1 CHAPTER 5. 2 1977: DRAM faster than microprocessors.
102
1 CHAPTER 5
-
Upload
ariel-wright -
Category
Documents
-
view
215 -
download
2
Transcript of 1 CHAPTER 5. 2 1977: DRAM faster than microprocessors.

1
CHAPTER 5

2
1977: DRAM faster than microprocessors

3
Since 1980, CPU has outpaced DRAM ...

4
How do architects address this gap?
• Programmers want unlimited amounts of memory with low latency
• Fast memory technology is more expensive per bit than slower memory
• Solution: organize memory system into a hierarchy– Entire addressable memory space available in largest,
slowest memory– Incrementally smaller and faster memories, each containing a
subset of the memory below it, proceed in steps up toward the processor
• Temporal and spatial locality insures that nearly all references can be found in smaller memories– Gives the allusion of a large, fast memory being presented to
the processor

5
Memory Hierarchy

6
Advantage of memory hierarchy

7
Memory Hierarchy Design
• Memory hierarchy design becomes more crucial with recent multi-core processors:– Aggregate peak bandwidth grows with # cores:
• Intel Core i7 can generate two references per core per clock• Four cores and 3.2 GHz clock
– 25.6 billion 64-bit data references/second +– 12.8 billion 128-bit instruction references– = 409.6 GB/s!
• DRAM bandwidth is only 6% of this (25 GB/s)• Requires:
– Multi-port, pipelined caches– Two levels of cache per core– Shared third-level cache on chip

8
Locality in Caches
• A principle that makes memory hierarchy a good idea
• If an item is referenced
– Temporal locality: it will tend to be referenced again soon
– Spatial locality: nearby items will tend to be referenced soon

9
Memory Hierarchy Basics
• When a word is not found in the cache, a miss occurs:– Fetch word from lower level in hierarchy,
requiring a higher latency reference– Lower level may be another cache or the main
memory– Also fetch the other words contained within the
block• Takes advantage of spatial locality

10
Direct Mapped Cache:For each item of data at the lower level, there is exactly one location in the cache where it might be.
e.g., lots of items at the lower level share locations in the upper level
Cache
• Two issues
– How do we know if a data item is in the cache?
– If it is, how do we find it?
• Our first example
– Block size is one word of data
– ”Direct mapped“
• Our initial focus: two levels (upper, lower)
– Block: minimum unit of data
– Hit: data requested is in the upper level
– Miss: data requested is not in the upper level

1100001 00101 01001 01101 10001 10101 11001 11101
000
Cache
Memory
001
010
011
100
101
110
111
Direct mapped cache
• Mapping
– Cache address is Memory address modulo the number of blocks in the cache
– Find a cache location:
• (Block address) modulo (#Blocks in cache)

12

13
• What kind of locality are we taking advantage of?
• How many words does this cache store?
• How do we determine if the data we are looking for is in the cache?
Direct mapped cache
• For a 32-bit byte address• Cache size is 2n blocks, so n bits
are used for the index• Block size is 2m words (2m+2 bytes),
m bits are used to the address the word in a block, two bits are used for the byte part of the address
• Size of the tag field is 32 – (n + m + 2)

14
Direct mapped cache
• Taking advantage of spatial locality
• (16KB cache, 256 Blocks, 16 words/block)
• For a 32-bit byte address
• Cache size is 2n blocks, so n bits are used for the index
• Block size is 2m words (2m+2 bytes), m bits are used to the address the word in a block, two bits are used for the byte part of the address
• Size of the tag field is 32 – (n + m + 2)

15
Block Size vs. Performance

16
Block Size vs. Cache Measures
• Increasing Block Size generally increases Miss Penalty and decreases Miss Rate
Block Size Block Size
Block Size
MissRate
MissPenalty
Avg.MemoryAccessTime
X =

17
Number of Bits?
• How many bits are required for a direct-mapped cache with 16 KB of data and 4-word blocks, assuming a 32-bit address?
• The 16 KB cache contains 4K words (212)
• There are 1024 blocks (210) because block size is 4 words. n = 10
• Each block has 4 * 32, or 128 bits of data plus the tag, and valid bit
• Cache size = (210) * (bits for words in block + valid bit + tag)
• Cache size = (210) * (128 + 1 + tag)
• How many bits are used for the tag?
• 32 – (n + m + 2) = 32 – (10 + 2 + 2) = 18 bits
• Cache size = (210) * (128 + 1 + 18) = (210) * 147 or 147 Kbits
Cache size is 2n blocks
Block size is 2m words

18
Four Questions for Memory Hierarchy Designers
• Q1: Where can a block be placed in the upper level? (Block placement)
• Q2: How is a block found if it is in the upper level? (Block identification)
• Q3: Which block should be replaced on a miss? (Block replacement)
• Q4: What happens on a write? (Write strategy)

19
Q1: Where can a block be placed in the upper level?
• Direct Mapped: Each block has only one place that it can appear in the cache.
• Fully associative: Each block can be placed anywhere in the cache.– Must search entire cache for block (costly in terms of time)– Can search in parallel with additional hardware (costly in terms
of space)
• Set associative: Each block can be placed in a restricted set of places in the cache.– Compromise between direct mapped and fully associative– If there are n blocks in a set, the cache placement is called n-
way set associative

20
Associativity Examples
Fully associative:Block 12 can go anywhere
Direct mapped: Block no. = (Block address) mod (No. of blocks in cache)Block 12 can go only into block 4(12 mod 8)
Set associative:Set no. = (Block address) mod (No. of sets in cache)Block 12 can go anywhere in set 0(12 mod 4)

21
Direct Mapped Cache

22
2 Way Set Associative Cache

23
Fully Set Associative Cache

24
An implementation of a four-way set associative cache

25
Performance

26
Q2: How Is a Block Found If It Is in the Upper Level?
• The address can be divided into two main parts– Block offset: selects the data from the block
offset size = log2(block size)– Block address: tag + index
• index: selects set in cacheindex size =
log2(#blocks/associativity)– tag: compared to tag in cache to determine hit
tag size = address size - index size - offset size
Tag Index

27
Set Associative Cache Problem
• Design an 8-way set associative cache that has 16 blocks and 32 bytes per block. Assume 32-bit addressing. Calculate the following:– How many bits are used for the block offset?– How many bits are used for the set (index) field?– How many bits are used for the tag?
• Offset Size = log2(Block Size)• Offset Size = log2(32)• Offset Size = 5-bits
• Index Size = log2(#blocks/associativity)• Index Size = log2(2)• Index Size = 1-bit
• Tag Size = Address Size – Index Size - Offset• Tag Size = 32 – 1 – 5 • Tag Size = 26-bits

28
Q3: Which Block Should be Replaced on a Miss?
• Easy for Direct Mapped• Set Associative or Fully Associative:
– Random - easier to implement– Least Recently used - harder to implement - may
approximate• Miss rates for caches with different size, associativity and
replacement algorithm.Associativity: 2-way 4-way 8-waySize LRU Random LRU Random LRU Random16 KB 5.18% 5.69% 4.67% 5.29% 4.39% 4.96%64 KB 1.88% 2.01% 1.54% 1.66% 1.39% 1.53%256 KB 1.15% 1.17% 1.13% 1.13% 1.12% 1.12%

29
Q4: What Happens on a Write?
• Write through: The information is written to both the block in the cache and to the block in the lower-level memory.
• Write back: The information is written only to the block in the cache. The modified cache block is written to main memory only when it is replaced.
• Is block clean or dirty? (add a dirty bit to each block)• Pros and Cons of each:
– Write through
• read misses cannot result in writes to memory,• easier to implement• Always combine with write buffers to avoid memory
latency– Write back
• Less memory traffic• Perform writes at the speed of the cache

30
Q4: What Happens on a Write?

31
Q4: What Happens on a Write?
• Since data does not have to be brought into the cache on a write miss, there are two options:– Write allocate
• The block is brought into the cache on a write miss• Used with write-back caches• Hope subsequent writes to the block hit in cache
– No-write allocate
• The block is modified in memory, but not brought into the cache
• Used with write-through caches• Writes have to go to memory anyway, so why bring
the block into the cache

32
Hits vs. misses
• Read hits
– This is what we want!
• Read misses
– Stall the CPU, fetch block from memory, deliver to cache, restart
• Write hits
– Can replace data in cache and memory (write-through)
– Write the data only into the cache (write-back the cache later)
• Write misses
– Read the entire block into the cache, then write the word

33
Cache Misses
• On cache hit, CPU proceeds normally
• On cache miss
– Stall the CPU pipeline
– Fetch block from next level of hierarchy
– Instruction cache miss
• Restart instruction fetch– Data cache miss
• Complete data access

34
Performance
• Simplified model
– Execution time=(execution cycles + stall cycles)*cct
• stall cycles= #of instructions*miss ratio*miss penalty
• Two ways of improving performance
– Decreasing the miss ratio
– Decreasing the miss penalty
• What happens if we increase block size?

35
Cache Measures
• Hit rate: fraction found in the cache– Miss rate = 1 - Hit Rate
• Hit time: time to access the cache• Miss penalty: time to replace a block from lower level,
– access time: time to access lower level – transfer time: time to transfer block
CPU time = (CPU execution cycles + Memory stall cycles)*Cycle time
penalty MissnInstructio
Misses
Program
nsInstructio
penalty Missrate MissProgram
accessesMemory
cycles stallMemory

36
Cost of Misses
• Average memory access time =
Hit Time + Memory stall cycles
• Note that speculative and multithreaded processors may execute other instructions during a miss– Reduces performance impact of misses

37Assume 75% instruction, 25% data access

38
Assume 75% instruction, 25% data access
• Which has a lower miss rate: a 16-KB instruction cache with a 16-KB data cache or a 32-KB unified cache?– 16KB Instruction cache miss rate: 0.64%– 16KB Data cache miss rate: 6.47%– 32KB Unified cache miss rate: 1.99%
Miss rate of separate caches = (75% * 0.64%) + (25% * 6.47%)
= 2.10%

39
Assume 75% instruction, 25% data access
• What is the average memory access time for the separate instruction and data caches and unified cache assuming write-through caches with a write buffer. Ignore stalls due to the write buffer. A hit takes 1 clock cycle and a miss penalty costs 50 clock cycles. A load or store hit on the unified cache takes an extra clock cycle.
– 16KB Instruction cache miss rate: 0.64%– 16KB Data cache miss rate: 6.47%– 32KB Unified cache miss rate: 1.99%
• Split• Average memory access time = 75% * (1 + 0.64% * 50) + 25% * (1 + 6.47% * 50)
= 75% * 1.32 + 25% * 4.235
= 2.05 cycles
• Unified• Average memory access time = 75% * (1 + 1.99% * 50) + 25% * (1 + 1+ 1.99% * 50)
= (75% * 1.995) + (25% * 2.995)
= 2.24 cycles
Average Access Time = % inst * (Hit time + instruction miss rate * miss penalty) +
%data * (Hit time + data miss rate * miss penalty)

40
Cost of Misses, CPU time

41

42

43
Improving Cache Performance
• Average memory-access time = Hit time + Miss rate x Miss penalty
• Improve performance by:1. Reduce the miss rate, 2. Reduce the miss penalty, or3. Reduce the time to hit in the cache.

44
Types of misses
• Compulsory– Very first access to a block (cold-start miss)
• Capacity– Cache cannot contain all blocks needed
• Conflict– Too many blocks mapped onto the same
set

45
How do you solve
• Compulsory misses?– Larger blocks with a side effect!
• Capacity misses?– Not much options: enlarge the cache
otherwise face “thrashing!”, computer runs at a speed of the lower memory or slower!
• Conflict misses?– Full associative cache with a cost of
hardware and may slow the processor!

46
Basic cache optimizations:
– Larger block size• Reduces compulsory misses• Increases capacity and conflict misses, increases miss
penalty– Larger total cache capacity to reduce miss rate
• Increases hit time, increases power consumption– Higher associativity
• Reduces conflict misses• Increases hit time, increases power consumption
– Higher number of cache levels• Reduces overall memory access time

47
3. Reducing Misses via Victim Cache
• Add a small fully associative victim cache to place data discarded from regular cache
• When data not found in cache, check victim cache• 4-entry victim cache removed 20% to 95% of conflicts for a 4 KB direct
mapped data cache• Get access time of direct mapped with reduced miss rate

48
4. Reducing Misses by HW Prefetching of Instruction & Data
• E.g., Instruction Prefetching– Alpha 21064 fetches 2 blocks on a miss– Extra block placed in stream buffer– On miss check stream buffer– Norman Jouppi [1990 HP] 1 data stream buffer got 25% of
misses from 4KB cache; 4 streams got 43%• Works with data blocks too:
– Palacharla & Kessler [1994] for scientific programs for 8 streams got 50% to 70% of misses from 2 64KB, 4-way set associative caches
• Prefetching relies on extra memory bandwidth that can be used without penalty

49
5. Reducing Misses by SW Prefetching Data
• Data Prefetch– Load data into register (HP PA-RISC loads)– Cache Prefetch: load into cache (MIPS IV, PowerPC, SPARC v. 9)– Special prefetching instructions cannot cause faults;
a form of speculative execution
• Issuing Prefetch Instructions takes time– Is cost of prefetch issues < savings in reduced misses?

50
Multi-Level Caches
• Second level cache accessed on first level cache miss• On first level miss, only pay the cost of accessing second level instead of main
memory
• Different design considerations– Primary Cache: Minimize hit time to yield shorter clock cycle or fewer
pipeline stages– Secondary Cache: Reduce miss rate to reduce penalty of main memory
accesses
• Primary cache is generally smallest– May use smaller block size and lower associativity to reduce the miss penalty
• Secondary cache is much larger– May use larger block size and higher associativity
• Intel Core i7-980X Gulftown (Cache size per core)– 32KB Level 1 Data Cache– 32KB Level 1 Instruction Cache– 256KB Level 2 Cache– 12MB Level 3 Cache

51
Multi-Level Cache Performance Example
• Suppose we have a processor with a base CPI of 1.0, assuming all references hit the primary cache, and a clock rate of 4 GHz. Assume a main memory access time of 100 ns, including all the miss handling. Suppose the miss rate per instruction at the primary cache is 2%.
• How much faster will the processor be if we add a secondary cache that has a 5ns access time for either a hit or a miss, and is large enough to reduce the miss rate to main memory to 0.5%.
Total CPI = Base CPI + Memory-stall cycles per instruction= 1.0 + 2%*400
= 9.0
Total CPI = Base CPI + Memory-stall cycles per instruction

52
Multi-Level Cache Performance Example
Main Memory Miss Penalty = 400 clock cycles
1st Level Total CPI = 9.0
Total CPI = 1 + primary stalls per instruction + secondary stalls per instruction = 1 + (2% * 20) + (0.5% * 400)
= 3.4
Speedup = 9.0/3.4
= 2.6

53
7. Reducing Misses by Compiler Optimizations
• Instructions– Reorder procedures in memory so as to reduce misses– Profiling to look at conflicts– McFarling [1989] reduced caches misses by 75% on 8KB direct
mapped cache with 4 byte blocks• Data
– Merging Arrays: improve spatial locality by single array of compound elements vs. 2 arrays
– Loop Interchange: change nesting of loops to access data in order stored in memory
– Loop Fusion: Combine 2 independent loops that have same looping and some variables overlap
– Blocking: Improve temporal locality by accessing “blocks” of data repeatedly vs. going down whole columns or rows

54
. Problem: referencing multiple arrays in the same dimension, with the same index, at the same time can lead to conflict misses. . Solution: Merge the independent arrays into a compound array. /* Before */ int val[SIZE]; int key[SIZE];
/* After */ struct merge { int val; int key; }; struct merge merged_array[SIZE];
Merging Arrays Example

55
Miss Rate Reduction Techniques: Compiler Optimizations
– Loop Interchange

56
Miss Rate Reduction Techniques: Compiler Optimizations
– Loop Fusion

57
• Problem: When accessing multiple multi-dimensional arrays (e.g., for matrix multiplication), capacity misses occur if not all of the data can fit into the cache.
• • Solution: Divide the matrix into smaller sub-matrices (or
blocks) that can fit within the cache
• The size of the block chosen depends on the size of the cache
• Blocking can only be used for certain types of algorithms
Blocking

58
Performance Improvement
1 1.5 2 2.5 3
compress
cholesky
(nasa7)
spice
mxm (nasa7)
btrix (nasa7)
tomcatv
gmty (nasa7)
vpenta (nasa7)
merged
arrays
loop
interchange
loop fusion blocking
Summary of Compiler Optimizations to Reduce Cache Misses

59
Memory Technology
• Performance metrics– Latency is concern of cache– Bandwidth is concern of multiprocessors
and I/O– Access time
• Time between read request and when desired word arrives
• DRAM used for main memory, SRAM used for cache

60
Latches and Flip-flops
Q
C
D
_Q

61
Latches and Flip-flops
D
C
Dlatch
D
C
QD
latch
D
C
Q Q

62
Latches and Flip-flops
Latches: whenever the inputs change, and the clock is assertedFlip-flop: state changes only on a clock edge
(edge-triggered methodology)

63
SRAM

64
SRAM vs. DRAM
Which one has a better memory density?
Which one is faster?
static RAM (SRAM): value stored in a cell is kept on a pair of inverting gates
dynamic RAM (DRAM), value kept in a cell is stored as a charge in a capacitor.
DRAMs use only a single transistor per bit of storage, By comparison, SRAMs require four to six transistors per bit
In DRAMs, the charge is stored on a capacitor, so it cannot be kept indefinitely and must periodically be refreshed. (called dynamic)
Every ~ 8 msEach row can be refreshed simultaneously
Must be re-written after being read

65
Memory Technology
• Amdahl:– Memory capacity should grow linearly with
processor speed (followed this trend for about 20 years)
– Unfortunately, memory capacity and speed has not kept pace with processors
– Fourfold improvement every 3 years (originally)
– Doubled capacity from 2006-2010

66
Memory Optimizations

67
Memory Technology
• Some optimizations:– Synchronous DRAM
• Added clock to DRAM interface• Burst mode with critical word first
– Wider interfaces• 4 bit transfer mode originally• In 2010, upto 16-bit busses
– Double data rate (DDR)• Transfer data on both rising and falling edge

68
Memory Optimizations

69
Memory Optimizations
• Graphics memory:– Achieve 2-5 X bandwidth per DRAM vs.
DDR3• Wider interfaces (32 vs. 16 bit)• Higher clock rate
– Possible because they are attached via soldering instead of socketted Dual Inline Memory Modules (DIMM)
• Reducing power in SDRAMs:– Lower voltage– Low power mode (ignores clock, continues
to refresh)

70
Virtual Machines
• First developed in 1960s• Regained popularity recently
– Need for isolation and security in modern systems
– Failures in security and reliability of standard operation systems
– Sharing of single computer among many unrelated users (datacenter, cloud)
– Dramatic increase in raw speed of processors• Overhead of VMs now more acceptable

71
Virtual Machines
•Emulation methods that provide a standard software interface
– IBM VM/370, VMware, ESX Server, Xen•Create the illusion of having an entire computer to yourself including a copy of the OS•Allows different ISAs and operating systems to be presented to user programs
– “System Virtual Machines”– SVM software is called “virtual machine monitor” or
“hypervisor”– Individual virtual machines run under the monitor
are called “guest VMs”

72
Impact of VMs on Virtual Memory
• Each guest OS maintains its own set of page tables– VMM adds a level of memory between
physical and virtual memory called “real memory”
– VMM maintains shadow page table that maps guest virtual addresses to physical addresses
• Requires VMM to detect guest’s changes to its own page table
• Occurs naturally if accessing the page table pointer is a privileged operation

73
Chapter 5 – Virtual Memory

74
Review: Major Components of a Computer

75
Virtual Memory
• Use main memory as a “cache” for secondary (disk) storage
– Managed jointly by CPU hardware and the operating system (OS)
– Allows efficient and safe sharing of memory among multiple programs
– Provides the ability to easily run programs larger than the size of the physical memory
– Simplifies loading a program for execution by providing ability for code relocation (i.e., the code can be loaded anywhere in main memory)

76
Virtual Memory
• How does it work?
– Programs share main memory (DRAM)
– Each program gets a private virtual address space containing its frequently used code and data
– Each virtual allocation is protected from other programs
– Exploit locality of memory transactions
• CPU and OS translate virtual addresses to physical addresses
– VM “block” is called a page
– VM translation “miss” is called a page fault

77
Virtual Memory
• Main memory can act as a cache for the secondary storage (disk)
• Advantages:– Illusion of having more physical memory– Program relocation – Protection

78
Two Programs Sharing Physical Memory
• A program’s address space is divided into pages (all one fixed size) or segments (variable sizes)
• The starting location of each page, in main memory and disk, is contained in the program’s “page table”
main memory
Program 2virtual address space
Program 1virtual address space

79
Pages: Virtual Memory Blocks
• Page faults: the data is not in memory, retrieve it from disk
– Takes millions of clock cycles, thus pages should be fairly large (e.g., 4KB)
– Reducing page faults is important (LRU is worth the price)
– Handled in by OS instead of hardware. Overhead is small compared to disk time
– Using write-through is too expensive so we use write-back

80
Virtual Memory
• Page Offset
– Determines the page size
• Number of bits for virtual page number do not need to match number of bits used for physical page number
Virtual page number Page offset
31 30 29 28 27 3 2 1 015 14 13 12 11 10 9 8
Physical page number Page offset
29 28 27 3 2 1 015 14 13 12 11 10 9 8
Virtual address
Physical address
Translation
• Having a large number of virtual pages presents illusion of unbounded amounts of virtual memory

81
Page Tables (Fully Associative Search Time Impractical)• Page Table
– Used for address translation
– Indexed with page number from Virtual Memory
– Provides Corresponding Physical Page number
– Each program has its own page table

82
A Program’s State
• Page Table
• PC
• Registers
• Must be saved if another program (process) wishes to use the processor
• Rather than reloading page table, processor uses a page table register to point to the table a process wants to use

83
Page Tables

84
Page Faults
• Replacement Policy
• Handle with Hardware or Software– External memory access time is large relative to
software based solution
• LRU– Costly to keep track of every page– Mechanism?
• Keep a reference bit
• OS periodically clears reference bit

85
Making Address Translation Fast
• Page tables in memory• Memory access by a program: Accesses can take twice as long
– Obtain physical address– Get data
• Make use of locality of reference– Temporal & Spatial (Words in a page)
• Solution– Special cache– Keep track of recently used translations– Translation Lookaside Buffer (TLB)
• Translation cache• Your piece of paper where you record the location of books you
need from the library

86
Making Address Translation Fast
• A cache for address translations: translation lookaside buffer

87
TLBs and caches
YesWrite access
bit on?
No
YesCache hit?
No
Write data into cache,update the dirty bit, and
put the data and theaddress into the write buffer
YesTLB hit?
Virtual address
TLB access
Try to read datafrom cache
No
YesWrite?
No
Cache miss stallwhile read block
Deliver datato the CPU
Write protectionexception
YesCache hit?
No
Try to write datato cache
Cache miss stallwhile read block
TLB missexception
Physical address

88
TLBs and Caches

89
Modern Systems
•

90
Modern Systems
Intel Nehalem AMD Barcelona
Address sizes 48 bits (vir); 44 bits (phy) 48 bits (vir); 48 bits (phy)
Page size 4KB 4KB
TLB organization L1 TLB for instructions and L1 TLB for data per core; both are 4-way set assoc.; LRU
L1 ITLB has 128 entries, L1 DTLB has 64 entries
L2 TLB (unified) is 4-way set assoc.; LRU
L2 TLB has 512 entries
TLB misses handled in hardware
L1 TLB for instructions and L1 TLB for data per core; both are fully assoc.; LRU
L1 ITLB and DTLB each have 48 entries
L2 TLB for instructions and L2 TLB for data per core; each are 4-way set assoc.; round robin LRU
Both L2 TLBs have 512 entries
TLB misses handled in hardware

91
Modern Systems
• Things are getting complicated!

92
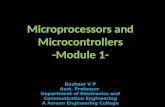
• Processor speeds continue to increase very fast— much faster than either DRAM or disk access times
• Design challenge: dealing with this growing disparity– Prefetching? 3rd level caches and more? Memory design?
Some Issues
Year
Performance
1
10
100
1,000
10,000
100,000
CPU
Memory

93
“Power Wall + Memory Wall + ILP Wall = Brick Wall”– David Patterson

94
Cache Control
• How do we control our cache?
– Can create a FSM
State Register
Combinational Control Logic
Inputs
Outputs
Inputs From Datapath
Datapath Control Outputs
Next State

95
Simple FSM Controller
AllocateRead new block from
memory
Compare TagIf Valid && Hit, Set
Valid, Set Tag, if Write Set Dirty
Idle
Write-BackWrite Old Block to
Memory
Memory not ready
Memory not ready
Cache HitMark Cache Ready
Valid CPU Request
Memory Ready
Cache Miss and Old Block is C
lean Cache Miss and Old Block is Dirty
Memory Ready

96
Cache Coherency
• Multicore processors generally share a common physical address space (clusters can as well)
• Caching shared data can create memory problems
• Different cores can have different values for the same memory location. This creates a cache coherence problem
Processor Core 0 Processor Core 1 Processor Core 2 Processor Core 3
Cache 0 Cache 1 Cache 2 Cache 3
Main Memory (DRAM)

97
Cache Coherency
• Coherence
– Defines what values can be returned by a read
• Consistency
– Determines when a written value will be returned by a read
Time Step
Event Cache Contents for
CPU A
Cache Contents for
CPU B
Memory Contents for Location X
0 0
1 CPU A reads X 0 0
2 CPU B reads X 0 0 0
3 CPU A stores 1 into X 1 0 1

98
Enforcing Coherency
• Snooping– Every cache containing a data block from memory, also has the sharing
status of the data block– All caches accessible through a broadcast medium (bus or network)– Each cache controller monitors the medium to determine whether they
have a copy of data that is requested by other processors
• Write Invalidate Protocol– Processor has exclusive access to data before writing– Invalidate copies in other caches on a write– No other readable or writable copies should exist when a write occurs– Writes are serialized

99
Write Invalidation on a Snooping Bus
Processor Activity Bus Activity Contents of CPU
A’s Cache
Contents of CPU
B’s Cache
Contents of Memory Location X
0
CPU A reads X Cache miss for X 0 0
CPU B reads X Cache miss for X 0 0 0
CPU A writes 1 to X Invalidation for X 1 Invalid 0
CPU B reads X Cache miss for X 1 1 1

100
Coherency Performance Issues
• Most protocols exchange full blocks between processors– Only one word from a block may be written by a processor– Coherency bandwidth demands may increase by exchanging full blocks
• False Sharing can occur
– When two unrelated variables are located in the same cache block, the full block is exchanged between processors even though the processors are accessing different variables
– Can be reduced by compilers and programmers through carefully laying out data

101
Further Perspective with CUDA Enabled GPUs
• Constant cache optimized for temporal locality
• Texture cache optimized for spatial locality
• Coalescing can be exploited in the Global Memory (Similar to spatial locality in a cache)
Constant Memory
Texture Memory
Constant Cache
Texture Cache
Multiprocessor
Global MemoryDRAM

102
Further Perspective with CUDA Enabled GPUs
Thread(0,0)
Thread(1,0)
Thread(2,0)
Thread(3,0)
Thread(…,0)
Thread(13,0)
Thread(14,0)
Thread(15,0)
Thread(0,1)
Thread(1,1)
Thread(2,1)
Thread(3,1)
Thread(…,1)
Thread(13,1)
Thread(14,1)
Thread(15,1)
First Warp in a Thread-Block
[0] [1] [2] [3] [...] [13] [14] [15]
[16] [17] [18] [19] [...] [29] [30] [31]
First Half-Warp in a Thread-
Block
Second Half-Warp in a
Thread-Block
Global Memory
Global Memory