1. - NTC - National Transport Commission7114C62D-15B5-4241-915A... · These forces are specified in...
98
Transcript of 1. - NTC - National Transport Commission7114C62D-15B5-4241-915A... · These forces are specified in...



I
1. Introduction RMIT University was engaged by the National Transport Commission (NTC) to:
Investigate the force applied to the load during a range of detailed scenarios of typical loadings, movements and maneuvers
Determine the forces required to adequately restrain the load under each scenario
Conduct a sensitivity analysis of mitigating or exacerbating factors for each scenario
Recommend suitable performance expectations for commonly-used, unrated load restraint equipment
Propose a method to reasonably determine the effects of wear for rated and unrated load restraint equipment, including maximum acceptable levels of wear.
The key element of the report consists of the review of the forces likely to be experienced by a load
on a vehicle in the forward, rearward, sideways and upwards under normal driving conditions.
These forces are specified in the 2004 edition of the Load Restraint Guide published by the NTC and
represent the load restraint performance standards that a load must comply with in order to prevent
unacceptable movement during all expected conditions of operation.
Through a detailed mathematical dynamics modelling RMIT found that the interface between the
road and tyres (friction) is the main characteristic that determines the ability of a vehicle to
accelerate/decelerate.
RMIT also found that the upwards force is the greatest at relatively low speeds (range between 5 to
40 k/h).
The findings were extracted by applying maximum values of acceleration applied to the load in any
direction (different scenarios). These values were used to suggest a suitable working range for
performance expectations of load restraint equipment.
The present report is divided in to different sections as following:
Directional accelerations applied to the load
Required forces for safely restraining loads
Conditions likely to affect better or worse of the safe carriage of loads
Suitable performance expectations for load restraint equipment

II
Table of Contents 1. Introduction ..................................................................................................................................... I
2. Directional Acceleration Applied to the Load ................................................................................. 1
2.1. Emergency Breaking ............................................................................................................... 2
2.1.1. Dynamics of a decelerating Vehicle ................................................................................ 2
2.1.2. Forces Exerted on Load Carried On a Braking Vehicle .................................................... 2
2.2. Hard Acceleration ................................................................................................................... 5
2.2.1. Power-limited Acceleration ............................................................................................ 5
2.2.2. Low Velocity Acceleration ............................................................................................... 6
2.2.3. Maximum rearward braking deceleration ...................................................................... 8
2.3. Cornering............................................................................................................................... 10
2.3.1. Dynamics of a Turning Vehicle ...................................................................................... 10
2.3.2. Practical Maximum Lateral Acceleration ...................................................................... 11
2.3.3. Planar Non-Linear Model .............................................................................................. 12
2.4. Jack-knifing ............................................................................................................................ 16
2.5. Travelling Over Bumps .......................................................................................................... 17
2.6. Minor Collision ...................................................................................................................... 22
2.6.1. Dynamics of Vehicle Collisions ...................................................................................... 22
2.6.2. Special Cases ................................................................................................................. 23
2.7. Velocity by which the average acceleration of 0.8g is resulted (Critical Velocity) ........... 25
3. Forces Required to Restrain Loads ............................................................................................... 27
3.1. Tie-Down Lashing .................................................................................................................. 27
3.1.1. Symmetric Tensioning Forces ....................................................................................... 27
3.1.2. Asymmetric Tensioning Forces ..................................................................................... 28
3.2. Suggested Safety Factor for Lashing Equipment .................................................................. 29
3.3. Direct Lashing ........................................................................................................................ 31
4. Conditions Likely to Effect Better or Worse of the Safe Carriage of Loads .................................. 34
4.1. Vehicle Parameters ............................................................................................................... 34
4.1.1. Braking .......................................................................................................................... 34
4.1.2. Effect of Longitudinal Position of the COG ................................................................... 34
4.1.3. Effects of the Height of COG ......................................................................................... 35
4.1.4. Effect of Braking Distribution ........................................................................................ 37

III
4.2. Cornering............................................................................................................................... 37
4.3. Vertical Vibration .................................................................................................................. 39
5. Suitable Performance Expectations for Load Restraint Equipment ............................................. 41
5.1. Chain Assemblies Performance ............................................................................................ 41
5.2. Webbing Load Restraint Systems ......................................................................................... 41
5.3. Fibre Rope Load Restraint Systems ....................................................................................... 42
5.3.1. Polyamide rope made from filament fibre three-strand hawser-laid .......................... 42
5.3.2. Polyester rope made from filament fibre three-strand hawser-laid ............................ 43
5.3.3. Polyethylene rope made from staple fibre or film three-strand hawser-laid .............. 44
5.3.4. Polyethylene rope made from monofilament fibre three-strand hawser-laid ............. 45
5.3.5. Polyethylene rope made from film, monofilament, multifilament or staple fibre three-
strand hawser-laid ........................................................................................................................ 46
5.3.6. Vinylal rope made from staple fibre three-strand hawser-laid .................................... 47
5.3.7. Polyamide rope eight-strand plaited ............................................................................ 48
5.3.8. Polyester rope eight-strand plaited .............................................................................. 49
5.3.9. Polyethylene rope made from staple fibre or film eight-strand plaited....................... 49
5.3.10. Polyethylene rope made from film, monofilament, multifilament or staple fibre eight-
strand plaited ................................................................................................................................ 50
5.3.11. Steel wire rope load restraint systems ......................................................................... 50
5.3.12. Steel wire rope grade 1570, galvanised ........................................................................ 51
5.3.13. Steel wire rope grade 1770, galvanised or natural ....................................................... 52
6. Working Load Limits for Unrated Equipment Used for Load Restraining ..................................... 53
6.1. Chains .................................................................................................................................... 53
6.2. Manila Rope .......................................................................................................................... 53
6.3. Wide Rope (6x37, Fibre Core) ............................................................................................... 53
6.4. Steel Strapping ...................................................................................................................... 54
6.5. Synthetic Webbing ................................................................................................................ 54
6.6. Polypropylene Fibre Rope (3&8 Strand Construction) ......................................................... 54
6.7. Polyester Fibre Rope (3&8 Strand Construction) .................................................................. 55
6.8. Nylon Rope ............................................................................................................................ 55
6.9. Double Braided Nylon Rope .................................................................................................. 55
6.10. Headboard, side gate, and rear gate ................................................................................ 56
7. Effect of Wear on Road Restraint Equipment ............................................................................... 60
8. Appendix A .................................................................................................................................... 61

IV
8.1. Braking .................................................................................................................................. 61
8.1.1. Friction Coefficient ........................................................................................................ 62
8.2. Hard Acceleration ................................................................................................................. 62
8.2.1. Power limited acceleration ........................................................................................... 63
8.2.2. Transmission System ..................................................................................................... 64
8.3. Dynamics of a Turning Vehicle .............................................................................................. 66
8.4. Jack-Knifing ........................................................................................................................... 68
8.5. Travelling Over Bumps .......................................................................................................... 69
8.6. Minor Collision ...................................................................................................................... 70
8.7. Tie-Down Lashing .................................................................................................................. 72
8.7.1. Symmetry ...................................................................................................................... 72
8.7.2. Asymmetry .................................................................................................................... 73
8.7.3. Safety Factor ................................................................................................................. 73
8.8. Direct Lashing ........................................................................................................................ 74
8.9. Conditions Likely to Effect Better or Worse of the Safe Carriage of Loads .......................... 74
8.10. Effect of Wear for Load Restraint Equipment ................................................................... 75
9. Appendix B .................................................................................................................................... 78
10. Appendix C ................................................................................................................................ 88
11. REFERENCES .............................................................................................................................. 92

1 of 88
2. Directional Acceleration Applied to the Load According to the load restraint performance standards a load that is restrained so it does not shift is
required to withstand forces of at least:
80% of its weight in the forward direction;
50% of its weight sideways and rearwards, and
And additional 20% of its weight vertically
In this section these values were recalculated by re-evaluating relevant assumptions considering the
advances in the vehicle systems such as braking or accelerating.
Different scenarios were used to study the maximum possible acceleration/deceleration applied to
loads. This resulted in the calculation of forces in different directions which has been used to
calculate the load restraining equipment requirements.
These scenarios include:
Emergency Breaking
Hard Acceleration
Cornering
Jack-Knifing
Traveling over Bumps
Minor Collisions
Figure 1 – Maximum allowed force applied to the load

2 of 88
2.1. Emergency Breaking
2.1.1. Dynamics of a decelerating Vehicle
Figure 2 illustrates the forces acting on a decelerating vehicle and its load. The governing equations
for this case are mentioned in the Equations 1-3.
a2r1r2b1bx F)FF(sinmgFFma (1)
cosmgFF 2z1z
(2)
cosmgahmasinhmghFLF 2xa1z (3)
Solving these equations prove that in an emergency braking condition, the braking forces are much
greater than rolling resistance force and aerodynamic force. Therefore, these smaller forces can be
neglected in the calculations. The maximum braking force can be determined by the normal load
and the coefficient of road adhesion.
Note: Maximum deceleration can be achieved by a vehicle only if all the tires reach their maximum braking
capacity forces at the same time.
To achieve optimum utilization of the potential braking capacity of the vehicle, the distribution of
the braking forces between the front and rear axles must be exactly the same proportions as that of
normal loads on the front and rear axles (ideal braking forces distribution). As a result for a particular
vehicle with a constant static load, the ideal braking distribution only depends on the road
characteristics (friction coefficient and gradient).
Note: For a given road, a vehicle can reach its breaking capacity only if it has the braking force distributed
evenly about its centre of gravity.
2.1.2. Forces Exerted on Load Carried On a Braking Vehicle
Figure 2 illustrates the forces applied to the load carried by a vehicle as a result of deceleration of
the vehicle
Figure 2 - Braking force exerted on load
The maximum longitudinal force exerted on the load due to braking is applied to the load when
deceleration happens on a level road.
max
mgsinφ
Ff N
C
φ

3 of 88
Longitudinal slip
Bra
kin
g fo
rce
Sliding
value μsW
Peak value μpW
Equation 4 shows the relationship for the calculating the maximum acceleration applied to the load.
As it can be seen the acceleration is only and directly dependant to the weight of the load and truck
and the friction coefficient between the tire and surface of the road.
mgF xmaxb (4)
2.1.2.1. Friction Coefficient
Friction coefficient is a function of the tire longitudinal slip, as shown in Figure 3 (Wong, 2001)
Figure 3 - Braking force – slip curve
It is also dependent on vehicle velocity, vertical load, tire inflation pressure etc. The average peak
and sliding values of the coefficient of road adhesion are given in Tables 1 and 2.
Table 1 Average Values of Coefficient of Road Adhesion (Wong, 2001)
Surface Peak Value μp Sliding value μs
Asphalt and concrete (dry) 0.8 – 0.9 0.75
Asphalt (wet) 0.5 – 0.7 0.45 – 0.6
Concrete (wet) 0.8 0.7
Gravel 0.6 0.55
Earth road (dry) 0.68 0.65
Earth road (wet) 0.55 0.4-0.5
Snow (hard-packed) 0.2 0.15
Ice 0.1 0.07

4 of 88
Table 2 Values of Coefficient of Road Adhesion for Truck Tires on Concrete Pavement at 64
km/h (40 mph) (Wong, 2001)
Tyre type Tyre construction
Dry Wet
μp μs μp μs
Goodyear Super Hi Miler (rib) Bias-ply 0.850 0.596 0.673 0.458
General GTX (rib) Bias-ply 0.826 0.517 0.745 0.530
Firestone Transteel (rib) Radial-ply 0.809 0.536 0.655 0.477
Firestone Transport 1 (rib) Bias-ply 0.804 0.557 0.825 0.579
Goodyear Unisteel R-1 (rib) Radial-ply 0.802 0.506 0.700 0.445
Firestone Transteel Traction (lug) Radial-ply 0.800 0.545 0.600 0.476
Goodyear Unisteel L-1 (lug) Radial-ply 0.768 0.555 0.566 0.427
Michelin XZA (rib) Radial-ply 0.768 0.524 0.573 0.443
Firestone Transport 200 (lug) Bias-ply 0.748 0.538 0.625 0.476
Uniroyal Fleet Master Super Lug Bias-ply 0.739 0.553 0.513 0.376
Goodyear Custom Cross Rib Bias-ply 0.716 0.546 0.600 0.455
Michelin XZZ (rib) Radial-ply 0.715 0.508 0.614 0.459
Average 0.756 0.540 0.641 0.467
In a recent PhD study supervised by Professor Reza Jazar (RMIT University), the experimental data
show that the maximum friction coefficient that can be reached by light vehicles is 0.96. The
experiment was conducted in Australia, Victoria, for the Victorian police force. (Hartman, 2014)
The maximum value 0.96 is for various weather and road surface conditions and light vehicles with
enhanced braking performance.
In the case of heavy trucks the highest value for friction coefficient found in the literature is slightly
lower than 0.8. This can be justified by considering the materials used for different types of tires.
The softer the rubber material used for making a tire is the higher friction coefficient between its
surface and the surface of the road and lower life expectancy will be. The softest types of tires are
used for Formula 1 cars which can be used only so a limited number of labs. The tires made for
heavy trucks usually have a minimum life expectancy of around 80000 kilometres which is at least
two times of the life of the tires for passenger vehicles such as Holden Commodore used for the
above mentioned experiments.
In British and New Zealand standards the value for friction coefficient equal to 1 has been used. The
investigating team believes that 0.8 is sufficient for providing safe carriage of loads but for the
purpose of a sensitivity analysis the requirements for the restraining equipment to maintain the
loads safely have been calculate for both 0.8g and 1g forward acceleration. These results are
available in the appendix B for 0.8g and appendix C for 1g.
It has been proven that the maximum acceleration applied to the load in a decelerating
scenario is directly dependant to the friction coefficient between the tire and the surface of
the road which will result in the following relation:
Maximum Forward acceleration applied to the load on a decelerating heavy vehicle:
0.8g

5 of 88
2.2. Hard Acceleration Assuming that there is adequate power from the engine, acceleration may be limited by the friction
between tire and road. The dynamics of an accelerating vehicle is presented here is similar to that of
braking.
Figure 4 - Dynamics model of an accelerating vehicle
Figure 4 and Equations 5-7 show the forces acting on an accelerating vehicle and its governing
equations.
a2r1rx2t1t F)FF(sinmgmaFF (5)
cosmgFF 2z1z (6)
cosmgasinhmghmahFLF 2xaa1z (7)
Note: Maximum acceleration of a vehicle can happen only when all the tires reach their maximum traction at
the same time.
Theoretically, the traction-limited acceleration is similar to that of the braking. However, the
practical maximum forward acceleration, especially for heavy vehicles, mainly depends on engine
power and transmission system. Otherwise the equation looks very similar and depends on the same
factors as before. The difference is that for braking every vehicle has to reach a minimum stopping
force in order to stop but for accelerating the engine plays an important role. In other words in
almost every vehicle (excluding the super-fast cars which are powered by stronger than required
engines and are lighter than normal cars) reaching to a level that the maximum static friction
coefficient is exceeded is highly dependent to the engine power.
2.2.1. Power-limited Acceleration
The ratio of engine power to vehicle weight is the first-order determinant of maximum acceleration.
At low speeds, the maximum acceleration can be obtained by neglecting all resistance forces acting
on the vehicle.
mg
ha
Fz1
Ft2
Ft1
Fr1
Fr1
max
Fa
h
a1
L a2
Fz2

6 of 88
Figure 5 - Acceleration vs vehicle speed
If we assume that maximum engine power is available at the time of maximum acceleration the
Equation 8 shows how acceleration, engine power and forward velocity are related and what are the
other factors involved. Figure 5 shows the relation between forward velocity and acceleration for
passenger cars as well as heavy trucks.
x
Mx
vm
Pa
1max (8)
where is the efficiency of the vehicle and has been explained in more details in the Appendix
section.
To clarify the situation here a sample nominal set of values for heavy truck has been used with a
rarely very high power to weight ratio of 54.22 W/kg for truck (Ahanotu, 1999), and a high efficiency
of 0.9, and the resulted Equation 8 will become:
xx
maxxv
8.48
v
1 x 22.54 x 9.0a (9)
If the vehicle is traveling with vx > 10 m/s (36 km/h), the maximum acceleration will be:
0.5g ][m/s 88.410
8.48a 2
maxx (10)
Therefore, a maximum forward acceleration that is higher than 0.5g may only occur at velocity less
than 10 m/s. This concept is explored further in this document.
2.2.2. Low Velocity Acceleration
Low-speed acceleration also called start-up acceleration, which is the ability of a vehicle to
accelerate from a full stop to clear a specified hazard zone such as an intersection. This manoeuvre
usually comes with the assumption that the vehicle does not shift gears (Harwood et al., 2003).
When the vehicle is accelerating from rest, its clutch is slipping. As a result, the torque and power

7 of 88
are less than normal driving conditions. Therefore, Equation (8) and items mentioned in the
appendix about efficiency are not applicable to determine the low-speed acceleration.
Low-speed accelerating is usually modelled based on the observational data. Many researches have shown that linearly-decreasing acceleration rates well represent both maximum vehicle acceleration capabilities as well as actual motorist behaviour (Long, 2000). Utilizing the model, the acceleration of the vehicle is a function of vehicle speed v and the grade G:
Ggva x (11)
where, ax is the forward acceleration, α presents the maximum acceleration, which occurs at zero
speed, as it starts and β represents the slope of the line or the rate of decrease in acceleration as
speed, v, increases.
Researches have shown that, the maximum acceleration for heavy vehicles is far less than 0.5g (Long, 2000, Proctor et al., 1995). Table 3 and Figure 7 illustrate maximum acceleration at low speed for different vehicles.
Table 3 - Low-speed acceleration parameters
Description Type α (m/s2) β (1/s) Information Source
Derived from Vehicle Performance Tests
P @ 25 lb/hp Veh.Max 2.94 0.0503 TE Handbook, 1992
P @ 30 lb/hp Veh.Max 2.49 0.0452 TE Handbook, 1992
P @ 35 lb/hp Veh.Max 2.16 0.0409 TE Handbook, 1992
WB-15 @ 100 lb/hp Veh.Max 0.89 0.0286 TE Handbook, 1992
WB-15 @ 200 lb/hp Veh.Max 0.58 0.0199 TE Handbook, 1992
WB-15 @ 300 lb/hp Veh.Max 0.48 0.0180 TE Handbook, 1992
WB-15 @ 400 lb/hp Veh.Max 0.45 0.0200 TE Handbook, 1992
70 Chevrolet ¾-ton truck Veh.Max 5.19 0.1478 NCHRP 185, 1978
75-95 RVs Veh.Max 2.5 0.104 Glauz, 1981
P @ 40 lb/hp Veh.Max 2.85 0.0853 Glauz, 1981
Based on what is mentioned above it is evident that even during start-up motion of the car which is considered as low-velocity accelerating the maximum acceleration of the vehicle cannot and will not exceed 0.5g m/s2 acceleration in the forward direction. This proves that the maximum acceleration applied to the load in the opposite direction of the motion of the vehicle cannot exceed the value already mentioned in the standard.
Figure 6 - Braking force exerted on load
maxmax
mgsinφ
Ff N
C
φ

8 of 88
Figure 7 - Acceleration vs. vehicle speed
Figure 6 illustrates the forces applied to the load during a forward acceleration manoeuvre.
2.2.3. Maximum rearward braking deceleration
The ratio between the front braking force and the rear one is usually designed in a way that the
braking vehicle (in forward direction) can utilise much of the available tyre-road friction such as
illustrated in Figure 3.1. When the vehicle is braking, the normal force at front wheels increases
while that of rear wheels decreases. Therefore, the brake system is usually designed to provide more
braking force to the front wheels rather than at the rear.
When the vehicle is travelling rearwards and braking, the braking forces generated at the front and
rear wheels are reverse to what is expected in forward braking. This means that, the front wheels
will lock well before the rear wheel reaches it braking force capacity leading to a lower maximum
deceleration.
The following graph show the maximum braking capacity (in proportion of “g”) in rearward
direction. The graphs are produced by running the simulation with a braking force distribution
inverse of what used for the forward braking: : crwd = 1/cfwd= 1/c

9 of 88
Figure 8 – Maximum rearward deceleration vs. friction coefficient
The blue-dash line disappears as the μ0 value is calculated to be negative (-0.714) which means that
the front wheels always lock when rearward braking have not reached its capacity, for any tyre-road
friction coefficient (from 0 to 1).
As can be seen from the graph, the maximum rearward deceleration on the road of μ = 0.8 is about
0.48g which is far less than that of forward direction. Running the simulation with different truck
specifications convince that the maximum rearward deceleration is 0.5g.
It has been proven that the maximum acceleration applied to the load in an accelerating and
reverse braking scenarios is directly dependant to the friction coefficient between the tire and
the surface of the road as well as the engine power and vehicle efficiency which will result in the
following relation:
Maximum Rearwards acceleration applied to the load on an accelerating heavy vehicle:
0.5g

10 of 88
2.3. Cornering
2.3.1. Dynamics of a Turning Vehicle
Figure 9 - Dynamic model of a turning vehicle
A simple model illustrated in Figure 8 can be used to provide a basic understanding of maximum
lateral acceleration that a vehicle can attain. When a vehicle is subjected to a centrifugal force Fc
acting at its centre of gravity, lateral forces Fyl and Fyr arise at left and right tires.
The planar static equilibrium in lateral direction provides:
yrylc FFF (12)
If we assume that, the lateral tire forces reach their maximum capacities at the same time, the
associated centrifugal force will be at its maximum and the maximum lateral acceleration will be:
ga ymaxy (13)
where, μ is the lateral friction coefficient between road and tyre.
If μy = 0.8 is considered, the maximum lateral acceleration that a road vehicle can reach we’ll have:
g8.0a maxy (14)
This is an explicit value of lateral acceleration capacity of a vehicle expressed as a fraction of the
acceleration due to gravity. It is independent of vehicle parameters. Therefore, it can be applied to
any ground vehicle having the same tire-road friction characteristics. This limit, however, does not
reflect the lateral capacity of a real vehicle.
G
Fc
Fyr Fyl
W Fr Fl

11 of 88
2.3.2. Practical Maximum Lateral Acceleration
In reality, the maximum lateral acceleration is much smaller than the value determined by Equation
(14) owing to the non-linear characteristics of the rubber tires, load transfer and other effects.
The lateral force of a tire is a function of side slip angle, normal load, etc. As illustrated in Figure 9,
the lateral force changes with the side slip angle, which reaches a maximum value at a certain angle,
beyond which the force levels off or reduces while much of the adhesion friction in the contact patch
is not utilized.
Figure 10 - Lateral force as a function of side slip angle
The lateral force also increases with the normal load under the tire in terms of a saturating curve, as
shown in Figure 10. Therefore, when the vehicle is cornering, the total lateral forces reduces as there
is a normal load transfer between the left and the right wheels, as depicted in Figure 11. These
effects, limit the cornering capacity of the vehicle as the outer tire has not been exploited to its
lateral capacity when the lateral force of the inner wheel is saturated and starts to skid off, which is
a major concern in vehicle handling safety.
Figure 11 – Load Saturation curve

12 of 88
Figure 12 - Lateral force reduction
Taking these effects into account, the real maximum lateral acceleration of a vehicle, therefore, less
than that determined in Equation (14).
2.3.3. Planar Non-Linear Model
The relationship between the lateral capacity and vehicle parameters is implicit. Hence, to
determine the lateral acceleration limit for a particular vehicle, programming on a computer is most
often the preferred method.
A planar model of a rear-wheel-drive single unit vehicle, illustrated in Figure 13, is usually utilized to
investigate the lateral dynamics.
Figure 13 - Dynamic model of a turning vehicle
The Newton-Euler equations of motion for a rigid vehicle in the body coordinate frame B, which is
the frame attached to the vehicle at its centre of gravity C, are:
0 2 4 6 8 10 12 14 16 18 200
1000
2000
3000
4000
5000
6000
sideslip angle (deg)
Fy (
N)
Fz=2(KN)
Load shift: inner tire
Fz=6(KN)
Load shift: outer tire
Fz=4(KN)
No load shift
Increase
Decrease
0 1 2 3 4 5 6 70
500
1000
1500
2000
2500
Fz (KN)
Fy (
N)
FzoFzi
reduction
Fy1 Fy2
Fy3 Fy4
Fx4 Fx3
Mz1 Mz2
Mz3 Mz4
y
x
C
B
w

13 of 88
yxx mrvvmF (15)
xyy mrvvmF (16)
zz IrM (17)
where, vx, vy, are longitudinal, lateral velocity of the vehicle centre expressed in the body coordinate
frame, r is the yaw rate of the vehicle, m presents the weight of the vehicle, Iz is the rotational inertia
of the vehicle about Cz
A force system will be acting on the vehicle which is explained in more details in the appendix
section. The equation of motion resulted from this force system have been solved using a Simulink
model (schematic view available in the appendix section) and the following are the results.
Figures 14-17 shows normal forces, lateral forces, saturated lateral forces under the tires of a typical
truck, and the lateral acceleration of the vehicle during the manoeuvre.
Figure 14 - Normal forces under the vehicle tires
Figure 15 - Lateral forces under the vehicle tires

14 of 88
Figure 16 - Lateral forces, and their saturated values under the tires
Figure 17 - Lateral acceleration of the vehicle

15 of 88
The previous statements show that there is a significant amount of normal load shift between the
left and the right wheels, making the vertical force in the outer wheel three times larger than that of
the inner wheel. As lateral force of a tire with lighter normal load is saturated at lower side slip
angles than that of the heavier normal load, the inner tires will reach their lateral capacity before
this happens to the outer tires. This is illustrated in Figure 13 where the lateral force of the left front
wheel is saturated (Fy1 = Fy1.sat) while that of the right front wheel is far less than its saturation level
(Fy2 < Fy2.sat). The same scenario also happens for the rear wheels. Therefore, the outer tires can only
reach the lateral forces that are far less than their capacity to avoid skidding of the inner wheels
which is a major concern in vehicle handling safety. As a result, the lateral acceleration is limited to
3.7 m/s2 as shown in Figure 14, which is far less than that determined by Equation (14).
It has been proven that the maximum lateral acceleration applied to the load in a cornering
scenario does not follow the same values of forward and back friction coeffieciens as many other
factors as a result of non-linearities of the tire are involved
Maximum Lateral acceleration applied to the load on a cornering heavy vehicle:
0.5g

16 of 88
2.4. Jack-knifing Jack-knifing occurs for different reasons, for example if the rear wheels of the truck are blocked,
when the vehicle applies the brakes abruptly while cornering, or when the road has low adherence
(Bouteldja et al.). Therefore, the manoeuvre is modelled by different scenarios. By neglecting the
roll, pitch, and bounce motions, the model in Figure 18 can be used to describe the dynamics of jack-
knifing. The model includes a truck with two axles, and a semitrailer connected to the truck through
the fifth wheel.
Figure 18 - Dynamics of a tractor-semitrailer combination
Despite the fact that, the model has been simplified, the equations of motion(see Appendix for more
details) remain extremely lengthy and complex (Mikulcik, 1971). Moreover, the dynamic behaviour
of the articulated vehicle is affected by many different factors such as braking force, cornering force,
friction coefficient under each tire, etc. Considering the time restrictions, the complexity of the
dynamics and the variety of factors involved in the happening of jack-knifing, the general dynamics
of the truck-semitrailer combination has not been modelled.
During jack-knifing the dynamic friction coefficient cannot be used as a result of sliding of some of
the tires if not all. In order to consider some calculations using the static friction coefficients are
needed. This adds a lot of complications to the calculations which is why the dynamic behaviour of
the motion of trucks in the mentioned scenario has not been fully investigated by researchers
previously.
RMIT University believes that this will cause situations beyond the normal driving scenarios covered
by the performance standard and a full investigation that will take into account enough variables to
present a valid conclusion will require a much longer period.

17 of 88
2.5. Travelling Over Bumps The vibration of a vehicle can be modelled by a planar model, as shown in Figure 19. The body of the
vehicle is assumed to be a rigid bar. The bar has a sprung mass m, lateral mass moment Iy, the front
and rear unsprung masses m1 and m2. The stiffness of the tires is indicated by kt1 and kt2. The
damping of tires is much smaller than that of shock absorber so it is neglected. The model includes
the body bounce x, body pitch θ, wheels hop x1 and x2, and independent road excitation y1 and y2.
Figure 19 - Planar model of vehicle vibrations
The equations of motion can be written as:
Fx]k[x]c[x]m[ (18)
The model in this case has been solved for a normal bump input which is usually a sine wave such as
what is illustrated in figure 20.
Figure 20 - Sine bump input
By solving the equations of motion (Equation 18) considering the mentioned input one can fins the
amount of acceleration applied to the load at any moment of time. Considering the normal driving
conditions these equations have been solved base on a case scenarios during which the driver sees
the bump in the front in timely manner and reduces the speed to a maximum of 40 km/h before
hitting the bump. The results are illustrated in the figure 20 for a bump with popular 50 mm height
and for different velocities.
H x
y
S
H t
y
T

18 of 88
It should be noted the maximum acceleration value is calculated based on a maximum height of the
bump to be 100mm. If the height of the bump is more than 100mm then it is evident that the
vertical acceleration will exceed the 0.2g threshold and is not considered as normal driving condition
as a result.
Figure 21 - Body vertical acceleration at different speeds
Same has been done for a constant velocity of 20 km/h but for different lengths of the bumps which
can be seen in Figure 22.

19 of 88
Figure 22 - Body vertical acceleration for different bump lengths
As it can be seen in none of the mentioned cases the acceleration goes over 0.2g m/s2.
In order to study the situation farther the equations were re-arranged and solved again this time to
find out the sensitivity of the system to the changes of velocities. In other words it can be seen in
figures 23-27 that the maximum vertical acceleration applied to the load only exceeds the above
mentioned threshold when the length of the bump is more than 2000 mm which is very unlikely to
happen no matter what the velocity of the vehicle is.
Figure 23 -maximum vertical acceleration for different vehicle velocity (S = 700 mm)

20 of 88
Figure 24 - Maximum vertical acceleration for different vehicle velocity (S = 1000 mm)
Figure 25 - Maximum vertical acceleration for different vehicle velocity (S = 1500 mm)

21 of 88
Figure 26 - Maximum vertical acceleration for different vehicle velocity (S = 2000 mm)
Figure 27 -Maximum vertical acceleration for different vehicle velocity (S = 3000 mm)

22 of 88
2.6. Minor Collision
2.6.1. Dynamics of Vehicle Collisions
The majority of vehicle collisions in reality involve frontal impact. It is also the most important type
of impact test. Therefore, in this section, the dynamics of frontal collisions is considered. The model
is shown in Figure 28.
Figure 28 - Dynamics model of vehicle collision
Consider vehicle A, and vehicle B with their masses M, and m, respectively. V, v are the velocities of
the vehicles at any time during the impact. Subscript 1 stands for all conditions at the moment of
first contact; and 2 is for conditions at the moment when contact is lost. During the impact, there is
a force P, and a linear impulse t
1t
PdtI act between the vehicles up to any time t.
The momentum equations are used. See more details in the appendix section.
If p denotes the summation of v and V (p = v + V), the new parameter will change in the manner
shown in Figure 29.
Figure 29 - p changes with time
In the first phase during the (t1 – t0) period of time, the compression and distortion occur and that is
when p decreases to zero and the two vehicle are moving together. In the second phase, a portion of
elastic strain energy in the vehicles structures is restored, and the vehicles finally separate with a
negative relative velocity p2.
The maximum vertical acceleration applied to the load on a vehicle which is traveling
over a bump can exceed the value below only if the length of the bump is over
2000mm or if the height is over 100mm which are not considered as a normal driving
condition.
Maximum Vertical acceleration applied to the load on a heavy vehicle travelling over
a bump in normal driving conditions:
0.2g
V v I I M m A
B
p
p1
p2
t1 t0 t2 t

23 of 88
Using the Newton’s law of restitution and using the Coefficient of restitution (e) the following can be
used:
12 epp (19)
The Newton’s law Equation (19), coupled with the momentum equations (available in the appendix)
are sufficient to determine the final velocities of the two vehicle after the collision. The whole
problem will end to be a system of three equations. Solving these simultaneously will yield the
following for the relative velocity of the two vehicles involved in the collision after during the second
phase:
)vV)(e1(
1m
M
1VVV 1121
(20)
2.6.2. Special Cases
In this section some scenarios have been studied which might include special situations. It has been
tried to highlight most of the happenings during a collision in this section.
1. Vehicle A with Mass M travelling at 30km/h collides with vehicle B with m traveling at the same
velocity
The relative velocity after the collision can be calculated using Equation (20). As the real impact
practically lasts for about 1/10 second (Macmillan, 1983), in this estimation we assume that Δt =
t2 – t1 = 0.1 (s). Therefore, the average deceleration that the vehicle B experiences is:
)1(
1
7.166. e
M
mt
va crashx
(21)
The average deceleration rate of the vehicle B is illustrated in Figure 26 with the minimum value
of 15.15 m/s2 associated with e = 0 (totally inelastic) and m/M = 10;

24 of 88
Figure 30 - Average deceleration of the vehicle for wide ranges of e and m/M
As it can be seen from the figure Deceleration starts at a very large value and gets bigger as the
weights of the two Vehicles get closer to each other.
2. Vehicle B with mass m travelling at 30 Km/h and collides with a fixed block
Again using the same steps as before the relative velocity is found using Equation (20). It should
be noted that in this case the weight of a second vehicle which is considered to a block would be
infinity and its velocity zero.
Therefore the average velocity is:
)(m/s 3.833.83)e1(t
va 2
crash.x
(22)
Figure 31 illustrates the average deceleration for different vehicle velocities.

25 of 88
Figure 31 - Average deceleration of the vehicle for different vehicle speeds
It can be clearly seen from the graph, that the average deceleration is very high during these
scenarios, even when the vehicle is travelling at 1 m/s speed (aave > g).
In reality, the deceleration is not constant. As a result, the maximum deceleration must be much
greater than what is defined above. Therefore, the collision scenario should not be considered to
be a normal driving condition when it comes to the load restraint system calculation. To study
the matter farther in the next session it has been tried to find out at what vehicle velocities the
acceleration applied to the load and vehicle will exceed the threshold value determined earlier
in this study for the forward direction.
2.7. Velocity by which the average acceleration of 0.8g is resulted (Critical Velocity)
In this section the problem has been solved again for both of the above cases but this time the focus
will be on the velocity by which the deceleration exceeds the 0.8g threshold determined earlier in
this study. We call this the Critical Velocity. The solutions and more details can be found in the
appendixes. Figure 32 illustrates the result for the critical velocity for a truck colliding with another
vehicle with different masses. The heavier the other vehicle the bigger is the deceleration value. It is
interesting to see that with velocities slightly more than 1m/s the 0.8g threshold is exceeded not
matter how heavy the other vehicle is.

26 of 88
Figure 32 - Velocity at which the 0.8g deceleration occurs for wide ranges of e and m/M
Graph 33 is illustrating the case during which a truck hits a fixed block. The critical velocity changes
with respect to the materials of the vehicle and the block which determine the coefficient of
restitution. But the situation is not any better and the same is resulted here too. All the above
mentioned proves that the front collisions cannot be considered as a normal driving condition. The
deceleration is so high during this case that restraining the load can hardly be achieved by the values
mentioned and used for the present standards.
Figure 33 - Velocity at which the 0.8g deceleration occurs for different e

27 of 88
3. Forces Required to Restrain Loads
3.1. Tie-Down Lashing The main reason to vertically restraint a load on a vehicle, shown in Figure 34, is to produce friction
force Ff countering the inertial force k.W which acts at the centre of gravity of the load. The friction
force results from W and restraint system clamping force Fc; where, W presents weight of the cargo,
k is the coefficient of acceleration (0.8 forward, 0.5 rearward, and 0.5 sideward), Fc is the
clamping force produced by the restraint equipment
Figure 34 - Restraint force
Equations and lashing requirements are available in the appendixes. The lashing requirement has
been recalculated and illustrated again based on the findings of this study, in more details.
3.1.1. Symmetric Tensioning Forces
Figure 35 - Tensioning force needed to safely restraint load
The tension force required and the maximum weight each lashing can carry is calculated for both
sliding balance and tipping balance cases.
NOTE: In cases that the friction coefficient between load and the loaded surface of the truck is bigger than
acceleration coefficient the lashing must be pre-tensioned to provide a minimum clamping force equal to 20%
of the weight of the load.
W
k.W
Fc
Ff
h
b
h
b
k.W
W

28 of 88
This is because the load must always remain in contact with the deck even if road vibration and over
travelling bumps forces are applied in order to maintain the friction force during normal driving
conditions.
3.1.2. Asymmetric Tensioning Forces
Unexpected forces that are applied to the load during travelling are inevitable. These scenarios can
be studied by taking an asymmetric lashing arrangement in to consideration.
Figure 36 illustrates a situation in which the lashing can be deflected by changing the angle α. The
tensioning force is reduced by the value c = e-μ’α, where μ’ is the friction coefficient between the
cargo and the lashing belt according to Eytelwein's formula. Moreover, the asymmetry also creates
horizontal force, as shown in Figure 37.
Figure 36 - Asymmetric restraint forces
Figure 37 - Clamping force needed to safely restraint load
h
b
k.
W
W

29 of 88
The tensioning force needed, during the worst case scenarios, to safely restraint load on the vehicle
are calculated for sliding and tipping balance cases and are available in the appendixes.
NOTE: In every mentioned case above the maximum lashing force required is highly and directly dependant to
the direction of motion and the friction coefficient of the loaded surface of the truck. As a result the use of
coarse material for the bottom section of the truck which in contact with the bottom of the load is
recommended.
3.2. Suggested Safety Factor for Lashing Equipment In another attempt for more safely carrying of the load it is important that a safety factor is used and
multiplied to the required lashing force before the number of lashings is determined and the tables
for this value are used from the standard.
The suggested safety factor against the lashing angle is illustrated by Figures 38 and 39 for different
friction coefficient values.
Figure 38 - Lashing safety factor for μ = 0.8, and different μ’

30 of 88
Figure 39 - Lashing safety factor for μ’ = 0.2, and different μ
It can be clearly seen in the graphs that the lashing factor decreases with the increase of μ, and it
increase with the increase of μ’. Considering the practical values of μ and μ’, a minimum value of 2
for the safety factor is suggested. This has been effective in the tables regarding the required
number of lashing in the appendix section.
The tables used in the 2004 edition of the Load Restraint Guide include a safety
factor of 2 in their calculations

31 of 88
3.3. Direct Lashing
Figure 40 - Direct Lashing
If the load is attached to the vehicle structure by direct lashings, the horizontal components of
tensioning forces are utilised to balance the inertia force. The minimum strength required for each
of n lashings directly restraining is:
kWcosnF minT (23)
or
cos
k
n
WF minT (24)
where, k is the coefficient of acceleration (0.8 forward, 0.5 rearward, and 0.5 sideward), n presents
the number of lashing , W is the weight of the load, α is the angle of the lashing with respect to the
direction of acceleration.
If two lashings (n = 2) are utilised to restrain the load W, the minimum strengths required for each of
the two lashings to restrain the load for different k (0,5; 0,8; 1.0) are illustrated in Figures 41-43.
Figure 41 - Minimum capacity for each of two lashings to retrain load for 1g acceleration
α
k.W
FTmin

32 of 88
Figure 42 - Minimum capacity for each of two lashings to retrain load for 0.8g acceleration
Figure 43 - Minimum capacity for each of two lashings to retrain load for 0.5g acceleration
Figures 44 shows the minimum strength (lashing capacity) required for only one lashing to restrain
100 kg load with k = 0.8, and k = 0.5.

33 of 88
Figure 44 - Minimum lashing capacity for one lashing (only) to retrain 100 kg of load
FTmin is directly proportional to load weight W, and inversely proportional to the number of lashing.
The value of FTmin for different values of W and n can be easily calculated by hand based on the
graphs in Figure 44. Furthermore, the graphs provide information for a wide range of lashing angles.

34 of 88
4. Conditions Likely to Effect Better or Worse of the Safe Carriage of
Loads
4.1. Vehicle Parameters
4.1.1. Braking
In vehicles equipped with EBD/ABS systems, the maximum braking acceleration (deceleration) is μxg,
for a level road, as proved in Section 1. In this case, the available friction between tyres and road is
fully utilised. In vehicles without EBD, where the ratio of front braking force to rear braking force is
constant, the vehicles usually skid off when the available tyre-road friction is not utilised. Therefore,
the decelerations of these vehicles are usually less than those having EBD system.
4.1.2. Effect of Longitudinal Position of the COG
The effect of longitudinal position of the vehicle CoG is illustrated in Figure 45a and 45b. This effect
is derived from the above model by varying the COG distance from the front wheel of the vehicle
from 2 to 2.8 m for a light truck (Figure 45a), and from 4 to 8 m for a heavy rigid truck (Figure 45b).
Figure 45a - Effect of longitudinal position of the vehicle CoG (light truck)

35 of 88
Figure 45b - Effect of longitudinal position of the vehicle CoG (heavy truck)It can be clearly seen that,
when travelling on a low friction road, a vehicle with smaller a1 can utilise more of available friction
limit; if a1 increases, available friction capacity has not been utilised. By contrast, when travelling on
a high friction road, a vehicle with longer a1 (more load moved rearwards) can reach its braking
capacity.
4.1.3. Effects of the Height of COG
The effect of vertical position of the vehicle CoG is illustrated in Figure 46a and 46b. Here, this effect
is derived from the above model by varying COG height (h) from 0.8 to 1.6 m. for a light truck (Figure
46a), and from 2.5 to 3.5 m for a heavy rigid truck (Figure 46b).

36 of 88
Figure 46a - Effect of vertical position of the vehicle CoG (light truck)
Figure 46b - Effect of vertical position of the vehicle CoG (heavy truck truck)

37 of 88
As it is shown, when travelling on a low friction road, a vehicle with higher CoG can utilise more of
available friction limit. However, when the friction is high, a vehicle with lower CoG can reach its
braking capacity.
4.1.4. Effect of Braking Distribution
The effect of braking force distribution is illustrated in Figure 47. Here, this effect is derived from the
above model by varying c from 1.2 to 2.
Figure 47 - Effect of braking force distribution
Figure 47 shows that, when travelling on a low friction road, vehicle with a lower c (lower Fb1/Fb2)
can utilise more of the available friction limit. When the friction is high, a vehicle with higher c can
reach its braking capacity easier.
4.2. Cornering As mentioned in Section 1, the non-linear characteristics of the tyre and the load shift limit the
lateral force and hence lateral acceleration of the vehicle. The load shift is heavily influenced by the
vehicle CoG. If the load transfer between the inner and the outer wheels is large, the inner wheels
will be saturated at low side-slip angle (and lateral acceleration). Figures 48 and 49 show how the
vertical and longitudinal positions of the CoG affect the lateral capacity of the vehicle. The graphs
are extracted from the model built in the Section I by varying the height of CoG (h) and the distance
between the front axle and the CoG (a1), respectively.

38 of 88
Figure 48 - Effect of vertical position of the vehicle CoG on lateral acceleration
Figure 49 - Effect of longitudinal position of the vehicle CoG on lateral acceleration

39 of 88
It can be seen in Figure 48, the maximum lateral acceleration increases with the decrease of the
height of the CoG. This is because load transfer is proportional to the CoG height. The longitudinal
position of the CoG, however, has little effect on the sideward acceleration. This is due to the fact
that if the centre of gravity moves rearwards, the lateral force at font inner wheel is saturated first; if
it moves forwards, the lateral force at rear inner wheel is saturated first.
4.3. Vertical Vibration The effect of longitudinal position of the CoG on vertical acceleration is depicted in Figure 50, where
the a1 (distance between front axle and the CoG) is varied from 1.3m to 1.9m.

40 of 88
Figure 50 - Effect of longitudinal position of the vehicle CoG on vertical acceleration
As illustrated by the graphs, the CoG position applies some changes to the vertical acceleration but it
is not very important in this context as it is not exceeding the pre-determined acceleration values.

41 of 88
5. Suitable Performance Expectations for Load Restraint Equipment
All the restraint equipment must comply with relevant Australian standards. Therefore, the suitable
performance expectations for each should be the capacity, and requirements nominated in the
standard.
5.1. Chain Assemblies Performance
The performance expectations for chain assemblies must comply with AS/NZS 4344 (Motor vehicles-
Cargo restraint systems-Transport chain and components).
The minimum breaking strength and lashing capacity of the different chains are illustrated in Table 4.
Table 4 - Lashing capacity of chain
Nominal chain size
mm
Lashing capacity (LC)
kg
6 2300
7 2900
7.3 3000
8 3800
10 6000
13 9000
5.2. Webbing Load Restraint Systems
The performance expectations for chain must comply with AS/NZS 4380 (Motor vehicles-Cargo
restraint systems- Transport webbing and components).
The lashing capacities of the webbing restraint load system are illustrated in Table 5.
Table 5 - Lashing capacity of webbing trap and components
Description Lashing capacity (LC)
kg
25mm x 4m Ratchet Webbing Tie Down with hook each end 400
35mm x 6m Ratchet Webbing Tie Down with hook and keeper each end 1500
50mm x 9m Ratchet Webbing Tie Down with hook and each end 2500
75mm x 9m Ratchet Webbing Tie Down with hook and each end 5000
Clip on truck winch with reinforced legs
(complete with 50mm x 9m webbing strap with hook and keeper) 2500
Long handled pull down ratchet assembly to suit 50mm webbing 2500

42 of 88
5.3. Fibre Rope Load Restraint Systems
Tables 6 to 15 present the requirements for a wide range of rope as determined by AS 4142 (Fibre
ropes).
5.3.1. Polyamide rope made from filament fibre three-strand hawser-laid
Table 6- Requirements for polyamide rope made from filament fibre three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
4 161
6 375
8 673
10 1040
12 1498
14 2049
16 2650
18 3349
20 4149
22 4995
24 6014
28 7900
32 9990
36 12436
40 14985
48 20999
56 27982
64 35984
72 44954
80 54944
Note: The lashing capacity is 50% of the minimum breaking force.

43 of 88
5.3.2. Polyester rope made from filament fibre three-strand hawser-laid
Table 7- Requirements for polyester rope made from filament fibre three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
4 148
6 282
8 510
10 795
12 1137
14 1590
16 2029
18 2538
20 3175
22 3807
24 4567
28 6116
32 7849
36 9684
40 11978
48 16769
56 22375
64 28950
72 36035
80 44190
Note: The lashing capacity is 50% of the minimum breaking force.

44 of 88
5.3.3. Polyethylene rope made from staple fibre or film three-strand hawser-laid
Table8 - Requirements for polyethylene rope made from staple fibre or film three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
3 55
4 104
5 134
6 188
7 247
8 311
9 386
10 472
12 632
14 719
16 1060
18 1295
20 1580
22 1876
24 2197
28 2971
32 3884
36 4908
40 6065
48 8563
56 11672
64 15240
72 19317
80 23853
Note: The lashing capacity is 50% of the minimum breaking force.
45 of 88
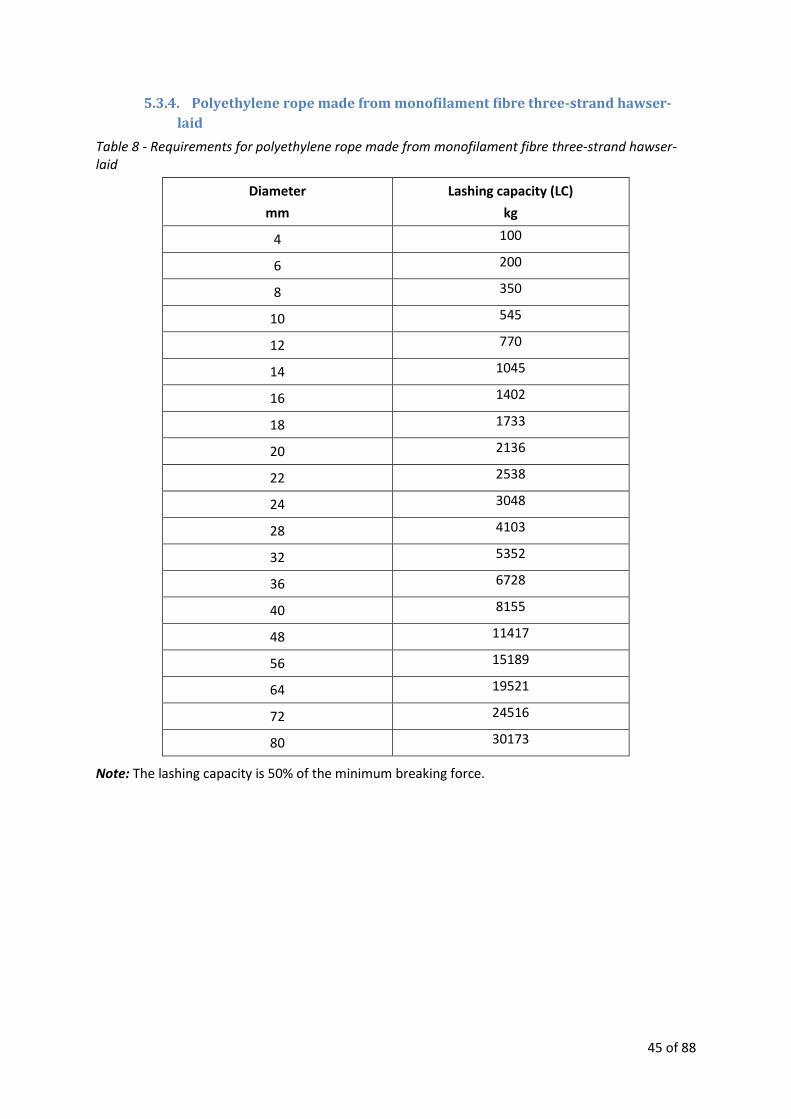
5.3.4. Polyethylene rope made from monofilament fibre three-strand hawser-
laid
Table 8 - Requirements for polyethylene rope made from monofilament fibre three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
4 100
6 200
8 350
10 545
12 770
14 1045
16 1402
18 1733
20 2136
22 2538
24 3048
28 4103
32 5352
36 6728
40 8155
48 11417
56 15189
64 19521
72 24516
80 30173
Note: The lashing capacity is 50% of the minimum breaking force.

46 of 88
5.3.5. Polyethylene rope made from film, monofilament, multifilament or staple
fibre three-strand hawser-laid
Table 9 - Requirements for polyethylene rope made from film, monofilament, multifilament or staple fibre three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
4 107
6 228
8 530
10 780
12 1106
14 1524
16 1886
18 2406
20 2900
22 3476
24 4062
28 5352
32 6728
36 8461
40 10245
48 14271
56 18909
64 24465
72 30734
80 37768
Note: The lashing capacity is 50% of the minimum breaking force.

47 of 88
5.3.6. Vinylal rope made from staple fibre three-strand hawser-laid
Table 10 - Requirements for vinylal rope made from staple fibre three-strand hawser-laid
Diameter
mm
Lashing capacity (LC)
kg
3 41
4 68
5 113
6 159
7 222
8 285
9 363
10 449
12 647
14 887
16 1162
18 1488
20 1814
22 2197
24 2604
Note: The lashing capacity is 50% of the minimum breaking force.

48 of 88
5.3.7. Polyamide rope eight-strand plaited
Table 11 - Requirements for polyamide rope eight-strand plaited
Diameter
mm
Lashing capacity (LC)
kg
16 2650
20 4149
24 6014
28 7900
32 9990
36 12436
40 14985
48 20999
56 27982
64 35984
72 44954
80 54944
Note: The lashing capacity is 50% of the minimum breaking force.

49 of 88
5.3.8. Polyester rope eight-strand plaited
Table 12 - Requirements for polyester rope eight-strand plaited
Diameter
mm
Lashing capacity (LC)
kg
16 2029
20 3175
24 4567
28 6116
32 7849
36 9684
40 11978
48 16769
56 22375
64 28950
72 36035
80 44190
Note: The lashing capacity is 50% of the minimum breaking force.
5.3.9. Polyethylene rope made from staple fibre or film eight-strand plaited
Table 13 - Requirements for polyethylene rope made from staple fibre or film eight-strand plaited
Diameter
mm
Lashing capacity (LC)
kg
16 1060
20 1580
24 2197
28 2971
32 3884
36 4908
40 6065
48 8563
56 11672
64 15240
72 19317
80 23853
Note: The lashing capacity is 50% of the minimum breaking force.

50 of 88
5.3.10. Polyethylene rope made from film, monofilament, multifilament or staple
fibre eight-strand plaited
Table 14 - Requirements for polyethylene rope made from film, monofilament, multifilament or staple fibre eight-strand plaited
Diameter
mm
Lashing capacity (LC)
kg
16 1886
20 2900
24 4062
28 5352
32 6728
36 8461
40 10245
48 14271
56 18909
64 24465
72 30734
80 37768
Note: The lashing capacity is 50% of the minimum breaking force.
5.3.11. Steel wire rope load restraint systems
The following tables 4.14 and 4.15 present the minimum breaking force for a wide range of rope as
determined by AS 3569 (Steel Wire Ropes). For the wire ropes with different sizes and materials, refer
to AS 3569.

51 of 88
5.3.12. Steel wire rope grade 1570, galvanised
Table 15 - Minimum breaking force: grade 1570, galvanised
Diameter
mm
Lashing capacity (LC)
kg
Fibre core IWR or IWS*
2 107 117
3 240 265
4 428 469
5 663 729
6 953 1050
7 1300 1437
8 1707 1835
9 2151 2329
10 2661 2864
11 3211 3476
12 3823 4128
13 4490 4852
14 5199 5607
16 6830 7339
18 8614 9327
20 10652 11468
22 12844 13914
24 15291 16514
26 17992 19419
28 20846 22528
32 27217 29409
Note: The lashing capacity is 50% of the minimum breaking force.
* IWS: Independent wire strand core
IWR: Independent wire rope core

52 of 88
5.3.13. Steel wire rope grade 1770, galvanised or natural
Table 16 - Minimum breaking force: grade 1770, galvanised or natural
Diameter
mm
Lashing capacity (LC)
kg
Fibre core IWR or IWS*
8 1896 -
9 2411 -
10 2977 -
11 3573 -
12 4286 -
13 5031 5454
14 5810 6320
16 7594 8308
18 9633 10499
20 11927 12946
22 14424 15647
24 17125 18654
26 20133 21865
28 23344 21865
32 30479 33129
Note: The lashing capacity is 50% of the minimum breaking force.
* IWS: Independent wire strand core
IWR: Independent wire rope core

53 of 88
6. Working Load Limits for Unrated Equipment Used for Load
Restraining
6.1. Chains
Size (mm) Grade 30 proof coil
Grade 43 High test
Grade 70 Transport Grade 80 Alloy
Grade 100 Alloy
7mm 580 kg 1180 kg 1430 kg 1570 kg 1950 kg
8mm 860 kg 1770 kg 2130 kg 2000 kg 2600 kg
10mm 1200 kg 2450 kg 2990 kg 3200 kg 4000 kg
11 mm 1680 kg 3270 kg 3970 kg - -
13mm 2030 kg 4170 kg 5130 kg 5440 kg 6800 kg
16mm 3130 kg 5910 kg 7170 kg 8200 kg 10300 kg
6.2. Manila Rope
Diameter Lashing Capacity
10 mm 90 kg
11 mm 120 kg
13 mm 150 kg
16 mm 210 kg
20 mm 290 kg
25 mm 480 kg
6.3. Wide Rope (6x37, Fibre Core)
Diameter Lashing Capacity
7 mm 640 kg
8 mm 950 kg
10 mm 1360 kg
11 mm 1860 kg
13 mm 2400 kg
16 mm 3770 kg
20 mm 4940 kg
22 mm 7300 kg
25 mm 9480 kg

54 of 88
6.4. Steel Strapping
WidthxThinckness Lashing Capacity
31.7x0.74 mm 90 kg
31.7x0.79 mm 120 kg
31.7x0.89 mm 150 kg
31.7x1.12 mm 210 kg
31.7x1.27 mm 290 kg
31.7x1.5 mm 480 kg
50.8x1.12 mm 1200 kg
50.8x1.27 mm 1200 kg
6.5. Synthetic Webbing
Width Lashing Capacity
45 mm 790 kg
50 mm 910 kg
75 mm 1360 kg
100 mm 1810 kg
6.6. Polypropylene Fibre Rope (3&8 Strand Construction)
Diameter Lashing Capacity
10 mm 180 kg
11 mm 240 kg
13 mm 280 kg
16 mm 420 kg
20 mm 580 kg
25 mm 950 kg

55 of 88
6.7. Polyester Fibre Rope (3&8 Strand Construction)
Diameter Lashing Capacity
10 mm 250 kg
11 mm 340 kg
13 mm 440 kg
16 mm 680 kg
20 mm 850 kg
25 mm 1500 kg
6.8. Nylon Rope
Diameter Lashing Capacity
10 mm 130 kg
11 mm 190 kg
13 mm 240 kg
16 mm 420 kg
20 mm 640 kg
25 mm 1140 kg
6.9. Double Braided Nylon Rope
Diameter Lashing Capacity
10 mm 150 kg
11 mm 230 kg
13 mm 300 kg
16 mm 510 kg
20 mm 830 kg
25 mm 1470 kg

56 of 88
6.10. Headboard, side gate, and rear gate As load shift can cause instability of the vehicle, all loads should be packed firmly and tightly in the
vehicle restraint structures “containing” the load. If the load does not fill all available space, then
restraint, blocking or filling the empty spaces is required and much recommended. Therefore, if the
load is solely restrained by headboard, side gate, and rear gate, the distance between them and the
load should be very small (if any) and is neglected, even though the load is assumed to move freely
along the deck.
The horizontal forces acting on gate/board is the subtraction of inertia force and the friction force
between the load and the deck:
mgkmgF (25)
where, k is the coefficient of acceleration (0.8/1 forward, 0.5 rearward, and 0.5 sideward)
The following graphs show how much force is exerted on the font/rear/side board (or gate) for
different load weight and friction coefficient between the load and the deck.
Figure 51 - Force exerted on headboard for forward inertia of mg
mamax = kmg
μmg
gate/board
load
F F

57 of 88
Figure 52 - Force exerted on headboard for forward inertia of 0.8mg
Figure 53 - Force exerted on side/rear gate (inertia of 0.5mg)
In the case where the friction contact between the load and the deck is broken (due to going over
bumps), μ is considered to be zero. The force will be:
kmgF (26)
Figures 54-56 illustrate the force determined by Equation (26).

58 of 88
This is considered as the worst case scenario, which is very probable to happen during normal
driving conditions and we recommend the values from the following graphs to be considered.
Figure 54 - Force exerted on headboard for forward inertia of mg with no friction
Figure 55 - Force exerted on headboard for forward inertia of 0.8mg with no friction

59 of 88
Figure 56 - Force exerted on side/rear gate (inertia of 0.5mg) with no friction
The above graphs only show how much the force exerted on the gate/board. When designing a
specific gate or board, the distribution/location of the force, and the specific structures of the
board/gate, such as hinges, must be taken into account.

60 of 88
7. Effect of Wear on Road Restraint Equipment
The lashing capacity of particular restraint equipment is proportional to its breaking force:
bsFkLC (25)
where, LC is the lashing capacity of the equipment, Fb presents the breaking force of the equipment,
ks is the safety factor (ks = 1/3 for rope, k = ½ for chain)
The rest of the details including the relationship between the breaking force and diameter and
lashing capacity calculations are available in the appendix A.
The results show that only 5% reduction of the width or diameter of restraint equipment will make
the use of the equipment risky. It is recommended that the width or diameter of the damaged
section be measured prior to use. The values can be used based in the equation below to assure the
health of the equipment.
𝐴𝑙𝑙𝑜𝑤𝑒𝑑 𝑑𝑎𝑚𝑎𝑔𝑒 𝑣𝑎𝑙𝑢𝑒 = 100 − (𝐷𝑖𝑎𝑚𝑒𝑡𝑒𝑟 𝑜𝑟 𝑤𝑖𝑑𝑡ℎ𝑠 𝑜𝑓 𝑡ℎ𝑒 𝑑𝑎𝑚𝑎𝑔𝑒𝑑 𝑠𝑒𝑐𝑡𝑖𝑜𝑛
𝑂𝑟𝑖𝑔𝑖𝑛𝑎𝑙 𝑑𝑖𝑎𝑚𝑒𝑡𝑒𝑟 𝑜𝑟 𝑤𝑖𝑑𝑡ℎ𝑋100) (26)
The value calculated above should not be above 5. Replacement of the restraint equipment is
recommended for Allowed damage values bigger than 5.

61 of 88
8. Appendix A In this appendix the calculations, formulations and equations used as a proof or to prove concepts
which are used in the context of the report are mentioned. It has been tried to write the report and
appendixes as individual pieces. Some materials might be repeated from the report as a result.
8.1. Braking We can assume that the aerodynamic force Fa is applied at the centre of gravity. From the static
equilibrium, we have:
a2r1r2b1bx F)FF(sinmgFFma (1.1)
cosmgFF 2z1z
(1.2)
cosmgahmasinhmghFLF 2xa1z (1.3)
Solving equations (1.1), (1.2) and (1.3) yields:
)]FFFF(hcosmga[L
1F 2r1r2b1b21z (1.4)
)]FFFF(hcosmga[L
1F 2r1r2b1b12z
(1.5)
1rF , 2rF , aF can be neglected.
)coshcosa(mgL
FF x2x
1zxmax1b
(1.6)
)coshcosa(mgL
FF x1x
2zxmax2b
(1.7)
Maximum deceleration:
g)sincos(a xx (1.8)
If the vehicle is travelling on a level road:
ga xmaxx (1.9)
If the vehicle is travelling uphill:
g)sincos(a xmaxx (1.10)
If the vehicle is travelling downhill:
g)sincos(a xmaxx (1.11)
Ideal braking forces distribution:
x
x
z
z
b
b
ha
ha
F
F
F
F
1
2
2
1
2
1 (1.12)

62 of 88
8.1.1. Friction Coefficient
Deceleration rate (in g OR friction coefficient) on Bitumen road with ABS
Deceleration rate (in g OR friction coefficient) on Bitumen road without
8.2. Hard Acceleration From the static equilibrium, we have:
a2r1rx2t1t F)FF(sinmgmaFF (1.18)
cosmgFF 2z1z (1.19)
cosmgasinhmghmahFLF 2xaa1z (1.20)
Equation (1.18) provides:
m
F)FF(sinmgFFa a2r1r2t1t
x
(1.21)

63 of 88
Maximum acceleration: the maximum acceleration of the vehicle can be achieved when the tires
reach their maximum traction potentials at the same time:
1zxmax1t FF ; 2zxmax2t FF (1.22)
From (1.19), (1.21), and (1.22) we have:
m
F)FF(sinmgcosmga a2r1rx
x
(1.23)
As max2tmax1ta2r1r FFFFF
(1.23) becomes:
g)sincos(a xmaxxf (1.24)
If the vehicle is travelling on a level road:
ga xmaxx (1.25)
If the vehicle is travelling uphill:
g)sincos(a xmaxx (1.26)
If the vehicle is travelling downhill:
g)sincos(a xmaxx (1.27)
8.2.1. Power limited acceleration
The Newton’s Second Law read:
xxxxe vma1
vF1
P
(1.28)
or x
ex
v
1
m
Pa
(1.29)
where η is the efficiency of the vehicle. If Pe = PM, the maximum acceleration will be:
x
Mmaxx
v
1
m
Pa (1.30)
With a rarely very high power to weight ratio of 54.22 W/kg for truck (Ahanotu, 1999), and a high
efficiency of 0.9, (1.30) becomes:
xx
maxxv
8.48
v
1 x 22.54 x 9.0a (1.31)
If the vehicle is traveling with vx > 10 m/s (36 km/h), the maximum acceleration will be:

64 of 88
0.5g ][m/s 88.410
8.48a 2
maxx (1.32)
Therefore, a maximum forward acceleration that higher than 0.5g may only occur at velocity less
than 10 m/s.
8.2.2. Transmission System
The torque delivered through the clutch as input to the transmission is:
eeec ITT (1.33)
where:
Tc is torque at the clutch as the input to the transmission
Te is engine torque at a given speed
Ie is engine rotational inertia
αe is engine rotational acceleration
Similarly, the torque delivered at the output of the transmission is:
tetcd i)IT(T (1.34)
where:
Td is torque at the driveshaft
It is rotational inertia of transmission as seen from the engine side
it is ratio of the transmission
The torque as the input to the axles to accelerate rotating wheels and provide traction at the ground
is:
wwtfddda IrFi)IT(T (1.35)
where:
Ta is torque on the axles
Id is rotational inertia of the driveshaft
αa is driveshaft rotational acceleration
if is ratio of the final drive
Ft is tractive force at the ground
Iw is the rotational of the wheels and axles shafts
αw is the rotational acceleration of the wheels

65 of 88
r is the wheels radius
The above rotational accelerations are related to each other as the following:
wftdtewfd iii;i (1.36)
From (1.33) to (1.36), with the inefficiencies due to mechanical and viscous losses in the driveline
components taken into account, we have:
2
xw
2
fd
2
f
2
ttetffte
tr
a]IiIii)II[(ii
r
TF (1.37)
From (1.18), we have:
a2r1rtx F)FF(sinmgFma (1.38)
Substituting (1.37) in (1.38) yields:
a2r1r2
xw
2
fd
2
f
2
ttetffte
x F)FF(sinmgr
a]IiIii)II[(ii
r
Tma (1.39)
or
a2r1rtffte
x2w
2
fd
2
f
2
tte F)FF(sinmgiir
Ta}
r
1]IiIii)II[(m{ (1.40)
The rotational inertia terms are usually lumped in with the mass of the vehicle, so the simplified
equation will be:
a2r1rtffte
xr F)FF(sinmgiir
Ta)mm( (1.41)
where,
mr is the equivalent mass of the rotating components.
The combination of the two masses is an “effective mass”, and the ratio of (m+mr)/m is “mass
factor”. The mass factor of a vehicle will depend on the operating gear (Gillespie, 1995) :
2
f
2
t i0.0025i0.04 1 factor mass (1.42)
If all the resistance forces are neglected, (1.41) will be written as:
xr
Mtfx
v
1
mm
Pa
(1.43)
(1.43) shows that, the acceleration is far less than that calculated from (1.30). Therefore, the
theoretical acceleration of 0.5g may only occur at low speed even far less than 10 m/s.

66 of 88
8.3. Dynamics of a Turning Vehicle The Newton-Euler equations of motion for a rigid vehicle in the body coordinate frame B, which is
the frame attached to the vehicle at its centre of gravity C, are:
yxx mrvvmF (1.51)
xyy mrvvmF (1.52)
zz IrM (1.53)
where, vx, vy, are longitudinal, lateral velocity of the vehicle centre expressed in the body coordinate
frame, r is the yaw rate of the vehicle ,m presents the weight of the vehicle, Iz is the rotational inertia
of the vehicle about Cz.
The force system acting on the vehicle includes:
4x3x22y11yx FFsinFsinFF (1.54)
4y3y22y11yy FFcosFcosFF (1.55)
)FF(b)FFsinFsinF(2
w)cosFcosF(a)MMMM(M 4y3y4x3x22y11y22y11y4z3z2z1zz (1.56)
Coupling (1.51), (1.52), (1.53) with (1.54), (1.55), (1.56) yields the equations of motion of the turning
vehicle:
y4x3x22y11yx rv)FFsinFsinF(m
1v (1.57)
x4y3y22y11yy rv)FFcosFcosF(m
1v (1.58)
)]FF(b)FFsinFsinF(2
w)cosFcosF(a)MMMM([
I
1r 4y3y4x3x22y11y22y11y4z3z2z1z
z
(1.59)
In order to take the non-linearity characteristics of the tyre into consideration, the Magic Formula is utilised
for tyre modelling.
),F(FF iziyiyi (1.60)
),F(MM izizizi (1.61)
where,
Fzi presents vertical load under the tyre number i
αi is side slip of the tyre number i
During cornering manoeuvre, load is transferring laterally and longitudinally. These effects are
modelled as the following equations:
y
g
x
g
1z awL
mbha
L2
mh
L2
mgbF (1.62)

67 of 88
y
g
x
g
1z awL
mbha
L2
mh
L2
mgbF (1.63)
y
g
x
g
1z awL
mbha
L2
mh
L2
mgbF
(1.64)
y
g
x
g
1z awL
mbha
L2
mh
L2
mgbF
(1.65)
The side slip angle relate to the motion of the vehicle as the following equations:
r
2
wv
arvtan
x
y1
11
(1.66)
r
2
wv
arvtan
x
y1
22
(1.67)
r
2
wv
brvtan
x
y1
3
(1.68)
r
2
wv
brvtan
x
y1
4
(1.69)
The equations of motion are modelled in Simulink environment, as shown in Figure:
Dynamic model of a turning vehicle built in Simulink environment

68 of 88
In assessing lateral acceleration, the steering command is given as a step input (for a circular
motion). The sharp ends of the input are smoothened by using sinusoidal function, as shown in
equation (1.70):
x
x
x
v
30 t;1.0
v
30t0 0.05;)
230
v0.05sin(
0 t;0
(1.70)
Figures (1.16) to (1.19) shows normal forces, lateral forces, saturated lateral forces under the tyres
of a typical truck, and the lateral acceleration of the vehicle during the manoeuvre.
8.4. Jack-Knifing The equations of motion of the cornering trailer are written as:
cos)FF()FF(cos)FF(sin)FF(sin)FF(
sin)r(cmcos)r(cm)hrvru(m)vru(m
6x5x4x3x2x1x6y5y2y1y
2
2
2
2
21
(1.71)
sin)FF(sin)FF(cos)FF()FF(cos)FF(
cos)r(cmsin)r(cm)rhurv(m)urv(m
6x5x2x1x6y5y4y3y2y1y
2
2
222
(1.72)
sin)FF(2
t)FF(
2
tcos)FF(
2
t
Tsin)FF(hsin)FF(acos)FF(h)FF(bcos)FF(a
]cos)r(cmsin)r(cm)rhurv(m[hrI
2y1y1
4x3x2
2x1x1
6x5x2x1x6y5y4y3y2y1y
2
2
221
(1.72)
T)FF(2
t)FF)(dc(
}sin]sin)r(cmcos)r(cm)hrvru(m[
cos]cos)r(cmsin)r(cm)rhurv(m{[c)r(I
6x5x3
6y5y
2
2
2
2
2
2
2
222
(1.74)
where, m1 = mass of the tractor, m2 = mass of the trailer, I1 = moment of inertia of the tractor, I2 =
moment of the inertia of the trailer, Fxi = longitudinal force on tyre number I, Fyi = lateral force on
tyre number I, Fzi = vertical load on tyre number I, T = moment due to friction at the fifth-wheel, δ =
front wheel steering angle, tj = lateral distance between the centre of tyre contact or between the
point centrally located between the centres of tyre contact for dual wheel.
a = distance between the tractor’s centre of mass and the front axle, b = distance between the
tractor’s centre of mass and the rear axle, h = distance between the tractor’s centre of mass and the
fifth-wheel, c = distance between the trailer’s centre of mass and the fifth-wheel, d = distance
between the trailer’s centre of mass and the trailer axle, z = height of the fifth-wheel above the
ground, z1 = height of the tractor’s centre of mass above the ground, z2 = height of the trailer’s
centre of mass above the ground.

69 of 88
8.5. Travelling Over Bumps The equations of motion can be written as:
Fx]k[x]c[x]m[ (1.75)
where,
2
1
x
x
0
x
x (1.76)
2
1
y
m000
0m00
00I0
000m
]m[ (1.77)
2222
1111
2211
2
22
2
111122
21112221
c0cac
0ccac
cacaacaccaca
cccacacc
]c[ (1.78)
2t2222
1t1111
2211
2
22
2
111122
21112221
kk0kak
0kkkak
kakaakakkaka
kkkakakk
]k[ (1.79)
2t2
1t1
ky
ky
0
0
F (1.80)
Speed bump input
Sine bump input
The speed bump can be described as a sinusoidal function of longitudinal translation or of time:
H x
y
S
H t
y
T

70 of 88
xS
2sinH)x(y
(1.81)
vtS
2sinHt
T
2sinH)t(y
(1.82)
If the front excitation input is determined by:
vtS
2sinH)t(y1
(1.83)
Then, then rear excitation input will be:
)v
Lt(v
S
2sinH)t(y2
(1.84)
where, L is the wheelbase of the vehicle.
8.6. Minor Collision
The Newton’s law of restitution states that:
101012 eIII (1.86)
or
1012 I)1e(I (1.87)
where, e is called the coefficient of restitution. The law can also be expressed as:
12 epp (1.88)
The Newton’s law equation (1.88), coupled with momentum equation (1.85) are sufficient to
determine the final velocities of the two vehicles.
Applying parameters at the instant t2 to (1.84), and rewriting (1.87) yields:
2121 mvImv (1.89)
2121 MVIMV (1.90)
)vV(evV 1122 (1.91)
Solving the three equations system provides:
)vV)(e1(
M
m1
1vvv 1121
(1.92)

71 of 88
)vV)(e1(
1m
M
1VVV 1121
(1.93)
The vehicle B with mass m travelling at 30 km/h, and collides with the car A with a mass M moving
at the same speed.
)e1(
M
m1
67.16)
6.3
30
6.3
30)(e1(
M
m1
1vvv 21
(1.94)
Let us determine the Δv of the vehicle B for 0 ≤ e ≤ 1, and 0.1m ≤ m ≤ 10M
As the real impact practically lasts for about 1/10 second (Macmillan, 1983), in this estimation we
assume that Δt = t2 – t1 = 0.1 (s). Therefore, the average deceleration that the vehicle B experiences
is:
)1(
1
7.166. e
M
mt
va crashx
(1.95)
The average deceleration rate of the vehicle B is illustrated in Figure 1.28 with the minimum value of
15.15 m/s2 associated with e = 0 (totally inelastic) and m/M = 10;
As a fixed block is expressed as 0V ;M 1 , (1.92) becomes:
6.3
30)e1(v)e1(v 1 (1.96)
Therefore, the average deceleration is:
)(m/s 3.833.83)e1(t
va 2
crash.x
(1.97)
The vehicles A and B (masses are m and M) moving at the same speed v.
)1(
1
5556.0)
6.36.3)(1(
1
121 e
M
m
vvve
M
mvvv
(1.98)
The average deceleration that the vehicle B experiences will be:
81.9 8.08.0)1(
1
556.5. xge
M
m
v
t
va crashx
(1.99)
or

72 of 88
)1()1(
4125.1
M
m
ev
(1.100)
Vehicle B with mass m travelling at v (km/h) collides with a fixed block.
1)1( vev (1.101)
Therefore, the average deceleration is:
9.81 x 0.8 0.8g )1(10 1.
ve
t
va crashx (1.102)
or
e1
0.7848 1
v (1.103)
8.7. Tie-Down Lashing
8.7.1. Symmetry
The clamping force Fc must satisfy:
Sliding balance:
k*W ≤ μ(W + Fc) (2.1)
Tipping balance:
h*k*W ≤ b(W + Fc) (2.2)
The tensioning force needed (one lashing) to safely restraint load on the vehicle is now written as:
Sliding balance:
k*W + ≤ μ[W + 2FTsinα] (2.3)
Tipping balance:
h*k*W ≤ b*W + 2b*FTsinα (2.4)
And, maximum weight each lashing can safely restraint is:
Sliding balance:
k
sinF2W T
for k > μ (2.5)
If k ≤ μ, (2.3) is always satisfied. However, the tie-down lashings must be pre-tensioned to provide a
minimum clamping force of 20% of the weight of the load. This is because the load must always
remain in contact with the deck during road vibration and over bumps to maintain the friction force
during normal driving. To meet the requirement, the maximum weight can be determined by the
following:

73 of 88
W ≤ 10FTsinα for k ≤ μ (2.6)
Tipping balance:
bhk
sinbF2W T
for hk > b (2.7)
W ≤ 10FTsinα for hk ≤ b (2.8)
8.7.2. Asymmetry
The tensioning force needed, in the worst case, to safely restraint load on the vehicle is now written
as:
Sliding balance:
k*W + FT(1 -c2)cosα ≤ μ[W + FT(1 +c
2)sinα] (2.9)
Tipping balance:
h*k*W + 2h* FT(1 -c2)cosα ≤ b*W + 2b*c
2FTsinα (2.10)
And, maximum weight each lashing can safely restraint is:
Sliding balance:
k
]cos)1c(sin)c1([FW
22
T for k > μ (2.11)
W ≤ 5FT(1+c2)sinα for k ≤ μ (2.12)
Tipping balance:
bhk
]cos)1c(h2sinbc2[FW
22
T
for hk > b (2.13)
W ≤ 5FT(1+c2)sinα for k ≤ μ (2.14)
8.7.3. Safety Factor
cos)1c(sin)c1(
sin2
k
)]1c(sin)c1([F:
k
sinF2K
22
22
TTL (2.15)
or
cos)1e(sin)e1(
sin2K
'2'2L (2.16)
The maximum load weight that a particular lashing can safely restraint by (2.5), the real value should
be used as the following:

74 of 88
L
T
K)k(
sinF2W
(2.17)
or
k
sinFW T
max (2.18)
8.8. Direct Lashing The minimum strength required for each of n lashings directly restraining is:
kWcosnF minT (2.19)
or
cos
k
n
WF minT (2.20)
where, k is the coefficient of acceleration (0.8 forward, 0.5 rearward, and 0.5 sideward), n presents
the number of lashing , W is the weight of the load, α is the angle of the lashing with respect to the
direction of acceleration.
The minimum strength (lashing capacity) required for only one lashing to restrain 100 kg load with k
= 0.8, and k = 0.5. For this load configuration, the formula (2.20) becomes:
cos
k
1
100F minT (2.21)
8.9. Conditions Likely to Effect Better or Worse of the Safe Carriage of
Loads If the ratio of the front braking force to that of the rear is c, there is only a value of friction
coefficient that is fully utilised. That friction coefficient is determined by (3.1)
01
02
2
1
ha
ha
F
Fc
b
b
(3.1)
or
)1(
210
ch
aca (3.2)
If the friction coefficient is more than this value, μ1 > μ0, the rear wheels are locked before the front
braking force reaches its capacity.
The braking force at rear wheel will be:
)( 11
212 hagamL
FF zb
(3.3)

75 of 88
The braking force at front wheel:
)( 11
21 hagamL
ccFF bb
(3.4)
The total braking force of the vehicle:
machagamL
FFF bbb )1)(( 11
21
(3.5)
The maximum deceleration:
gLhc
aca
)1(
)1(
1
11
(3.6)
If the friction coefficient is more than this value, μ2 < μ0, the front wheels are locked before the rear
braking force reaches its capacity.
The braking force at front wheel will be:
)( 22
121 hagamL
FF zb
(3.7)
The braking force at rear wheel:
)( 221
2 hagamcLc
FF b
b
(3.8)
The total braking force of the vehicle:
mac
chagam
LFFF bbb
)
1)(( 2
221
(3.9)
The maximum deceleration:
ghccL
caa
)1(
)1(
2
22
(3.10)
8.10. Effect of Wear for Load Restraint Equipment
The lashing capacity of a particular restraint equipment is proportional to its breaking force:
bsFkLC (5.1)
where, LC is the lashing capacity of the equipment, Fb presents the breaking force of the equipment,
ks is the safety factor (ks = 1/3 for rope, k = ½ for chain)
The relationship between the breaking force and its diameter can be written as:
E4
dF
2
b (5.2)
where, d is the diameter of the equipment, E is the modulus of breaking point.

76 of 88
Therefore, the lashing capacity is:
E4
dkLC
2
s (5.3)
If the wear is denoted by Δd, which is the reduction of the diameter, the reduced lashing capacity
will be:
E4
)dd(kLC
2
s1
(5.4)
From (5.3) and (5.4), we have:
21 )
d
dd(
LC
LC (5.5)
If the acceptable lashing capacity is 90% (weakened by 10% as stated in the current LRG), the
maximum acceptable wear level will be:
9.0)d
dd( 2
(5.6)
or
9487.09.0d
d1
(5.7)
or
%5d
d
(5.8)

77 of 88

78 of 88
9. Appendix B
Lashing angle: sinE
Old New
Tie-down angle effect (page 189)
The curve provides any value of tie-down effect between 00 and 900 tie-down angle

79 of 88
2. Maximum weight each rope/chain can restrain? Using Tie-down Load Tables
Formula: If the front of the load is not blocked (ax.max = 0.8mg)
8.0
EF2 mor
8.0
EF2m mg8.0 )EF2mg( ma)EF2mg( T
maxT
Tmax.xT (provided that μ < 0.8)
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 191)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 50 x 9.81 N)

80 of 88
If the front of the load is blocked (ax.max = 0.5mg) as the blocking has the capacity to provide the additional 0.3mg forward restraint
mg5.0 )EF2mg( ma)EF2mg( Tmax.xT If μ < 0.5, the condition becomes 5.0
EF2m T
or
5.0
EF2m T
max
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 191)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 50 x 9.81 N)
μ ≥ 0.5
μ = 0.4
μ = 0.3

81 of 88
If μ ≥ 0.5, the condition is always satisfied. However, as the minimum clamping force of 20% of the weight of the load is taken into account, we have:
g
EF10 m mg2.0EF2 T
T (black curve)
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 192)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 100 x 9.81 N)

82 of 88
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 192)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 100 x 9.81 N)
μ ≥ 0.5
μ = 0.4
μ = 0.3

83 of 88
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 193)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 300 x 9.81 N)

84 of 88
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 193)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 300 x 9.81 N)
μ = 0.3
μ = 0.4
μ ≥ 0.5

85 of 88
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 193)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 750 x 9.81 N)

86 of 88
Old New
Maximum weight each rope/chain can restrain? Using Tie-Down Load Tables (page 193)
The graph gives more detailed information on Tie-down Angle Effect and Friction Coefficient (FT = 750 x 9.81 N)
μ = 0.3
μ = 0.4
μ ≥ 0.5

87 of 88
3. Lashing angle: Formula: ii cosE
Old New
Tie-down angle effect (page 202)
The curve provides any value of direct lashing effect between 0
0 and 90
0 tie-down angle
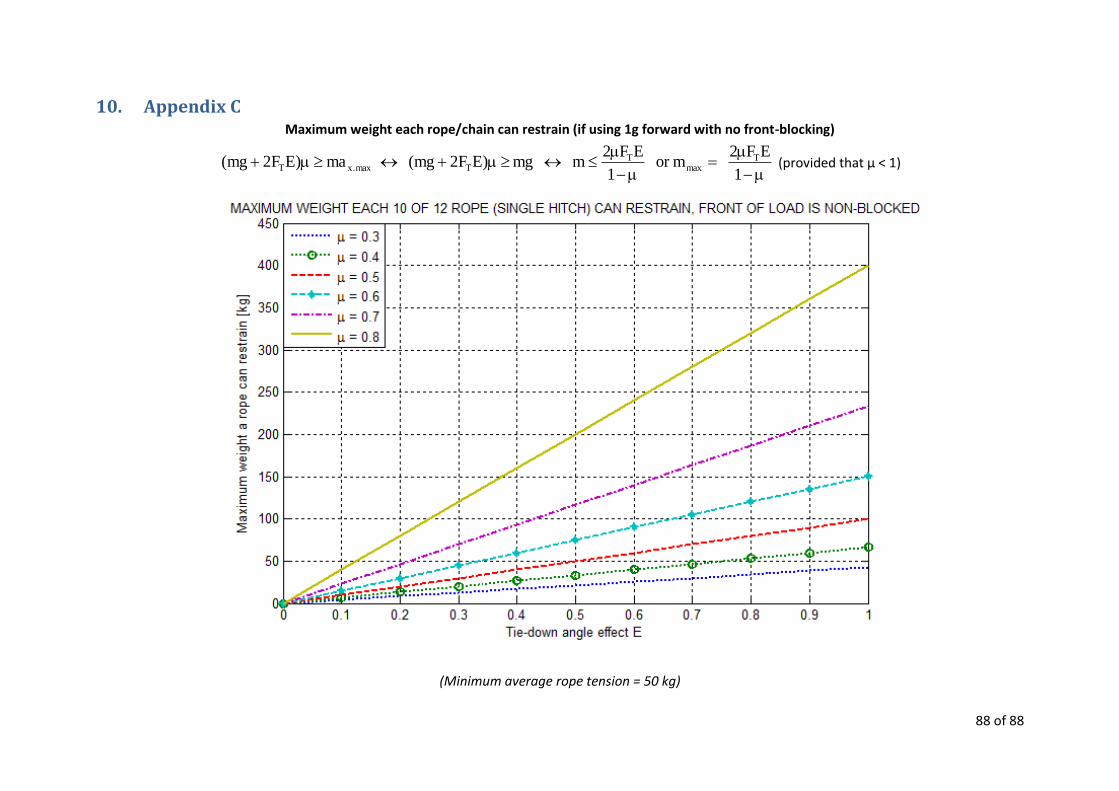
88 of 88
10. Appendix C Maximum weight each rope/chain can restrain (if using 1g forward with no front-blocking)
1
EF2 mor
1
EF2m mg )EF2mg( ma)EF2mg( T
maxT
Tmax.xT (provided that μ < 1)
(Minimum average rope tension = 50 kg)

89 of 88
Minimum average rope tension = 100 kg

90 of 88
Minimum average strap tension = 300 kg

91 of 88
Minimum average chain tension = 750 kg

92 of 88
11. REFERENCES AHANOTU, D. N. 1999. Heavy-duty vehicle weight and horsepower distributions: measurement of class-specific
temporal and spatial variability. Georgia Institute of Technology. BOUTELDJA, M., KOITA, A., DOLCEMSACOLO, V. & CADIOU, J. C. Prediction and Detection of Jackknifing Problems
for Tractor Semi-Trailer. GILLESPIE, T. D. 1995. Fundamentals of vehicle dynamics. Warrendale, Pa: Society of Automotive Engineers. HARTMAN, J. 2014. Effects of velocity, temperature and rainfall on the friction coefficient of pneumatic tyres and
bitumen roads. RMIT University. HARWOOD, D. W., PROGRAM, N. C. H. R. & BOARD, N. R. C. T. R. 2003. Review of Truck Characteristics as Factors
in Roadway Design, Transportation Research Board, National Research Council. LONG, G. 2000. Acceleration Characteristics of Starting Vehicles. Transportation Research Record, 1737, 58-70. MACMILLAN, R. H. 1983. Dynamics of vehicle collisions, St. Helier, Interscience Enterprises. MIKULCIK, E. C. 1971. The Dynamics of Tractor-Semitrailer Vehicles: The Jackknifing Problem. SAE International. PROCTOR, C. L., GRIMES, W. D., FOURNIER, D. J., RIGOL, J. & SUNSERI, M. G. 1995. Analysis of Acceleration in
Passenger Cars and Heavy Trucks. SAE International. WONG, J. Y. 2001. Theory of ground vehicles, John Wiley & Sons.
http://ntc.gov.au/Media/Reports/(E62BE286-4870-ED95-1914-1A70F3250782).pdf
Driver's Handbook on Cargo Securment ; A guide to North American Cargo Securment Standards
ttps://www.fmcsa.dot.gov/sites/fmcsa.dot.gov/files/docs/Drivers_Handbook_Cargo_Securement.pdf