






Languages
Pages
Legal


Notes and Assignments for MAT-74506
Antti Valmari
Tampere University of Technology
2016-11-16
Point system. An assignment may be small, medium size, or big. It is marked
on the scale of 0 to 3, where 0 = rejected and 2 = normal quality answer. When
appropriate, instead of rejection, the student is given the chance to try again with
an improved talk or solution some other day.
General instructions for talks. Please prepare a talk that you would like to listen
yourself, assuming that you are interested in the problem of preventing, finding and
fixing bugs, focusing on methods that are on the research stage. Classical testing
as it is done routinely in the industry is outside the scope of the course.
For some topics, material is recommended on the course reading material web
page. Even in that case, you may use other material if you want.
The recommendable length of the talk is between 10 and 40 minutes, depending
on the amount of interesting material that you find. Of course, the length of the talk
is a factor in assessing whether it was a small, medium size, or big assignment.
You may either use your own laptop or bring the talk as a PDF file on a USB
memory stick. In the latter case, a laptop is available, but it lacks PowerPoint and
Internet connection.
1 Motivation for Model Checking
The purpose of these talks is to give intuition on what is the problem that model
checking (also called automatic verification) aims at solving. The most interesting
issue is the technicalities of the error. It is also interesting how the bug was found,
how it was fixed, and what kind and how much harm it caused.
1. Give a talk on the Therac 25 accidents.
2. Give a talk on the Pentium bug of 1995.
3. Give a talk on the Mars PathFinder reset problem.
4. Give a talk on some other software or hardware bug.
Notes and Assignments for MAT-74506 AV 2016-11-16 2
2 Definition of Petri Nets
The set of natural numbers is N= {0,1,2, . . .}.
A place/transition net is a 4-tuple (P,T,W,M) such that P∩T = /0, W is a func-
tion from (P×T )∪ (T ×P) to N, and M is a function from P to N. The elements
of P are places, the elements of T are transitions, W is the weight function, and
M is the initial marking. We will later introduce a distinction between “structural
transitions” and “semantic transitions”. In that classification, the elements of T are
structural transitions.
Place/transition nets are the most commonly used class of Petri nets both in
general and in this course. It is common to use the shorter name “Petri net” instead
of the clumsy but more precise “place/transition net”, and we will do so in this
course.
Let p ∈ P and t ∈ T . The pair (p, t) is an arc if and only if W (p, t) > 0. The
pair (t, p) is an arc if and only if W (t, p)> 0.
Places are drawn as circles, transitions are drawn as rectangles, and arcs are
drawn as arrows. The weight of an arc is 1 by default. A bigger weight is denoted
by drawing a small line across the arc and writing the weight next to it. A token is
a black dot drawn in a place. The initial marking is represented by drawing M(p)tokens into each place p.
Sometimes place/transition nets are defined as (P,T,F,W,M) where F ⊆ (P×T )∪(T ×P) and W is a function from F to {1,2,3, . . .}. The set F is called the flow
relation or the set of arcs. This definition is formally different from ours but yields
the same concept. The set F is obtained from our W as {(x,y) ∈ (P×T)∪(T ×P) |W (x,y) > 0}.
The input places of transition t are •t = {p ∈ P |W (p, t) > 0}, and its output
places are t• = {p ∈ P |W (t, p) > 0}. The input and output transitions of a place
are defined similarly.
A marking is a function from P to N. Transition t is enabled at a marking
M, denoted with M [t〉, if and only if ∀p ∈ P : M(p) ≥ W (p, t). The opposite of
enabled is disabled. If t is enabled at M, it may fire (also the word “occur” is used)
yielding a marking M′ such that ∀p ∈ P : M′(p) = M(p)−W(p, t)+W (t, p). This
is denoted with M [t〉 M′.
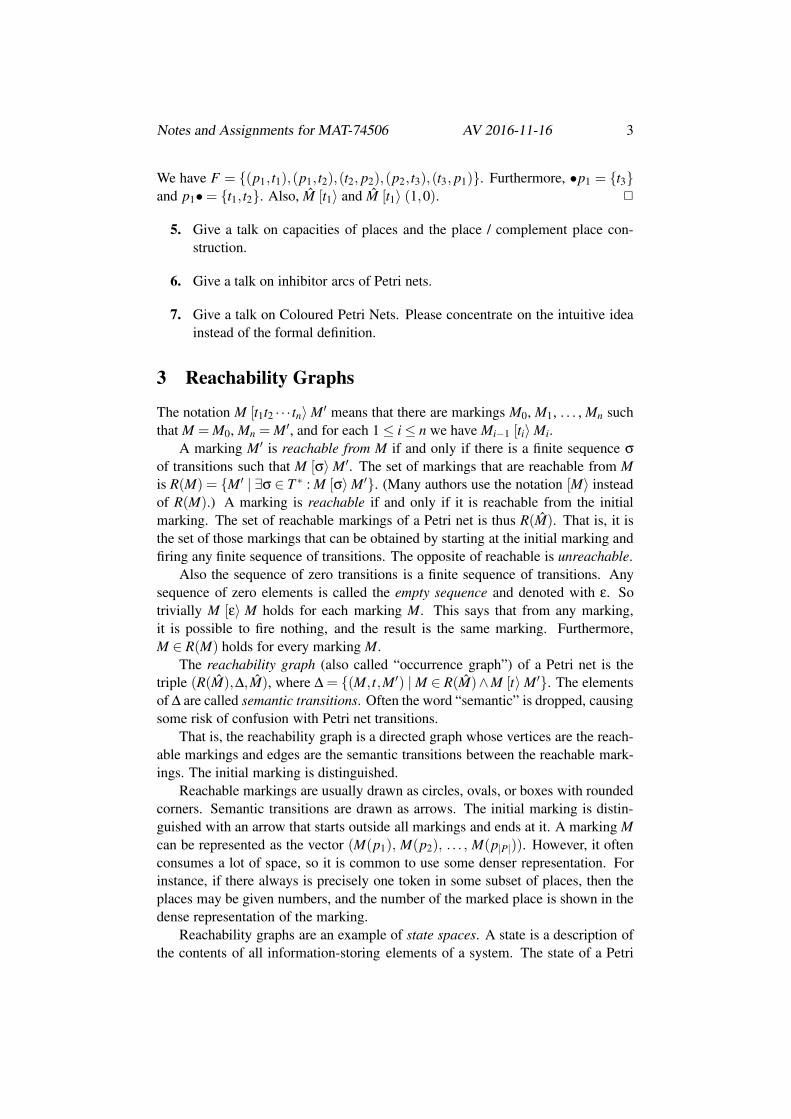
An example. Figure 1 left on page 4 shows a Petri net with
• P = {p1, p2},
• T = {t1, t2, t3},
• W (p1, t1)=W (p1, t2)=W (t2, p2)=W (p2, t3)=W (t3, p1)= 1 and W (p, t)=W (t, p) = 0 for the remaining place-transition pairs and the remaining tran-
sition-place pairs, and
• M = (2,0).
Notes and Assignments for MAT-74506 AV 2016-11-16 3
We have F = {(p1, t1),(p1, t2),(t2, p2),(p2, t3),(t3, p1)}. Furthermore, •p1 = {t3}and p1•= {t1, t2}. Also, M [t1〉 and M [t1〉 (1,0). ✷
5. Give a talk on capacities of places and the place / complement place con-
struction.
6. Give a talk on inhibitor arcs of Petri nets.
7. Give a talk on Coloured Petri Nets. Please concentrate on the intuitive idea
instead of the formal definition.
3 Reachability Graphs
The notation M [t1t2 · · · tn〉 M′ means that there are markings M0, M1, . . . , Mn such
that M = M0, Mn = M′, and for each 1 ≤ i ≤ n we have Mi−1 [ti〉 Mi.
A marking M′ is reachable from M if and only if there is a finite sequence σ
of transitions such that M [σ〉 M′. The set of markings that are reachable from M
is R(M) = {M′ | ∃σ ∈ T ∗ : M [σ〉 M′}. (Many authors use the notation [M〉 instead
of R(M).) A marking is reachable if and only if it is reachable from the initial
marking. The set of reachable markings of a Petri net is thus R(M). That is, it is
the set of those markings that can be obtained by starting at the initial marking and
firing any finite sequence of transitions. The opposite of reachable is unreachable.
Also the sequence of zero transitions is a finite sequence of transitions. Any
sequence of zero elements is called the empty sequence and denoted with ε. So
trivially M [ε〉 M holds for each marking M. This says that from any marking,
it is possible to fire nothing, and the result is the same marking. Furthermore,
M ∈ R(M) holds for every marking M.
The reachability graph (also called “occurrence graph”) of a Petri net is the
triple (R(M),∆,M), where ∆ = {(M, t,M′) | M ∈ R(M)∧M [t〉 M′}. The elements
of ∆ are called semantic transitions. Often the word “semantic” is dropped, causing
some risk of confusion with Petri net transitions.
That is, the reachability graph is a directed graph whose vertices are the reach-
able markings and edges are the semantic transitions between the reachable mark-
ings. The initial marking is distinguished.
Reachable markings are usually drawn as circles, ovals, or boxes with rounded
corners. Semantic transitions are drawn as arrows. The initial marking is distin-
guished with an arrow that starts outside all markings and ends at it. A marking M
can be represented as the vector (M(p1), M(p2), . . . , M(p|P|)). However, it often
consumes a lot of space, so it is common to use some denser representation. For
instance, if there always is precisely one token in some subset of places, then the
places may be given numbers, and the number of the marked place is shown in the
dense representation of the marking.
Reachability graphs are an example of state spaces. A state is a description of
the contents of all information-storing elements of a system. The state of a Petri

Notes and Assignments for MAT-74506 AV 2016-11-16 4
p1
p2
t1
t2 t3
t1 t1
t1t2 t3 t2 t3
t2 t3
2,0
1,1
0,2
1,0
0,1
0,0
Figure 1: An example Petri net and its reachability graph.
net is the marking. The phrase “state space” is often used informally to mean either
the set of the reachable states of a system or the directed graph that consists of the
reachable states and the semantic transitions between them.
An example. Figure 1 shows an example of a Petri net and its reachability graph.
In the example,
• R(M) = {(0,0),(0,1),(0,2),(1,0),(1,1),(2,0)},
• ∆ = {((2,0), t1,(1,0)),((1,0), t1 ,(0,0)),((2,0), t2 ,(1,1)), . . .}, and
• M = (2,0).
We have (2,0) [t2t1t3〉 (1,0). The marking (0,2) is reachable, but not reachable
from (0,1). The marking (1,2) is unreachable. ✷
8. Draw the reachability graph of this Petri net.
2 3
a b c
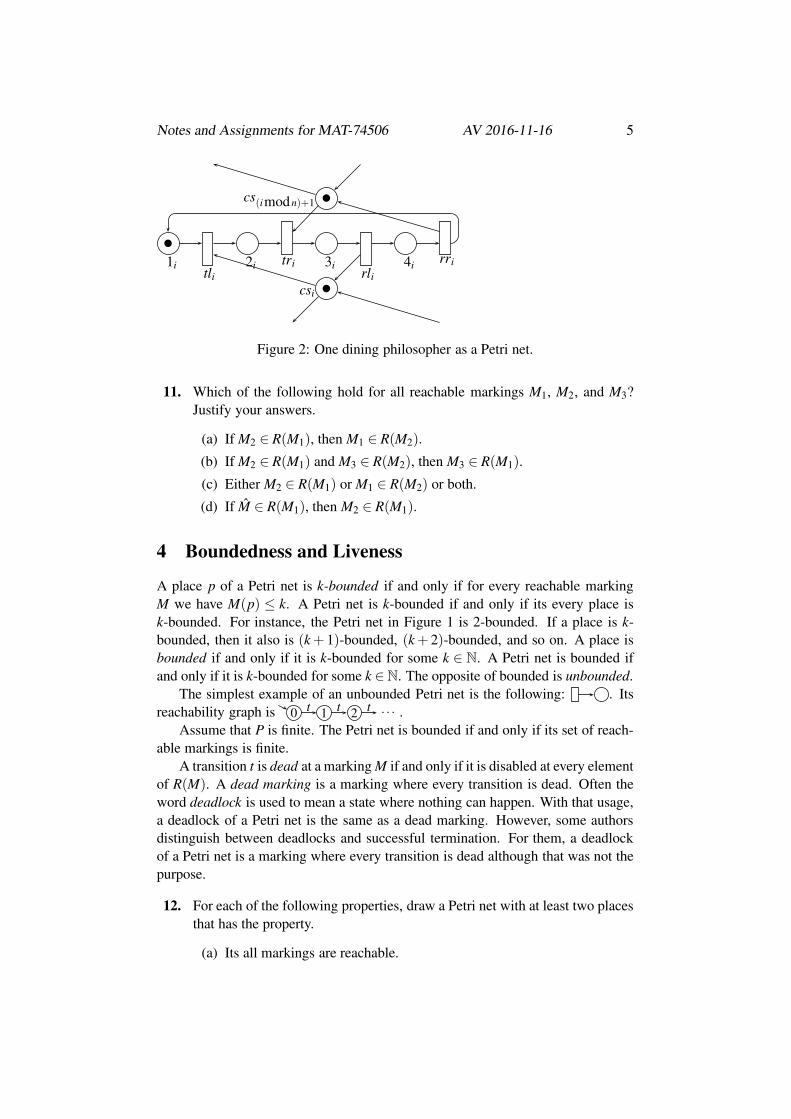
9. The Dining Philosophers’ system consists of n philosophers and n chop
sticks around a round table. Between each philosopher and the next philoso-
pher there is one chop stick. The life of each philosopher is like the follow-
ing:
1: take the chop stick from the left (wait if it is not there)
2: take the chop stick from the right (wait if it is not there)
3: return the chop stick to the left
4: return the chop stick to the right; goto 1
Local state 1 is also known as “thinking”, 2 as “has left”, 3 as “eating”, and 4
as “has right stick”. Philosopher i and the adjacent chop sticks are shown in
Figure 2 as a Petri net. Draw the reachability graph of the one philosophers’
system and of the two philosophers’ system.
10. Draw the reachability graph of the three philosophers’ system.
Notes and Assignments for MAT-74506 AV 2016-11-16 5
1itli
2i tri 3irli
4irri
csi
cs(imodn)+1
Figure 2: One dining philosopher as a Petri net.
11. Which of the following hold for all reachable markings M1, M2, and M3?
Justify your answers.
(a) If M2 ∈ R(M1), then M1 ∈ R(M2).
(b) If M2 ∈ R(M1) and M3 ∈ R(M2), then M3 ∈ R(M1).
(c) Either M2 ∈ R(M1) or M1 ∈ R(M2) or both.
(d) If M ∈ R(M1), then M2 ∈ R(M1).
4 Boundedness and Liveness
A place p of a Petri net is k-bounded if and only if for every reachable marking
M we have M(p) ≤ k. A Petri net is k-bounded if and only if its every place is
k-bounded. For instance, the Petri net in Figure 1 is 2-bounded. If a place is k-
bounded, then it also is (k+ 1)-bounded, (k+ 2)-bounded, and so on. A place is
bounded if and only if it is k-bounded for some k ∈ N. A Petri net is bounded if
and only if it is k-bounded for some k ∈N. The opposite of bounded is unbounded.
The simplest example of an unbounded Petri net is the following: . Its
reachability graph is t t t0 1 2 · · · .
Assume that P is finite. The Petri net is bounded if and only if its set of reach-
able markings is finite.
A transition t is dead at a marking M if and only if it is disabled at every element
of R(M). A dead marking is a marking where every transition is dead. Often the
word deadlock is used to mean a state where nothing can happen. With that usage,
a deadlock of a Petri net is the same as a dead marking. However, some authors
distinguish between deadlocks and successful termination. For them, a deadlock
of a Petri net is a marking where every transition is dead although that was not the
purpose.
12. For each of the following properties, draw a Petri net with at least two places
that has the property.
(a) Its all markings are reachable.
Notes and Assignments for MAT-74506 AV 2016-11-16 6
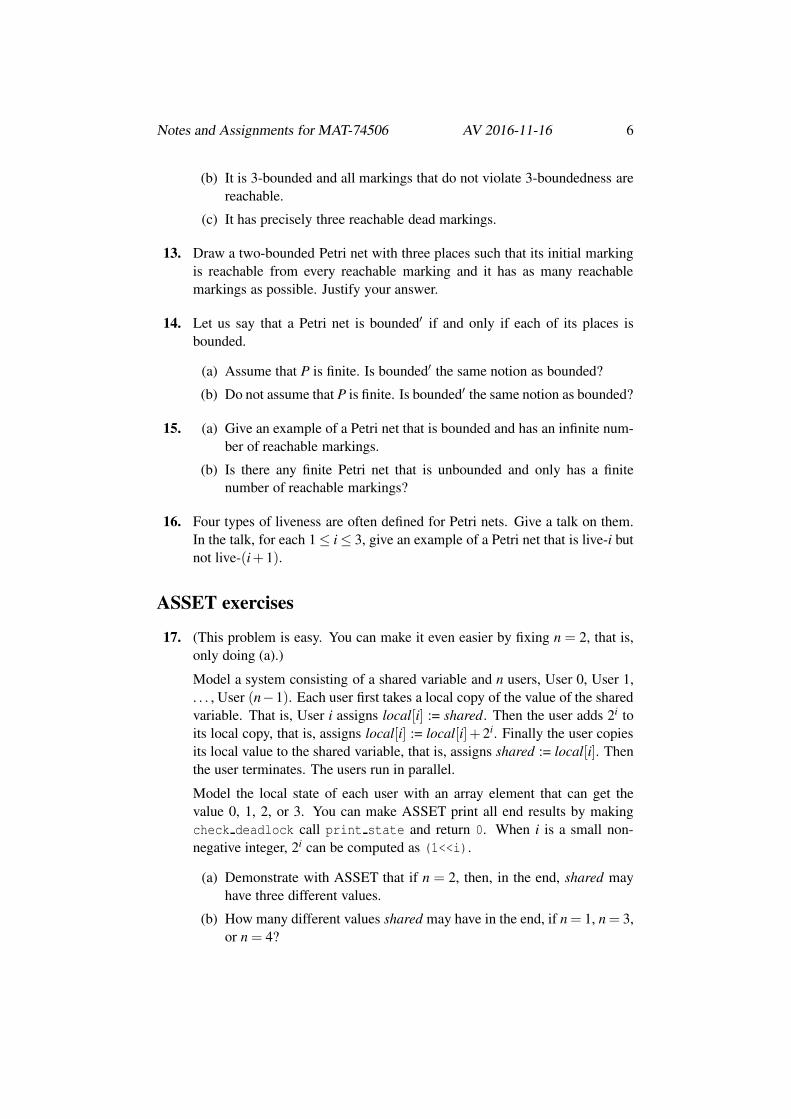
(b) It is 3-bounded and all markings that do not violate 3-boundedness are
reachable.
(c) It has precisely three reachable dead markings.
13. Draw a two-bounded Petri net with three places such that its initial marking
is reachable from every reachable marking and it has as many reachable
markings as possible. Justify your answer.
14. Let us say that a Petri net is bounded′ if and only if each of its places is
bounded.
(a) Assume that P is finite. Is bounded′ the same notion as bounded?
(b) Do not assume that P is finite. Is bounded′ the same notion as bounded?
15. (a) Give an example of a Petri net that is bounded and has an infinite num-
ber of reachable markings.
(b) Is there any finite Petri net that is unbounded and only has a finite
number of reachable markings?
16. Four types of liveness are often defined for Petri nets. Give a talk on them.
In the talk, for each 1 ≤ i ≤ 3, give an example of a Petri net that is live-i but
not live-(i+1).
ASSET exercises
17. (This problem is easy. You can make it even easier by fixing n = 2, that is,
only doing (a).)
Model a system consisting of a shared variable and n users, User 0, User 1,
. . . , User (n−1). Each user first takes a local copy of the value of the shared
variable. That is, User i assigns local[i] := shared. Then the user adds 2i to
its local copy, that is, assigns local[i] := local[i]+2i. Finally the user copies
its local value to the shared variable, that is, assigns shared := local[i]. Then
the user terminates. The users run in parallel.
Model the local state of each user with an array element that can get the
value 0, 1, 2, or 3. You can make ASSET print all end results by making
check deadlock call print state and return 0. When i is a small non-
negative integer, 2i can be computed as (1<<i).
(a) Demonstrate with ASSET that if n = 2, then, in the end, shared may
have three different values.
(b) How many different values shared may have in the end, if n = 1, n = 3,
or n = 4?

Notes and Assignments for MAT-74506 AV 2016-11-16 7
#define chk_deadlock
const char * check_deadlock(){ return "Illegal deadlock"; }
bool fire_transition( unsigned tr ){
if( tr < 2 ){
if( cli[ tr ] == 0 ){ req[ tr ] = 1; cli[ tr ] = 1; return true; }
if( cli[ tr ] == 1 && gra[ tr ] ){ cli[ tr ] = 2; return true; }
if( cli[ tr ] == 2 ){ req[ tr ] = 0; cli[ tr ] = 0; return true; }
}else{
tr -= 2;
if( server == 0 && req[ tr ] ){ server = 1+tr; return true; }
if( server == 1+tr ){ gra[ tr ] = 1; server = 3+tr; return true; }
if( server == 3+tr && !req[ tr ] ){ server = 5+tr; return true; }
if( server == 5+tr ){ gra[ tr ] = 0; server = 0; return true; }
}
return false;
}
Figure 3: A part of a faulty two-step handshake.
18. (Easy) Figure 3 shows a part of a model of a faulty mutual exclusion system
that consists of a server and two clients. Between Client i (i ∈ {0,1}) and the
server there are two variables, req[i] and gra[i]. Client i requests for access
to the critical section by assigning req[i] := 1. The server grants access by
assigning gra[i] := 1. When Client i leaves the critical section, it assigns
req[i] := 0 and goes back to its initial state. The server reacts to this by
assigning gra[i] := 0. Because the system models low-level hardware, each
transition can do altogether at most one operation (testing, reading, writing)
on the shared variables. For instance, the same transition cannot both detect
that req[0] = 1 and assign gra[0] := 1.
Complete the model. Then detect with ASSET that the model does not guar-
antee mutual exclusion. Finally, fix the model and verify with ASSET that
now it does guarantee mutual exclusion. A transition may access at most one
shared variable and do at most one operation (test, read, write) to it.
19. A camel can walk one camel-distance in a day. A desert is 12 camel-dis-
tances wide. The camel and its rider consume one unit of resources (water,
food, etc.) each day. The camel can carry 6 units in addition to the rider.
For instance, the camel can take 6 units of resources, walk 2 days into the
desert consuming 2 units of resources, leave 2 units there, and walk back
consuming the last 2 of the 6 units that it originally took. Later on the camel
can use the resources that had been left in the desert. How many units of
resources are needed to cross the desert?
20. A ring consists of n squares, where n ≥ 10. Find the smallest n such that the
following is possible. A grasshopper is on one of the squares. Nine squares
Notes and Assignments for MAT-74506 AV 2016-11-16 8
& ¬
& ¬
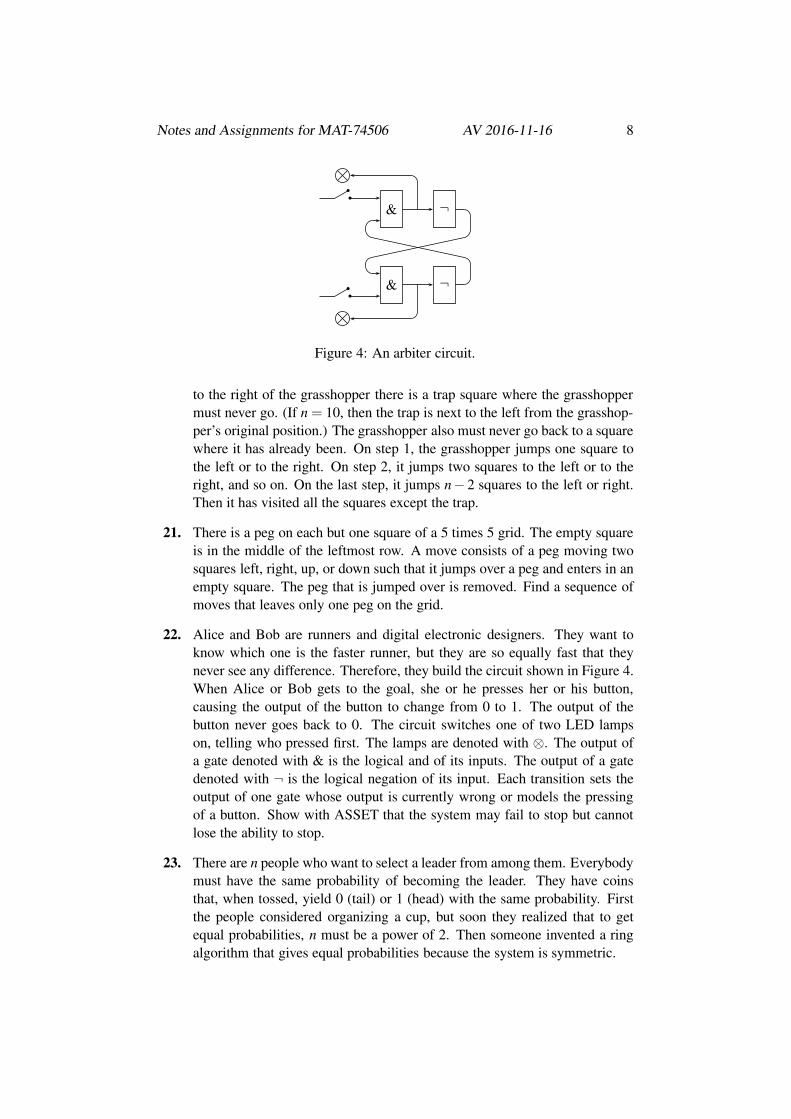
Figure 4: An arbiter circuit.
to the right of the grasshopper there is a trap square where the grasshopper
must never go. (If n = 10, then the trap is next to the left from the grasshop-
per’s original position.) The grasshopper also must never go back to a square
where it has already been. On step 1, the grasshopper jumps one square to
the left or to the right. On step 2, it jumps two squares to the left or to the
right, and so on. On the last step, it jumps n− 2 squares to the left or right.
Then it has visited all the squares except the trap.
21. There is a peg on each but one square of a 5 times 5 grid. The empty square
is in the middle of the leftmost row. A move consists of a peg moving two
squares left, right, up, or down such that it jumps over a peg and enters in an
empty square. The peg that is jumped over is removed. Find a sequence of
moves that leaves only one peg on the grid.
22. Alice and Bob are runners and digital electronic designers. They want to
know which one is the faster runner, but they are so equally fast that they
never see any difference. Therefore, they build the circuit shown in Figure 4.
When Alice or Bob gets to the goal, she or he presses her or his button,
causing the output of the button to change from 0 to 1. The output of the
button never goes back to 0. The circuit switches one of two LED lamps
on, telling who pressed first. The lamps are denoted with ⊗. The output of
a gate denoted with & is the logical and of its inputs. The output of a gate
denoted with ¬ is the logical negation of its input. Each transition sets the
output of one gate whose output is currently wrong or models the pressing
of a button. Show with ASSET that the system may fail to stop but cannot
lose the ability to stop.
23. There are n people who want to select a leader from among them. Everybody
must have the same probability of becoming the leader. They have coins
that, when tossed, yield 0 (tail) or 1 (head) with the same probability. First
the people considered organizing a cup, but soon they realized that to get
equal probabilities, n must be a power of 2. Then someone invented a ring
algorithm that gives equal probabilities because the system is symmetric.

Notes and Assignments for MAT-74506 AV 2016-11-16 9
Client i
0: ri := T [] goto 4
1: wait gi
2: ri := F
3: wait ¬gi; goto 0
4:
Server i
0: get token from previous server
1: if ¬ri then goto 5
2: gi := T
3: wait ¬ri
4: gi := F; goto 1
5: give token to next server; goto 0
Figure 5: The client and server of a token ring.
The people form a ring. Everyone can communicate with the previous and
the next person in the ring, but not with the others. Everyone has a suggestion
for the leader. Initially everyone suggests her- or himself. At any time, if two
adjacent people have different suggestions, they may agree on a common
suggestion by tossing a coin. The loser copies the suggestion of the winner
to itself. A transition may only access the variables of two adjacent persons,
but it may test, read from, and write to the variables of those two persons as
much as you want.
(a) For three different values of n that must be at least 3 (other than this,
you may choose them freely), show with ASSET that the system may
fail to stop but cannot lose the ability to stop.
(b) Show mathematically that when n is not a power of 2, there is no al-
gorithm that is guaranteed to stop and where everybody has the same
probability of becoming the leader.
24. (Not easy) The people tried the algorithm developed in the previous exercise
and realized that they cannot find out when it has stopped. Modify the algo-
rithm such that in the end, everyone agrees on the leader and everyone knows
that the leader has been found. A transition may only access the variables of
two adjacent persons, but it may test, read from, and write to the variables of
those two persons as much as you want.
25. A token-ring mutual exclusion system consists of n clients and n servers,
shown in Figure 5. Each client and server communicate via two Boolean
variables ri and gi. “xxx [] yyy” means that the process executes either xxx or
yyy.
(a) Write an ASSET model of the system with a check state function that
verifies mutual exclusion, check deadlock that verifies that each client has
terminated properly, and is may progress that verifies that client 0 cannot
be blocked into the state where it has requested for access to the critical
section but is not yet in the critical section.
(b) Demonstrate that if there are initially no tokens in the ring, the system works
incorrectly. Explain the error.

Notes and Assignments for MAT-74506 AV 2016-11-16 10
(c) Demonstrate that if there is initially one token in the ring, the system works
correctly.
(d) Demonstrate that if there are initially two tokens in the ring, the system
works incorrectly. Explain the error.
(e) Demonstrate that if there is initially one token in the ring and must-progress
is required instead of may-progress, the system works incorrectly. Explain
the error.
26. Modify the system of item (e) of the previous exercise so that although must-
progress is required, it works correctly.
27. Replace line 1 of the servers in the previous exercise by “wait ri”.
(a) Demonstrate that the system works incorrectly. Explain the error.
(b) Demonstrate that if “[] goto 4” is removed from the clients, then ASSET
detects no errors. Explain why the error is not detected.
5 Strong Components
A strong component of a directed graph is a maximal nonempty set of vertices such
that for any two vertices in the set, there is a path from the first to the second and a
path from the second to the first. Also a longer name maximal strongly connected
component is used. Each vertex belongs to precisely one strong component.
In the case of the reachability graph of a Petri net, if M ∈ R(M), then the strong
component that M belongs to is {M′ | M′ ∈ R(M)∧M ∈ R(M′)}.
Concurrent systems are often expected to be able to run indefinitely long: after
giving money to some customer, a cash dispenser should be able to give money
to the next customer; and after carrying one customer to some floor, a lift should
be ready to carry the next customer. Therefore, at least as seen from the outside,
the system must always be able to come back where it was and do the same thing
again.
On the other hand, it follows immediately from the definition of strong com-
ponents that if a system leaves a strong component, then it cannot come back.
Therefore, the existence of more than one strong component may be a sign of an
error. However, there are also legal reasons for extra strong components. For in-
stance, if the system can be switched off, then it correctly has a chain of strong
components leading to a dead state. Strong component analysis has been used as
a method of finding errors of certain kinds. However, nowadays there are better
methods that do not yield false positives.
A strong component C is terminal if and only if the system cannot leave it.
That is, if M ∈C and M [t〉M′, then also M′ ∈C. The opposite is nonterminal. A
strong component C is acyclic if and only if every edge that starts at it leaves it.

Notes and Assignments for MAT-74506 AV 2016-11-16 11
1 Found := {M}; Work := {M}2 while Work 6= /0 do
3 choose some M ∈ Work
4 if M has no transitions left then Work := Work \{M}; goto 2
5 let t be the next transition at M
6 if ¬M [t〉 then goto 2
7 let M′ be the marking such that M [t〉M′
8 if M′ /∈ Found then Found := Found∪{M′}; Work := Work∪{M′}9 ∆ := ∆∪{(M, t,M′)}
Figure 6: The basic reachability graph construction algorithm.
The opposite is cyclic. That is, C is cyclic if and only if it contains two markings
M and M′ such that there is t such that M [t〉M′. Here M and M′ are not necessarily
different.
28. Draw a directed graph such that its every vertex is reachable from the vertex
that you draw first, and it has precisely four strong components. One of the
components is terminal cyclic, one is terminal acyclic, one is nonterminal
cyclic, and one is nonterminal acyclic.
29. Give a talk on efficient algorithms for finding strong components.
6 Constructing Reachability Graphs
Figure 6 shows the principle of the construction of reachability graphs. There are
two main data structures: Found keeps track of the markings that have been found,
and Work keeps track of work that still has to be done. Each marking in Work keeps
track of which transitions have been tried at the marking.
Initially only M has been found. Because it has not yet been investigated, it
is put to Work. The main loop starts by picking some marking M from Work and
checking whether all transitions have been investigated at it. If yes, then M has
been fully investigated and is removed from Work. In the opposite case, the first
transition that has not yet been investigated at M is chosen. If it is enabled, it is
fired. If the resulting marking has not yet been found, it is added to Found and
Work. On line 9, the edge is added to the set of edges. The set ∆ and line 9 can be
dropped from the algorithm if ∆ is not needed.
We see that always when a new marking is found, it is put to both Found and
Work. It stays permanently in Found. While it is in Work, each transition is tried at
it in an unspecified order. When every transition has been tried at it, it is removed
from Work.
Often the order in which markings are chosen on line 3 is specified. In breadth-
first search, always the marking that has been the longest time in Work is chosen.
That is, Work operates as a first-in first-out queue. Such an implementation may

Notes and Assignments for MAT-74506 AV 2016-11-16 12
try the transitions in a for-loop instead of going from lines 6 and 9 back to line 2
to pick the next transition.
In depth-first search, always the marking that has been the shortest time in
Work is chosen. That is, Work is used as a stack. The execution must go back to
line 2 after each firing of a transition. Depth-first search has a simple recursive im-
plementation where Work is not implemented explicitly. Unfortunately, recursion
reduces speed and increases memory consumption. Construction of reachability
graphs is often a bottleneck, so its implementation should be as efficient as possi-
ble.
Always Work ⊆ Found. Usually Found is implemented as a hash table. The
implementations of Work vary a lot. Although in the abstract representation both
Found and Work contain markings, memory can be saved by making Work contain
pointers to markings instead of markings, so that the markings are not stored twice.
Tried transitions can be kept track of by adding an extra field to the marking record
that stores the number of (or a pointer to) the transition that was tried last.
In addition to the state of the system as a whole, it is often handy to talk about
the state of an individual component. To distinguish between these two uses, the
state of the system as a whole is called the global state and the state of an individual
component is a local state.
30. Write a breadth-first reachability graph construction algorithm and a recur-
sive depth-first reachability graph construction algorithm. Only show the
same level of detail as Figure 6 shows.
31. Give a talk on Sections 1 to 6 of “What the Small Rubik’s Cube . . . ” in the
reading material.
32. Give a talk on Sections 7 to 11 of “What the Small Rubik’s Cube . . . ” in the
reading material.
33. Draw the reachability graph of Peterson’s mutual exclusion algorithm, as
found in Valmari & Setala: Visual Verification of Safety and Liveness.
34. Consider the Dining Philosophers’ system.
(a) Design a representation of the global state. Try to use as few bits as
possible. How many bits (as a function of n) are used?
(b) Assume that the local states of the philosophers and chop sticks are
stored in int Ph[n] and int Cs[n] , respectively. Write program
code for packing and unpacking the state.
(c) Derive an upper bound to the number of reachable states as a function
of n.
35. A simplified version of the alternating bit protocol over unreliable channels
consists of a sender S, a receiver R, and two channels D and A. The purpose
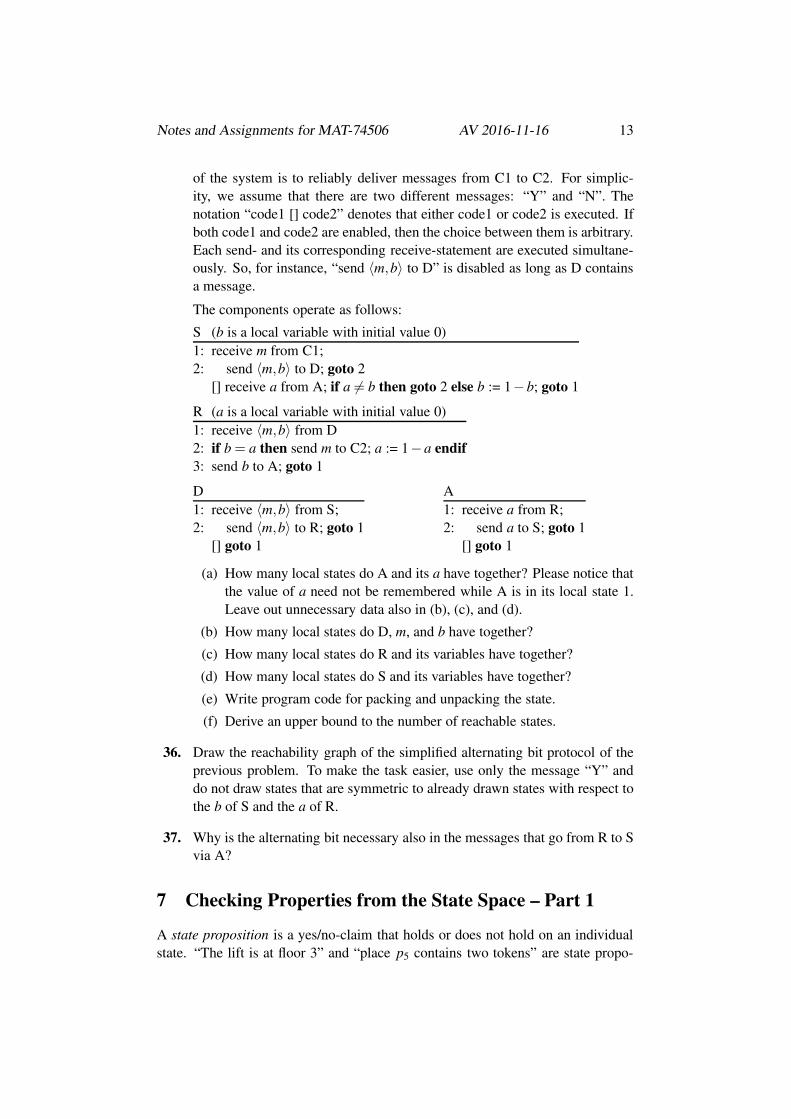
Notes and Assignments for MAT-74506 AV 2016-11-16 13
of the system is to reliably deliver messages from C1 to C2. For simplic-
ity, we assume that there are two different messages: “Y” and “N”. The
notation “code1 [] code2” denotes that either code1 or code2 is executed. If
both code1 and code2 are enabled, then the choice between them is arbitrary.
Each send- and its corresponding receive-statement are executed simultane-
ously. So, for instance, “send 〈m,b〉 to D” is disabled as long as D contains
a message.
The components operate as follows:
S (b is a local variable with initial value 0)
1: receive m from C1;
2: send 〈m,b〉 to D; goto 2
[] receive a from A; if a 6= b then goto 2 else b := 1−b; goto 1
R (a is a local variable with initial value 0)
1: receive 〈m,b〉 from D
2: if b = a then send m to C2; a := 1−a endif
3: send b to A; goto 1
D
1: receive 〈m,b〉 from S;
2: send 〈m,b〉 to R; goto 1
[] goto 1
A
1: receive a from R;
2: send a to S; goto 1
[] goto 1
(a) How many local states do A and its a have together? Please notice that
the value of a need not be remembered while A is in its local state 1.
Leave out unnecessary data also in (b), (c), and (d).
(b) How many local states do D, m, and b have together?
(c) How many local states do R and its variables have together?
(d) How many local states do S and its variables have together?
(e) Write program code for packing and unpacking the state.
(f) Derive an upper bound to the number of reachable states.
36. Draw the reachability graph of the simplified alternating bit protocol of the
previous problem. To make the task easier, use only the message “Y” and
do not draw states that are symmetric to already drawn states with respect to
the b of S and the a of R.
37. Why is the alternating bit necessary also in the messages that go from R to S
via A?
7 Checking Properties from the State Space – Part 1
A state proposition is a yes/no-claim that holds or does not hold on an individual
state. “The lift is at floor 3” and “place p5 contains two tokens” are state propo-
Notes and Assignments for MAT-74506 AV 2016-11-16 14
sitions. “The lift will be at floor 3 some time in the future” and “in all reachable
markings, p5 contains at most two tokens” are not state propositions.
There are rich languages for expressing state propositions and complicated al-
gorithms for checking whether or not a given state proposition holds on a given
state. However, from the point of view of model checking they are a separate prob-
lem area that does not interfere much with the hard problems of model checking.
Research on languages, parsing, etc., has provided good tools for expressing state
propositions and checking whether they hold. In model checking, it is typically
just assumed that there is a set of state propositions and a practical way of deciding
whether s |= π, that is, whether state proposition π holds on state s.
A complementary way of encoding “elementary” information for model check-
ing is visible labels of structural transitions. That is, a structural transition (e.g., an
atomic statement of the program code or a Petri net transition) is given a name that
reflects its role in the service provided by the system. “The lift opens its doors” or
“20 euros are given to the customer” are examples. More than one transition may
have the same label.
Typically many transitions lack visible labels, because what they do is not im-
mediately visible to the user. An example is the transition with which the cash
dispenser sends the “20 euro withdraw request” message to the bank. Such transi-
tions are invisible. It is handy to reserve a special label for denoting the absence of
a visible label. Often τ is used for this purpose. So when we say that the label of
a transition is τ or that the transition is invisible, we mean that the transition does
not have a label that tells about its role.
Often it is easy to replace state propositions by visible labels. For instance, “the
lift is at floor 3” can be replaced by “the lift arrives floor 3” and “the lift leaves floor
3”. Replacing visible labels by state propositions may require adding one or more
variables to which visible transitions store information. For instance, a variable
may remember the most recent withdraw request that the user of a cash dispenser
has made.
Properties that refer to the history of the state can often be encoded as state
propositions by adding suitable code to the model, analogously to adding test code
or testing equipment to a real system. Consider the cash dispenser again. Assume
that when the customer makes a withdraw request, the amount is stored in an extra
variable. Later, when the money is given, the given amount can be compared to
the requested amount and a state proposition can be set to True if they are not the
same.
The idea of collecting information from the history and detecting that it obeys
some specific pattern is the idea behind classical finite automata. Indeed, finite
automata can be used in model checking by synchronising the automaton with (a
subset of) visible labels. However, it is often easier to implement the collection
and analysis of the history information in ordinary program code, using the same
language as for modelling the system under analysis.
Instead of detecting the error from some state proposition or some formula
on state propositions becoming True, the error may be detected from some error

Notes and Assignments for MAT-74506 AV 2016-11-16 15
detection transition becoming enabled. An error detection transition is a structural
transition that has been added to the system for this purpose. A natural candidate
is the transition that sees that the requested and given amounts of money are not
the same.
From now on it is assumed that some mechanism for checking individual states
exists. It is not important whether it is based on individual state propositions,
formulae on states, or error detection transitions.
In the state space construction algorithm, the best place to check a state against
errors is immediately after it has been detected that it is not in Found (line 8 in
Figure 6). In general, it is better to detect errors as early as possible, because
otherwise it may happen that the erroneous state has been constructed after the first
ten minutes but is detected only after ten hours. On the other hand, testing that the
state is not in Found is fast. By doing it first, the algorithm avoids checking the
same state against errors each time it is found anew.
If the tool reveals, for instance, that a banking system can take money from a
wrong account, the user of the tool typically wants to analyse how that can happen.
For that, a counterexample is often helpful. It is a path from the initial state to the
error, listing the details of the states along the path, the full names of the structural
transitions whose occurrences caused the edges of the path, or both. Breadth-first
search yields as short counterexamples as possible. Depth-first search tends to
yield long counterexamples that contain also many events that have nothing to do
with the error.
38. Add code to the alternating bit protocol that checks that the message that is
received is the same as the message that was sent. It communicates with the
protocol via the statements “send m to S” and “receive m from R”. Assume
that the language contains the statement error “text” with which errors can
be signalled.
39. A building has n floors. At each floor there are buttons △ (up) and ▽ (down)
with the two obvious exceptions. Inside the lift cage there is a button for each
floor. For each floor, a signal is available that tells that the lift stopped at that
floor. Ignore the opening and closing of the doors. Write code that checks
that the lift stops at the right floors.
40. Consider the n dining philosophers’ system as described in an earlier exer-
cise. How long is the shortest path from the initial state to the deadlock?
How long is the path constructed by depth-first search, assuming that the al-
gorithm tries first the transitions of philosopher 1, then of philosopher 2, and
so on? If you cannot solve this problem for n in general, solve it for n = 2
and n = 3.
41. Download the simple model checker and the alternating bit protocol model
from the course web page. By modifying the model, running the checker,
and analysing the result, answer the following questions.

Notes and Assignments for MAT-74506 AV 2016-11-16 16
(a) What goes wrong, if the data channel does not have the alternating
bit? (Hint: comment out the checking that the data message carries the
right bit value, and the transition that receives the data message with
the wrong bit value.)
(b) What goes wrong, if the acknowledgement channel does not have the
alternating bit?
(c) Can something go wrong, if the channels cannot lose messages?
42. Make changes to the alternating bit protocol model that do not invalidate it
for model checking but do reduce the size of its state space. How small can
you make it?
43. Modify the alternating bit protocol model by merging the states on both sides
of the sender timeout transition. Does it work correctly? Does it work cor-
rectly, if the channels cannot lose messages?
44. Write a new model for the alternating bit protocol that only uses a small
number of transition numbers. For instance, all transitions of the receiver
may have the same number, because more than one of them are never simul-
taneously enabled.
45. Model a lift for the simple model checker. The building must have at least
four floors. The model must contain at least one component for the lift cage
and at least one component for the software that receives signals from the
buttons and floor sensors and sends commands to the motor that moves the
lift cage up and down.
8 Checking Properties from the State Space – Part 2
The machinery of the previous section suffices for verifying so-called safety prop-
erties, that is, detecting if something happens that should not happen. It does not
suffice for verifying so-called liveness or progress properties, that is, detecting if
something fails to happen that should happen. For instance, that the lift does not
stop at a wrong floor is a safety property, because if the lift stops at a wrong floor
then one can say that now the property is violated. That the lift eventually arrives
is a liveness property, because even if it has not yet arrived, it is possible that it will
arrive in the next five seconds, five minutes, or five centuries.
It is typical of liveness properties that in real life it is never possible to say that
the property has been violated. However, it is often possible to detect violations
of liveness properties from state spaces, by detecting infinite executions where the
awaited thing (like the arrival of the lift) does not happen. So liveness proper-
ties can never be tested, although they can often be model-checked. In real life,
violations of liveness properties manifest themselves by the system not respond-
ing within a “reasonable” time. What we really want is not liveness but “short
Notes and Assignments for MAT-74506 AV 2016-11-16 17
enough” response times. However, liveness is often a reasonable abstraction for
“quickly enough”. This is similar to the fact that often in programming, integers
are discussed instead of 32-bit integers.
At this stage it is appropriate to give a warning: in Petri net literature, the
concept of “safe Petri net” has been defined, but it is not the same as the safety that
has been discussed above.
We saw in the previous section that it is easy to make state space construction
tools detect violations of safety properties. Another class of easily detectable error
situations consists of illegal deadlocks. It suffices that some specific state propo-
sition or formula tells whether termination is allowed. Each time when the tool
detects that a state does not have enabled transitions, it checks whether the formula
yields True. If it does not, the tool reports an illegal deadlock.
Literature disagrees on whether freedom from illegal deadlocks is a safety
property. The opinion of the present author is that it is better to consider it as a
class of its own, but if it must be classified as safety or liveness, it is liveness.
Non-progress is a subclass of relatively easily detectable liveness errors. The
structural transitions of the system are divided to two classes: ordinary transitions
and progress transitions. For instance, the visible transitions may be declared as
progress transitions while the invisible transitions are ordinary. The question is
then “does the state space contain a non-progress cycle, that is, a cycle such that all
edges in it are caused by occurrences of ordinary transitions?” The counterexample
consists of a sequence that leads from the initial state to a non-progress cycle,
followed by the cycle. The same idea can be implemented using states instead
of transitions. In the simple model checker, such states are called “must-type”
progress states.
Liveness properties often depend on complicated assumptions. For instance, if
a channel can lose messages without limit, then it is impossible to guarantee that
a protocol always eventually delivers the message that it was given for delivery.
Therefore, it is often assumed that the channel can only lose a finite number of
messages in a row. This is an example of a strong fairness assumption: if some
transition is enabled infinitely often (the transition that represents correct channel
operation), then it is executed infinitely often. However, with a more complicated
protocol it may be that two successive messages (such as a connection request and
a data message) must get through the channel for successful delivery. Then a more
complicated strong fairness assumption is needed.
For this reason, sometimes a simple but somewhat over-optimistic global fair-
ness assumption is made: if a choice situation is encountered infinitely often, then
each of the choices is taken infinitely often. By “global” it is meant that the model
checker makes it automatically, so the user need not model it. In terms of (finite)
state spaces this means that unreachability of the desired action is considered an
error, but the existence of a cycle that does not contain the desired action is not
considered an error as such. In the simple model checker, this is represented via
“may-type” progress states. The checker declares an error when a state is reached
from which no may-type progress state can be reached.

Notes and Assignments for MAT-74506 AV 2016-11-16 18
Another possibly over-optimistic alternative is to assume that only a finite num-
ber of error actions may take place. This is modelled by having an extra boolean
variable that is initially false and may become true at any instant. Error transitions
may be executed only when it is false, and all states where it is false are classified
as progress states. That is, progress is required only after error transitions have
become disabled.
9 Experiments with the Simple Model Checker
A good model consists of components that are similar to the components of the
modelled system, perhaps together with one or more components that model the
users or customers of the system. As a general rule, components must interact only
like in the real system. However, sometimes this rule cannot be followed strictly
— for instance, see “slow transitions” below.
The models of components should be as natural as possible. This holds in
particular for the components that represent physical entities, such as the cage of a
lift. We cannot trust that the control software runs a real lift correctly, if the model
of the lift cage was unrealistic.
Unprevented request means that the act of requesting service cannot be pre-
vented by anything except the customer itself. For instance, it cannot be prevented
by other customers. This holds automatically, if the request is represented by a
transition that tests only the local state of the customer. If unprevented request
does not hold, then an incorrect system may accidentally pass model checking by
preventing the customers from requesting service. In that case, incorrect service is
not detected, because there is no service, because there are no requests for service.
An opposite kind of a problem is that a system only gives service to a customer
if some other customer requests service, but this is not detected due to inappropriate
modelling of customers. An example is a professor who does not read a thesis
unless there is at least one other thesis waiting to be read. If an infinite number of
theses is given to the professor, then the service looks correct. However, if only
a finite number of theses is given, then the last one is never read. For this reason,
models must have the unforced request property: the customers need not make
requests if they do not want to. This can be modelled by making it possible for the
customers to enter a terminal state where they do nothing.
When stating correctness criteria for systems with many identical customers, it
is often both sufficient and handy to state them for one customer only. (In the case
of the simple model checker, the correctness criteria are stated via the check and
progress functions.) By symmetry, if correctness holds for the specific customer,
it holds for every customer. However, the load that other customers cause to the
system must be modelled. For instance, a model of a lift is too simple, if only one
customer presses buttons. However, it suffices to check that one specific customer
is served correctly. Of course, appealing to symmetry is correct only if the model
indeed is symmetric.
Notes and Assignments for MAT-74506 AV 2016-11-16 19
When modelling embedded systems, it is often necessary to assume, for in-
stance, that software is so fast that it detects the arrival of a train to a sensor before
the train leaves the sensor. For this purpose, one may use a transition that moves
the train forward only if the software is not currently waiting for the signal from
the sensor. We call them slow transitions.
Here are some phrases used in connection with mutual exclusion algorithms. A
critical section is a specific state or set of states inside the code of each customer.
Mutual exclusion means that no two customers are ever simultaneously in their
critical sections. Eventual access means that if a customer has requested access to
its critical section, then it will eventually get there.
In the following exercices, design and check models for the described systems.
Justify your choice of the checking and progress functions. If you use slow tran-
sitions, justify them. In addition to the final model, also how you developed it is
interesting. So if you first wrote an incorrect model, the model checker reported an
error, and you understood the error by analysing the error history, please tell it.
46. Modify the alternating bit protocol model such that if the sender does not
receive an acknowledgement, it tells the customer about failure and becomes
ready for a new transmission.
47. Generalize Peterson’s mutual exclusion algorithm to four customers. Either
follow Peterson’s original publication “Myths about the Mutual Exclusion
Problem”, model a tree-like solution where the customers first compete in
pairs and then the winners compete against each other, or invent a solution
of your own.
48. Modify the lift model such that on the floors there are separate buttons for
going up and going down (except, of course, the top and bottom floors).
49. Design a token recovery mechanism for a token-ring system. The system
consists of n processes in a cycle. That is, process i receives messages only
from process (i−1)modn and sends messages only to process (i+1)modn.
Any message may be lost, the sending process does not notice that it was
lost, and the receiving process does not notice that it was ever sent. The
processes circulate a message called token. Processes 1, 2, . . . , n− 1 are
identical. Process 0 is a master whose task is to detect the loss of the token
and re-generate the token. To perform its task, it may send additional types
of messages to the ring. There must never be more than one token in the
system.
50. Model a childrens’ game where each player is originally a mouse. The tran-
sitions of the game consist of any two players of the same kind meeting.
When two mouses meet, one of them remains a mouse and the other be-
comes a dog. When two dogs meet, one of them becomes a mouse and the
other becomes a monkey. When two monkeys meet, one of them becomes a

Notes and Assignments for MAT-74506 AV 2016-11-16 20
mouse and the other becomes a human. Humans do not participate meetings.
Based on model checking results with different numbers of players, state a
hypothesis on the possible end situations of the game. Can you confirm the
hypothesis by reasoning?
51. Model an airline reservation system that consists of an airline company and
at least two travel agencies. The travel agencies may reserve flights from the
airline company one at a time. They may also cancel reservations. Between
any two reservations and/or cancellations, the other travel agencies may per-
form reservations and/or cancellations. A customer of a travel agency wants
a sequence of flights such that if it is not possible to get all flights in the se-
quence, then the customer takes no flights at all. This implies that the travel
agency must try to reserve the flights of the sequence one at a time, and if it
cannot get them all, then it must cancel those that it did get.
To the extent that you can, ensure that as many customers as possible get
their flights. To obtain that goal, it may help to add a third value to the
airline database: “confirmed”, meaning that the travel agency succeeded in
getting all the flights that the customer wanted, and thus will not cancel the
flight.
10 Linear Temporal Logic
A linear temporal logic (abbreviated LTL) formula is of any of the following forms,
where π is a state proposition (see Section 7), and ϕ and ψ are linear temporal logic
formulae:
π (ϕ) ϕ∧ψ ϕ∨ψ ¬ϕ ϕ → ψ ϕ ↔ ψ ©ϕ ✷ϕ ✸ϕ ϕ U ψ
An LTL formula holds or does not hold on an infinite sequence of states. It may
help to think about a sequence of days, starting today. With that interpretation,
• ©ϕ is read as “next ϕ”. It holds today if and only if ϕ holds tomorrow.
• ✷ϕ is read as “always ϕ”. It holds today if and only if ϕ holds today, tomor-
row, the day after tomorrow, and so on.
• ✸ϕ is read as “eventually ϕ”. It holds today if and only if ϕ holds today or
some day in the future.
• ϕ U ψ is read as “ϕ until ψ”. It holds today if and only if ψ holds today
or some day in the future, and every day between today and that day, today
included but that day excluded, ϕ holds every day.
The parentheses ( and ) have the same purpose as in many places in mathematics:
they specify how a formula is constructed from subformulae. The operators ∧, ∨,
¬, →, and ↔ are the familiar logical operators “and”, “or”, “not”, “implies”, and

Notes and Assignments for MAT-74506 AV 2016-11-16 21
“is logically equivalent to”. If it is claimed that an LTL formula holds without
mentioning the day, then the intention is that it holds today.
That an LTL formula ϕ holds on an infinite sequence s0s1 · · · of states is written
as s0s1 · · · |= ϕ and formally defined as follows:
• s0s1 · · · |= π holds if and only if s0 |= π holds, that is, π holds on the first state
of the sequence. (Because π is a state proposition, whether or not it holds on
the first state only depends on the first state.)
• s0s1 · · · |= (ϕ) holds if and only if s0s1 · · · |= ϕ holds. (The parentheses have
no semantic effect.)
• s0s1 · · · |= ϕ∧ψ holds if and only if both s0s1 · · · |= ϕ and s0s1 · · · |= ψ hold.
• s0s1 · · · |= ϕ∨ψ holds if and only if either s0s1 · · · |= ϕ, s0s1 · · · |= ψ, or both
hold.
• s0s1 · · · |= ¬ϕ holds if and only if s0s1 · · · |= ϕ does not hold.
• s0s1 · · · |=ϕ→ψ holds if and only if s0s1 · · · |=ϕ does not hold or s0s1 · · · |=ψ
holds.
• s0s1 · · · |= ϕ ↔ ψ holds if and only if either none or both of s0s1 · · · |= ϕ and
s0s1 · · · |= ψ hold.
• s0s1 · · · |=©ϕ holds if and only if s1s2 · · · |= ϕ holds, that is, ϕ holds on the
sequence that is obtained from the original by removing the first state.
• s0s1 · · · |=✷ϕ holds if and only if for every i ≥ 0 we have sisi+1 · · · |= ϕ.
• s0s1 · · · |=✸ϕ holds if and only if for some i ≥ 0 we have sisi+1 · · · |= ϕ.
• s0s1 · · · |= ϕ U ψ holds if and only if there is i such that ψ |= sisi+1 · · ·, and
for 0 ≤ j < i we have ϕ |= s js j+1 · · ·.
An LTL formula holds on a system if and only if it holds on every complete
execution of the system. A complete execution starts at the initial state and ei-
ther ends in a deadlock or never ends. For each complete execution, the formula
is checked against the infinite sequence of states that the states of the execution
constitute. In the case of a deadlocking execution, its last state is repeated for-
ever to get an infinite sequence of states. That is, if the sequence of states of the
execution is s0s1 · · · sn and sn is a deadlock, then the formula is checked against
s0s1 · · · sn−1snsnsn · · ·.If an LTL formula does not hold on a system, then the system has a complete
execution that violates the formula (and vice versa). This execution can be given as
a counterexample. It is analogous to a test run where the system failed. Checking
whether the formula holds on the system is equivalent to checking whether the
system has an execution that satisfies the negation of the formula.
Some operators can be expressed in terms of the others:

Notes and Assignments for MAT-74506 AV 2016-11-16 22
ϕ∨ψ ⇔ ¬(¬ϕ∧¬ψ) ✸ϕ ⇔ True U ϕ
ϕ → ψ ⇔ ¬ϕ∨ψ ✷ϕ ⇔ ¬✸¬ϕ
ϕ ↔ ψ ⇔ (ϕ → ψ)∧ (ψ → ϕ)
Intuitively also the following hold:
✸ϕ ⇔ ϕ∨©ϕ∨©©ϕ∨ ·· · and ✷ϕ ⇔ ϕ∧©ϕ∧©©ϕ∧ ·· · .
However, the formulae on the right hand sides are infinite. Therefore, they cannot
be processed by computers.
An LTL formula is stuttering-insensitive if and only if its validity does not
depend on the number of times that a state repeats in a row, as long as the number
is finite. In practice it means that it does not matter whether a banking system made
one, five, or one hundred transitions before giving money. Let r denote “request”
and s denote “service”. The formula
✷(r→✸s)
specifies that every request that is made today or later is eventually served. (The
service must come at the same time as or later than the request. Requests and ser-
vices are not counted. That is, one service suffices to satisfy all earlier requests and
even a simultaneous request.) The formula is stuttering-insensitive. An example of
a stuttering-sensitive formula is ✷(r →©©©s). It says that each request must
be served precisely three states later.
Typically we want specifications be stuttering-insensitive. A formula is cer-
tainly stuttering-insensitive, if it does not contain the operator ©. Therefore, we
typically do not use © in specifications.
However, © is important for explaining algorithms for checking whether a
system satisfies a formula. They often exploit the following fact, or its analogue to
✷ and ✸ (the analogues can be derived from formulae given above and ¬©ϕ ⇔©¬ϕ):
ϕ U ψ ⇔ ψ∨ϕ∧©(ϕ U ψ)
To understand its significance, consider the problem of deciding whether ϕ U ψ
holds on some state of some infinite path through a finite state space. Any infinite
path through a finite state space eventually starts to go around one or more cycles.
To simplify the discussion, we assume that the path consists of a (possibly empty)
initial part and one cycle. Let s0s1 · · · denote the corresponding sequence of states.
Assume that for every si, it is already known whether sisi+1 · · · |= ϕ and sisi+1 · · · |=ψ.
If ψ holds on the current state, then also ϕ U ψ holds on the current state. If
neither ϕ nor ψ holds on the current state, then also ϕ U ψ does not hold on the
current state. Otherwise the result depends on whether ϕ U ψ holds on the next
state of the sequence. So the algorithm goes there. If the algorithm repeatedly goes
to the next state without finding the answer, it eventually goes around the cycle. At
that point it is certain that ψ does not hold in the rest of the infinite path. So ✸ψ
and thus ϕ U ψ do not hold.

Notes and Assignments for MAT-74506 AV 2016-11-16 23
52. Which of the following hold? Justify your answers.
(a) ©©ϕ ⇔ ©ϕ (f) ✷(ϕ∨ψ) ⇔ (✷ϕ)∨✷ψ
(b) ✷✷ϕ ⇔ ✷ϕ (g) ✷(ϕ∧ψ) ⇔ (✷ϕ)∧✷ψ
(c) ✸✸ϕ ⇔ ✸ϕ (h) ✸✷✸ϕ ⇔ ✷✸ϕ
(d) ©✷ϕ ⇔ ✷©ϕ (i) ✷✸✷ϕ ⇔ ✸✷ϕ
(e) ©✸ϕ ⇔ ✸©ϕ (j) ¬(ϕ U ψ) ⇔ (✷¬ψ)∨ (¬ψ U¬ϕ)
53. Let ϕ1 and ϕ2 be any two formulae from the following list. Give all implica-
tions of the form ϕ1 ⇒ ϕ2 that hold.
ϕ ©ϕ ✷ϕ ✸ϕ ©✷ϕ ©✸ϕ ✷✸ϕ ✸✷ϕ
54. Using the laws in this document, the laws of propositional logic, and other
laws that you can justify, prove the following:
(a) ¬✷(r→✸s) ⇔ ✸(r∧✷¬s)
(b) ¬((✷✸r)→✷✸s) ⇔ (✷✸r)∧✸✷¬s
55. Is ϕ U (ψ U ζ) equivalent to (ϕ U ψ)U ζ?
56. Let ϕ1(x)⇔ x, ϕ2(x)⇔✷x, ϕ3(x)⇔✸x, ϕ4(x)⇔✷✸x, and ϕ5(x)⇔✸✷x.
Let a be a state proposition. Let 1 ≤ i ≤ j ≤ 5. Which of the formulae of the
form ϕi(a)∧ϕ j(¬a) can hold?
11 Fairness
Catching bad states and bad terminal states is unproblematic both for modellers
and model checking tools. However, they do not check liveness properties beyond
what can be reasoned from terminal states. With only them, it may happen that
if the verification model is so badly wrong that the customers do not issue any
requests in it, then it passes verification. Because there are no requests, there are
no incorrectly served requests.
May-type progress is in a many ways good solution to this problem. It is easy
for the modeller, because so-called fairness assumptions that are the topic of the
rest of this section are not needed. It is easy to implement in verification tools that
do not aim at maximum performance. It works together with stubborn sets that are
a method of reducing the number of states that must be constructed.
However, may-type progress also has negative aspects. The progress guarantee
that it gives is not always strong enough. For instance, when verifying Peterson’s
algorithm, it is important to catch must-type livelocks, because one goal of the al-
gorithm is to guarantee that there are none. If the state space is incompletely con-
structed, like with Holzmann’s bit state hashing, then false alarms may be given.

Notes and Assignments for MAT-74506 AV 2016-11-16 24
A counterexample consists of an execution that leads to a state from which no
progress state is reachable. It is not necessarily obvious what information to give
to the modeller, to help her/him find out why progress states are unreachable.
The classical approach with LTL consists of weak fairness and strong fairness.
It is perhaps easiest to understand them as means of ruling out counterexamples
that must not be classified as counterexamples. To discuss this, let us consider a
model consisting of two customers, two travel agencies and one airline company.
Customer 1 negotiates with travel agency 1 and customer 2 with travel agency 2.
During and based on the negotiation, the travel agency reserves flights from the
airline company.
Without any fairness assumptions, must-type verification reports that customer
1 may fail to get the flight, because the system may run around in a cycle where
customer 2 negotiates, travel agency 2 makes a reservation, customer 2 leaves, and
a new customer 2 comes and starts to negotiate. The negotiation between customer
1 and travel agency 1 does not make progress in this cycle, although there is no
rational reason for it to not make progress. It is like time is stopped for customer
1 and travel agency 1, but not for customer 2 and travel agency 2. Usually this is
grossly against what would happen in a real system. Therefore, it should not be
reported as a counterexample.
Weak fairness is defined to a set of sets of transitions. The simplest case is one
set consisting of one transition. Weak fairness to a transition t means that if in an
infinite execution, from some state onwards, t is enabled in every state but does not
occur in any, then the execution must not be reported as a counterexample, even if
it would otherwise seem to be one. Please notice that the state in question need not
be the first after which t is enabled in every state (the state in question included).
Instead, it may be the first or any state after that.
Another way of saying this is that if t is enabled in every state from some state
onwards, then t must eventually occur during or after that state. It follows from this
that t must occur infinitely many times, because otherwise after its last occurrence,
t would be enabled in every state from some state onwards but would not occur.
(✸✷ t is enabled) ⇒ ✷✸ t occurs
In terms of finite state spaces, violation of weak fairness is a cycle where t does not
participate although it is enabled in every state of the cycle.
Weak fairness to a set of transitions means that if, from some state onwards, in
every state some transition in the set is enabled (it may be a different transition in
different states), then some transition from the set must eventually occur. That is,
if for each state after some state, at least some transition in the set is enabled but
no transition in the set occurs, then the sequence must not be taken as a counterex-
ample.
(✸✷ ∃t ∈W : t is enabled) ⇒ ✷✸ ∃t ∈W : t occurs
Assume that t1 is enabled in odd-numbered states and disabled in the rest, and
t2 has it the other way round. In this case, weak fairness to {t1} and {t2} does

Notes and Assignments for MAT-74506 AV 2016-11-16 25
not require anything, because neither transition is enabled in every state from some
state onwards. However, in this example weak fairness to {t1, t2} does require that
t1 or t2 or both occur infinitely many times.
Weak fairness rules out the counterexamples where customer 1 does not get
service because (s)he and the airline company cannot negotiate because time is
stopped for them. Depending on how the airline company is modelled, there may
still be another counterexample where travel agency 1 tries to make a reservation,
but the airline company does not serve it, because travel agency 2 makes reserva-
tions again and again, and the airline company always chooses to serve it first. This
could be solved by implementing, for instance, Peterson’s algorithm to the com-
munication between the travel agencies and the airline company. However, one
does not usually want to represent such a low-level issue in a verification model
that is at a higher level of abstraction.
Instead, it is common to assume strong fairness. It is similar to weak fairness,
except that the obligation that a transition must be fired holds if the transition is
enabled in infinitely many states. That is, strong fairness towards t rules out an
infinite execution as a counterexample if t is enabled in infinitely many states but
does not occur infinitely many times. This is equivalent to the existence of a state
after which t does not occur, although it is infinitely many times enabled after that
state. (If t is enabled infinitely many times, then, for any state, t is enabled infinitely
many times after that state.) Strong fairness to a transition and a set of transitions
can be expressed by the following formulae:
(✷✸ t is enabled) ⇒ ✷✸ t occurs
(✷✸ ∃t ∈ S : t is enabled) ⇒ ✷✸ ∃t ∈ S : t occurs
In terms of finite state spaces, violation of strong fairness is a cycle where t
does not participate although it is enabled in some state of the cycle.
Strong fairness implies weak fairness but not necessarily vice versa.
With small verification models it is often the case that there are so few pro-
cesses that there are no other processes that can run around without the interesting
processes doing anything. Then weak fairness need not be assumed in practice.
The opposite case is that there are other processes that can run around without
the interesting processes doing anything. Let weak fairness be assumed to every
process. If there is a valid reason why the model does not provide service, then its
counterexample contains, in addition to activity (which may be absent) by the in-
teresting processes, a cycle by each of the other processes that may do something.
Otherwise it would be unfair to the other processes! This activity by the other pro-
cesses is irrelevant for the error, but makes the counterexample longer and harder
to read and understand. If the counterexample is because the interesting processes
ended up in a mutual deadlock, then the only activity that it contains is by the other
processes. Even if the interesting processes run around in an unproductive cycle,
the counterexample contains irrelevant activity.

Notes and Assignments for MAT-74506 AV 2016-11-16 26
Finally, consider a bank system where the cash dishpenser first sends the query
to the bank whether the personal identification number is correct, and in the positive
case then sends the query whether there is enough money in the bank account. The
protocol sender in the cash dispenser tries to send each message at most three times.
If no reply arrives to them, the cash dispenser tells the customer that the connection
is broken and gives the card back. If there are infinitely many customers and if the
connection may lose any message but is strongly fair to passing a message, then
infinitely many identification queries get through and replies to infinitely many
(although not necessarily all) of them get through. So the cash dispenser sends
infinitely many times the enough money query. However, strong fairness does not
prevent the loss of the next three messages. That is, strong fairness does not suffice
to guarantee that any enough money query gets through.
If the connection guarantees for each direction separately that infinitely often
two successive messages get through, and if there are no premature timeouts, then
infinitely many enough money queries get to the bank. However, there is still a
strongly fair cycle where no money is given to the customer. In it, first an identi-
fication query and its reply get through. Then all three enough money queries are
lost. Then another identification query, its reply, and the three money queries get
through, but the replies to the money queries are lost. The connection has passed
four successive messages from the cash dispenser to the bank. The replies that
were passed were successive in that direction. So the cycle is strongly fair.
In conclusion, sometimes formulating a sufficient natural credible strong fair-
ness assumption is difficult.
57. Show that if W is finite, then
(✸✷ ∃t ∈W : t is enabled) ⇒ ✷✸ ∃t ∈W : t occurs
is equivalent to
(✸✷ ∃t ∈W : t is enabled) ⇒ ∃t ∈W : ✷✸ t occurs
but not to
(∃t ∈W : ✸✷ t is enabled) ⇒ ∃t ∈W : ✷✸ t occurs .
58. The action names are r (request), s (service), l (lose message), d (deliver
message), and o (others). Write an LTL formula saying that assuming strong
fairness to delivery, all requests are eventually served.
59. Write an LTL formula saying that if t is enabled infinitely many times, then,
for any state, t is enabled infinitely many times after that state.
60. Show that strong fairness to {t1, t2} is not necessarily the same thing as strong
fairness to {t1} and to {t2}.

Notes and Assignments for MAT-74506 AV 2016-11-16 27
12 Buchi Automata
A Buchi automaton is of the form (Q,Σ,∆, q,F), where Q is the set of states, Σ
is the alphabet, ∆ is the set of transitions (∆ ⊆ Q×Σ×Q), q is the initial state
(q ∈ Q), and F is the set of accepting states (F ⊆ Q). It is assumed that Q and
Σ are finite (then also ∆ is finite). The structure is like that of a finite automaton,
but acceptance is defined differently. A Buchi automaton accepts or rejects infinite
sequences of elements of Σ. It accepts a0a1 · · · if and only if it can read a0a1 · · ·such that it visits some accepting state infinitely many times.
As was mentioned in Section 7, elementary information can be encoded as
visible labels of structural transitions. Then Σ is the set of visible labels together
with τ. Unlike in process algebras, in this context τ is treated similarly to the visi-
ble labels, instead of as an action that the Buchi automaton and the model can do
independently of each other. The other common option is to encode elementary
information as state propositions. Then Σ is typically not the set of state propo-
sitions, but the set of the sets of state propositions. This is necessary to make a
single transition check, for instance, that both g1 and g2 hold in the current state.
In practice, one can write propositional formulae along the transitions of a Buchi
automaton.
Each time when the system under model checking makes a move, also the
Buchi automaton makes a move. If the elementary information is in states, then the
first move of the Buchi automaton is determined by the initial state. If the model
enters a terminal state, then the Buchi automaton continues by making infinitely
many τ-moves or moves determined by the valid state propositions of the terminal
state. We say that a state of the combination of the model and the Buchi automaton
is accepting, if and only if in it, the Buchi automaton is in an accepting state.
If the state space of the combination is finite, then the Buchi automaton accepts
if and only if the state space contains a cycle that contains an accepting state. Such
a cycle obviously corresponds to a complete execution that the Buchi automaton
accepts. However, a complete execution that the Buchi automaton accepts need not
end with a cycle that is repeated forever. Instead, it may irregularly alternate be-
tween many cycles. However, even in that case the execution visits some accepting
state infinitely many times. By following the execution until it visits the accepting
state for the second time and then repeating forever the path from the first visit to
the second visit, an accepting cycle is obtained.
As was mentioned in Section 10, checking a model against an LTL formula es-
sentially means searching for a complete execution that violates the formula. Such
an execution satisfies the negation of the formula. Therefore, a Buchi automaton
is typically designed for the negation of the property that is being checked. For in-
stance, to check ✷(r→✸s) (every request is eventually served), a Buchi automaton
that expresses ¬✷(r→✸s) is designed. This formula is equivalent to ✸(r∧✷¬s).Counterexamples to ✸s can be caught with a deterministic Buchi automaton
that has only one state. It has one transition, and its label is ¬s.Counterexamples to ✷✸s require a nondeterministic Buchi automaton. To see
Notes and Assignments for MAT-74506 AV 2016-11-16 28
that, assume that there is a deterministic Buchi automaton for ✸✷¬s. Let σi denote
σ repeated i times, and σω denotes σ repeated infinitely many times. Let n be the
number of states of the automaton. It accepts (s(¬s)n)n(¬s)ω. Because there are
only n different states, there are 0 ≤ i < j ≤ n such that the automaton is in the
same state after (s(¬s)n)i and after (s(¬s)n) j. If the corresponding cycle contains
an accepting state, then the automaton accepts (s(¬s)n)i((s(¬s)n) j−i)ω, which is
incorrect. If the corresponding cycle does not contain an accepting state, then
the automaton incorrectly rejects (s(¬s)n)is(¬s)ω, because also (¬s)n makes the
automaton enter a cycle because of lack of more than n different states.
Nondeterminism implies duplication of states: the same state of the model
may combine with more than one states of the Buchi automaton, yielding more
than one states of the combination of the model and the Buchi automaton. Non-
progress cycles can detect violations of ✷✸s without duplication of states. In this
sense, Buchi automata are a less efficient way of detecting violations of ✷✸s than
non-progress cycles.
On the positive side, Buchi automata can be used to check more properties than
non-progress cycles. Indeed, any LTL formula can be translated to a Buchi au-
tomaton that accepts precisely those complete executions that violate the formula.
However, the translation may yield exponentially big Buchi automata. Indeed,
the complexity of model checking an LTL formula on a state space is PSPACE-
complete in the size of the formula, but the complexity of checking a state space
against a Buchi automaton is obviously polynomial in the size of the Buchi au-
tomaton. (Both are polynomial in the size of the state space, but the state space
may be exponential in the size of the model.)
On the other hand, a property may be encoded directly as a Buchi automaton,
without first representing it as an LTL formula. This may even be easier than
writing the LTL formula.
61. The action names are r (request), s (service), l (lose message), d (deliver
message), and o (others). Design a Buchi automaton that catches counterex-
amples of “assuming strong fairness to delivery, all requests are eventually
served”.
62. Design a Buchi automaton that catches counterexamples of “if the execution
is weakly fair to all labels, then every request (label r) is eventually served
(s)”. Other actions have the label o.
63. Which of the following can be represented as deterministic Buchi automata?
✷p ✸✷p (✷p)∨✷¬p (✸✷p)∨✸✷¬p
✸p ✷✸p (✸p)∧✸¬p (✷✸p)∧✷✸¬p
13 Isomorphism, Bisimulation, and Symmetries
Kripke structures. In temporal logics, information on what is going on is repre-
sented via propositions on states. They talk about the situation one state at a time

Notes and Assignments for MAT-74506 AV 2016-11-16 29
(we often call it the current state), and are either true or false. Examples: Client 3
is in local state 2, fifo Q is empty, the alternating bit value of the receiver is 1, the
light is on, and M(p3)> 2.
In this context, Kripke structures are used as state spaces. A Kripke structure
(S,Π,ν,∆, s) consists of five components:
S set of states;
Π set of state propositions;
ν evaluation function, which is a function S 7→ 2Π (that is, from S to 2Π) that,
for each state s, yields the set of atomic propositions that are true on s;
∆ set of transitions; we have ∆ ⊆ S× S; typically it is required that for each
s ∈ S there is s′ ∈ S such that (s,s′) ∈ ∆ (that is, deadlocks are replaced by
infinite repetition of the deadlock state); and
s initial state; we have s ∈ S.
It is often handy to use an evaluation function that inputs a state and an atomic
proposition, and outputs a truth value. Then ν(s,π) = true if and only if π ∈ ν(s).Sometimes, especially when discussing symmetries, a set of initial states S
is used instead of a single initial state s. Obviously S ⊆ S. It is reasonable to
require S 6= /0, because otherwise there is no behaviour to investigate. Formally, a
Kripke structure with S = /0 is a funny object, because it satisfies every linear time
specification on Π: none of its executions is a counterexample to any linear time
specification, because it has no executions.
The word “transition” is used above differently from Petri nets. A Petri net
transition is something that may cause one step of activity, whereas a member of
∆ is the activity itself. An atomic statement in program code is analogous to Petri
net transitions. To distinguish the two meanings, we call entities that cause activity
structural transitions, and the activity itself semantic transitions. So a semantic
transition corresponds to an occurrence of a Petri net transition, or to an execution
of an atomic statement of a program. A semantic transition is an edge in the state
space.
Stuttering-insensitivity. Most of the time we are interested only in stuttering-
insensitive properties. A property is stuttering-insensitive if and only if collapsing
every as long as possible finite sequence of observationally identical states to a
single state never changes the truth value of the property. Observationally identical
means that each state proposition yields the same truth value in both states, but the
states may differ in aspects that are not represented via the propositions.
After the collapsing, there are two kinds of executions. Either each state differs
from the next via at least one state proposition, or the execution has a prefix with
this property followed by an infinite sequence of observationally identical states.

Notes and Assignments for MAT-74506 AV 2016-11-16 30
Stuttering-sensitive formulae can be specified with the next state operator ©.
For instance, ©P is stuttering-sensitive, because, showing the evolution of the
truth value of P, FF(T)ω fails it, but F(T)ω satisfies it. It has been proven that any
property specified by a linear temporal logic formula that does not contain © is
stuttering-insensitive.
Labelled transition systems. In process algrebras, information on what is going
on is represented via names of transitions, also known as actions. They talk about
what happens in one atomic operation. Examples: The client requests “withdraw
10 euros”, fifo Q loses the message, Client 1 enters its critical section, and the light
switches on. Often an action is invisible to the users of a system. For this purpose,
the greek letter τ has been reserved to denote invisible actions. All other action
names denote visible actions. An invisible action is different from a sequence of
zero actions, that is, τ 6= ε. The occurrence of τ is stuttering.
In process algebras, labelled transition systems are used as state spaces. A la-
belled transition system (abbreviated LTS) (S,Σ,∆, s) consists of four components:
S set of states;
Σ alphabet; we have τ /∈ Σ;
∆ set of transitions; we have ∆ ⊆ S× (Σ∪{τ})×S; and
s initial state; we have s ∈ S.
Here, too, a set of initial states S may be used instead of a single initial state.
Again, zero initial states yields an LTS that satisfies every linear time specification.
The transitions in ∆ are semantic transitions.
Isomorphism. Intuitively, isomorphic objects are the same object represented
using different names of the states.
Two Kripke structures K and K′ are isomorphic if and only if they have the
same state propositions and there is a bijection (that is, a 1-to-1 mapping) f be-
tween their sets of states such that it respects the initial states, truth values of atomic
propositions, and transitions. That is, for each state s, s1, and s2 of K, s′ = f (s),ν′( f (s)) = ν(s), and ( f (s1), f (s2)) ∈ ∆′ if and only if (s1,s2) ∈ ∆.
Two labelled transition systems L and L′ are isomorphic if and only if they have
the same alphabet and there is a bijection f between their sets of states such that it
respects the initial states and transitions. That is, for each state s, s1, and s2 of L,
s′ = f (s), and ( f (s1),a, f (s2)) ∈ ∆′ if and only if (s1,a,s2) ∈ ∆.
A set of initial states must satisfy f (s) ∈ S′ if and only if s ∈ S.
Assume that Kripke structure K has an execution with some sequence of truth
value combinations of atomic propositions. It arises from an execution s0s1s2 · · ·,where s0 = s and (si−1,si)∈∆ for every i∈Z
+. The sequence is ν(s0)ν(s1) · · ·. If f
is an isomorphism mapping K to K′, then s′ = f (s) = f (s0) and ( f (si−1), f (si))∈∆

Notes and Assignments for MAT-74506 AV 2016-11-16 31
for every i∈Z+. So K′ has the execution f (s0) f (s1) f (s2) · · ·. It yields the sequence
ν′( f (s0))ν′( f (s1))ν
′( f (s2)) · · ·= ν(s0)ν(s1)ν(s2) · · ·, that is, the original sequence.
In a similar fashion, it can be proven that any interesting property of an object
holds also on any isomorphic object, assuming that the component on which the
mapping applies has been chosen appropriately. Above, the mapping applies to
states. When discussing symmetries below, also another mapping is needed that
applies on state propositions. This difference is because, to the extent we can ob-
serve the behaviour, here we expect the objects to behave in the same way, whereas
there we expect them to behave in a symmetric way.
Here the mapping is applied to states but not to state propositions, because we
assume that we can observe state propositions but not other information on states.
We have an abstract view to the states. Even so, the abstraction does not allow
to map two distinct states to the same state, even if precisely the same atomic
propositions hold on them.
Checking whether two objects are isomorphic seems to be impossible in poly-
nomial time, but not NP-complete. In practice, this means that it is computationally
expensive.
Symmetry mappings. In the context of symmetry methods, because the initial
state is often not symmetric, it is common to use a set of initial states. For instance,
instead of assuming that the alternating bit is 0 in the sender and receiver of the
alternating bit protocol, it is assumed that either it is 0 in both or 1 in both.
Please notice that in the definition below, f is not necessarily 1-to-1. The
savings provided by the symmetry method arise from mapping many states to the
same state. The symmetry mapping maps each object to its representative. For
instance, the representative of a state with precisely one lamp on may be obtained
by rotating the system such that lamp 1 is on. On the other hand, g is 1-to-1,
because it acts on the observable aspect. For instance, a symmetric version of
“lamp 3 is on” is “lamp 1 is on”, not “any lamp is on”.
A symmetry mapping of a Kripke structure with a set of initial states is a pair
of functions f : S 7→ S and g : S ×Π 7→ Π such that for each state s, s1, and s2
and each π ∈ Π we have ν( f (s),g(s,π)) = ν(s,π); ( f (s1), f (s2)) ∈ ∆ if and only if
(s1,s2) ∈ ∆; and f (s) ∈ S if and only if s ∈ S.
A symmetry mapping of a labelled transition system with a set of initial states
is a pair of functions f : S 7→ S and g : S×Σ 7→ Σ such that ( f (s),g(s,a), f (s′)) ∈ ∆
if and only if (s,a,s′) ∈ ∆, and f (s) ∈ S if and only if s ∈ S.
The functions f and g are obtained either informally or from a description of
the symmetry at the level of a structural description of the system. For instance,
some places and transitions of a Petri net may have double indices pi, j and ti, j where
j ranges from 0 to n−1, and the system is symmetric with respect to mapping pi, j
to pi, j⊕1 and ti, j to ti, j⊕1, where j ⊕ k = ( j + k)mod n. Let us also assume that
ν(M,π j)⇔ M(p3, j)> 0. Then rotation of k positions corresponds to f (M)(pi, j) =M(pi, j⊕k) and g(M,π j) = π j⊖k. We have ν( f (M),g(M,π j)) ⇔ ν( f (M),π j⊖k) ⇔

Notes and Assignments for MAT-74506 AV 2016-11-16 32
f (M)(p3, j⊖k)> 0 ⇔ M(p3, j⊖k⊕k)> 0 ⇔ M(p3, j)> 0 ⇔ ν(M,π j).We usually also assume f ( f (s)) = f (s) for every state s, that is, the repre-
sentatives are mapped to themselves, because it is usually easy to obtain, and not
having it makes the reduction worse. However, this assumption is often not men-
tioned, because of being unnecessary for the proof of correctness of the symmetry
method.
The symmetry method works by mapping each state to its representative before
processing it further. It is the representative, not the state itself (unless it is its
own representative), that is stored in the state space. Therefore, where ordinary
state space generation starts at some initial state s, the symmetry method starts at
f (s); and where the ordinary method constructs a transition (s,a,s′), the symmetry
method constructs (s,a, f (s′)). (Here s = f (s), because s is the representative of a
state met earlier.)
This leads to symmetry hops in counterexamples: when everything is ready for
Client 2 to enter its critical section, in the next state it is Client 1 that is in its critical
section. This may be compensated for by keeping track of the currently valid f and
g when printing the counterexample. However, sometimes we do not want to do
that because of the reason illustrated with the following example. Assume that the
counterexample consists of a token going a full cycle in a ring without anything
useful happening. In the raw counterexample, the token moves from one station to
the next, but just when it would reach the next station, a symmetry hop returns it to
the previous station, and the counterexample is complete. In the processed coun-
terexample, the token literally moves around the ring, so a long counterexample is
obtained where symmetric versions of the same sequence of events occur as many
times as there are stations in the ring.
Bisimilarity. Bisimilarity resembles isomorphism, but the mapping is not a func-
tion but a relation, that is, many-to-many. Isomorphic objects are bisimilar but not
necessarily vice versa. That is, bisimularity abstracts away from strictly more in-
formation than isomorphism. In particular, it allows changing the number of states.
In concurrency theory, bisimilarity is widely considered the right notion to compare
objects at a detailed level. According to this view, stronger notions are useful only
in that they imply bisimilarity, and weaker notions are considered as abstractions.
Two Kripke structures K and K′ are bisimilar if and only if they have the same
state propositions and there is a relation “∼” between their sets of states such that it
respects the initial states, truth values of atomic propositions, and transitions. That
is, s ∼ s′, and for each state s1 and s2 of K and each state s′1 and s′2 of K′, if s1 ∼ s′1,
then
• ν(s1) = ν(s′1),
• if (s1,s2) ∈ ∆, then there is z′2 such that s2 ∼ z′2 and (s′1,z′2) ∈ ∆′, and
• if (s′1,s′2) ∈ ∆′, then there is z2 such that z2 ∼ s′2 and (s1,z2) ∈ ∆.

Notes and Assignments for MAT-74506 AV 2016-11-16 33
The relation “∼” is called bisimulation.
Two LTSs L and L′ are bisimilar if and only if they have the same alphabets and
there is a relation “∼” between their sets of states such that it respects the initial
states and transitions. That is, s ∼ s′, and for each state s1 and s2 of L and each
state s′1 and s′2 of L′, and each a ∈ Σ∪{τ}, if s1 ∼ s′1, then
• if (s1,a,s2) ∈ ∆, then there is z′2 such that s2 ∼ z′2 and (s′1,a,z′2) ∈ ∆′, and
• if (s′1,a,s′2) ∈ ∆′, then there is z2 such that z2 ∼ s′2 and (s1,a,z2) ∈ ∆.
There is a fast algorithm for testing whether two Kripke structures or LTSs are
bisimilar. Furthermore, for any Kripke structure or LTS, there is a unique (up to
isomorphism) smallest bisimilar Kripke structure or LTS, and it can be constructed
quickly.
64.
Draw a bisimulation
between the two la-
belled transition sys-
tems in the picture.
a a
b ca
b ba a b
a
b c a b bb a
65.
Which of the three labelled transition
systems are bisimilar with each other?
Justify briefly your answer.
Σ = {a}a
Σ = {a} Σ = {a}a
66.
Which of the three la-
belled transition systems
are bisimilar with each
other? Justify your an-
swer.
a c
a c c ac a
a
a a c cc
a ca
c c ac a
67. (a) Let L1 and L2 be isomorphic labelled transition systems. If L′1 and L′
2
are made by reversing the transitions in them, are L′1 and L′
2 necessarily
isomorphic with each other? Justify briefly, or give a counterexample.
(b) The same question as above, but using bisimilarity instead of isomor-
phism.
68. Assume that two values may be inputted, 1 and 2. Model each of the follow-
ing programs as an LTS such that each numbered line is modelled with one
transition. Model inputting of 1 with the action inp1, outputting of 2 with
out2, and so on. Are any two of the three LTSs isomorphic? Are any two
bisimilar?
A
1: input x; x := 0
2: output x
3: goto 1
B
1: input x
2: output x
3: goto 1
C
1: input x
2: output x; x := 0;
3: goto 1

Notes and Assignments for MAT-74506 AV 2016-11-16 34
69. Let Π = {p}. Draw two Kripke structures such that they are not bisimilar
but both of them satisfy precisely the same linear time specifications.
70. Let A be an array of size N where each array element may have the values 0,
1, . . . , k−1. Initially A[i] = 0 for 0 ≤ i < N, n = 0, and h = 0. Consider the
three models of fifo of capacity N shown below. Each has 2k actions: put x
is enabled when n < N, and it stores the value x in the fifo. get x is enabled
when n > 0, and it returns a value from the fifo. In these, x ∈ {0, . . . ,k−1}.
For each model, compute the number of reachable states. (If you cannot
solve the general case, try the special cases k = 1 and k = 2.) Are any two of
the three models isomorphic? Are any two bisimilar?
put x get x
(a) A[n] := x x := A[0]n := n+1 n := n−1
return for i := 0 to n−1 do A[i] := A[i+1] endfor
A[n] := 0
return x
(b) A[n] := x x := A[0]n := n+1 n := n−1
return for i := 0 to n−1 do A[i] := A[i+1] endfor
return x
(c) A[h] := x x := A[ (N +h−n)mod N ]n := n+1 n := n−1
h := (h+1)mod N return x
return
71. The state space of the system (b) in the previous exercise has 12 states. Draw
it. Then find the minimal equivalent state space using block splitting. You
may treat the system as a deterministic finite automaton whose every state is
final.
72.
Which of the three la-
belled transition systems
are bisimilar with each
other? Justify briefly your
answer.
a a a
b b bc
a a
b b bc
a a
b b b c
73. Minimize the LTSs in the previous exercise using block splitting.
74. Block splitting can also be applied to Kripke structures so that the result
satisfies precisely the same CTL* (and thus CTL and LTL) formulae as the
original.
(a) How should the initial blocks be chosen?
Notes and Assignments for MAT-74506 AV 2016-11-16 35
(b) Assuming that the blocks are represented using the partition data struc-
ture described in the reading material, give a good algorithm for com-
puting the initial blocks.
75. In bisimilarity, the existence of a single relation “∼” is required that facil-
itates simulation in both directions. We consider another notion where the
existence of two relations is required, one facilitating simulation in one di-
rection and the other facilitating simulation in the opposite direction. Is this
another notion the same thing as bisimilarity? Either sketch a proof that it is,
or give a counterexample demonstrating that it is not.
14 Algorithms for Checking Liveness Properties
It is known well that depth-first search can be used to detect cycles. When it starts,
all vertices are white. The search paints a vertex grey when it finds it, and black
when it backtracks from it. The graph contains a cycle if and only if the search
ever finds a grey vertex. This can be harnessed for finding non-progress cycles
by postponing the investigation of progress transitions until there are no uninves-
tigated ordinary transitions at any state in the Work of Figure 6, and investigating
the ordinary transitions in depth-first order.
In the case of non-progress cycles, a counterexample consists of a path from the
initial state to some state of the cycle together with the cycle. The above algorithm
suffers from the tendency of depth-first search to yield long counterexamples. If
there is enough time and memory, then both the states and the edges between them
can be stored as a graph, which can be analysed to yield shorter counterexamples.
Unfortunately, often it is challenging enough to just to visit the reachable states.
A strictly bigger set of properties can be encoded via Buchi acceptance. Some
states of the system are declared as accepting states. For instance, accepting states
may be those where a certain state proposition is True. The system violates the
property if and only if its state space contains an accepting cycle, that is, a cycle
with at least one accepting state. It has an accepting cycle if and only if its state
space contains a cyclic strong component with at least one accepting state.
The most famous algorithm for detecting accepting cycles was published by
Costas Courcoubetis, Moshe Y. Vardi, Pierre Wolper, and Mihalis Yannakakis in
1990. It is often called nested depth-first search. It consists of an outer and a set
of inner depth-first searches of the state space. Each time when the outer search
backtracks from an accepting state, an inner search is started (unless the state has
already been investigated by an inner search). An inner search does not re-enter
states that have been found during earlier inner searches. If an inner search finds its
start state anew, then an accepting cycle is detected and the algorithm terminates.
The correctness of nested depth-first search is not obvious. If it announces
an accepting cycle, then there trivially is one. It is more difficult to see why the
algorithm does not lose accepting cycles although its inner searches do not re-enter
states that have already been found during inner searches.

Notes and Assignments for MAT-74506 AV 2016-11-16 36
Depth-first search has the property that for any vertex v, when the search back-
tracks from v, either v is in a cycle or the search has investigated every vertex that
is reachable from v. In the case of nested depth-first search, only the latter applies
to earlier inner searches, because otherwise the algorithm would have already ter-
minated. So each strong component has been investigated either completely or not
at all by earlier inner searches.
Let s be an accepting state where an inner search is started. Let C be the strong
component that contains s. Let s′ be any accepting state that is reachable from s
but not in C. The earlier inner searches have found no state of C. Therefore, if C is
cyclic, then the algorithm finds a path from s to itself and announces an accepting
cycle. If C is acyclic, then the outer search had found s′, backtracked from it, and
started an inner search at it before starting the inner search at s. Thus no other
uninvestigated accepting state than s itself is reachable from s, and there are no
accepting cycles to be unnounced in the scope of the new inner search.
Nested depth-first search need not store the edges of the state space, because
it can generate them for both searches by firing structural transitions. It needs to
store many states twice, but that can be done by adding two bits to each state in
Found that tell whether the state has been found by the outer and by the inner
search. Its Work consists of two stacks. Because a stack is only processed at
the top, most of it can reside in slow disk memory without causing much harm
to the speed of the program. The virtual memory system of modern computers
automatically moves blocks of memory to disk and back to fast random access
memory as needed. Thus the nested depth-first search (and ordinary depth-first
search) can use most of the fast memory for Found. Nested depth-first search is
also compatible with Holzmann’s bit-state hashing that will be discussed later.
A drawback of the nested depth-first search is that it starts detecting errors
when it starts to backtrack. It tends to lead to rather late detection of errors and long
counterexamples. The algorithm by Geldenhuys and Valmari of 2004 is guaranteed
to find an accepting cycle as soon as the search has investigated every edge of it.
???
76. How does the simple model checker detect may-type and must-type non-
progress? Compare its advantages and disadvantages to the techniques de-
scribed above.
77. Give a talk on how Gerard Holzmann’s Spin tool detects non-progress cy-
cles. Compare its advantages and disadvantages to the techniques described
above.
78. Can breadth-first search use most of the fast memory for Found?
79. Show that for any vertex v, when depth-first search backtracks from v, either
v is in a cycle or the search has investigated every vertex that is reachable
from v (or both).

Notes and Assignments for MAT-74506 AV 2016-11-16 37
80. Show with an example that an inner search of nested depth-first search may
find a state that has not yet been found by the outer search. Can this be
prevented by fixing the order in which structural transitions are investigated
at each state?
Talk topics
Give a talk on one of the following topics. The talk must be extensive enough
so that the whole meeting time (105 min) is used for the talk and the resulting
discussions. You may assume that 15 min is used for discussions. Reserve a topic
and a date by sending an email to the teacher. If there are overlapping reservations,
the first that has arrived wins.
The possible days are the following days of November 2014: 4, 6, 11, 13, 14,
18, 20, 21.
Binary decision diagrams. OY 21
Bounded model checking. TM 20
CTL, CTL*, and CTL model checking algorithm. BD 11
Promela and Spin. YS 18
Top Related