







Languages
Pages
Legal


Seabed Force Model of
Buried Object Retrieval for
Autonomous Underwater Vehicles
A thesis submitted by
Amy C. Kline
in partial fulfillment of the requirements for the degree of
Master of Science
in
Mechanical Engineering
TUFTS UNIVERSITY
August 2014
ADVISOR:
Dr. Jason Rife, Department of Mechanical Engineering, Tufts University
COMMITTEE MEMBERS:
Dr. Michael Ricard, Draper Laboratory
Dr. Robert Viesca, Department of Civil Engineering, Tufts University
c©2014 Amy Kline, All rights reserved.The author hereby grants to Tufts University and The Charles Stark DraperLaboratory, Inc. permission to reproduce and to distribute publicly paper andelectronic copies of this thesis document in whole or in any part in medium now knownor hereafter created.

Abstract
In order to design autonomous underwater vehicles (AUVs) to manipulate ob-
jects for salvage operations, it is important to characterize forces required for
object extraction. This research models the reaction forces exerted by the ocean
floor during extraction of a partially buried object. A key contribution is the
definition of a reduced-order model for the maximum fluid-suction force on an
object given its dimensions and extraction velocity. The reduced-order model is
verified by comparison to a more refined computational fluid dynamics model.
The thesis also proposes a method to integrate the fluid suction model with
models of soil suction and soil friction, in order to estimate the total extraction
force. The models developed in this work will have utility in designing force and
power requirements for a new class of AUVs, purpose-built for object-retrieval
missions.

Acknowledgements
Thank you to Jason Rife and Michael Ricard for making this research possible
by coordinating with Draper Laboratory and for their constant support over
the past two years. In particular, thank you to Michael Ricard for leading
this project and encouraging me when the research and studies were at their
most challenging. Thank you to Jason Rife for continually pushing me to make
progress on my research and develop effective research and work techniques.
For their feedback on both the research and presentations, I would like to
thank Professor Viesca, Professor Pratap Misra, Rahul Chipalkatty, and the
ASAR lab group. A special thank you to my friends and colleagues at Tufts
and fellow Draper Laboratory Fellows. And finally, I offer the utmost grati-
tude to my family and friends, especially to my husband Joshua, who’s support,
encouragement, and advice were invaluable.

Contents
1 Introduction 2
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Salvage Operations . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Intervention AUVs . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Resistance in Seabed . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.2 Force Overview . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.3 Soil Resistance . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.4 Cavity Formation . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Thesis Contribution . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 Thesis Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Reduced Order Modeling of Suction Force for Uplift of Par-
tially Embedded Cylinder 11
2.1 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 Governing Equations . . . . . . . . . . . . . . . . . . . . . 13
2.1.2 Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.3 Boundary Conditions . . . . . . . . . . . . . . . . . . . . 15
2.1.4 Initial Conditions . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Finite element analysis . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Reduced-order Model . . . . . . . . . . . . . . . . . . . . 22
2.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 Finite Element Model Results . . . . . . . . . . . . . . . . 24
i

2.3.2 Reduced Order Model Calibration . . . . . . . . . . . . . 25
3 Conclusion 28
3.1 Thesis Contributions . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2 Recommendations and Future Research Efforts . . . . . . . . . . 29
A Design of Soil Resistance Module for Support of Environmen-
tal Uplift Model 30
A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
A.2 Soil Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
A.2.1 Soil Friction . . . . . . . . . . . . . . . . . . . . . . . . . . 34
A.2.2 Soil Suction . . . . . . . . . . . . . . . . . . . . . . . . . . 35
A.2.3 Combination . . . . . . . . . . . . . . . . . . . . . . . . . 36
A.3 Results and Discussion . . . . . . . . . . . . . . . . . . . . . . . . 36
A.3.1 Design Implications . . . . . . . . . . . . . . . . . . . . . 38
B Fluid Suction Literature 41
B.0.2 Suction Force for Object Resting on Surface . . . . . . . . 41
B.0.3 Half-Buried Pipeline . . . . . . . . . . . . . . . . . . . . . 54
B.0.4 Seabed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
ii

List of Figures
1.1 Coordinate system and object dimensions for the partially buried
uplift problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Overview of resistance mechanisms in breakout . . . . . . . . . . 6
2.1 Simulation Geometry . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Meshed Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Comparison of the two-dimensional problem and the one-dimensional
approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Pressure Distribution for diameter 0.3 m and depth 0.25 m, . . . 24
2.5 Average Pressure for a cylinder with 0.3 m diameter versus buried
depth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.6 Average pressure for a cylinder with 0.3 m diameter versus uplift
velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Average Pressure for varying characteristic lengths . . . . . . . . 27
A.1 Suction Force Decision . . . . . . . . . . . . . . . . . . . . . . . . 36
A.2 Environmental forces versus uplift velocity . . . . . . . . . . . . 37
A.3 Environmental forces versus uplift velocity over transition zone . 37
A.4 Total environmental forces versus uplift velocity . . . . . . . . . . 38
A.5 Energy comparison for uplift process . . . . . . . . . . . . . . . . 40
iii

List of Tables
2.1 COMSOL Boundary Conditions . . . . . . . . . . . . . . . . . . . 21
2.2 Test Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Set Environmental Parameters . . . . . . . . . . . . . . . . . . . 22
2.4 Average Pressure Fit Equation Coefficients . . . . . . . . . . . . 27
iv

Seabed Force Model of
Buried Object Retrieval for
Autonomous Underwater Vehicles
1
Chapter 1
Introduction
1.1 Motivation
In order to extend the use of autonomous underwater vehicles (AUVs) to buried
object retrieval, it is necessary to first model the extraction process. A significant
amount of research has been performed in both civil and offshore engineering to
understand the interaction between the seabed and foreign objects. There is a
need to leverage the knowledge from the existing research to identify and model
the reaction forces due to both soil resistance and suction.
The primary goal of this thesis is to synthesize an integrated model for the
resistance forces that apply to autonomous extraction of an object from the
seabed, an activity which is sometimes called the breakout problem.
1.2 Background
The advent of unmanned underwater vehicles (UUVs) has forwarded new field
of research in underwater environments previoulsy inaccessible by conventional
manned vessels. They have served many purposes since the Self-Propelled Un-
derwater Research Vehicle was first developed by the Applied Physics Laboratory
at the University of Washington [29].
UUVs are categorized as either remotely operated vehicles (ROVs) or au-
tonomous underwater vehicles (AUVs). ROVs are controlled by an operator on
a nearby ship via a cable [19]. This cable transmits any sensor information, such
2

as video and temperature readings from the ROV and receives power and com-
mands for operations [18]. AUVs require no real-time user input and typically
only perform pre-defined tasks. AUVs have been commonly used for surveillance
missions, such as monitoring of subsea pipelines for the oil industry, while ROVs
are capable of intervention or salvage missions. These missions involve actual
contact with the environment, such as servicing sub-sea stations, and object
manipulation [28].
1.2.1 Salvage Operations
In salvage operations, such as investigation of shipwrecks or plane crashes, both
types of UUVs have been employed. AUVs can be employed to initially survey
a site, identify areas of interest, and collect relevant data for further analysis [8].
Then, ROVs or divers perform necessary tasks, such as retrieving artifacts or
black-boxes. In the case where ROVs are used, the human operator can accu-
rately identify the objects and use manipulators to interact with the environment
and adjust the vehicle as needed.
One example of a salvage mission that successfully used both AUVs and
ROVs, was the recovery of the Air France flight 447 flight data recorder and
cockpit voice recorder. In 2009, the flight from Rio de Janiro, Brazil to Paris,
France crashed in the southern Atlantic Ocean. Although debris from the crash
was identified within days, the initial attempts to locate the crash site and black
boxes were unsuccessful. It was not until April 2011 that the instruments were
successfully recovered. At this phase of the search, three REMUS 6000 AUVs
were first deployed and covered a 6,000 square kilometer area [23]. Once points
of interest were identified, an American Remora 6000 ROV recovered the two
devices within a week.
There are advantages to replacing ROVs with their autonomous counter-
parts. Since an AUV does not require a tether for communication, it is capable
of reaching greater depths, covering greater distances, and executing more com-
plex mission paths than ROVs [19][23]. Also, without the need for a tether and
operator, an AUV can move undetected, making covert operations possible [11].
There are also cost benefits to using AUVs. Individual missions could be ex-
3

tended to days, since there is no restriction of a human operator and a vessel is
only necessary for launch and recovery [22]. Because of these and other possi-
bilities, there is an interest to extend the use of AUVs to independently perform
retrieval missions.
1.2.2 Intervention AUVs
Initial research has been performed to develop intervention AUVs (I-AUVs) [22].
In 1996, the Aerospace Robotics Laboratory at Stanford University and the
Monterey Bay Aqurium Reserach Institute used their semi-autonomous under-
water vehicle called the OTTER to successfully test autonomous retrieval tasks
[28]. These operations included identifying a lighted package, approaching it,
and picking up the instrument using a fixed boom. Challenges for open ocean,
such as currents and seafloor incongruencies were identified but not addressed
[28].
The Semi Autonomous Underwater Vehicle for Intervention Mission (SAUVIM),
developed at the Autonomous Systems Labortory (ASL) at the University of
Hawaii, the Marine Autonomous Systems Engineering, Inc. and the Naval Un-
dersea Warfare Center has the added capability of autonomously using a fully
functional manipulator [30]. In experiments, the ASL has successfully tested the
manipulator by hooking a cable to a submerged object [26].Testing ended once
the object had been hooked and extraction itself was not tested. Because an
intervention mission requires physical contact with the environment, there is a
need to develop a rugged design and a robust manipulator [15].
With the interest and research in I-AUVs to date, fully autonomous opera-
tions will soon be possible; however, to the best of the author’s knowledge no one
has explored the necessary technology for extricating an object in the seafloor.
1.3 Resistance in Seabed
1.3.1 Problem
This thesis focuses on a specific breakout problem in the interest of developing a
unified model that combines forces that can easily be implemented for studying
4

intervention robot applications. The set-up for this problem is shown in figure
1.1. The presented work develops a model for a canonical geometry meant to be
representative of a flight data recorder to be retrieved by an AUV.
Figure 1.1: Coordinate system and object dimensions for the partially burieduplift problem
(a) Coordinate System (b) Dimensions
Specifically, a cylinder with diameter D is modeled. As shown in figure 1.1b,
h(t) is the vertical displacement of the object at time t. The object is initially
buried to a depth of H.
1.3.2 Force Overview
The first step to develop a model of extracting an object from the seabed is to
identify all forces exacted on the object. The resistance mechanisms discussed
in literature are included in figure 1.2.
These mechanisms contribute to the breakout problem:
1. Force due to object weight In any extraction scenario, it is necessary
to move the mass of the object. Typically, with a submerged object only
the effective weight is considered. The effective weight is defined as the
difference between the forces due to gravity and buoyancy. In the case of
this model, only a portion protrudes into the water, while the rest is buried
5

Figure 1.2: Overview of resistance mechanisms in breakout
so it is partially buoyant.
2. Force due to adhesion Adhesion is largely a chemical process in which
the object bonds with the surrounding soil. The extent of adhesion is
dependent on the relationship between the object material and the soil
and the amount of time that the object has been buried. This thesis does
not address adhesion.
3. Force due to soil resistance A force opposing the object’s motion is
created due to the friction between the object and the surrounding soil.
The force of friction is affected by the motion of surrounding soil, which
must be considered.
4. Force due to suction A negative pressure difference develops below the
object to oppose cavity formation. The concept employed here is that
some medium must fill the cavity to avoid creating a vacuum. A significant
resistance can be created by both the surrounding soil and fluid.
1.3.3 Soil Resistance
In order to simulate the retrieval of an object from the seabed, it is necessary
to understand the contributions of the soil surrounding the object. When an
object previously buried either fully or partially is subject to some force, the soil
surrounding the object applies a frictional resistance force. The modeling of the
6
soil resistance present in the uplift problem has been explored extensively for
the static case.
In the U.S. Naval Civil Engineering Laboratory, 1969, Vesic outlined three
different theories regarding the immediate breakout of submerged buried objects
[27]. Immediate breakout is to occur when a force much greater than the weight
of the object is applied so that the object is dislodged in a short period of time.
A large component of resistance originates from any soil overlying the object.
The soil resistance is quantified by the “shearing patterns” formed in the soil
[27].
1.3.4 Cavity Formation
An important aspect to consider in the retrieval of a buried object is the re-
sistance created due to cavity formation. When the object has moved in the
seabed, a void is created in the vacated space. This cavity must be filled by
the surrounding material. Two media are available: the underlying soil and the
water present in the soil pores. In reality, a combination of the two might be
expected in uplift, but no analysis of combined forces has been presented to date
in the open literature.
Soil Suction
Soil suction occurs in the cases where the object has not had enough time or force
to separate from the soil grains. The first instance is commonly referred to as
immediate breakout, when the applied force is able to counteract the maximum
values of all forces resistant to uplift and the object instantaneously is freed
from the seabed. Adhesion, which in itself is a source of resistance, adds to the
likelihood of soil grain movement [25]. The force required to move the underlying
soil is often very high as it must overcome the shear strength of the soil and cause
enough failure to move the soil to vertically fill the gap.
Fluid Suction
The alternative to the soil scenario is that water fills the gap. Since the soil is
considered to be fully saturated, the pores of the soil are filled with water. Once
7

the object moves, water can enter the growing void through the pores, the spaces
between soil grains, along the bottom and sides of the cavity. The fluid initially
originates from the pores directly surrounding the cavity, but it is replaced by
the water flowing from the sea-soil interface and from the soil at greater depths.
Because there is fluid flow through the soil and into the cavity, the cavity pressure
decreases with respect to the seafloor. This pressure difference between the soil
surface and cavity creates the large force that resists the object’s motion. This
force due to negative fluid pressure relative to hydrostatic pressure is termed the
fluid suction force. The fluid suction phenomenon is postulated to occur under
conditions when the object will not adhere to the soil easily and when a long-
term breakout is performed. The long-term breakout allows the fluid enough
time to travel through the soil and into the cavity. Otherwise, the soil would be
required to fill the space.
The majority of soil suction data began with the failure of objects in dry soil
[27]. Fluid pressure is not addressed, even in densely packed soils, because the
pores are filled with air, which is easily compressed. The resistance is negligible
compared to the contributions of the soil [25]. Fluid suction is identified in the
first comprehensive field tests for submerged breakout of objects performed by
Vesic [27].
He illustrates that the pressure difference resulting from the object’s motion
creates a suction force, although he does not offer a model. Lee offers qualitative
effects of pore water pressure when the partially embedded is still attached to
soil below [16].
Fluid suction has been addressed analytically and experimentally in other
cases of submerged objects. The first is the case of an object initially lifted from
the surface of the seabed. This surface suction case is of particular interest in
salvage engineering. The phenomenon occurs when an object, initially resting
on the seabed, is subject to some uplift force or prescribed uplift velocity. The
object experiences some resistance while in contact with the seabed [25]. Once
the object is disloged from the seabed, it rises slowly until it experiences a rapid
motion and only a force equal to the buoyant weight of the object is neces-
sary for further displacement [10] [20]. Breakout also occurs in submerged and
8

ground pipelines. The breakout problem has been pursued in order to improve
pipeline embedment configurations to prevent detachment from the ocean floor
due to large currents. Studies include numerical analyses and experiments on
half-buried pipelines by Foda et. al [9] and experiments run by Law [13] and
on completely buried pipes by Cheng [3]. Also studies on underground pipe dis-
placement in liquified soil have emphasized the effects of a suction force to due
pore water [6][5].
The studies mentioned simplify the breakout problem in most cases focus
on a thin portion of the seabed along the sea-soil interface. Since this analysis
requires a buried cavity, the seabed must be fully modeled, as is done in the
finite element analysis by Jeng to model the seabed to dynamic wave loading
[14]. The literature referenced here is reviewed in depth in appendix B.
1.4 Thesis Contribution
This goal of this thesis is to propose and validate a reduced-order model of the
fluid suction force when lifting a partially buried cylinder.
The two-dimensional model introduced is substituted for a one-dimensional
model that does have an analytical solution. It then shows that the analyti-
cal model’s results match those of the two-dimensional model, given that one
parameter is tuned. A fit for the tunable parameter is computed based on the
relevant geometries of the buried object.
This model has the potential to inform constraints on AUV design imposed
by suction forces and associated extraction times.
1.5 Thesis Overview
The remainder of this thesis is divided into two chapters. The first is concerned
with the fluid suction force and the second summarizes this work and offers
recommendations for future research.
Chapter two begins by reviewing previous research that addresses elements
of the fluid uplift problem. Then, it defines the physics regarding the suction
force created in the retrieval of a partially buried cylinder in a porous seabed.
9

The initial moment of uplift is evaluated through a finite element analysis study
to obtain the pressure profile in the seabed. Finally, the suction force is derived
and a model relating object dimensions, buried depth, extraction velocity, and
the resulting suction force is introduced.
10
Chapter 2
Reduced Order Modeling of Suction
Force for Uplift of Partially Embedded
Cylinder
This chapter quantifies the fluid suction force in the uplift of a partially buried
object. First an overview of relevant and background knowledge is presented.
Then, the results of a finite element analysis are presented. The results com-
pare the suction force results based on each scenario’s cylinder diameter, burial
depth, and uplift velocity. Finally to create a simplified formula for this force,
a regression curve was created in order to integrate a simplified model for the
overall breakout.
A comprehensive model of the coupled flow in the cavity and through the soil
would be computationally expensive so it is beneficial to have a simple algebraic
formula to characterize this aspect of the uplift problem.
Key assumptions of the nature of the seabed and pore water are applied. The
seabed is considered rigid. This constraint is introduced in Mei [20] and greatly
simplifies the problem since the stress and the velocity of the soil skeleton are
ignored. Mei’s analysis is also concerned with the second stage of the uplift
problem, which begins at the point where the object is effectively no longer in
contact with the seabed, even though the cavity has not yet begun to form. As
explained in Sawicki, the first stage ends when the normal stress in soil is zero
11

and any resistance below the object originates solely from the pore fluid [25]. By
neglecting any contraction and expansion of the pores, this assumption ignores
the effects by the soil on the governing fluid equations discussed in section 2.1.1.
This thesis investigates the case of lifting a compact object that is partially
embedded in submerged sand. This scenario is closely related to two similar
scenarios that have been extensively studied in the open literature. Specifically,
these studied cases involve very long partially embedded objects (e.g. an in-
finitely long pipe, with its cross section half embedded in soil) and large objects
resting on the sea floor (e.g. a block on top of sand). To date, few analyses have
considered the forces required to release a compact, partially embedded object.
2.1 Problem Description
The problem of buried uplift is to simulate the fluid pressure on the base of the
cylinder as it rises. The suction force is derived from this pressure profile by
integrating along the face of the object bottom.
Fsuc(t) =
∫ D/2
02πrp(t, r, h)dr (2.1)
where Fsuc is the resulting force from the pressure along the object bottom,
p(t,r,z ) at every radial position r.
It is anticipated that this integrated pressure is highest at the initial moment,
before the cavity forms. Therefore, this value will be determined and used to
characterize the entire process. The initial suction force, can be written as a
function of the seabed pressure. Following equation 2.1, the maximum suction
force is equal to the following:
max (Fsuc) = Fsuc(0) =
∫ D/2
02πrp(0, r,H)dr (2.2)
This is accomplished through finite element analysis, tracking the fluid flow
through the seabed at the initial time step. The model is executed in COMSOL
Multiphysics. By varying the depth and diameter of the object, as well as the
uplift velocity, a correlation between the initial suction force and these parame-
12

ters is determined. This linear system can then be implemented in a model for
the overall breakout.
2.1.1 Governing Equations
The goal is to determine the force in excess of the object’s weight required to
overcome the pressure difference above and below the object. For ease of com-
putation, the object is modeled as a cylinder, reducing the necessary simulation
to a two-dimensional system. The system is shown in figure 1.1a.
Two regions are defined with their own respective governing equations. The
first is the expanding cavity that forms underneath the object that is filled with
water. The second is the seabed surrounding the object. Any water in the cavity
must first travel through the seabed soil. Fluid flow in these coupled regions must
be identified.
This problem requires a combination of the existing knowledge of seabed fluid
dynamics and cavity fluid flow. Unlike the cases referenced in appendix B, the
cavity is completely bounded by soil, allowing no free fluid path into the void.
This complication requires that throughout the uplift process, the pressure and
fluid velocity through the soil be tracked. When coupled, these concepts yield
governing equations for the uplift problem.
Fluid flow in the soil is modeled as flow through an isotropic porous and
permeable media. Several approximations are made for the environment and
the flow continuity.
The first consideration is mass continuity. For mass to be conserved, the
following relationship is true over a given control volume.
∂
∂t(ρ) +∇ · (ρu) = 0 (2.3)
The sum of the rate of change of the fluid density, ρ, with respect to time t and
divergence of the product of density and fluid velocity, u , must be zero.
In soil, fluid is only present in the pores of a control volume. Therefore, the
13

mass continuity is corrected to account for the actual fluid mass in a volume.
∂
∂t(nρ) +∇ · (nρu) = 0 (2.4)
The soil’s porosity, n is the ratio of the pore volume to the total volume. Now,
equation 2.4 is used to characterize the mass continuity of the pore fluid.
The other fluid flow equation that is modified for porous media flow is for the
conservation of momentum. In free flowing fluid, like in the cavity, the velocity
and pressure are related by the Navier-Stokes equation, shown below in equation
2.5.
ρ
(∂u
∂t+ u · ∇u
)= −∇p+ µ∇2u (2.5)
The fluid flow, u , depends on the pore pressure, p, and is characterized by the
fluid’s dynamic viscosity, µ.
The fluid flow equations for the soil is a modified Darcy flow, which is used
for porous media. It accounts for the the change in volume, with the coefficient
n, and an added term to characterize the added fluid flow resistance from the
actual soil structure.
ρn
(∂u
∂t+ u · ∇u
)= −∇p+ µ52 u− µn
κu (2.6)
The last term in equation 2.6 shows that the momentum due to the soil’s resis-
tance is the product of fluid velocity, fluid viscosity, and the soil’s permeability,
κ. Also, it should be noted that the Brinkman term, µn 5
2 u, was included to
account for a transition between free and porous regions. This approach was
employed in Huang’s analysis of the surface uplift process [12].
These partial differential equations are simplified and then employed for the
finite element analysis.
2.1.2 Assumptions
Both the cavity and pore fluid are assumed to be incompressible following Mei
[20] and Foda [10], so the density, ρ, is constant. Since the seabed is assumed
14

both rigid and uniform [20], the porosity n is also a constant. This simplifies
the mass continuity for both free fluid flow and pore fluid flow from equations
2.3 and 2.4 to 2.7.
∇ · u = 0 (2.7)
In all of the models referenced in appendix B, the cavity’s fluid viscous terms
were assumed to be much larger than the inertial terms. Since the inertial
terms are negligible compared to the viscous forces, equation 2.5 is simplified to
equation B.11.
0 = −∇p+ µ∇2u (2.8)
Equation 2.6 is also reduced when the inertial terms are neglected.
0 = ∇ ·[−p+
µ
n52 u
]− µ
κu (2.9)
2.1.3 Boundary Conditions
The boundary conditions at the sea-soil interface are adapted from similar con-
ditions in literature. In Mei [20], the pore pressure is equal to the seafloor’s
ambient pressure. Since the focus of this analysis is the pressure difference
across the seabed, the actual ambient pressure is discounted and is gauged to
zero.
p(t,X > H, 0) = 0 (2.10)
Far from the object, the pore fluid remains undisturbed, even during uplift.
At these points, the fluid velocity is zero and the pressure is hydrostatic. The
hydraulic head, h(t,X,Z), and pore fluid velocity, u (t,X,Z), are set to zero.
h(t,X,Z →∞) = 0
h(t,X → ±∞, Z) = 0
(2.11)
The hydraulic head, h, is defined with a nominal elevation being the sea-soil
interface. Given equation 2.10, the relationship between the hydraulic head and
15

pressure relationship are shown in equation 2.12.
h =p
ρg+ Z (2.12)
The boundary conditions in equations 2.11 can be rewritten in terms of pressure.
p(t,X,Z →∞)→∞
p(t,X → ±∞, Z) = ρgZ
(2.13)
The next set of boundaries pertains to the sides of the cylinder. The bound-
ary of the porous material at the cylinder boundary is considered impermeable,
so the horizontal velocity of the fluid at the cylinder boundary is also zero. Any
interaction between the sides of the object and the surrounding porous media
are neglected in this chapter, and the vertical velocity is also set to zero.
uz(t,D/2, Z) = 0 for 0 < Z < H − h
ux(t,D/2, Z) = 0 for 0 < Z < H − h(2.14)
Although only the initial uplift problem is modeled, the boundary conditions
for a transient cavity are described below in order to derive boundaries on the
seabed region.
The boundary conditions for the cavity are defined in (x,z) coordinates as
shown in figure 1.1a. First, the top of the cavity, which is in contact with
the bottom of the cylinder is assigned a no-slip condition. The fluid’s velocity
matches the velocity of the object itself.
uz(t, x, h) = U
ux(t, x, h) = 0
for 0 < x < D/2
(2.15)
The other boundaries of the cavity correspond to the interfaces with the seabed.
The pressure and volumetric flow rate, Q, are continuous across these boundaries.
Below, the subscripts differentiate between the velocities and pressures for the
16
cavity and seabed. First, the bottom of the cavity has the following conditions.
Qcavity(t, r, 0) = Qseabed(t, r,H)
pcavity(t, r, 0) = pseabed(t, r,H)
for 0 < r < D/2
(2.16)
Since the volume flow rate is a product of the cross section and the normal
fluid velocity, equation 2.16 can be rewritten in terms of fluid velocities and the
cross-sectional areas available for fluid flow for the cavity, Acavity, and seabed,
Aseabed.
Acavityucavity(t, r, 0) = Aseabeduseabed(t, r,H) (2.17)
Again, the area of the fluid for the seabed is dependent on the amount of pore
space in a given volume of soil, namely:
Aseabed = nAcavity (2.18)
If equation 2.18 is combined with equation 2.16 and 2.17, the boundary con-
ditions for the cavity bottom are written in equation 2.19 in terms of velocity,
pressure, and porosity.
ucavity(t, r, 0) = nuseabed(t, r,H)
pcavity(t, r, 0) = pseabed(t, r,H)
for 0 < r < D/2
(2.19)
No boundary conditions are required for the sides of the cavity as they are
irrelevant to problem since the cavity does not yet exist. The cavity height can
be expressed as a function of the time elapsed and the uplift velocity. If the
cavity grows at a rate of U, the height of the cavity,h, at some time td is the
integral of the uplift velocity with respect to time.
h(td) =
∫ td
0U(t)dt (2.20)
Since the desired result of this thesis is a method to determine the maximum
17

suction force exerted on the object only the first time step is modeled. This
is expected to be an overestimate for the entire uplift process. The author’s
reasoning is that at this moment, all fluid must reach the object’s bottom. This
pore water travels the longest path which requires faster velocity through the
soil and therefore the greatest pressure difference.
At the initial moment of uplift, the height of the gap, h, is 0. At this point,
a cavity has not yet formed, and water is drawn exclusively along the bottom of
the object. The boundary conditions and the governing equations of the cavity
are no longer relevant. Boundary conditions defined in equations 2.19 and 2.15
combine to the following.
uz,seabed(0, r,H) = U/n
ux,seabed(0, r,H) = 0
(2.21)
2.1.4 Initial Conditions
Before the object is disturbed, the entire seabed is hydrostatic. The hydraulic
head, h(t,X,Z), and pore fluid velocity, u (t,X,Z), are zero. This condition was
adapted from Jeng’s porous media model for fluid-structure interaction. The
pore pressure is not set to zero, but is instead equal to the dynamic pressure
of the ocean waves [14]. Since any wave motion is neglected, the pressure is
constant at the seafloor, and gauged to zero. This initial condition is consistent
with the boundary condition 2.10.
h(0, X, Z) = 0 (2.22)
The initial conditions of the seabed, equation 2.22 can be written in terms
of pressure using equation 2.12: equation
p(0, X, Z) = ρgZ u(0, X, Z) = 0 (2.23)
The suction force is derived from this pressure profile and is calculated using
equation 2.1.
18

2.2 Methodology
2.2.1 Finite element analysis
To calculate the pressure at the object bottom for the initial uplift, the fluid
flow must be solved for the seabed problem laid out in section 2.1. Since no
analytical solution has yet been found, the problem was modeled and discretely
solved using COMSOL Multiphysics. It was necessary to approximate the
seabed geometry, discretize the geometry, and apply the governing equations on
each element. The simulation set-up is described below.
Geometry
For the simulation, the seabed and cylinder are approximated to a two-dimensional
axisymmetric problem shown in figure 2.1. Because the case is symmetric, only
one half of the cylinder’s geometry requires modeling. The seabed is represented
as a rectangle with set fluid and porous properties. A second rectangle is ex-
truded from the seabed region. This represents a half profile of the cylinder and
seabed. The dimensions of the seabed rectangle are much greater compared to
the half-section of cylinder so that the boundaries applied to the seabed edges
do not affect the cylinder. The seabed geometry was discretized into elements
ranging in size. The size of placement of the elements depend on the location
within the geometry. Along the cavity boundary 6, the elements were set to be
a maximum of 10−4 m, allowing for at most 1,000 nodes along the edge. As can
be seen in figure 2.2, areas farther from the object, such as along boundaries 2
and 3, the element sizes were much larger.
Boundary Conditions
The boundary conditions for the uplift problem described in section 2.1.3 were
adapted for finite element analysis.
Fluid flow is allowed through the soil from the mudline, but has a set pres-
sure. Equation 2.10 is applied at boundary 4 to ensure the pressure remains
constant. The boundary conditions on the far-field boundaries are set based on
the principle that the pore water remains undisturbed at any point far from the
19
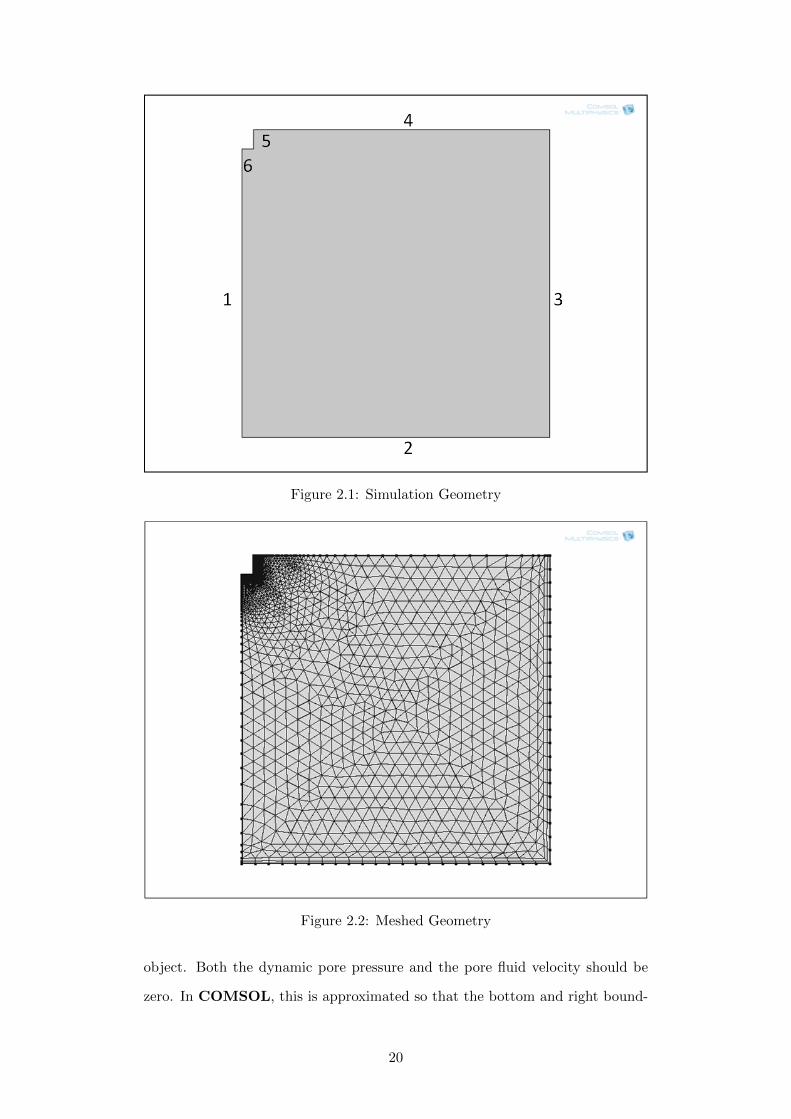
Figure 2.1: Simulation Geometry
Figure 2.2: Meshed Geometry
object. Both the dynamic pore pressure and the pore fluid velocity should be
zero. In COMSOL, this is approximated so that the bottom and right bound-
20

aries, boundaries 2 and 3 in figure 2.1, have a no-slip condition, restricting the
velocity to zero.
An extra boundary condition at the cylinder’s centerline must be included.
Due to symmetry, there are no lateral gradients across the centerline. This
translates to the following three equations at boundary 1:
ux = 0
∇u = 0
∂p
∂x= 0
(2.24)
All boundary conditions are included in table 2.1.
Boundary Description Condition Equation
1 Centerline Symmetric Eqs. 2.24
2 Lower bound of soil(Z→∞)
Set as no-slip u = 0
3 Horizontal soil bound(X→∞)
Set as no-slip u = 0
4 Sea-soil interface Set as inlet with 0dynamic pressure
p = 0
5 Cylinder Side Set velocity u = 0
6 Object bottom Set uplift velocity ux = 0, uz = U/n
Table 2.1: COMSOL Boundary Conditions
The defining condition of the simulation is the uplift velocity. The moving
object bottom, boundary 6, has a set fluid velocity. It includes both a lateral
no-slip condition as well as the vertical outflow equal to the uplift velocity, U.
This condition only applies to the case of initial uplift. In a time-dependent case,
a second region must be included to address the interface between the cavity and
surrounding soil.
Parameters
A series of cylinder diameters were employed to cover a range of potential objects.
The uplift velocity and initial burial depth also have an impact on the suction
created along the bottom of the object, so these were also varied. The complete
list of parameter combinations is displayed in table 2.2.
21

Diameter (m) Initial Depth (m) Velocity (m/s)
0.1 0.2 0.00010.2 0.25 0.00050.3 0.3 0.001
0.35 0.0050.4 0.010.45 0.020.5
Table 2.2: Test Parameters
Environmental Properties
It is necessary to specify both soil and fluid properties. The parameters chosen
for soil porosity and permeability are those used in Mei [20]; however, the sim-
ulation and analysis apply to the range of porosity and permeability applicable
to sand. The simulation constants are included in table 2.3.
Table 2.3: Set Environmental Parameters
Description Value Units
Soil Porosity 0.35
Soil Permeability 1.1213*10−11 m2
Water Viscosity 0.001 Pa-s
Water Density 1000 kg/m3
2.2.2 Reduced-order Model
The finite element model developed is both computationally expensive and would
be difficult to incorporate into a compiled tool for the total breakout problem.
This reduced-order model replaces the partial differential equations with a for-
mula to that produces a relatively accurate solution, one the key length scale is
defined.
To reduce the complexity of the problem, the full two-dimensional set-up of
the seabed, figure 2.3a, is converted to a one-dimensional approximation, shown
in figure 2.3b.
Darcy’s law is employed to adapt the seabed region to mimic a pipe. Since
the suction force is a result of the pressure gradient between the surface of the
22
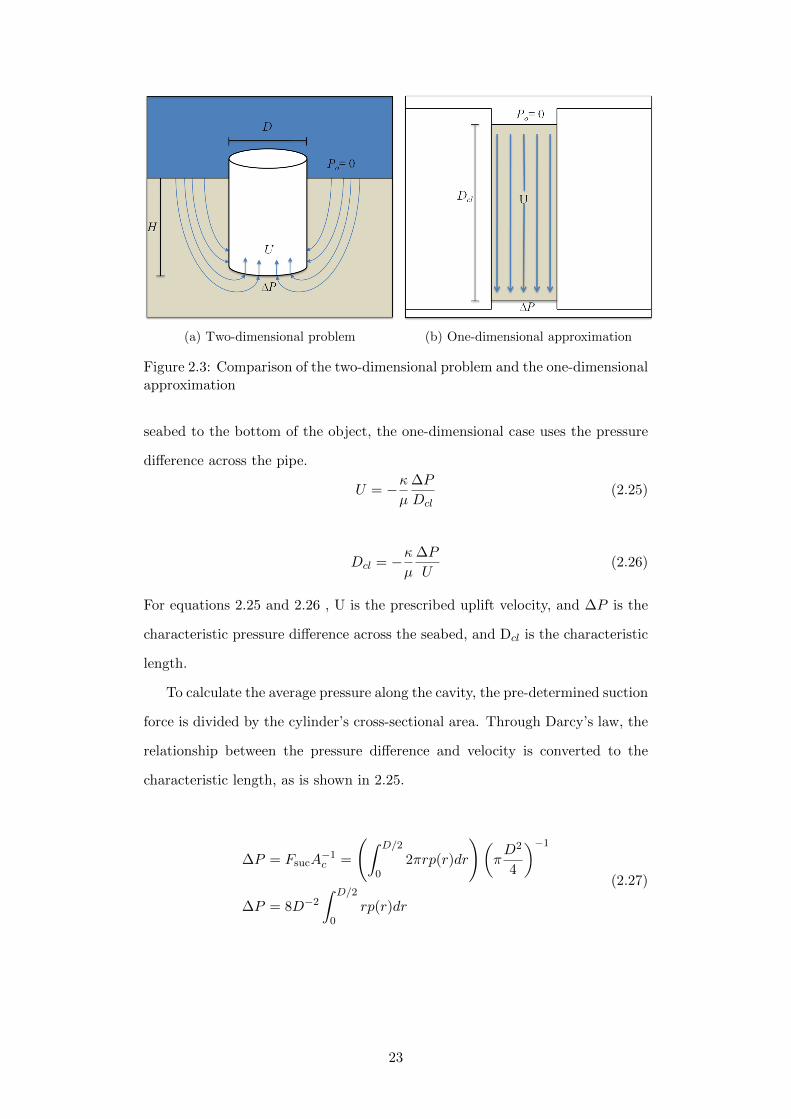
(a) Two-dimensional problem (b) One-dimensional approximation
Figure 2.3: Comparison of the two-dimensional problem and the one-dimensionalapproximation
seabed to the bottom of the object, the one-dimensional case uses the pressure
difference across the pipe.
U = −κµ
∆P
Dcl(2.25)
Dcl = −κµ
∆P
U(2.26)
For equations 2.25 and 2.26 , U is the prescribed uplift velocity, and ∆P is the
characteristic pressure difference across the seabed, and Dcl is the characteristic
length.
To calculate the average pressure along the cavity, the pre-determined suction
force is divided by the cylinder’s cross-sectional area. Through Darcy’s law, the
relationship between the pressure difference and velocity is converted to the
characteristic length, as is shown in 2.25.
∆P = FsucA−1c =
(∫ D/2
02πrp(r)dr
)(πD2
4
)−1
∆P = 8D−2
∫ D/2
0rp(r)dr
(2.27)
23
2.3 Results
The goal of this chapter is to accurately model the initial pore fluid flow and
pressure and obtain a relationship between the extraction velocity and resulting
suction force. The results for the fluid flow model are presented in section 2.3.2
and the results for the suction force correlation are included in section 2.3.1.
2.3.1 Finite Element Model Results
The static finite element analysis outputs the pressure profile and flow field for
the entire seabed. From these results, the suction force was calculated and
related to the object geometry and depth. This section includes examples of the
FEA results and the suction force. It also discusses the trends of the average
pressure.
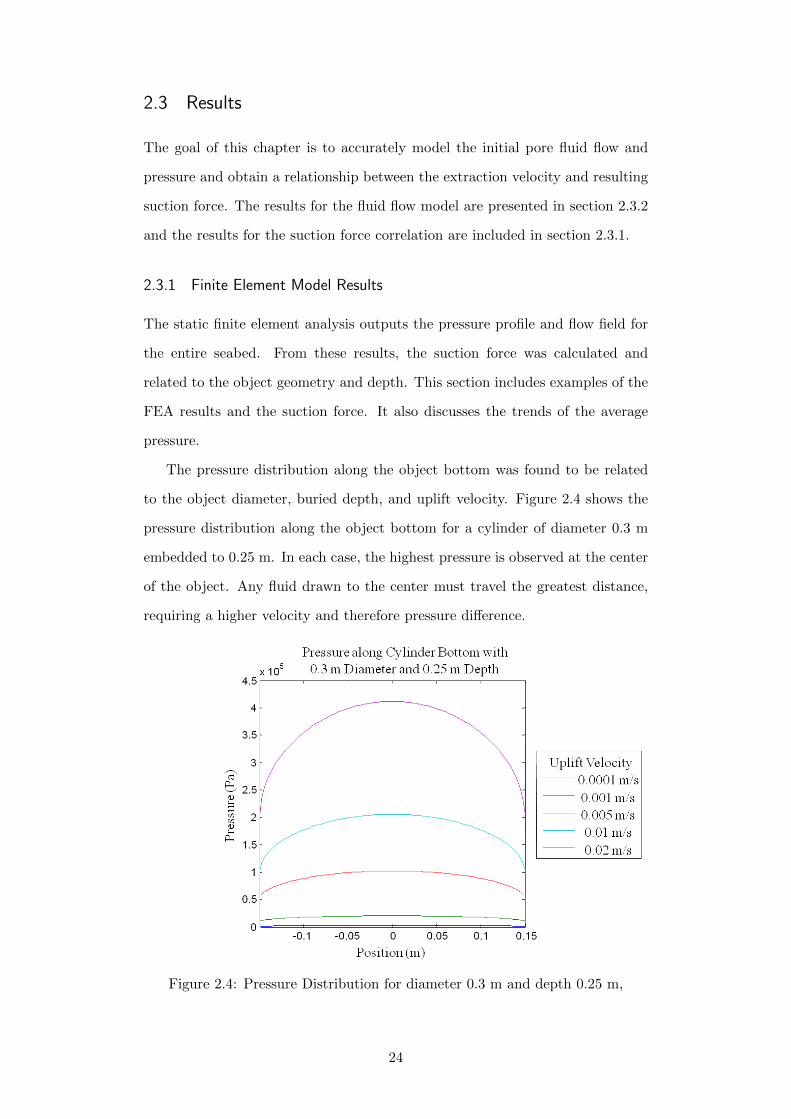
The pressure distribution along the object bottom was found to be related
to the object diameter, buried depth, and uplift velocity. Figure 2.4 shows the
pressure distribution along the object bottom for a cylinder of diameter 0.3 m
embedded to 0.25 m. In each case, the highest pressure is observed at the center
of the object. Any fluid drawn to the center must travel the greatest distance,
requiring a higher velocity and therefore pressure difference.
Figure 2.4: Pressure Distribution for diameter 0.3 m and depth 0.25 m,
24
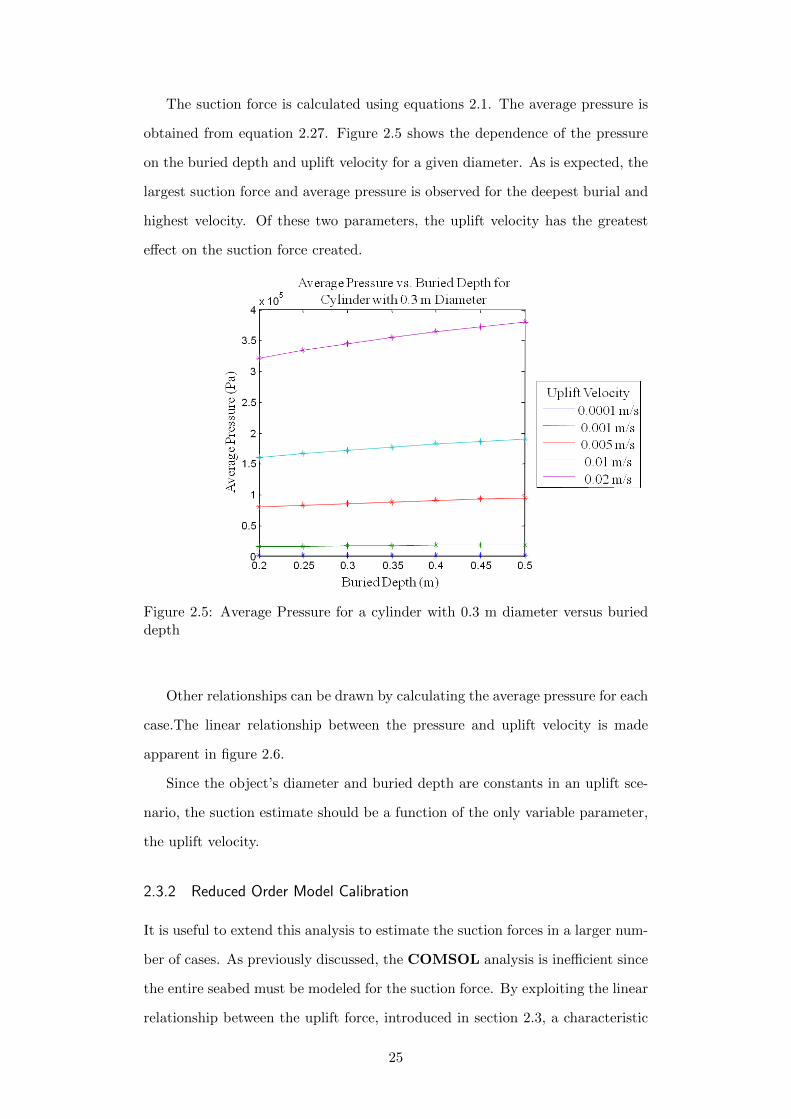
The suction force is calculated using equations 2.1. The average pressure is
obtained from equation 2.27. Figure 2.5 shows the dependence of the pressure
on the buried depth and uplift velocity for a given diameter. As is expected, the
largest suction force and average pressure is observed for the deepest burial and
highest velocity. Of these two parameters, the uplift velocity has the greatest
effect on the suction force created.
Figure 2.5: Average Pressure for a cylinder with 0.3 m diameter versus burieddepth
Other relationships can be drawn by calculating the average pressure for each
case.The linear relationship between the pressure and uplift velocity is made
apparent in figure 2.6.
Since the object’s diameter and buried depth are constants in an uplift sce-
nario, the suction estimate should be a function of the only variable parameter,
the uplift velocity.
2.3.2 Reduced Order Model Calibration
It is useful to extend this analysis to estimate the suction forces in a larger num-
ber of cases. As previously discussed, the COMSOL analysis is inefficient since
the entire seabed must be modeled for the suction force. By exploiting the linear
relationship between the uplift force, introduced in section 2.3, a characteristic
25
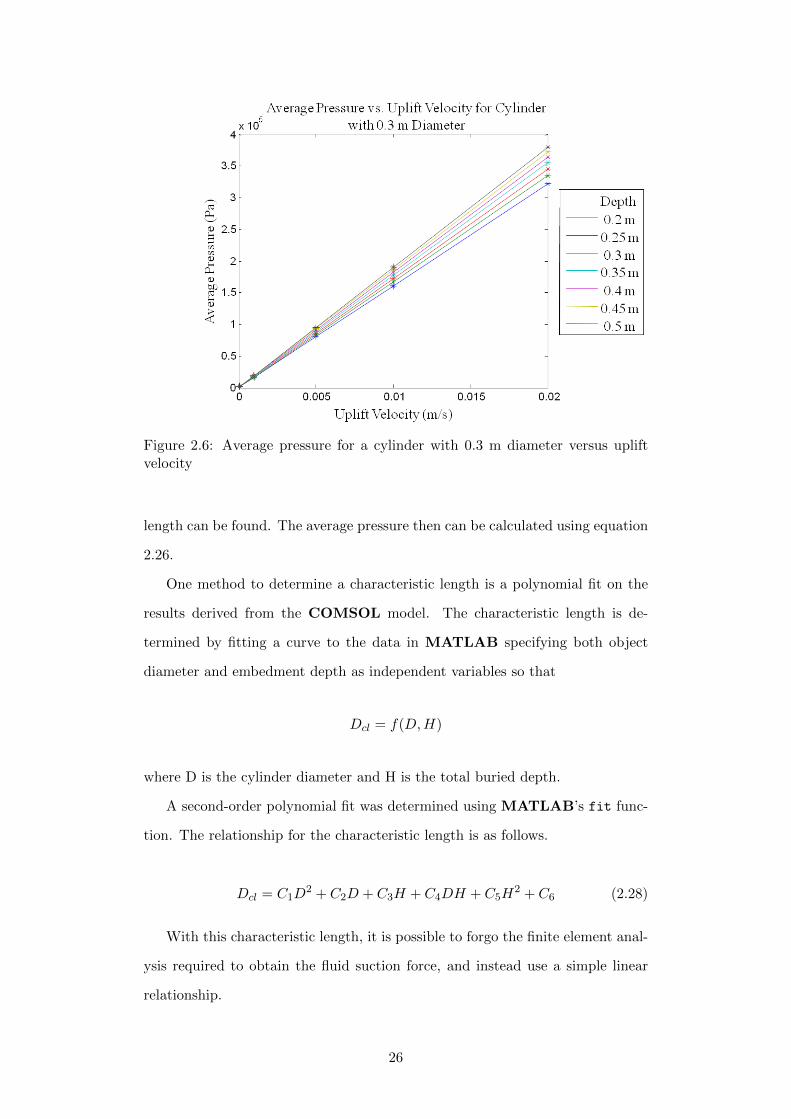
Figure 2.6: Average pressure for a cylinder with 0.3 m diameter versus upliftvelocity
length can be found. The average pressure then can be calculated using equation
2.26.
One method to determine a characteristic length is a polynomial fit on the
results derived from the COMSOL model. The characteristic length is de-
termined by fitting a curve to the data in MATLAB specifying both object
diameter and embedment depth as independent variables so that
Dcl = f(D,H)
where D is the cylinder diameter and H is the total buried depth.
A second-order polynomial fit was determined using MATLAB’s fit func-
tion. The relationship for the characteristic length is as follows.
Dcl = C1D2 + C2D + C3H + C4DH + C5H
2 + C6 (2.28)
With this characteristic length, it is possible to forgo the finite element anal-
ysis required to obtain the fluid suction force, and instead use a simple linear
relationship.
26

Table 2.4: Average Pressure Fit Equation Coefficients
Coefficient Value Units
C1 -0.91 m−1
C2 1.72
C3 0.20
C4 0.96 m−1
C5 -0.25 m−1
C6 - 0.0053 m
Using this characteristic length and equations 2.26, the data in figures 2.5
and 2.6 are incorporated into figure 2.7.
Figure 2.7: Average Pressure for varying characteristic lengths
The average pressure is multiplied by the cylinder’s cross-section to produce
the suction force. This procedure effectively reduces the involved finite element
analysis to three calculations.
27

Chapter 3
Conclusion
3.1 Thesis Contributions
This thesis seeks to enable development of AUV capabilities to execute inter-
vention missions by providing a model of the seabed environment. This work
has addressed challenges associated with an environmental model that would
simulate the conditions necessary for retrieval of a cylinder partially embedded
in the ocean floor.
Specifically, a method to quantify the maximum force created by pore water
pressure was explored. Through the set-up of the uplift problem, the governing
equations of the problem were defined and a stationary problem was solved
utlizing a software finite element method tool. The suction force was calculated
and observations were made regarding the effects of burial depth and object
dimension on the suction force. The key research contribution was a simplified
model of the two-dimensional fluid breakout problem.
The fluid suction force calculated can be incorporated into a comprehen-
sive model to predict the total resistance. A possible method to quantify the
maximum resistance to the breakout problem considering other mechanismsis
included in a subsequent appendix.
28

3.2 Recommendations and Future Research Efforts
While this thesis explores one aspect of the breakout problem, there are many
other elements required to develop a realistic simulation. As the various mecha-
nisms of resistance continue to become better understood, a dynamic simulation
is desirable.
The fluid suction model should be improved to include the evolving suction as
the object is displaced. The updated values could be used to reflect the dynamic
nature of the problem. A solution for fluid suction should be extended beyond
the initial moment of extraction.
A module for soil resistance should be designed that accounts for the discrete
behavior of the surrounding soil. In this thesis, the soil resistance was approxi-
mated and only accounted for the maximum force to the point of failure. It did
not track any soil displacement or varying soil strength. A more sophisticated
model should account for such details as a variable failure surface and transient
soil properties. This opens the simulation to include other object shapes and
different extraction techniques.
The model could be extended to allow for a non-rigid object. It would be
possible to simulate and characterize the impact of extraction process on the
object’s integrity. This addition would advance the utility of the model for less
robust objects than flight data recorders.
Finally, experimental validation to verify the working model would be nec-
essary. The challenge with experiments, as has been noted in several previous
works, is that it is difficult to isolate the contributions of each mechanism. Very
controlled laboratory tests should be developed to verify the total process, before
performing field tests.
29

Appendix A
Design of Soil Resistance Module for
Support of Environmental Uplift Model
A.1 Introduction
In this section, a comprehensive model for the total force resisting the extraction
of an object partially buried in the seafloor is proposed. The various resistance
mechanisms contributing to this force have been identified and are included in
the figure 1.2 free-body diagram.
The forces can be divided into two material groups: the first is the force
associated with the soil’s pore fluid, and the other the soil itself. The forces
due to soil can also be broken down further. Friction from the soil along the
side of the object is present, and can restrict object motion. This mechanism
is emphasized in literature for buried pipelines, foundations, and deep anchors.
Another force is a soil suction force. It serves as an alternative to fluid suction,
where instead of pore fluid filling the gap, underlying soil does. This resistance
from below the object is the focus for cases of shallow buried foundations and
anchors. Calculations for both forces are proposed in this chapter.
This model must incorporate all three forces identified, the fluid suction force,
calculated in chapter 2, the soil suction force, and the soil friction force. These
forces have been studied and quantified individually in other contexts. However,
in these contexts, only one force is considered dominant and the others are
considered negligible.
30
In the case of submerged uplift, it is uncertain how these mechanisms will
interact and if one will dominate. Given that each force is known to operate
in different extreme situations, it would be helpful to identify cases where the
magnitudes are in a similar regime and cases where certain ones dominate.
In this section, a comprehensive model for the total force resisting the ex-
traction of an object partially buried in the seafloor is proposed. First, a soil
resistance calculation is laid out, based on models taken from the literature.
An integrated model is then proposed and the individual forces are compared.
Finally, an example application is presented for AUV design and operation.
A.2 Soil Modeling
Background
In order to simulate the retrieval of an object from the seabed, it is necessary to
understand the contributions of the soil surrounding the object. When a fully or
partially buried object is subject to some force, the soil atop and surrounding the
object applies a frictional resistance force. The modeling of the soil resistance
present in the uplift problem has been explored extensively for the static case.
A great deal of research has been done to quantify the ultimate resistance
to object displacement in soil as well as the amount of force that will induce
soil failure. This problem has been explored for submerged buried anchors,
buried pipelines, and foundation piles. The problem is approached through soil
mechanics principles to quantify the desired uplift capacity. A brief overview
of the past research is explained and then the assumptions and calculations
employed in the simulation are explained.
In the U.S. Naval Civil Engineering Laboratory in 1969, Vesic outlined three
different theories regarding the immediate breakout of submerged buried objects
[27]. Immediate breakout is to occur when a force much greater than the weight
of the object is applied so that the object is dislodged in a short period of time.
A large component of resistance originates from any soil overlying the object.
Vesic differentiates between the two mechanisms but does not seek to assembled
them.
31
Lee [17] reviews other experiments performed by the Naval Civil Engineering
Laboratory, focusing on objects that have been buried to a depth less than
the objects cross-section. The friction along the side of the object is negligible
compared to the soil suction force, but it is noted that it would be reversed for
cases of deeper embedment.
Most approaches for the buried foundation fall under one of two categories:
deep and shallow. As previously explained, each category experiences different
failure mechanisms. In each case, a different type of resistance dominates. For
the deep case, a friction along the sides of the object keeps the object in place:
frictional force. For the other, the main force of resistance is due to the under-
lying soil, in this thesis termed “soil suction”. Meyerhof [21] defines a bearing
capacity formulation based on bearing capacity factors. He notes differences be-
tween deep and shallow foundations including a change in failure surface formu-
lations and also that the dominant resistance differs. He differentiates between
a “base resistance” and skin friction. Both are measured through experimental
data. He also extends work to foundations and performs lab and field loading
experiments.
Rowe and Davis studied anchor plates in sand and clay[24] and performed a
finite element analysis to understand the load-displacement relationship in the
buried case. The formulation accounts for Mohr-Coulomb failure. The descrip-
tions given in Rowe provide insight into types of failure and the mechanisms.
For example, in the case of shallow anchors, the breakout occurs with a rigid
sliding block of soil that rises about the edges of the object. In the case of deep
anchors, plastic deformation is observed. The work included the comparison of
the models and it experimentally found that the actual results fall between the
values resulting from the two limiting conditions.
The deep failure is explored for skin friction. To ensure that the resulting
prediction is an overestimate, deep foundation theory is applied and only dense
sands are considered.
The majority of theories are based on soil mechanics principles. In general,
the measure of peak uplift occurs when the shear stress is equal to the shear
strength of the soil. Most of these methods rely on estimated empirical constants
32

or experimental results.
In 1961, Balla developed a soil mechanics approach that focused on the shape
of slip surfaces for shallow anchor plates in dense sand. He noted the differences
between failure surface based on burial depth and experimentally observed vari-
ous slip surfaces [27]. The distribution of stresses is integrated along slip surface
so that the resistance due to soil shear. In terms of completely buried pipelines,
Cheuk [4] examines existing methods of calculation, referring to both limit equi-
librium and upper bound solutions.
The soil resistance is quantified by the shearing patterns formed in the soil
[27].The soil involved in the uplift extends beyond the area of the buried object,
as was the case in Cheuk’s model tests. Vesic compared these models to field
tests performed in the San Francisco Bay.
Assumptions for Modeling Soil Forces
For the cylindrical object, no overburdened soil exists, so only the portion of soil
lying within the forming slip surface experiences sliding friction. The friction
between the sliding soil surfaces will still occur. With decreasing depth, like in
Cheuk, a lower resistance force is expected as the failure surface shrinks and less
object is in contact with the soil. It is assumed that the maximum force occurs
at the initial instance that uplift begins, as justified by the fact that the object
and soil make their largest (and deepest) contact at this moment in time.
Important principles employed include that with object displacement, the
soil around the object will deform beyond the elastic limit. The plastic region
of the soil is bounded by the slip surface, and the soil outside of this region still
have elastic properties. By moving past this region, soil dilation is neglected and
solely geostatic stresses are applied. If dilatancy is neglected, the stress-dilatancy
theorem developed by Bolton [1] is no longer relevant.
The skin friction requires a coefficient of friction that depends on the rela-
tionship between the object and the surrounding soil. This coefficient, δ will
range between 0 for a perfectly smooth object, and the soil’s angle of internal
friction φ for a rough object.
It uses the shear strength of the soil and extracts the ultimate response.
33

The method assumes a two-dimensional analysis for strain with Mohr-Coulomb
failure criterion.
τ = σ′ tan(φ) + c (A.1)
The shear strength τ is dependent on the angle shearing resistance, φ, the cohe-
sion, c and the effective normal stress σ′.
Calculations
In general, the approaches to calculate the effects of soil strength require refer-
ence to various tables based on foundation and type. This should be completely
based on theoretical settings so that eventually it can be expanded for applica-
tion to arbitrary shapes and other soil properties.
A.2.1 Soil Friction
For this case, an object is buried and completely surrounded by a dense sand.
Any forces exerted by water are assumed to be independent of sliding friction
and, moreover, the effect of pore fluid on shearing forces is assumed negligible
in this model.
For a detailed model, it is necessary to determine the failure patterns of this
soil which vary depending on object shape, soil makeup, and burial depth and
apply some failure law criterion. Similar to the approaches taken for anchors
and pipelines, the soil mechanics can also be applied to the case of foundations
such as piles. The formulas used are a combination of Chattopadhyay [2] and
Deshmukh [7]. This pile approach is set up for dry sands; however this is deemed
applicable since many of the existing studies for submerged cases are derived from
dry cases, including Vesic [27].
The failure surface shape is defined in Chattopadhyay as a torical shape
which is consistent with the work of Balla.
x =d
2+
H
β2tan(45◦ − φ2 )e−β +
H
βtan(45◦ − φ/2)
(Z
H− 1
β
)e−β(1− Z
H) (A.2)
The two parameters used to characterize the frictional behavior are the soil
friction angle φ, and pile friction angle δ. The friction angle between the object
34

and soil are taken into account in the following expression:
β = λ50◦
2δ(A.3)
In these equations, D and H are the object diameter and initial depth respec-
tively. In this case, the variable Z represents the depth where Z=0 is equal to
depth H and Z=H is the sea-soil interface.
Another parameter defined is the slenderness ratio, which has been used to
define whether an embedment is shallow or deep.
λ =D
H(A.4)
Rv = −γπsin(α+ φ)cos(α+ φ)
6cos(α)2
[(H
tan(α)+D
2
)3
+D2
4
(D − 3
(H
tan(α)+D
2
))](A.5)
This soil model must be joined with the suction force components to ensure
a realistic prediction of the uplift process.
A.2.2 Soil Suction
The alternative to water filling the expanding cavity is that soil will be pulled into
the cavity. This phenomenon is mentioned in Lee [16]. Although this method
was used in reference to a cohesive soil, it is applicable for a case when water
cannot drain. Since this case would only occur if the fluid cannot fill the cavity,
it is used. Due to the rapid loading and low permeability, water is prevented
from moving through and soil itself flows.
These calculations follow the same method explained in the prior section.
The difference is the failure surface used. As done in Lee, a Prandtl failure
surface for typical compressive bearing capacity is used [16]. Then, calculate
shear strength and use the resulting bearing capacity as the resistance force due
to soil suction.
35
A.2.3 Combination
The proposed method for determining the overall suction force is based on com-
paring certain forces and conditionally summing them.
It is necessary to decide the suction force used for each calculation. Here, it
is proposed that given a certain extraction velocity, whichever medium requires
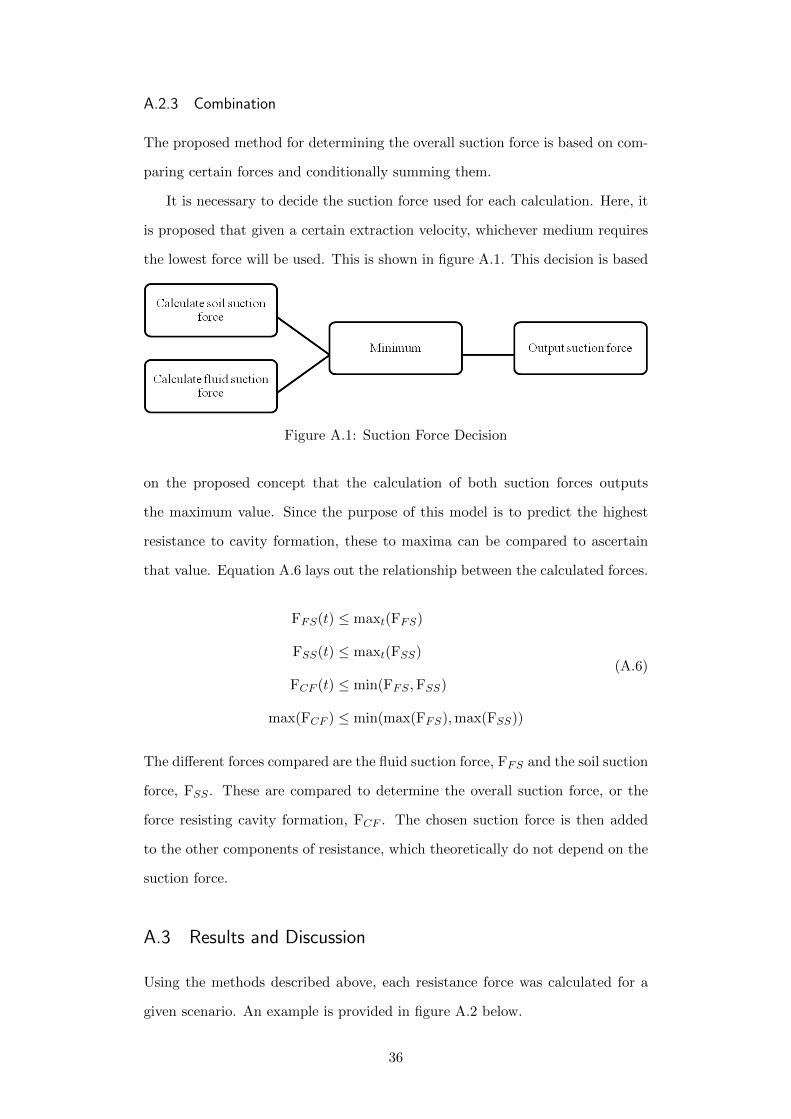
the lowest force will be used. This is shown in figure A.1. This decision is based
Figure A.1: Suction Force Decision
on the proposed concept that the calculation of both suction forces outputs
the maximum value. Since the purpose of this model is to predict the highest
resistance to cavity formation, these to maxima can be compared to ascertain
that value. Equation A.6 lays out the relationship between the calculated forces.
FFS(t) ≤ maxt(FFS)
FSS(t) ≤ maxt(FSS)
FCF (t) ≤ min(FFS ,FSS)
max(FCF ) ≤ min(max(FFS),max(FSS))
(A.6)
The different forces compared are the fluid suction force, FFS and the soil suction
force, FSS . These are compared to determine the overall suction force, or the
force resisting cavity formation, FCF . The chosen suction force is then added
to the other components of resistance, which theoretically do not depend on the
suction force.
A.3 Results and Discussion
Using the methods described above, each resistance force was calculated for a
given scenario. An example is provided in figure A.2 below.
36
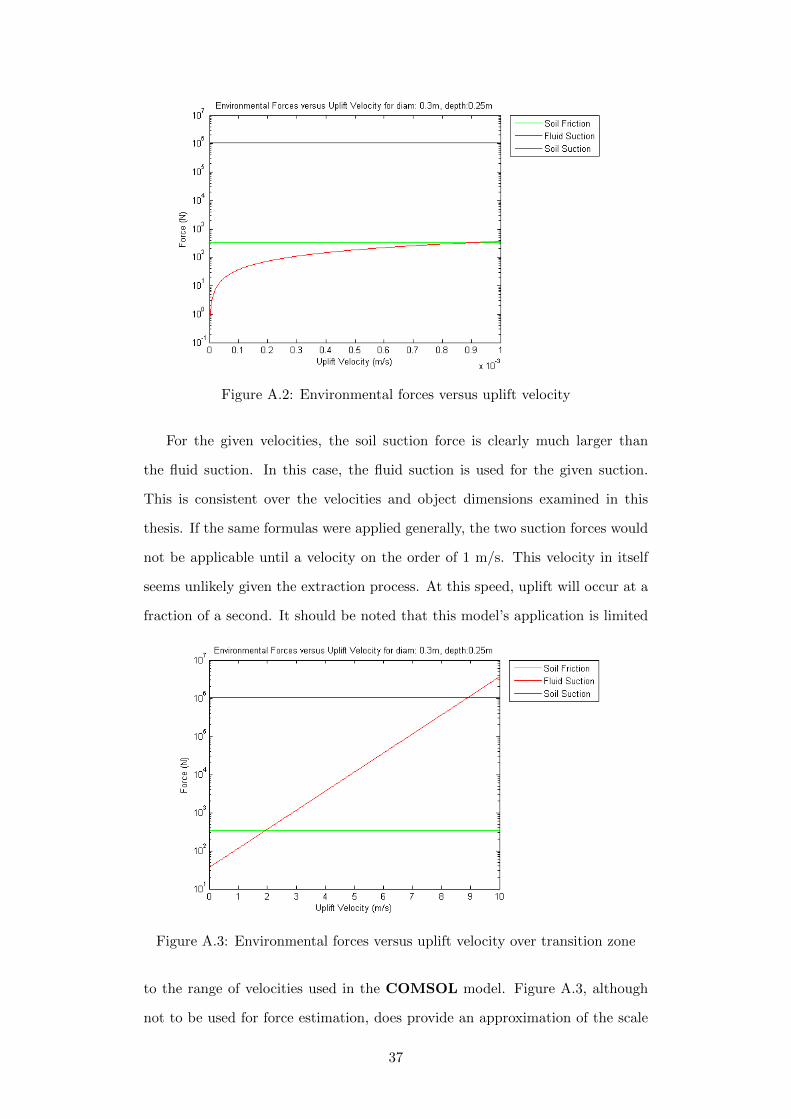
Figure A.2: Environmental forces versus uplift velocity
For the given velocities, the soil suction force is clearly much larger than
the fluid suction. In this case, the fluid suction is used for the given suction.
This is consistent over the velocities and object dimensions examined in this
thesis. If the same formulas were applied generally, the two suction forces would
not be applicable until a velocity on the order of 1 m/s. This velocity in itself
seems unlikely given the extraction process. At this speed, uplift will occur at a
fraction of a second. It should be noted that this model’s application is limited
Figure A.3: Environmental forces versus uplift velocity over transition zone
to the range of velocities used in the COMSOL model. Figure A.3, although
not to be used for force estimation, does provide an approximation of the scale
37

necessary for the two suctions to be on the same magnitude. At this point, the
method proposed in section A.2.3 is not applicable.
These different forces are combined to estimate the maximum resistance to
uplift. In the case used in figure A.2, the fluid suction is taken as the maximum
possible suction force which is then added to the overall friction force.
Figure A.4: Total environmental forces versus uplift velocity
The total resistance ranges over a small interval: from 339.4 N for 10−6
m/s, or 70 hours, to 704.8 N for 10−3m/s, or 4 minutes. This obviously shows
the small variation in force as opposed to the elapsed time of uplift. Although
the model does not address total AUV capabilities, these values can be used to
determine the specifications for the manipulator.
A.3.1 Design Implications
Up to this point, only the force required for extraction has been considered.
Although this provides an estimate of the required capacity of the manipulator,
it neglects the costs of the extraction of the AUV. One such cost is the amount
of energy expended during by the AUV for other necessary tasks such as station-
keeping. It is expensive to keep the AUV for an indefinite period of time. A
generalized formula can be used to compare the contributions of the two factors
to overall energy consumption.
First, extraction energy at any time would be the force applied, F, multiplied
38

by a change in depth, ∆Z.
Ee = F∆Z (A.7)
The extraction energy, Ee , can then be combined with the general operations
energy, Eo , which is calculated in equation A.8.
The energy for general AUV operations is derived from the operating power.
If a constant power is used throughout the uplift process, then the total energy
used will be the product of the power, PAUV and the elapsed time, ∆t.
Eo = PAUV ∆t
Eo = PAUV∆Z
U
(A.8)
The elapsed time can be expressed in terms of the depth, H, and the uplift
velocity, U .
By dividing the sum of the two required energies by the buried depth, ∆Z,
the quantity becomes a function of the total force, F and the uplift velocity U .
Etotal∆Z
=1
∆Z(Ee + Eo)
Etotal∆Z
= F +PAUVU
(A.9)
Figure A.5 is an example of the total energy estimates for various uplift velocities.
For this case, the value used for the operational power of the AUV comes from
the battery capacity and maximum operation time for the REMUS 600 AUV.
It carries a 5.2 kWh Lithium ion battery and has an endurance of up to 70
hours. As the extraction velocity approaches zero, the force and energy required
to remove the object is minimal, but it would require an infinite amount of
operational energy, since the AUV would have to run indefinitely. On the other
end of the spectrum, a great amount of energy is required to lift the object which
greatly exceeds the required operational energy.
Figure A.5 shows the case with an energy minimum around 0.01 m/s where
the extraction and operations energy are equal. This point would be considered
the optimal scenario for the extraction process and manipulator design.
39

Figure A.5: Energy comparison for uplift process
40
Appendix B
Fluid Suction Literature
This appendix provides an indepth review of suction analyses associated with
the fluid suction problem addressed in chapter 2.
B.0.2 Suction Force for Object Resting on Surface
The surface breakout process consists of two stages. The first is the period during
which the object is still in contact with the seabed, experiencing resistance due
to the pore water pressure and any residual adhesion. The second begins when
the object is dislodged and a gap forms between the seabed and the bottom of
the object.
Sawicki Mechanics of the breakout phenomenon [25]
This paper examines the first stage of breakout, when the object is completely
attached to the seabed. The reaction force from the seabed comes from the
negative pore pressure and effective stress created due to the soil’s disturbance.
This three-dimensional analysis determines this pore pressure change along the
bottom of the object by tracking both the fluid flow and normal stresses in
the soil. His approach to solving the pore pressure is to determine the mass
continuity for the fluid in the soil. Each term is then expanded in terms of the
pressure and total stress.
In the seabed, fluid continuity depends on the changing density of the pore
fluid, the changing pore space in the soil, and the transport of the fluid, uf :
41

∂
∂t(nρf ) +∇ · (nρfuf ) = 0 (B.1)
The first term in equation B.1 is the time derivative of the total mass. Both
the fluid density, ρf , and the porosity, n, vary with time as functions of the
strain on the water and soil respectively. The fluid density, ρf varies with the
dynamic pressure of the pore fluid, p:
ρf = ρf0
(1− εf
)εf = −κfp
(B.2)
The fluid density increases with the fluid’s decreasing volumetric strain, εf . A
negative volumetric strain corresponds to the volume of controlled mass shrink-
ing, so relative to its initial density, ρf0 , a higher density is observed.
The volumetric strain is proportional to the changing pressure in the soil.
The soil property affecting the volume of a given mass of fluid is the porosity, n.
The soil porosity is the ratio of free pore space to unit volume of total soil. Like
the fluid density, it also varies based on a volumetric strain. In this instance, it
is the strain on the soil structure itself. Changes in soil volume are caused by
the displacement of the object. Because the object is completely attached to the
seabed, any object movement also expands or contracts the soil, which creates
strain in any dimension. These strains are summed to determine the volumetric
strain, εs. The change in volumetric strain is proportional to the effective stress
imposed on the seabed.
n = n0 + εs(1− n0)
εs = −κsσ′(B.3)
The variable n0 represents the porosity of the undisturbed soil. The volumet-
ric strain depends on both the effective stress, σ′, and the soil’s coefficient of
compressibility, κs.
Another important concept employed in porous media is effective stress. The
normal stress is the total stress experienced by the seabed. The pressure in the
fluid relieves the stress on the soil, subjecting it only to the effective stress.
42

Therefore, the effective stress is the difference between the mean normal stress,
σ, and the pore water pressure, p.
σ′i = σi − p, (i = x, y, z) (B.4)
The second term of equation B.1 uses both of the above definitions as well
as the fluid velocity, uf . Sawicki employs Darcy’s law for the fluid flow, which
states that the velocity in any direction is proportional to the gradient of the
pressure.
uf =k
γw∇p (B.5)
The velocity of pore fluid through soil is dependent on both the hydraulic con-
ductivity, k, a measure of the soil’s ability to allow a soil to flow through its
pores and the unit weight of the pore fluid, γw. Through manipulation of the
continuity equation, B.1, and the above relationships, the following equation is
created to govern the behavior of the stresses and pressure in the seabed.
∇2p− ζ ∂p∂t
= −ξ ∂σ∂t
ζ =γw(κs + n0κ
f )
n0k, ξ =
γwκs
n0k
(B.6)
Two simple cases of uplift are presented in the paper. In each scenario, an
applied force is increased linearly from zero to some value greater than the object
weight that is maintained throughout breakout. The first is a one-dimensional
case where the spatial dependence is reduced to the z directions, only following
changes in depth. The axisymmetric example involves a circular disk of radius
R resting on the seabed. The origin of the coordinate system is at the center of
the disk and the vertical dimension z is aligned with the initial mudline position.
The first step to calculate the suction force is converting equation B.6 into ra-
dial coordinates and simplifying it to reflect axial symmetry. Any lateral stresses
in the soil structure are neglected, σr = 0. Also, since the area of interest for
the pressure is the top of the seabed, the vertical gradient of pressure is also
removed.
1
r
∂
∂r
(r∂p
∂r
)− ζ ∂p
∂t+ ξ
∂σz∂t
= 0 (B.7)
43

In this particular scenario, the vertical normal stress, σz is independent and di-
rectly correlates to the uplift force. At time 0, the vertical normal stress on the
soil skeleton is imposed by the weight of object and any overlying soil. As force
is applied to the object, the weight on the soil is relieved and the stress reduces
until time, T, when a constant maximum force Fmax at which point σ is also
constant. The boundary and initial conditions for this problem are of particular
interest. The dynamic pore pressure is initially set to zero throughout the soil,
neglecting the hydrostatic pressure distribution. Since the object is imperme-
able, the pore pressure gradient is zero at the object-soil interface. Boundaries
not influenced by the process are assigned a zero pore pressure. An unrealistic
imposed condition is that there is only a thin layer of soil underneath the object
as opposed to an infinite half-space to represent the depth of soil.
The solution for pore pressure is obtained using Laplace transforms and ap-
plying the above boundary conditions. To reduce the numerical analysis, the
average pressure, p is manipulated to result in the following functions for pres-
sure in the time periods of increasing force and the constant force.
p(t) = −ξaR2
8
[1− 32
∞∑i=1
1
γ4i
exp
(− γ2
i
ζR2t
)], 0 < t < T (B.8)
p(t) = −4ξaR2∞∑i=1
1
γ4i
exp
(− γ2
i
ζR2t
)×[exp
(− γ2
i
ζR2T
)− 1
], T < t (B.9)
The variables γi and a correspond to the zeros of the Bessel function of the zero
kind and the rate of change of the normal stress respectively. The suction force,
F, is determined from this pore pressure:
F = πR2p(t) (B.10)
Experiments done in this research tracked the displacement of a circular steel
disk under the force described above. The breakout time was measured as rapid
increase in slope of the curve. Two sets of experimental results are presented.
The first is the time history of the applied force and displacement for given
trials, and the second is the correlation between the breakout time and maximum
applied force.
44

This model addresses the changing pore pressure in the soil, but oversimplifies
the environment by assuming the total depth of soil is small compared to the
object, instead of a semi-infinite space. It also provides many helpful details
to boundary conditions and fluid flow in porous media, but since it does not
address the second stage of breakout, it is necessary to consult other sources for
analysis of an expanding cavity.
Foda On the extrication of large objects from the ocean bottom (the breakout
phenomenon), [10]
Foda addresses the second stage of the breakout case of an object pulled from
the seabed at some prescribed velocity, U. This analysis begins when the object
detaches from the seabed and a gap forms between it and the mudline. Just as
in Sawicki, the suction force is the result of the negative pore pressures that form
below the object. Also like Sawicki, the seabed is deformable and rises during
the breakout process.
To extract a solution for the suction force, three distinct regions are modeled.
The first is the gap, bounded by the rising object and a seabed, moving at a rate
of v. The other two models are for the seabed directly below the gap. One is a
general solution, and the other is a boundary layer correction. These regions are
coupled and an analytical solution is obtained. A solution for the axisymmetric
case is then outlined.
This paper gives an approach to model fluid flow in the gap and the applicable
boundary conditions. Key assumptions include that the fluid is incompressible
and the flow is inertial-free. Additionally, because it is considered that breakout
will occur while the gap height is small compared to the width of the object,
lubrication theory is applied; the vertical velocity and the vertical gradient of
pressure across the gap are ignored. The horizontal fluid flow across the gap is
simplified from the Navier-Stokes equation to the following:
∂p
∂i= µ
∂2ui∂i2
,∂p
∂z= 0, (i = x, y) (B.11)
In this case, p is the uniform dynamic pressure of the fluid in the gap, ui is the
45

fluid velocity in direction i, and µ is the dynamic viscosity of the fluid. The
lateral velocities, ux and uy at the top of the gap have a no-slip condition, the
object only moves vertically. The fluid velocity and the pressure are continuous
across the mudline, so this condition must also be satisfied.
The integration of equation B.11 and the application of the appropriate
boundary conditions result in the following velocity profile:
ui = − 1
2µ
∂p0
∂i(∆− η)η + u+
i
(1− η
∆
), (i = x, y) (B.12)
To properly construct this profile, two new variables are introduced to account
for the changing gap height and mudline position. The gap height, ∆, is the
difference between the bottom of the object and the position of the seabed. The
variable η, the relative height of a point in the gap from the mudline. This
helps define the location of the object and soil boundaries. Since the seabed will
experience some displacement, the mudline will not always correspond to the
position z = 0 but it will to η = 0. At this value, the fluid velocity is equal to
the total fluid velocity at the soil-sea interface, u+i . This horizontal velocity at
the soil-sea interface is approximated to zero by Foda, reducing the equation to
just one term. At the height of the object, η = ∆, the horizontal velocity is 0,
corresponding to the no-slip condition at the object’s bottom. The pressure p0
is the dynamic pressure at the seabed. Since lubrication theory is applied, this
value will not change along the height of the gap.
Just as Sawicki employed the principle of mass continuity in the soil, Foda
applies equation B.1 to the gap. Here, since the fluid is incompressible and the
porosity is unity in the gap, the equation reduces to the following:
∇ · (uf ) = 0,
∂ui∂i
+∂uz∂z
= 0, (i = x, y)
(B.13)
This mass balance is then integrated vertically across the gap:
∫ η=∆
η=0
∂uz∂z
dη = −∫ η=∆
η=0
∂ui∂i
dη, (i = x, y) (B.14)
46

The first term involves evaluating the vertical fluid velocity, uz across the gap.
Although the fluid velocity’s vertical component is specifically ignored in lubri-
cation theory, the velocity at both the top and bottom of the gap are defined.
At the top, the fluid moves with the object at the uplift velocity. The fluid
velocity at the bottom of the gap matches vertical velocity, u+z . The other term
is evaluated by inserting equation B.12 into equation B.14.
U − u+z =
1
2µ
∂
∂i
(∂p0
∂i
[1
2∆η2 − 1
3η3
])∣∣∣η=∆
η=0(B.15)
The vertical fluid velocity at the seabed, u+z is now replaced to better represent
the fluid flow in the porous media. As previously explained, the actual soil that
comprises the seabed moves. This solid velocity is represented by the variable
v−z . The total fluid velocity at the sea-soil interface is nominally the soil’s velocity
with an additional velocity, u−z , or the fluid velocity relative to the seabed. The
velocity, u+z , is replaced below in terms of these seabed velocities.
U −[nu−z − (1− n)v−z
]=
1
12µ
∂
∂i
(∆3∂p0
∂i
)(B.16)
To determine for the pressure, p0, it is necessary to also evaluate the velocities,
u−z and v−z . These three variables are further investigated in the soil regions.
The soil model is separated into two parts. The first is a boundary layer where
it is observed that the pore fluid is able to flow more freely than in other areas
and the second is an outer solution where the relative motion between the pore
fluid and soil velocity, u− is considered zero. These models couple with the flow
in the gap by imposing boundary conditions at the mudline. The flow across the
sea-soil interface must be continuous in both velocity and stress. The velocity
component is used in the boundary layer solution, and the stress condition is
satisfied by the general outer solution.
The first derived solution is that of the boundary layer. In this case, the fluid
velocity, u−z is much higher than the solid soil velocity, v−z . Foda’s boundary
layer correction is derived from Biot’s consolidation theorem. . The governing
equations are reproduced below.
47

K∂2pb
∂z2=∂pb
∂t(B.17)
K = k
[n
β+
1− 2ν
2G(1− ν)
]−1
The pressure in the boundary layer, pb depends on both fluid properties as well as
elastic properties of the soil. The variable K consists of the bulk modulus of pore
fluid, β , and the soil shear modulus, G, Poisson’s ratio, ν and permeability, k.
Because the equation is one-dimensional and time-dependent, only one boundary
and initial condition are required for the boundary layer. The dynamic pressure
for the boundary layer, pb, approaches zero at great depths and is initially a
uniform zero through the seabed. The pressure is then found through a Laplace
transform and convolution techniques.
The solution for the general boundary layer pressure in equation B.17 is
found in terms of x,y,z, and t. It does not relate to the actual conditions of the
gap and so it is necessary to introduce the fluid pressure and velocity continuity
across the sea-soil interface. This is done by applying Darcy’s law for the pore
fluid flow. The solution for pb0 is in terms of the fluid velocities, gap height, and
total pressure.
pb0 =−(K/π)1/2
k
∫ t
0
dτ
(t− τ)1/2
[W − v−3 −
1
12µ
∂
∂i
(∆3∂p0
∂i
)](B.18)
The boundary layer pressure at the mudline is added to the solution for the outer
soil problem to produce the total pressure, p0 in the soil.
In the outer layer of soil, the pore fluid moves at the same velocity as the soil
and the pressure of the pore fluid, po, varies with the dilatation, or volumetric
strain, of the soil. This volumetric strain is created by any stresses imposed on
the mudline, τ o.
po0 = − (1− 2νe)β
2(1− νe)nGτ oii, (i = x, y, z) (B.19)
The factors that relate pressure in the outer layer, po, and the stresses in the
soil are characteristics of both the soil and fluid. The effective Poisson’s ratio,
48

νe is an elastic property of the entire saturated structure, both the soil skeleton
and the pores. As velocity continuity was used in the boundary layer, stress
continuity across the sea-soil interface is applied in the outer case. Therefore,
the vertical stresses imposed on the soil originate in the gap.
τ ozi = −p0δzi + µ
(∂ui∂z
+∂uz∂i
)+
, (i = x, y, z) (B.20)
From this condition, Foda further simplifies the outer calculations by reasoning
that the the pressure term, p0, dominates over the shear stresses created from
the fluid, equations B.20 and B.19 can be approximated as follows:
po0 = − (1− 2νe)β
2(1− νe)nGτ o33 =
(1− 2νe)β
2(1− νe)nGp0 (B.21)
Once both the outer layer pressure, po0, and the boundary layer pressure, pb0 are
defined, the total pressure at the interface, p0 can be found. The resulting overall
pressure relationship is fairly complex, so Foda removes the gap height’s spatial
dependence by replacing the gap height, ∆, with its spatial average, ∆.
The method to determine the pressure and ultimately the suction force is
then applied to the breakout case of an axisymmetric object of radius R. For
ease of analysis, the formula for pressure is converted into polar coordinates, as
was done in equation B.7 where z=0 corresponds to the seabed.
p0 = −α∫ t
0(t− τ)−1/2
[∂∆
∂τ− ∆3
12µ
1
r
∂
∂r
(r∂p0
∂r
)]dτ
α =1 +m
m
G/k
π(1− 2ν)m+ π(1−2ν)2(1−ν)
1/2
m =nG
(1− 2ν)β
(B.22)
The term τ in equation B.22 does not correspond to the shear stress in the
seabed, but instead is introduced as part of the convolution used to determine
the pressure in the boundary layer. It is first used in equation B.18 and appears
in the final solution as well. The suction force is the pressure integrated along
49

the cross-sectional area of the object’s base.
F =
∫ R
02πrp0dr
= −απR2
∫ t
0(t− τ)−1/2
[∂∆
∂τ
]dτ +
2παR
12µ
∫ t
0(t− τ)−1/2∆3dτ
∂p0
∂r
∣∣∣R
(B.23)
The only component that still requires calculation is the spatial derivative of
the pressure at the edge of the object, ∂p0∂r |R. To approximate this derivative,
the pressure term is expanded using the Taylor series. The resulting function
for the pressure derivative is constructed with the modified Bessel functions of
the zeroth and first kind, shown below as I0 and I1. All different f function are
functions of time and are satisfied in equation 61 of Foda [10]. The final equation
for the time dependent suction force, F, is dependent on these Bessel functions,
the intermediate functions f0, and the changing average gap height, ∆.
F = −πR2α
∫ t
0
dτ
t− τ)1/2
(d∆
dτ
)[1− 2I1(f0a)
f0RI0(f0R)
](B.24)
f0 is found where
f0 =
√12µ
∆3αH
d∆
dτ, H =
∫ t
0
(d∆
dτ
)dτ
(t− τ)1/2(B.25)
With these formulas, it is possible to determine the changing gap height, and
consequently the object’s position, based on the applied force in excess of the
object’s weight, F or vice versa.
Although this analysis is both thorough and informative, it has been identi-
fied as a complicated process to apply in real-world applications [20], [25]*. In
terms of the current problem, it offers a structure for analysis of the gap but it
does not account for the vertical pressure gradient in soil and therefore shows
incorrect boundary conditions for the gap.
Mei Lifting Large Object from Surface of Seabed, [20]
This paper also focuses on the second stage of extrication. This analysis con-
tinues that of Foda [10]. It is reduced to a two-dimensional problem and many
other assumptions are employed in order to simplify the rigorous computation.
50

Given that the analysis begins once the object is no longer in contact with the
seabed, the seabed is considered rigid. This constraint greatly simplifies the
problem since the stress and the velocity of the soil skeleton are ignored. Based
on experiments, it proves to be a feasible assumption. The fluid flow for the soil
in the gap is now used exclusively as a boundary condition for the gap. As in
Foda, mass balance is used to define the pressure distribution in the gap caused
by the fluid flow and is then analyzed numerically.
The approach to model the expanding gap is similar to that used by Foda.
Both lubrication theory and incompressibility are applied so the velocity profile
is derived from equation B.11. The object’s bottom is again a no-slip surface,
so the horizontal velocity is zero, and the dynamic pressure of the surrounding
water is also zero. The only cavity boundary condition that differs from that
used in Foda is the one for the seabed. Instead of applying velocity continuity
between the gap and the seabed, a partial-slip condition is introduced. Mei
simplifies a condition first developed by Beavers & Joseph that attributes the
slip at the mudline to a thin boundary layer directly below the gap.
∂ux∂z
= αk−1/2(ux − u−x ) (B.26)
The derivative of the horizontal velocity, ux in the gap is proportional to the
difference between the horizontal velocity in the gap and the seabed velocity,
u−x . The constants included are α, an empirical constant based on the porous
material’s structure, and the permeability of the soil,k. Mei neglects the pore
fluid velocity term since it is small compared to the flow in the gap. The fluid
velocity in the gap is then derived as follows:
ux =1
2µ
∂p
∂xz2 −
(h2
2µ
∂p
∂x
)1 + αzκ−1/2
1 + αhκ−1/2(B.27)
The term h replaces the term ∆ to represent the height of the gap. Since the
seabed is considered rigid, the velocity of the mudline, vz is uniformly zero. The
height of the gap is then only dependent on the object’s velocity, U . Equation
B.27 satisfies the flow conditions at both the top and bottom of the gap. At
the top of the gap where z is equal to h, the horizontal velocity is equal zero
51

and it is clear that at the seabed, z equal to 0, the derivative of equation B.27
with respect to the vertical axis is identical to the simplified equation B.26. This
velocity is incorporated into the mass balance of the gap that is explained below.
The continuity equation is constructed following equation B.14 and is then
integrated along the height of the gap as in equation B.15. The variable η is
replaced by the height at any point in the gap,z since η was created for the case
of a moving seabed.
U − u+z = − ∂
∂x
∫ h
0uxdz (B.28)
As in equation B.15, the integrated vertical gradient of velocity is the difference
between the uplift velocity, U, and the velocity of the incoming fluid at the
mudline, u+z . The vertical velocity from the soil is modeled as Darcy’s flow, and
therefore is dependent on the pressure along the bottom of the gap. A stream
function Ψ is also defined related to the pore pressure in the soil.
u− = −κµ∇p = −κ
µ∇×Ψ
u+z = u−z = −κ
µ
∂p
∂z= −κ
µ
∂Ψ
∂x
(B.29)
The pore fluid velocity is then substituted into equation B.28, which is again
integrated but with respect to the lateral dimension, x. The bounds for this
integral are defined for a symmetric object of width L. At the object’s center-
point, xo, the horizontal fluid velocity and pressure gradient are defined as 0.
The value for the stream function is also arbitrarily assigned a value of zero at
the center line.
∫ x
xo
Udx+
∫ x
xo
κ
µ
∂Ψ
∂xdx = −
∫ h
0uxdz
U(x− xo) +κ
µΨ(x) = −
∫ h
0uxdz
(B.30)
Equation B.30 is no longer dependent on the vertical dimension z but it does
have two different seemingly independent variables, p, and Ψ. They are actu-
ally harmonic conjugates so it is possible to rewrite the stream function using
52

Cauchy’s formula in terms of the pressure at the mudline, p(x,0).
Ψ(x, 0) =1
π
∫ L
0
p(x′)d(x′)
x′ − x(B.31)
Both equations B.31 and B.27 are incorporated into equation B.30 to create a
relationship between the uplift velocity, gap height, and gap pressure.
U
(x− 1
2L
)=κ
µ
1
π
∫ L
0
p(x′)d(x′)
x′ − x− ∂p
∂x
h3
2µ
(1
3− 1 + αh/2κ1/2
1 + αh/k1/2
)(B.32)
The numerical analysis that follows non-dimensionalizes equation B.32 to de-
termine the evolving gap height and suction force with respect to time. This
analysis is not relevant as it is strictly a two-dimensional case and is not adapted
to the axisymmetric case. This work includes lab-scale experiments that track
the trajectory of an disk under an uplift force. Breakout time was recorded as
the point at which the height of the object increased asymptotically. The results
provide a correlation between an applied constant force and the breakout time.
The actual velocity and breakout height were not reported. This data can serve
as a check for pressure comparison to the buried case. Mei also extends this
analysis to include extracting an object by tilting it to remove it.
Huang Lifting of a Large Object from a Rigid Porous Seabed [12]
This paper approaches a variation of the surface breakout problem. Instead
of lifting a flat-bottomed object vertically, this set-up tilts the two-dimensional
object along one of its edges, creating a wedged gap under the rotating object.
Mei also adapted the numerical analysis for a wedged gap but Huang applies
different techniques to construct a solution. As the solution is concerned with
the specific case of rotational flow, the solution is not reproduced here, the
environmental modeling is of interest.
The first departure from the previous works is that although the flow in
the gap is modeled as inertial-free and incompressible, it is not simplified with
lubrication theory as is done in both Mei [20] and Foda [10]. Also, like Mei,
the seabed is both rigid and porous . Huang asserts that Darcy’s law cannot
53

properly model the porous media and instead applies the Brinkman equations
to the seabed. Uses a Helmholtz decomposition to divide into rotation and
irrotational components.
Suction Force with Half-buried Pipelines
B.0.3 Half-Buried Pipeline
Another instance of suction is in the breakout of submerged pipelines. These
pipelines are designed to be permanent and robust systems that can be used to
transport resources great distances. Given the harsh nature of the underwater
environment, they must withstand high pressures and extreme temperatures,
as well as any physical stresses from the surrounding environment. This last
point is of particular concern, especially to the installation process. For both
deep-sea and nearshore structures, many conditions can disturb the prescribed
embedment configurations. Of particular concern is wave loading that can induce
lift on these pipelines regardless of their burial depth. The breakout problem
has been pursued in order to improve pipeline embedment configurations. The
modeling approach is of interest to the uplift problem.
Foda Wave-Induced Breakout of Half-buried Marine Pipes [9]
In addition to the unburied breakout case, Foda also investigates the initial
breakout case of half-buried pipelines. For this scenario, an embedded pipeline
can detach from the ocean floor due to large currents and storm conditions.
When the pipeline detaches, a semi-circular gap forms along the bottom half of
the pipeline’s cross-section which is filled from pore fluid from the seabed and
fluid from the edges of the gap. The pressure in this gap contributes to a suction
force that resists the upward motion of the pipeline. This approach contains
similar governing equations for both the gap and seabed to those used for the
surface cases. The paper consists of the problem set-up, numerical analysis, and
experimental results to justify the model. The qualitative observations from the
experiments provide insight into the soil behavior’s response to uplift.
Foda adapts Mei’s rigid porous model by first transforming the system and
applying different boundary conditions. The seabed is also considered rigid
54

porous and any fluid flow between the actual sea and the soil is disregarded
except for the area in the gap. The gap height is still small enough to justify
lubrication theory, but it does not have a uniform thickness along the pipe.
Conformal mapping is applied to transform the non-uniform semi-circular gap
in the (x, z) plane to a half-plane system with coordinates (ξ, η).
d∆o
dt
(ξ − 1
2
)D =
κ
µ
1
π
∫ 1
0
p(x′)d(x′)
x′ − ξ− ∂p
∂ξ
∆3
6µ(B.33)
The coordinate system results in equation B.32, where the variable h is replaced
by the gap height, ∆, U by the rate of change in the largest gap height ∆o. The
width of the object L is replaced by the pipe diameter, D. Also, the last term
of equation B.32 is removed because the pipe system assumes there is no-slip
condition for the horizontal velocity along the seabed. This problem is solved
numerically using the methods described in Mei’s work[20]. Darcy’s law is still
used to model fluid flow from the soil to the gap.
The laboratory experiments were performed by subjecting half-buried pipe,
submerged in a deep tank, subject a variety of wave loadings. A two stage
extrication occurred, similar to that of the unburied case. During the phase
leading to the pipe’s displacement, although there was rippling in the sand,
no soil erosion was observed surrounding the pipe. In the reported results, it
is assumed that breakout resistance was caused exclusively by negative pore
pressure; no solid soil stress from contact was included. This analysis addresses
a cavity that forms surrounded by soil but unfortunately, it neglects the water
flow through the surrounding soil: water could not enter through the seabed to
the left or right of the object.
Law, Initiation of breakout of half-buried submarine pipe from sea bed due to wave
action [13]
Another group of experiments were run by Law [13] in 1996 to investigate the
breakout case of half-buried pipelines under wave-loading. This analysis seeks to
prove an asymmetric gap model is necessary for more accurate wave modeling.
Like Foda [9], Mei’s porous and rigid model is adopted and B.32 is used. Wave
55

forces are idealized as lift and drag forces.
Some important observations from experiments is that breakout occurred in
Mei [20] once the fluid flux from the seabed was comparable to the pore fluid
flux. This does not occur for half-buried pipe in either Foda[9] or Law[13] even
when the sea flux is much larger initially than the pore fluid flux. Law proposes
that breakout is in fact due to passive soil failure around the pipe. The larger gap
created by receding soil relieves the suction pressure. This difference is expected
to be more pronounced for a buried object.
B.0.4 Seabed
Another field of study that influences this work is that of flow to a certain depth
of seabed. Observed for estimating the pressure on buried pipelines and stress
on footings, but not necessarily to analyze the fluid flow in cavities.
Jeng, Response of Porous Seabed to Dynamic Loadings [14]
A concern in offshore engineering is not only the potential uplift of anchored
structures, but their structural integrity under conditions such as earthquakes or
storms. In order to compare the effects of dynamic wave loading on a submerged
structure, Jeng creates a two-dimensional finite element analysis in COMSOL.
Both the unburied and partially buried scenarios are investigated. Unlike prior
models, this study tracks the pressure distribution in the soil, surrounding the
object.
Three regions are incorporated for this system. The first is the sea’s fluid
flow, governed by the Navier-Stoke’s equation. It is controlled by a precscribed
cyclic wave equation. The seabed’s fluid and soil mechanics are modeled by Biot’s
consolidation theorem . And the submerged structure is allowed to elastically
deform. The boundary conditions of the seabed region couple the seabed to the
fluid physics. First, at the mudline, the effective normal and shear stress are
considered zero. The pore pressure is not set to zero, but is instead equal to the
dynamic pressure of the sea. In this case, the dynamic pressure is controlled by
the applied wave or current equation. The other applied boundary conditions
are at great depths of the seabed. The far boundary condition is set to have a
56
zero velocity and pore pressure.
Cheng Seepage force on a pipeline buried in a poroelastic seabed under wave loading
[3]
Cheng offers one approach to modeling a completely buried pipeline. Waves over
the seabed create a displacement on the surface which propagates through the
seabed. Changes in the pore velocity result in a fluid, or seepage, force on the
pipeline. Since the uplift is not initiated, no cavity is formed and therefore, only
the soil environment is investigated.
Like Foda [10], the seabed is modeled as both porous and elastic. From
experiments, it is assumed that there is a pore pressure boundary layer present.
Chian, Effect Soil Conditions [6] and Effect of buried depth and diameter on uplift
of underground structures in liquified soil [5]
Suction forces are not just observed in the marine environment. In urban ar-
eas, underground structures, like pipelines or tunnels, are maintained by three
resistance mechanisms: overlying soil weight, soil shear strength, pore pressure.
These objects may dislodge if the overlying soil loses its strength. Chian [6]
describes that during earthquakes, saturated soil can liquefy and lose its shear
strength. As a result, the structures could potentially displace from an increase
in buoyancy and a decrease in soil resistance. One factor that could mitigate
damaging displacement is the suction force created by the changing pore pres-
sure.
Centrifuge tests are performed on a pipeline buried in saturated sand under
seismic loading. Different soil and pore fluids allow for investigation into the
effect of soil conditions on uplift. Depth of burial and pipe diameter also were
varied for comparison. Pressure transducers installed surrounding the object
and at other positions in the soil record the pore pressure response during the
simulated earthquake.
The results show that voids form below the object and are filled with pore
fluid in cases with highly permeable soil. Another observation made that with
in cases where the soil had high permeability, the excess pore pressure dissipated
57

more quickly because the fluid is able to move with less resistance through the
soil.
58

Bibliography
[1] M.D. Bolton. “The Strength and Dilatancy of Sands”. In: Geotechnique
36 (Volume 36, Issue 1 1986), 65–78(13).
[2] B.C. Chattopadhyay and P.J. Pise. “Uplift Capacity of Piles in Sand”. In:
Journal of Geotechnical Engineering 112.9 (1986), pp. 888–904.
[3] Alexander H.D. Cheng and Philip L.F. Liu. “Seepage Force on a Pipeline
Buried in a Poroelastic Seabed under Wave Loadings”. In: Applied Ocean
Research 8.1 (1986), pp. 22–32.
[4] C. Cheuk, D. White, and M. Bolton. “Uplift Mechanisms of Pipes Buried
in Sand”. In: Journal of Geotechnical and Geoenvironmental Engineering
134.2 (2008), pp. 154–163.
[5] S.C. Chian and S.P.G. Madabhushi. “Effect of Buried Depth and Diameter
on Uplift of Underground Structures in Liquefied Soils”. In: Soil Dynamics
and Earthquake Engineering 41.0 (2012), pp. 181 –190.
[6] Siau Chen Chian and Santana Phani Gopal Madabushi. “Effect of Soil
Conditions on Uplift of Underground Structures in Liquefied Soil”. In:
Journal of Earthquake and Tsunami 06 (2012), p. 1250020.
[7] V.B. Deshmukh, D.M. Dewaikar, and Deepankar Choudhury. “Computa-
tions of Uplift Capacity of Pile Anchors in Cohesionless Soil”. In: Acta
Geotechnica (2010).
[8] B. Fletcher. “UUV Master Plan: A Vision for Navy UUV Development”.
In: OCEANS 2000 MTS/IEEE Conference and Exhibition. Vol. 1. 2000,
65–71 vol.1.
59

[9] M. Foda, J. Chang, and A. Law. “Wave-induced Breakout of Half-buried
Marine Pipes”. In: Journal of Waterway, Port, Coastal, and Ocean Engi-
neering 116.2 (1990), pp. 267–286.
[10] Mostafa A. Foda. “On the Extrication of Large Objects from the Ocean
Bottom (The Breakout Phenomenon)”. In: Journal of Fluid Mechanics 117
(Apr. 1982).
[11] Tim Hardy and Gavin Barlow. “Unmanned Underwater Vehicle (UUV)
Deployment and Retrieval Considerations for Submarines”. In: 9th Inter-
national Naval Engineering Conference and Exhibition. 2008.
[12] Hsueh-mei Huang, Meng-yu Lin, and Liang-hsiung Huang. “Lifting of a
Large Object from a Rigid Porous Seabed”. In: Journal of Hydrodynamics,
Ser. B 22.5 (2010), pp. 106–113.
[13] “Initiation of Breakout of Half-buried Submarine Pipe from Sea Bed due
to Wave Action”. In: Applied Ocean Research 18.2–3 (1996), pp. 129 –135.
[14] Dong-Sheng Jeng et al. “Response of Porous Seabed to Dynamic Load-
ings”. In: Geotechnical Engineering 41.1 (2010), p. 205.
[15] T.W Kim and J Yuh. “Development of a Real-Time Control Architecture
for a Semi-autonomous Underwater Vehicle for Intervention Missions”. In:
Control Engineering Practice 12.12 (2004). Guidance and control of un-
derwater vehicles, pp. 1521 –1530.
[16] Homa Lee. “Breakout of Partially Embedded Objects from Cohesive Seafloor
Soils”. In: Offshore Technology Conference. 1973.
[17] Homa J Lee. Unaided Breakout of Partially Embedded Objects from Cohe-
sive Seafloor Soils. Tech. rep. 1972.
[18] James H. Lever, Gary E. Phetteplace, and Jason C. Weale. Benefits of Us-
ing Remotely Operated Vehicles to Inspect USACE Navigation Structures.
Tech. rep. DTIC Document, 2007.
[19] J.R. McFarlane. “Underwater Technology 2000 ROVs and AUVs: tools for
exploring, exploiting and defending the ocean frontier”. In: Underwater
60

Technology, 2000. UT 00. Proceedings of the 2000 International Sympo-
sium on. 2000, pp. 465–471.
[20] Chiang C. Mei, Ronald W. Yeung, and Ko-Fei Liu. “Lifting of a Large
Object from a Porous Seabed”. In: Journal of Fluid Mechanics 152 (Feb.
1985).
[21] G.G. Meyerhof. “The Ultimate Bearing Capacity of Foudations”. In: Geotechnique
2.4 (1951), pp. 301–332.
[22] Mario Prats et al. “Reconfigurable AUV for Intervention Missions: a case
study on underwater object recovery”. In: Intelligent Service Robotics 5.1
(2012), pp. 19–31.
[23] M. Purcell et al. “Use of REMUS 6000 AUVs in the Search for the Air
France Flight 447”. In: OCEANS 2011. 2011, pp. 1–7.
[24] R.K. Rowe and E.H. Davis. “The Behaviour of Anchor Plates in Clay”. In:
Geotechnique 32.1 (1982), pp. 9–23.
[25] A. Sawicki and J. Mierczynski. “Mechanics of the breakout phenomenon”.
In: Computers and Geotechnics 30.3 (2003), pp. 231–243.
[26] “Underwater Autonomous Manipulation for Intervention Missions (AUVs)”.
In: Ocean Engineering 36.1 (2009). Autonomous Underwater Vehicles,
pp. 15 –23.
[27] Aleksandar S. Vesic. Breakout Resistance of Objects Embedded in Ocean
Bottom. Tech. rep. DTIC Document, 1969.
[28] H.H. Wang, S.M. Rock, and M.J. Lee. “Experiments in Automatic Re-
trieval of Underwater Objects with an AUV”. In: OCEANS ’95. MTS/IEEE.
Challenges of Our Changing Global Environment. Conference Proceedings.
Vol. 1. 1995, 366–373 vol.1.
[29] H.R. Widditsch. SPURV - The First Decade. Tech. rep. ADA050816.
[30] J. Yuh et al. “Design of a Semi-autonomous Underwater Vehicle for Inter-
vention Missions (SAUVIM)”. In: Underwater Technology, 1998. Proceed-
ings of the 1998 International Symposium on. 1998, pp. 63–68.
61