







Languages
Pages
Legal


E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
MPC and
Applications
Eduardo F. Camacho
Universidad de Sevilla
1E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Outline
Model Predictive Control
Applications
Oil pipelines
UAV trajectories
Solar energy
2
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Woody Allen:
“I took a speed reading course and read
'War and Peace' in twenty minutes. …
….. It involves Russia.”
3E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
MPC successful in industry.
Many and very diverse and successful
applications:
Petrochemical, polymers,
Semiconductor production,
Air traffic control
Clinical anesthesia,
….
Life Extending of Boiler-Turbine Systems via
Model Predictive Methods, Li et al (2004)
Many MPC vendors
4
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
MPC successful in Academia
Many MPC sessions in control conferences
(2/12 at this symposium) and control journals,
MPC workshops.
MPC in other research areas: industrial
electronics, chemical engineering, energy,
transport …
4/8 finalist papers for the IFAC journal CEP
best paper award were MPC papers (2/3
finally awarded were MPC papers)
5E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
IFAC Pilot Industry CommitteeChaired by Tariq Samad (Honeywell), 28 total: 15 industry, 12
academia, 1 gov’t;
Members asked to assess impact of several advanced control
technologies:
Q1 Responses [23 responses]
• PID control: 23 High-impact
• Model-predictive control: 18 High-impact; 2 No/Lo impact
• System identification: 14 High-impact; 2 No/Lo impact
• Process data analytics: 14 High-impact; 4 No/Lo impact
• Soft sensing: 12 High-impact; 5 No/Lo impact
• Fault detection and identification [22]: 11 High-impact; 4 No/Lo impact
• Decentralized and/or coordinated control: 11 High-impact; 7 No/Lo impact
• Intelligent control: 8 High-impact; 7 No/Lo impact
• Discrete-event systems [22]: 5 High-impact; 7 No/Lo impact
• Nonlinear control: 5 High-impact; 8 No/Lo impact
• Adaptive control: 4 High-impact; 10 No/Lo impact
• Hybrid dynamical systems: 3 High-impact; 10 No/Lo impact
• Robust control: 3 High-impact; 10 No/Lo impact
6

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Why is MPC so successful ?
MPC is Most general way of posing the control problem in the time domain: Optimal control
Stochastic control
Known references
Measurable disturbances
Multivariable
Dead time
Constraints
Uncertainties
7E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Real reason of success: Economics
MPC can be used to optimize operating points (economic objectives). Optimum usually at the intersection of a set of constraints.
Obtaining smaller variance and taking constraints into account allow to operate closer to constraints (and optimum).
Repsol reported 2-6 months payback periods for new MPC applications.
P1 P2
Tmax
8
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Flash
Línea 2
Línea 1Lavado
Contacto 1
Contacto 3
Contacto 2
EXHAUST GAS PIPING
9E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
10
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
-5
-4
-3
-2
-1
0
1
2
1 100 199 298 397 496 595 694 793 892
Serie1
11E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
12

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Benefits
Yearly saving of more that 1900 MWh
Standard deviation of the mixing chamber
pressure reduced from 0.94 to 0.66
Operator’s supervisory effort: percentage
of time operating in auto mode raised
from 27% to 84%.
13E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
14
MPC strategy
At sampling time t the future control sequence is compute so that the future sequence of predicted output y(t+k/t) along a horizon N follows the future references as best as possible.
The first control signal is used and the rest disregarded.
The process is repeated at the next sampling instant t+1
t t+1 t+2 t+N
Control actions
Setpoint
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 15
tt+1t+2
t+N t t+1 t+2 …….. t+N
u(t)
Only the first
control move is
applied
Errors minimized over
a finite horizon
Constraints
taken into
account
Model of
process used
for predicting
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 16
t+2 t+1
t+N
t+N+1
t t+1 t+2 …….. t+N t+N+1
u(t)
Only the first
control move is
applied again
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 17
PID: u(t)=u(t-1)+g0 e(t) + g1 e(t-1) + g2 e(t-2)
MPC vs. PID
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
MPC strategy
Consider a nonlinear invariant discrete time system:
x+=f(x,u), x Rn, u Rm
The system is subject to hard constraints
x X, u U
Let u={u(0),...,u(N-1) } be a sequence of N control inputsapplied at x(0)=x,
the predicted state at i is
x(i)=(i;x, u)=f(x(i-1), u(i-1) )
18
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
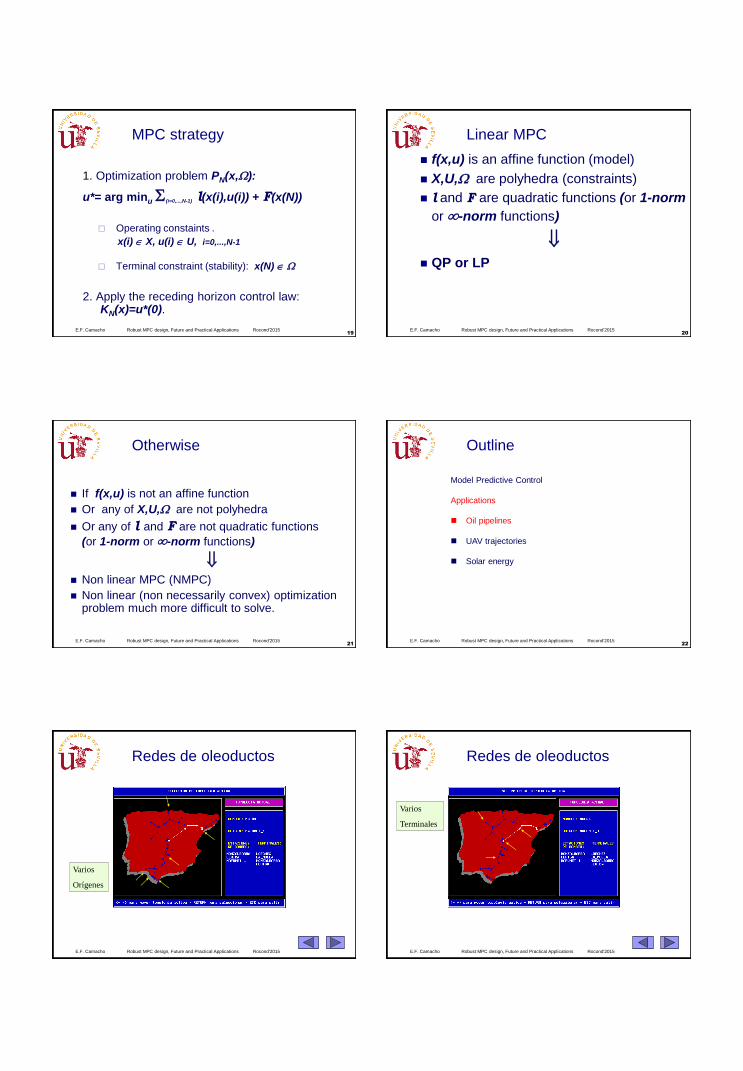
MPC strategy
1. Optimization problem PN(x,):
u*= arg minu (i=0,...,N-1) l(x(i),u(i)) + F(x(N))
Operating constaints .
x(i) X, u(i) U, i=0,...,N-1
Terminal constraint (stability): x(N)
2. Apply the receding horizon control law: KN(x)=u*(0).
19E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Linear MPC
f(x,u) is an affine function (model)
X,U, are polyhedra (constraints)
l and F are quadratic functions (or 1-norm
or -norm functions)
QP or LP
20
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Otherwise
If f(x,u) is not an affine function
Or any of X,U, are not polyhedra
Or any of l and F are not quadratic functions
(or 1-norm or -norm functions)
Non linear MPC (NMPC)
Non linear (non necessarily convex) optimization problem much more difficult to solve.
21E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Outline
Model Predictive Control
Applications
Oil pipelines
UAV trajectories
Solar energy
22
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Redes de oleoductos
Varios
Orígenes
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Redes de oleoductos
Varios
Terminales

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Redes de oleoductos
Topologías
Activas
Líneas
Dobles
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Oleoductos Simples (Topología)
Origen
Terminal
Estación
Bombeo
Bifurcación
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Estaciones de Bombeo
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Piezométrica
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Terminales
• Depósitos para distintos tipos de productos
• Volúmenes operativos máximos y mínimos
• ConsumosE.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Descripción del problema
Problema Global
Conocidos:
Periodo de tiempo
Capacidad de producción de origenes
Necesidades en los terminales (consumo)
Obtener:
Secuencia de bombeo en cada origen
Distribución origen-terminal
Obtención de las secuencias de bombeo
Operación óptima del oleoducto
Operación de las estaciones de bombeo
Ajuste de válvulas en terminales o bifurcaciones

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Simulación de Oleoductos
Modelo (I)
Estaciones de Bombeo
Configuraciones programables
Curvas características
Válvulas
Terminales
Capacidades
Consumo variable
Válvulas de regulación de caudal
Tubería
Diámetro
Rugosidad
Longitud
Head Power
Flow
Bifurcaciones
– Válvulas de regulación
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Modo Automático
Modo Stripping (I)
Caudal de entrada en cada terminal proporcional al volumen del
paquete destinado a dicho terminal
BATCH 1
TERM1 : 30%
OTROS: 70 %
Q=100
TERM1
Qi=30
Qs=70
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Simulación de Oleoductos
Modelo (II)
Caída de Presión: Ecuación de Hazen-Williams
C : Coeficiente de Hazen-Williams
J : Caida de presión en metros por kilómetro
D : Diámetro interior en milímetros
f : Viscosidad del producto en centistokes
Q : Caudal en metros cúbicos por hora
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Simulación de Oleoductos
Modelo (III)
Perfil Topográfico
Agentes externos
– Tarifas Eléctricas (Tres tarifas dependiendo del
día de la semana y de la hora del día)
– Paradas para mantenimiento
Paquetes
– Identificación
– Tipo de Producto
– Volumen total
– Destinos
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Simulación de Oleoductos
Tipos de Eventos
Llegada de interfases a un componente (estación de
bombeo, terminal,...)
Nivel de un depósito en valor extremo (desbordamiento
o desabastacimiento)
Cambio de tarifa eléctrica (para calcular el coste de
operación)
Parada del sistema
Arranque del oleoducto
Evento periódico (para prevenir tiempos entre eventos
demasiado largos)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Modo Automático
Restricción del Espacio V-T
Curva Superior: Bombeo utilizando la capacidad máxima del sistema
Curva inferior: Cantidad mínima bombeada que permite que cubre las
necesidades y el tiempo prefijado de bombeo
Curva Superior
Curva Inferior

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Proyecto ASSESSMENT OF ENERGY
SAVING IN OIL PIPELINES (AESOP)
Redes de oleoductos casi saturadas. Necesidad de
incrementar las capacidades de transporte en los
oleoductos
Uso de aditivos poliméricos (flow improvers)
Experiencias previas muestran que reducen drásticamente las
Caídas de Presión
Muchas cuestiones abiertas para grandes instalaciones
industriales
Socios: CLH, SMPR, LICENERGY,CRF, CSL, USE
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Proyecto AESOP (EU)
38
DRA
Energy Saving
Transport capabilities
increasing
Truck fleet
reduction
CO2 emission
reduction
Road and railways
traffic reduction
FuelSpillage risk
reduction
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 39
Friction Reduction from the injection point
Pipeline diameter: 12"
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
0,0 20,0 40,0 60,0 80,0 100,0 120,0 140,0 160,0 180,0 200,0
Km from origin
FR
%
AG-RO (5 ppm) AG-RO (10 ppm) AG-RO (15 ppm) AG-RO (20 ppm) PO-LO (10 ppm)
Friction Reduction from the injection point
Pipeline diameter: 10"
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
0,000 20,000 40,000 60,000 80,000 100,000 120,000
Km from origin
FR
(%
)
AD-PO (5 ppm) AD-PO (10 ppm) AD-PO (15 ppm) MA-LE (10 ppm) HU-SE (5 ppm) HU-SE (10 ppm)
Friction Reduction from the injection point
Pipeline diameter: 14"
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
76,00 78,00 80,00 82,00 84,00 86,00 88,00 90,00 92,00 94,00
Km from origin
FR
(%
)
SO-MI (5ppm) SO-MI (10 ppm) SO-MI (15 ppm)
USE
1. Modelo de la efectividad y
degradación de los polímeros
2. Simulación oleoductos con
inyección de polímeros
3. Optimización de la operación
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Resultados europeos
40
ADDITIVE
CONCENTRATION
(ppm)
AVERAGE
FUEL FLOW
INCREASING
(%)
TRAFFIC
INCREASING
(millions of ton
km)
ENERGY SAVING
(GW h)
5 26,8 28.676 6.046
10 40,4 43.228 9.114
15 44,4 47.508 10.016
20 52,4 56.068 11.821
ADDITIVE
CONCENTRATION
(ppm)
AVERAGE
ENERGY
SAVING
(kWh/ton
km)
AVERAGE
ENERGY
SAVING
(%)
AVERAGE
ENERGY
SAVING
(GWh)
PRIMARY
ENERGY
SAVING
(GWh)
5 0,0096 19 1027 3094
10 0,0134 26,5 1434 4319
15 0,0155 30,7 1659 4995
20 0,0182 36 1947 5866
Escenario 1: Oleoductos con capacidad suficiente
Escenario 2: Oleoductos saturados. El aumento se transporta
por camiones y trenes
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Outline
Model Predictive Control
Applications
Oil pipelines
UAV trajectories
Solar energy
41E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
AIRPORTS-MPC(Project funded by Boeing)
42
Project GoalsMinimize control error with respect to guidance indications
• Flight guidance shall be provided in the form of AIDL (Aircraft Intent
Description Language)
• MPC is expected to increase performance, in particular, during
transitory maneuvers in comparison with conventional flight
controllers
• Actual flight tests imply that considerations for real-time, embedded
execution and uncertainties in the flight dynamics need to be taken

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Sample AIDL trajectory model
Vertical profile
O… PP
cL1
cL1
PP ORTO PP PP
cL1
cL1
cL1
cL1
cL1
cL1
cWP7WP1
cWP0:L1
WP0
WP1
WP4
WP5
WP6
WP7
iM.78
cV0
cAT1000
STHS MACH HS CAS
HSB
HLGSLG
cHIDL
x
HS CAS
iCAS 280
iCAS180
x x xc30%
c60%
c90%
x
HSB
HHL SHL HHL SHL HHL
LG DWNc
CAS>250x
SHL
iAT6000
WP4
x
C… OO
HA
C… OO
HS MACH
HT
HLG
HSB
HAR HAR
HT
HHL
MACH/CAS transition altitude
TOD
ST
cLIDL
WP5 WP6
CAS250 CAS220
WP4 WP5 WP6
WP7
RWY
Lateral profile
1 2 3 4 5 6 7 8 9 10 11 12 13 .. 15 .. 17 18 .. 20 21 .... 24
ORTO PP
FL240
3000 AGL
AT 1000 AGL
cAT3000:V1
cV0
CIRC OOCIRC PP
AR
LG
SB
HL
LAT
LON
PROP
Ops
Point Orto Circle
LL PP PR
OO PC OO
CP
CC
PS
PP
Helix
HELIX PSHELIX PS HELIX PP
WP2
WP3
CIRC OOORTO PPCIRC OOORTO PP
cWP3:L1cWP2:L1cWP1:L1c WP0
0.40.30.20.1
WP0
WP2
WP3
WP4
WP5
WP1
AOB 3000 AGL
ATA FL240
WP0
WP6WP7
AT 1000 AGL
Hippodrome Eight
OR
OC
PPR
PBR
PBP
c
WP1 WP2 WP0WP3 WP1
At (altitude) wih path angle
At (altitude)
At (altitude) or below (AOB)
At (altitude) or above (AOA)
Waypoint with bearing
Distance/time signaled waypoint
L2/V2 continuity symbol
L0/V0 continuity symbol
Reference fix/point
Waypoint (L0 continuity)
Waypoint with L1 continuity
Waypoint with L2 continuity
L1/V1 continuity symbol
Begin of AI instance
End of AI instance
Constraint trigger
i Inspective trigger
x Explicit trigger
Milestone
Diverter
Simultaneity link
Diversion link
AIDL – Abstract view
Latitude
Longitude
Altitude
Distance
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Mugin
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Outline
Model Predictive Control
Applications
Oil pipelines
UAV trajectories
Solar energy
45E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
46
•Accounts for about 98.6% of the Solar System's mass.
•The mean distance from the Earth is approximately 149,600,000 kilometres
•Its light travels this distance in 8 minutes and 19 seconds.
•Consists of hydrogen (74% of its mass, or 92% of its volume), helium (24% of
mass, 7% of volume),
Here comes the Sun
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
47
Solar radiation
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
48

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Available Power
49E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
50
The cosine factor
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
51
Extraterrestial daily solar radiation and
latitude
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Source INM
Average daily solar energy in Spain
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solar power systems covering the dark disks could
provide more than the world's total primary energy
demand (assuming a conversion efficiency of 8%)
53E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Use of solar energy

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Concentrating solar power:
Parabolic trough collectors
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solar towers
Abengoa solar PS20 tower
•1,255 mirrored heliostats
•531 feet-high tower
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
57
Six dish stirling systems,
in operation at the PSA
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Control problems in solar
systems
Collectors movement (sun tracking)
Slow
Open loop (almost)
Temperature and pressure control
Rich dynamics (PDEs, deadtimes, nonlinear, …)
High disturbances
Closed loop (almost)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 59
PS 10 (Abengoa)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Heliostat normal
60
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
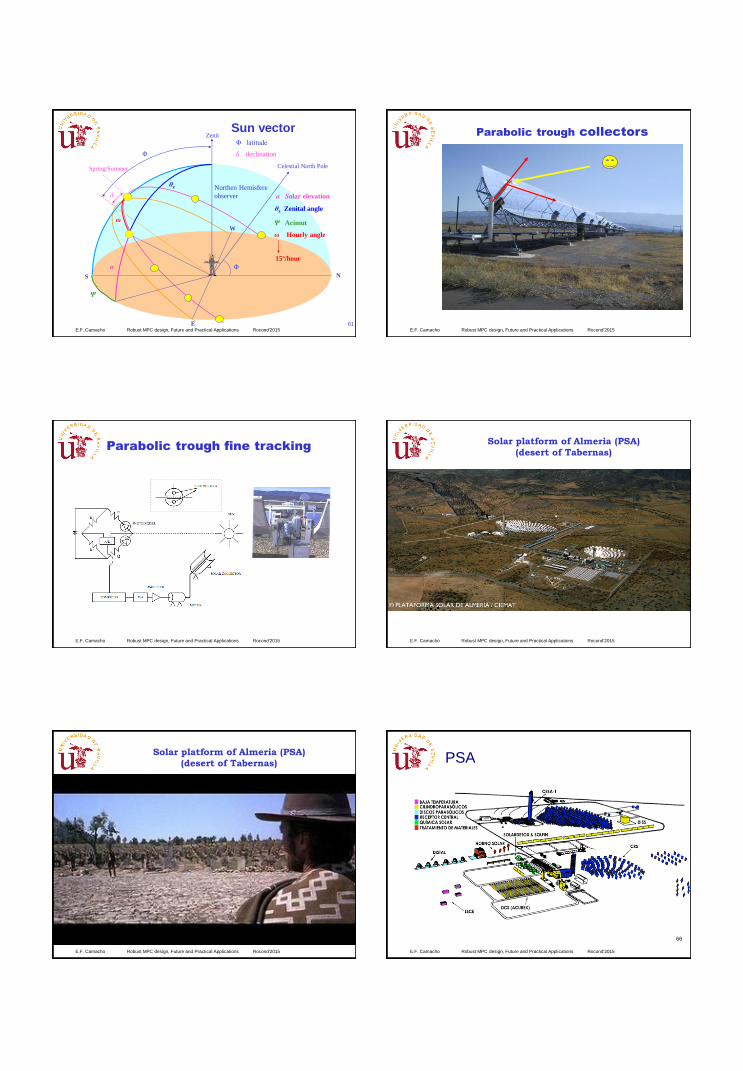
Celestial North PoleSpring/Summer
Φ
Northen Hemisfere
observer
Φ
Sun vectorZenit
S N
E
W
Ψ
δ
α
θz
θz Zenital angle
α Solar elevation
Ψ Acimut
δ declination
Φ latitude
ω
ω Hourly angle
15º/hour
61E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Parabolic trough collectors
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Parabolic trough fine tracking
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solar platform of Almeria (PSA)
(desert of Tabernas)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solar platform of Almeria (PSA)
(desert of Tabernas)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
66
PSA

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
67
GRAAL project:
Gamma ray observatory
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
68
• Heliostats direct the Cherenkov light generated by air-showers
arriving in the direction of the cosmic source
•(R. Plaga et al, 1999)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
69
Heliostat normal
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
70
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
71
Some feedback in heliostat solar tracking
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
72
Receiver feedback: uniform heating

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
73
Uniform receiver heating
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
74
Uniform receiver heating
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
75
Max temperature deviation
(manual operation)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
76
Max temperature deviation
(automatic mode)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
77
Heliostat calibration
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
78
Heliostat calibration

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
79
Blob centroid computation
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Plantas cilindro parabólicas
80
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
81
Acurex plant diagram
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Metal: ρm Cm Am ∂Tm / ∂t = ηo I G – G Hl (Tm-Ta) – LHt (Tm-Tf)
Fluid: ρf Cf Af ∂Tf / ∂t + ρf Cf q ∂Tf / ∂x = LHt (Tm-Tf)
Process model
Simulink model can be downloaded from:
E.F. Camacho, et al. Advanced Control of Solar Power Plants, Springer, 1997
http://www.esi2.us.es/~eduardo/libro-s/libro.html
82
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solar field
Parabolic trough
Outlet temp.Oil flow
Solar
radiation
Air
Temp.
Inlet oil
Temp.
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
84
Why controlling the solar plants is a challenge ?
The energy source is not a manipulated variable but a
perturbation !
Complex dynamics: Non linear, PDE, dead time, never at a
steady state
Constraints (operating closed to constraints)
Deciding the operating mode is part of the control strategy.

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
MPC and solar power plants
85E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Level 1: Planning (Power tracking)
86
maxmax
max
24
0
)(,)(
)(,0)(,0)(,0)(
)()()1)(()1(
)()()()(
)24()24()()()()(
ccdd
ststststst
stststststst
ststststdsun
stst
tt
pdccd
PtPPtP
PtPtPtptp
dtpdtptPtP
ctpctptPtP
ePtePtPtetPJ
•Given Psun(t) and Pc(t) compute Pd(t) which maximize J
•Every hour and decreasing control horizon
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Level 2:
Optimal operating points
Solar
radiation
Reflectivity
Solar
power
Day, hour
Thermal
losses
Net
thermal
power
Outlet oil
temperature
Inlet oil
temperature
Air
temperature,
…
Oil flow
Pumps
power
Generated
electrical
power
Net
electrical
power
x
x
xStored
Energy
Dynamical problem
87E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Level 2 PSA
Optimal electricity production (black) vs FixedTemp. 300ºC.
Increase of 200 KWh/day
Extrapolating to a 50MWe >>> 20 MWh/day >>> 6000 euros/day
88
E.F. Camacho, A.J. Gallego. Optimal operation in solar trough plants, Solar Energy, 2013.5
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
89
Level 3: Regulation.Many contributors and many control techniques !
R. Carmona (1985)
F.R. Rubio (1985)
J.A. Gutierrez (1987)
M. Hughes (1992)
M. Berenguel (1995)
J. Normey (1997)
M. R. Arahal (1997)
L. Valenzuela (2005)
E. Zarza (2005)
C. M. Cirre (2006)
M.P. Parte (2005)
I. Alvarado (2008)
….
• J. M. Lemos (1997)• E. Mosca (1998)• R.N. Silva (1997)• L.M. Rato (1997)• A.L. Cardoso (1999)• A. Dourado (1999)• T.A. Jonahansen (2000)• M. Brao (2000)• E. Juuso (2000)• I. Farkas (2002)• I. Vajk (2002)• L. Yebra (2005)• ….…
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
90
Feedforward compensation
Camacho, Rubio and Hughes. IEEE CSM, 1992

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
91
Why MPC in Solar ?
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
92
NMPC computation
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
93
Plant results: a clear day
Very fast setpoint tracking, little overshoot
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
94
Plant results: a cloudy day
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Unscented Kalman Filter
MPC
Control Predictivo de Sistemas de Energ´ıa Solar Distribuidos 80 / 81
Conclusiones y trabajos futuros
Lista de Publicaciones
1 A.J.Gallego, E.F. Camacho (2012,2013)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
PSA Acurex

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Spain (650 MWe)• Solucar (3x50MWe)
• Helioenergy (2x50MWe)
• Solacor (2x50MWe)
• Helios (2x50MWe)
• Solaben (4x50MWe)
USA (560 MWe)• Solana (280 MWe)
• Mojave (2x140 MWe)
South Africa (100 Mwe)• Kaxu (100 MWe)
Arabs Emirates• Sham1 (100 MWe)
Argelia• Hassi R'Mel (20MW)
Abengoa trough plants
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solucar (3x50MWe)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Solucar (3x50MWe)
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Parabolic trough plants
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
2011-2013 Modelling and simulation studies
2013 Plant tests (July-Aug)
Commissioning on first plant (Sept)
2013 Controller design, programming and commissioning on theremaining 12 plants including operator courses (Oct – Dec)
2015-2016 USA and South Africa plants
2014 Analysis of results and incidences (Jan-June)
Design of versión 2 and commissioning on 13 plants (July-Dec)
Development and commissioning

E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015 E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Conclusions
• MPC is being succesfully applied in many
fields
• Solar energy is looking bright
• But … needs to reduce costs and increase
availability.
• MPC helps to enable solar technolgy
E.F. Camacho Robust MPC design, Future and Practical Applications Rocond'2015
Thanks !
Some references:
E.F. Camacho and C. Bordons, Model Predictive Control,
Springer Verlag (1997, second edition 2004)
E.F. Camacho, M Berenguel, F.R. Rubio and D. Martinez,
Control of Solar Energy Systems, Springer, 2012. (2015 China
mainland)
E.F. Camacho, M Berenguel and F.R. Rubio. Advanced Control
of Solar Power Plants, Springer, 1977
Top Related