






Languages
Pages
Legal

7/30/2019 Metrics_VTC10_Metrics for Performance Prediction of Wireless Sensor Networks
1/5
Metrics for Performance Prediction
of Wireless Sensor NetworksFrank Oldewurtel and Petri Mahonen
Institute for Networked Systems, RWTH Aachen University
Kackertstrasse 9, D-52072 Aachen, Germany
Email: [email protected]
AbstractWe present the derivation of a novel metric for theperformance prediction of Wireless Sensor Networks (WSNs). Inparticular, the metric can be applied in, for example, monitoringand surveillance applications where WSNs are used. Those
networks execute protocols or techniques that are often sensitiveto spatial correlation. The proposed metric is based on thecorrelation in the sensed phenomenon and the correlation in thelocation of the sensor nodes. The main application area of theperformance prediction metric lies in the design and optimisationof WSNs prior to the costly deployment phase. Since extensivesimulations can be completely avoided it serves as a rapid andlightweight evaluation tool for comparative analysis of WSNs.The concept is applicable and also extensible through mergingof selected performance criteria.
I. INTRODUCTION
Wireless Sensor Networks (WSNs) can greatly enhance
our capability to control and monitor physical phenomena.
Typically, they consist of a large number of nodes, whichare usually resource-constrained sensing devices. Sensor nodes
are battery-operated and have very low capabilities in terms
of computation and communication. A major criterion to
characterise the performance and the operational lifetime of
WSNs is their ability to save energy. Hence, energy con-
sumption is the paramount performance criterion considered.
Depending on the application other criteria can be included
in the overall performance evaluation. Many known phenom-
ena, for example, forest fire or rainfall areas, exhibit certain
subregions or a collection of interesting locations that are
more important than other regions to the application user.
Those interesting points may represent local deviations of thephenomena and can be seen as activities or events. Often most
of the information regarding phenomena can be obtained and
analysed by monitoring such sets of interesting points. In such
scenarios the effectiveness of WSNs is often determined to a
large extent by the sensing coverage provided by the actual
node deployment.
Performance prediction of WSNs is a difficult but highly
important task. Extensive simulations using environments with
increasing level of detail is the primary approach for tackling
this task. The major drawbacks are significant implementation
efforts and long simulation times. Hence, the goal of our
approach is to overcome this situation by deriving a metric
that enables rapid and lightweight prediction of the overall
performance under selected criteria. Similar to simulations,
this metric makes use of input data such as the phenomenon
under study and the chosen network topology. In contrast to
simulations, the proposed metric allows quick and lightweight
evaluation by exploiting two concepts borrowed from the field
of spatial statistics.Recently there has been work on the estimation of the
phenomenon itself facing the energy-distortion trade-off, see,
for example [1]. Furthermore, in the area of power profiling
sensor nodes have been investigated using predicted opera-
tion states and their associated state holding times, see, for
example [2]. Within our scope it has been shown that the
correlation in both the phenomenon data and the locations
of the nodes strongly affect energy consumption, operational
lifetime and sensing coverage [3][6]. However, to the best of
our knowledge there is no approach reported that addresses
the performance prediction of correlation-sensitive WSNs as
proposed in our work. In this paper, we derive the performance
prediction metric considering energy consumption as the majorperformance criterion. In addition, we extend this metric by
including sensing coverage as second criterion exemplarily.
Furthermore, we evaluate the proposed concept through exten-
sive simulations and apply the performance prediction metric
to our use cases.
The remainder of the paper is structured as follows. In
Section II the reference system model is briefly described.
Section III introduces two concepts borrowed from the field
of spatial statistics. In Section IV we derive the performance
prediction metric and evaluate the proposed metric considering
energy consumption as major criterion. Section V extends
the proposed metric by taking into account sensing coverageas second performance criterion. Finally, Section VI draws
conclusions.
II . REFERENCE SYSTEM MODEL
In this section we motivate the reference system model
which consists of five components.
A. Phenomenon model and Deployment model
The physical phenomena monitored by WSNs, e.g., temper-
ature and light intensity usually yields sensed data exhibiting
strong correlations in the spatial domain [7], [8]. In our studies
we make use of synthetically generated and spatially correlated
data fields h(x, y) [9]. The model used is independent on thenode density, the number of nodes or the topology. The gener-
7/30/2019 Metrics_VTC10_Metrics for Performance Prediction of Wireless Sensor Networks
2/5
ated data sampled from the model shows good correspondence
when statistically compared with experimental data.
The node deployment model consists of the specification of
the total number of nodes N, and the coordinates (xi, yi)Ni=1of the individual nodes. We assume a fixed region A witharea |A| and that the coordinates are defined by a random
point process (PP) [10]. PPs were successfully applied to
deployment modeling in, for example, [3], [6].
B. Communication model
In terms of communication we assume that each sensor
node has an omni-directional transmission range and utilizes
erroneous links. For modeling error characteristics a widely
used model is the Gilbert-Elliot bit error model [11]. This
model is fundamentally based on a two-state Markov model
that takes bit error bursts into account. In the case of packeterrors, generated by this model, retransmissions are initiated.
The maximum number of packet retransmissions is based
on the IEEE 802.15.4 specification and is thus set to three.
The physical parameters such as transmission ranges, packet
header size and payload size were determined by the Telos
platform running the embedded operating system TinyOS 2.x.
We apply Distributed Source Coding (DSC) achieving high
energy-efficiency through exploitation of spatial correlations
in the sensed phenomena [12], [13]. In terms of mobility the
sensor nodes are quasi-stationary at known positions and the
overall network density is constant in all cases. Regarding
cluster head selection we focus on the closest-to-center of
gravity scheme. Throughout the scenarios the shortest pathmultihop routing protocol is applied.
C. Observation model and Energy model
The observation model s(x, y) describes the observationsor measurements of the sensed phenomena at the node loca-
tions and can therewith directly and explicitly formulated as
s(x, y) =h(xi, yi) for i{1, . . . , N } and undefined otherwise.We apply the energy model e(xi, yi) introduced in our
previous work [3]. The model takes into account packet header
overhead and the additional energy consumption due to the
DSC-related signal processing such as encoding, joint decod-
ing and entropy tracking. The entropy tracking algorithm esti-mates the underlying joint probability density function (PDF)
of the sensor readings observed by the node pair. The energy
model is essentially based on measurements obtained from real
experiments using the Telos sensor node platform [12].
III . SPATIAL STATISTICS
We shall now outline the techniques used to characterise
correlations both in the spatial phenomena being sensed by
the WSN, and in the locations of the nodes themselves. We
denote the value of the phenomena under study at x R2 byh(x). In order to characterise h using statistics, we assume it tobe a realisation of a random field, that is, a stochastic process
defined on a region of the plane. For most physical phenomena
of interest, such as humidity, atmospheric pressure or the
strength of the magnetic field, nearby samples ofh are heavily
correlated. We can characterise these correlations by means of
the second-order semivariogram (also called semivariance) [9]
(s t) =1
2 Var{h(s) h(t)}. (1)
The reader should note that the value of the semivariogram as
a function of the distance |st| is sufficient for stationary andisotropic h. In our context the two-dimensional isotropic caseis assumed in which the semivariogram depends only upon the
Euclidean distance r between any two locations.To facilitate comparison to the correlations in node loca-
tions, we use instead of the semivariogram the correlogram
defined by
C(s, t) E {h(s)h(t)} (s)(t), (2)
where (s) denotes the mean value of h at s. The be-haviour of the correlogram is opposite to that of the semi-
variogram. Indeed, the semivariogram and the correlogram
are related for sufficiently well-behaved h by the relation(h) = C(0) C(h).
The correlations between measurements of h depend notonly on correlations in h (characterised by the correlogram)but also on correlations in the locations of the sensor nodes
carrying out the measurements. Suppose the nodes have overall
area density A. Intuitively, sensor nodes grouped together(high location correlations) measure more highly correlated
values of the phenomena than nodes deployed on, say, a grid.
Such correlations in node locations can be measured by the
pair correlation function g(r), defined in terms of the jointprobability density
dP = 2Ag(r) dA1 dA2 (3)
of finding one point in each of the two area elements dA1and dA2 separated by the distance r. In the case of totallyrandom locations we obviously have g(r) = 1. High values ofg(r) indicate clustering at the relevant length scale, whereasvalues below one indicate regularity (as is the case for grid,
for example). Integrating the pair correlation function from
zero to a distance r directly yields the expected number ofneighbors at distance r for an arbitrary node in the network.It is thus clearly related to the level of correlation exhibited by
the measurements of the nodes in the network. Pair correlation
functions have been also successfully used to characterise
wireless networks in [14].
IV. PERFORMANCE PREDICTION METRIC
Simulation work in the context of correlation-sensitive
WSNs takes into account the phenomena under study and
the chosen network topology as major input data. While
the correlogram characterises the correlation structure in the
phenomena data the pair correlation function describes the
correlation in the node locations. Considering average energy
consumption Eas the performance criterion we thus argue thatthe performance of WSNs can be expressed as a linear function
of the form e = k f(C(r), g(r)), where k is a constant.
7/30/2019 Metrics_VTC10_Metrics for Performance Prediction of Wireless Sensor Networks
3/5
0 10 20 30 400
5
10
15
20
25
30
distance r
correlation
dph
= 10
dph
= 9
dph = 7d
ph= 5
dph
= 3
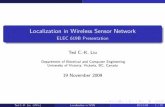
Fig. 1. Correlograms of phenomena exhibiting different correlation distances.
Figure 1 depicts the (empirical) correlograms of the consid-
ered phenomena exhibiting varying correlation distance dph.If the distance between data elements of the phenomena is
more than dph, then they cannot be directly derived from eachother. Hence, we expect that by decreasing dph the correlogramwill converge earlier. In fact, we observe that the shape (in
particular the slope and the convergence behaviour) of the
curve changes as expected dependent on dph. We see that thecorrelogram decreases overall in value as distance is increased,
corresponding to the intuition that far away values are less
correlated than nearby ones.
The pair correlation functions of various topologies are
depicted in Figure 2. The topologies are sampled from two
types of cluster point processes [10]. The Thomas PP is based
on a Poisson PP (uniform random distribution) of intensity Twhich is used to generate cluster centers. Then each parent or
cluster center point is replaced by a cluster of points. The num-
ber of points in each cluster is a Poisson distributed random
variable with mean value T. The locations of nodes in eachcluster are sampled from a normal distribution with variance
2T and the mean located at the cluster center. Another clusterprocess is the Matern PP. As for the Thomas PP, the number
of parent points are distributed according to a Poisson PP with
intensity M. The number of cluster members in each clusteris also sampled from a Poisson distribution with mean M.The only difference lies in how the cluster points themselves
are distributed. While for the Thomas PP a normal distribution
is used, the cluster points of a Matern PP are uniformly
distributed over a disc of radius RM with the respective parentpoint as center. Again, the parent points do not occur in the
resulting realisation of the PP. In our simulations we used the
parameters (T, T) = (M, M) = ( 8.4104, 12) while thethird parameter, T in the Thomas case and RM in the Materncase, controls the cluster spread.
From our analysis we derive the inner product as candi-
date solution for the linear function leading to the proposed
performance prediction metric defined as
=C(r), g(r)
. (4)
0 5 10 15 20 250
2
4
6
8
10
12
distance r
paircorrelation
Matern, RM
= 11
Matern, RM
= 14
Thomas, T = 3
Thomas, T
= 4
Thomas, T
= 5
Fig. 2. Pair correlation functions of the considered topologies; sampled fromdifferent types of random point processes with varying cluster spread.
Maximising leads to large metric values indicating minimalenergy consumption. For evaluation we conducted extensive
simulations (2000 runs each) obtaining average energy con-
sumption values E and computed the respective -metricvalues using equation 4. Figure 3 shows the energy consumed
vs. the prediction metric. Interconnected data points belong
to phenomena with identical dph. Markers indicate specifictopologies. From Figure 3 we observe that the energy con-
sumption is directly related to the performance prediction
metric, i.e. E . This interesting relation holds across allconsidered topologies with arbitrary but fixed dph. Further-more, Figure 4 is similar to Figure 3 but in contrast shows
interconnected data points which belong to arbitrary but fixed
topologies deployed on phenomena with varying dph. We havefound that E is again directly related to for any particulartopology across phenomena exhibiting different dph.
As a result, the inner product can be used as a lightweight
and powerful metric for the performance prediction of WSNs.
It is based on C(r) and g(r) solely. While only the correla-tion structure of the phenomenon needs to be estimated the
pair correlation functions of candidate topologies need to be
stored using a minimal amount of memory. Using prior
to the costly WSN deployment is a lightweight approach tosignificantly improve the cost-efficiency of the system. Since
extensive simulations can be completely avoided during the
system design phase this metric enables rapid comparative
performance evaluation of various deployment strategies.
V. EXTENDED METRIC AND ITS APPLICATION
Depending on the application other performance criteria can
play an important role. Since the effectiveness of WSNs is
often dependent on the sensing coverage we extend the per-
formance prediction metric by considering sensing coverage as
second criterion. Full sensing coverage (100 %) is achieved if
the deployed nodes cover at least the collection of interesting
locations of the phenomenon. We denote all those locations
as the set of points of interest (POI). POI is essentially
a point cloud which is selected based on significant local
7/30/2019 Metrics_VTC10_Metrics for Performance Prediction of Wireless Sensor Networks
4/5
0 200 400 600 800 1000550
600
650
700
750
800
850
900
performance prediction metric
averageenergyconsumed
[J]
Matern, RM
= 11
Matern, RM
= 14
Thomas, T
= 3
Thomas, T
= 4
Thomas, T
= 5
dph
= 3
dph
= 7
dph
= 5
dph
= 10
dph
= 9
Fig. 3. Direct relationship between performance prediction metric and
energy consumption according to varying correlation distance dph; markersindicate specific topologies.
deviations of the actual neighbouring phenomenon values.
Those deviations represent the highest information content and
are assumed to be most important to the application user. It
is noteworthy that nodes deployed in the area that do not
cover the POI still provide less but useful information. In
order to identify the POI we particularly apply the Laplace
operator and low-pass filtering to the entire phenomenon.
The Laplace operator on the function f is in the two-
dimensional cartesian case a second order differential operatorof the form f = 2f =
2fx2
+ 2f
y2. From the POI we can
derive a priori information which can be incorporated into the
random deployment models in order to improve the sensing
coverage of WSNs. The analysis of enhanced deployment
models exploiting a priori information has been presented in
our previous works [6], [15] and is not the focus of this paper.
However, in Table I we include a fraction of our results
adopted from [6] to be self-contained. Focusing on phenomena
with dph = 10 exemplarily, Table I lists simulation results (2000runs) such as average energy consumption E and averagesensing coverage v in respect to various deployment models.
The parameters of the models where estimated from the POIusing the minimum contrast method [16]. The term parent-
modified refers to the case where the parent point locations
(cluster centers) are restricted to lie on the first principal
component of the POI. In addition, the term non-symmetric
refers to case where the shape of the node distribution in each
cluster is dependent on the shape factor . Both options areexamples of how phenomena-related a priori information can
be exploited in order to improve the sensing coverage of the
deployment.
From our analysis, we find that the degree of similarity
between the PDFs of the POI and the chosen deployment
model is directly related to sensing coverage. As similarity
measures to estimate the distance between distributions we
take into account the Kullback-Leibler divergence [17] and
the Hellinger metric [18]. The symmetric Kullback-Leibler
0 200 400 600 800 1000550
600
650
700
750
800
850
900
performance prediction metric
averageenergyconsumed
[J]
Matern, RM
= 11
Matern, RM
= 14
Thomas, T
= 3
Thomas, T
= 4
Thomas, T
= 5
Fig. 4. Direct relationship between performance prediciton metric and
energy consumption according to various topologies.
divergence of two PDFs p and q is defined as
KL(p, q) = D(p||q) + D(q||p), with (5)
D(p||q) =
p(x)logp(x)/q(x)
.
Furthermore, the Hellinger metric is defined as
HM =
j
p(xj)
q(xj)
2 12. (6)
It is preferred to not rely on similarity measures that operate
on PDFs solely since those may be misleading. Hence, we
use in addition the Kolmogorov-Smirnov statistic [19] and the
Area metric which operate on cumulative distribution functions
(CDFs). The weighted Kolmogorov-Smirnov metric is defined
as
KS= maxx
|I(x) M(x)|/
M(x)
1 M(x)
, (7)
where I is the CDF of the POI and M is the CDF of thechosen deployment model. Furthermore, the Area metric Q asapplied in, for example, [20] is defined as
Q(I,M) =
1
J
J
j=1
log(I
1
(j/J)) log(M1
(j/J))
log(I1(1/J)) log(M1(1/J))2J
log(I1(1)) log(M1(1))2J
,
(8)
where J denotes the size of the observation window. Sincean increasing degree of similarity of two distribution func-
tions implies decreasing values in the distance between those
functions we denote the similarity measure in the case ofPDF-based measures = 1/KL and = 1/HM, respectively.Similarly in the case of CDF-based measures it follows
= 1/KS and = 1/Q, respectively. The extended predictionmetric can then be defined as
= , (9)
7/30/2019 Metrics_VTC10_Metrics for Performance Prediction of Wireless Sensor Networks
5/5
TABLE IAVERAGE ENERGY CONSUMPTION EAND SENSING COVERAGE v
No. Model description E[J] v[%]
1 Poisson (P = 0.0313) 1066.20 2.99
2 Thomas (T, T, T)(1.12103, 27.9, 5.0) 797.4 3 3 .29
5 Parent-mod. non-sym. Thomas (= 2) 802.37 9.106 Parent-mod. non-sym. Thomas (= 3) 804.03 9.237 Matern (M, M, RM)(1.1510
3, 27.1, 9.4) 678.4 0 3 .5010 Parent-mod. non-sym. Matern (= 2) 626.27 9.5411 Parent-mod. non-sym. Matern (= 3) 628.55 10.53
where denotes the introduced performance prediction metricaccording to energy consumption. For the evaluation of the
deployment strategies we develop the -metric
= v/E, (10)
which takes into account simulation results such as energyconsumption E and sensing coverage v.
Figure 5 shows the direct relationship between the extended
prediction metric and the -metric considering the deploy-ment strategies achieving largest v-values. Markers indicatethe topology type 5, 6, 10 and 11 from Table I. We can see
the behaviour of all considered similarity measures in respect
to the best performing deployment strategies. While all curves
behave similarly we observe that the CDF-based curves allow
a more clear distinction. Figure 5 shows that the extended
prediction metric can be used instead of the -metric whichcaptures the overall performance of WSNs from simulations
viewpoint. Thus, the concept of the performance prediction
metric is applicable and can also be extended through merging
of selected performance criteria.
V I. CONCLUSIONS
In this paper we presented the derivation of a novel metric
for the performance prediction of Wireless Sensor Networks
(WSNs). The proposed metric is based on the correlation in
the sensed phenomenon and the correlation in the location of
the sensor nodes. The main application area of the perfor-
mance prediction metric lies in the design and optimization of
WSNs prior to the costly deployment phase. Since extensive
simulations can be completely avoided it serves as a rapid
and lightweight evaluation tool for comparative analysis ofWSNs. We have shown that this concept is applicable and also
extensible through merging of selected performance criteria.
ACKNOWLEDGMENT
This work was financially supported by the German Re-
search Foundation (DFG) through the UMIC-research centre
at the RWTH Aachen University. We would like to thank Janne
Riihijarvi for stimulating discussions on spatial statistics.
REFERENCES
[1] W. Bajwa, J. Haupt, A. Sayeed, and R. Nowak, Joint Source-ChannelCommunication for Distributed Estimation in Sensor Networks, IEEETrans. on Information Theory, vol. 53, no. 10, pp. 36293653, 2007.
[2] V. Shnayder, M. Hempstead, B. Chen, G. W. Allen, and M. Welsh,Simulating the power consumption of large-scale sensor network ap-plications, in Proceedings of the SENSYS, Baltimore, USA, 2004, pp.188200.
11 12 13 14 15 16 1710
3.2
103.4
103.6
103.8
metric 1000
metric
KL
HM
KS
Q
type 5
type 6type 10
type 11
Fig. 5. Relation between and -metric in respect to the consideredsimilarity measures; markers indicate the topology type.
[3] F. Oldewurtel and P. Mahonen, Efficiency Analysis and Derivation ofEnhanced Deployment Models for Sensor Networks, Int. Journal of Ad
Hoc and Ubiquitous Computing (IJAHUC), 2010, accepted.
[4] Y. Zou and K. Chakrabarty, Sensor Deployment and Target Localizationin Distributed Sensor Networks, ACM Trans. on Embedded ComputingSystems (TECS), vol. 3, no. 1, pp. 6191, 2004.
[5] G. Wang, G. Cao, and T. L. Porta, Movement-Assisted Sensor Deploy-ment, IEEE Trans. on Mobile Computing, vol. 5, no. 6, pp. 640652,2006.
[6] F. Oldewurtel and P. Mahonen, Analysis of Enhanced DeploymentModels for Sensor Networks, in Proceedings of the VTC spring, Taipei,Taiwan, 2010, accepted.
[7] S. Pattem, B. Krishnamachari, and R. Govindan, The Impact of SpatialCorrelation on Routing with Compression in Wireless Sensor Networks,
ACM Trans. on Sensor Networks (TOSN), vol. 4, no. 4, pp. 133, 2008.[8] F. Oldewurtel, J. Ansari, and P. Mahonen, Cross-Layer Design for Dis-
tributed Source Coding in Wireless Sensor Networks, in Proceedingsof the SENSORCOMM, Cap Esterel, France, 2008, pp. 435443.
[9] A. Jindal and K. Psounis, Modeling Spatially Correlated Data in SensorNetworks, ACM Trans. on Sensor Networks (TOSN), vol. 2, no. 4, pp.466499, 2006.
[10] D. Stoyan, W. S. Kendall, and J. Mecke, Stochastic Geometry and itsApplications. Wiley, 1995.
[11] J.-P. Ebert, A. Willig, and A. Wolisz, A Gilbert-Elliot Bit Error Modeland the Efficient Use in Packet Level Simulation, in TKN technicalreport TKN-99-002, 1999.
[12] F. Oldewurtel, M. Foks, and P. Mahonen, On a Practical DistributedSource Coding Scheme for Wireless Sensor Networks, in Proceedingsof the VTC spring, Marina Bay, Singapore, March 2008, pp. 228232.
[13] F. Oldewurtel, J. Riihijarvi, and P. Mahonen, Efficiency of Distributed
Compression and its Dependence on Sensor Node Deployments, inProceedings of the VTC spring, Taipei, Taiwan, 2010, accepted.
[14] J. Riihijarvi, P. Mahonen, and M. Rubsamen, Characterizing Wire-less Networks by Spatial Correlations, IEEE Communications Letters,vol. 11, no. 1, pp. 3739, 2007.
[15] F. Oldewurtel and P. Mahonen, Estimation and Evaluation of Deploy-ment Models for Sensor Networks, in Proceedings of the VTC fall,Anchorage, USA, 2009, pp. 15.
[16] P. J. Diggle and R. J. Gratton, Monte Carlo Methods of Inference forImplicit Statistical Models, Journal of the Royal Statistical Society,vol. 46, no. 2, pp. 193227, 1984.
[17] T. M. Cover and J. A. Thomas, Elements of Information Theory. Wiley,2006.
[18] A. Ferrante, M. Pavon, and F. Ramponi, Hellinger versus Kullback-Leibler Multivariable Spectrum Approximation, IEEE Trans. on Auto-matic Control, vol. 53, no. 4, pp. 954967, 2008.
[19] F. Massey, The Kolmogorov-Smirnov test for Goodness of Fit, Journal
of the American Statistical Assoc., vol. 46, no. 253, pp. 6878, 1951.[20] M. Wellens, J. Riihijarvi, and P. Mahonen, Empirical Time and Fre-
quency Domain Models of Spectrum Use, Elsevier Physical Commu-nication, vol. 2, no. 1-2, pp. 1032, 2009.
Top Related