1 Ordinary Differential Equations Jyun-Ming Chen.
67
1 Ordinary Differential Equations Jyun-Ming Chen
-
Upload
pauline-wilkins -
Category
Documents
-
view
236 -
download
0
Transcript of 1 Ordinary Differential Equations Jyun-Ming Chen.

1
Ordinary Differential Equations
Jyun-Ming Chen
2
Contents
• Review• Euler’s method• 2nd order methods
– Midpoint
– Heun’s
• Runge-Kutta Method
• Systems of ODE• Stability Issue• Implicit Methods• Adaptive Stepsize

3
Review
• DE (Differential Equation)– An equation specifying the relations among the
rate change (derivatives) of variables
• ODE (Ordinary DE) vs. PDE (Partial DE)– The number of independent variables involved
)( 2
2
txxdt
xd ),( 1 yxf
y
f
x
f
4
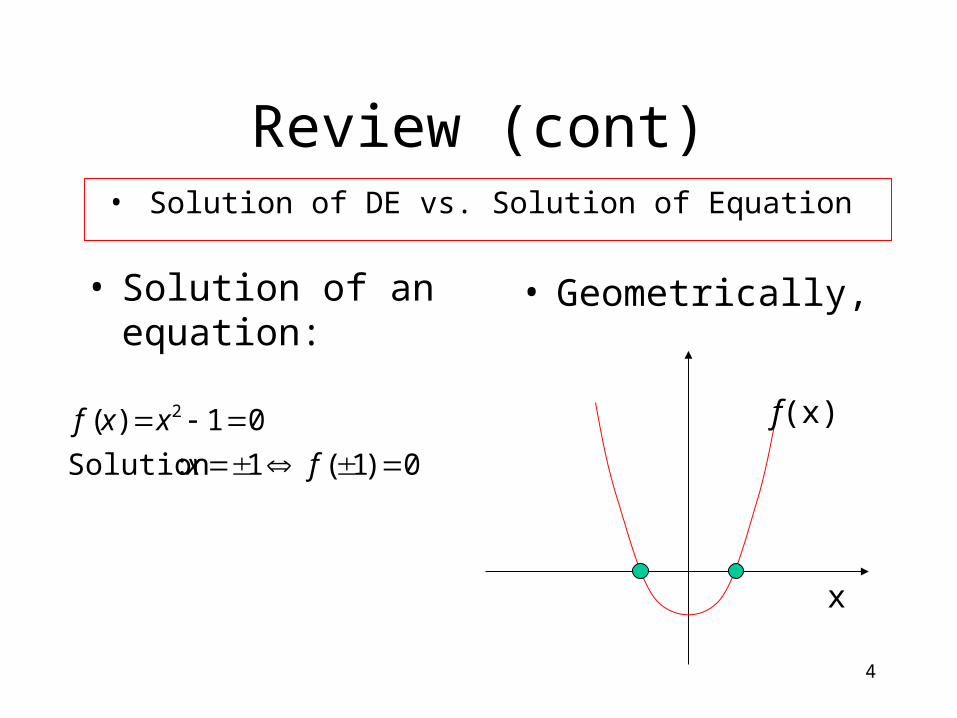
Review (cont)
• Solution of an equation:
• Solution of DE vs. Solution of Equation
0)1(1 :Solution
01)( 2
fx
xxf
• Geometrically,
f(x)
x
5
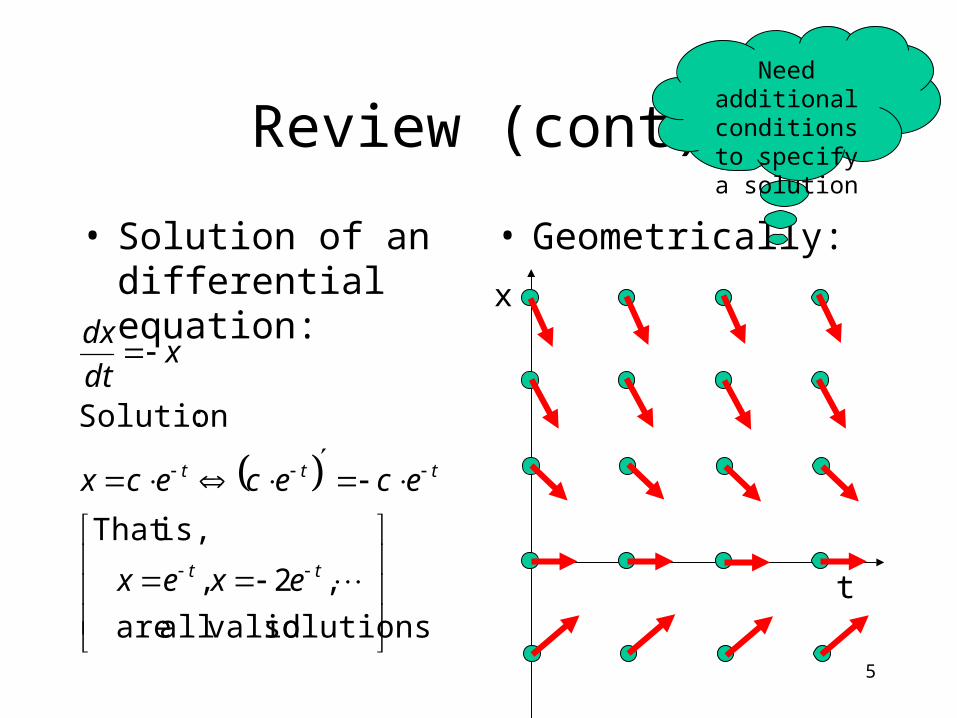
Review (cont)
• Solution of an differential equation:
• Geometrically:
solutions validall are
,2,
is,That
:Solution
tt
ttt
exex
ecececx
xdt
dx
t
x
Need additional conditions to
specify a solution

6
Review (cont)
• Order of an ODE– The highest derivative in the equation
• nth order ODE requires n conditions to specify the solution– IVP (initial value problem): All conditions
specified at the same (initial) point– BVP (boundary value problem): otherwise
7
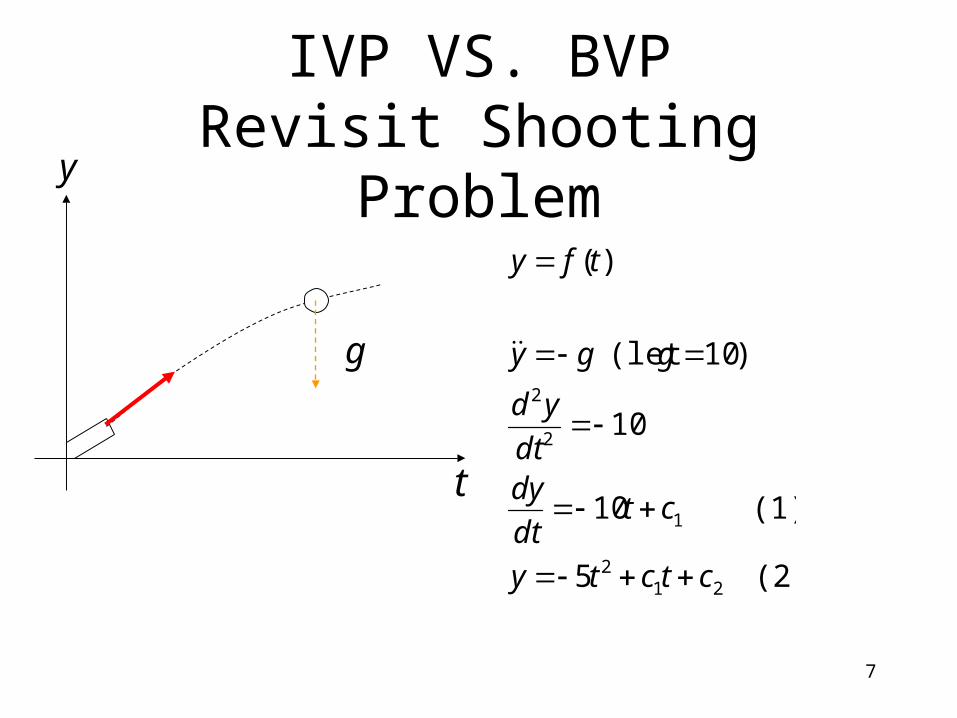
IVP VS. BVPRevisit Shooting Problem
t
g
y
(2) 5
(1) 10
10
)10(let
)(
212
1
2
2
ctcty
ctdt
dydt
yd
ggy
tfy
8
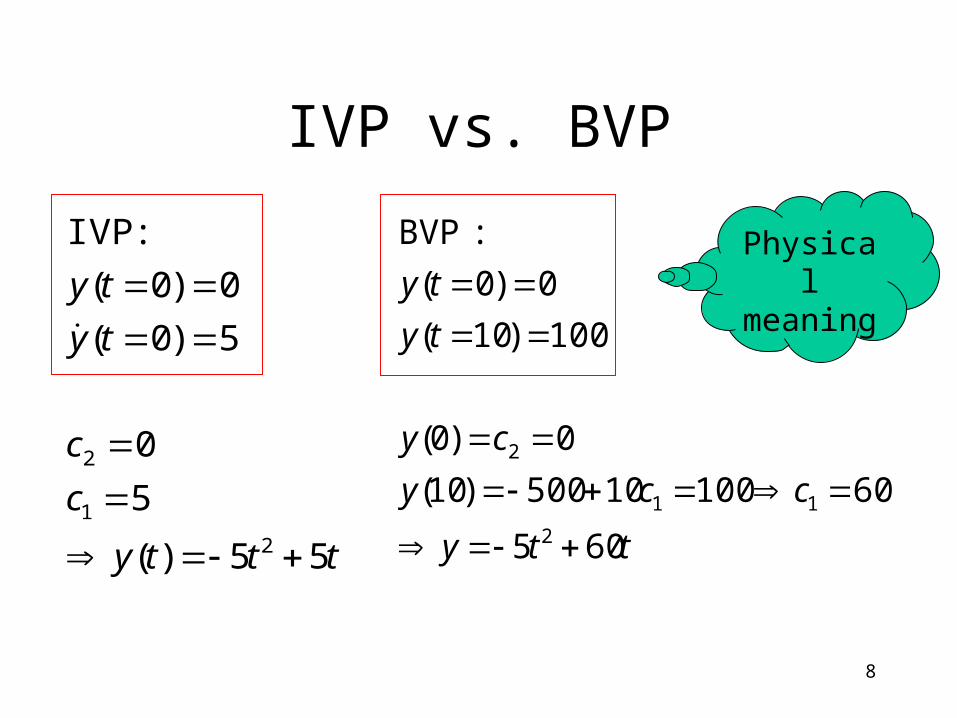
IVP vs. BVP
ttty
c
c
ty
ty
55)(
5
0
5)0(
0)0(
:IVP
2
1
2
tty
ccy
cy
ty
ty
605
6010010500)10(
0)0(
100)10(
0)0(
:BVP
2
11
2
Physical meaning
9
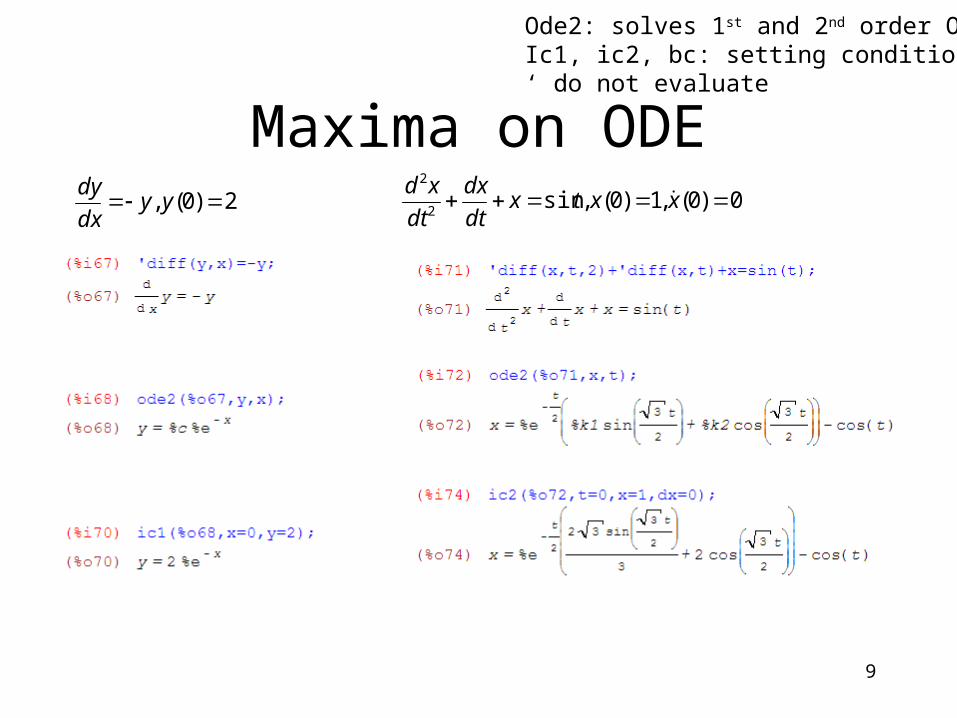
Maxima on ODE
Ode2: solves 1st and 2nd order ODEIc1, ic2, bc: setting conditions‘ do not evaluate
2)0(, yydx
dy0)0(,1)0(,sin
2
2
xxtxdt
dx
dt
xd

10
Linear ODE
• Linearity:– Involves no product nor nonlinear functions of
y and its derivatives
• nth order linear ODE
)()()()()( 011
1
1 xbyxadx
dyxa
dx
ydxa
dx
ydxa
n
n
nn
n
n
11
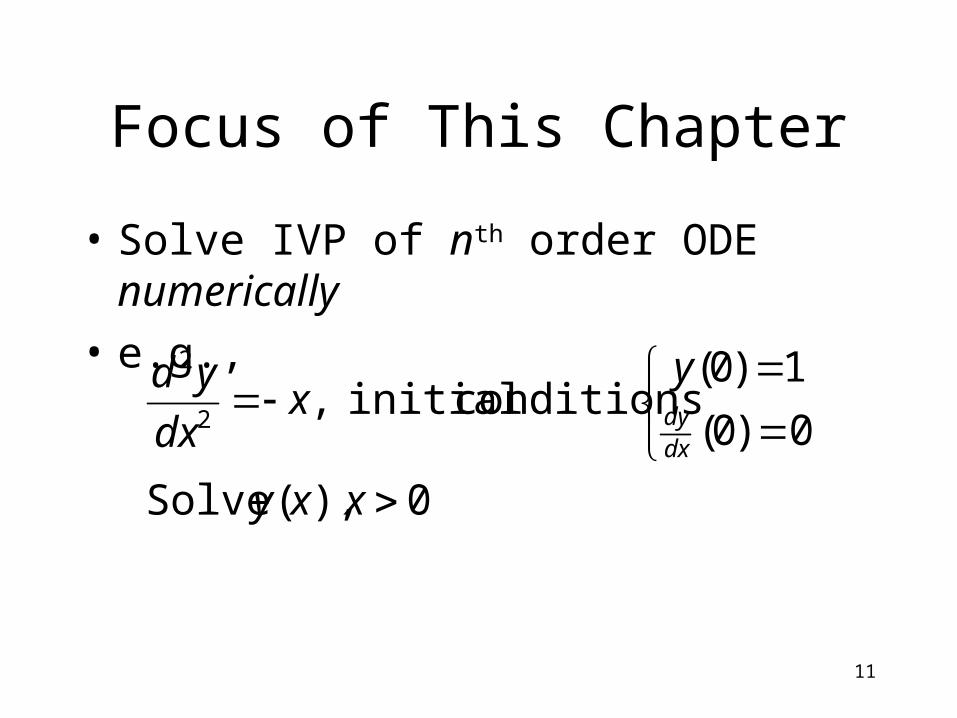
Focus of This Chapter
• Solve IVP of nth order ODE numerically
• e.g.,
0 ),( Solve
0)0(
1)0( conditions initial ,
2
2
xxy
yx
dx
yd
dxdy

12
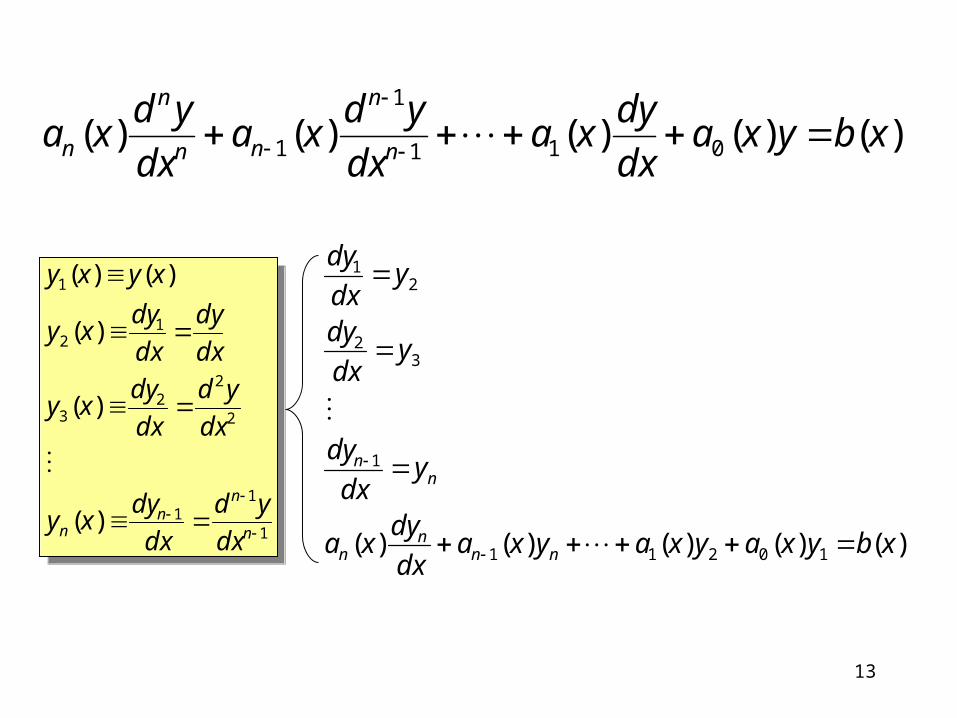
ODE (IVP)
• First order ODE (canonical form)
• Every nth order ODE can be converted to n first order ODEs in the following method:
0)0(),,( yxyyxfdx
dy
13
)()()()()( 011
1
1 xbyxadx
dyxa
dx
ydxa
dx
ydxa
n
n
nn
n
n
1
11
2
22
3
12
1
)(
)(
)(
)()(
n
nn
n dx
yd
dx
dyxy
dx
yd
dx
dyxy
dx
dy
dx
dyxy
xyxy
1
11
2
22
3
12
1
)(
)(
)(
)()(
n
nn
n dx
yd
dx
dyxy
dx
yd
dx
dyxy
dx
dy
dx
dyxy
xyxy
)()()()()( 10211
1
32
21
xbyxayxayxadx
dyxa
ydx
dy
ydx
dy
ydx
dy
nnn
n
nn
14
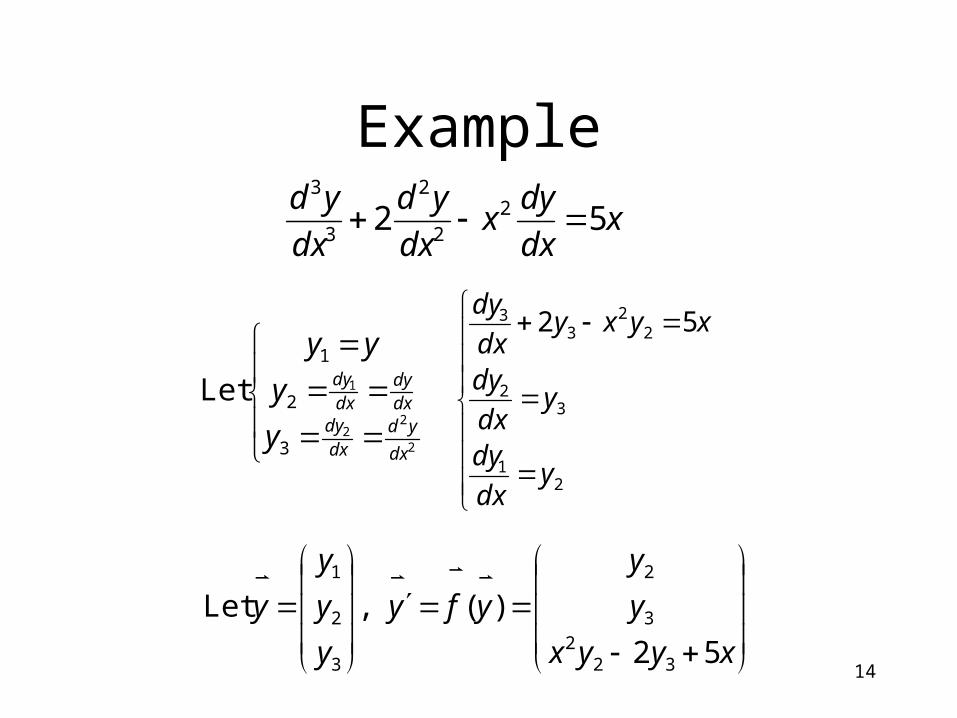
Example
xdx
dyx
dx
yd
dx
yd52 2
2
2
3
3
2
22
1
3
2
1
Let
dx
yddxdy
dxdy
dxdy
y
y
yy
21
32
22
33 52
ydx
dy
ydx
dy
xyxydx
dy
xyyx
y
y
yfy
y
y
y
y
52
)( ,Let
322
3
2
3
2
1
15
End of Review
16
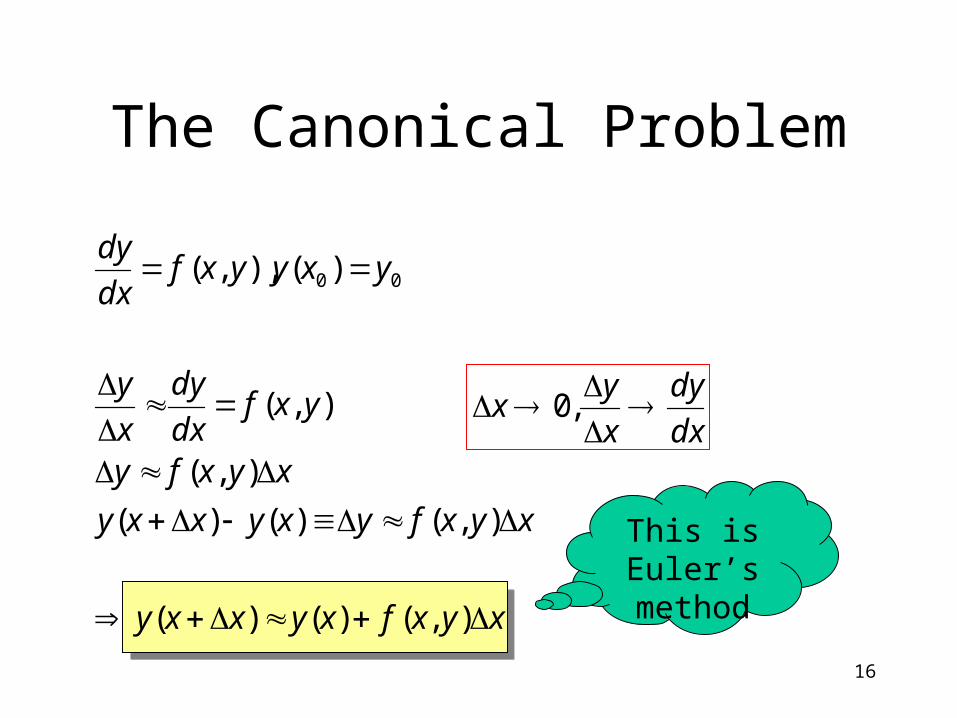
xyxfxyxxy
xyxfyxyxxy
xyxfy
yxfdx
dy
x
y
yxyyxfdx
dy
),()()(
),()()(
),(
),(
)(),,( 00
The Canonical Problem
dx
dy
x
yx
,0
This is Euler’s method
17
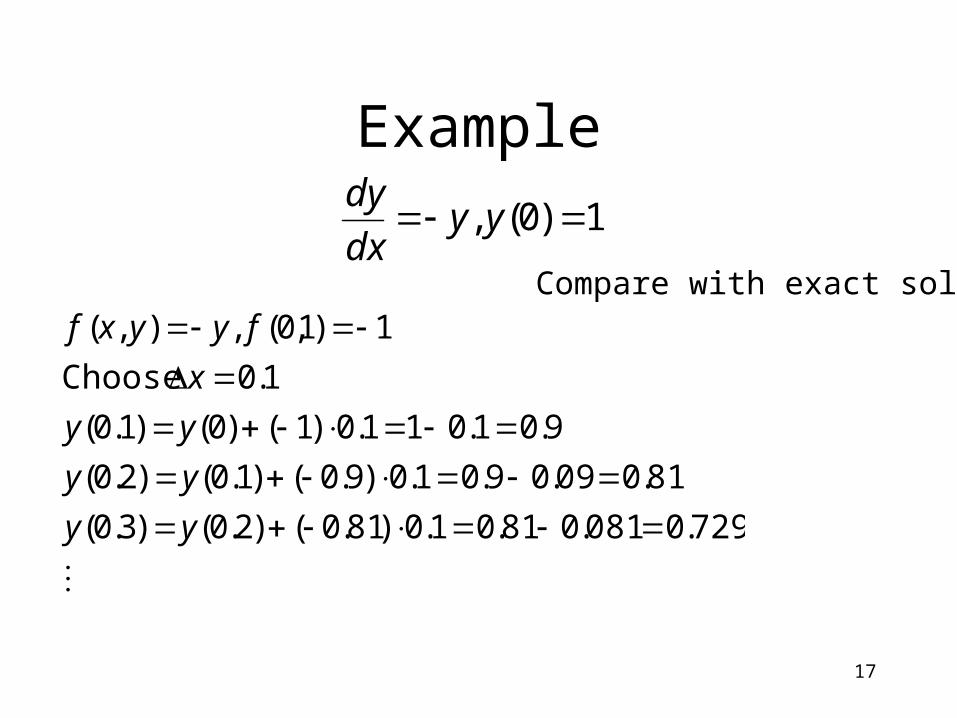
Example
1)0(, yydx
dy
729.0081.081.01.0)81.0()2.0()3.0(
81.009.09.01.0)9.0()1.0()2.0(
9.01.011.0)1()0()1.0(
1.0 Choose
1)1,0(,),(
yy
yy
yy
x
fyyxfCompare with exact sol:
18
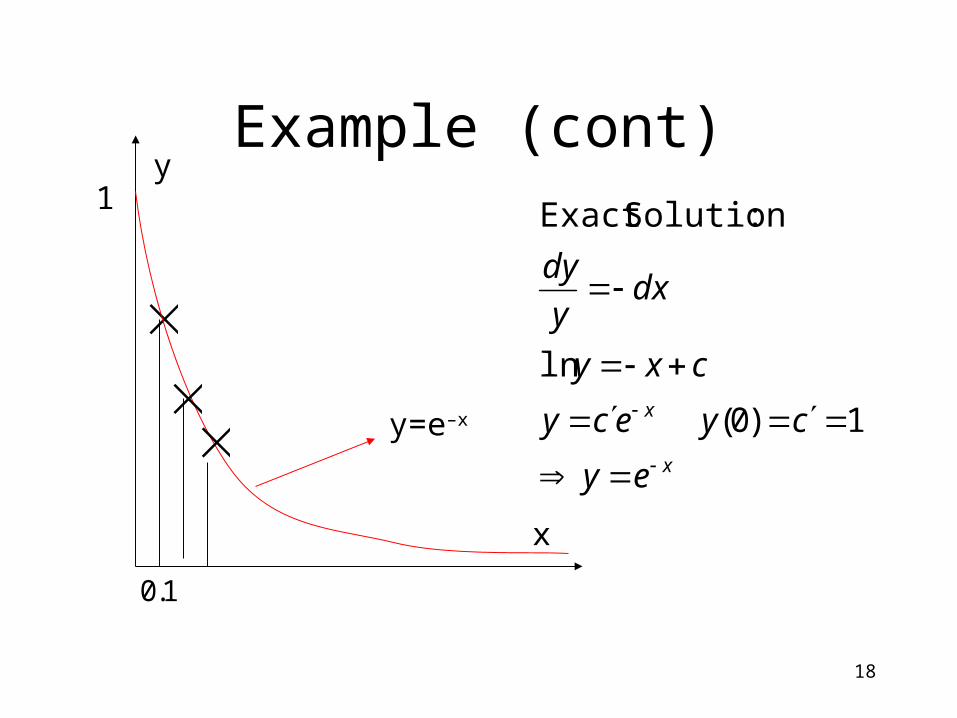
Example (cont)
1)0(
ln
:SolutionExact
x
x
ey
cyecy
cxy
dxy
dy
1.0
1
x
y
y=e–x
19
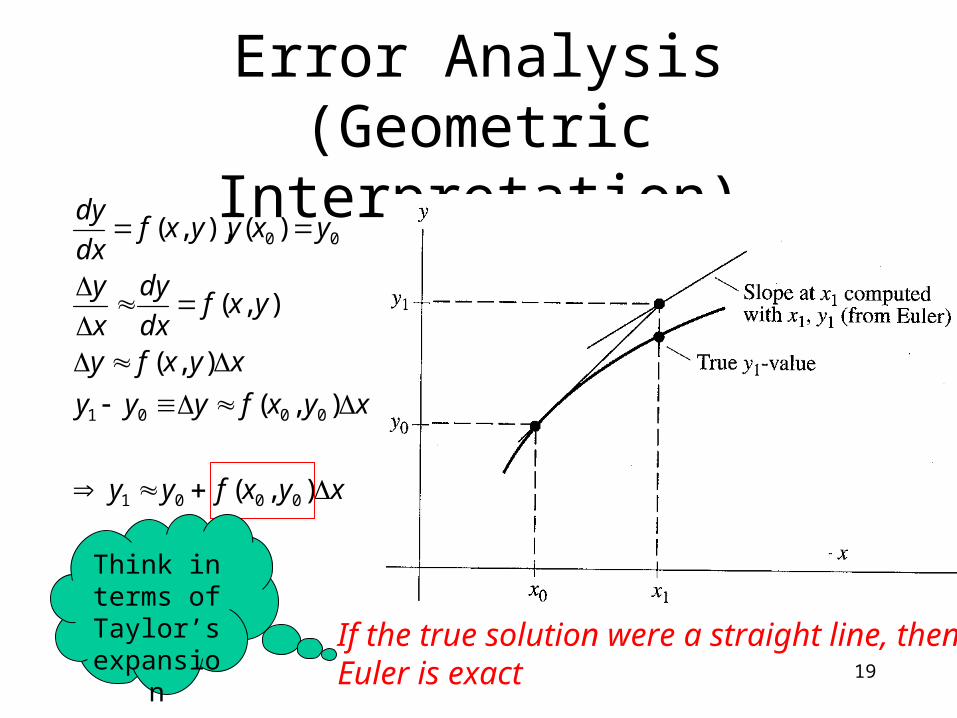
Error Analysis(Geometric Interpretation)
xyxfyy
xyxfyyy
xyxfy
yxfdx
dy
x
y
yxyyxfdx
dy
),(
),(
),(
),(
)(),,(
0001
0001
00
If the true solution were a straight line, thenEuler is exact
Think in terms of Taylor’s
expansion
20
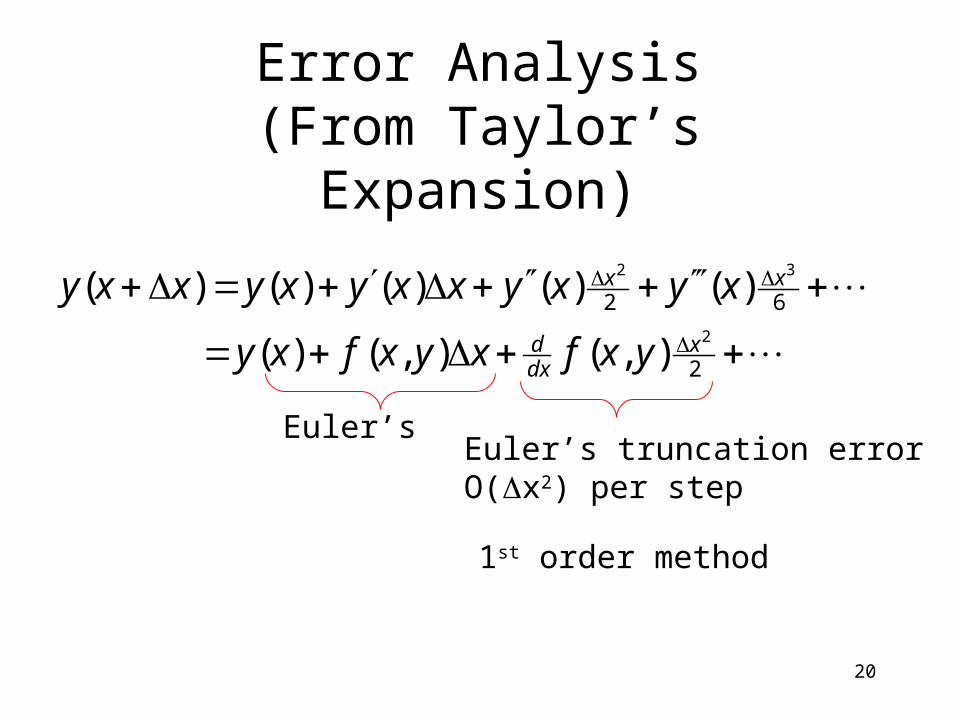
Error Analysis(From Taylor’s Expansion)
2
62
2
32
),(),()(
)()()()()(x
dxd
xx
yxfxyxfxy
xyxyxxyxyxxy
Euler’sEuler’s truncation errorO(x2) per step
1st order method
21
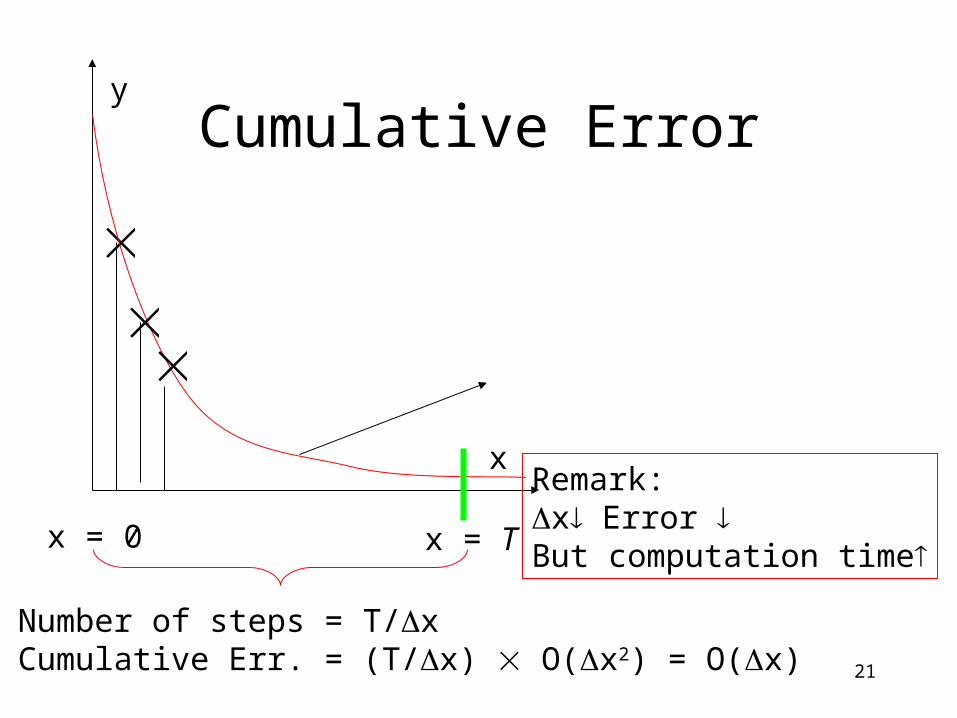
Cumulative Error
x
y
x = 0 x = T
Number of steps = T/xCumulative Err. = (T/x) O(x2) = O(x)
Remark:x Error But computation time
22
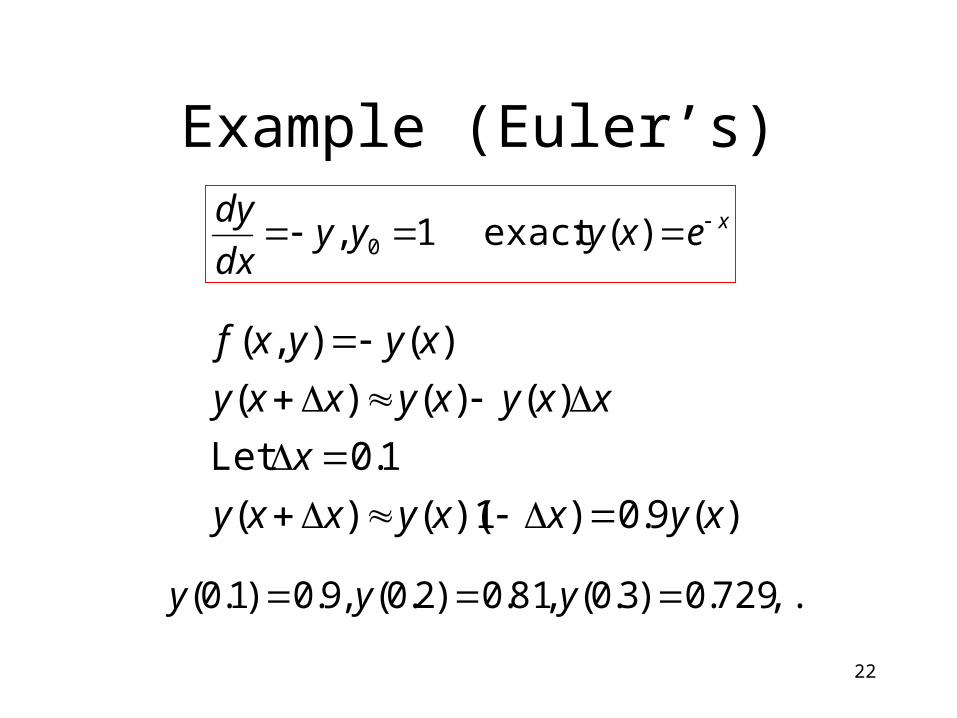
Example (Euler’s)
xexyyydx
dy )(:exact 1, 0
)(9.0)1)(()(
1.0Let
)()()(
)(),(
xyxxyxxy
x
xxyxyxxy
xyyxf
,...729.0)3.0(,81.0)2.0(,9.0)1.0( yyy

23
Methods Improving Euler
Motivated by
Geometric Interpretation
24
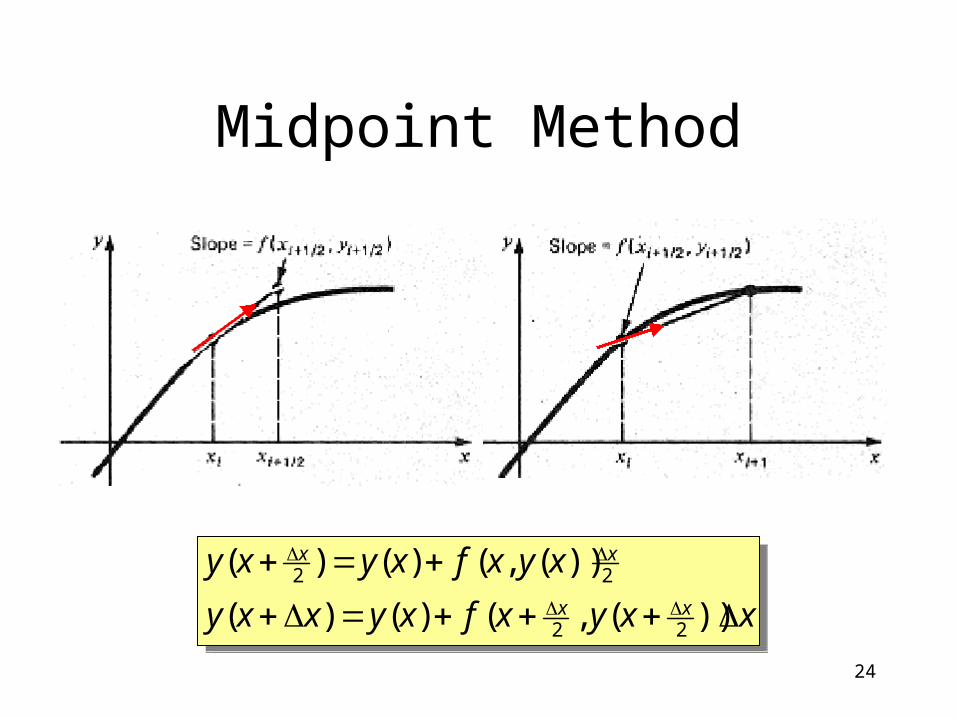
Midpoint Method
xxyxfxyxxy
xyxfxyxyxx
xx
))(,()()(
))(,()()(
22
22
xxyxfxyxxy
xyxfxyxyxx
xx
))(,()()(
))(,()()(
22
22
25
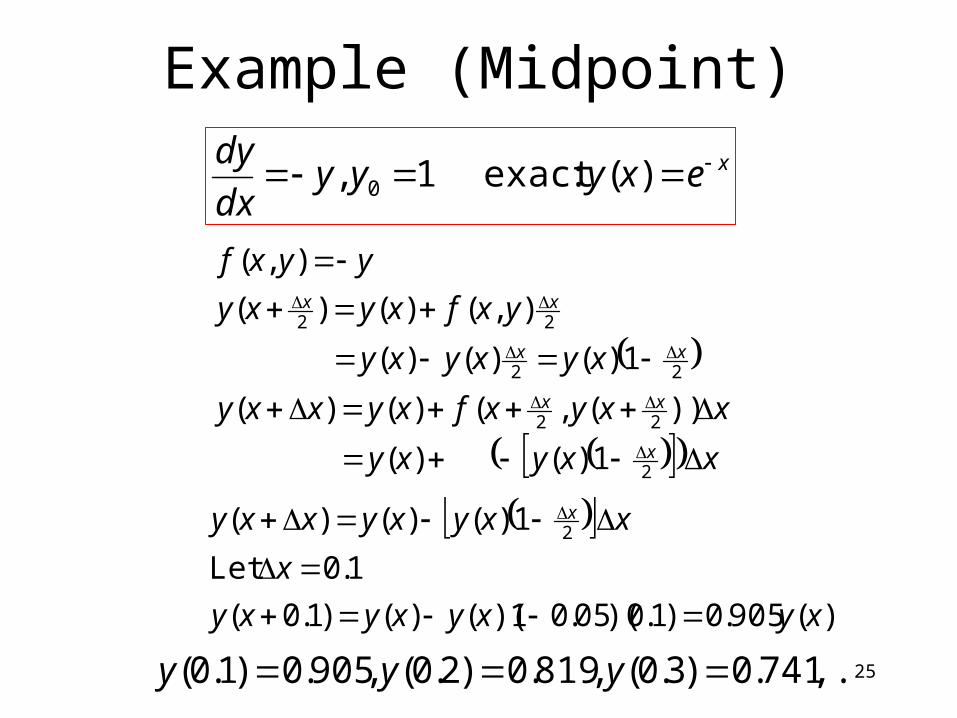
Example (Midpoint)
xxyxy
xxyxfxyxxy
xyxyxy
yxfxyxy
yyxf
x
xx
xx
xx
2
22
22
22
1)( )(
))(,()()(
1)()()(
),()()(
),(
)(905.0)1.0)(05.01)(()()1.0(
1.0Let
1)()()( 2
xyxyxyxy
x
xxyxyxxy x
xexyyydx
dy )(:exact 1, 0
,...741.0)3.0(,819.0)2.0(,905.0)1.0( yyy
26
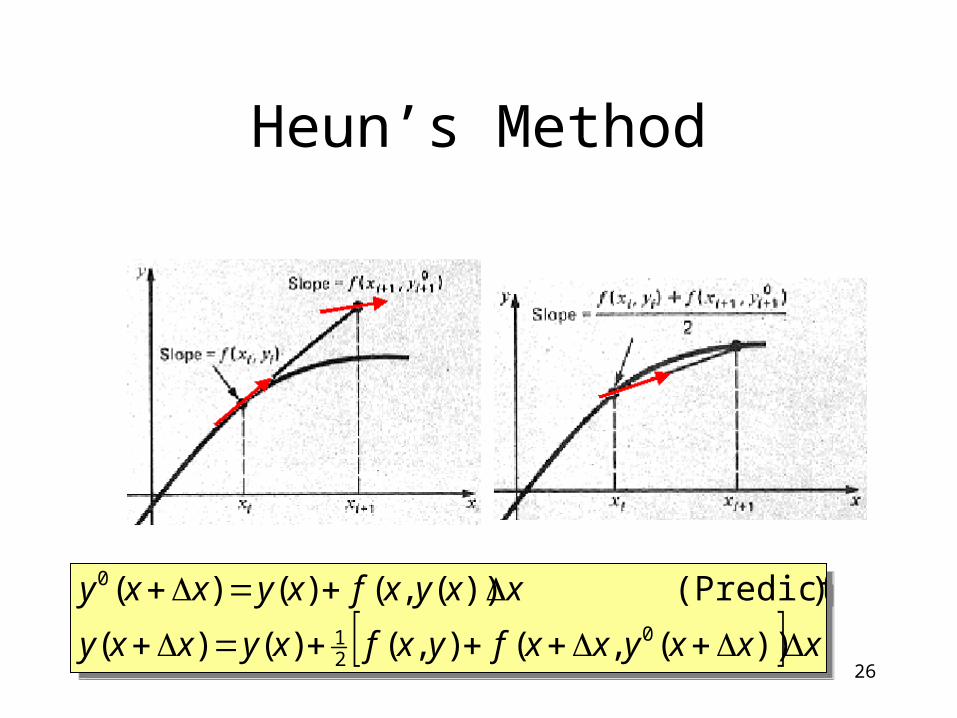
Heun’s Method
xxxyxxfyxfxyxxy
xxyxfxyxxy
))(,(),()()(
)(Predictor ))(,()()(0
21
0
xxxyxxfyxfxyxxy
xxyxfxyxxy
))(,(),()()(
)(Predictor ))(,()()(0
21
0
27
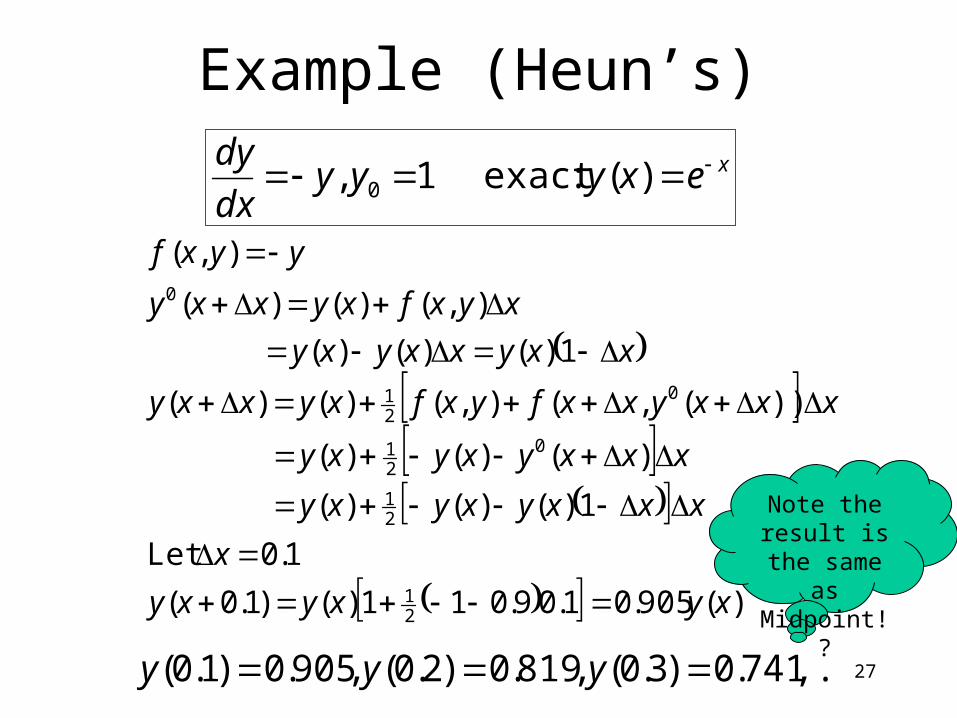
Example (Heun’s)
)(905.01.09.011)()1.0(
1.0Let
1)()()(
)()( )(
))(,(),()()(
1)()()(
),()()(
),(
21
21
021
021
0
xyxyxy
x
xxxyxyxy
xxxyxyxy
xxxyxxfyxfxyxxy
xxyxxyxy
xyxfxyxxy
yyxf
xexyyydx
dy )(:exact 1, 0
,...741.0)3.0(,819.0)2.0(,905.0)1.0( yyy
Note the result is the same as
Midpoint!?
28
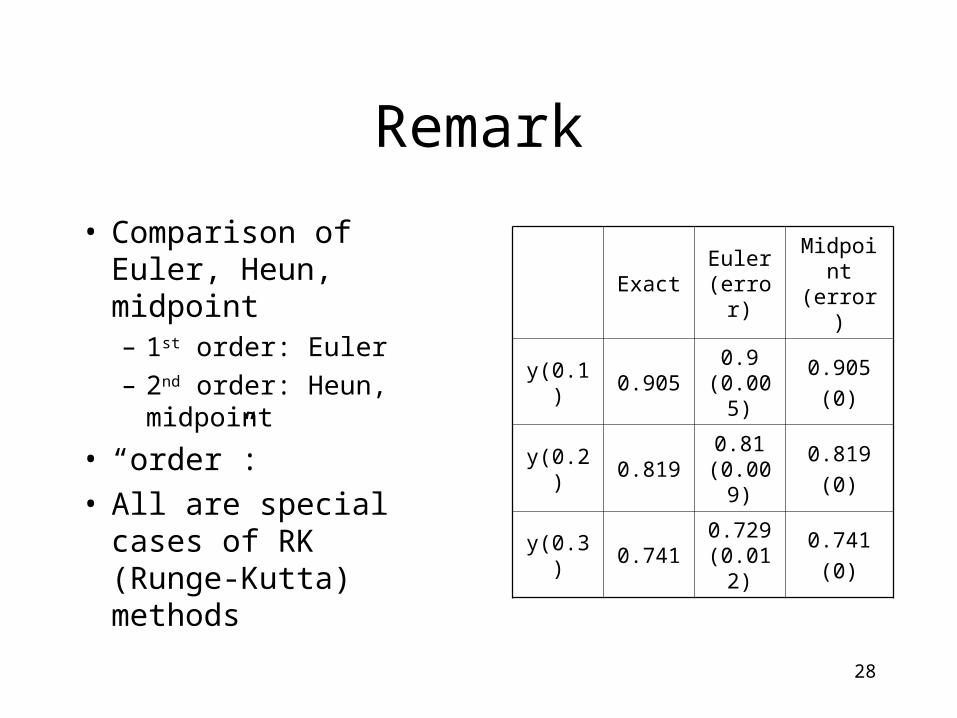
Remark
• Comparison of Euler, Heun, midpoint– 1st order: Euler
– 2nd order: Heun, midpoint
• “order”:• All are special cases of
RK (Runge-Kutta) methods
ExactEuler (error)
Midpoint (error)
y(0.1) 0.9050.9 (0.0
05)0.905
(0)
y(0.2) 0.8190.81 (0.
009)0.819
(0)
y(0.3) 0.7410.729 (0.
012)0.741
(0)
29
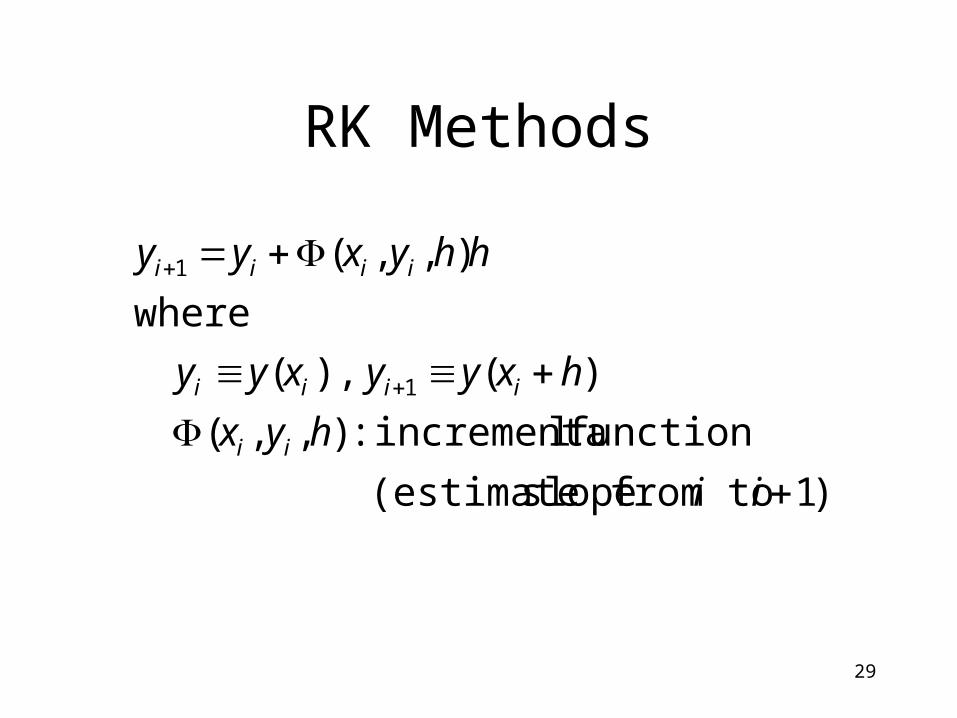
RK Methods
)1 to from slope (estimate
function lincrementa :),,(
)( ),(
where
),,(
1
1
ii
hyx
hxyyxyy
hhyxyy
ii
iiii
iiii
30
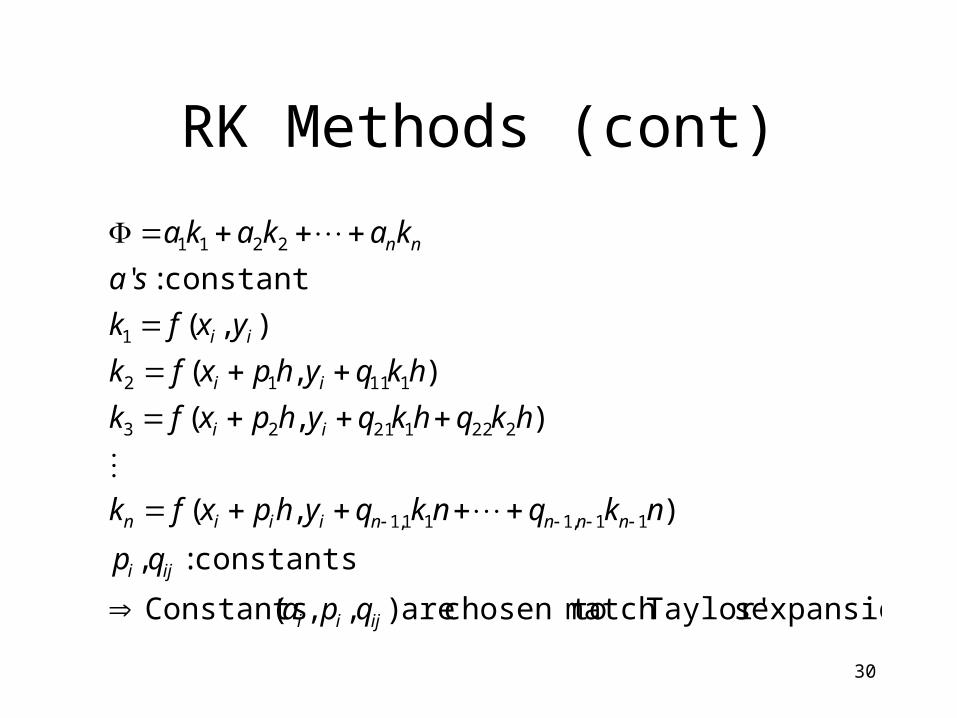
RK Methods (cont)
expansion sTaylor'match chosen to are ),,( Constants
constants:,
),(
),(
),(
),(
constant:'
11,111,1
22212123
11112
1
2211
ijii
iji
nnnniiin
ii
ii
ii
nn
qpa
qp
nkqnkqyhpxfk
hkqhkqyhpxfk
hkqyhpxfk
yxfk
sa
kakaka
31
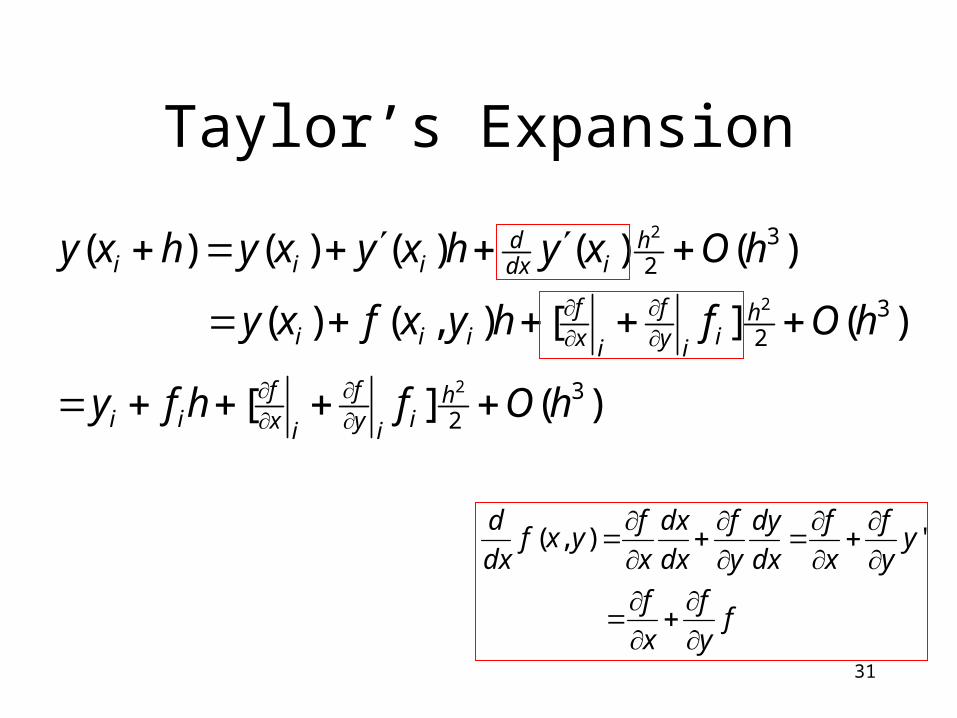
Taylor’s Expansion
fy
f
x
f
yy
f
x
f
dx
dy
y
f
dx
dx
x
fyxf
dx
d
'),(
)(][
)(][),()(
)()()()()(
32
32
32
2
2
2
hOfhfy
hOfhyxfxy
hOxyhxyxyhxy
hiiy
f
ixf
ii
hiiy
f
ixf
iii
hidx
diii
32
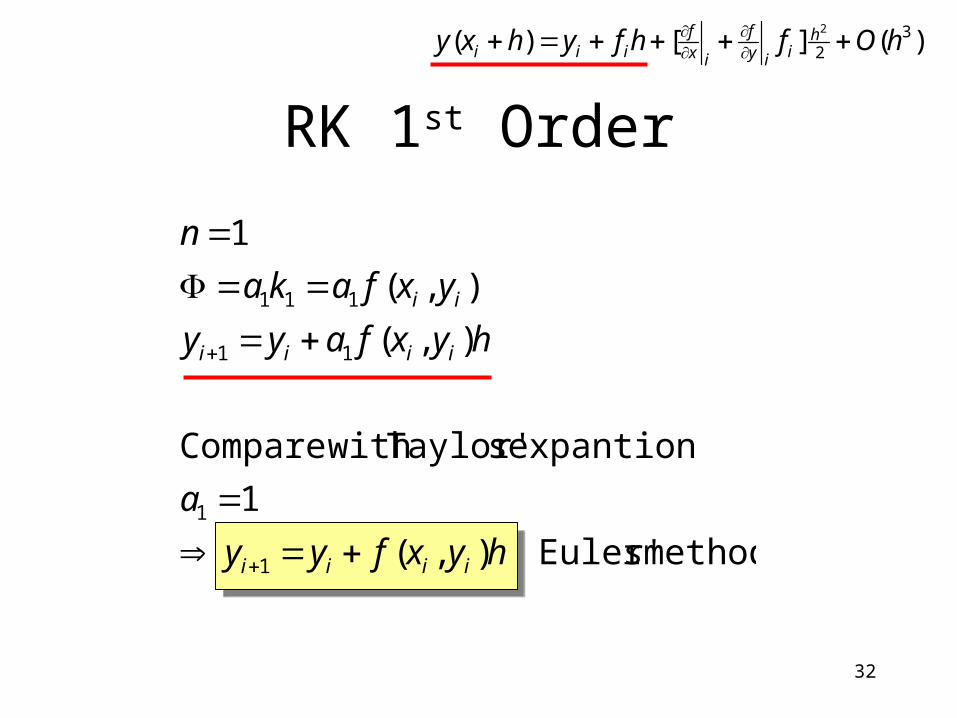
RK 1st Order
method sEuler' ),(
1
expantion sTaylor' with Compare
),(
),(
1
1
1
11
111
hyxfyy
a
hyxfayy
yxfaka
n
iiii
iiii
ii
)(][)( 32
2
hOfhfyhxy hiiy
f
ixf
iii
33
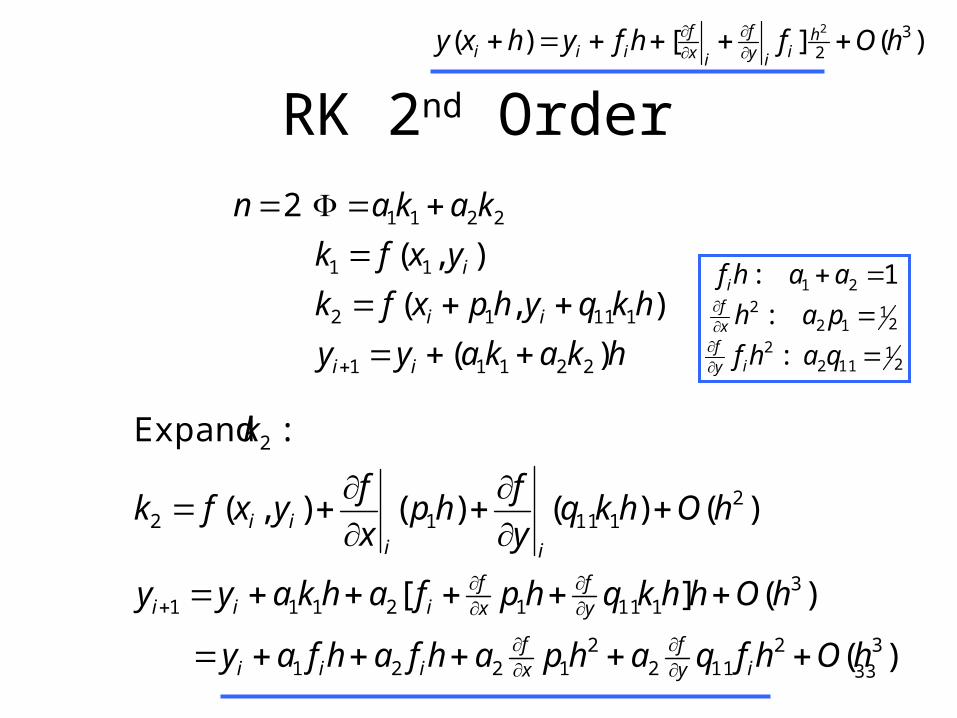
RK 2nd Order
)(
)(][
)()()(),(
: Expand
32112
21221
311112111
211112
2
hOhfqahpahfahfay
hOhhkqhpfahkayy
hOhkqy
fhp
x
fyxfk
k
iyf
xf
iii
yf
xf
iii
iiii
hkakayy
hkqyhpxfk
yxfk
kakan
ii
ii
i
)(
),(
),(
2
22111
11112
11
2211
)(][)( 32
2
hOfhfyhxy hiiy
f
ixf
iii
21
1122
21
122
21
:
:
1 :
qahf
pah
aahf
iyfxfi
34
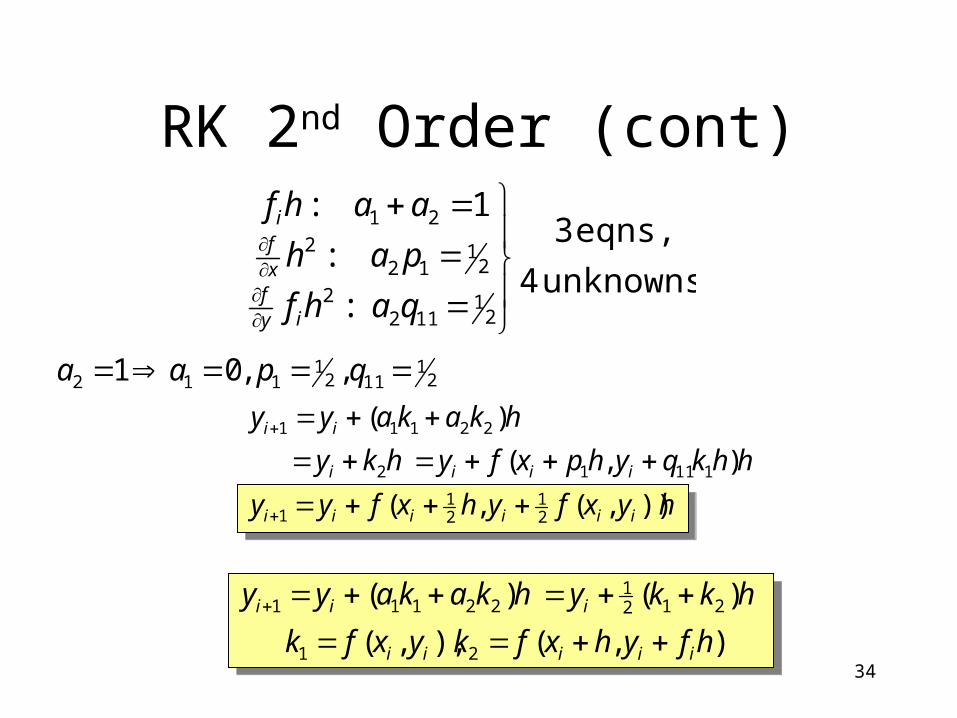
RK 2nd Order (cont)
unknowns 4
eqns, 3
:
:
1 :
21
1122
21
122
21
qahf
pah
aahf
iyfxfi
21
1121
112 , ,01 qpaa
hyxfyhxfyy
hhkqyhpxfyhky
hkakayy
iiiiii
iiii
ii
)),(,(
),(
)(
21
21
1
11112
22111
),(),,(
)( )(
21
2121
22111
hfyhxfkyxfk
hkkyhkakayy
iiiii
iii
35
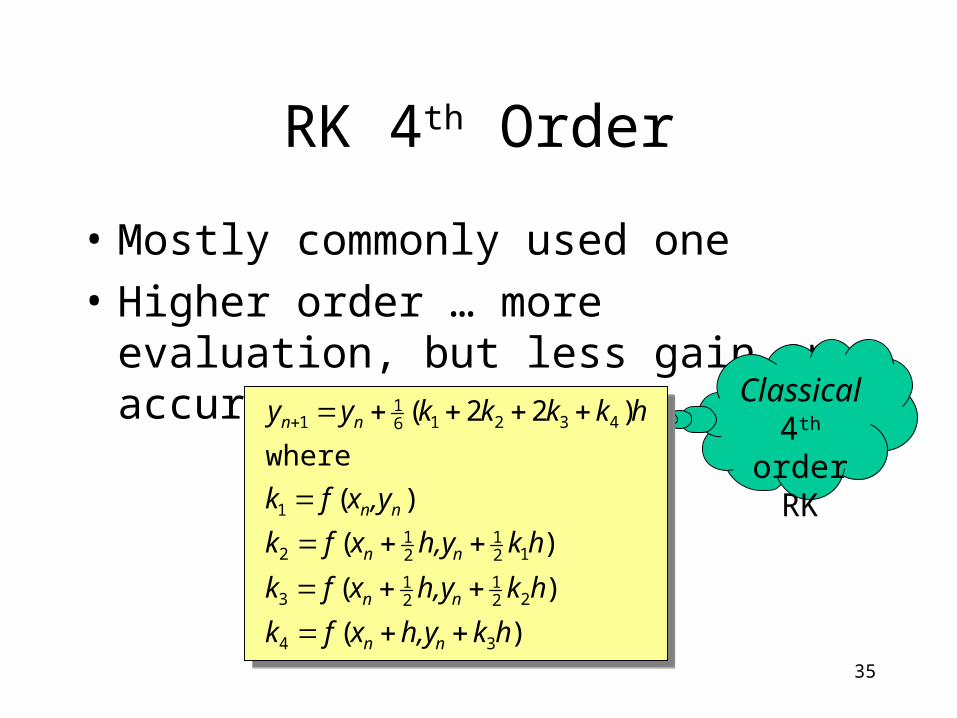
RK 4th Order
• Mostly commonly used one
• Higher order … more evaluation, but less gain on accuracy
Classical 4th order
RK
)(
)(
)(
)(
where
)22(
34
221
21
3
121
21
2
1
432161
1
hkh,yxfk
hkh,yxfk
hkh,yxfk
,yxfk
hkkkkyy
nn
nn
nn
nn
nn
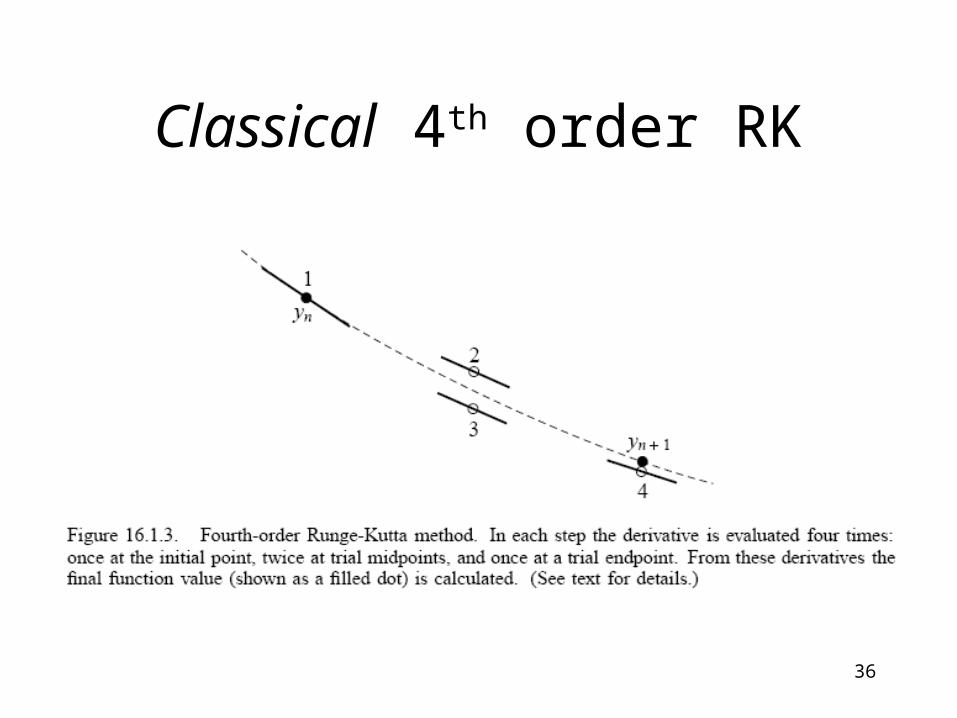
36
Classical 4th order RK
37
System of ODE
• Convert higher order ODE to 1st order ODEs
• All methods equally apply, in vector form
38
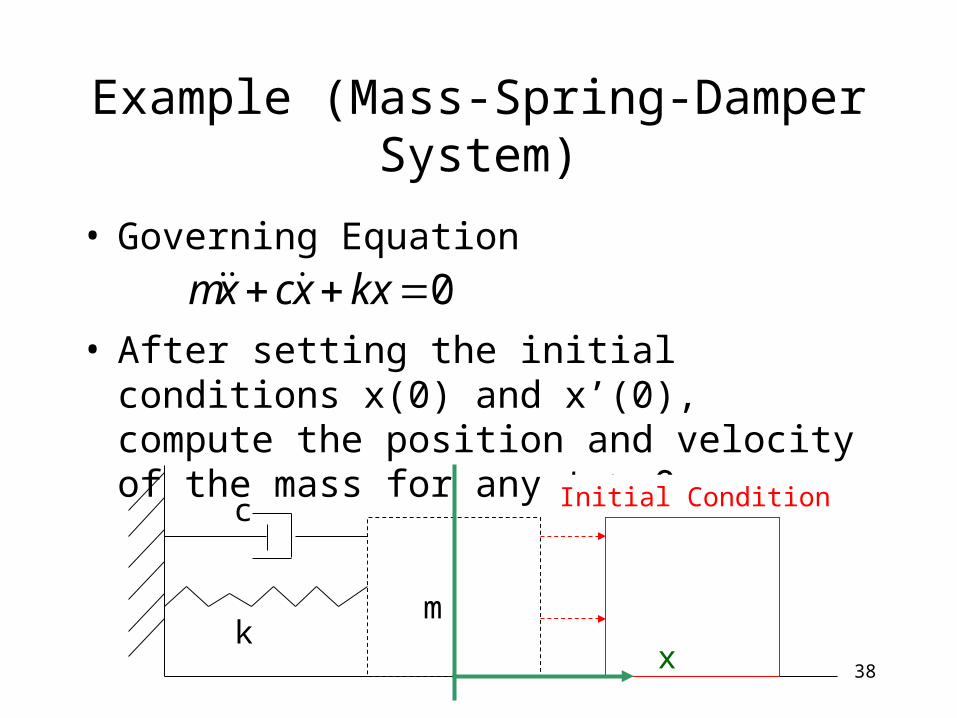
Example (Mass-Spring-Damper System)
• Governing Equation
• After setting the initial conditions x(0) and x’(0), compute the position and velocity of the mass for any t > 0
0 kxxcxm
c
k
Initial Condition
x
m
39
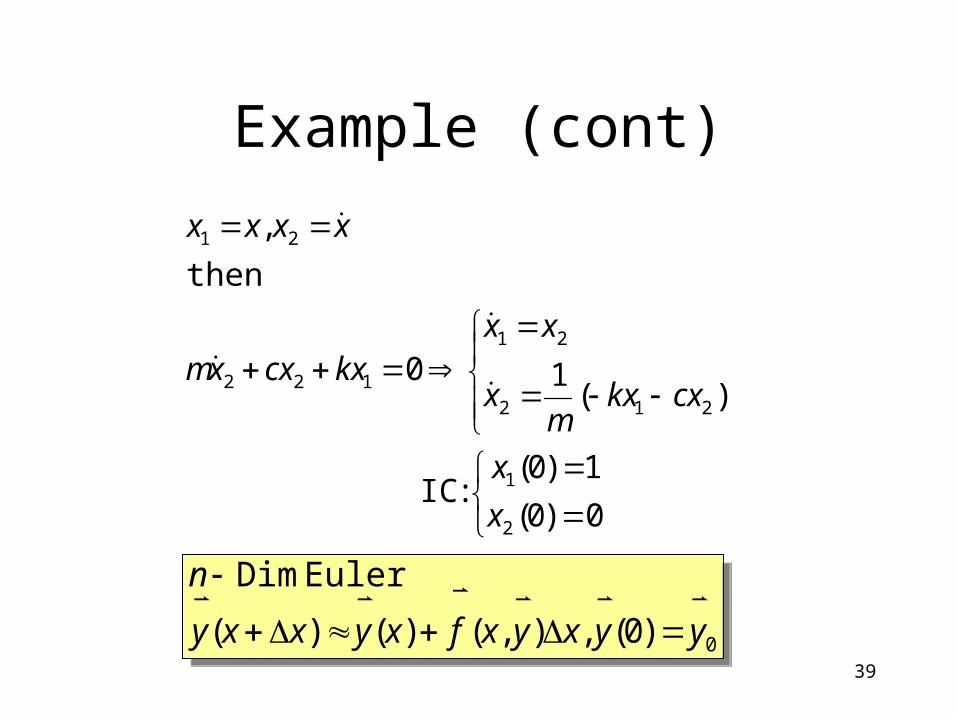
0)0(
1)0(:IC
)(10
then
,
2
1
212
21
122
21
x
x
cxkxm
x
xxkxcxxm
xxxx
Example (cont)
0)0(,),()()(
Euler Dim
yyxyxfxyxxy
n
0)0(,),()()(
Euler Dim
yyxyxfxyxxy
n
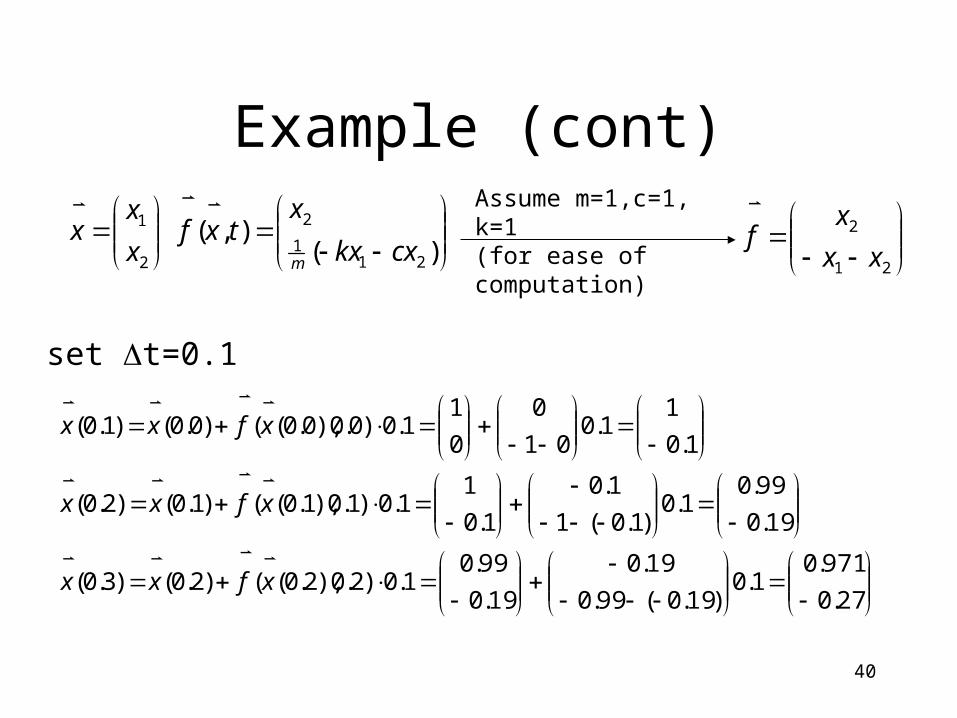
40
set t=0.1
27.0
971.01.0
)19.0(99.0
19.0
19.0
99.01.0)2.0),2.0(()2.0()3.0(
19.0
99.01.0
)1.0(1
1.0
1.0
11.0)1.0),1.0(()1.0()2.0(
1.0
11.0
01
0
0
11.0)0.0),0.0(()0.0()1.0(
xfxx
xfxx
xfxx
Example (cont)
)(),(
211
2
2
1
cxkx
xtxf
x
xx
m
Assume m=1,c=1, k=1 (for ease of computation)
21
2
xx
xf
41
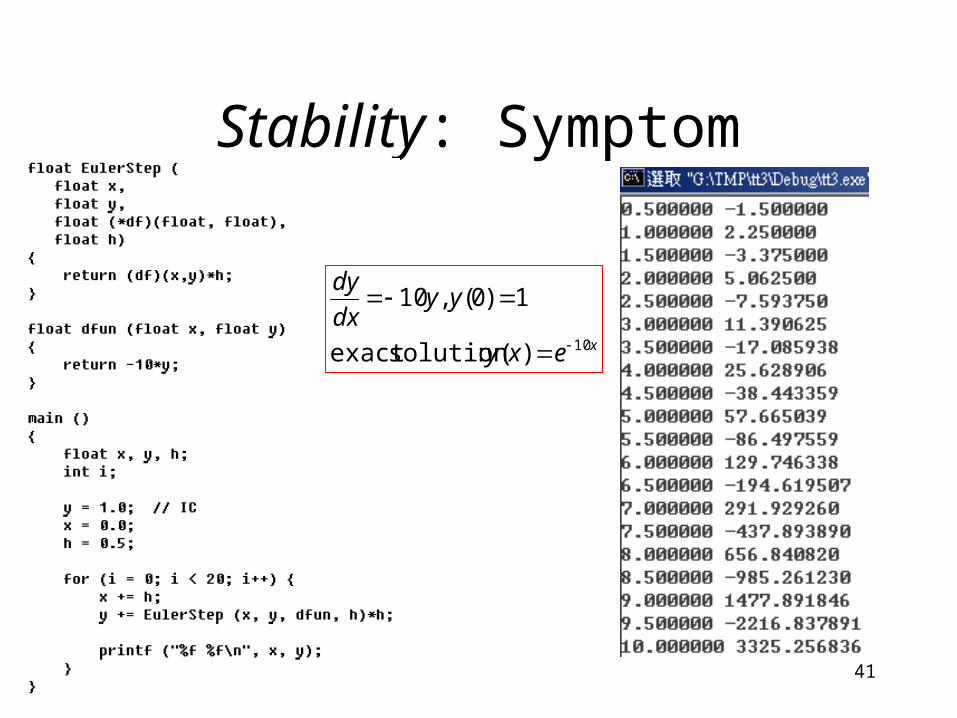
Stability: Symptom
xexy
yydx
dy
10)( :solutionexact
1)0(,10

42
Symptom: Unstable Spring System
Start with this …
Become unstable instantly …
Cause by stiff (k=4000) springsCause by stiff (k=4000) springs
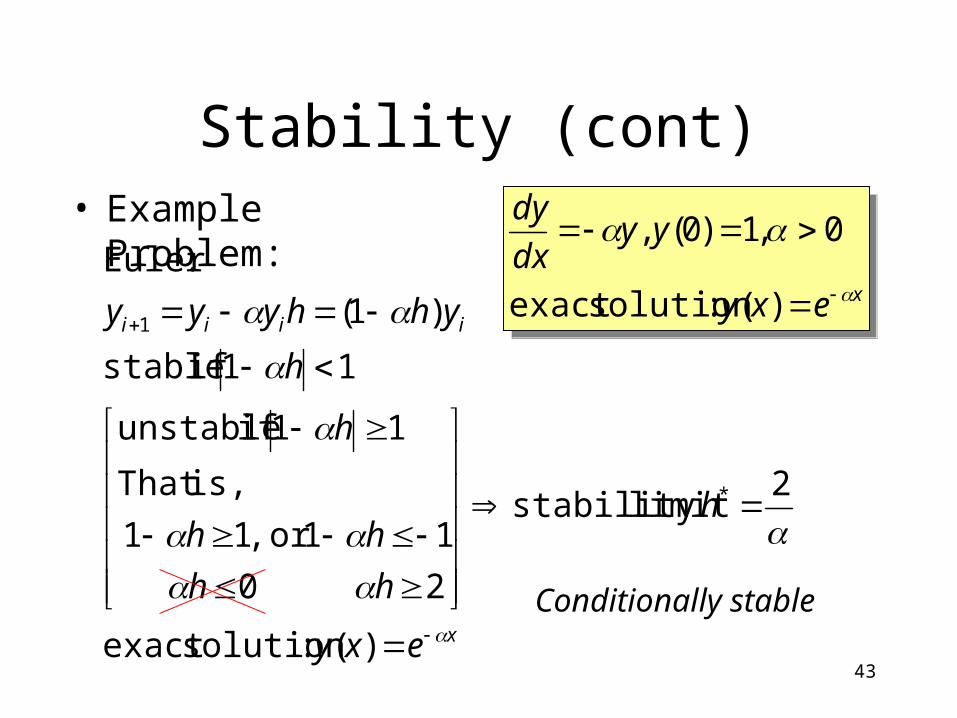
43
Stability (cont)• Example Problem:
xexy
yydx
dy
)( :solutionexact
0,1)0(,
xexy
yydx
dy
)( :solutionexact
0,1)0(,
Conditionally stablex
iiii
exy
h
hh
hh
h
h
yhhyyy
)( :solutionexact
2limit stability
2 0
1 1or ,1 1
is,That
11 if unstable
11 if stable
)1(
:Euler
*
1
44
Discussion
• Different algorithm different stability limit– Check Midpoint Method
• Different problem different stability limit– use the previous problem as benchmark
45
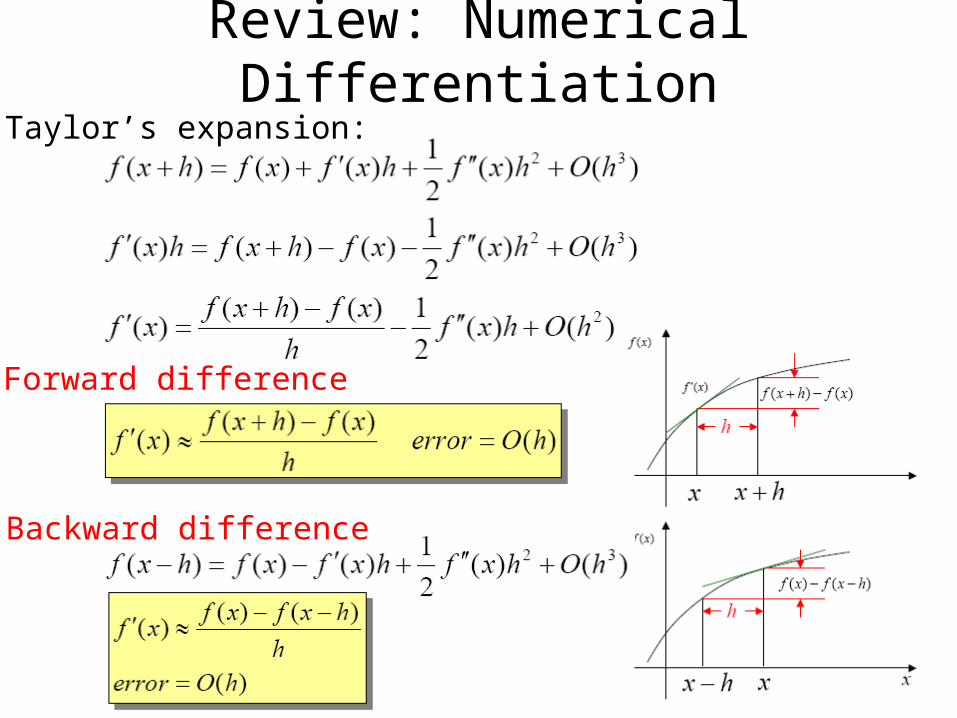
Review: Numerical DifferentiationTaylor’s expansion:
Forward difference
Backward difference
46
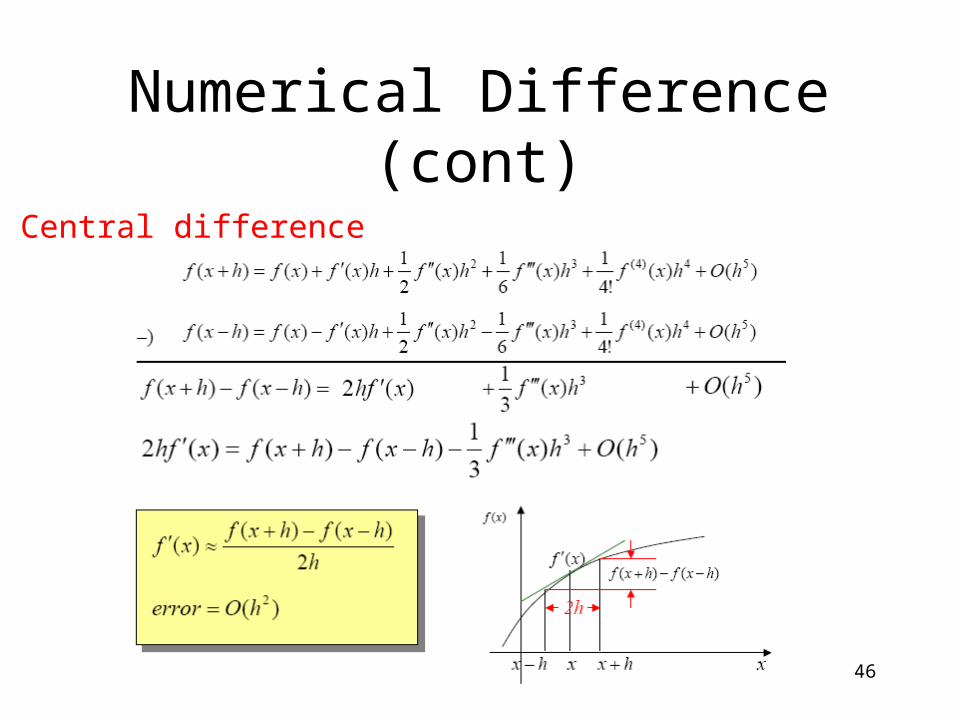
Numerical Difference (cont)
Central difference
47
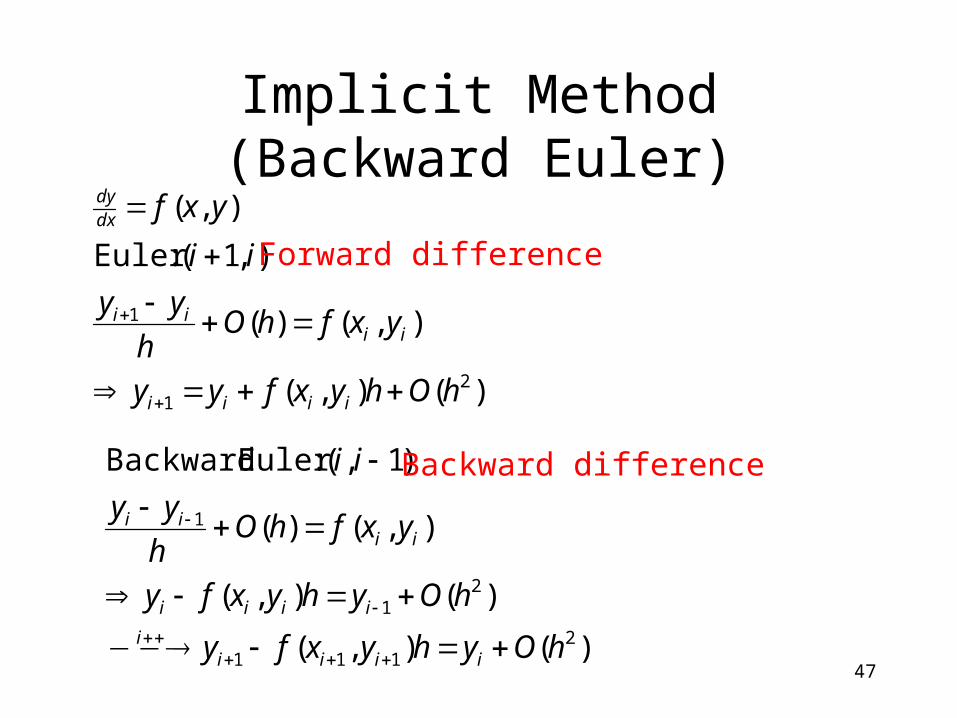
Implicit Method (Backward Euler)
)(),(
)(),(
),()(
)1,(:Euler Backward
2111
21
1
hOyhyxfy
hOyhyxfy
yxfhOh
yy
ii
iiiii
iiii
iiii
)(),(
),()(
),1( :Euler
),(
21
1
hOhyxfyy
yxfhOh
yy
ii
yxf
iiii
iiii
dxdy
Forward difference
Backward difference
48
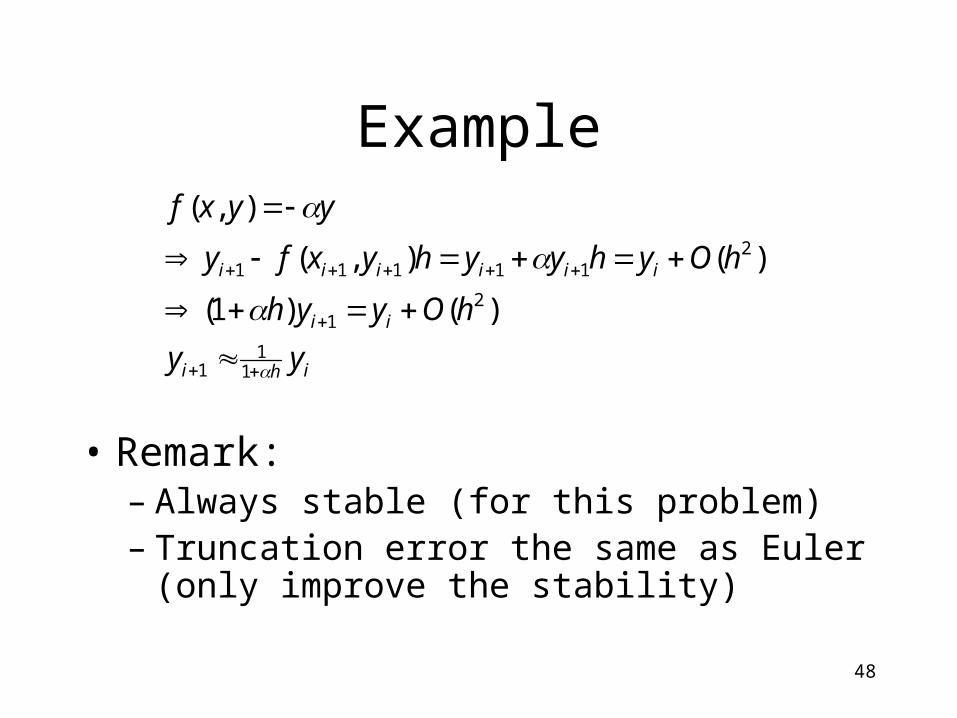
Example
• Remark:– Always stable (for this problem)– Truncation error the same as Euler (only
improve the stability)
ihi
ii
iiiiii
yy
hOyyh
hOyhyyhyxfy
yyxf
11
1
21
211111
)()1(
)(),(
),(
49
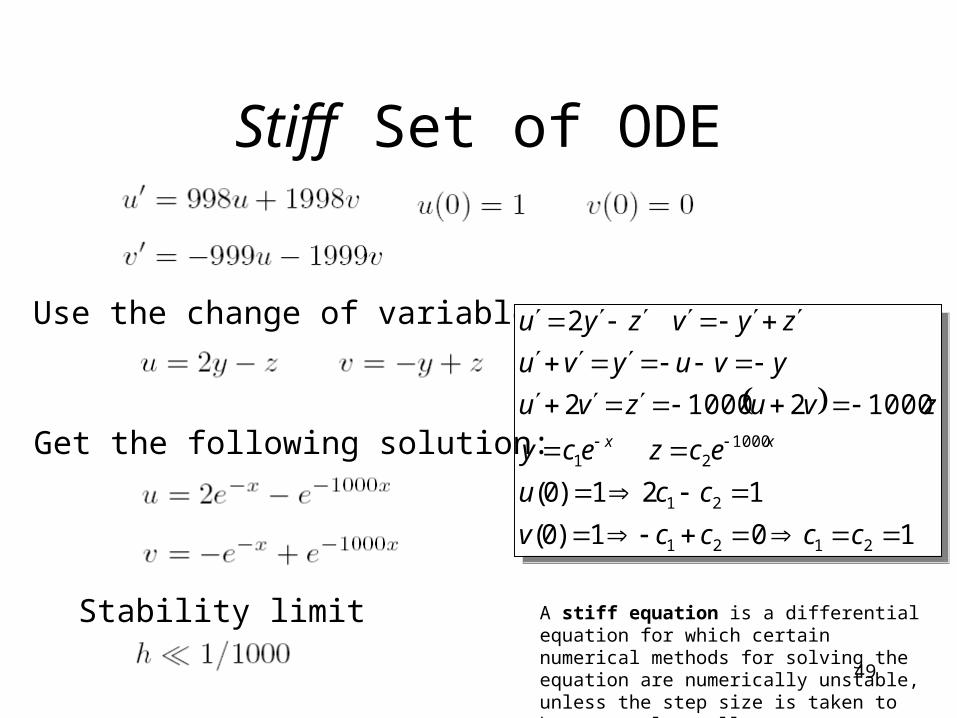
Stiff Set of ODE
Stability limit
Use the change of variable
101)0(
121)0(
1000210002
2
2121
21
100021
ccccv
ccu
eczecy
zvuzvu
yvuyvu
zyvzyu
xx
101)0(
121)0(
1000210002
2
2121
21
100021
ccccv
ccu
eczecy
zvuzvu
yvuyvu
zyvzyu
xxGet the following solution:
A stiff equation is a differential equation for which certain numerical methods for solving the equation are numerically unstable, unless the step size is taken to be extremely small
50
51
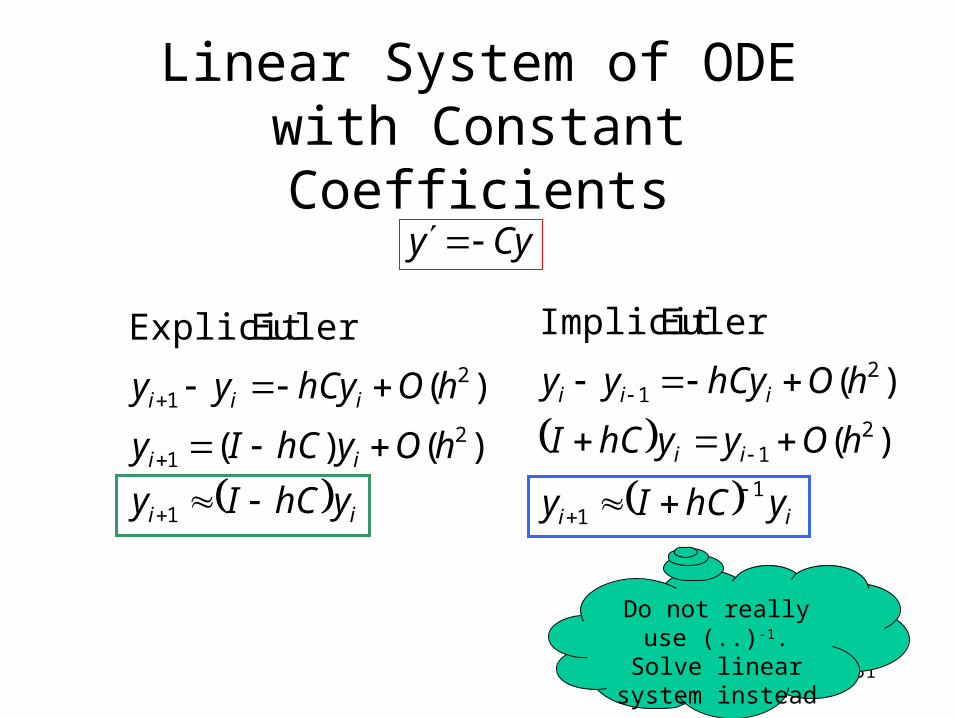
Linear System of ODE with Constant Coefficients
ii
ii
iii
yhCIy
hOyyhCI
hOhCyyy
11
21
21
)(
)(
EulerImplicit
ii
ii
iii
yhCIy
hOyhCIy
hOhCyyy
1
21
21
)()(
)(
EulerExplicit
Cyy
Do not really use (..)-
1. Solve linear system instead
52
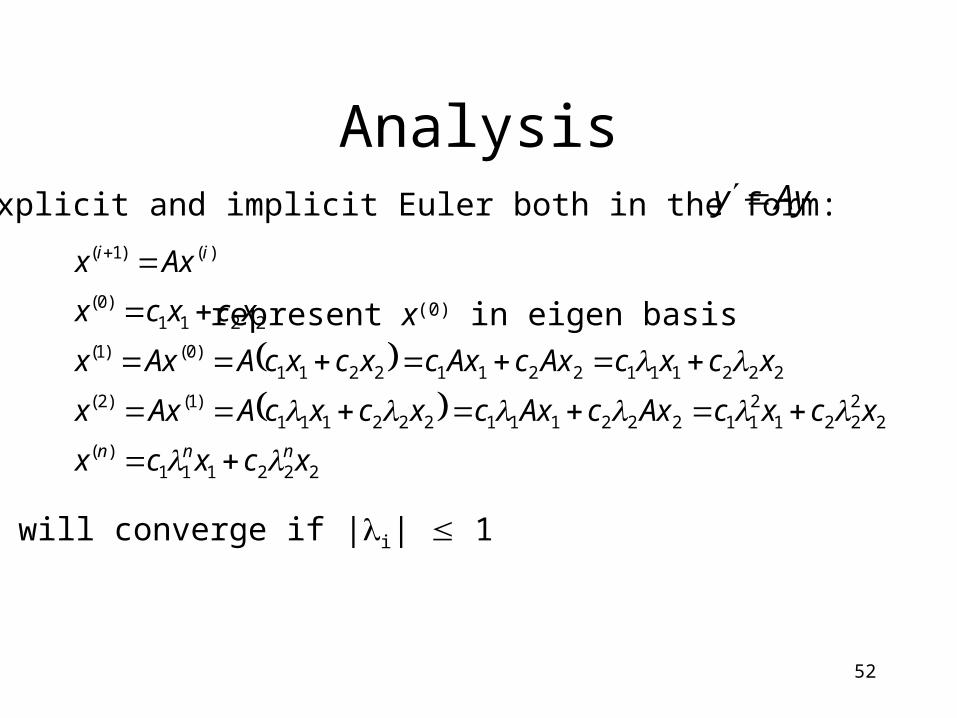
Analysis
222111)(
22221
211222111222111
)1()2(
22211122112211)0()1(
2211)0(
)()1(
xcxcx
xcxcAxcAxcxcxcAAxx
xcxcAxcAxcxcxcAAxx
xcxcx
Axx
nnn
ii
x will converge if |i| 1
represent x(0) in eigen basis
Explicit and implicit Euler both in the form: Ayy
53
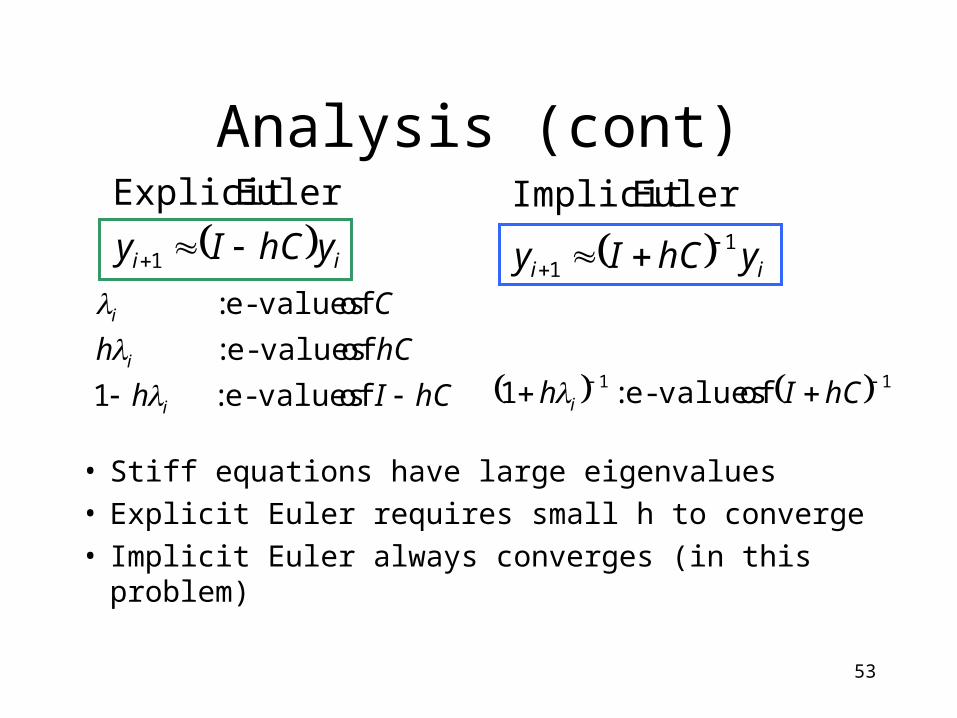
Analysis (cont)
• Stiff equations have large eigenvalues• Explicit Euler requires small h to converge• Implicit Euler always converges (in this problem)
hCIh
hCh
C
i
i
i
of values-e: 1
of values-e:
of values-e :
11 of values-e: 1 hCIh i
ii yhCIy 1
EulerExplicit
ii yhCIy 11
EulerImplicit
54
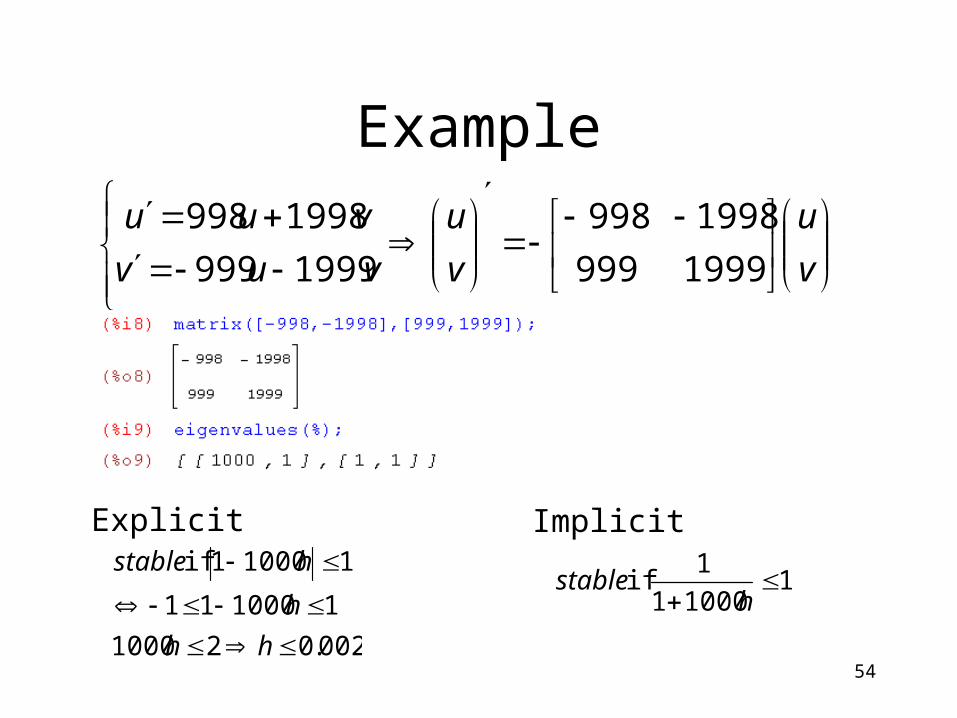
Example
v
u
v
u
vuv
vuu
1999999
1998998
1999999
1998998
Explicit
002.021000
1100011
110001 if
hh
h
hstable
Implicit
110001
1 if
hstable
55
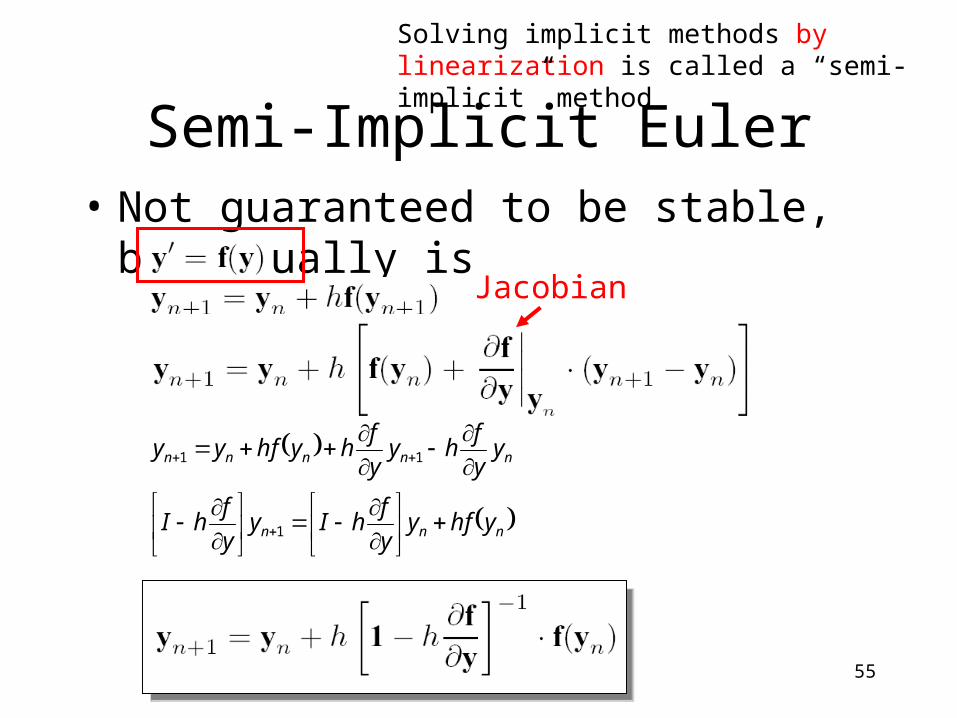
Semi-Implicit Euler• Not guaranteed to be stable, but usually is
Solving implicit methods by linearization is called a “semi-implicit” method
nnn
nnnnn
yhfyy
fhIy
y
fhI
yy
fhy
y
fhyhfyy
1
11
Jacobian
56
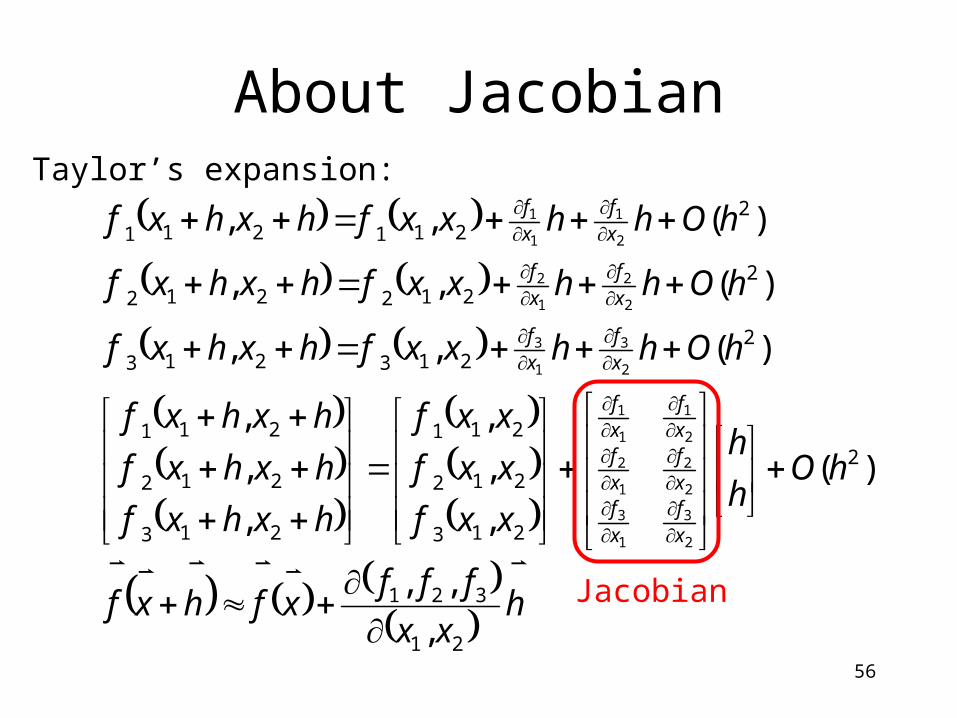
About Jacobian
h
xx
fffxfhxf
hOh
h
xxf
xxf
xxf
hxhxf
hxhxf
hxhxf
hOhhxxfhxhxf
hOhhxxfhxhxf
hOhhxxfhxhxf
xf
xf
xf
xf
xf
xf
xf
xf
xf
xf
xf
xf
21
321
2
213
212
211
213
212
211
2213213
2212212
2211211
,
,,
)(
,
,
,
,
,
,
)(,,
)(,,
)(,,
2
3
1
3
2
2
1
2
2
1
1
1
2
3
1
3
2
2
1
2
2
1
1
1
Jacobian
Taylor’s expansion:

57
c
k
Initial Condition
x
m
0
:Motion ofEquation
kxxcxm
xmkxxcxmf
nn yhh
hy
yy
xxx
xx
xx
xx
kcm
1
1
212
21
2
1
1
1
11
10
1Let
xc
force damping
Implicit Euler
ii yhCIy
Cyy1
1
58
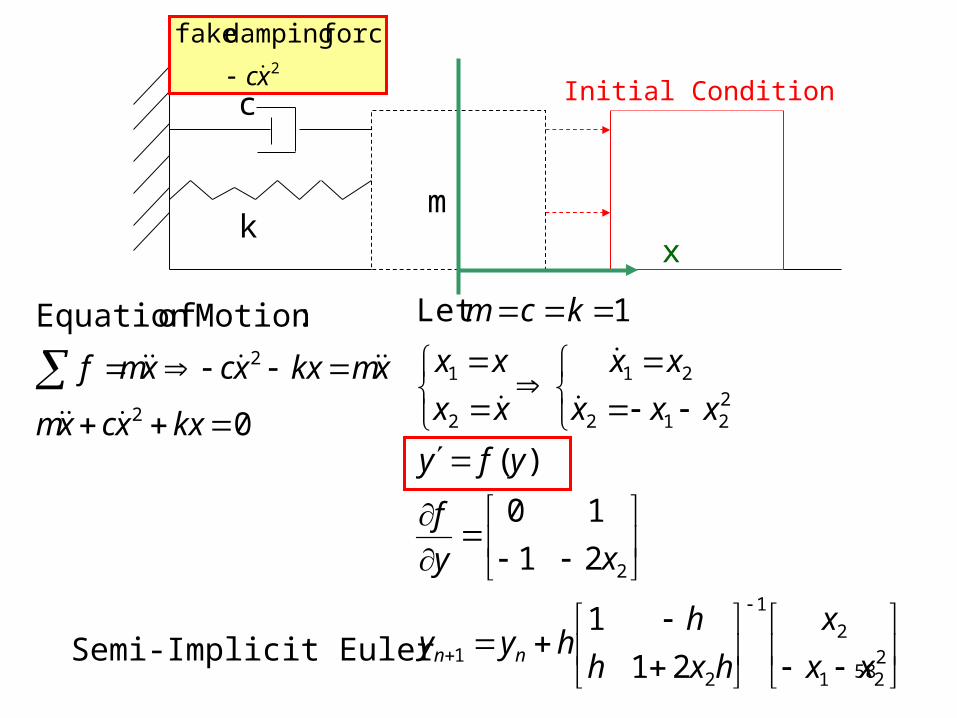
c
k
Initial Condition
x
m
0
:Motion ofEquation
2
2
kxxcxm
xmkxxcxmf
221
2
1
21
2
2212
21
2
1
21
1
21
10
)(
1Let
xx
x
hxh
hhyy
xy
f
yfy
xxx
xx
xx
xx
kcm
nn
2
force damping fake
xc
Semi-Implicit Euler
59
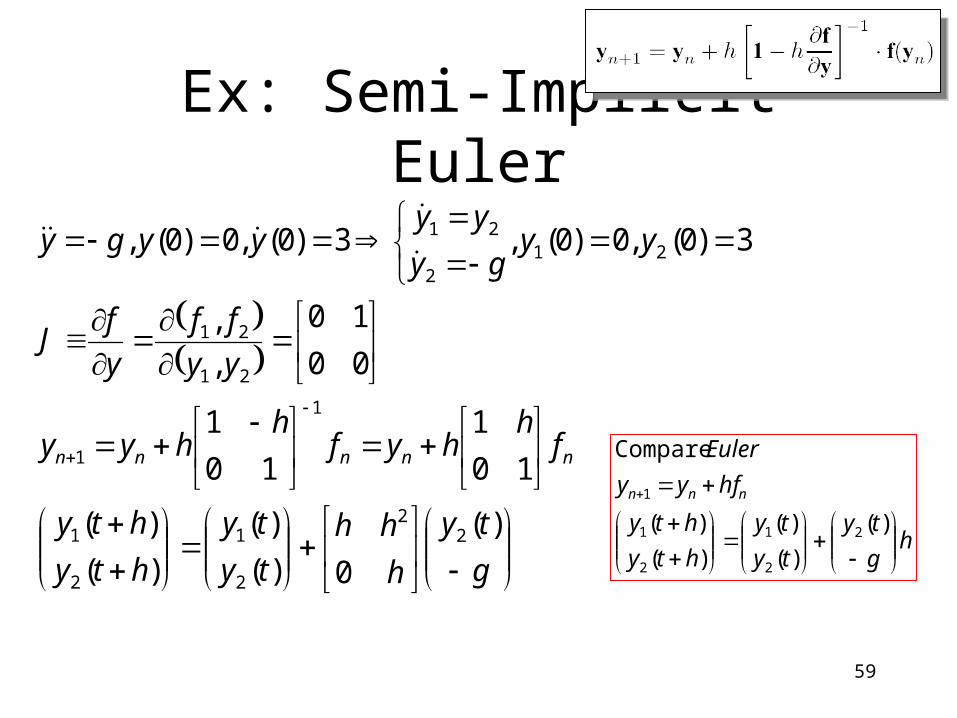
Ex: Semi-Implicit Euler
g
ty
h
hh
ty
ty
hty
hty
fh
hyfh
hyy
yy
ff
y
fJ
yygy
yyyygy
nnnnn
)(
0)(
)(
)(
)(
10
1
10
1
00
10
,
,
3)0(,0)0(,3)0(,0)0(,
22
2
1
2
1
1
1
21
21
212
21
hg
ty
ty
ty
hty
hty
hfyy
Euler
nnn
)(
)(
)(
)(
)(
Compare
2
2
1
2
1
1
60
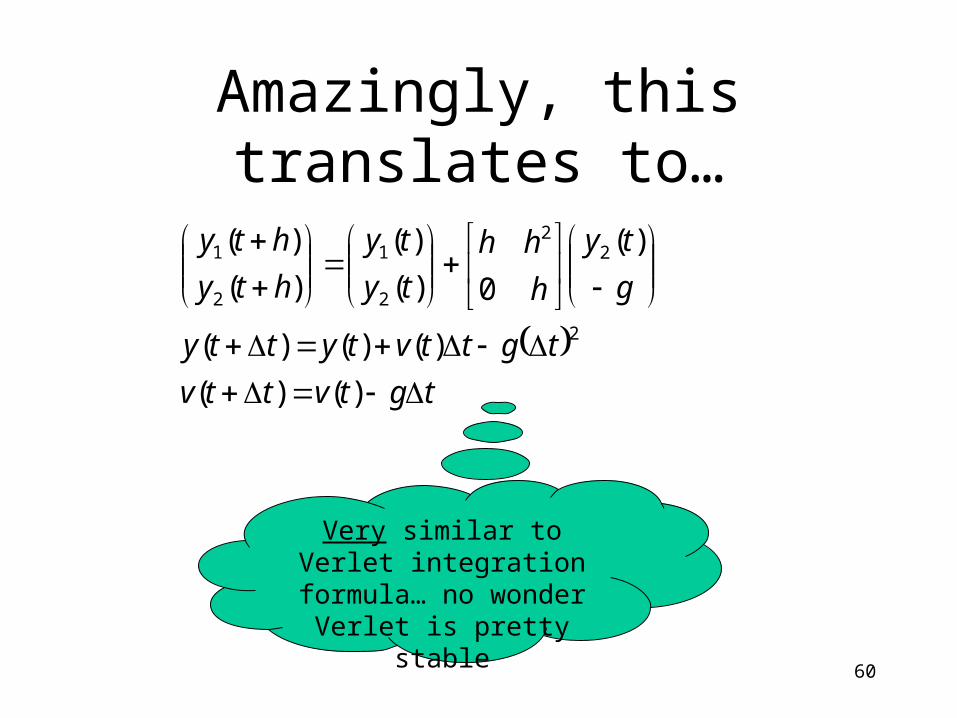
Amazingly, this translates to…
tgtvttv
tgttvtytty
g
ty
h
hh
ty
ty
hty
hty
)()(
)()()(
)(
0)(
)(
)(
)(
2
22
2
1
2
1
Very similar to Verlet integration formula… no
wonder Verlet is pretty stable
61
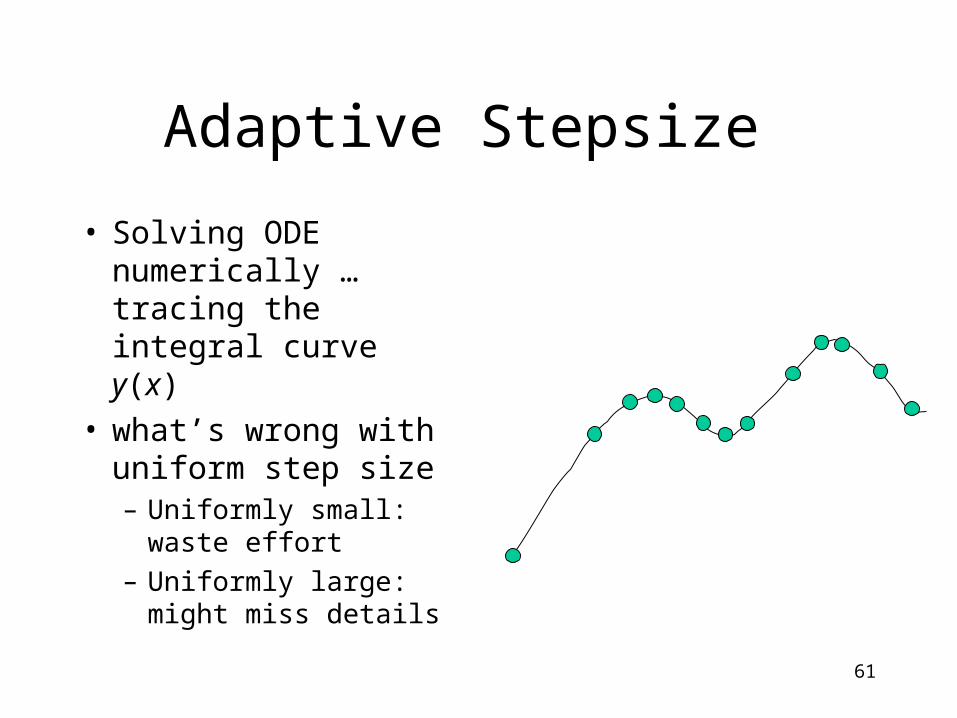
Adaptive Stepsize
• Solving ODE numerically … tracing the integral curve y(x)
• what’s wrong with uniform step size– Uniformly small:
waste effort
– Uniformly large: might miss details
62
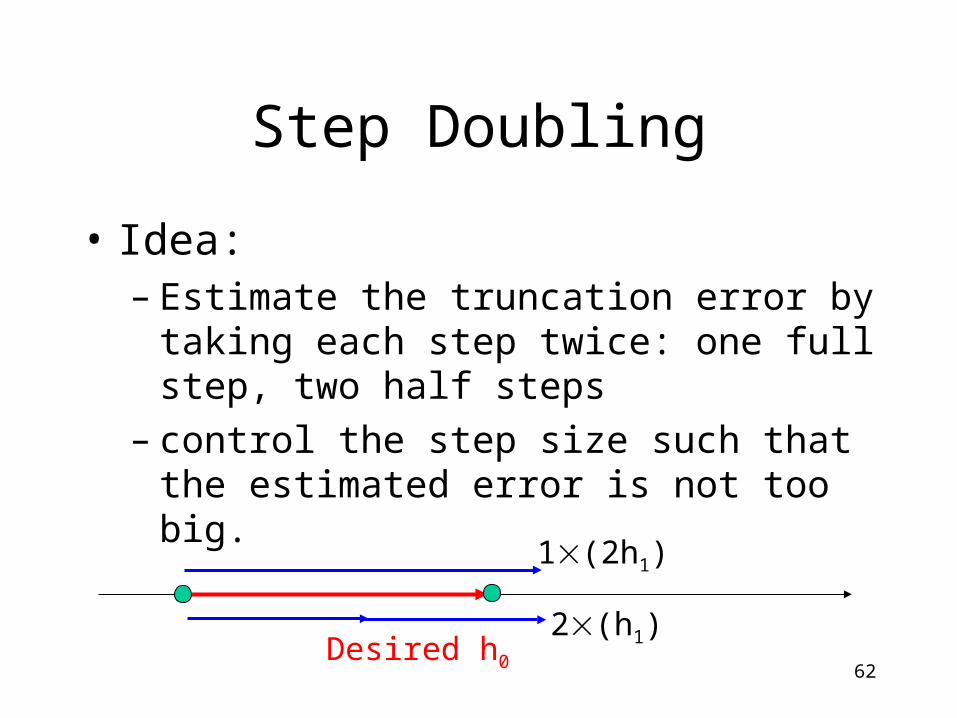
Step Doubling
• Idea:– Estimate the truncation error by taking each
step twice: one full step, two half steps– control the step size such that the estimated
error is not too big.
1(2h1)
2(h1)Desired h0
63
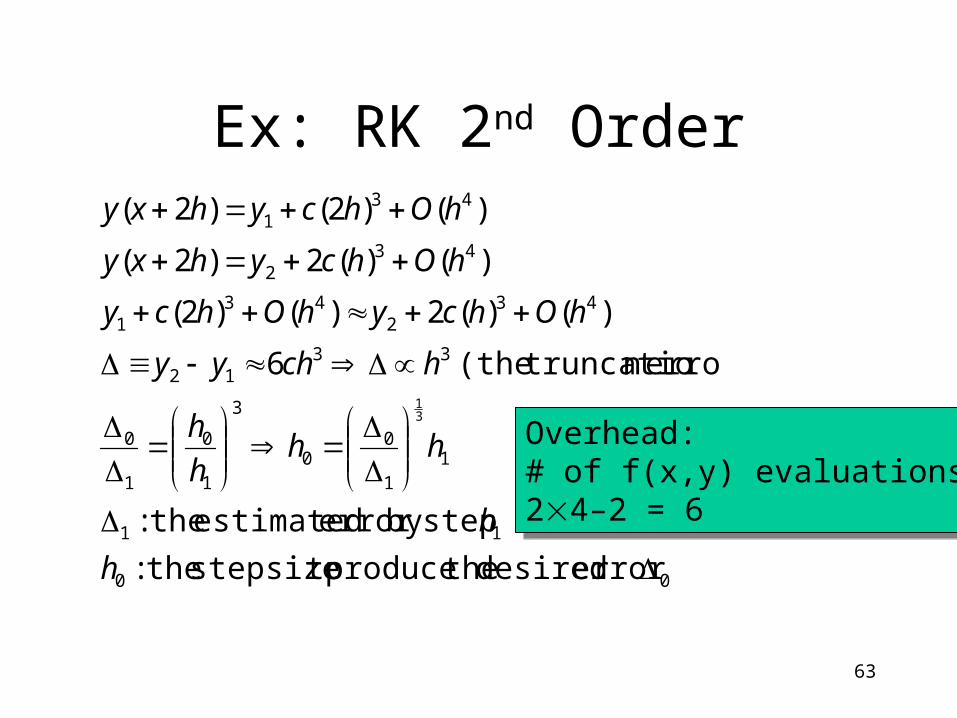
Ex: RK 2nd Order
00
11
11
00
3
1
0
1
0
3312
432
431
432
431
error desired theproduce tostepsize the:
stepby error estimated the:
error)n truncatio(the 6
)()(2)()2(
)()(2)2(
)()2()2(
31
h
h
hhh
h
hchyy
hOhcyhOhcy
hOhcyhxy
hOhcyhxy
Overhead: # of f(x,y) evaluations24–2 = 6
Overhead: # of f(x,y) evaluations24–2 = 6
64
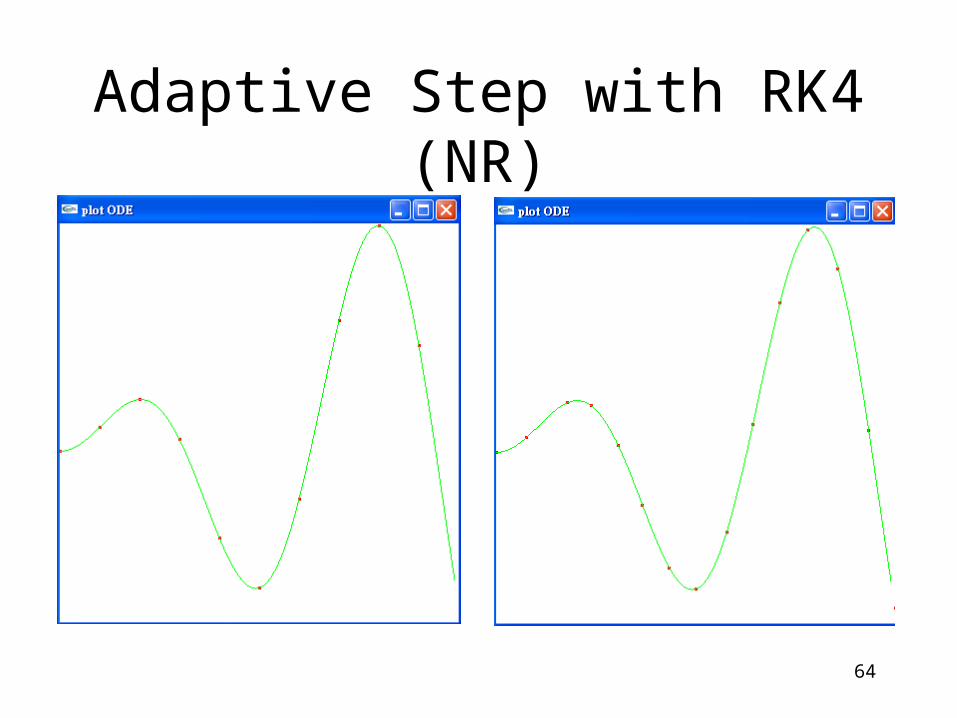
Adaptive Step with RK4 (NR)
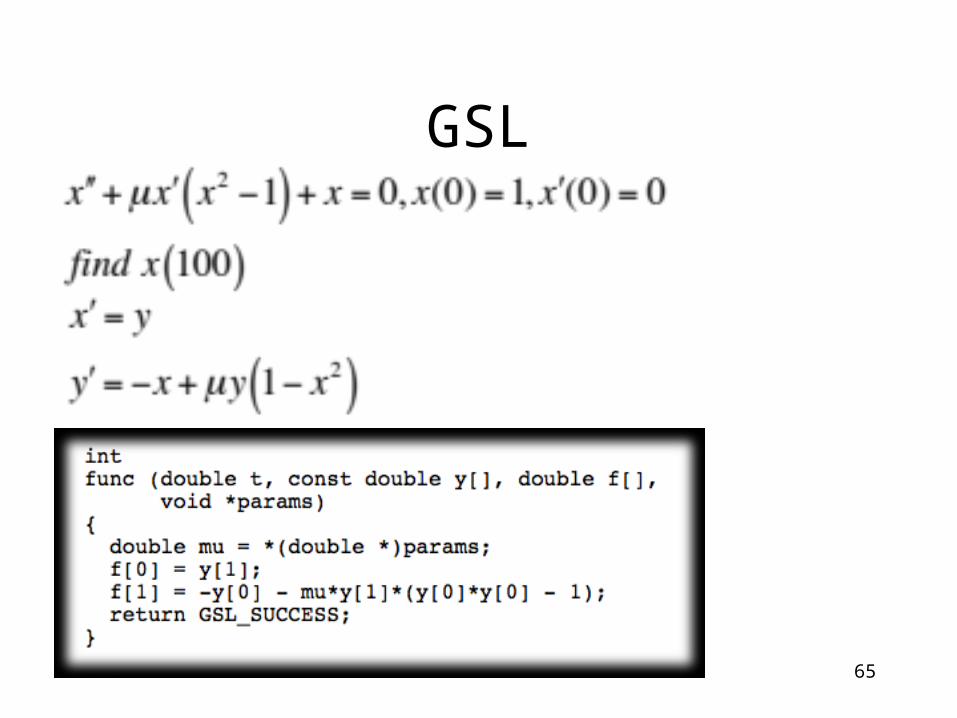
GSL
65
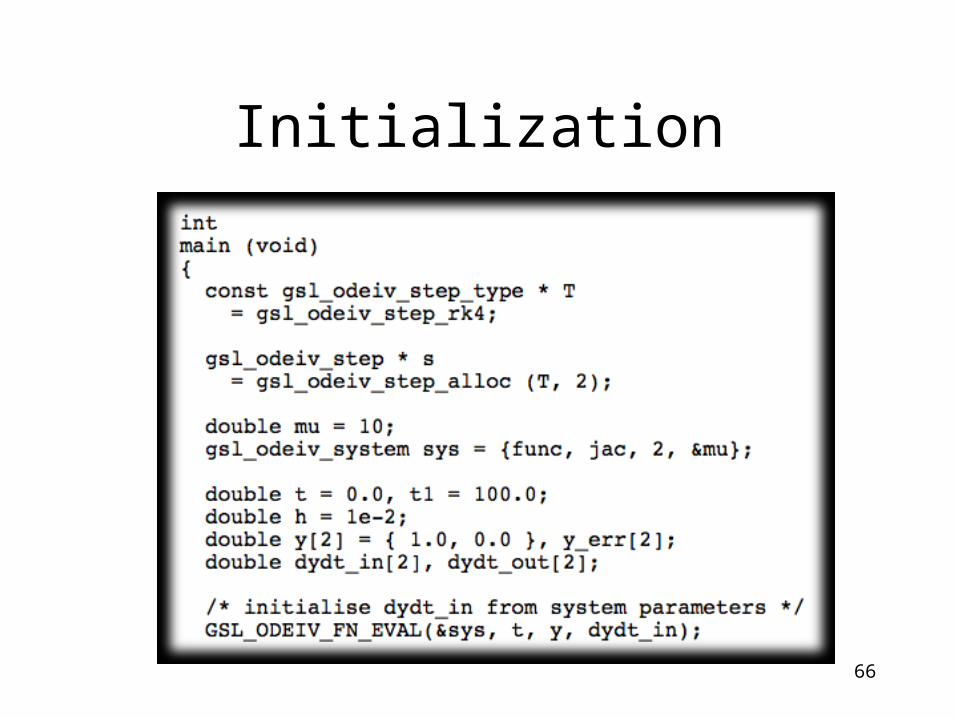
Initialization
66
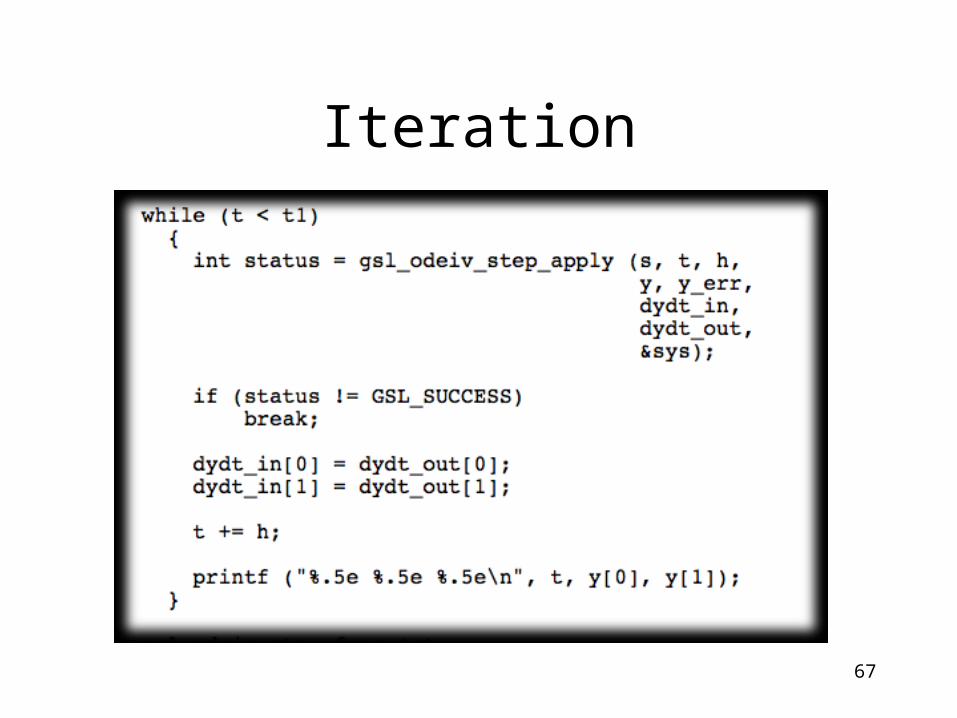
Iteration
67