







Languages
Pages
Legal


Transformation Matrices
CPSC 453 – Winter 2018Sonny Chan

Today’s Outline
• Transformations in matrix form
- scalar multiplication
- rotation / change of basis
- translation / displacement
- other types of transformations

Matrix Forms of vector operations

Scalar Multiplication
• in geometric form:
• in matrix form:
• what is S?~v
~w
~w = s~v, s 2 R
[~w] = S [~v] , S 2 R2⇥2
S =
s 00 s
�

Our Example Clock
(as borrowed from your textbook)

Uniform Scaling

Rotation (Change of Basis)
ax
ay
bx
by
~v [~v]A = ARB [~v]B ,
ARB =
cos ✓ � sin ✓sin ✓ cos ✓
�
✓

Rotation by 45°
R45�
"1p21p2
#=
"0
1
#, R45�
"0
1
#=
"�1p21p2
#

Rotation by -30°
R�30�
"p3212
#=
"1
0
#, R�30�
"0
1
#=
"12p32
#

General Transforms
What happens if we put in generic values for the matrix M?
[~w] = M [~v] ,
M =
a bc d
�

What does this matrix do? M =
0.5 00 1.5
�
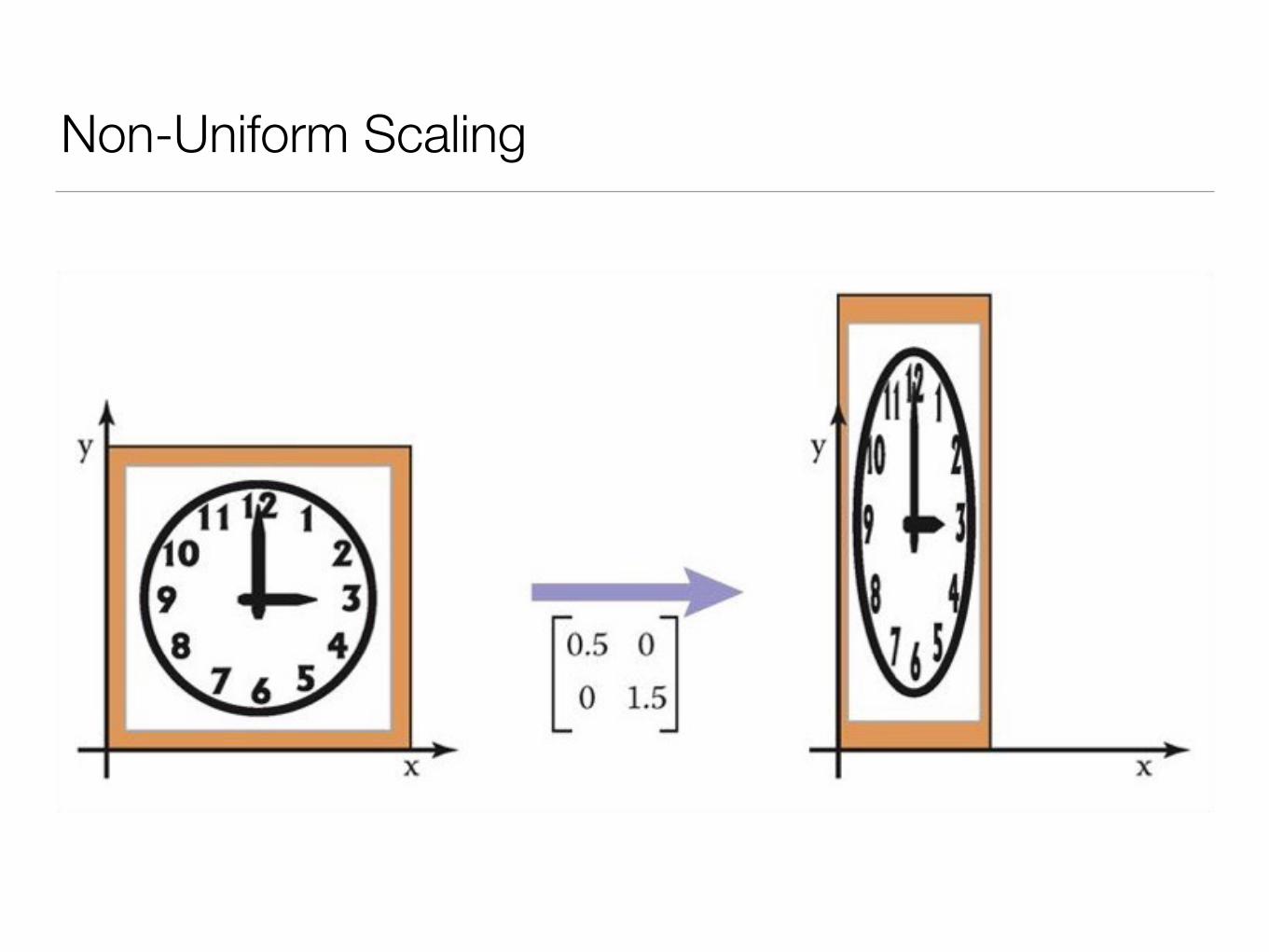
Non-Uniform Scaling

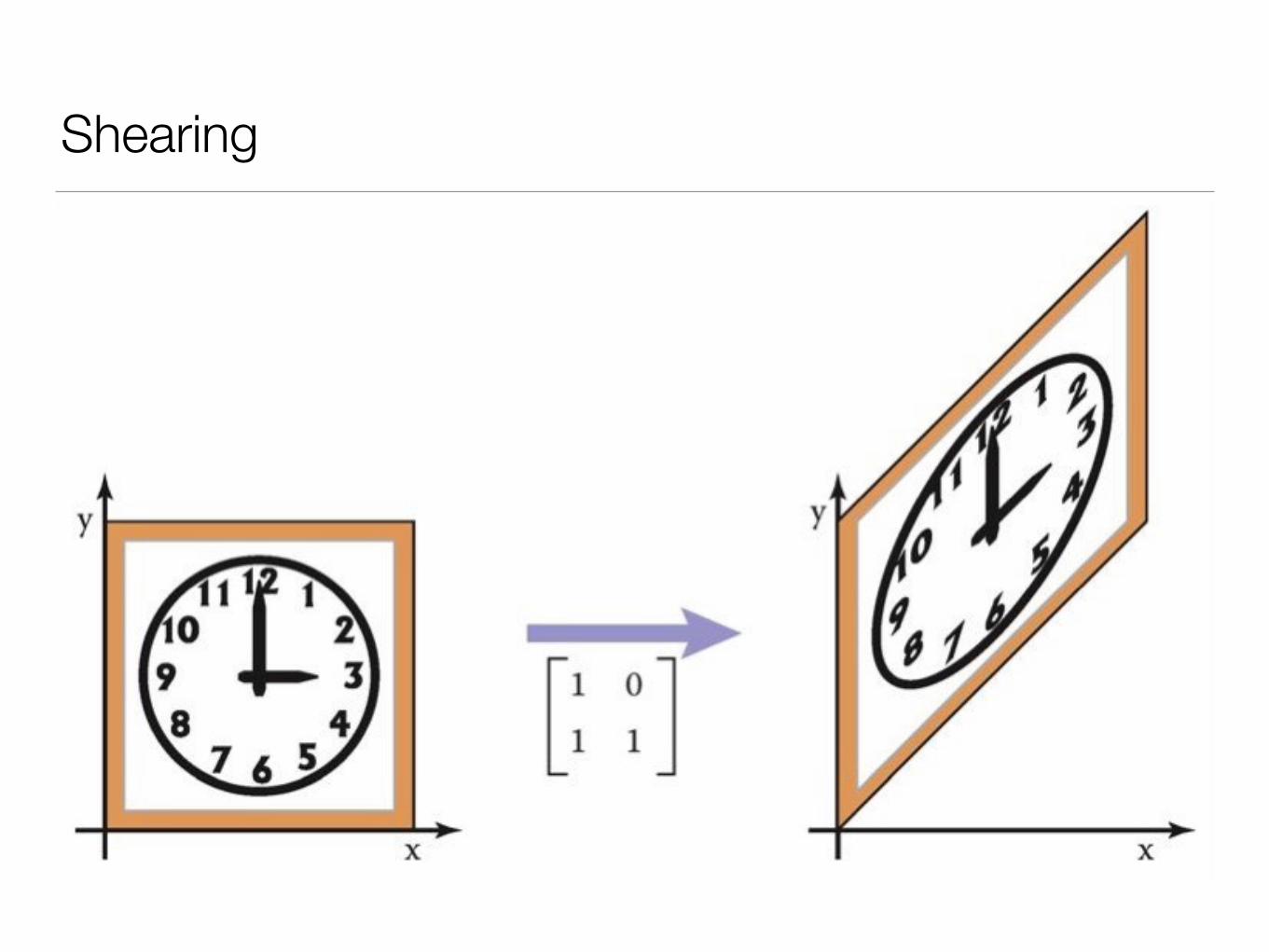
What does this matrix do? M =
1 10 1
�

Shearing
"1 1
0 1
#"1
1
#=
"2
1
#,
"1 1
0 1
#"1
0
#=
"1
0
#,
"1 1
0 1
#"x
y
#=
"x+ y
y
#
Shearing

What does this matrix do? M =
�1 00 1
�

Flipping
"�1 0
0 1
#"x
y
#=
"�x
y
#

Flipping

Composing Transformations
SyR45� =
Sy =
R45� =

When composing transformations,
does order matter?
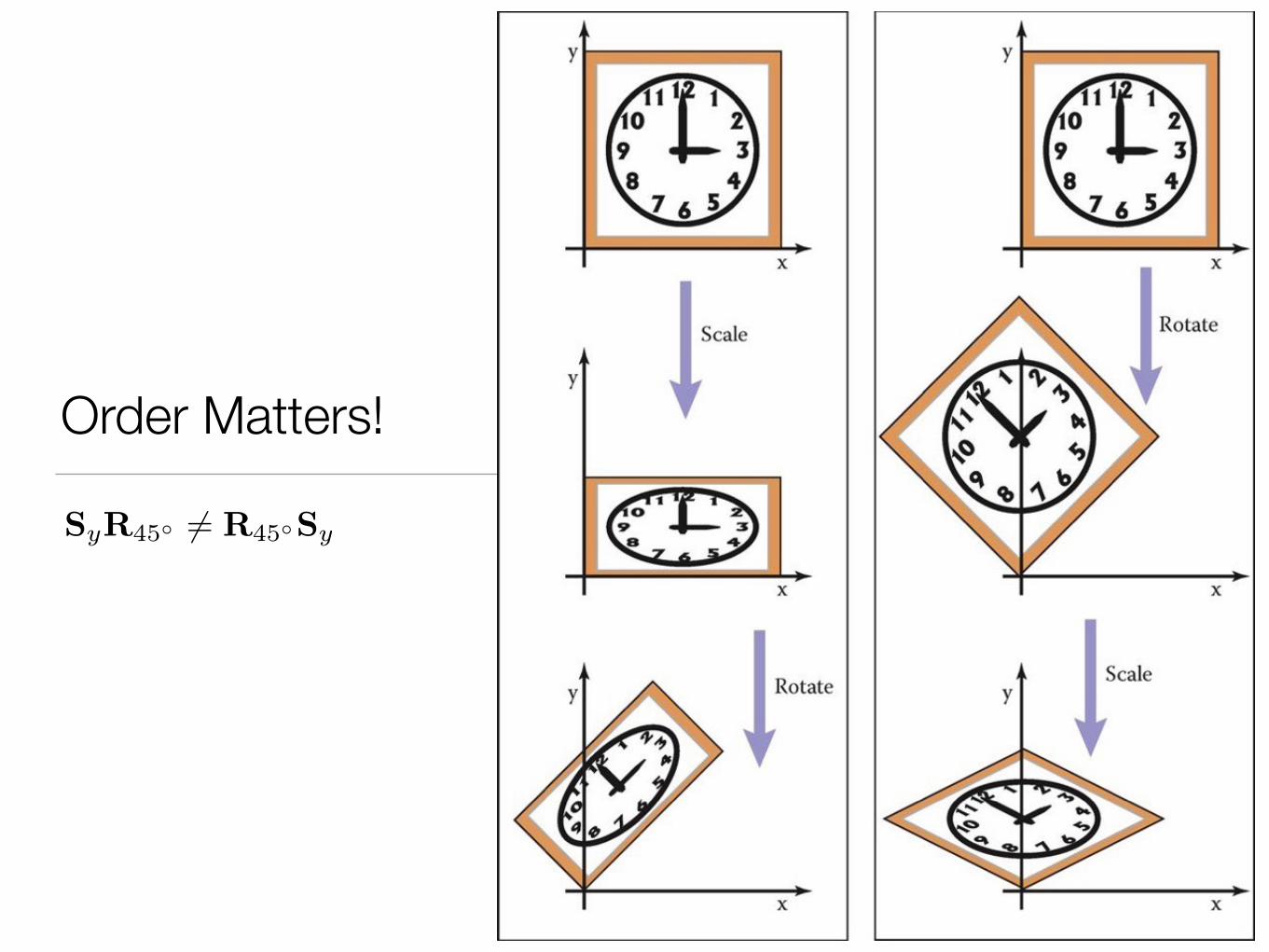
Order Matters!
SyR45� 6= R45�Sy
What about displacements or
translations?
x0 = ax+ by
y0 = cx+ dy
Affine Transforms
• Matrix multiplication gives as a linear transform:
• For translation, we need an affine transform:
x0 = x+ u
y0 = y + v
for M =
a bc d
�
for
uv
�2 R2

Homogeneous Coordinates
• A brilliantly convenient “trick” is to add an extra coordinate to our vectors and matrices:
• The result multiplication gives us an affine transform:
2
4x0
y0
1
3
5 =
2
4a b uc d v0 0 1
3
5
2
4xy1
3
5
x0 = ax+ by + u
y0 = cx+ dy + v

Hold on a second!
ax
ay
bx
by
~v ~v = v1ax + v2ay =
2
4v1v2vh
3
5
If we want [~v]B ) [~v]A ,
then what is vh?

versus
free vectors
bound vectors

Reference Frame Transformations
• Our final homogeneous transformation matrix to go between references frames A and B looks like this:
• Where free vectors and bound (position) vectors are encoded differently:
ATB =
ARB ~rB/A
0 1
�
h~rP/B
i=
2
4r1r21
3
5[~v] =
2
4v1v20
3
5

Things to Remember
• Operations on vectors can be encoded as matrices
• Transforms can be composed by matrix multiplication
- order matters!
• Homogeneous coordinates allow translations to be encoded in matrix form as well
• Free vectors and bound (position) vectors must be encoded differently