







Languages
Pages
Legal


Prediction Method of Static Torque Sharing Distribution of Planetary
Gear Sets Generated by Manufacturing Error Distribution
Hiroki Kakiuchi, Honda R&D Co., Ltd.
Romax Technology European Summit 2013
2
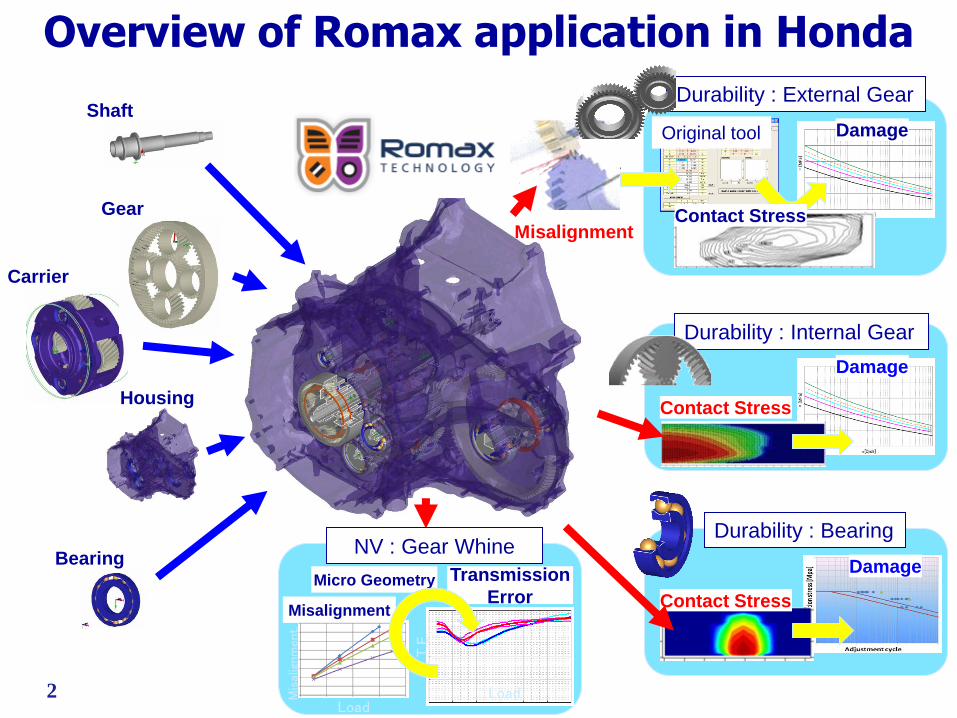
Overview of Romax application in Honda
Misalignment
Shaft
Gear
Carrier
Bearing
Housing
Original tool Damage
Contact Stress
Damage
Durability : Bearing
Contact Stress
Contact Stress
Damage
Durability : External Gear
Load
T.E
.
Transmission
Error Micro Geometry
Misalignment
Mis
alig
nm
ent.
Load
NV : Gear Whine
Durability : Internal Gear
Contents
・Background and objective
・Generation mechanism of uneven torque sharing
・Relational expression between manufacturing errors and torque sharing
・Verification of relational expression
・Verification of accuracy of parameter estimation
・Summary

4
Prediction of Strength of planetary Gears
Prediction of torque distribution necessary
for strength design of planetary gear sets.
The gear with the greatest torque break first.
・・・・・ × ×
×
Pro
bab
ilit
y
Statistics
Planet gear torque
Statistics of torque of each planet
Torque when torque sharing is equal
Problematic region at strength design
5
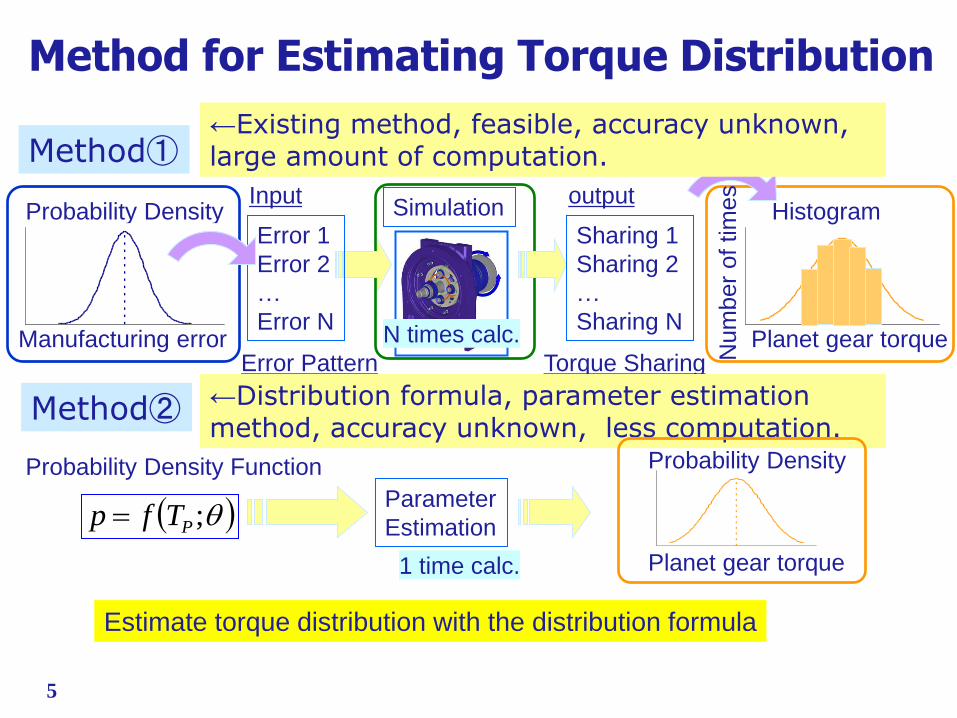
Method for Estimating Torque Distribution
Probability Density
Manufacturing error
Error 1
Error 2
…
Error N
Method①
Histogram
Planet gear torque
Num
ber
of tim
es
Simulation Sharing 1
Sharing 2
…
Sharing N
Input
Torque Sharing Error Pattern
output
N times calc.
Method②
Parameter
Estimation
1 time calc.
←Existing method, feasible, accuracy unknown, large amount of computation.
←Distribution formula, parameter estimation method, accuracy unknown, less computation.
Probability Density Function
;PTfp
Planet gear torque
Probability Density
Estimate torque distribution with the distribution formula
6
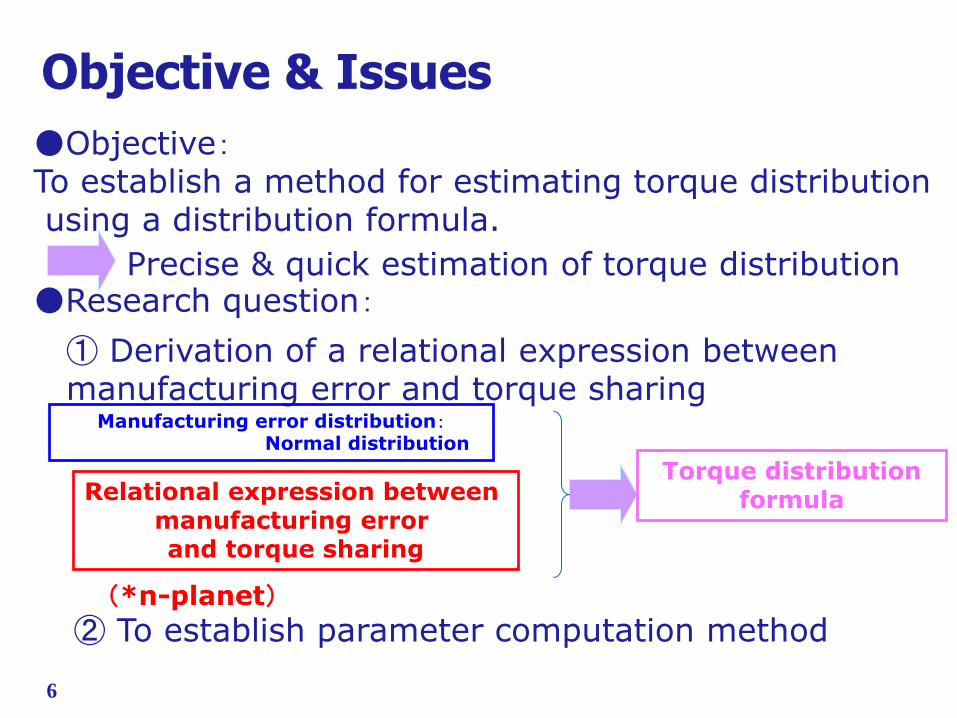
Objective & Issues
●Objective: To establish a method for estimating torque distribution using a distribution formula.
① Derivation of a relational expression between manufacturing error and torque sharing
(*n-planet)
② To establish parameter computation method
●Research question:
Manufacturing error distribution: Normal distribution
Relational expression between manufacturing error and torque sharing
Torque distribution formula
Precise & quick estimation of torque distribution
7
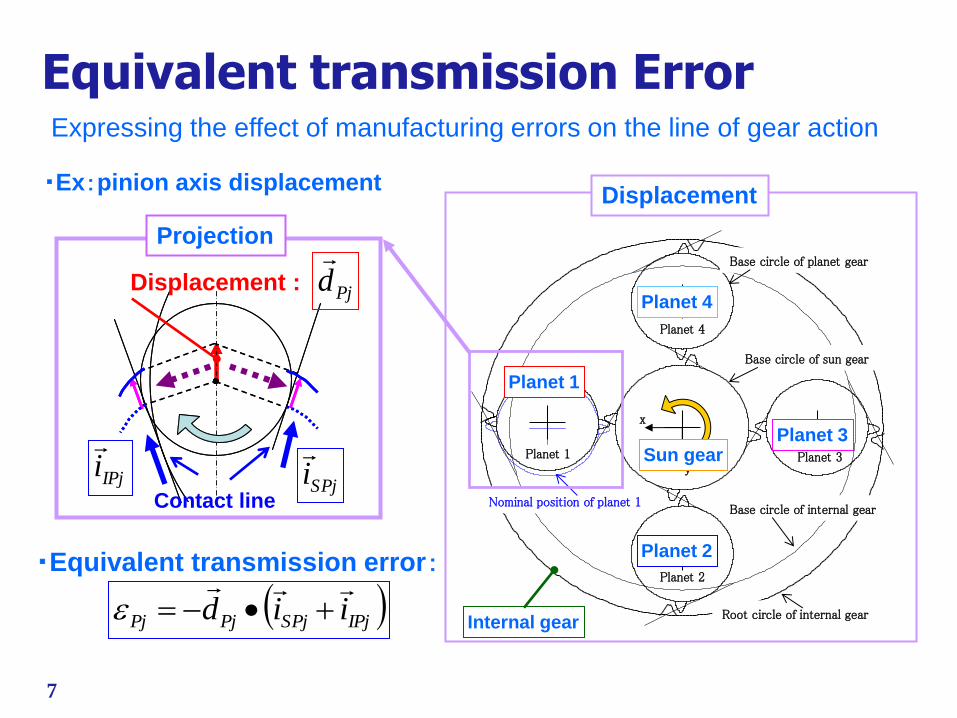
Equivalent transmission Error
Planet 1
x
y
Planet 2
Planet 3
Planet 4
Root circle of internal gear
Base circle of internal gear
Base circle of sun gear
Base circle of planet gear
Nominal position of planet 1
・Ex:pinion axis displacement
Planet 1
Planet 2
Planet 3
Planet 4
IPjSPjPjPj iid
IPji
SPji
・Equivalent transmission error:
Expressing the effect of manufacturing errors on the line of gear action
Projection
Displacement
Displacement : Pjd
Internal gear
Sun gear
Contact line
8
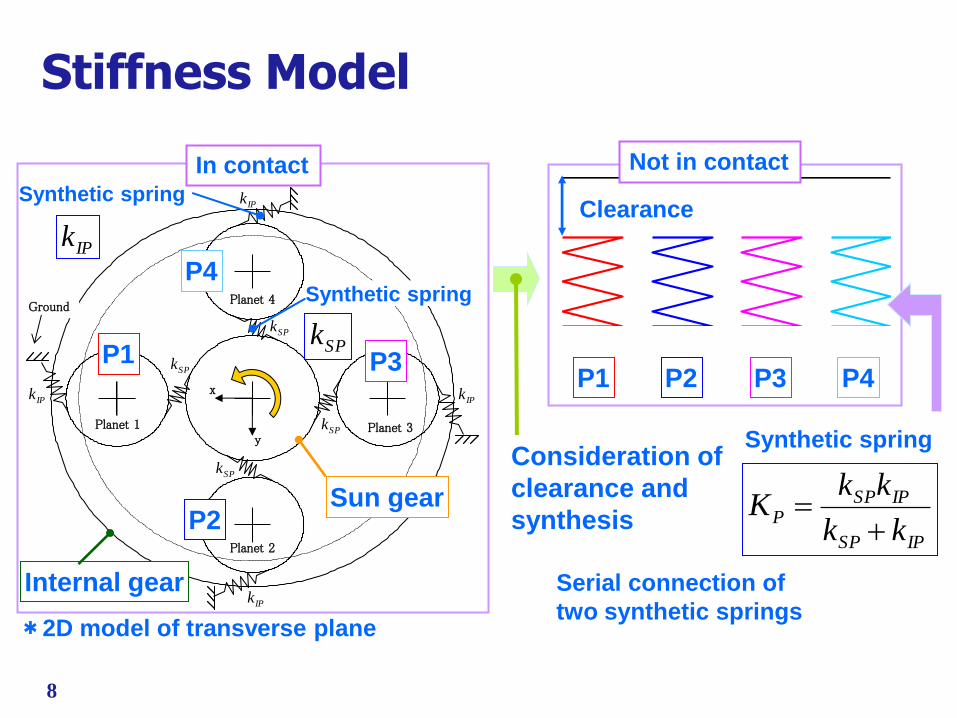
Stiffness Model
Ground
x
yPlanet 1
Planet 2
Planet 3
Planet 4
IPk
SPk
SPk
SPk
SPk
IPk
IPk
IPk
P1 P2 P3 P4 P1
P2
P3
P4
Clearance
Serial connection of
two synthetic springs
IPSP
IPSPP
kk
kkK
*2D model of transverse plane
In contact Not in contact
Synthetic spring
Synthetic spring
Synthetic spring
SPk
IPk
Consideration of
clearance and
synthesis Sun gear
Internal gear
9
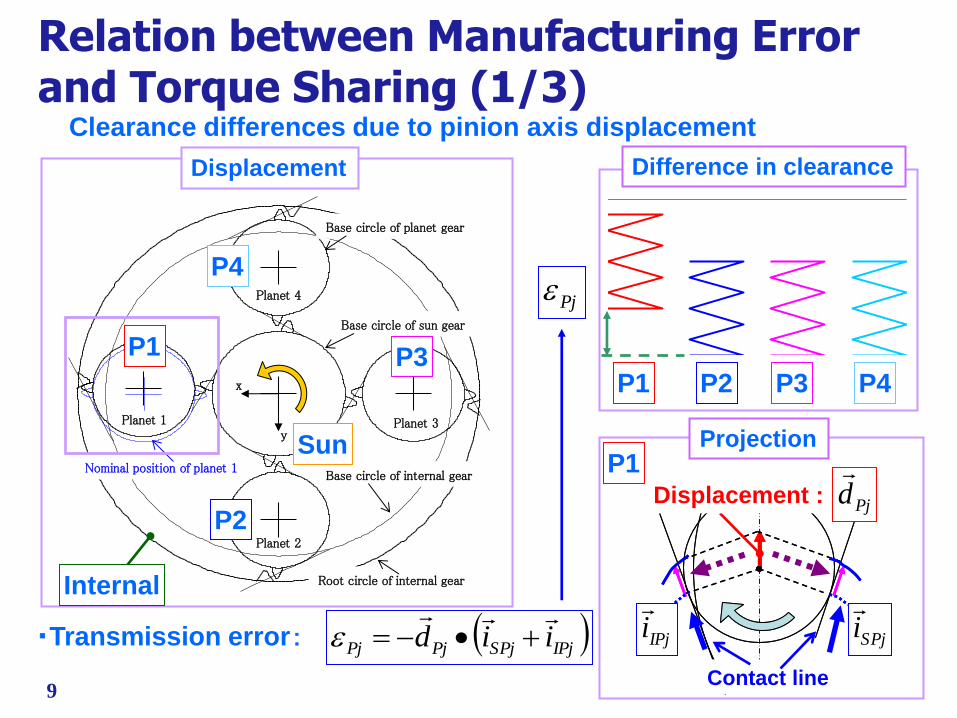
Relation between Manufacturing Error and Torque Sharing (1/3)
P1 P2 P3 P4
IPjSPjPjPj iid
Pj
Planet 1
x
y
Planet 2
Planet 3
Planet 4
Root circle of internal gear
Base circle of internal gear
Base circle of sun gear
Base circle of planet gear
Nominal position of planet 1
Displacement
Sun
Difference in clearance
IPji
SPji
Projection
Displacement : Pjd
Contact line
P1
P2
P3
P4
P1
Internal
Clearance differences due to pinion axis displacement
・Transmission error:

10
Relation between Manufacturing Error and Torque Sharing (2/3)
Planet 1
x
y
Planet 2
Planet 3
Planet 4
Planet gear position without carrier translation
In contact In contact
Not in contact
Not in contact
In contact In contact
Not in contact
Not in contact
P1 P2 P3 P4
IPjSPjPjPj iicc
Pjc Self-centering action
Sun
P1
P2
P3
P4
Internal
After self-centering
Effect of self-centering action
also expressed on the
transmission action line
11
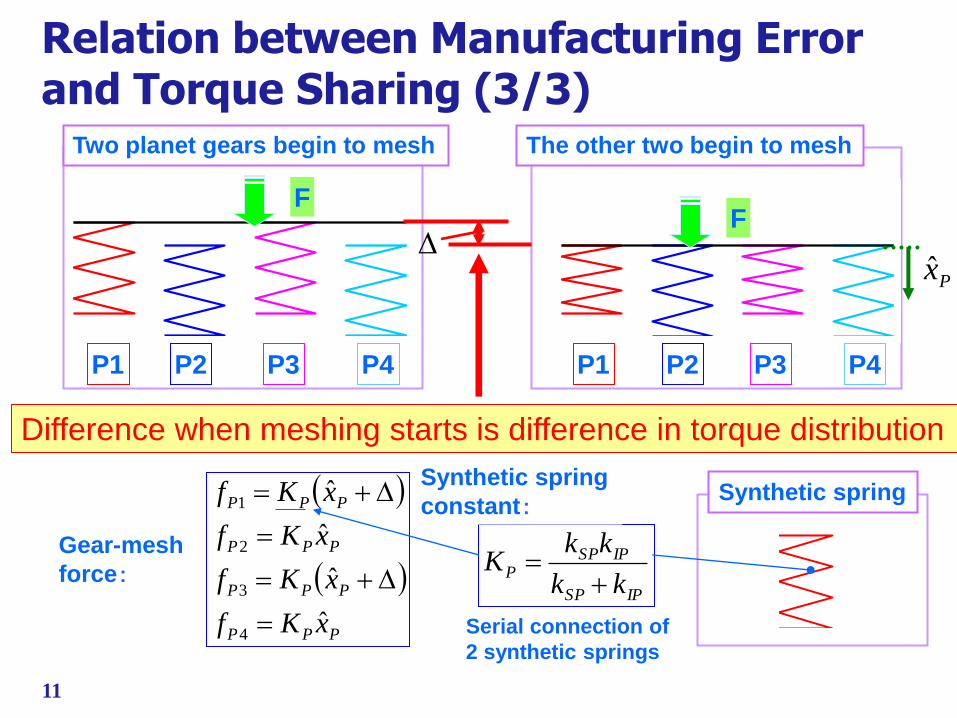
Relation between Manufacturing Error and Torque Sharing (3/3)
P1 P2 P3 P4 P1 P2 P3 P4
F
Difference when meshing starts is difference in torque distribution
Px̂
PPP
PPP
PPP
PPP
xKf
xKf
xKf
xKf
ˆ
ˆ
ˆ
ˆ
4
3
2
1
IPSP
IPSPP
kk
kkK
Two planet gears begin to mesh
F
The other two begin to mesh
Gear-mesh
force:
Serial connection of
2 synthetic springs
Synthetic spring Synthetic spring
constant:
12
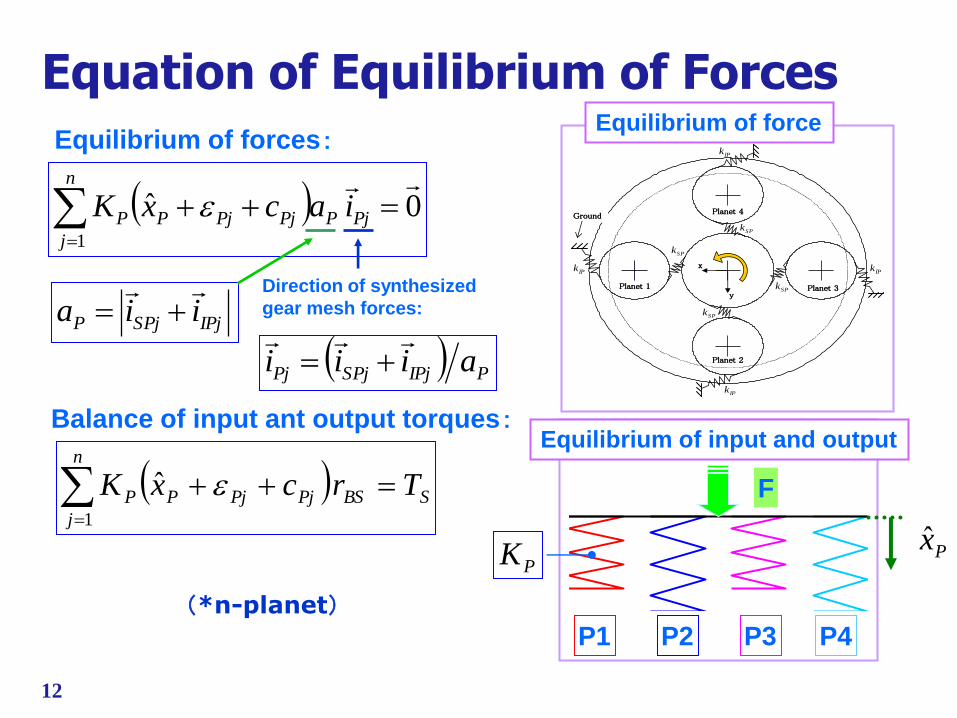
Equation of Equilibrium of Forces
Ground
x
yPlanet 1
Planet 2
Planet 3
Planet 4
IPk
SPk
SPk
SPk
SPk
IPk
IPk
IPk
0ˆ1
n
j
PjPPjPjPP iacxK
S
n
j
BSPjPjPP TrcxK 1
ˆ
PK
Equilibrium of forces:
Balance of input ant output torques:
IPjSPjP iia
PIPjSPjPj aiii
Equilibrium of force
P1 P2 P3 P4
Px̂
F
Equilibrium of input and output
Direction of synthesized
gear mesh forces:
(*n-planet)
13
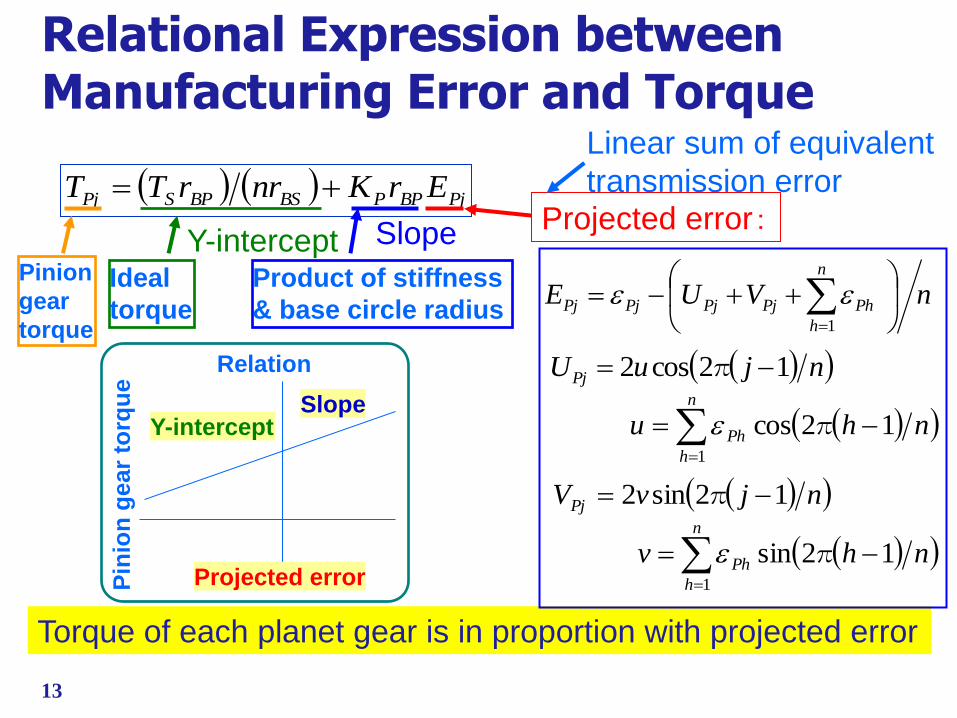
Relational Expression between Manufacturing Error and Torque
Projected error: PjBPPBSBPSPj ErKnrrTT
nVUEn
h
PhPjPjPjPj
1
njuUPj 12cos2 π
njvVPj 12sin2 π
n
h
Ph nhu1
12cos π
n
h
Ph nhv1
12sin π
Torque of each planet gear is in proportion with projected error
Ideal
torque
Product of stiffness
& base circle radius
Y-intercept Slope
Projected error
Y-intercept Slope
Pin
ion
gear
torq
ue
Relation
Pinion
gear
torque
Linear sum of equivalent
transmission error
14
Projected error
Pin
ion
gear
torq
ue
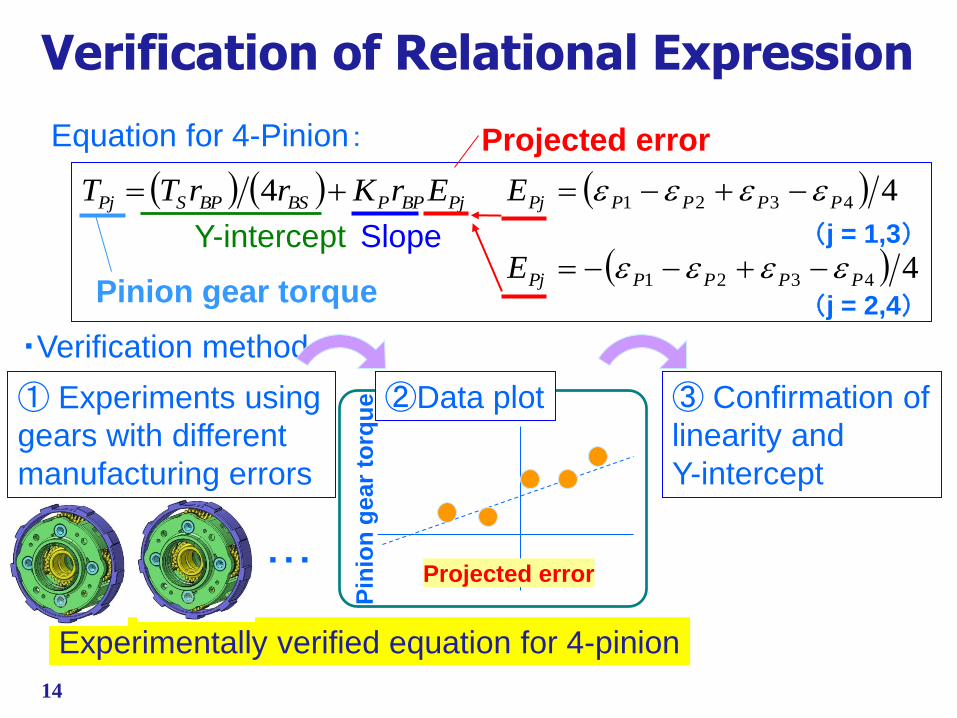
Verification of Relational Expression
Equation for 4-Pinion:
Experimentally verified equation for 4-pinion
PjBPPBSBPSPj ErKrrTT 4 44321 PPPPPjE
44321 PPPPPjE (j = 1,3)
(j = 2,4)
Y-intercept Slope
・Verification method
① Experiments using
gears with different
manufacturing errors
③ Confirmation of
linearity and
Y-intercept
②Data plot
Projected error
Pinion gear torque
・・・
15
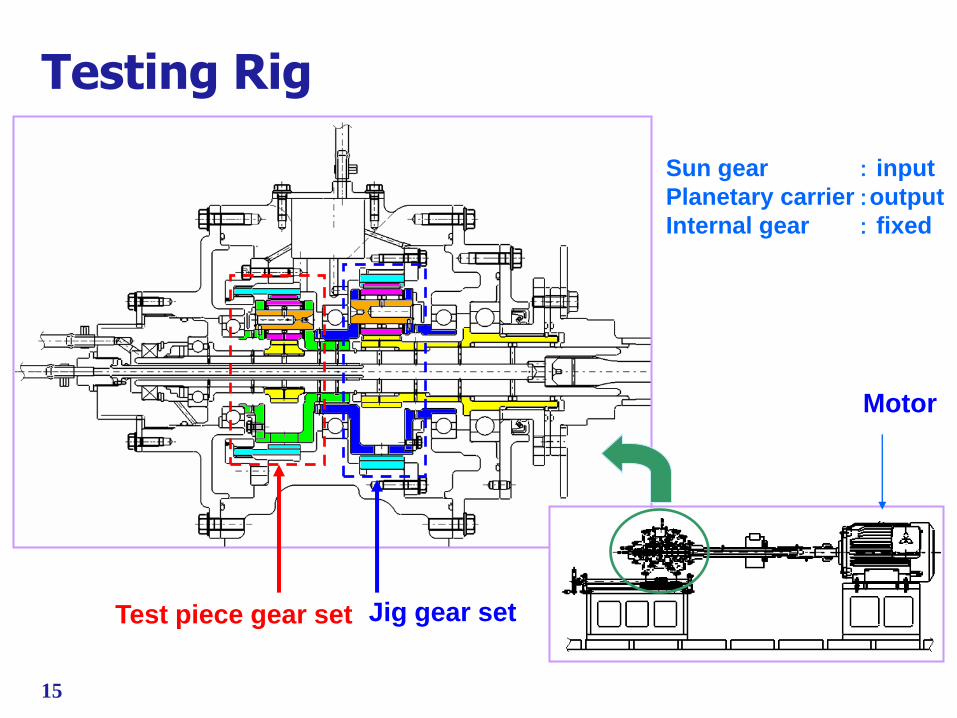
Sun gear : input
Planetary carrier :output
Internal gear : fixed
Testing Rig
Test piece gear set Jig gear set
Motor
16
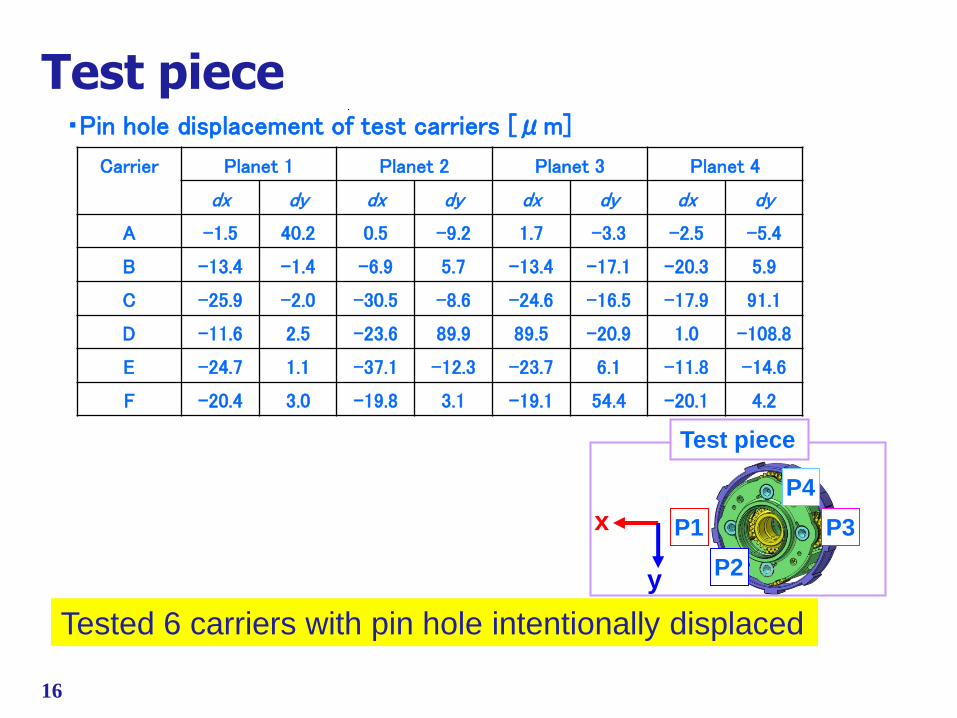
Test piece
Tested 6 carriers with pin hole intentionally displaced
・Pin hole displacement of test carriers [μm]
Carrier Planet 1 Planet 2 Planet 3 Planet 4
dx dy dx dy dx dy dx dy
A -1.5 40.2 0.5 -9.2 1.7 -3.3 -2.5 -5.4
B -13.4 -1.4 -6.9 5.7 -13.4 -17.1 -20.3 5.9
C -25.9 -2.0 -30.5 -8.6 -24.6 -16.5 -17.9 91.1
D -11.6 2.5 -23.6 89.9 89.5 -20.9 1.0 -108.8
E -24.7 1.1 -37.1 -12.3 -23.7 6.1 -11.8 -14.6
F -20.4 3.0 -19.8 3.1 -19.1 54.4 -20.1 4.2
P1
P2
P3
P4
x
y
Test piece

17
Method for Torque Prediction (1/2)
Torque on each planet gear estimated from internal gear strain
Strain of internal gear
Torque on
each planet gear
Estimate
18
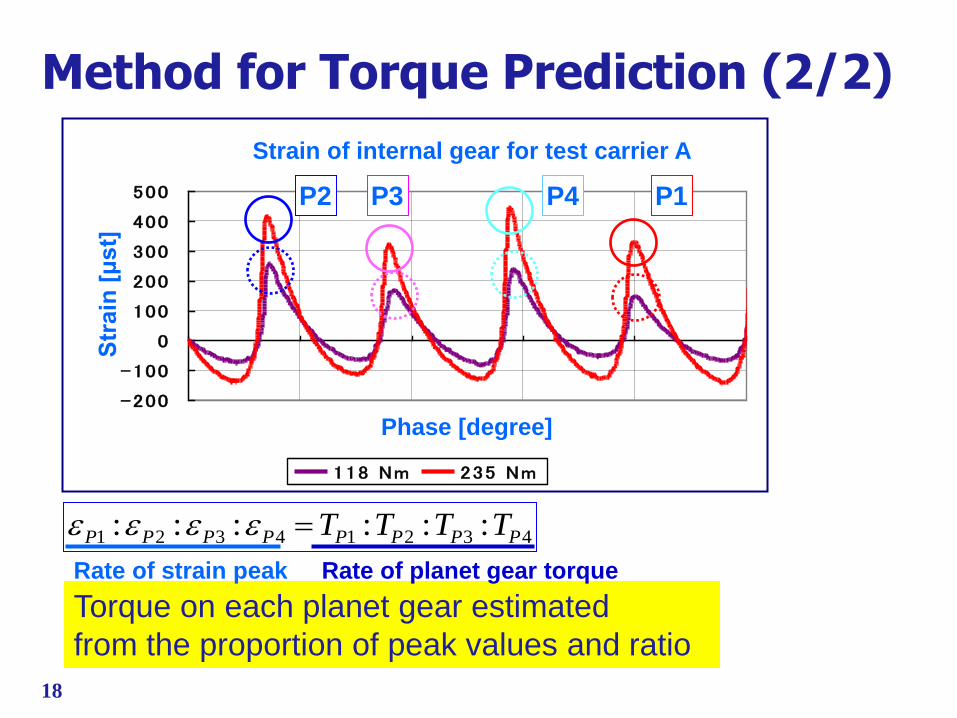
Method for Torque Prediction (2/2)
Strain of internal gear
-200
-100
0
100
200
300
400
500
Time [sec]
Str
ain [
μst
]
118 Nm 235 Nm
Torque on each planet gear estimated
from the proportion of peak values and ratio
Phase [degree]
Str
ain
[μ
st]
Strain of internal gear for test carrier A
P2 P1 P3 P4
43214321 :::::: PPPPPPPP TTTT
Rate of strain peak Rate of planet gear torque
19
0
10
20
30
40
50
60
-30 -20 -10 0 10 20 30
Projected error : EP1 [μm]
To
rqu
e :
TP
1 [
Nm
]
118 Nm 157 Nm 196 Nm 235 NmL 118 Nm L 157 Nm L 196 Nm L 235 Nm
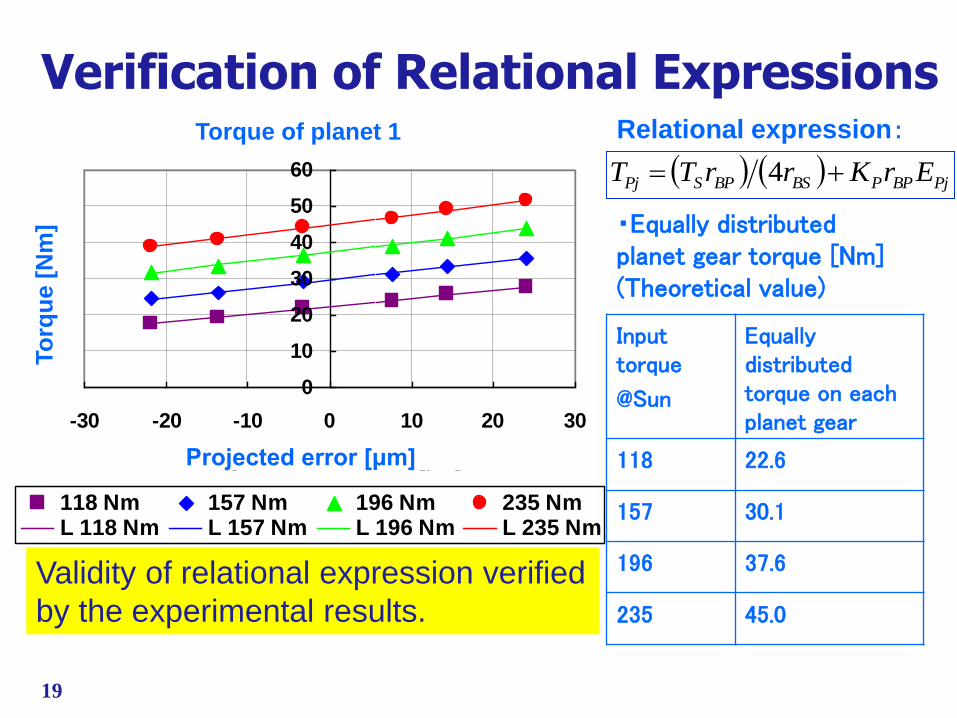
Verification of Relational Expressions
Validity of relational expression verified
by the experimental results.
Projected error [μm]
To
rqu
e [
Nm
]
Torque of planet 1
PjBPPBSBPSPj ErKrrTT 4
Input torque
@Sun
Equally distributed torque on each planet gear
118 22.6
157 30.1
196 37.6
235 45.0
Relational expression:
・Equally distributed planet gear torque [Nm] (Theoretical value)

20
Mean:
SD:
Torque distribution formula Torque distribution formula(With displaced pin holes)
Stiffness Kp needs to be computed for parameter estimation
222exp21 mTTf PjPj
BSBPS nrrTm
nnrKa PHBPPP 3
6bPH
Variables other than Kp can be obtained
from existing data.
←Normal distribution
PjBPPBSBPSPj ErKnrrTT Relational
expression:
b: Pin hole position accuracy φb
21
Projected error
Slope P
inio
n g
ear
torq
ue
Estimation
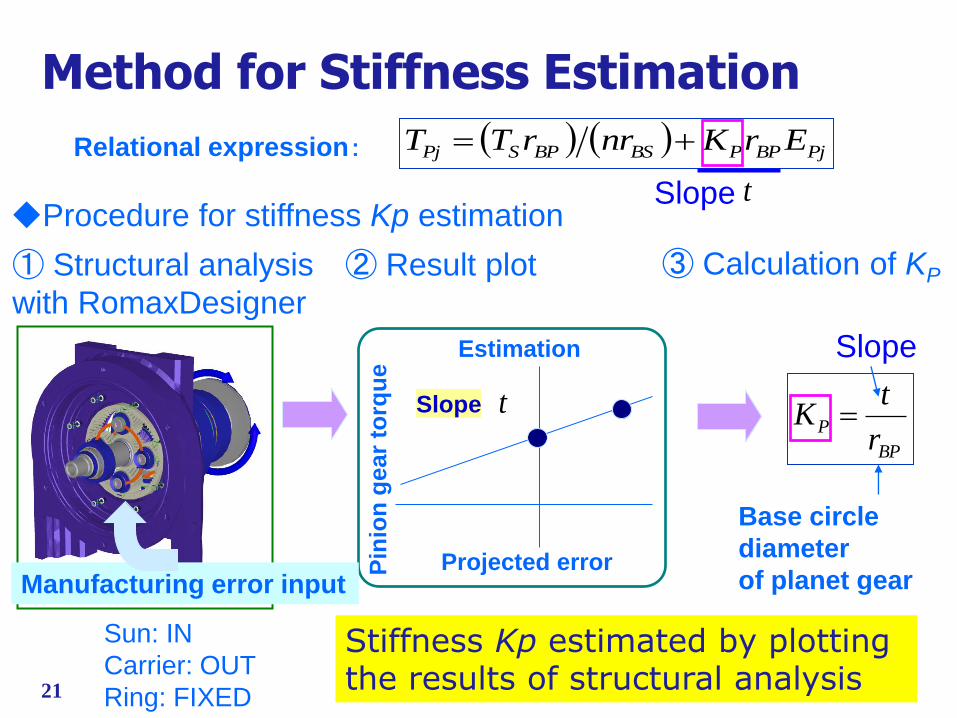
Method for Stiffness Estimation
PjBPPBSBPSPj ErKnrrTT
Stiffness Kp estimated by plotting the results of structural analysis
Relational expression:
Base circle
diameter
of planet gear
◆Procedure for stiffness Kp estimation
① Structural analysis
with RomaxDesigner
② Result plot
Manufacturing error input
③ Calculation of KP
t
t
Slope
BP
Pr
tK
Slope
Sun: IN
Carrier: OUT
Ring: FIXED
22
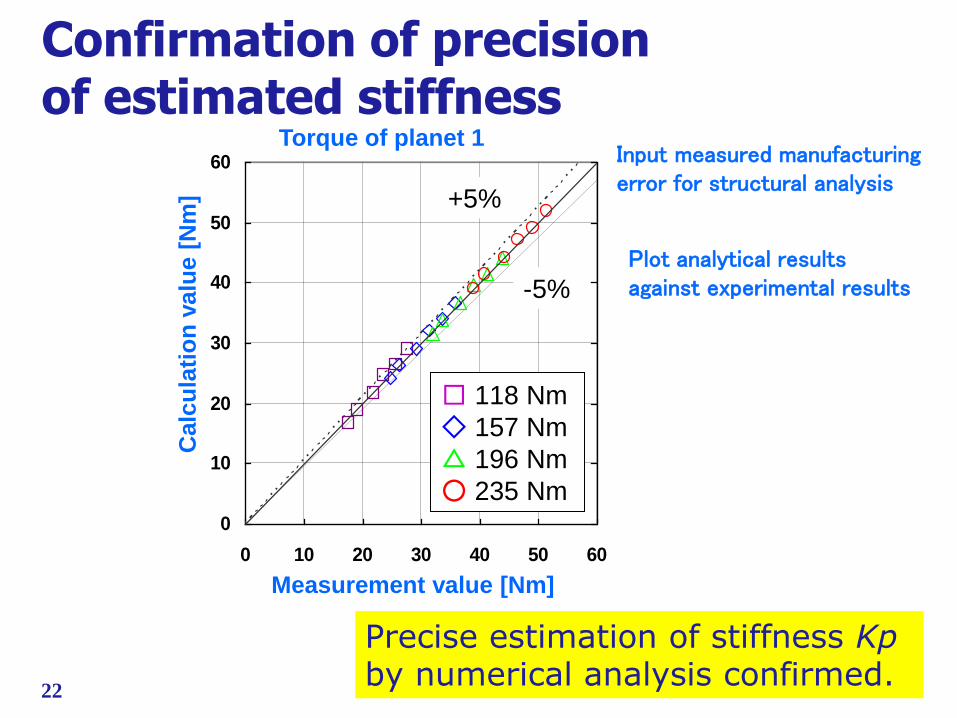
Torque of planet 1
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Measurement value [Nm]
An
aly
sis
valu
e [
Nm
]
□ 118 Nm
◇ 157 Nm
△ 196 Nm
○ 235 Nm
-5%
+5%
Confirmation of precision of estimated stiffness
Precise estimation of stiffness Kp by numerical analysis confirmed.
Calc
ula
tio
n v
alu
e [
Nm
]
Torque of planet 1
Measurement value [Nm]
Plot analytical results against experimental results
Input measured manufacturing error for structural analysis
23
Summary 1. Derived a relational expression between
manufacturing error and the torque on each planet gear in a normal n-planet planetary gear set.
2. Verified the relational expression using experimental results.
3. With RomaxDesigner, Stiffness parameter Kp for distribution can be precisely estimated using existing data.
In conclusion, the distribution of torque on each planet gear in a planetary gear set originating from manufacturing errors can be estimated precisely and efficiently.

24
Top Related