






Languages
Pages
Legal


Mini-bucket+MPLP/SAC

Solving Min-sum problems
• Exact by Bucket elimination
• Bounding scheme: MBE, MPLP, Soft arc-consistency.
• MBE: capitalize on large cluster processed exactly. Similar to i-consistency for large i (parameter z), directional, non-iterative.
• SAC, MPLP: equivalent to arc-consistency. Can be extended to cluster graphs, but may not be efficient. Based on cost shifting subject t equivalence-preserving transformations (EPT)
• Goal: MBE+MPLP/SAC can improve bounds of both in an efficient way.
scopesS
ffF
DDD
XXX
FDXRCOPfinite
m
m
n
n
},...,{SS
functionscost - },...,{
domains - },...,{
variables- },...,{
:where,, a triple is A
1
1
1
1
)(min*
)(
ionCost Funct Global
1
xFF
XfXF
x
m
i i

MBE
)(min)(min*
jj Qf
f
Qx
fix
xfxff
Let Q={Q1,…Qr} partition of F into mini-buckets whose scope bounded by z:

4
Mini-Bucket Approximation
n
ii
X
X hh1
min
n
rii
X
r
ii
X
X hhg11
minmin
Split a bucket into mini-buckets => bound complexity
)()()O(e :decrease complexity lExponentia n rnr eOeO
bucket (X) ={ h1, …, hr, hr+1, …, hn }
{ h1, …, hr } { hr+1, …, hn }
XX hg

5
Semantics of Mini-Bucket: Splitting a Node
U UÛ
Before Splitting:
Network N
After Splitting:
Network N'
Variables in different buckets are renamed and duplicated (Kask et. al., 2001), (Geffner et. al., 2007), (Choi, Chavira, Darwiche , 2007), (covering graphs, Ihler et. Al 2010.)

Optimal Soft Arc-consistency
)(])[()(''
' xfixcxfFfi
i
Ff
)())}()({(min)(min)(min)()}(|{
xFpxpxfxpxF f
Ff
i
fscopeX
fxifx
i
fscopeif
fxi
ix
i
fp
Ff
fx
Fpxff
max)(min

Algorithm 1: Project and UnaryProject for soft arc andnode consistency enforcing
Procedure Project(cS, i, a, α)c_i(a) ← c_i(a) ⊕ α;foreach (t ∈ (S) such that t[{i}] = a) doc_S(t) ← c_S(t) - α;
Procedure UnaryProject(i, α)c_∅ ← c_∅⊕ α;foreach (a ∈ di) doC_i(a) ← c_i(a) - α;
A variable i is said to be node consistent [Larrosa, 2002]if 1) for all values a ∈ di, ci(a) ⊕ c_∅ = k, 2) there exists avalue b ∈ di such that ci(b) = 0. A WCSP is node consistent(NC) if every variable is node consistent
A value b ∈ dj is a support for a value a ∈ di along cij if cij(a, b) = 0.
Variable i is arc consistent if every value a ∈ di has a support in every constraint cij ∈ C. A WCSP is arc consistent (AC) if every variable is arc and node consistent.

1
1
2
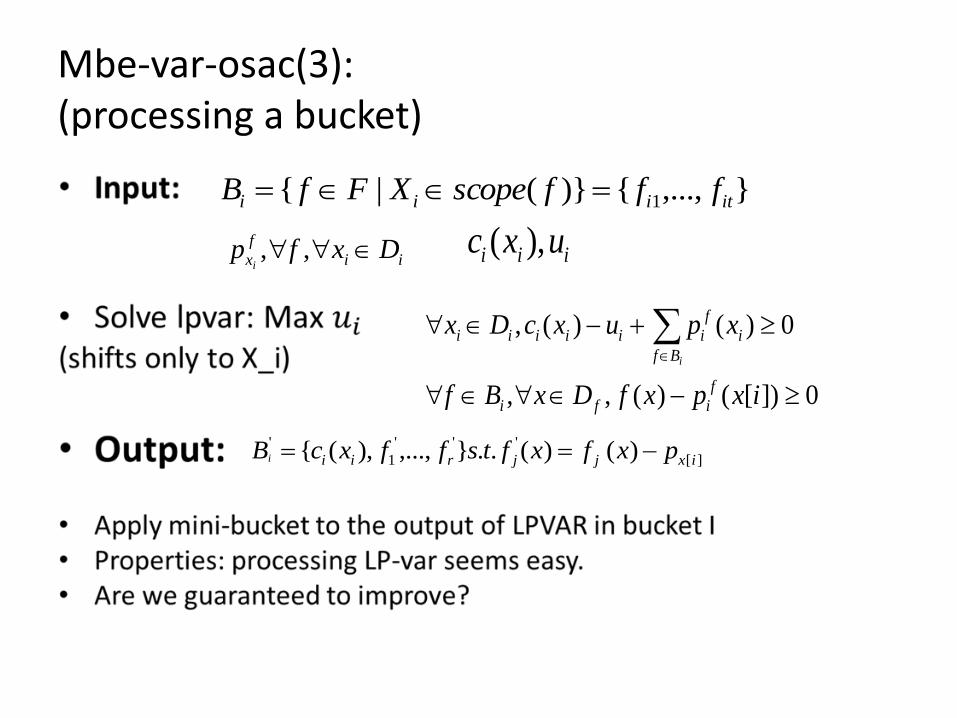
Subtract from source in order to preserve the problem Equivalence Preserving Transformation
Shifting Costs (cost compensation)
w
v v
w
0
0
1
A B1
0
A B fAB
v v 0
v w 0
w v
w w
A gA
v 0
w 11
0
2
1
Elim B
8

• Shifting costs from fAB to AShift(fAB,(A,w),1)
• Can be reversed (e.g. Shift(fAB,(A,w), -1))
0
1
Equivalence Preserving Transformation
w
v v
w
0
0
1
A B1
Arc EPT: shift cost in the scope of 1 cost function
Problem structure preserved
9

OSAC: The Optimal SAC:A continuous linear formulation
• uA : cost shifted from A to f0
• pAaAB: cost shifted from fAB to (A,a)
max ∑ui
n + m.r.d variablesn.d + m.dr linear constraints
Subject to non negativity of costs
10

Optimal Soft AC
• Solved by Linear Programming
• Polynomial time, rational costs (bounded arity r)
• Computes an optimal set of EPT (uA ,pAaAB) to apply
simultaneously
• Stronger than AC, DAC, FDAC, EDAC...(or any local consistency that preserves scopes)
(Cooper et al., IJCAI 2007)
(Boros & Hammer, Discrete Appl. Math. 2002)
(Schlesinger, Kibernetika 1976)
11

The OSAC algorithmP’= OSAC(P)
)(
][
')()(
ij
i
j
fscopeX
f
xtii ptftf
)}({minmax i
q
i
iDx
pq xcFi

Combining MBE with OSAC
• MBE-OSAC(1)
1. Process buckets from i=n to 1.
• Partition into mini-bucket
• {mb_i1,…mb_ij} sum functions in each mini-bucket
• {mb’_i1,…mb’_ij} OSAC{mb_i1,…mb_ij}
• Lambda_ijmax_{X_i} mb’_ij
2. Return the sum of functions in the first bucket.
Properties:
1. The algorithm is exp(z) and solves LP problem in each bucket.
2. The output is a lower bound. But its quality may or may not improve over MBE (question: any guarantee? In practice?)

mbe-osac(2): shift costs based on all bucket variables and then mini-bucket
Input:
Output: messages placed in lower buckets based on their scope.
1.
2. For j=1 to r do (process each mini-bucket)
End.
Properties: May not improve on BME. Will it improve over OSAC? In practice?
},...,{)}(|{ 1 itiii fffscopeXFfB
iri ,...,1
),...,(},...,),(),...,({ 11
''
11 ititililii
osac
i ffOSACffxcxcB ii
'' min)(
ij
iij
QfX
fx
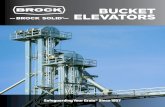
Mbe-var-osac(3): (processing a bucket)
},...,{)}(|{ 1 itiii fffscopeXFfB
ii
f
x Dxfpi
,, iii uxc ),(
0])[()(,,
0)()(,
ixpxfDxBf
xpuxcDx
f
ifi
Bf
i
f
iiiiii
i
][
'''
1
' )()(..},...,),({ ixjjrii pxfxftsffxcBi

Linear relaxation-based schemes(MPLP class, Globerson and Jakkola)
Find:
Best upper bound by Equivalence preserving transformations:
There are several variations of scheme computing the optimizing shifts based on partial gradient descent, which differ by what is being kept constant. The 1.2 task is theDual of a linear relaxation of the original problem.
Is the cost shifted from f to value x_i of X_i.

MPLP block coordinated descent
Return updated functions:

F(x
xxxx

EMPLP and NMPLP

Convergence Properties
Proposition 3 If the fixed point of MPLP has bi(xi) such that for all i the function bi(xi) has ai , then x is the solution to the MAP problem and the LP relaxation is exact.
Proposition 4 When xi are binary, the MPLP fixed point can be used to obtain the primal optimum.

Generalized MPLP

MBE+MPLP
• MPE-MPLP can be combined in a similar ways as with OSAC. Which method can provide guarantee for improvement….
• Use generalized MPLP as a basis…
• Develop directly similar to Alex and Qiang for belief.

Generalized MPLP
Perhaps re-derive generalized MPLP where S (seperators) are just single-variables.We can do that by using a join-graph generated using the mini-bucket schematic method.In this case the seperators within each mini-bucket are the bucket-variable itself.
Considering a covering graph that corresponds to the mini-bucket structure, we can have a collection of shifting costs from mini-bucket to single variables and we canDerive the updating equations associated with the dual that corresponds to this problem.The execution of this algorithm in an ordered derived from the mini-bucket may be a mini-bucket-like algorithm that iterates. (This may be actually identical to Alex and Qiang)

THE ENDWho wants to grab this?

Local Consistency in ConstraintNetworks
• Massive local inference
– Time efficient (local inference, as mini buckets)– Infer only small constraints, added to the network– No variable is eliminated – Produces an equivalent more explicit problem– May detect inconsistency (prune tree search)
Arc consistency inference in the scope of 1 constraint
25

Arc Consistency (binary CSP)• for a constraint cAB and variable A
w
v v
w
0
0
0
0
A B
A B cAB
v v 0
v w 0
w v
w w
A cA
v 0
w
cAB + cB
Elim B
Applied iteratively on all constraint/variables
Confluent, incremental, complexity in O(md2)
Empty domain => inconsistency26

1
Arc Consistency and Cost Functions
• for a cost function fAB and a variable A
w
v v
w
0
0
1
0
A B
2
1
A B fAB
v v 0
v w 0
w v 2
w w 1
A gA
v 0
w 1
fAB + fB
Elim B
EQUIVALENCE LOST
27
1
1
2
Subtract from source in order to preserve the problem Equivalence Preserving Transformation
Shifting Costs (cost compensation)
w
v v
w
0
0
1
A B1
0
A B fAB
v v 0
v w 0
w v
w w
A gA
v 0
w 11
0
2
1
Elim B
28
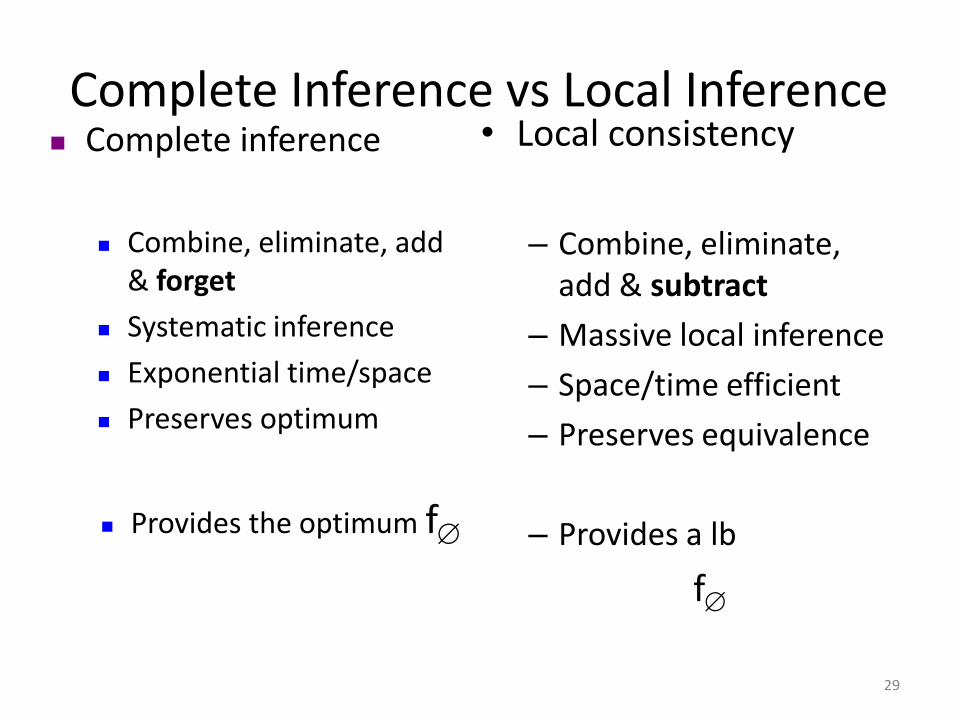
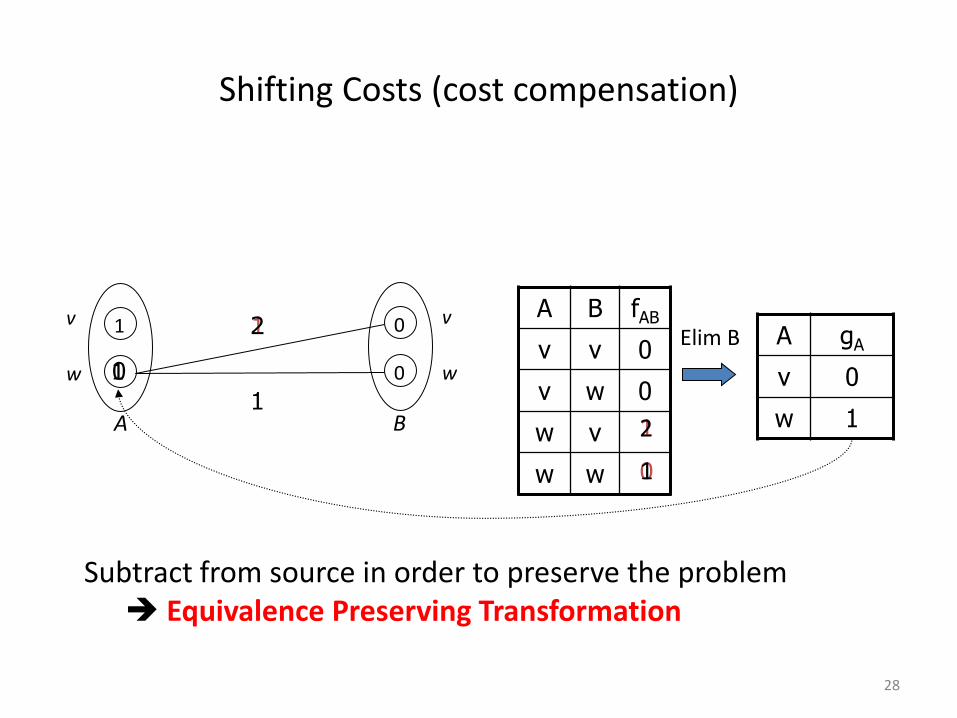
Complete Inference vs Local Inference• Local consistency
– Combine, eliminate, add & subtract
– Massive local inference
– Space/time efficient
– Preserves equivalence
– Provides a lb
f
Complete inference
Combine, eliminate, add & forget
Systematic inference
Exponential time/space
Preserves optimum
Provides the optimum f
29

• Shifting costs from fAB to AShift(fAB,(A,w),1)
• Can be reversed (e.g. Shift(fAB,(A,w), -1))
0
1
Equivalence Preserving Transformation
w
v v
w
0
0
1
A B1
Arc EPT: shift cost in the scope of 1 cost function
Problem structure preserved
30

Equivalence Preserving Transformations
1f =
• EPTs may cycle• EPTs may lead to different f0
•Which EPTs should we apply?
Shift(fAB,(A,b),1)
Shift(fA,(),1) Shift(fAB,(B,a),-1)
Shift(fAB,(B,a),1)
A B A B A B
31

Local Consistency
– Equivalence Preserving Transformation
– Chaotic iteration of EPTs
– Optimal set of EPTs
– Improving sequence of EPTs
32

Local Consistency
– Equivalence Preserving Transformation
– Chaotic iteration of EPTs
• Enforce a local property by one or two EPT(s)
– Optimal set of EPTs
– Improving sequence of EPTs
33

Node Consistency (NC*)
– For any variable A
• a, f + fA(a)<k
• a, fA (a)= 0
– Complexity:O(nd)
w
v
v
v
w
w
f =k =
32
2
11
1
1
1
0
0
1
A
B
C
0
0
014
Shift(fC, ,1) Shift(fA, ,-1);Shift(fA, ,1)
(Larrosa, AAAI 2002)
34

0
Arc Consistency (AC*)
– NC*
– For any fAB
• a b
fAB(a,b)= 0
– b is a support
– complexity:O(n 2d 3)
wv
v
w
w
f =k=4
2
11
1
0
0
0
0
1
A
B
C
1
12
0
Shift(fAC,(C,v),2) Shift(fBC,(B,v),1)
Shift(fBC,(B,w),1)
Shift(fB,,1) Shift(fC,,-2) Shift(fC,,2)
(Larrosa, AAAI 2002)
(Schiex, CP 2000)
35

1
1
Directional AC (DAC*)
– NC*
– For all fAB (A<B)
• a b
fAB(a,b) + fB(b) = 0
– b is a full-support
– complexity:
O(ed 2)
w
v
v
v
w
w
f =k=4
22
2
1
1
1
0
0
0
0
A
B
C
A<B<C
0
1
1
12
(Cooper, Fuzzy Sets and Systems 2003)
Shift(fBC,(C,v),-1) Shift(fBC,(B,v),1) Shift(fBC,(B,w),1) Shift(fB, ,1)
Shift(fA,, -2) Shift(fA,, 2) 36

DAC lb = Mini-Bucket(2) lb
bucket A:
bucket E:
bucket D:
bucket C:
bucket B: f(b,e)
f(a,d)
hE(Ø)
hB(e)
hB(d)
hD(a)
f(a,b)f(b,d)
f(c,e) f(a,c)
hC(e)
lb = lower bound
Mini-buckets
A
B C
D E
A < E < D < C < B
hB(a)
DAC provides an equivalent problem: incrementality DAC+NC (value pruning) can improve lb
hC(a)
37

Other « Chaotic » Local Consistencies
• FDAC* = DAC+AC+NC
– Stronger lower bound
– O(end3)
– Better compromise
• EDAC* = FDAC+ EAC (existential AC)
– Even stronger
– O(ed 2 max{nd, k})
– Currently among the best practical choice
(Larrosa & Schiex, IJCAI 2003)
(Cooper, Fuzzy Sets and Systems 2003)
(Larrosa & Schiex, AI 2004)
(Cooper & Schiex, AI 2004)
(Heras et al., IJCAI 2005)
(Sanchez et al, Constraints 2008)
38

Local Consistency
– Equivalence Preserving Transformation
– Chaotic iteration of EPTs
– Optimal set of simultaneously applied EPTs
• Solve a linear problem in rational costs
– Improving sequence of EPTs
39

Finding an EPT Sequence Maximizing the LB
Bad news
Finding a sequence of integer arc EPTs that maximizes the lower bound defines an NP-hard problem
(Cooper & Schiex, AI 2004)
40

Good news: A continuous linear formulation
• uA : cost shifted from A to f0
• pAaAB: cost shifted from fAB to (A,a)
max ∑ui
n + m.r.d variablesn.d + m.dr linear constraints
Subject to non negativity of costs
41

Optimal Soft AC
solved by Linear Programming
• Polynomial time, rational costs (bounded arity r)
• Computes an optimal set of EPT (uA ,pAaAB) to
apply simultaneously
• Stronger than AC, DAC, FDAC, EDAC...(or any local consistency that preserves scopes)
(Cooper et al., IJCAI 2007)
(Boros & Hammer, Discrete Appl. Math. 2002)
(Schlesinger, Kibernetika 1976)
42

Example-1
1
1
1
1
1
1
f0 = 1
a
bb
c
a c
c
ca
a
X1
X2
X3
X4
AC,DAC,FDAC,EDAC
43

Local Consistency
– Equivalence Preserving Transformation
– Chaotic iteration of EPTs
– Optimal set of EPTs
– Improving sequence of EPTs
• Find an improving sequence using classical arc-
consistency in classical CSPs
44
Top Related