







Languages
Pages
Legal

NIKOLAI P. OSMOLOVSKII
Optimality conditions for bang-bang controls(theory and examples)
Joint work with Helmut Maurer
CEA-EDF-INRIA School Optimal Control:Algorithms and Application
May 30 - June 1st 2007
INRIA Rocquencourt, France
1

Mathematical programming: optimality conditions
Consider problem in IRn:
J = f0(x) → min,
fi(x) ≤ 0, i = 1, . . . , k
gj(x) = 0, j = 1, . . . ,m,
where f0, fi, gj are C2-functions.
Lagrange function has the form
L(x, α, β) =k∑i=0
αifi(x) +m∑j=1
βjgj(x).
2

Set Λ0, critical cone, and quadratic form
At a feasible point x, define the set of normed tuples of Lagrange multipliers:
Λ0 =λ = (α, β) | α ≥ 0, αifi(x) = 0, i = 1, . . . , k, |α|+ |β| = 1, Lx(x, α, β) = 0
,
the critical cone
K = x | f ′0(x)x ≤ 0, f ′i(x)x ≤ 0, i ∈ I, g′j(x)x = 0, j = 1, . . . ,m,
where I = i ∈ 1, . . . , k | fi(x) = 0 is the set of active indices,
and the form:Ω(λ, x) = 〈L′′xx(x, α, β)x, x〉,
which is linear in λ and quadratic in x.
3

Second order no-gap conditions of a local minimum(Levitin, Milyutin, Osmolovskii, 1974)
Theorem 1 Let the point x be a local minimum in the problem. Then, at this point,
(a) the set Λ0 is nonempty and
(b) maxλ∈Λ0
Ω(λ, x) ≥ 0 ∀ x ∈ K.
Theorem 2 Let at the feasible point x
(a) the set Λ0 be nonempty and
(b) maxλ∈Λ0
Ω(λ, x) > 0 ∀ x ∈ K \ 0.
Then x is a local minimum in the problem.
4

Two types of second order optimality conditions for bang-bang control problems
Second order (necessary, sufficient) conditions for bang-controlsobtained by Osmolovskii
published in:Milyutin, A.A. and Osmolovskii, N.P. (1998)Calculus of Variations and Optimal Control,Translations of Mathematical Monographs, Vol. 180,American Mathematical Society, Providence
Second order sufficient conditions for bang-controlsobtained by Agrachev, Stefani, and Zezza
published in:Agrachev, A.A, Stefani, G. and Zezza, P.L. (2002)Strong optimality for a bang-bang trajectory,SIAM J. Control and Optimization, vol. 41, pp. 991-1014.
5

Linear in control problem on a nonfixed time interval
Minimize J (t0, t1, x(·), u(·)) = J(t0, x(t0), t1, x(t1))
under the constraintsF (t0, x(t0), t1, x(t1)) ≤ 0,
K(t0, x(t0), t1, x(t1)) = 0,
x = f(t, x, u), u ∈ U,
wheref(t, x, u) = a(t, x) +B(t, x)u,
U is a convex polyhedron,
J, F,K, and B are C2 − functions,
6

Remark: The integral functional J =∫ t1t0ϕ(t, x, u) dt has the endpoint form:
J = y(t1)− y(t0), where y = ϕ(t, x, u).
7

Fix ∆ := [t0, t1].
Abbreviations: x0 = x(t0), x1 = x(t1), p = (x0, x1).
Definition A trajectory T = (x(t), u(t) | t ∈ ∆) is admissible, if
x(·) is absolutely continuous,
u(·) is measurable bounded,
T satisfies all constraints.
8

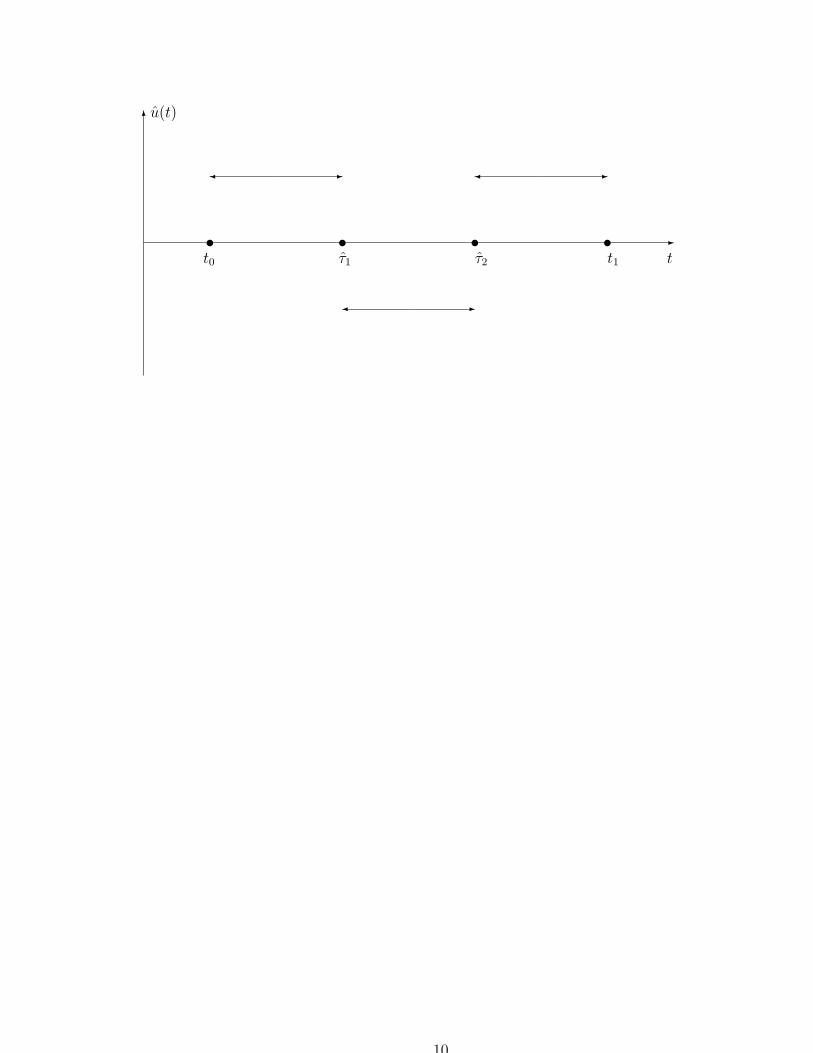
Bang-bang control
Fix an admissible trajectory T = (x(t), u(t) | t ∈ ∆) such that u(t) is a bang-bang control, i.e.,
(a) u(·) is piecewise constant, (b) u(t) ∈ ex U .
Denote byΘ = τ1, . . . , τs, t0 < τ1 < · · · < τs < t1
the set of discontinuity points of u(t).
Denote by[u]k = u(τk+)− u(τk−)
the jump of u(t) at τk ∈ Θ.
9
-
6
-
t-
t-
ttt0 τ1 τ2 t1 t
u(t)
10

Introduce
• the Pontryagin function (or the Hamiltonian)
H(t, x, u, ψ) = ψf(t, x, u) = ψa(t, x) + ψB(t, x)u,
• the switching functionσ(t, x, ψ) = ψB(t, x),
• the end-point Lagrange function
l(α0, α, β, p) = α0J(p) + αF (p) + βK(p),
• a quadruple of Lagrange multipliers
λ = (α0, α, β, ψ(·)).
11

Maximum principle
For T , denote by M0 the set of λ satisfying:
α0 ≥ 0, α ≥ 0, αF (p) = 0,
α0 +∑αi +
∑|βj| = 1,
ψ = −Hx,
ψ(t0) = lx0 , ψ(t1) = −lx1 ,
maxu∈U
H(t, x(t), u, ψ(t)) = H(t, x(t), u(t), ψ(t)),
wherep = (x(t0), x(t1)) lx0 = lx0(α0, α, β, p), Hx = Hx(t, x(t), u(t), ψ(t)).
12

Pontryagin minimum
Definition(Milyutin) T is a Pontryagin minimum if it is a minimum on the set
‖x(·)− x(·)‖∞ < ε, ‖u(·)− u(·)‖1 < ε with some ε > 0.
Theorem 3
• If T is a Pontryagin minimum, then M0 6= ∅.
• M0 is a finite-dimensional compact set
• the projector λ 7→ (α0, α, β) is injective on M0.
13

First type of second order conditions.
Necessary conditions. Quantity Dk(H)
Proposition 1 For each λ ∈M0 and for each τk ∈ Θ the derivative
Dk(H) :=d
dt
(σ(t, x(t), ψ(t))[u]k
) ∣∣t=τk
exists and, moreover,Dk(H) ≥ 0.
14

The space Z(Θ)
Denote by PΘC1(∆, IRn) the space of piecewise continuous functions
x(·) : ∆ → IRn,
continuously differentiable on each interval of the set ∆ \Θ.
Setz = (ξ, x) ,
where ξ ∈ IRs, x ∈ PΘC1(∆, IRn). Thus,
z ∈ Z(Θ) := IRs × PΘC1(∆, IRn).
For z, set p = (x(t0), x(t1)).
15

Critical cone
Denote by K the set of z ∈ Z(Θ) satisfying
〈J ′(p), p〉 ≤ 0, 〈F ′i (p), p〉 ≤ 0 ∀i ∈ IF (p),
K ′(p)p = 0,
˙x(t) = f ′x(t, x(t), u(t))x(t), [x]k = [ ˙x]kξk ∀k,
whereIF (p) = i ∈ 1, . . . , d(F ) | Fi(p) = 0,
[x]k = x(τk+)− x(τk−),
[ ˙x]k = ˙x(τk+)− ˙x(τk−)
are the jumps of x(t) and ˙x(t), resp., at the point τk ∈ Θ.
The cone K is finite-dimensional and finite-faced!
16

Quadratic form
For each λ ∈M0 and z ∈ K we set
Ω(λ, z) =s∑
k=1
(Dk(H)ξ2
k + 2[ψ]kxkavξk
)+ 〈lppp, p〉 −
t1∫t0
〈Hxxx(t), x(t)〉 dt,
where [ψ]k is the jump of ψ(t) at τk ∈ Θ,
xkav =1
2(x(τk−) + x(τk+)),
lpp = lpp(p, α0, α, β), Hxx = Hxx(t, x(t), u(t), ψ(t)).
17

Quadratic necessary optimality condition
Theorem 4 (Osmolovskii, 1988) If T is a Pontryagin minimum,then the following condition A hold:
(a) the set M0 is nonempty
(b) maxλ∈M0
Ω(λ, z) ≥ 0 for all z ∈ K.
18

Essential component of the state
Definition The component xi of the state vector x is called unessential if
(a) f does not depend on xi and
(b) F, J,K are affine in xi(t0) and xi(t1).
Example: Let
J =
∫ t1
t0
ϕ(t, x, u) dt J = y(t1)− y(t0), y = ϕ(t, x, u).
Then y is unessential component.
ess (x) denote the vector of all essential components of the vector x.
19

Strong minimum
Definition T is a strong minimum , if it is a minimum on the set
|x(t0)− x(t0)| < ε, ‖ess(x(·)− x(·)
)‖∞ < ε with some ε > 0.
20
Strict bang-bang control
LetArg max
v∈Uσv
be the set v ∈ U where the maximum of σv is attained.
Definition u(t) is a strict bang-bang control if there exists λ ∈M0 such that
Arg maxv∈U
σ(t, x(t), ψ(t))v = [u(t−), u(t+)].
If dim(u) = 1, then the strict bang-bang property is equivalent to
σ(t, x(t), ψ(t)) 6= 0 ∀t ∈ ∆ \Θ.
21

Quadratic sufficient optimality condition
Theorem 5 (Osmolovskii, 1998) For T , let the following Condition B be fulfilled
(a) the set M0 is nonempty and u(t) is a strict bang-bang control;
(b) there exists λ ∈M0 such that Dk(H) > 0, ∀k;
(c) maxλ∈M0
Ω(λ, z) > 0 for all z ∈ K \ 0.
Then T is a strict strong minimum.
There is no gap between the necessary condition A and the sufficient condition B!
22

Second type of second order conditions.
Function u(t; τ)
For any i = 1, . . . , s, denote by ui the vertex of the polyhedron U such that
u(t) = ui for t ∈ (τi−1, τi)
where τ0 = t0, τs+1 = t1.
Take a vector τ = (τ1, . . . , τs) ∈ IRs close to the vector τ = (τ1, . . . , τs).
Define the function u(t; τ) by the condition
u(t; τ) = ui for t ∈ (τi−1, τi) ∀i,
where τ0 = t0, τs+1 = t1.
Obviously, u(t; τ) = u(t), t ∈ ∆ \Θ.
23

-
6
-
t t-
t-
ttτ1
tt0 =: τ0 τ1 τ2 τ2 τ3 := t1 t
u(t; τ1, τ2)
u1 u3
u2
24

Function x(t;x0, τ)
Take a vector x0 close to the vector x0 := x(t0).
Let x(t;x0, τ) be the solution to the ”basic initial value problem”
x = f(t, x, u(t; τ)), x(t0) = x0.
Obviously, x(t; x0, τ) = x(t) ∀t ∈ ∆.
Denote ζ := (x0, τ) ∈ IRn × IRs.
25

Operator g(ζ)
Take a small neighborhood V of ζ, and let ζ = (x0, τ) ∈ V .
Putg(ζ) = x(t1), where x(t) = x(t;x0, τ).
Thus, formally,g(ζ) = x(t1;x0, τ).
If V is sufficiently small, then g : V → IRn is well defined and C2-smooth.
26

Induced optimization problem
Consider C2-smooth problem in the space IRn × IRs of the variables ζ = (x0, τ):
F0(ζ) := J(x0, x(t1;x0, τ)) → min,
Fi(ζ) := Fi(x0, x(t1;x0, τ)) ≤ 0, i = 1, . . . , k
Gj(ζ) := Kj(x0, x(t1;x0, τ)) = 0, j = 1, . . . ,m,
We call this problem the induced optimization problem.
Lemma 1 If T is a Pontryagin local minimum in the bang-bang control problem,then ζ is a local minimum in the induced problem,and hence it satisfies the first and second order necessary conditions.
27

Set Λ0 in the induced problem
At the point ζ, define the set of normed tuples
µ = (α0, α, β) = (α0, α1, . . . , αk, β1, . . . , βm)
of Lagrange multipliers
Λ0 =µ ∈ IR1+k+m | αi ≥ 0, i = 0, . . . , k; αiFi(ζ) = 0, i = 1, . . . , k;
k∑i=0
αi +m∑j=1
|βj| = 1; L′ζ(µ, ζ) = 0,
where
L(µ, ζ) =k∑i=0
αiFi(ζ) +m∑j=1
βjGj(ζ).
28

Second order necessary conditions of a local minimum in the induced problem
At the point ζ, define the critical cone
K0 = ζ | F ′0(ζ)ζ ≤ 0, F ′
i(ζ)ζ ≤ 0, i ∈ I, G ′j(ζ)ζ = 0 ∀j,
where I = i ∈ 1, . . . , k | Fi(ζ) = 0.
Theorem 6 If ζ is a local minimum in the induced problem, then
(a) the set Λ0 is nonempty and
(b) maxµ∈Λ0
〈L′′ζζ(µ, ζ)ζ , ζ〉 ≥ 0 ∀ ζ ∈ K0.
29

Second order sufficient conditions of a local minimum in the induced problem
Theorem 7 If
(a) the set Λ0 be nonempty and
(b) maxµ∈Λ0
〈L′′ζζ(µ, ζ)ζ , ζ〉 > 0 ∀ ζ ∈ K0 \ 0,
then ζ is a local minimum in the induced problem.
30

A relationship between Lagrange multipliers in the basic and induced problems
Denote by Λ the set of λ = (α0, α, β, ψ, ψ0) such that
α0 ≥ 0, α ≥ 0, α0 + |α|+ |β| = 1, αF (p) = 0,
−ψ(t) = ψ(t)fx(t, x(t), u(t)),
ψ(t0) = lx0(µ, p), ψ(t1) = −lx1(µ, p), .
Proposition 2 The projector
π0 : (α0, α, β, ψ) → (α0, α, β)
maps 1:1 the set Λ onto the set Λ0.
Obviously, M0 ⊂ Λ (and possibly M0 6= Λ). Put
π0(M0) = ΛMP0 .
31
We say thatµ = (α0, α, β) and λ = (α0, α, β, ψ)
correspond to each other ifπ0λ = µ.
32

A relationship between critical cones in the basic and induced problems
Proposition 3 The operator
π1 : z = (ξ, x) → ζ = (x0, τ)
such thatτ = −ξ, x0 = x(t0)
is a one-to-one mapping of the critical cone K (for the trajectory T in the basic problem)onto the critical cone K0 (at the point ζ in the induced problem).
We say thatζ = (x0, τ) ∈ K0 and z = (ξ, x) ∈ K
correspond to each other ifτ = −ξ, x0 = x(t0).
33

A relationship between quadratic forms in the basic and induced problems
Theorem 8 Letµ = (α0, α, β) ∈ Λ0 and λ = (α0, α, β, ψ) ∈ Λ
correspond to each other, i.e. π0λ = µ, and let
ζ = (x0, τ) ∈ K0 and z = (ξ, x) ∈ K
correspond to each other, i.e. π1z = ζ.
Then the quadratic forms in the basic and induced problems take equal values:
〈L′′ζζ(µ, ζ)ζ , ζ〉 = Ω(λ, z).
34
Corollary 1maxµ∈ΛMP
0
〈L′′ζζ(µ, ζ)ζ , ζ〉 = maxλ∈M0
Ω(λ, z)
for ζ ∈ K0 and z ∈ K such that π1z = ζ.
35

Second-order necessary optimality conditions in the basic bang-bang controlproblem in terms of the induced problem
Theorem 9 (Osmolovskii and Maurer, 2005) If T is a Pontryagin minimumin the basic problem, then the following condition A′ holds:
(a) M0 is nonempty
(b) maxµ∈ΛMP
0
〈L′′ζζ(µ, ζ)ζ , ζ〉 ≥ 0 for all ζ ∈ K0.
Condition A′ is equivalent to condition A.
36

Second-order sufficient optimality condition in the basic bang-bang controlproblem in terms of the induced problem
Theorem 10 (Osmolovskii and Maurer, 2005) Let the following condition B′be fulfilled for T :
(a) the set M0 is nonempty
(b) u(t) is the nonsingular bang-bang control,
(c) ∃ λ ∈M0 such that Dk(H) > 0 ∀τk ∈ Θ,
(d) maxµ∈ΛMP
0
〈L′′ζζ(µ, ζ)ζ , ζ〉 > 0 for all ζ ∈ K0 \ 0.
Then T is a strict strong minimum in the basic problem.
Condition B′ is equivalent to condition B (B′ generalizes the result of Agrachev, Stefani,and Zezza).
37

Time-optimal bang–bang control problems
Minimize T
subject tox = f(t, x, u) = a(t, x) +B(t, x)u, u(t) ∈ U,
x(0) = a0, x(T ) = a1.
U ⊂ IRd(u) is a convex polyhedron, a and B are C2-functions, ∆ = [0, T ].
38

Pontryagin, strong, and almost global minimum
Definition (Milyutin). We say that the admissible trajectory T is aPontryagin minimum if there is no sequence of admissible trajectories
T n = (xn(t), un(t)) | t ∈ [0, T n] , n = 1, 2, . . .
such that
(a) T n → T for n→∞ and T n < T for n = 1, 2, . . . ,
(b) max∆n
|xn(t)− x(t)| → 0 for n→∞, where ∆n = [0, T n].
(c)∫
∆n
|un(t)− u(t)| dt→ 0 for n→∞.
Deleting (c) we obtain the definition of a strong local minimum.
Deleting (c) and (b) we obtain the definition of an almost global minimum (Milyutin).
39

Fix an admissible trajectory T = (x(t), u(t) | t ∈ ∆) such that the control u(·) ispiecewise constant on the interval ∆.
Denote byΘ = τ1, . . . , τs, t0 < τ1 < · · · < τs < t1
the set of all discontinuity points of the control u(t).
Denote by[u]k = u(τk+)− u(τk−)
the jump of the control u(t) at the point τk ∈ Θ.
Introduce the Hamiltonian
H(t, x, u, ψ) = ψf(t, x, u) = ψa(t, x) + ψB(t, x)u,
and the switching functionσ(t, x, ψ) = ψB(t, x).
40

Pontryagin maximum principle
Denote by M0 the set of pairs of functions (ψ0(·), ψ(·)) satisfying the conditions
ψ0(T ) ≤ 0, |ψ(0)| = 1,
ψ(t) = −Hx(t, x(t), u(t), ψ(t)),
ψ0(t) = −Ht(t, x(t), u(t), ψ(t)),
maxu∈U
H(t, x(t), u, ψ(t)) = H(t, x(t), u(t), ψ(t)),
H(t, x(t), u(t), ψ(t)) + ψ0(t) = 0.
Assume that M0 6= ∅.
41

Nondegenerate case. Strict bang-bang property
Assume that ∃ (ψ0, ψ) ∈M0 such that α0 := −ψ0(T ) > 0.
We call this case nondegenerate or normal.
We say that u(t) is a strict bang-bang control if there exists (ψ0, ψ) ∈M0 such that
Arg maxu′∈U σ(t, x(t), ψ(t))u′ = [u(t−), u(t+)] ∀t ∈ [t0, t1].
42
Critical subspace and quadratic form
Denote by K the set of z = (ξ, x) ∈ Z(Θ) = IRs × PΘC1(∆, IRn) such that
˙x = fxx, [x]k = [x]kξk, k = 1, . . . , s, x(0) = x(T ) = 0 ,
where fx = fx(t, x(t), u(t)).
The subspace K is finite–dimensional.
Define a quadratic form on the subspace K:
Ω(ψ, z) =s∑
k=1
(Dk(H)ξ2k + 2[Hx]
kxkavξk) +
T∫0
〈Hxxx, x〉 dt,
where the second derivative Hxx of the Hamiltonian is calculated along the trajectory(t, x(t), u(t), ψ(t)).
43

Second order optimality conditions (Osmolovskii)
Theorem 11 Let a trajectory T afford a Pontryagin minimum. Then Condition A holds:the set M0 is nonempty and
max(ψ0,ψ)∈M0
Ω(ψ0, ψ, z) ≥ 0 ∀ z ∈ K \ 0.
Theorem 12 For the trajectory T , let the following Condition B be fulfilled :
(a) u(t) is a strict bang-bang control;
(b) there exists (ψ0, ψ) ∈M0 such that Dk(H) > 0 for k = 1, . . . , s;
(c) max(ψ0,ψ)∈M0
Ω(ψ0, ψ, z) > 0 ∀ z ∈ K \ 0.
Then T is a strict strong minimum.
44

Time-optimal control problems for linear systems with constant entries
Consider the problem:
T → min, x(0) = a, x(T ) = b, x = Ax+Bu, u ∈ U,
where A and B are constant matrices and U is a convex polyhedron.
Proposition 4 Suppose there exists u∗ ∈ U such that
Aa+Bu∗ = 0 or Ab+Bu∗ = 0 (for example, b = 0, 0 ∈ U).
Then the almost global minimum is equivalent to the global one.
45

First order conditions
Let (T, x, u) be an admissible triple, and let ∃ ψ(t) : [0, T ] → Rd(x) such that
−ψ = ψA, u(t) ∈ Arg maxu′∈U(ψ(t)Bu′), ψx = const ≥ 0, |ψ(0)| = 1.
Denote the set of such functions by M0.
Theorem 13 (Milyutin) Suppose there exists ψ ∈M0 such that α0 := ψx > 0 (normal case).Then (T, x, u) affords an almost global minimum.
46

Bang-bang control, set Ξ, and function Q0
Assume that u(t) is a piecewise constant function taking values in the vertices of U .
Denote by Θ = t1, . . . , ts the set of discontinuity points of the control u(t).
Assume that α0 := ψx = 0 for all ψ ∈M0 (abnormal case).
Let Ξ be the set of solutions ξ ∈ IRs of the system of linear algebraic equations
s∑k=1
eA(ts−tk)[x]kξk = xs+.
Set
Q0(ξ) = maxψ∈M0
s∑
k=1
[ψx]kξ2k − (ψx)s+
.
47

Second order necessary condition
Theorem 14 Let (T,x,u) is a Pontryagin minimum. Then
(a) M0 is nonempty
(b) Q0(ξ) ≥ 0 ∀ξ ∈ Ξ.
48

A simple consequence of geometric nature
Note that Dk(H) = [q]k ∀ τk ∈ Θ, where q = ψx.
Corollary 2 Let (T, x, u) be a Pontryagin minimum and, for some τk ∈ Θ, let
(a) xk− 6= 0, xk+ 6= 0,
(b) [q]k 6= 0 ∀ψ ∈M0,
(c) xk− || xk+ .
Then xk− xk+.
49

Sufficient second order conditions
Theorem 15 For an admissible triple (T, x, u), let there exists ψ ∈M0 such that
[ψx]k > 0, k = 1, . . . , s,
andArg maxu′∈U ψ(t)Bu′ = [u(t−), u(t+)] ∀t ∈ [0, T ],
i.e., u is a strict bang-bang control. Moreover, let
Q0(ξ) > 0 ∀ξ ∈ Ξ.
Then (T, x, u) affords a strict almost global minimum.
50

Example 1: two-dimensional chain
Consider the problemT → min,
x1 = x2, x2 = u, |u| ≤ 1,
x(0) = a, x(T ) = b,
where x = (x1, x2) ∈ IR2, u ∈ IR1.
51

Maximum principle
ψ1 = 0, ψ2 = −ψ1, u = sgn ψ2,
ψ1x2 + ψ2u = α0 ≥ 0, |ψ(0)| = 1, ψ = (ψ1, ψ2).
This implies that
• ψ2(t) is a linear function,
• u(t) is a step function
• u(t) has at most one switching and
• u = ±1.
Consequently,
x1 =u
2x2
2 + C.
52

Any two points can be joined by the extremals in no more than two ways.
Ifα0 := ψx = ψ1x2 + ψ2u > 0
then (T, x, u) is an almost global minimum.
53

54

Let Θ = t1 6= ∅, and α0 := ψx = ψ1x2 + ψ2u = 0. Then
x2(t1) = 0, ⇒ x1− = (0, u1−), x1+ = (0, u1+).
⇒ x1− 6= 0, x2+ 6= 0, x1− x2+.
The necessary second order condition fails.
55

56

Example 2: three-dimensional chain
T → min,
x1 = x2, x2 = x3, x3 = u, |u| ≤ 1,
x(0) = a, x(T ) = b, x = (x1, x2, x3) ∈ IR3.
Let (T, x, u) be an extremal, i.e. there is a nonzero function ψ = (ψ1, ψ2, ψ3) such that
ψ1 = 0, ψ2 = −ψ1, ψ3 = −ψ2, u = sgn ψ3,
ψ1x2 + ψ2x3 + ψ3u = α0 ≥ 0, |ψ(0)| = 1,
It follows that ψ3 is a polynomial of degree at most 2. Hence the number of switchings s ≤ 2.
57
Let s = 2. Then M0 is a singleton, and
ψ3 =u2+
2(t− t1)(t− t2),
where t1 and t2 are switching points.
58

Set τ = t2 − t1, and let uτ be the value of control u(t) = uτ for t ∈ (t1, t2).Let
α0 = ψx = ψ1x2 + ψ2x3 + ψ3u = 0.
For such extremal ψ1x2 + ψ2x3 vanishes at the switching points t1 and t2.This implies that the point (x2(t), x3(t)) on the plane (x2, x3) lies on the line
L1 : x2 = −τ2x3
at time t1, and on on the line
L2 : x2 = −τ2x3
at time t2. On the intervals(0, t1), (t1, t2), (t2, T )
the trajectories (x2(t), x3(t)) are parabolas:
x2 =uτx
22
2+ const.
59

60

Set
ζk =uτx3(tk)
τ, k = 1, 2.
Thenζ2 − ζ1 = 1,
and the form Q on the set Ξ (up to the positive multiplier) has the form
2ζ1ζ2 − 1.
61

The second order conditions have the form:
(a) 2ζ1ζ2 − 1 ≥ 0, (b) 2ζ1ζ2 − 1 > 0.
(a) is necessary for the Pontryagin minimum,
(b) is sufficient for a strict almost global minimum.
Equivalent formulations:
(a′) 2x3(t1)x3(t2) ≥ (t2 − t1)2, (b′) 2x3(t1)x3(t2) > (t2 − t1)
2.
62

Example 3: the problem of the fastest motion of a pendulum controlled by thesuspension point
The problem setting is taken from the book by Chernous’ko, Akulenko and Sokolov ”Controlof oscillations”, Nauka, Moscow, 1980 (in Russian):
T → min,
x1 = x2, x2 = −x1 + u, z = u, |u| ≤ 1,
x(0) = a, x(T ) = b, z(0) = 0, z(T ) = l,
where x = (x1, x2) ∈ IR2, z ∈ IR1, u ∈ IR1, l > 0.
63

Let V (t) be the matrix of clockwise rotation by the angle t,
A = V (π/2), e1 =
(10
), e2 =
(01
).
Thenx = Ax+ e2u.
64

Consider an extremal (T, x, u) having s ≥ 2 switchings. The set M0 for such an extremalconsists of a single pair of functions ψ = (ψ1, ψ2) and ψz satisfying the conditions
ψ = −ψA, ψz = 0, u = sign (ψ2 + ψz),
|ψ(0)| = 1, α0 := ψAx+ (ψ2 + ψz)u ≥ 0, |ψz| < 1.
The condition |ψz| < 1 is due to the presence of switching points, which form the set
Θ = t1, . . . , ts.
65

Let α0 = 0 (otherwise (T, x, u) affords an almost global minimum). Then
ψ(tk)Ax(tk) = 0, , k = 1, . . . , s,
i.e., ψ(tk)∗ is collinear with x(tk), k = 1, . . . , s. Set
ψk = ψ(tk)∗, xk = x(tk), k = 1, . . . , s.
Let ϕ be the angle between ψs−1 and ψs measured clockwise, i.e.,
V (ϕ)ψs−1 = ψs.
66

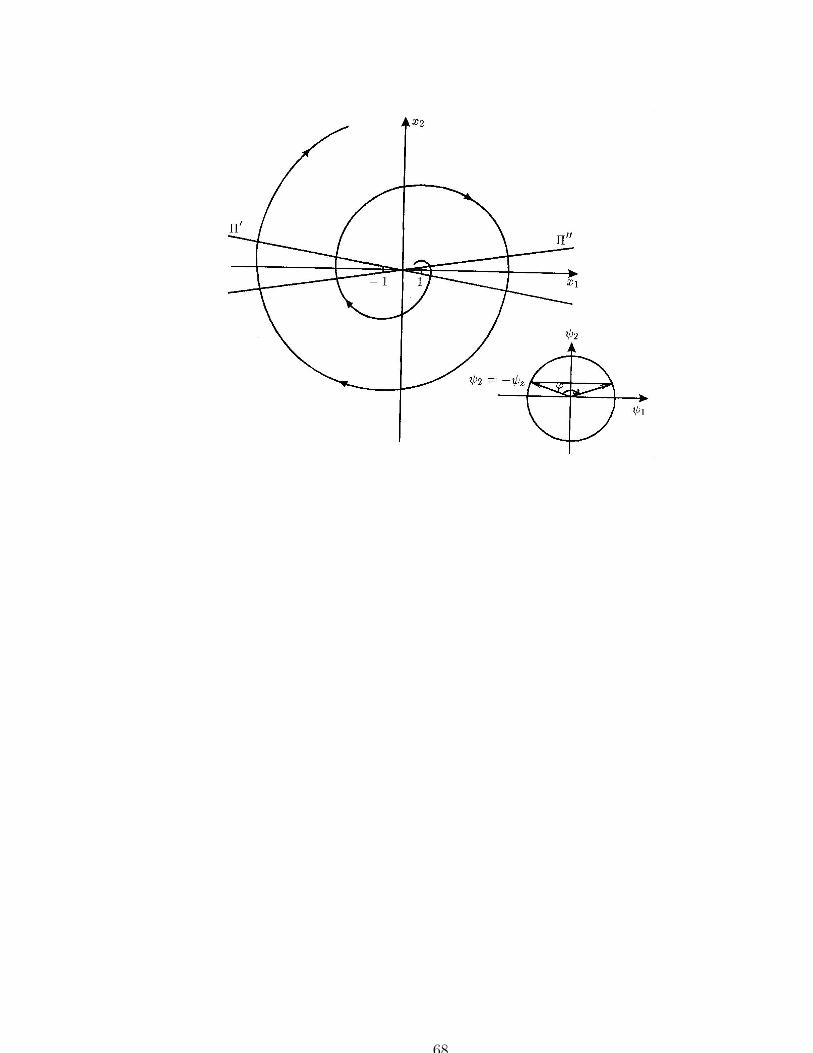
Denote by Π′ the straight line passing through the origin and the point ψs−1.
Denote by Π′′ the straight line passing through the origin and the point ψs.
Then Π′ and Π′′ are the lines that are crossed by the trajectory alternately at timest1, t2, . . . , ts.
Π′ and Π′′ are mutually symmetric with respect to the x1 and x2 axes.
On each interval of the set [0, T ] \ Θ the vectors x(t) − e1u and ψ∗(t) rotate clockwise alongcircles with the center at the origin at a unite velocity.
For the time ϕ, as well as for the time 2π − ϕ, the vector x(t) passes from one of the lines Π′
or Π′′ to the other.
67
68

Assume thatx(0) = a /∈ Π′ ∪ Π′′, x(T ) = b /∈ Π′ ∪ Π′′.
Set
ζk =〈ψ∗(tk), x(tk)〉
2 sin(ϕ/2), k = 1, 2.
Then one can show thatζk+1 − ζk = 1, k = 1, . . . , s− 1,
and the form Q on the set Ξ (up to the positive multiplier) has the form
2ζ1ζs − (s− 1).
Thus the second order conditions have the following simple formulation:
(a) 2ζ1ζ2 − (s− 1) ≥ 0, (b) 2ζ1ζ2 − (s− 1) > 0.
(a) is necessary for the Pontryagin minimum,
(b) is sufficient for a strict almost global minimum.
69

Equivalent conditions:
(a′) |x(tk)| ≥ µs sin(ϕ/2), k = 1, . . . , s,
(b′) |x(tk)| > µs sin(ϕ/2), k = 1, . . . , s,
whereµs =
√s− 1
(√s+ 1−
√s− 1
).
70
Top Related