





Languages
Pages
Legal


Representation Theories of the Symmetric Group and the Rook Monoid
Representation Theories of the Symmetric
Group and the Rook Monoid
Tânia Soa Zaragoza Cotrim Silva
Young Women in Representation Theory
Mathematical Institute of the University of Bonn
June 24, 2016

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
The special case of the Symmetric Group
n.o of isoclasses of Irr. Rep.of G = n.o of conjugacy classes in G
Two permutations are conjugate if and only if they have the same
cycle type
n.o of isoclasses of Irr. Rep. of Sn = n.o of partitions of n

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
The special case of the Symmetric Group
n.o of isoclasses of Irr. Rep.of G = n.o of conjugacy classes in G
Two permutations are conjugate if and only if they have the same
cycle type
n.o of isoclasses of Irr. Rep. of Sn = n.o of partitions of n

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
The special case of the Symmetric Group
n.o of isoclasses of Irr. Rep.of G = n.o of conjugacy classes in G
Two permutations are conjugate if and only if they have the same
cycle type
n.o of isoclasses of Irr. Rep. of Sn = n.o of partitions of n

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
Isoclasses of Irreducible Representations of Sn
(1) n = 1
(1,1)(2) n = 2
(2,1)(3) (1,1,1) n = 3
(3,1) (2,2) (2,1,1)(4) (1,1,1,1) n = 4
(5) (4,1) (3,2) (3,1,1) (2,2,1) (2,1,1,1) (1,1,1,1,1) n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
Isoclasses of Irreducible Representations of Sn
(1) n = 1
(1,1)(2) n = 2
(2,1)(3) (1,1,1) n = 3
(3,1) (2,2) (2,1,1)(4) (1,1,1,1) n = 4
(5) (4,1) (3,2) (3,1,1) (2,2,1) (2,1,1,1) (1,1,1,1,1) n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
Isoclasses of Irreducible Representations of Sn
(1) n = 1
(1,1)(2) n = 2
(2,1)(3) (1,1,1) n = 3
(3,1) (2,2) (2,1,1)(4) (1,1,1,1) n = 4
(5) (4,1) (3,2) (3,1,1) (2,2,1) (2,1,1,1) (1,1,1,1,1) n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
Isoclasses of Irreducible Representations of Sn
(1) n = 1
(1,1)(2) n = 2
(2,1)(3) (1,1,1) n = 3
(3,1) (2,2) (2,1,1)(4) (1,1,1,1) n = 4
(5) (4,1) (3,2) (3,1,1) (2,2,1) (2,1,1,1) (1,1,1,1,1) n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
Isoclasses of Irreducible Representations of Sn
(1) n = 1
(1,1)(2) n = 2
(2,1)(3) (1,1,1) n = 3
(3,1) (2,2) (2,1,1)(4) (1,1,1,1) n = 4
(5) (4,1) (3,2) (3,1,1) (2,2,1) (2,1,1,1) (1,1,1,1,1) n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
IrrRep(Sn)
CSn
construction
Pn
cardinali
ty
Young diagrams

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Introduction
IrrRep(Sn)
CSn
construction
Pn
cardinali
ty
Young diagrams

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Classic Approach
λ
partition of n
←→
Sλ
Specht module
←→
classe of irreducible
Sn−representations
Young Symmetrizer V (2,1)
Young diagram of
the partition(2,1)Irreducible representation
of S3

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Classic Approach
λ
partition of n
←→
Sλ
Specht module
←→
classe of irreducible
Sn−representations
Young Symmetrizer V (2,1)
Young diagram of
the partition(2,1)Irreducible representation
of S3

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Constructing the Specht Modules of S3λ1 = (3) λ2 = (2, 1) λ3 = (1, 1, 1)
1 2 31 23
123
Rλ1 = S3
Cλ1 = (1)Rλ2 = (1), (1 2)Cλ3 = (1), (1 3)
Rλ3 = (1)Cλ3 = S3
Young symmetrizers
sλi =
( ∑σ∈Rλi
σ
)( ∑σ∈Cλi
sign(σ)σ
)∈ CS3
CS3 · sλ1 CS3 · sλ2 CS3 · sλ3C∑
σ∈S3σ Csλ2+Cx C
∑σ∈S3
sgn(σ)σ

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Constructing the Specht Modules of S3λ1 = (3) λ2 = (2, 1) λ3 = (1, 1, 1)
1 2 31 23
123
Rλ1 = S3
Cλ1 = (1)Rλ2 = (1), (1 2)Cλ3 = (1), (1 3)
Rλ3 = (1)Cλ3 = S3
Young symmetrizers
sλi =
( ∑σ∈Rλi
σ
)( ∑σ∈Cλi
sign(σ)σ
)∈ CS3
CS3 · sλ1 CS3 · sλ2 CS3 · sλ3C∑
σ∈S3σ Csλ2+Cx C
∑σ∈S3
sgn(σ)σ

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Constructing the Specht Modules of S3λ1 = (3) λ2 = (2, 1) λ3 = (1, 1, 1)
1 2 31 23
123
Rλ1 = S3
Cλ1 = (1)Rλ2 = (1), (1 2)Cλ3 = (1), (1 3)
Rλ3 = (1)Cλ3 = S3
Young symmetrizers
sλi =
( ∑σ∈Rλi
σ
)( ∑σ∈Cλi
sign(σ)σ
)∈ CS3
CS3 · sλ1 CS3 · sλ2 CS3 · sλ3C∑
σ∈S3σ Csλ2+Cx C
∑σ∈S3
sgn(σ)σ

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Constructing the Specht Modules of S3λ1 = (3) λ2 = (2, 1) λ3 = (1, 1, 1)
1 2 31 23
123
Rλ1 = S3
Cλ1 = (1)Rλ2 = (1), (1 2)Cλ3 = (1), (1 3)
Rλ3 = (1)Cλ3 = S3
Young symmetrizers
sλi =
( ∑σ∈Rλi
σ
)( ∑σ∈Cλi
sign(σ)σ
)∈ CS3
CS3 · sλ1 CS3 · sλ2 CS3 · sλ3C∑
σ∈S3σ Csλ2+Cx C
∑σ∈S3
sgn(σ)σ

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Constructing the Specht Modules of S3λ1 = (3) λ2 = (2, 1) λ3 = (1, 1, 1)
1 2 31 23
123
Rλ1 = S3
Cλ1 = (1)Rλ2 = (1), (1 2)Cλ3 = (1), (1 3)
Rλ3 = (1)Cλ3 = S3
Young symmetrizers
sλi =
( ∑σ∈Rλi
σ
)( ∑σ∈Cλi
sign(σ)σ
)∈ CS3
CS3 · sλ1 CS3 · sλ2 CS3 · sλ3C∑
σ∈S3σ Csλ2+Cx C
∑σ∈S3
sgn(σ)σ

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach
Theorem
When λ ranges over all distinct partitions of n, CSn · sλ is a full
set of non-isomorphic simple CSn-modules.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Classic Approach

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
Theorem
Let V be a simple CSn-module.
The restrictionV |Sn−1 is multiplicity-free.
n = 1
n = 2
n = 3
n = 4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Dierent Approach
V
GZ-basis
weights
contents
Inductive Family
Coxeter Groups

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Dierent Approach
V
GZ-basis
weights
contents
Inductive Family
Coxeter Groups

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
ρ : S4 → GL(V )
where for all σ ∈ S4
ρ(σ)(x1, x2, x3, x4) = (xσ−1(1), xσ−1(2), xσ−1(3), xσ−1(4)).
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
ρ is an irreducible representation of S4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
ρ : S4 → GL(V )
where for all σ ∈ S4
ρ(σ)(x1, x2, x3, x4) = (xσ−1(1), xσ−1(2), xσ−1(3), xσ−1(4)).
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
ρ is an irreducible representation of S4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
ρ : S4 → GL(V )
where for all σ ∈ S4
ρ(σ)(x1, x2, x3, x4) = (xσ−1(1), xσ−1(2), xσ−1(3), xσ−1(4)).
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
ρ is an irreducible representation of S4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
ρ : S4 → GL(V )
where for all σ ∈ S4
ρ(σ)(x1, x2, x3, x4) = (xσ−1(1), xσ−1(2), xσ−1(3), xσ−1(4)).
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
ρ is an irreducible representation of S4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
ρ : S4 → GL(V )
where for all σ ∈ S4
ρ(σ)(x1, x2, x3, x4) = (xσ−1(1), xσ−1(2), xσ−1(3), xσ−1(4)).
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
ρ is an irreducible representation of S4

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4S3S2S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4
S3S2S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4S3
S2S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4S3S2
S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4S3S2S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
S4S3S2S1
u v w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
n = 1
n = 2
n = 3
n = 4
u, v ,w
u v ,w
vu w
vu w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
n = 1
n = 2
n = 3
n = 4u, v ,w
u v ,w
vu w
vu w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
n = 1
n = 2
n = 3
n = 4u, v ,w
u v ,w
vu w
vu w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
n = 1
n = 2
n = 3
n = 4u, v ,w
u v ,w
vu w
vu w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Branching Graph
n = 1
n = 2
n = 3
n = 4u, v ,w
u v ,w
vu w
vu w

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Proposition
All simple CSn-module V has a canonical decomposition
V =⊕T
V T
indexed by all possible chains
T = λ1 . . . λn
where λi ∈ S∧n , V ∈ λn and all V T are simple S1-modules.
Gelfand-Zetlin Basis
For each T we can choose a vector vT form each V T obtaining a
basis vT of V ,which we call Gelfand-Zetlin basis.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Proposition
All simple CSn-module V has a canonical decomposition
V =⊕T
V T
indexed by all possible chains
T = λ1 . . . λn
where λi ∈ S∧n , V ∈ λn and all V T are simple S1-modules.
Gelfand-Zetlin Basis
For each T we can choose a vector vT form each V T obtaining a
basis vT of V ,which we call Gelfand-Zetlin basis.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
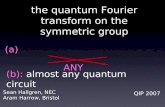
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V = <(1, 1, 1,−3)>⊕<(1, 1,−2, 0)>⊕<(1,−1, 0, 0)>.
Let u = (1, 1, 1,−3), v = (1, 1,−2, 0), w = (1,−1, 0, 0) and x
the basis GZ = u, v ,w for V .
(1) (1 2) (2 3) (3 4)1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 −1
1 0 0
0 −12
12
0 32
12
−13
23 0
43 0 0
0 13 1
.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V = <(1, 1, 1,−3)>⊕<(1, 1,−2, 0)>⊕<(1,−1, 0, 0)>.
Let u = (1, 1, 1,−3), v = (1, 1,−2, 0), w = (1,−1, 0, 0) and x
the basis GZ = u, v ,w for V .
(1) (1 2) (2 3) (3 4)1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 −1
1 0 0
0 −12
12
0 32
12
−13
23 0
43 0 0
0 13 1
.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
S4Permutation matrices
4× 4
V = (x1, x2, x3, x4) ∈ C4 : x1 + x2 + x3 + x4 = 0
V
CS4J1
J2
J3
J4 u v w
J1 = 0
J2 = (1 2)J3 = (1 3) + (2 3)J4 = (1 4) + (2 4) + (3 4)Jucys-Murphy elements

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
0 (1 2) (1 3) + (2 3) (1 4) + (2 4) + (3 4)0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 −1
2 0 0
0 −1 0
0 0 1
−1 0 0
0 2 0
0 0 2
.γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)
weights

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example: The standard representation of S4
0 (1 2) (1 3) + (2 3) (1 4) + (2 4) + (3 4)0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 −1
2 0 0
0 −1 0
0 0 1
−1 0 0
0 2 0
0 0 2
.γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)
weights

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Theorem
B ' Y

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
n = 1
n = 2
n = 3
n = 4
n = 5

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → →
!1 2 34
→ → → !1 2 43
→ → → !1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → → !1 2 34
→ → → !1 2 43
→ → → !1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → → !1 2 34
→ → →
!1 2 43
→ → → !1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → → !1 2 34
→ → → !1 2 43
→ → → !1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → → !1 2 34
→ → → !1 2 43
→ → →
!1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
→ → → !1 2 34
→ → → !1 2 43
→ → → !1 3 42

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
Consider
Q1 = 1 2 34
, Q2 = 1 2 43
and Q3 = 1 3 42
.
We have:
δ(Q1) = (0, 1, 2,−1)
δ(Q2) = (0, 1,−1, 2)
δ(Q3) = (0,−1, 1, 2)
contents = weights
γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
Consider
Q1 = 1 2 34
, Q2 = 1 2 43
and Q3 = 1 3 42
.
We have:
δ(Q1) = (0, 1, 2,−1)
δ(Q2) = (0, 1,−1, 2)
δ(Q3) = (0,−1, 1, 2)
contents = weights
γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
Consider
Q1 = 1 2 34
, Q2 = 1 2 43
and Q3 = 1 3 42
.
We have:
δ(Q1) = (0, 1, 2,−1)
δ(Q2) = (0, 1,−1, 2)
δ(Q3) = (0,−1, 1, 2)
contents
= weights
γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
Example
Consider
Q1 = 1 2 34
, Q2 = 1 2 43
and Q3 = 1 3 42
.
We have:
δ(Q1) = (0, 1, 2,−1)
δ(Q2) = (0, 1,−1, 2)
δ(Q3) = (0,−1, 1, 2)
contents = weights
γ(u) = (0, 1, 2,−1)
γ(v) = (0, 1,−1, 2)
γ(w) = (0,−1, 1, 2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
The Spectrum and the Resume
Theorem
Let Ω be the set of all elements
x = (x1, . . . , xn) ∈ Cn
which verify the following properties:
1. x1 = 0;
2. xi − 1, xi + 1 ∩ x1, . . . , xi−1 6= ∅, ∀i ∈ 2, . . . , n;3. If xi = xj = a, for some i < j , then
a−1, a + 1 ⊆ xi+1, . . . , xj−1.
We have
Ω = En = Rn.

Representation Theories of the Symmetric Group and the Rook Monoid
The Symmetric Group
Dierent Approach
The Spectrum and the Resume
Theorem
Let Ω be the set of all elements
x = (x1, . . . , xn) ∈ Cn
which verify the following properties:
1. x1 = 0;
2. xi − 1, xi + 1 ∩ x1, . . . , xi−1 6= ∅, ∀i ∈ 2, . . . , n;3. If xi = xj = a, for some i < j , then
a−1, a + 1 ⊆ xi+1, . . . , xj−1.
We have
Ω = En = Rn.

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
Finite Semigroups Representation Theory
S Finite Semigroup
J1 J2 . . . JsU(S)
Regular J -classes
GJ1 GJ2. . . GJs Maximal Subgroups
Irreducible Representations

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
Finite Semigroups Representation Theory
S Finite Semigroup
J1 J2 . . . JsU(S)
Regular J -classes
GJ1 GJ2. . . GJs Maximal Subgroups
Irreducible Representations

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
Finite Semigroups Representation Theory
S Finite Semigroup
J1 J2 . . . JsU(S)
Regular J -classes
GJ1 GJ2. . . GJs Maximal Subgroups
Irreducible Representations

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
Finite Semigroups Representation Theory
S Finite Semigroup
J1 J2 . . . JsU(S)
Regular J -classes
GJ1 GJ2. . . GJs Maximal Subgroups
Irreducible Representations

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
Theorem[Cliord,Munn,Ponizovskii]
The number of irreducible representations of S (up to isomorphism)
is equal to the number of irreducible representations of its maximal
subgroups GJ , with J ∈ U(S).

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
The Rook Monoid
0 0 0 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 1 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
[2 1] [2 1 3][5 4] (1)(2)(3)(4)(5)

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
The Rook Monoid
0 0 0 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 1 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
[2 1] [2 1 3][5 4] (1)(2)(3)(4)(5)

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Introduction
The Rook Monoid
0 0 0 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 1 0 0
1 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 1 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
1 2 3 4 5
[2 1] [2 1 3][5 4] (1)(2)(3)(4)(5)

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
1 2 3
1 2 3
01 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1) [1 2] [1 3] [2 1] (2) [2 3] [3 1] [3 2] (3)1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1)(2) (1)[2 3] (1)[3 2] (1)(3) (1 2) [1 2 3] [3 1 2] [1 2](3) [2 1 3]1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(2)[1 3] (1 3) [1 3 2] [3 2 1] (3)[2 1] (2)[3 1] (2)(3) (1)[2 3] (2 3)1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1)(2)(3) (1)(2 3) (1 2)(3) (1 2 3) (1 3 2) (1 3)(2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
The special case of the Rook Monoid
n.o of isoclasses of Irr. Rep. = sum of the n.o of isoclasses of Irr.
Rep of its maximal subgroup GJ
The list of the maximal subgroups GJ of In will be isomorphic to
S0,S1, . . . ,Sn.
|IrrRep(In)| =n∑
k=0
|IrrRep(Sk)|

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
The special case of the Rook Monoid
n.o of isoclasses of Irr. Rep. = sum of the n.o of isoclasses of Irr.
Rep of its maximal subgroup GJ
The list of the maximal subgroups GJ of In will be isomorphic to
S0,S1, . . . ,Sn.
|IrrRep(In)| =n∑
k=0
|IrrRep(Sk)|

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
The special case of the Rook Monoid
n.o of isoclasses of Irr. Rep. = sum of the n.o of isoclasses of Irr.
Rep of its maximal subgroup GJ
The list of the maximal subgroups GJ of In will be isomorphic to
S0,S1, . . . ,Sn.
|IrrRep(In)| =n∑
k=0
|IrrRep(Sk)|

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
Isoclasses of Irr. Rep. of In
∅ n = 0
∅ n = 1
∅ n = 2
∅ n = 3

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
Isoclasses of Irr. Rep. of In
∅ n = 0
∅ n = 1
∅ n = 2
∅ n = 3

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
Isoclasses of Irr. Rep. of In
∅ n = 0
∅ n = 1
∅ n = 2
∅ n = 3

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Classical Approach
Isoclasses of Irr. Rep. of In
∅ n = 0
∅ n = 1
∅ n = 2
∅ n = 3

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Dierent Approach
1 2 3
1 2 3
01 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1) [1 2] [1 3] [2 1] (2) [2 3] [3 1] [3 2] (3)1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1)(2) (1)[2 3] (1)[3 2] (1)(3) (1 2) [1 2 3] [3 1 2] [1 2](3) [2 1 3]1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(2)[1 3] (1 3) [1 3 2] [3 2 1] (3)[2 1] (2)[3 1] (2)(3) (1)[2 3] (2 3)1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
(1)(2)(3) (1)(2 3) (1 2)(3) (1 2 3) (1 3 2) (1 3)(2)

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Dierent Approach
rank 0 rank 1 rank 2 rank 31 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
ε∅ ε1 ε2 ε3 ε1,2 ε1,3 ε2,3 ε1,2,3
η0 = ε∅
η1 = −3 ε∅ + ε1 + ε2 + ε3
η2 = 3 ε∅ − 2 ε1 − 2 ε2 − 2 ε3 + ε1,2 + ε1,3 + ε2,3
η3 = −ε∅ + ε1 + ε2 + ε3 − ε1,2 − ε1,3 − ε2,3 + ε1,2,3
In this case:
CI3 ' M1(CS0)⊕M3(CS1)⊕M3(CS2)⊕M1(CS3)
CIn ' CInη0 ⊕ . . .⊕ CInηn ' M(n0)(CS0)⊕ . . .⊕M(nn)
(CSn)
∴ CIn is semisimple.

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Dierent Approach
rank 0 rank 1 rank 2 rank 31 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
ε∅ ε1 ε2 ε3 ε1,2 ε1,3 ε2,3 ε1,2,3
η0 = ε∅
η1 = −3 ε∅ + ε1 + ε2 + ε3
η2 = 3 ε∅ − 2 ε1 − 2 ε2 − 2 ε3 + ε1,2 + ε1,3 + ε2,3
η3 = −ε∅ + ε1 + ε2 + ε3 − ε1,2 − ε1,3 − ε2,3 + ε1,2,3
In this case:
CI3 ' M1(CS0)⊕M3(CS1)⊕M3(CS2)⊕M1(CS3)
CIn ' CInη0 ⊕ . . .⊕ CInηn ' M(n0)(CS0)⊕ . . .⊕M(nn)
(CSn)
∴ CIn is semisimple.

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Dierent Approach
rank 0 rank 1 rank 2 rank 31 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
ε∅ ε1 ε2 ε3 ε1,2 ε1,3 ε2,3 ε1,2,3
η0 = ε∅
η1 = −3 ε∅ + ε1 + ε2 + ε3
η2 = 3 ε∅ − 2 ε1 − 2 ε2 − 2 ε3 + ε1,2 + ε1,3 + ε2,3
η3 = −ε∅ + ε1 + ε2 + ε3 − ε1,2 − ε1,3 − ε2,3 + ε1,2,3
In this case:
CI3 ' M1(CS0)⊕M3(CS1)⊕M3(CS2)⊕M1(CS3)
CIn ' CInη0 ⊕ . . .⊕ CInηn ' M(n0)(CS0)⊕ . . .⊕M(nn)
(CSn)
∴ CIn is semisimple.

Representation Theories of the Symmetric Group and the Rook Monoid
The Rook Monoid
Dierent Approach
rank 0 rank 1 rank 2 rank 31 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
ε∅ ε1 ε2 ε3 ε1,2 ε1,3 ε2,3 ε1,2,3
η0 = ε∅
η1 = −3 ε∅ + ε1 + ε2 + ε3
η2 = 3 ε∅ − 2 ε1 − 2 ε2 − 2 ε3 + ε1,2 + ε1,3 + ε2,3
η3 = −ε∅ + ε1 + ε2 + ε3 − ε1,2 − ε1,3 − ε2,3 + ε1,2,3
In this case:
CI3 ' M1(CS0)⊕M3(CS1)⊕M3(CS2)⊕M1(CS3)
CIn ' CInη0 ⊕ . . .⊕ CInηn ' M(n0)(CS0)⊕ . . .⊕M(nn)
(CSn)
∴ CIn is semisimple.

Representation Theories of the Symmetric Group and the Rook Monoid
References
Main References
I Alexander Kleshchev. Linear and Projective Representations of Symmetric
Groups. Cambridge University Press. 2005.
I Andrei Okounkov, Anatoly Vershik. A New Approach to Repesentation
Theory of Symmetric Groups. Selecta Mathematica, New Series, vol. 2,
No. 4,581-605. 1996.
I Louis Solomon. Representations of the rook monoid. Journal of Algebra
256, 309-342. 2002.
I W.D.Munn. The characters of the symmetric inverse semigroup. Proc.
Cambridge Philos. Soc. 1957.

Representation Theories of the Symmetric Group and the Rook Monoid
References
Other References
I James Alexander "Sandy" Green. Polynomial representations of GLn.
Springer. Second edition. 2006.
I Benjamin Steinberg. The Representation Theory of Finite Monoids,
preliminary version. Springer, 2016.
I C. Curtis, I. Reiner. Representation Theory of Finite Groups and
Associative Algebras. American Mathematical Society. 1962.
I William Fulton and Joe Harris. Representation theory, volume 129 of
Graduate Texts in Mathematics. Springer-Verlag, New York, 1991. A rst
course, Readings in Mathematics.
Top Related