







Languages
Pages
Legal

Susanne Biundo, Karen Myers, Kanna Rajan
How is Planning & Scheduling Changing the World?
Susanne Biundo, Karen Myers, Kanna Rajan
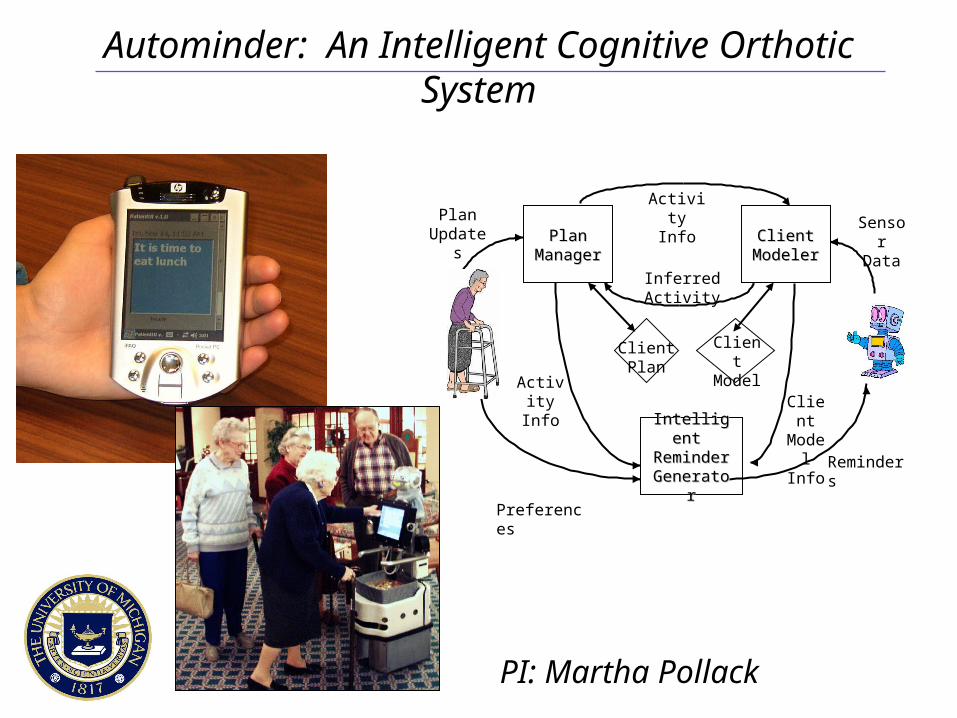
A brief word on the State of the PracticeAutominder: An Intelligent Cognitive Orthotic System
Client Client ModelerModeler
Plan Plan ManagerManager
Intelligent Intelligent Reminder Reminder GeneratorGenerator
ClientPlan
Activity Info
Inferred Activity
Sensor Data
Reminders
Client Model Info
Activity Info
Preferences
Plan Updates
ClientModel
PI: Martha Pollack
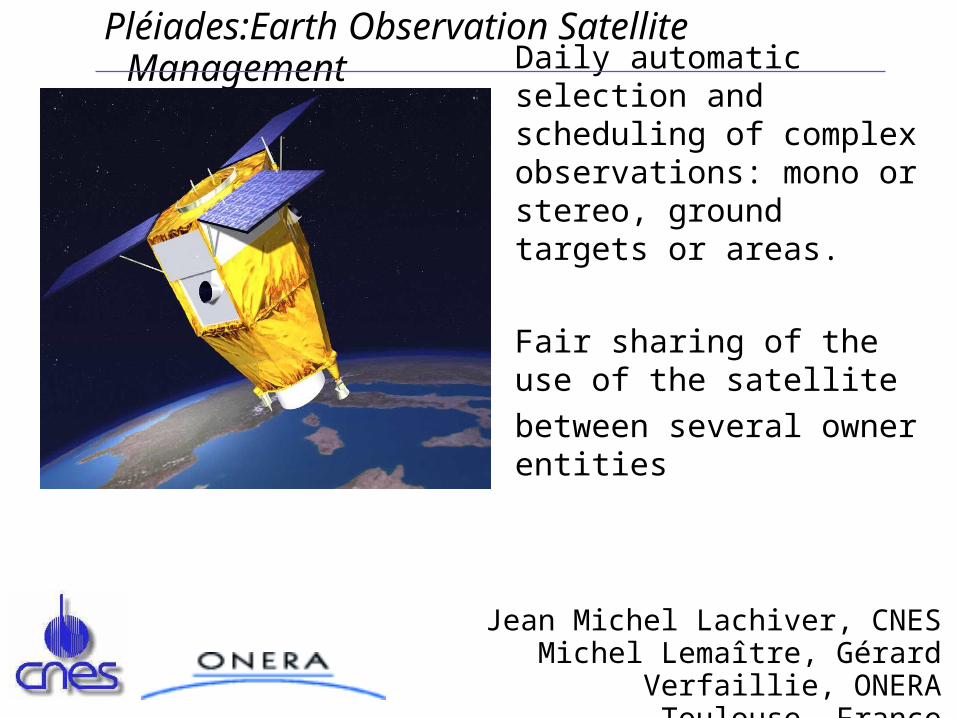
Pléiades:Earth Observation Satellite Management
Daily automatic selection and scheduling of complex observations: mono or stereo, ground targets or areas.
Fair sharing of the use of the satellite
between several owner entities
Jean Michel Lachiver, CNESMichel Lemaître, Gérard Verfaillie, ONERA
Toulouse, France

The AMC Allocator:Advanced Scheduling for US Airforce
•Problem: Day-to-day allocation of aircraft & crews to airlift/tanker missions•Characteristics– Large scale: 1,000s of missions; 100s of assets– Continuous, dynamic stream of mission
requirements
•Core Technology: Incremental, constraint-based search– Rapid gen. of airlift/tanker schedules– Localized revision in response to changing circumstances– Flexible, what-if option generation
•Status: Embedded in AMC’s operational planning system & transitioning into use
DARPADARPACarnegie MellonPI: Steve Smith
Susanne Biundo, Karen Myers, Kanna Rajan
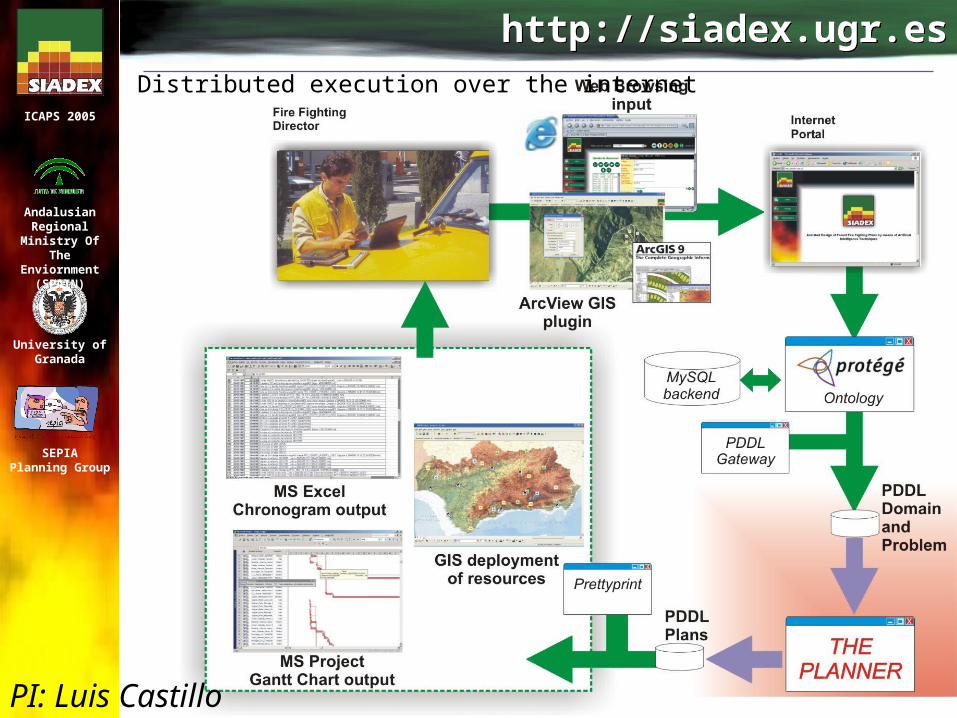
ICAPS 2005
http://siadex.ugr.eshttp://siadex.ugr.es
Andalusian Regional Ministry Of The
Enviornment(SPAIN)
University of Granada
SEPIAPlanning Group
Distributed execution over the internet
PI: Luis Castillo
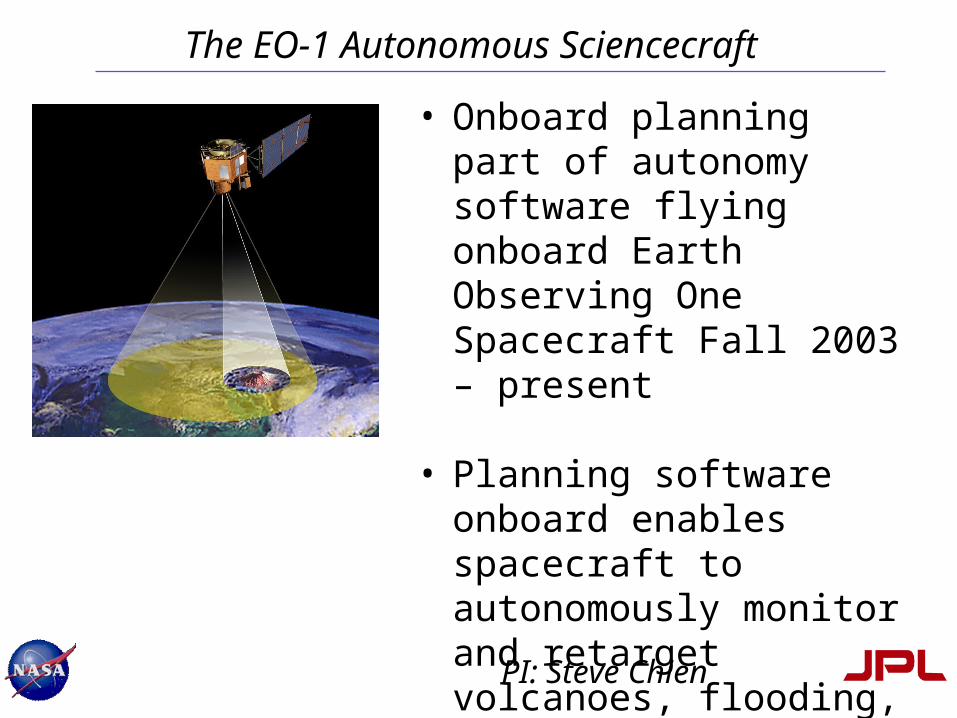
The EO-1 Autonomous Sciencecraft
• Onboard planning part of autonomy software flying onboard Earth Observing One Spacecraft Fall 2003 – present
• Planning software onboard enables spacecraft to autonomously monitor and retarget volcanoes, flooding, cryosphere
PI: Steve Chien

• ASTEP LITA Atacama Field Campaign (Sep-Oct 2004)– Zöe rover with life detecting instruments– On-board planning and autonomous navigation over long
distances
• Rover executive results (preliminary, telemetry still being analyzed)– Total hours of operations (cumulative over several runs):
17 hours– Total distance covered: 16 km– Longest autonomous traverse: 3.3Km 2h 29m– “Roughest traverse”: 1h 2m with 19 faults recovered– Faults addressed:
• Navigator “confused”• Internal processes failed• Early and late arrival at waypoint
Robust Task Execution for Rovers: LITA
Courtesy: Nicola Muscettola
IDEA PI: Nicola Muscettola
Susanne Biundo, Karen Myers, Kanna Rajan
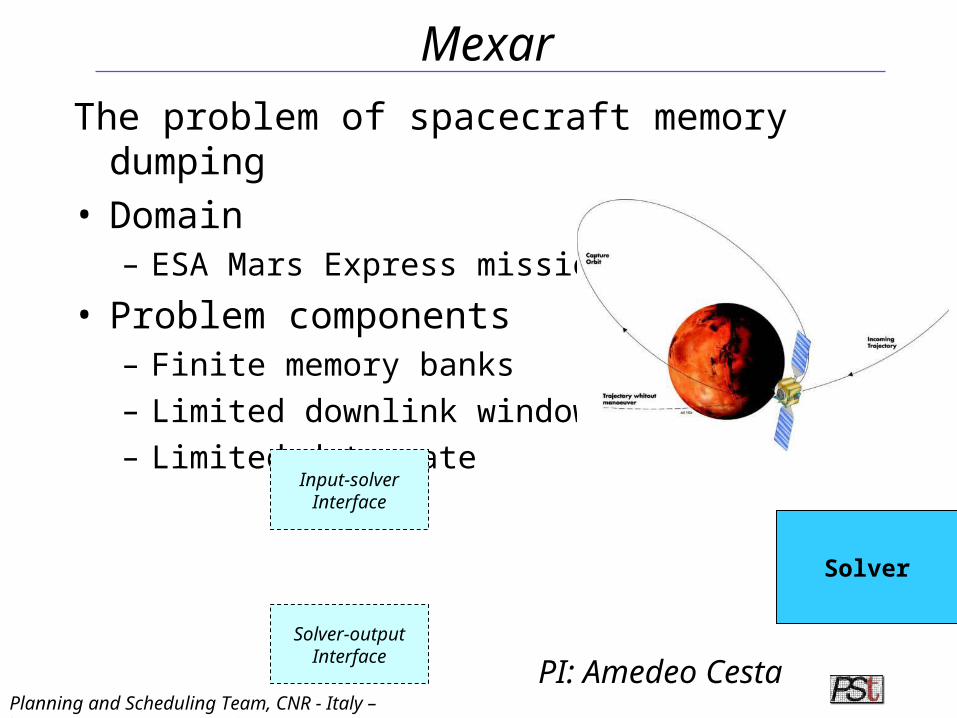
Mexar
The problem of spacecraft memory dumping• Domain
– ESA Mars Express mission
• Problem components– Finite memory banks
– Limited downlink windows
– Limited data rate
Planning and Scheduling Team, CNR - Italy – http://pst.istc.cnr.it
Input-solverInterface
Solver-outputInterface
Solver
PI: Amedeo Cesta

Commanding Spirit & Opportunity with MAPGEN
• Mixed-Initiative ground-based Activity Planning Decision Support system– Generative planning– Plan editing– Constraint formulation and
moves – Deals with time and resources
• First AI based system to command a vehicle on the surface of another planet
• ROI for NASA > 20% for science return in comparision to a manual planning process
PI: Kanna Rajan
Top Related