10/10/2014 Jason Holm ME 486 Encoders and Sensors.
24
10/10/2014 Jason Holm ME 486 Encoders and Sensors
-
Upload
marian-hodge -
Category
Documents
-
view
215 -
download
0
Transcript of 10/10/2014 Jason Holm ME 486 Encoders and Sensors.

10/10/2014Jason Holm
ME 486
Encoders and Sensors

Outline
Overview
Arduino Thermostat
In Class Problem
Encoder Selection
Video

DefinitionSensor – a device that converts
physical stimulus or variable of interest into a more convenient form
for the purpose of measuring the stimulus.
Encoder – a device used to represent the current position of
arms and joints
Physical Stimulus
Sensors/Encoders
Output Signals

Stimulus Types
Stimulus
Mechanical – Position, velocity, acceleration, rotation, torque, pressure, …
Electrical – Voltage, current, charge, resistance, conductivity
Thermal – heat, heat flow, specific heat, Thermal conductivity
Radiation– types of radiation (gamma, ..) intensity, wavelength
Magnetic – Magnetic field, flux, conductivity,Permeability
Chemical – ConcentrationpH levels, toxicity, pollutantsComponent identities
Table 6.1, pg. 123

Encoder Types
1. Absolute- Give information about the position of the shaft- Do not need to be “homed” when turned on
2. Relative- Provides information about motion of the shaft, which is further processed
into speed, distance, position, etc. - May need to be “homed” in order to work properly
EXAMPLES

Output SignalsOutput Types
Discrete Sensor - Produces that can only have certain values
Digital Sensor- Produces digital output signal in form of parallel status bits or series of pulses
Binary Sensor - Produces ON/OFF signal only
Analog Sensor - Produces a continuous analog signal such as voltage
Pg. 123

Industry Trends
Exploded iPhone
Microsensor technologies• Physical dimensions in microns • Fabrication techniques similar to integrated circuit production
More common• Low cost• More applications • Easier interface

Industry trends - Arduino Thermostat
Sensor type – Temperature sensor
Programming – Voltage into tempLogic based programming

List of Sensors
Pg. 124-125
Table 6.2, Page 124-125

Desirable Features
Pg. 126
Table 6.3
• High accuracy – low systemic errors
• High precision – Noise is low
• Wide operating range
• High speed response
• Ease of calibration
• Minimum drift – little loss of calibration over time
• High reliability – doesn’t breakdown, withstand diverse environments
• Low cost
• Ease of integration – programming language, signal type

Sensor and Encoder Considerations
• Application – Mechanical, Thermal, Electrical, …• Size – Dimension vs available space• Cost • Resolution – how accurate• Output signal – voltage, gray code• Measurement rate • Range of sensing • Support • Life Cycle

Example Problem
• A robot arm consists of a rotating shaft and an arm, welded to that shaft. There is a tool placed at the end of the arm (see Figure 1). An absolute rotary encoder, which measures angular position, is attached to the rotating shaft. If the minimum tool movement that you wish to detect is 1 mm, what bit encoder would you need? Rod length is 9 cm. Shaft diameter is 2 cm.
Encoder
Robot ArmRotating
Shaft
Tool
1 cm
9 cm
Figure 1

Solution
Approximate as triangle
Required resolution: θ = 0.5729°
Remember:n = number of bits2n - Number of partitions -> 22 = 4 partitions 360/ 2n = angle of partition -> 360/ 22 = 90 °
Solving for n:360/ 2n = 0.57297
n = 9.295 bitsRound up to 10 bits
Double check: 360 / 210 = 0.351 ° < 0.5729°
.1 m.001 m
θ

Solution
Other Considerations:
Measurement rate? -> How fast will shaft be spinning?
Operating environment? -> Acid resistant, water proof…
Measurement Range? -> 0 ° – 360 °?
Durability? -> How long will this last?
Size? -> Will this fit onto robot?

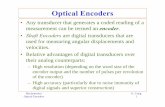
Optical Rotary Encoders

Absolute Encoders

TRD-NA1024

Number of bits

Other Considerations

Summary Sheet

Price Comparison
Light Duty TRD-MX1024-BD Medium Duty TRD-N1024-RZWD
$994 mm shaft/ 25.4 mm diameter body1024 Pulses per revolutionAxial Load – 20N, Radial Load – 30NIP50 – Dust ProofMax speed: 5000 rpmAgency approval: CE, RoHS
$27110 mm shaft/78 mm diameter body1000 Pulses per revolutionAxial Load – 50N, Radial Load – 100NIP65 –Splash ProofMax speed: 5000 rpmAgency approval: CE, RoHS
$1358 mm shaft/ 50 mm diameter body1024 Pulses per revolutionAxial Load – 30N, Radial Load – 50NIP50 – Dust ProofMax speed: 5000 rpmAgency approval: CE, RoHS
Heavy Duty TRD-GK1000-RZD Absolute Encoders TRD-NA1024-NWD
$2718 mm shaft/50 mm diameter body1024 Pulses per revolutionAxial Load – 30N, Radial Load – 50NIP65 – Splash ProofContinuous max: 3000rpm, Instant max: 5000rpmAgency approval: CE, RoHS

Major Vendors
SENSORS
• Automation Direct - Various
• MTS Temposonics –Absolute non-contact linear position sensors
ENCODERS
• Anaheim Automation – Rotary, Linear Encoder
• Renishaw – Rotary, Linear Encoders

Video Examples

Eitel, Elisabeth. "Basics of Rotary Encoders: Overview and New Technologies." Machine Design Magazine 7 May 2014: n. pag. Web. 30 June 2014.
"Optical Encoders." Code For Free. N.p., n.d. Web. 09 Oct. 2014.
"TRD-N1024-RZWDENCODER 1024 PPR 8mm SOLID PUSH- PULL 5-30VDC 2m (6.5ft) CBL MED DUTY." TRD-N1024-RZWD. N.p., n.d. Web. 09 Oct. 2014.
"Insight - How Computer Ball Mouse Works." Insight. N.p., n.d. Web. 09 Oct. 2014.
"Industrial and Light Industrial Sensors." MTS Sensors. N.p., n.d. Web. 09 Oct. 2014.
References