






Languages
Pages
Legal

Low Cost UAS for
Mapping via Google
Application
Stacey Lyle, PhD, RPLS
Associate Professor
Texas A&M University Corpus Christi Texas
School of Engineering and Computer Science
Conrad Blucher Institute for Surveying
And Science
Texas A&M University
Corpus Christi
The Island University
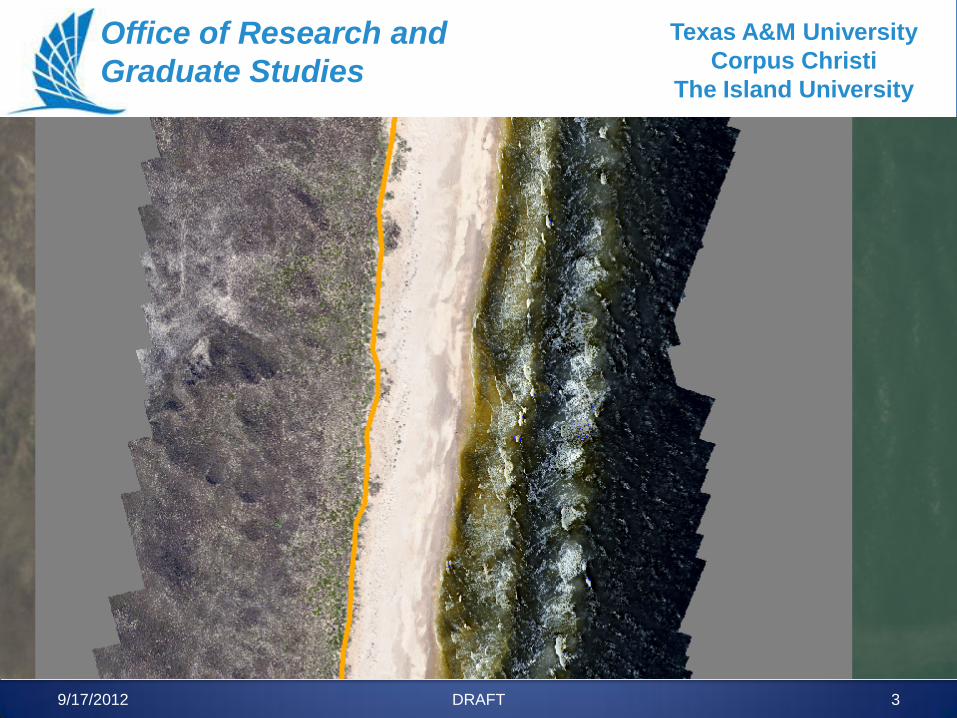
Office of Research and
Graduate Studies
N UAS
Dd
D
D
Conrad Blucher Institute
for Surveying and
Science
Texas A&M University
Corpus Christi
The Island University
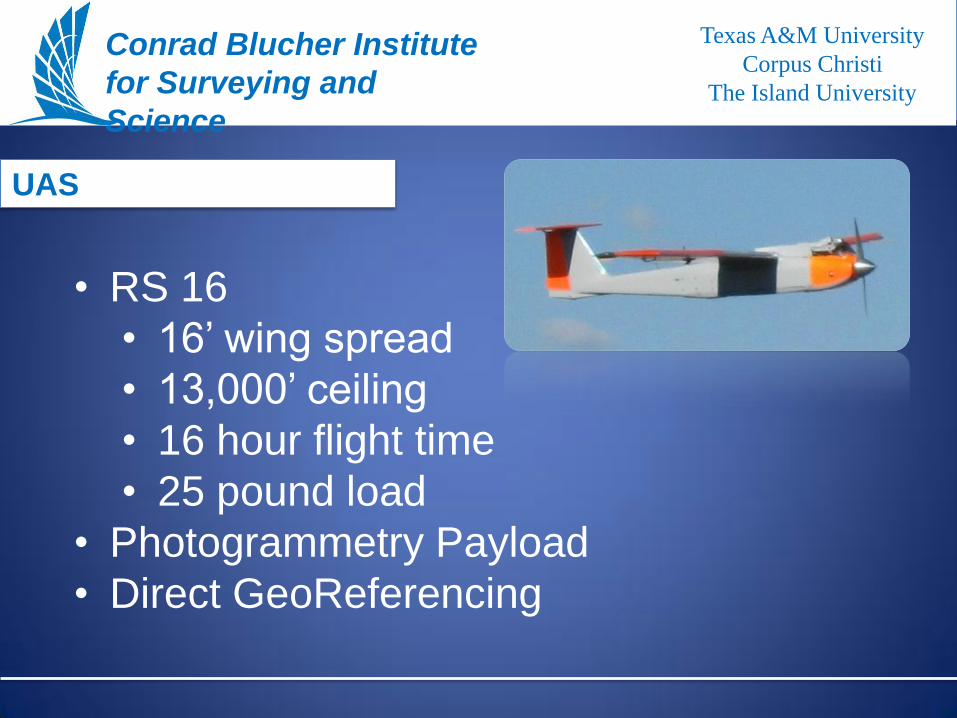
• RS 16
• 16’ wing spread
• 13,000’ ceiling
• 16 hour flight time
• 25 pound load
• Photogrammetry Payload
• Direct GeoReferencing
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
9/17/2012 DRAFT 3
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
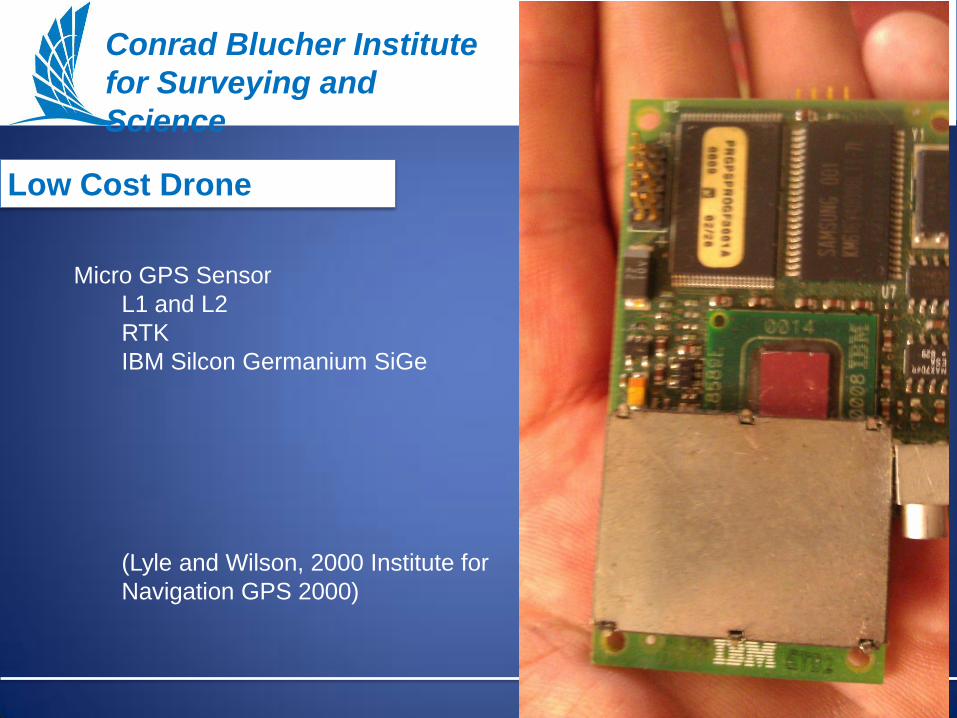
N Low Cost Drone
Dd
D
D
Conrad Blucher Institute
for Surveying and
Science
Texas A&M University
Corpus Christi
The Island University
Micro GPS Sensor
L1 and L2
RTK
IBM Silcon Germanium SiGe
(Lyle and Wilson, 2000 Institute for
Navigation GPS 2000)
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
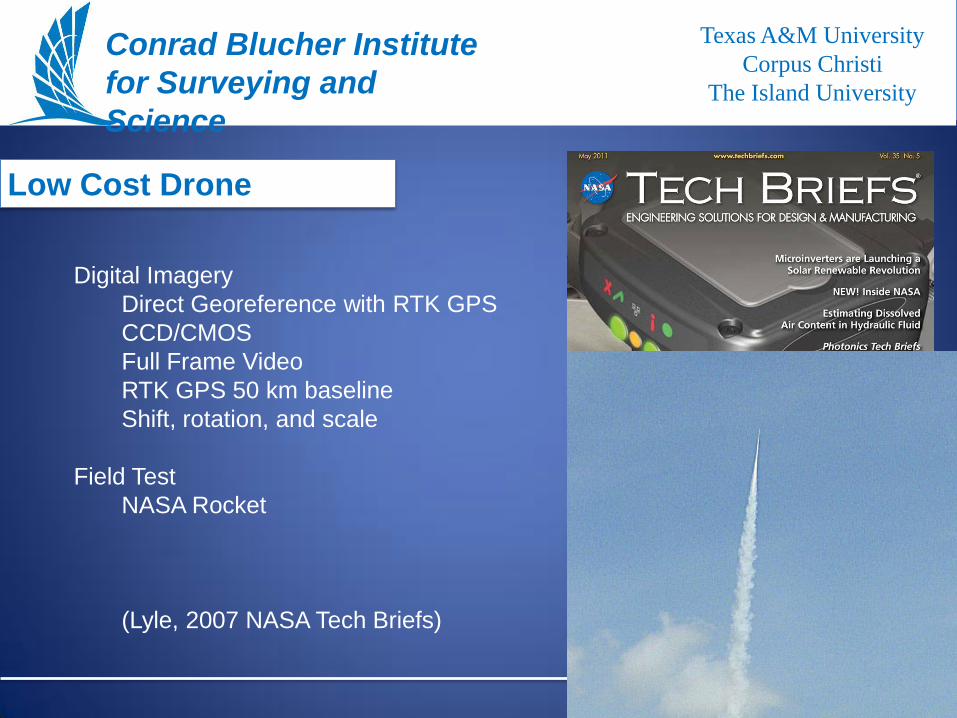
N Low Cost Drone
Dd
D
D
Conrad Blucher Institute
for Surveying and
Science
Texas A&M University
Corpus Christi
The Island University
Digital Imagery
Direct Georeference with RTK GPS
CCD/CMOS
Full Frame Video
RTK GPS 50 km baseline
Shift, rotation, and scale
Field Test
NASA Rocket
(Lyle, 2007 NASA Tech Briefs)
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
9/17/2012 DRAFT 6
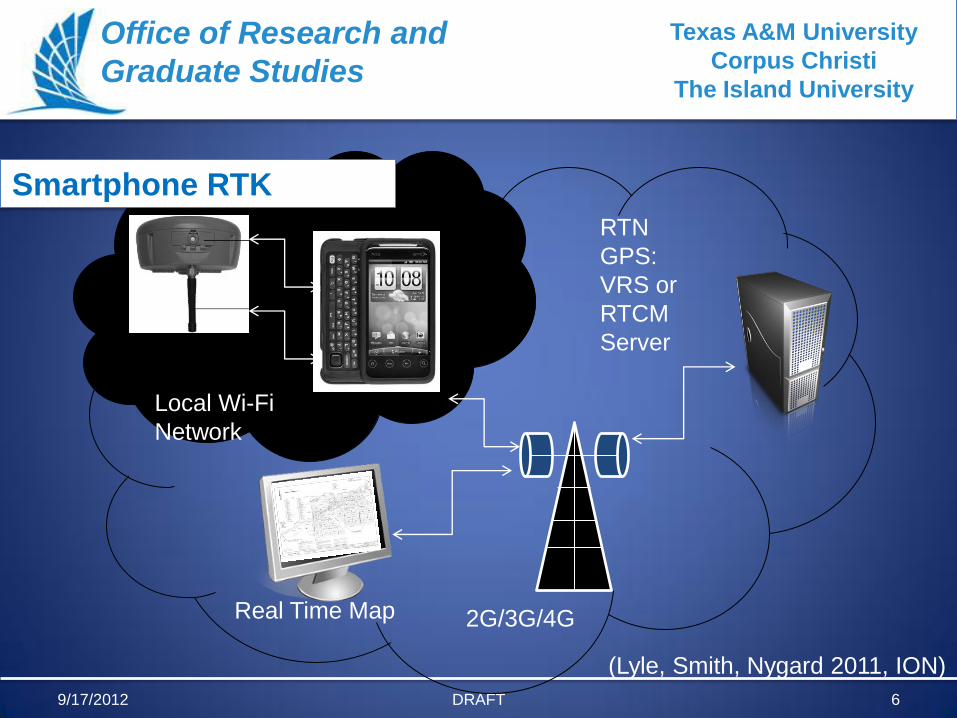
RTN
GPS:
VRS or
RTCM
Server
2G/3G/4G
Local Wi-Fi
Network
Real Time Map
N Smartphone RTK
(Lyle, Smith, Nygard 2011, ION)
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
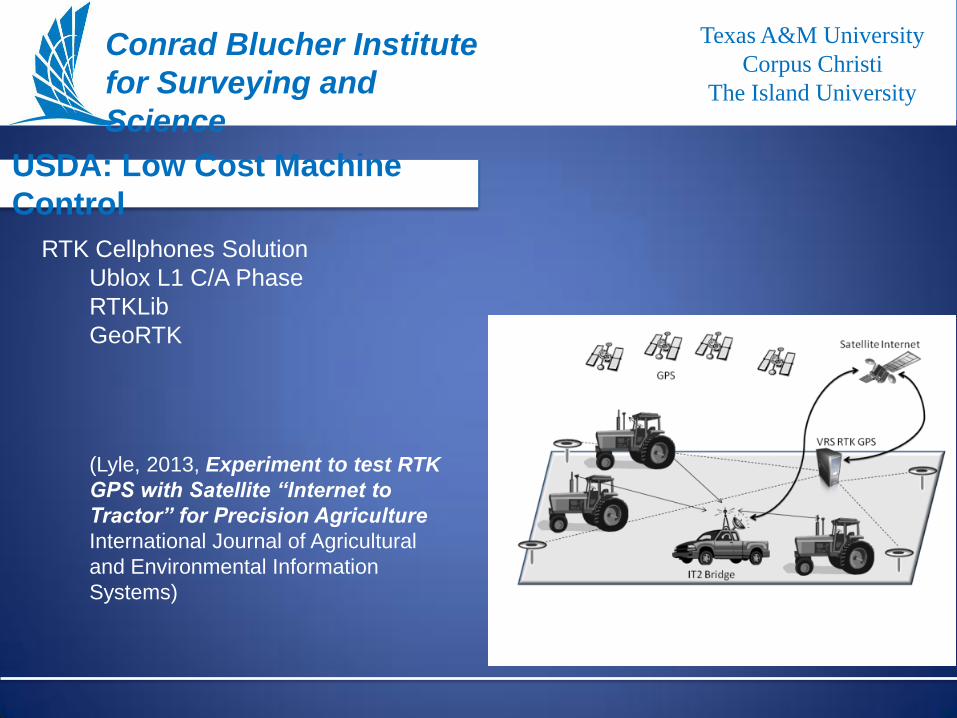
N USDA: Low Cost Machine
Control
Dd
D
D
Conrad Blucher Institute
for Surveying and
Science
Texas A&M University
Corpus Christi
The Island University
RTK Cellphones Solution
Ublox L1 C/A Phase
RTKLib
GeoRTK
(Lyle, 2013, Experiment to test RTK
GPS with Satellite “Internet to
Tractor” for Precision Agriculture
International Journal of Agricultural
and Environmental Information
Systems)
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
N
9/17/2012 8
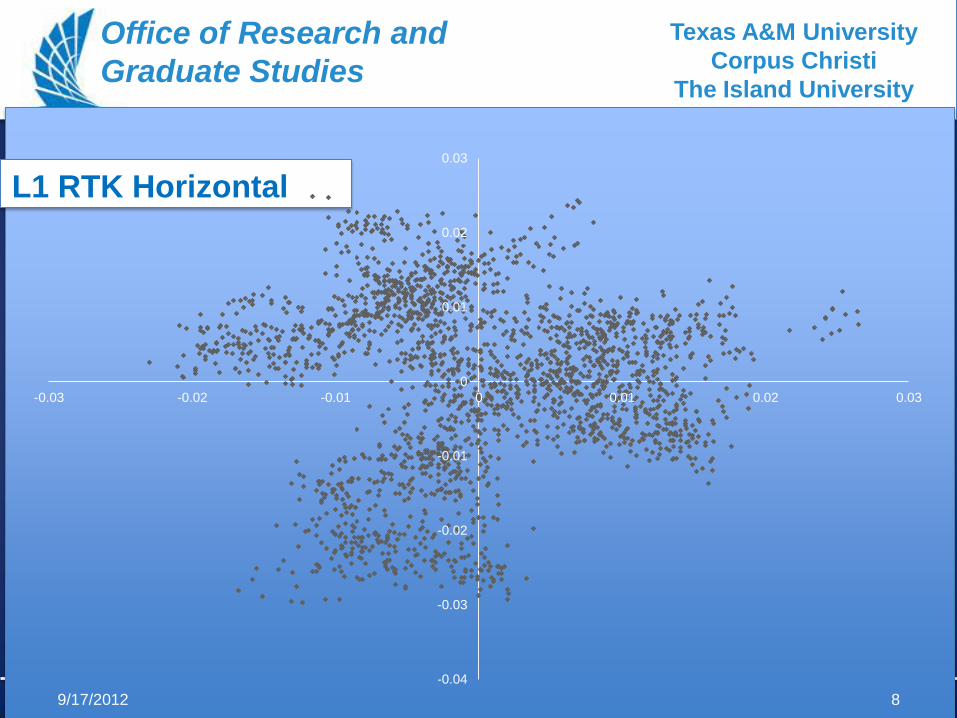
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
-0.03 -0.02 -0.01 0 0.01 0.02 0.03
L1 RTK Horizontal
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
N
9/17/2012 9
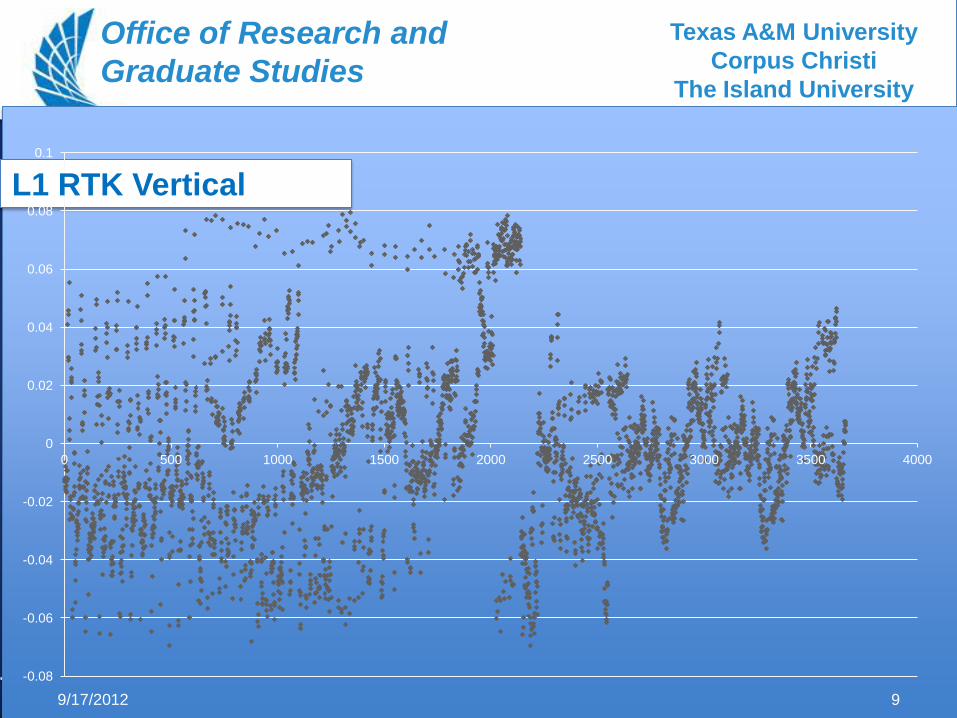
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0 500 1000 1500 2000 2500 3000 3500 4000
L1 RTK Vertical
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
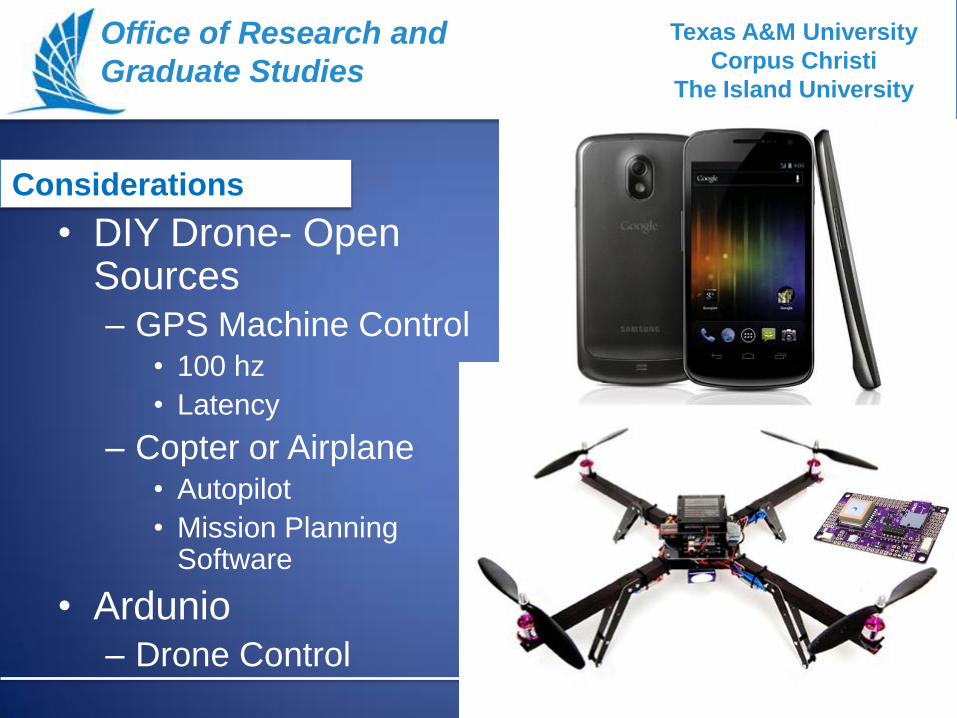
• DIY Drone- Open Sources
– GPS Machine Control • 100 hz
• Latency
– Copter or Airplane • Autopilot
• Mission Planning Software
• Ardunio
– Drone Control
N Considerations
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
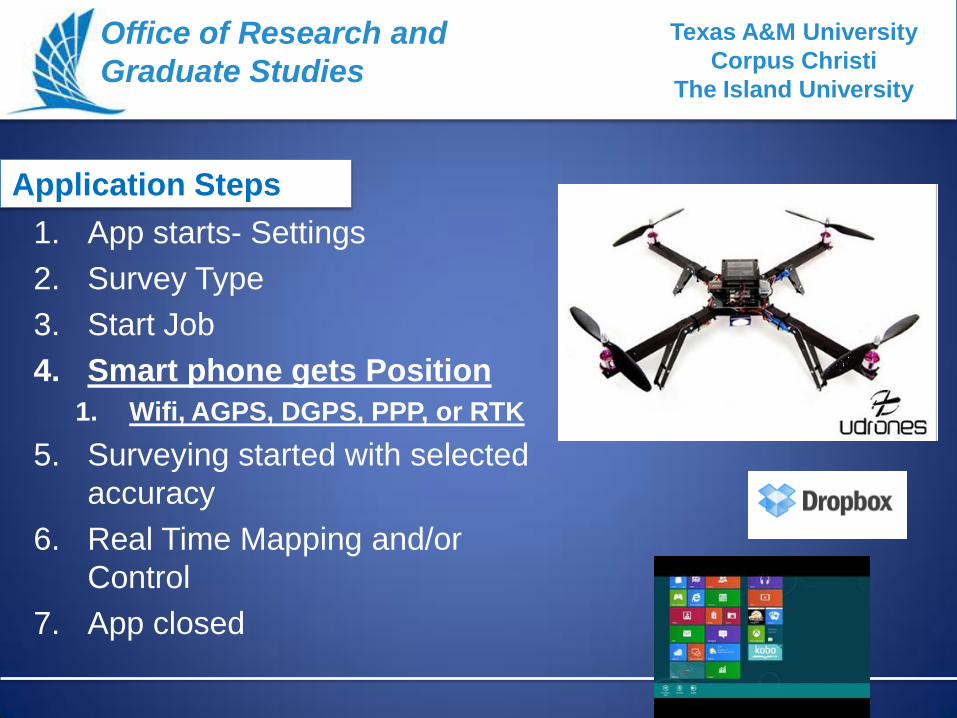
1. App starts- Settings
2. Survey Type
3. Start Job
4. Smart phone gets Position
1. Wifi, AGPS, DGPS, PPP, or RTK
5. Surveying started with selected
accuracy
6. Real Time Mapping and/or
Control
7. App closed
N Application Steps

Texas A&M University
Corpus Christi
The Island University
Office of Research and
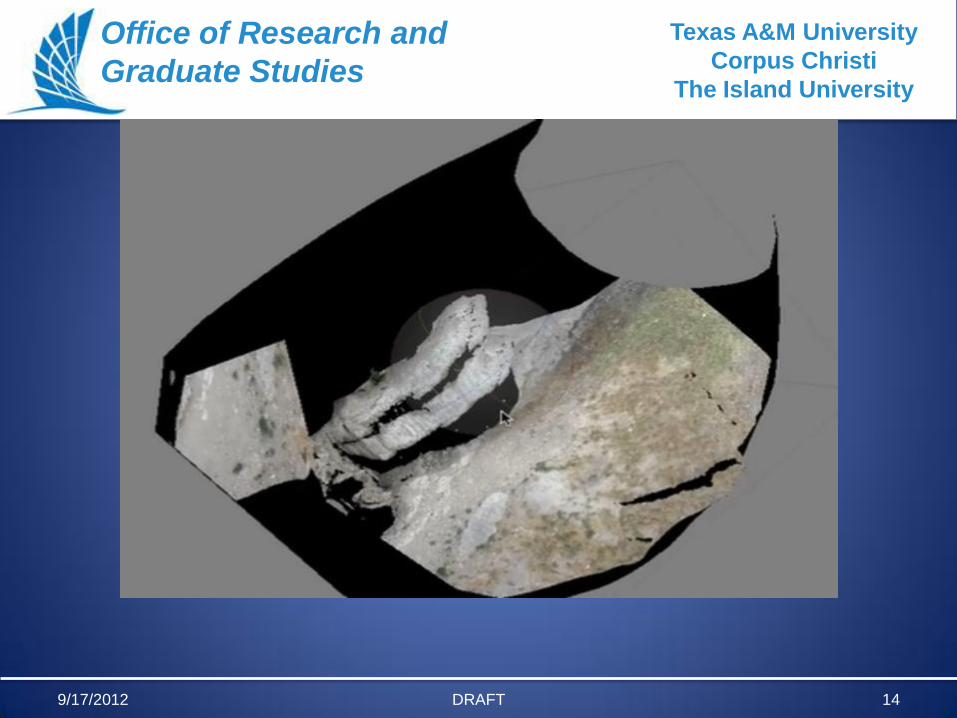
Graduate Studies Product

Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
9/17/2012 DRAFT 13
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
9/17/2012 DRAFT 14
Texas A&M University
Corpus Christi
The Island University
Office of Research and
Graduate Studies
N
Stacey D. Lyle
6300 Ocean Drive
Corpus Christi, Texas 78412
361-548-8852
Thank You
Top Related