







Languages
Pages
Legal

NN-based model structures for identification and control
of nonlinear systems.Non-fully connected neural
networksEduard Petlenkov,TTÜ automaatikainstituudi [email protected]

Model Based Control
Model structure independent Model structure dependent
Neural Networks (NN) based Models
•Choosing proper structure of the model may increase accuracy of the model•Adaptivity by using network’s ability to learn
Model may become•Nonanalytical or hardly analytical•Overparameterized
•Easy realization of the model’s structure relevant to the control algorithm •Adaptivity by using network’s ability to learn•Analytical models (for example, state-space representation of nonlinear models)
•Restricted class of systems to which the control technique can be applied
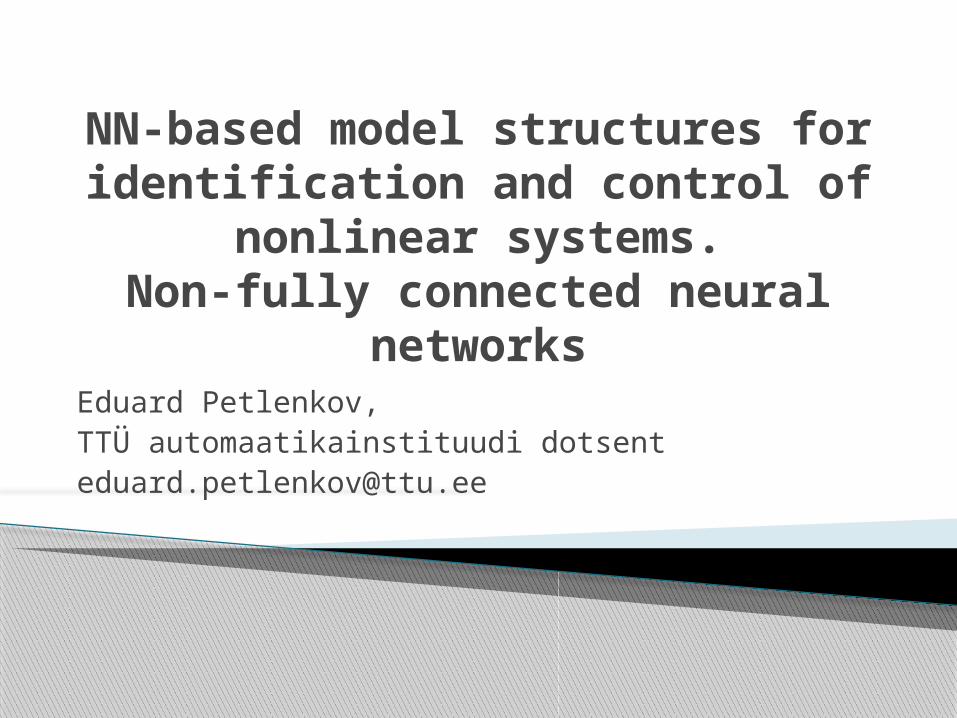
Linear dynamic system with static actuator nonlinearity
H(s), H(z)
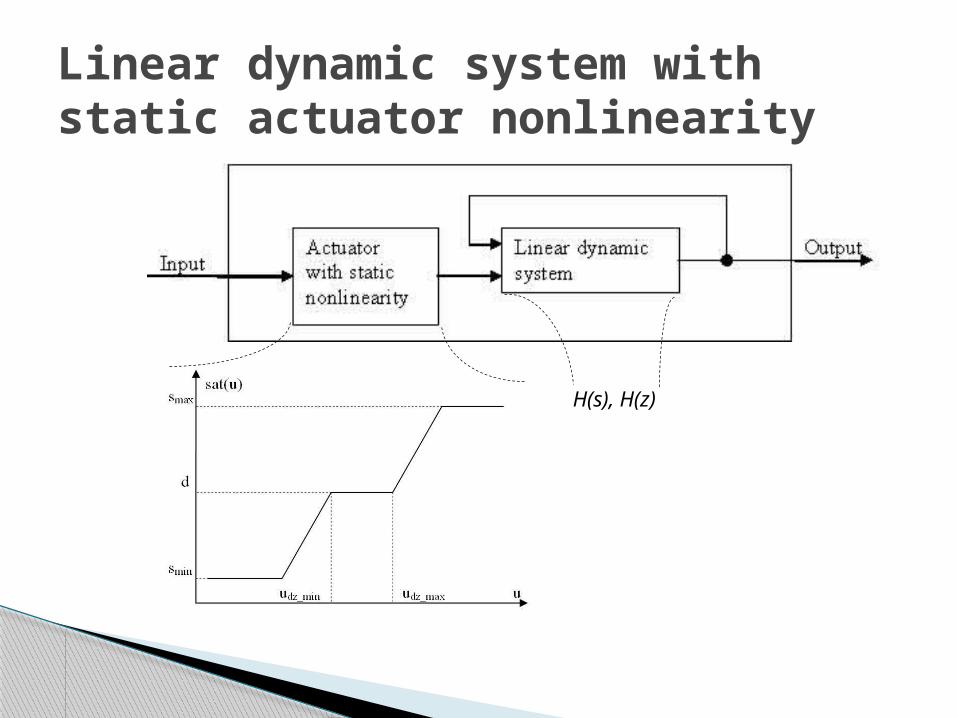
Neural Network Structure for dynamic systems with static actuator nonlinearity
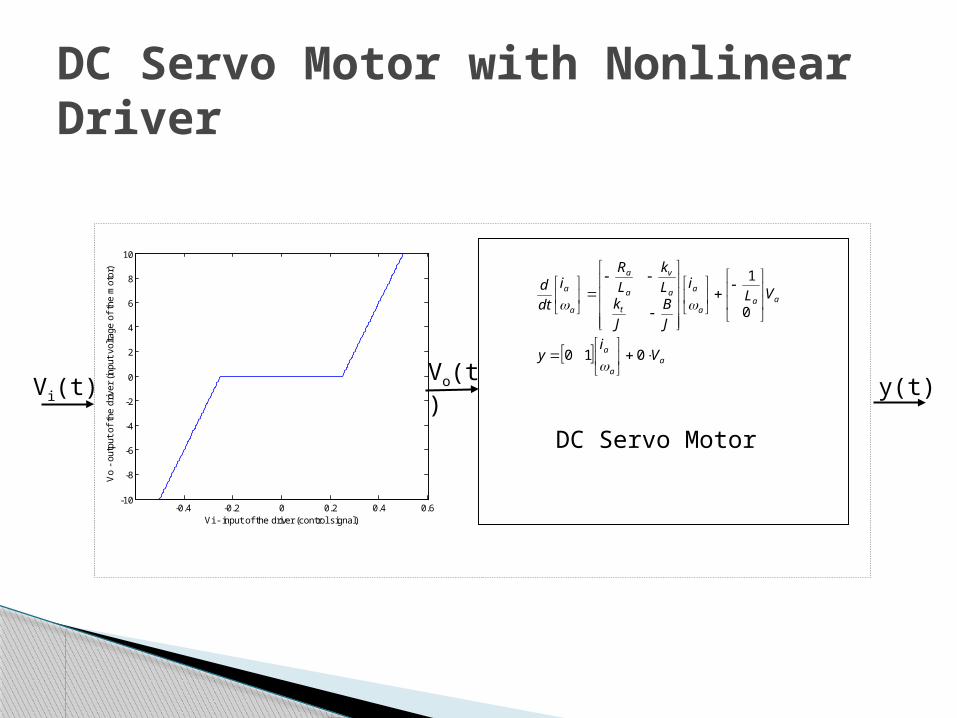
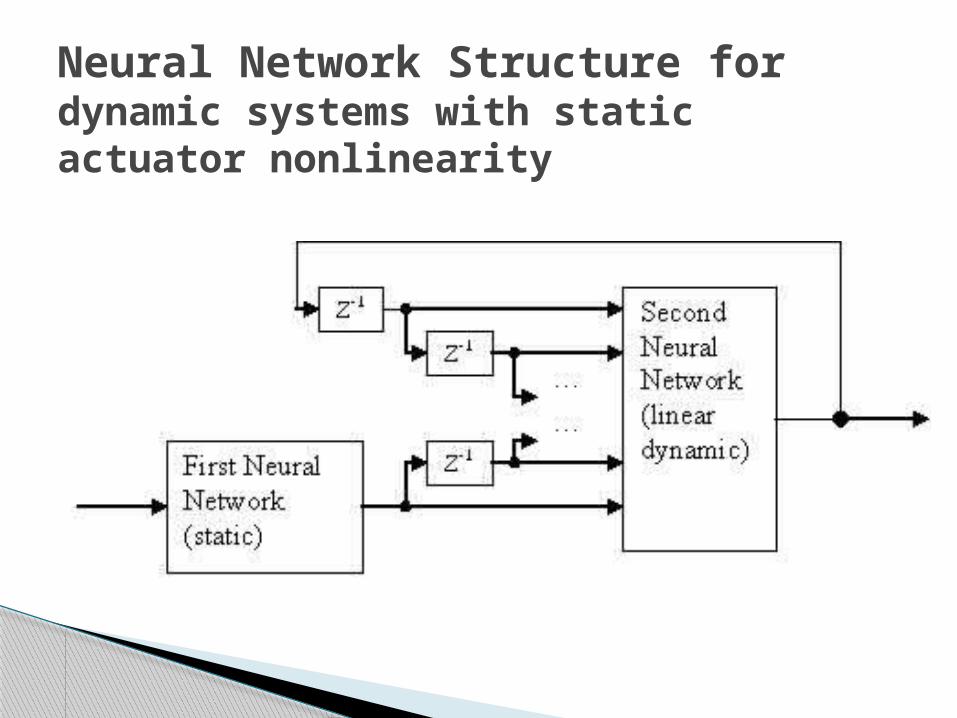
DC Servo Motor with Nonlinear Driver
-0.4 -0.2 0 0.2 0.4 0.6-10
-8
-6
-4
-2
0
2
4
6
8
10
Vi - input of the driver (control signal)
Vo
- ou
tput
of
the
driv
er (
inpu
t vo
ltage
of
the
mot
or)
aa
a
aaa
a
t
a
v
a
a
a
a
Vi
y
VLi
J
B
J
kL
k
L
Ri
dt
d
010
0
1
Vi(t)Vo(t) y(t)
DC Servo Motor
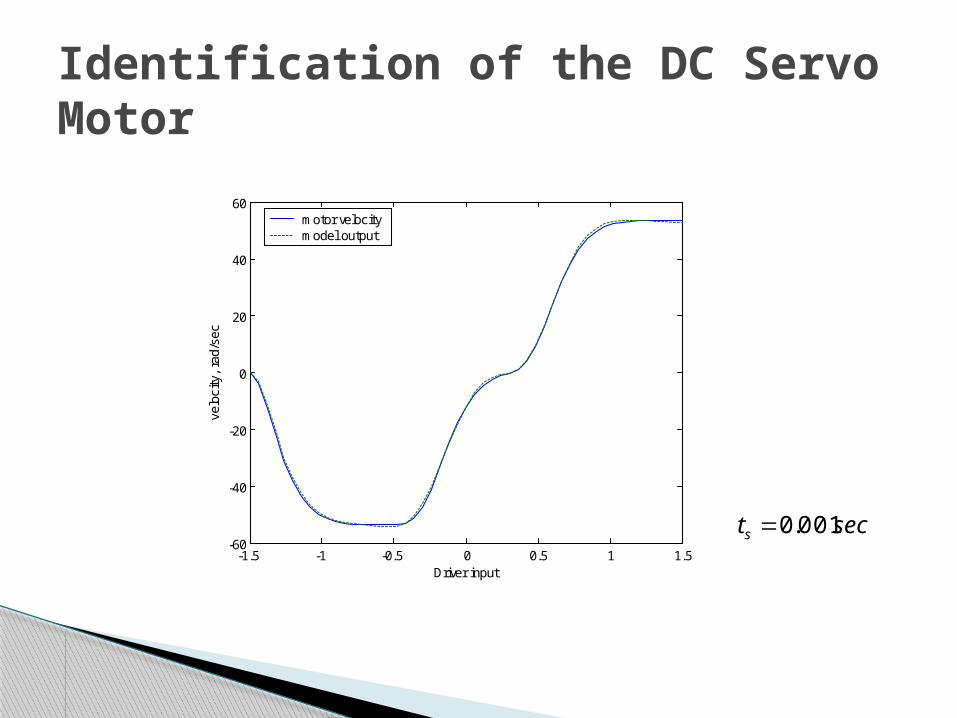
Identification of the DC Servo Motor
-1.5 -1 -0.5 0 0.5 1 1.5-60
-40
-20
0
20
40
60
Driver input
velo
city
, ra
d/se
cmotor velocitymodel output
sects 001.0
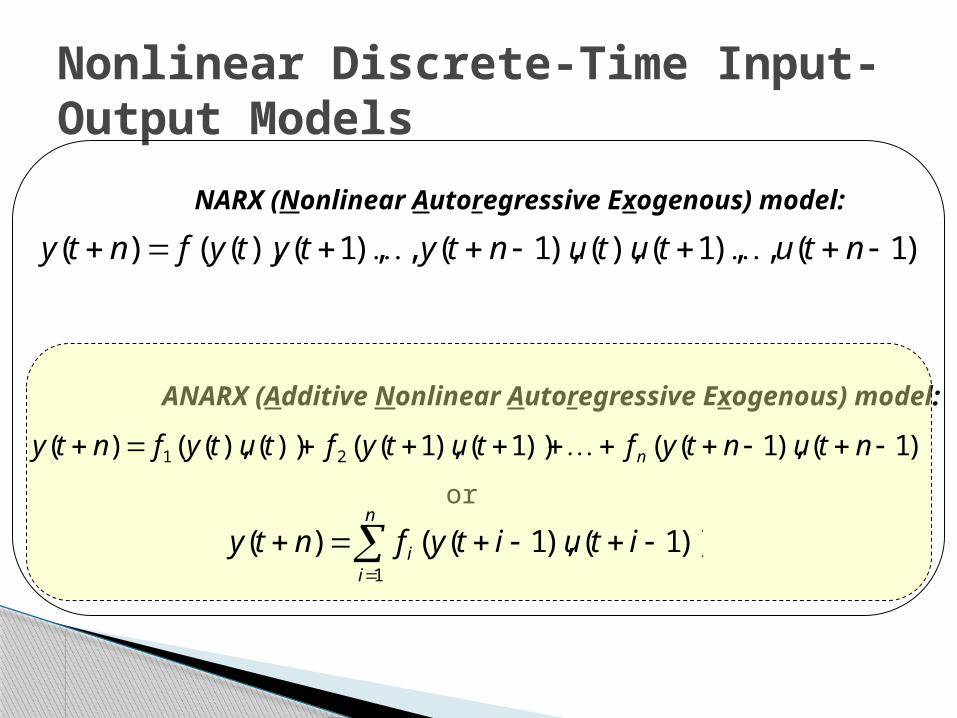
Nonlinear Discrete-Time Input-Output Models
))1(,),1(),(),1(,),1(),(()( ntututuntytytyfnty
NARX (Nonlinear Autoregressive Exogenous) model:
))1(),1(())1(),1(())(),(()( 21 ntuntyftutyftutyfnty n
ANARX (Additive Nonlinear Autoregressive Exogenous) model:
or
n
ii ituityfnty
1
))1(),1(()(

Advantages of ANARX Structure over NARX
• Easy to change the order of the model
• Always realizable in the classical state-space form
n
ii ituityfnty
1
))1(),1(()(
)()(
))(),(()(
))(),(()()(
))(),(()()(
))(),(()()(
1
1
111
1232
1121
txty
tutxftx
tutxftxtx
tutxftxtx
tutxftxtx
nn
nnn
• Linearizable by dynamic feedback

Neural Network based ANARX (NN-ANARX) Model
n-th sub-layer
1st sub-layer
n
i
Tiii ituityWCnty
1
)1(),1()(
i i
is a sigmoid functioni

ANARX Model based Dynamic Output Feedback Linearization Algorithm
)(),()()1(
)(),()()1(
)(),()()1(
)()(),(
1
112
221
11
tutyftvt
tutyftt
tutyftt
ttutyfF
nn
nnn
NN
Tnnnn
Tnnnnn
T
T
tutyWCtvt
tutyWCtt
tutyWCtt
ttutyWCF
)(),()()1(
)(),()()1(
)(),()()1(
)()(),(
1
11112
22221
1111
n
ii ituityfnty
1
))1(),1(()(
ANARX model NN-ANARX model
n
i
Tiii ituityWCnty
1
)1(),1()(
))(),(()( 11 ttyFtu

NN-ANARX Model based Control of Nonlinear Systems
y(t)u(t)
Reference signal v(t)
Nonlinear SystemDynamic Output
Feedback Linearization
NN-based ANARX model
Parameters (W1, …, Wn, C1, …, Cn)
* HSA=History-Stack Adaptation
Controller
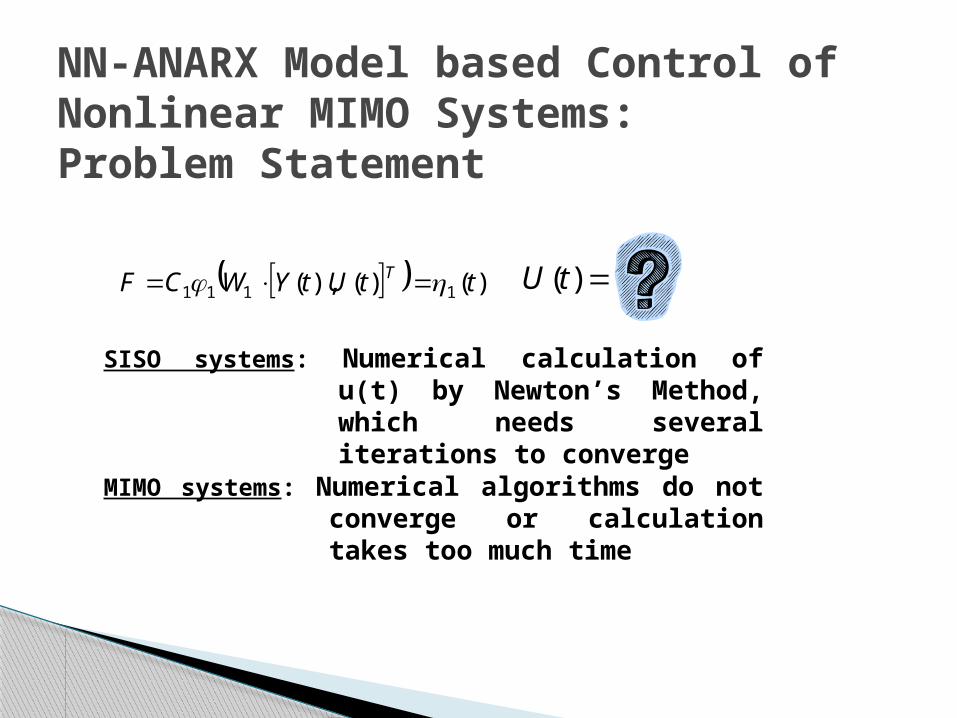
NN-ANARX Model based Control of Nonlinear MIMO Systems:Problem Statement
)()(),( 1111 ttUtYWCF T )(tU
SISO systems: Numerical calculation of u(t) by Newton’s Method, which needs several iterations to converge
MIMO systems: Numerical algorithms do not converge or calculation takes too much time

NN-based Simplified ANARX Model (NN-SANARX)
n-th sub-layer(nonlinear)
n
iiii itZWCtZWCty
211 )()1()(
1tZ
ntZ

NN-SANARX Model based Control (1) )(,),(,,,,, 11111111 tttututytyWC m
Trm
TrT
m tutuWtytyW ,,,, 112111
=
1111 WCT 1212 WCT Let’s define:
)(,),(,,,,, 1111111 tttututytyWC mT
rm (*)
mmT 1rmT 2
)(,),(,,,, 1111211 tttutuTtytyT mT
rT
m
where
If m=r and T2 is not singular or close to singular then
Tm
Tm
Tr tytyTttTtutu ,,,,,, 11,11,1
121

NN-SANARX Model based Control (2)
Tm
Tm
Tr tytyTttTtutu ,,,,,, 11,11,1
121
Trmnnn
mT
mnn
TTrmnnn
Tmnn
Tmnn
Trm
Tm
Tm
tututytyWC
tvtvtt
tututytyWC
tttt
tututytyWC
tttt
,,,,,
,,1,,1
,,,,,
,,1,,1
,,,,,
,,1,,1
11
1,11,1
11111
,11,1,21,2
11222
,21,2,11,1
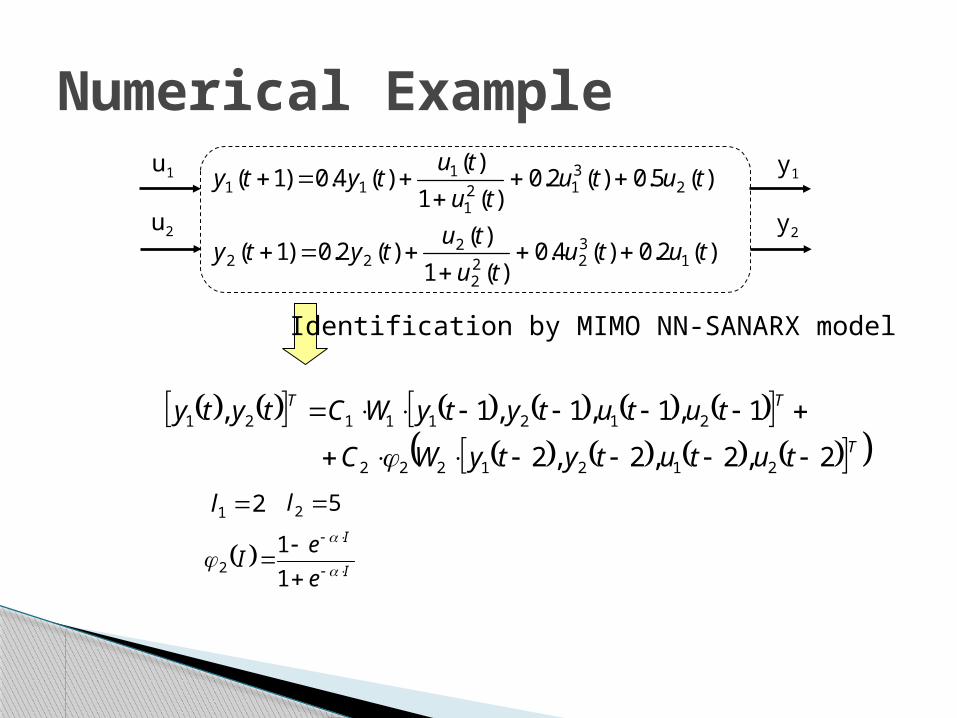
Numerical Example
)(2.0)(4.0)(1
)()(2.0)1(
)(5.0)(2.0)(1
)()(4.0)1(
1322
2
222
2312
1
111
tututu
tutyty
tututu
tutyty
Identification by MIMO NN-SANARX model
T
TT
tututytyWC
tututytyWCtyty
2,2,2,2
1,1,1,1,
2121222
21211121
21 l 52 l
I
I
e
eI
1
12
u1
u2
y1
y2

Numerical Example: NN-based SANARX model
6805.07675.02253.02669.1
7308.03075.02909.19239.01W
5827.07948.0
8987.01414.0 1C
1096.0 0513.0 1615.0 2699.0
1054.0 0501.0 1549.0 2637.0
0373.00094.00167.0 0259.0
0473.00553.02258.0 1837.0
0424.00046.00214.0 0358.0
2W
9052.258546.271403.226542.19867.1
8476.63793.79394.1071466.06868.842C
1.02.0sin4.01 ttuv
ttuv 1.0sin8.02
41036.1 MSE
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
1.5
Time Steps
Outp
ut
first output of the systemsecond output of the systemfirst output of the modelsecond output of the model
y1
y2

Numerical Example: Control (1/2)
6805.07675.02253.02669.1
7308.03075.02909.19239.01W
1573.10039.0
0161.02720.11111 CWT
9773.02028.0
5061.07341.01122 CWT
1940.13299.0
8231.05896.112T
2253.02669.1
2909.19239.011W
6805.07675.0
730.03075.012W
6.0det 2 T 22 Trank
TTT
TTT
tututytyWCtvtvtt
tytyTttTtutu
2121222212,11,1
2112,11,11
221
,,,,1,1
,,,
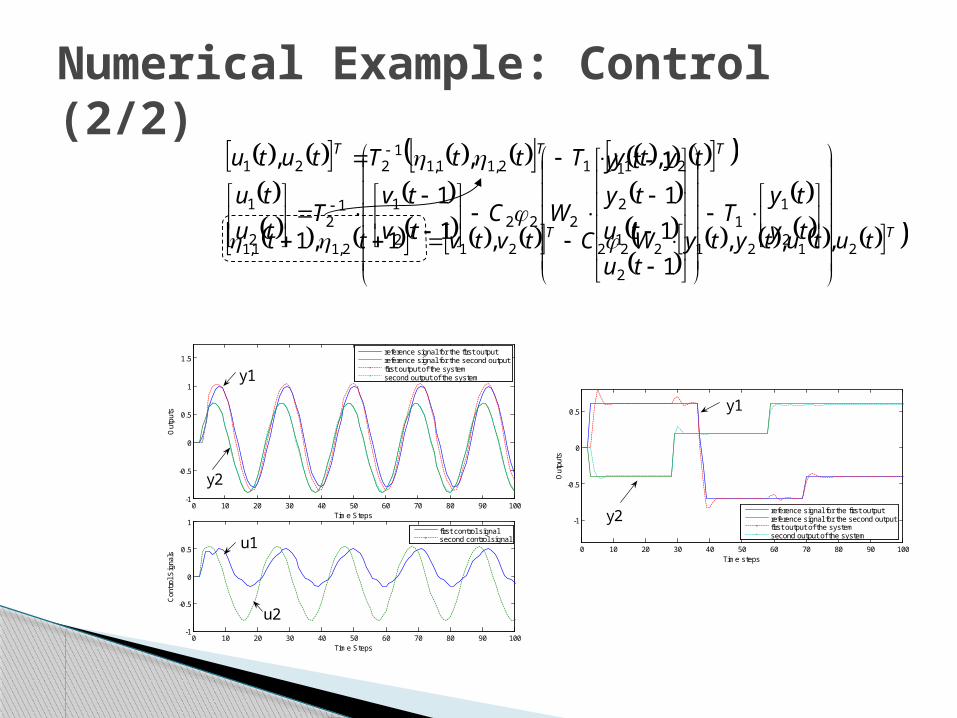
Numerical Example: Control (2/2)
ty
tyT
tu
tu
ty
ty
WCtv
tvT
tu
tu
2
11
2
1
2
1
2222
112
2
1
1
1
1
1
1
1
TTT tytyTttTtutu 2112,11,11
221 ,,,
TTT tututytyWCtvtvtt 2121222212,11,1 ,,,,1,1
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
1.5
Time Steps
Out
puts
reference signal for the first outputreference signal for the second outputfirst output of the systemsecond output of the systemy1
y2
0 10 20 30 40 50 60 70 80 90 100-1
-0.5
0
0.5
1
Time Steps
Con
trol
Sig
nals
first control signalsecond control signalu1
u2
0 10 20 30 40 50 60 70 80 90 100
-1
-0.5
0
0.5
Time stepsO
utpu
ts
reference signal for the first outputreference signal for the second outputfirst output of the systemsecond output of the system
y1
y2

Model Reference Control
u(t)
y(t)
v(t)
Parameters(W1, …, Wn, C1, …, Cn)
Nonlinear system
NN-based ANARX model
Dynamic Output Feedback Linearization
Algorithm
Parameters(a1, …, an, b1, …, bn)
reference model

Reference model zVzHzY m
ntvbtvbntyatyaty nn 11 11
nn
nnnnn
nn
mazazazaz
bzbzbzbzH
12
21
1
12
21
1
Dynamic output feedback linearization of ANARX model
tyatutyftvbt
tya
tutyftvbtt
tyatutyftvbtt
ttvbtyatutyfF
nnnn
n
nnnn
)(),()1(
)(),()()1(
)(),()()1(
)()(),(
1
1
1112
22221
1111

NN-ANARX Model based Reference Model Control
NN-ANARX model
n
i
Tiii ituityWCnty
1
)1(),1()(
Dynamic output feedback linearization of NN-ANARX model
)()(),( 111111 ttvbtyatutyWCF T
tyaWCtvbt
WC
tyatvbtt
WC
tyatvbtt
nT
nnnnn
Tnnn
nnnn
T
tuty
tuty
tuty
)(),(
)(),(
)(),(
)1(
)()1(
)()1(
1
111
1112
222
2221

Numerical Example: JCSTR model
Input-Output equation:
)1()(5611.0)1()1(592.0
)1(3921.0)1()(014.1
)1(6407.0)1(4801.0
)(231.0)1(7653.0)2(
2
2
tutytuty
tytyty
tytu
tytyty

Example: Control Task
72.01.0150
1975
19
8.09.0
5.0
75
192
zz
z
zz
zzH
Linear second order discrete time reference model with poles p1=-0.9, p2=0.8, zero n1=-0.5, steady-state gain Kss=1
It defines the desired behavior of the closed loop system (=control system)
Parameters of the reference model for control algorithm are as follows:
72.02 a1.01 a150
192 b75
191 b

Example: NN-based modeland control
First sub-layer is linear
11 WCD
TT tutyWCtutyDty 2,21,1)( 222
Here
)(111)(),( ttvbtyaD Ttuty We know that
TtutyWCtyatvbt )(),(222221 )1(
Thus,
and ][ 21 ddD
tyatydtvbWCtyatvbd
tu Ttuty 11122222
2
)1(),1(1 11

Example: NN-based modeland control
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
Time Steps
Outp
uts
reference model output
system output
reference signal
Top Related