 2s s T R T
Z Z Z
Doing the same to zv gives in the same equation for zv . Since the B.C. are more
specific on zv , we shall work on it henceforth. Following the standard technique,
we set
22
2 zG vZ
2 2 22 2 2
2 2 2 zF s G s vZ Z Z
so that we have
22 2
2 zs F R vZ
1
0
dZ F both sides gives
1 122 2
20 0
zdZ F s F R dZ F vZ
Consider
1 2
20
I dZ F FZ
1 1
0 0
F F FF dZ
Z Z Z
Now, F is a sum ofn
zn
v
Z
with 0,2,4,n . Hence,F
Z
s a sum ofn
zn
v
Z
with
1,3,5,n . Note that

For a rigid surface, 0n
zn
v
Z
for all n.
For a smooth surface, 0n
zn
v
Z
for even n.
Therefore,
1
0
0F
FZ
for both cases.
Hence,
21
0
FI dZ
Z
and
21 1
22 2
0 0
z
FdZ s F R dZ F v
Z
Since
22
2 zG vZ
22
2F s G
Z
Thus,
1
0
zJ dZ F v 1 2
22
0
zdZ v s GZ
1 2
22
0
zz
vdZ G s v G
Z
[integration by parts twice]
1
2
0
zdZ G s v G [2
22z
z
vG v
Z
]
1 22 2
20
z zdZ G s v vZ

21 22 22
20
zz
vdZ G s v
Z
[integration by parts once]
Hence,
221 1 2
2 2 22 2 22
0 0
zz
F vdZ s F R dZ G s v
Z Z
Since only s is complex, the imaginary part gives
21 1 2
2 22 22
0 0
Im Im zz
vdZ s F R dZ s v
Z
or
21 2
2 22 22
0
Im 0zz
vs dZ F R v
Z
Since , 0R , the integrand is always positive unless 0zv . Thus, other than the
steady state, we must have Im 0s , i.e., s is real and likewise2
s
d
. Hence,
0s system is unstable.
0s system is stable.
so that 0s is the transition point. Setting 0s , we have
322 2
2 z zv R vZ
[eigen-equation]
Note that //k and R a T . Now, the imposition of boundary conditions
will in general restrict the eigenvalues 2R to discrete values. Thus, k// and T are
related. Note that the reciprocal of k// is proportional to the cell size.
As we increase R from 0, the system will become unstable as 2R reaches the 1st
eigenvalue.
If both plates are smooth boundaries,2
20
mz
m
v
Z
at 0,1Z for all m.
sinzv A n Z 1,2,n
2
2
2z
z
vn v
Z
so that the eigen-equation becomes

32 2 2n R
i.e.,
32 2
2
nR
The smallest R is therefore
32 2
2R
This may be further reduced by adjusting so that2
0dR
d . Thus,
2 32 2 2 2
2 2 4
3dR
d
22 2
2 2 24
3
22 2
2 24
2 0
which gives only one real solution as2
2
2
2.222
C
and
22 2C
C
dd
32 2
2
C
CC
R
32
42
3272 657.514
2
Ref:
1. E.N.Lorenz, J.Atmos.Sci. 20,130 (63). [Chaos]
2. S.Chandrasekar, "Hydrodynamics and Hydromagnetic Stability" (61)
3. E.Ott, "Chaos in Dynamical System" (93)