







Languages
Pages
Legal

Rubble Wrestling Robot
What I’ll Be Talking About
• Background• Objective: Design
– Main Power– Tethered– Power Plant– Supplemental Power– Mobility– Physical Shape– Manipulation– Controls– Sensors– Determining Location
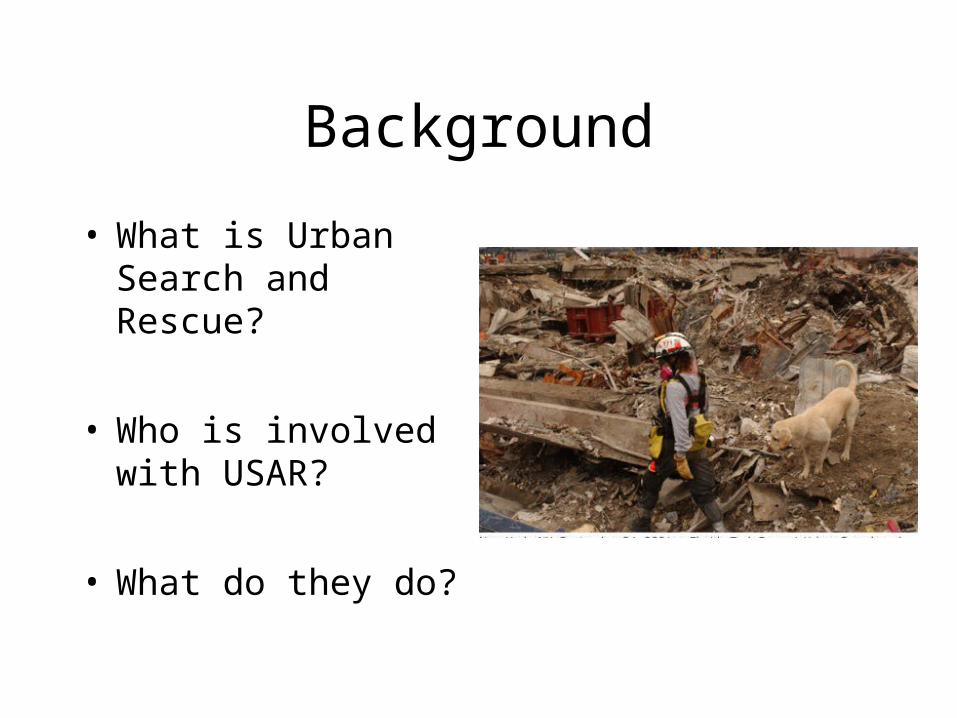
Background
• What is Urban Search and Rescue?
• Who is involved with USAR?
• What do they do?
Objective
• Develop design of robot– Teleoperated
– For use in USAR
– Capable of performing• Victim location, aid
• Rubble clearing
• Shoring
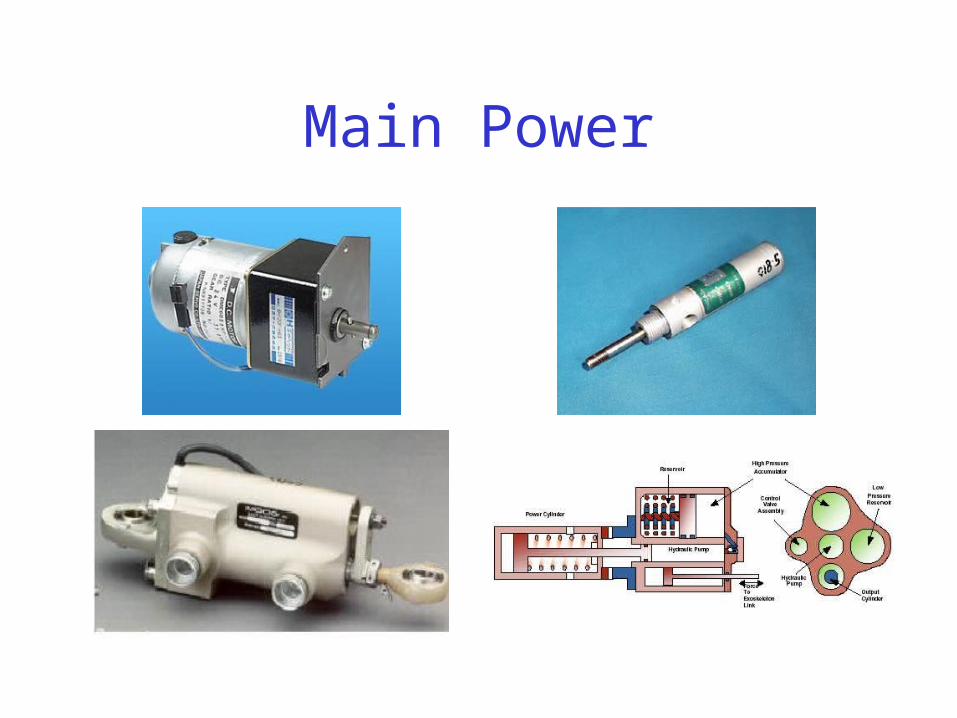
Main Power
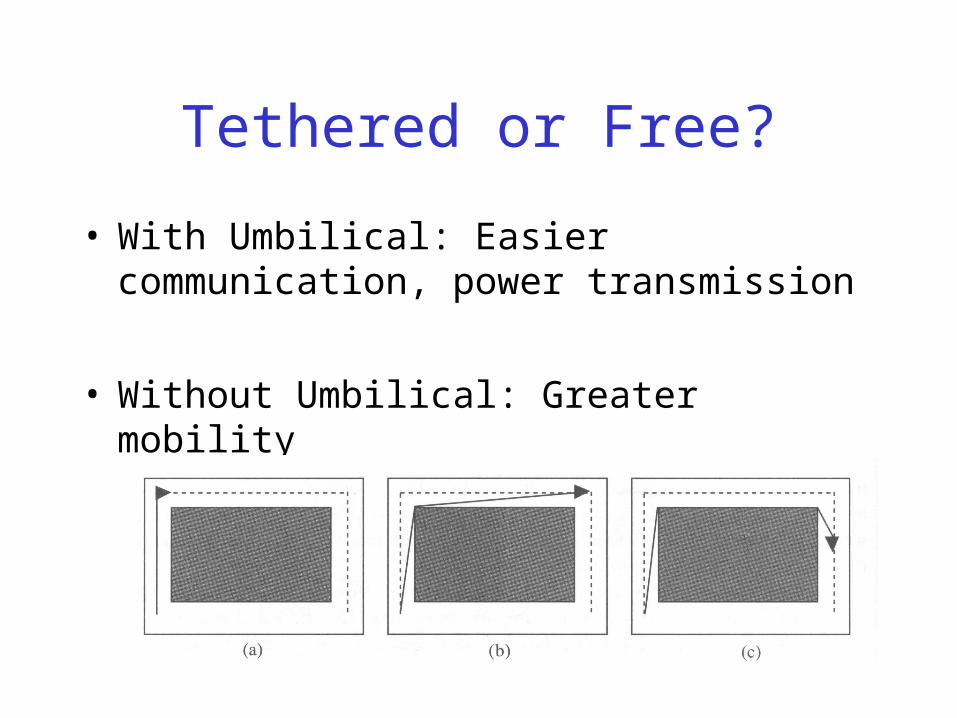
Tethered or Free?
• With Umbilical: Easier communication, power transmission
• Without Umbilical: Greater mobility

Power Plant
• Batteries: Low power density
• HC engine: Emissions, hazardous
• Monopropellant (H2O2, etc.): Good compromise

Hydrogen Peroxide, H2O2
• Advantages– Emits H2O and O2
– Power density
• Disadvantages– 1/3 energy of HC
– Requires 90%+ concentration
– Still developing robot actuators
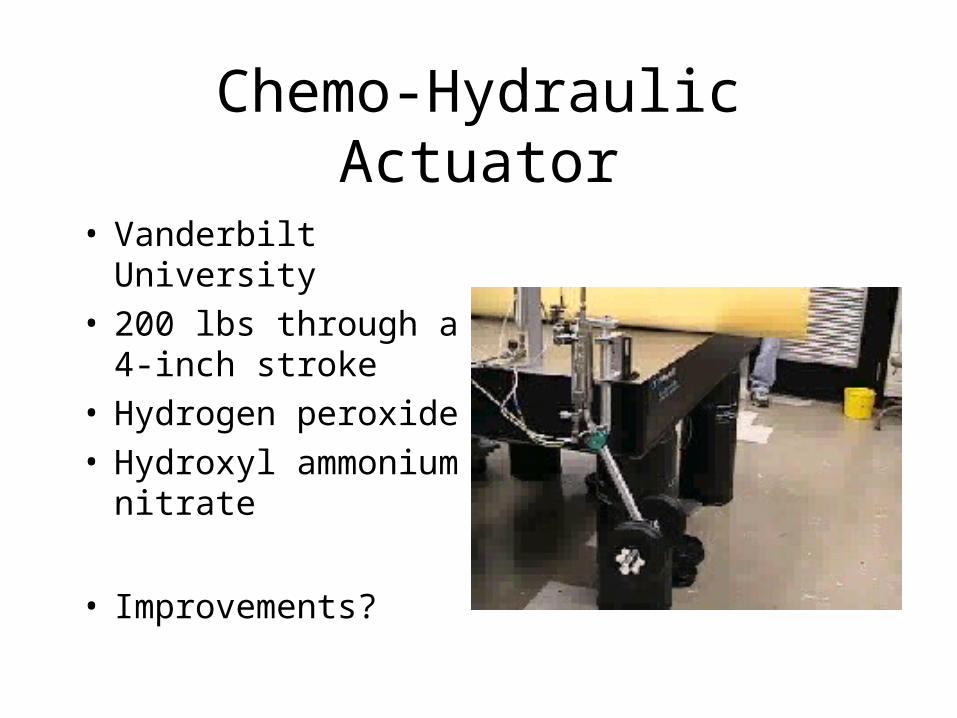
Chemo-Hydraulic Actuator
• Vanderbilt University• 200 lbs through a 4-
inch stroke• Hydrogen peroxide• Hydroxyl ammonium
nitrate
• Improvements?

Supplemental Power
• Required for supporting electronics– Sensors, logic, valve control, etc.– Lights, cameras, communication
• Batteries– Lithium ion– Nimh– Ni-Cad– Lead acid
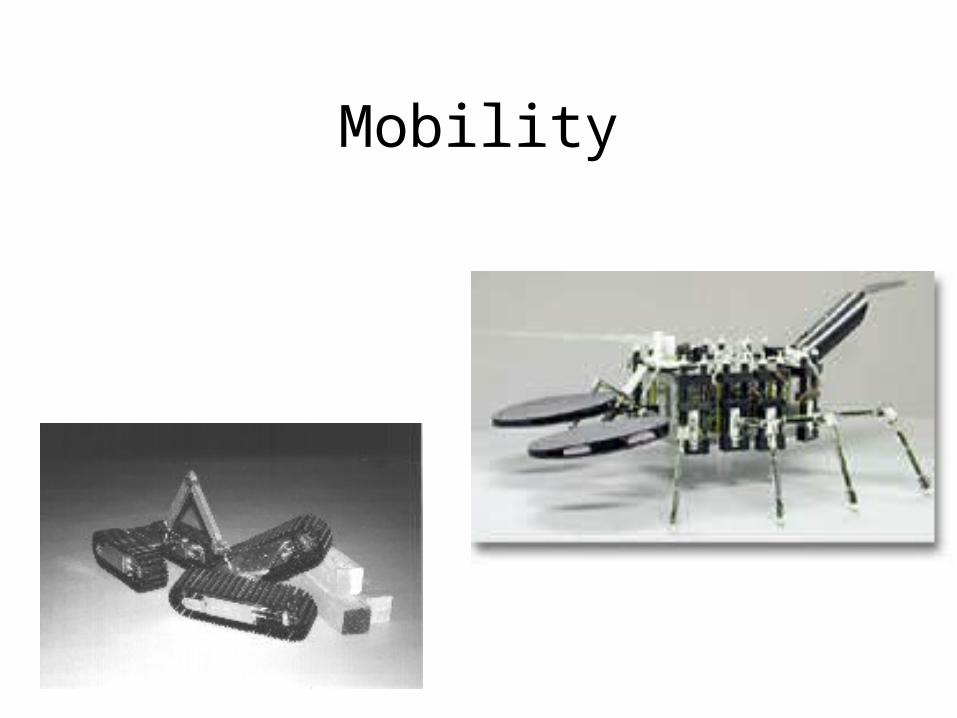
Mobility

Mobility Overview
Hyper-Redundant
• Howie Choset, Carnegie Melon

Snake
• UC Berkeley
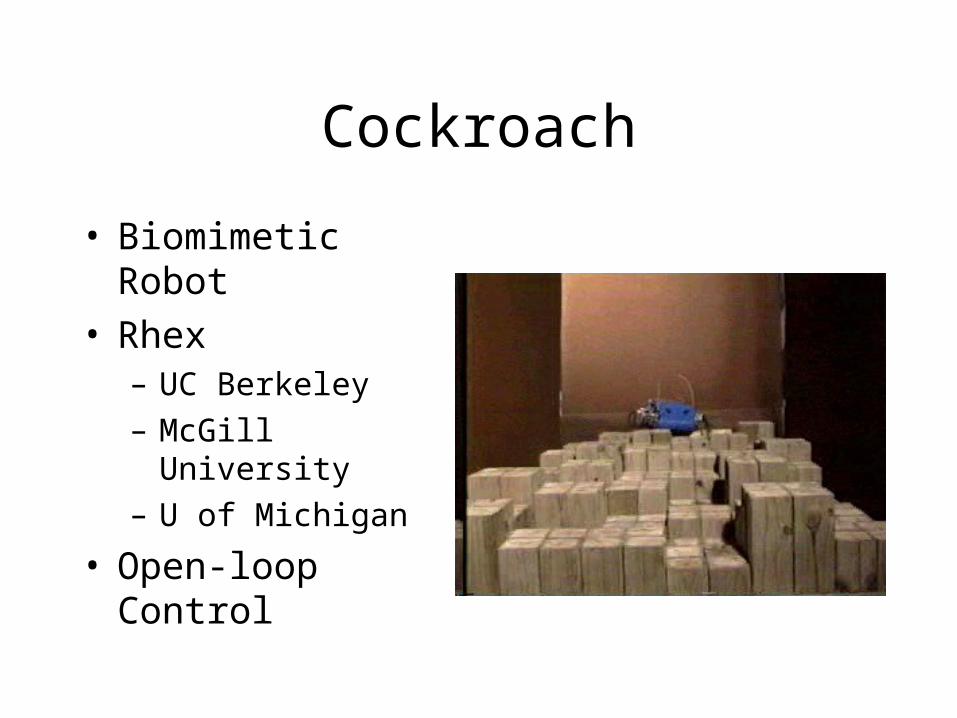
Cockroach
• Biomimetic Robot• Rhex
– UC Berkeley
– McGill University
– U of Michigan
• Open-loop Control
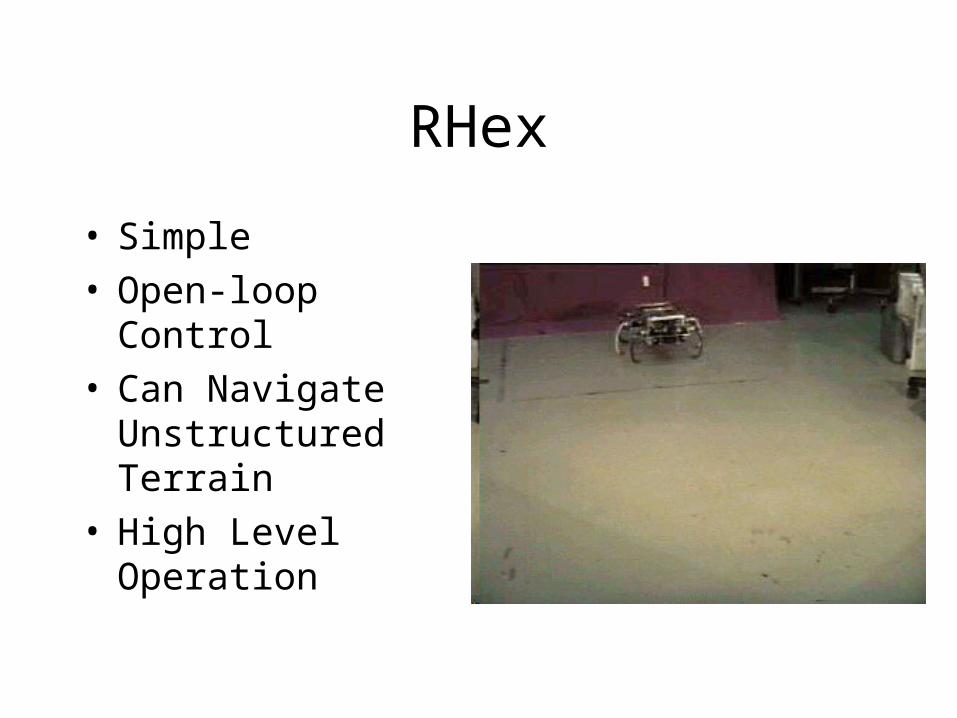
RHex
• Simple• Open-loop Control• Can Navigate
Unstructured Terrain• High Level Operation
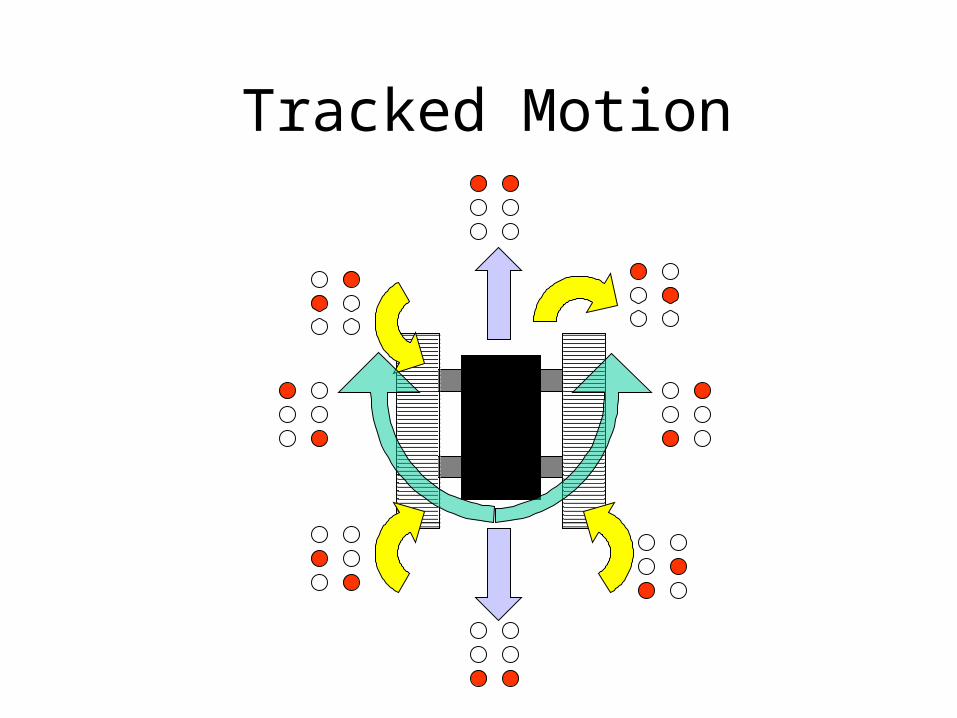
Tracked Motion

Combined Solution
• A hybrid between the snake and cockroach
• Can slither through low clearance
• Has simple high-speed mobility in the open
• Can navigate unstructured terrain
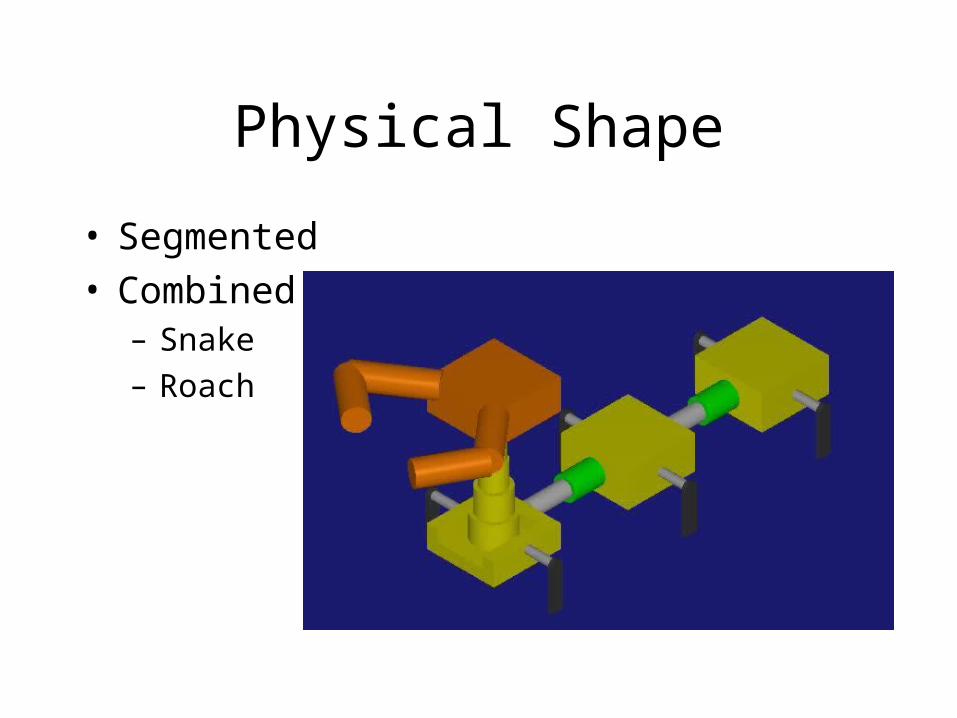
Physical Shape
• Segmented• Combined
– Snake
– Roach

Rubble Manipulation
• Grippers on Collapsible Arms

Controls
• Individual?• Manual
– Gross motor control
– Fine
• Pedal
• Voice
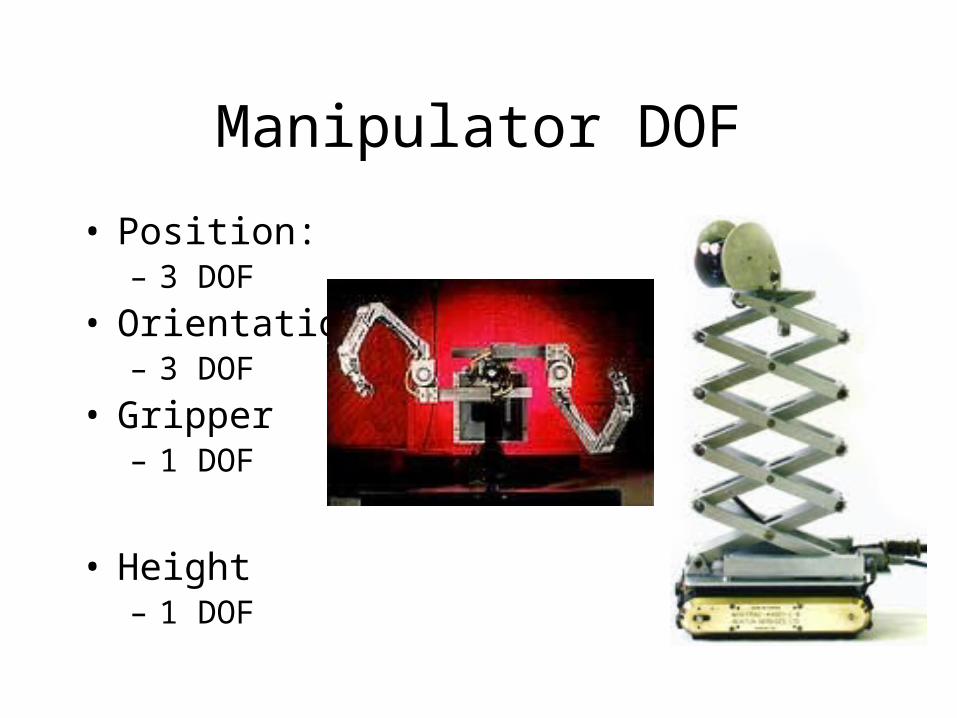
Manipulator DOF
• Position:– 3 DOF
• Orientation:– 3 DOF
• Gripper– 1 DOF
• Height– 1 DOF
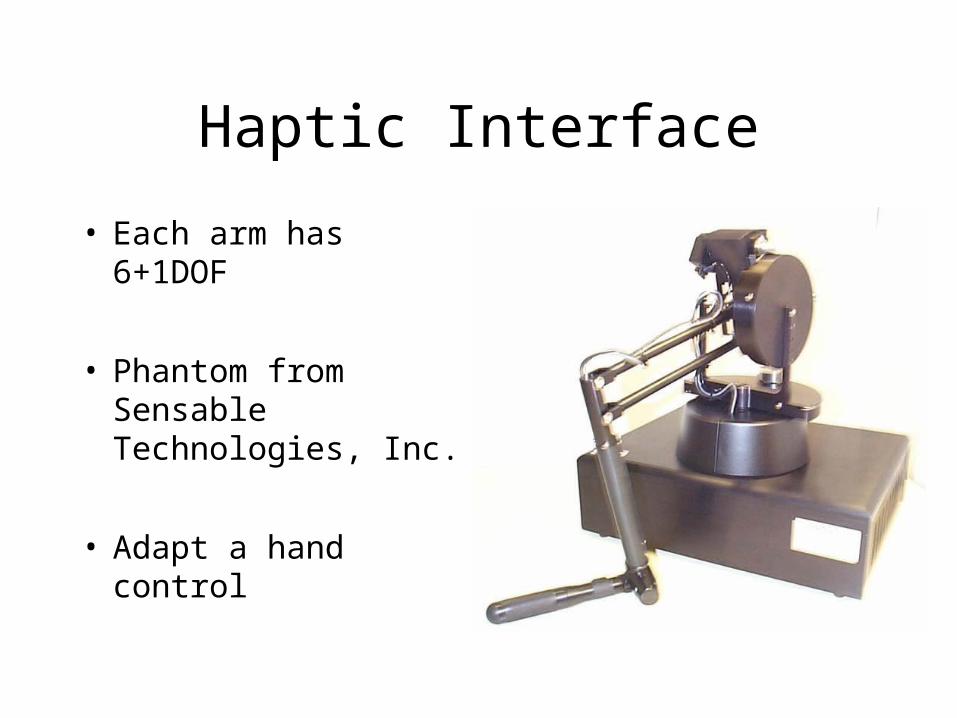
Haptic Interface
• Each arm has 6+1DOF
• Phantom from Sensable Technologies, Inc.
• Adapt a hand control
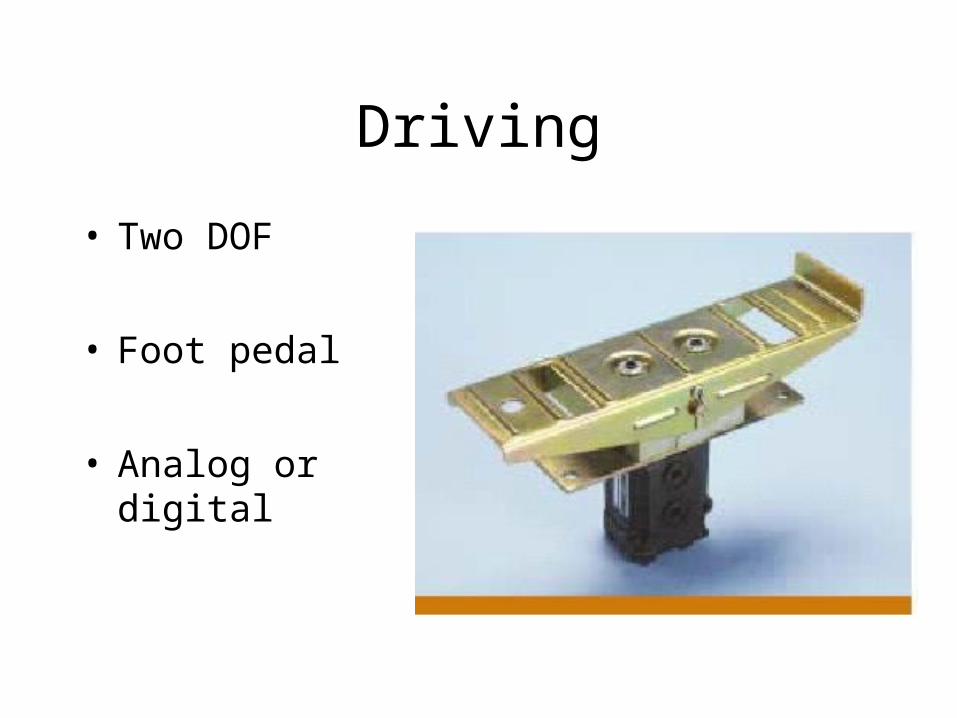
Driving
• Two DOF
• Foot pedal
• Analog or digital
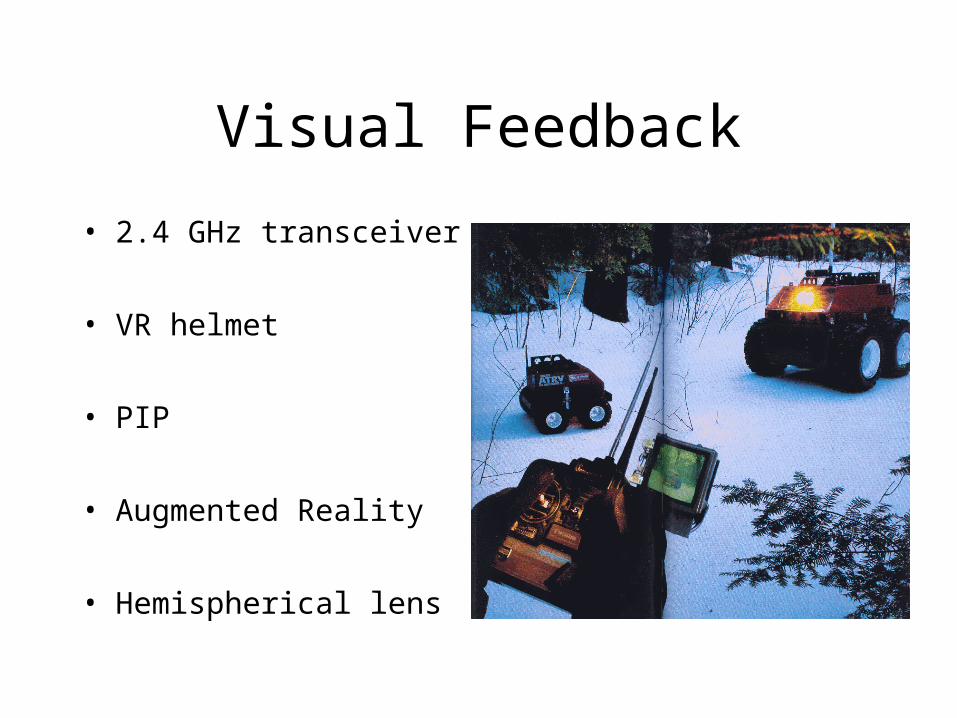
Visual Feedback
• 2.4 GHz transceiver
• VR helmet
• PIP
• Augmented Reality
• Hemispherical lens

Hands Free Options

Voice Recognition
• PC based– High quality
– CPU intensive
• Stand alone (Sensory Inc.)– Emerging
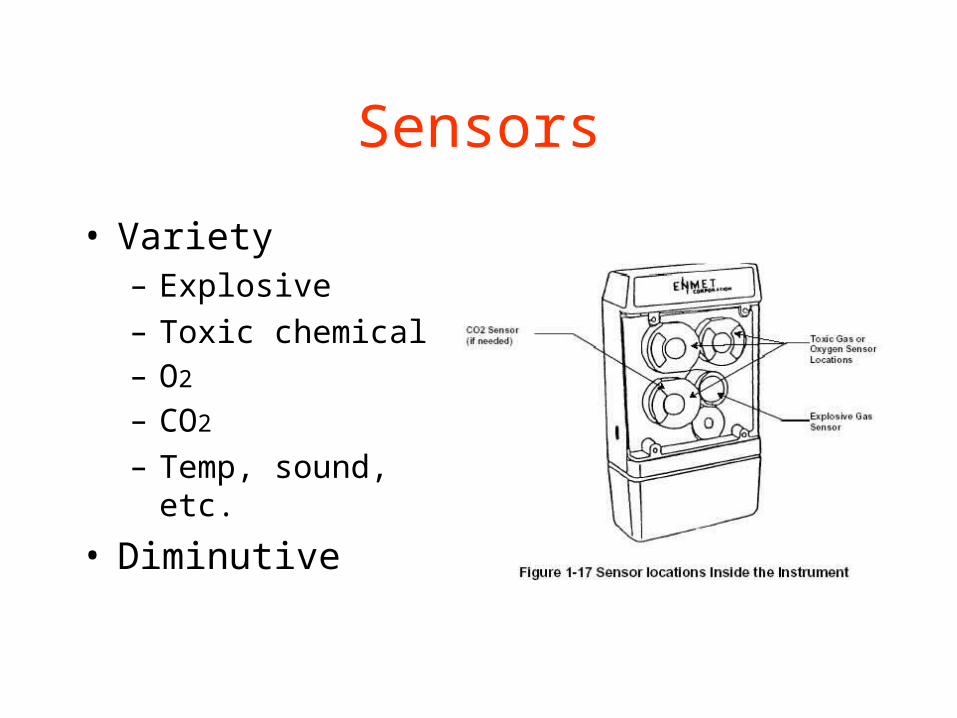
Sensors
• Variety– Explosive
– Toxic chemical– O2
– CO2
– Temp, sound, etc.
• Diminutive
Determining Location
• GPS• Beacons• Dead reckoning
Conclusion
Questions?
Extra Slides
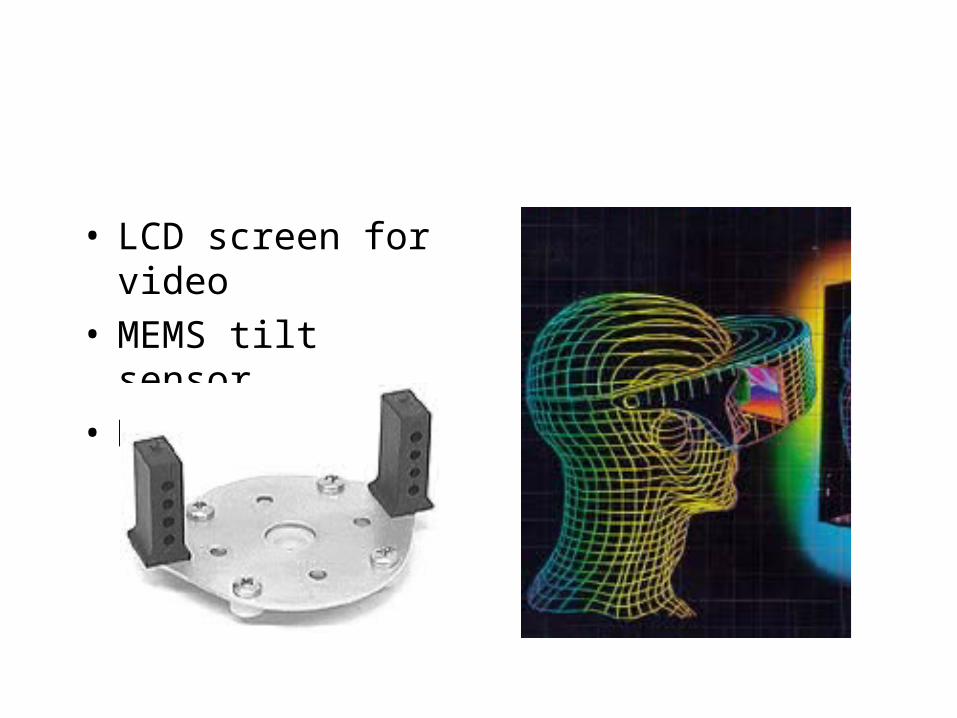
• LCD screen for video• MEMS tilt sensor• Magnetic compass
Dragan-Flyer
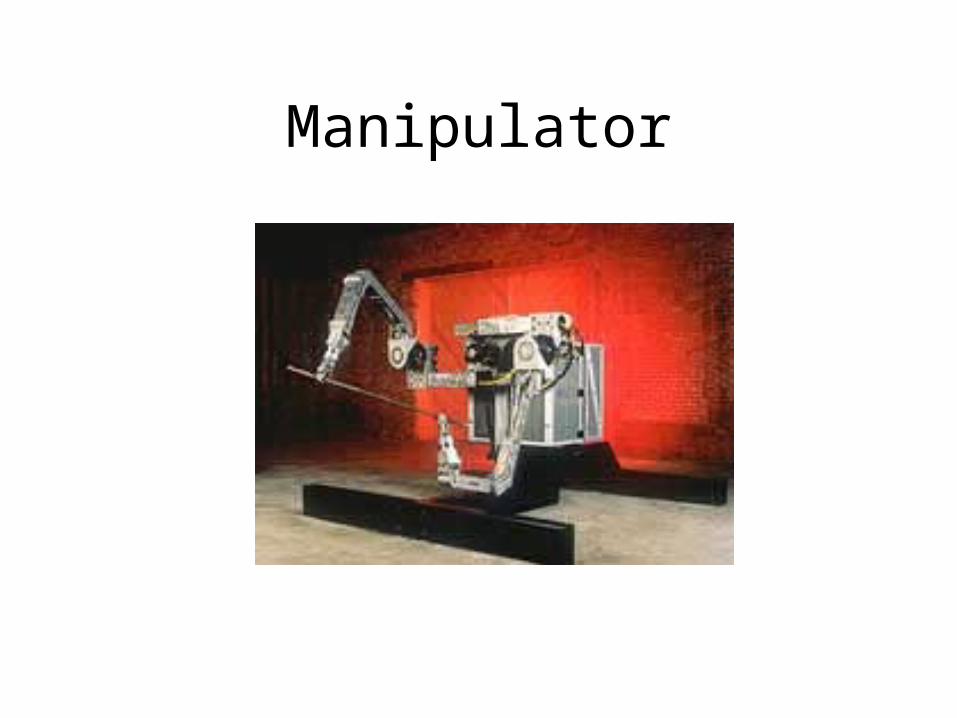
Manipulator
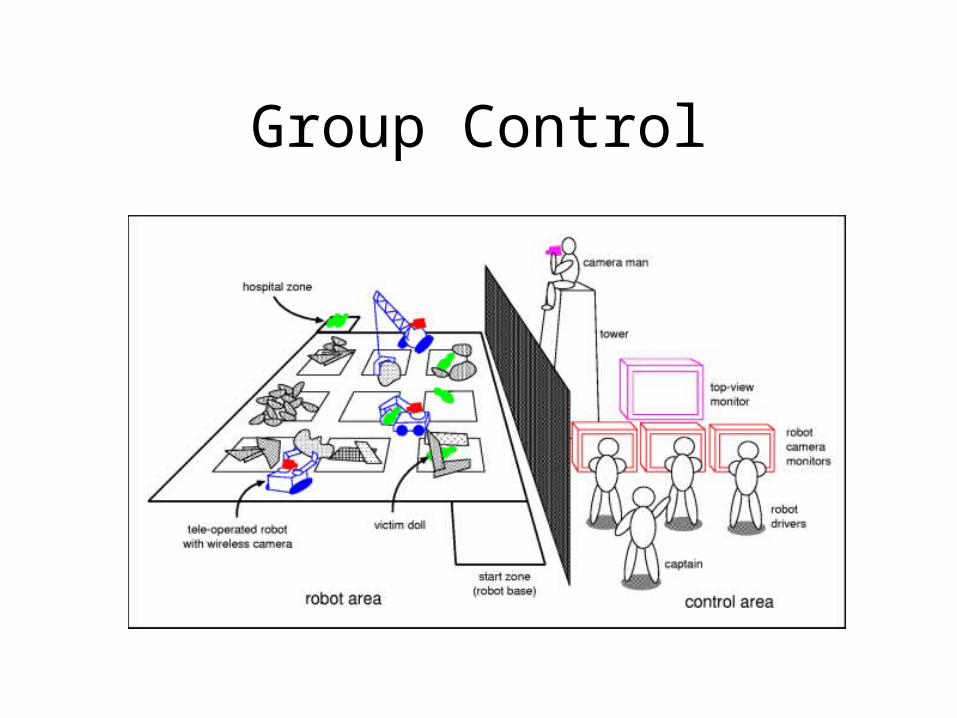
Group Control
Top Related