
10.1117/2.1201305.004886 Detectingco-ordinatedactivities … · 2018-12-12 ·...
4
10.1117/2.1201305.004886 Detecting co-ordinated activities from persistent surveillance Georgiy Levchuk Algorithms identifying the behavior patterns of people and vehicles in wide-area motion imagery can extract intelligence from data that is too large to process manually. Unmanned aerial vehicles have become an indispensable tool for the US military. Airborne platforms using wide-area motion im- agery (WAMI) sensors can capture square miles of video data for hours or days at a time (see Figure 1). However, there are simply not enough analysts to manually detect the activities of interest within these tremendous data volumes: activities such as an ambush preparation or materials transportation. To realize the true potential of persistent surveillance for intelligence, we need automated tools that can scour terabytes of data to detect the co-ordinated activities of multiple entities. The goal of our research is to create and validate algorithms that can infer the patterns of such activities and statistically search through large, multi-intelligence data to detect behaviors of interest. 1 For surveillance purposes, we consider everyday life to be comprised of activities that form patterns. Most are benign and planned, like driving to work or attending a school function. However, the patterns of malicious intent, such as emplacing improvised explosive devices or insurgent reconnaissance, are often hidden to analysts, obscured in a vast canvas of irrelevant behaviors and ambiguous data. In our research, we present an enhanced model of multi-entity activity recognition for detect- ing these patterns in wide-area motion imagery. 1 Most existing methods for image- and video-based activity recognition rely on rich visual features and motion patterns to classify entities and their actions, for example distinguishing an individual who is running, or identifying a vehicle as a pick-up truck. WAMI data, which can cover up to tens of square miles, can contain hundreds or thousands of individuals and vehicles. But given the low-resolution gray-scale format, people and cars ap- pear ant-like at 5-7 pixels each (see Figure 2). Zoom in on an entity and one loses the big picture. Zoom out and you have a Figure 1. Depiction of wide-area persistent surveillance. EO: electro- optical (sensor). FOV: field of view. (Photo courtesy of the Defense Advanced Research Projects Agency). panorama of people and vehicles whose intersecting tracks are nearly impossible to analyze manually. Currently, methods of detecting correlated activities of more than two entities involve an exhaustive evaluation in line with the number of tracks involved. They are therefore not scalable to wide-area persistent surveillance where thousands of tracks are collected. Our model addresses these multi-entity challenges by oper- ating on persons and vehicles as tracks. It converts them into motion and interaction events, and represents activities in the form of role networks or patterns, where the spatial, tempo- ral, contextual, and semantic characteristics of the co-ordinated activities are encoded. Our model analyzes WAMI data and detects these activities by breaking down the problem into multiple layers of informa- tion, which enables the algorithms to process data at various Continued on next page
Transcript of 10.1117/2.1201305.004886 Detectingco-ordinatedactivities … · 2018-12-12 ·...

10.1117/2.1201305.004886
Detecting co-ordinated activitiesfrom persistent surveillanceGeorgiy Levchuk
Algorithms identifying the behavior patterns of people and vehicles inwide-area motion imagery can extract intelligence from data that is toolarge to process manually.
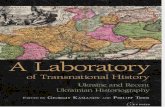
Unmanned aerial vehicles have become an indispensable tool forthe US military. Airborne platforms using wide-area motion im-agery (WAMI) sensors can capture square miles of video datafor hours or days at a time (see Figure 1). However, there aresimply not enough analysts to manually detect the activities ofinterest within these tremendous data volumes: activities suchas an ambush preparation or materials transportation. To realizethe true potential of persistent surveillance for intelligence, weneed automated tools that can scour terabytes of data to detectthe co-ordinated activities of multiple entities. The goal of ourresearch is to create and validate algorithms that can infer thepatterns of such activities and statistically search through large,multi-intelligence data to detect behaviors of interest.1
For surveillance purposes, we consider everyday life to becomprised of activities that form patterns. Most are benign andplanned, like driving to work or attending a school function.However, the patterns of malicious intent, such as emplacingimprovised explosive devices or insurgent reconnaissance, areoften hidden to analysts, obscured in a vast canvas of irrelevantbehaviors and ambiguous data. In our research, we present anenhanced model of multi-entity activity recognition for detect-ing these patterns in wide-area motion imagery.1
Most existing methods for image- and video-based activityrecognition rely on rich visual features and motion patterns toclassify entities and their actions, for example distinguishing anindividual who is running, or identifying a vehicle as a pick-uptruck.
WAMI data, which can cover up to tens of square miles, cancontain hundreds or thousands of individuals and vehicles. Butgiven the low-resolution gray-scale format, people and cars ap-pear ant-like at 5-7 pixels each (see Figure 2). Zoom in on anentity and one loses the big picture. Zoom out and you have a
Figure 1. Depiction of wide-area persistent surveillance. EO: electro-optical (sensor). FOV: field of view. (Photo courtesy of the DefenseAdvanced Research Projects Agency).
panorama of people and vehicles whose intersecting tracks arenearly impossible to analyze manually.
Currently, methods of detecting correlated activities of morethan two entities involve an exhaustive evaluation in line withthe number of tracks involved. They are therefore not scalable towide-area persistent surveillance where thousands of tracks arecollected.
Our model addresses these multi-entity challenges by oper-ating on persons and vehicles as tracks. It converts them intomotion and interaction events, and represents activities in theform of role networks or patterns, where the spatial, tempo-ral, contextual, and semantic characteristics of the co-ordinatedactivities are encoded.
Our model analyzes WAMI data and detects these activitiesby breaking down the problem into multiple layers of informa-tion, which enables the algorithms to process data at various
Continued on next page

10.1117/2.1201305.004886 Page 2/4
Figure 2. Wide-area motion imagery (WAMI) over Ohio State University, with a stadium highlighted on the left, and a zoom on the right showingvehicles in a section of a parking lot. The image is from Columbus large image format (CLIF) data. (Photo courtesy of the Air Force ResearchLaboratory).
levels (see Figure 3). The first layer preprocesses raw imageryby tracking moving objects in WAMI. Layer 2 extracts primitiveinformation about objects (people or cars, for example) and theirmovements, representing a collection of points of the objects inthe field of view with pixel or world location, velocity, and time.
The third layer is comprised of ‘events,’ defined as single,low-level actions of a single entity, and interactions among twoentities, spanning seconds to minutes. Examples of such eventsinclude car-stop, person-move, person-exit, etc.
The fourth layer, ‘activities,’ is composed of multiple events,or interacting entities that occur during longer time periodsof minutes to hours. Examples of activities include person-meeting, car-unloading, drop-off, vehicle-following, and car-formation-movement.
We model these multi-entity activities as directed graphs,which we call model networks. Nodes represent the actors’ roles
(or states of the roles) in the activity, and we match these totracks. Similarly, the links between nodes correspond to theinteractions and dependencies among the tracks.
Many real-world activities contain several states and roles, re-sulting in networks of tens of nodes. However, the collected datais much larger, with numbers of tracks usually above 104 for afull-frame 60-minute imagery data set. Activity detection andclassification algorithms must then find subsets of data nodes(tracks and events) with the ‘best partial match’ to activity pat-terns represented by the model networks.
To demonstrate multi-actor activity recognition, we usedColumbus large image format (CLIF) data—a real-world videodata set collected by the Air Force Research Laboratory over thecampus of Ohio State University. As a result, we had a ground
Continued on next page

10.1117/2.1201305.004886 Page 3/4
Figure 3. Process flow from WAMI raw imagery, through track collection, activity inferences, and network pattern representation.
truth (information collected on the ground) for object functions,but not the activities; and had to manually annotate the latter.The activities of moving objects were easily recognizable, andtherefore we were able to generate the accurate ground truthneeded for algorithm testing.
Figure 4 shows how a normal behavior like a pick-up activitycould be indicative of suspicious events in the area of interest,such as hostile groups picking up their reconnaissance or othertactical personnel. Two other examples include bus-stop, whichmay be interpreted as multi-person movement or clandestine lo-gistics; and valet, which is of interest if the analysts are trying todetect driver-switching.
Using our model for detecting multi-entity activities, ourexperiments indicate high detection accuracy under low-to-medium missing-event conditions (on average 80% detection of
relevant tracks with 20% false tracks for 20% and 30% missingevents). Our activity detection models can adapt to varying com-plexity levels in activities and types of actors and events. Weachieve the detection by exploiting the semantics of interactionsbetween people and vehicle tracks, providing rich context of themotion behavior that could be captured in WAMI data.
In application, the algorithm can learn activity patterns fromhistorical data, and can detect activities in information withhigh ambiguity and a high ratio of irrelevant tracks and events.Additionally, analysts can define new patterns to query.
Currently, most work in WAMI-based exploitation is on im-provements in target-tracking and change-detection, while com-plex interactions and semantically meaningful activity analysis
Continued on next page

10.1117/2.1201305.004886 Page 4/4
Figure 4. Activity types and their network representations in CLIF data.
are overlooked. One of the greatest challenges to further researchis the absence of relevant data sets that could be shared amongresearchers and used for algorithm development.
Author Information
Georgiy LevchukAptima Inc.Woburn, MA
Georgiy Levchuk specializes in mathematical modeling, algo-rithm development, and software prototype implementation. Hegained his PhD in electrical engineering from the University ofConnecticut, and his BS/MSM in mathematics from the NationalTaras Shevchenko University of Kiev, Ukraine.
References
1. M. Jacobsen, C. Furjanic, and A. Bobick, Learning and detecting coordinated multi-entity activities from persistent surveillance, Proc. SPIE 8745, p. 87451L, 2013. doi:10.1117/12.2014875
c 2013 SPIE














![Instituto de Sistemas e Rob´otica - INESC-ID · be considered. The approach in [Levchuk et al., 2002a, Levchuk et al., 2002b] differs from the proposed approach as it seeks an optimal](https://static.fdocuments.in/doc/165x107/5e786f7ee16f91286d01e56f/instituto-de-sistemas-e-robotica-inesc-id-be-considered-the-approach-in-levchuk.jpg)

