






Languages
Pages
Legal

Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
1/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Design of Electrical Rotating Machines usingInterval Branch and Bound based Algorithms
Frederic Messine
ENSEEIHT-IRIT, Team APO collaboration with GREM3-LAPLACE,Toulouse
October 2007
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
2/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Collaborations with the GREM3 Team(LAPLACE-ENSEEIHT)
I Bertrand Nogarede, Professor : Director of GREM3,collaboration since 1995 (2 PhD-thesis).
I Yvan Lefevre, CR, HDR : collaboration since 2002, (1PhD student).
I Francois Pigache, MC : collaboration since 2005.
I Jean-Francois Rouchon, MC : specialist in mechanic,
I Carole Henaux, MC : specialist in electrotechnic,
I Eric Duhayon, MC : specialist of materials,
I Dominique Harribey, IR.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
3/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Outline
Design of Actuators: an Inverse ProblemDirect and Inverse Problem of Design and FormulationsMathematical Formulations =⇒ Optimization ProblemsClassification and Principle of Optimization Methods
Interval Branch and Bound AlgorithmsPrinciple of Branch and Bound AlgorithmsInterval AnalysisMixed and Constrained Problems
Some Designs of Electrical Rotating MachinesRotating Machines with Magnetic EffectsCombinatorial Models for Electrical MachinesNumerical Examples of Electrical MachinesDesign with a Black-Box Constraint
Some Realizations and Conclusion
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
3/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Outline
Design of Actuators: an Inverse ProblemDirect and Inverse Problem of Design and FormulationsMathematical Formulations =⇒ Optimization ProblemsClassification and Principle of Optimization Methods
Interval Branch and Bound AlgorithmsPrinciple of Branch and Bound AlgorithmsInterval AnalysisMixed and Constrained Problems
Some Designs of Electrical Rotating MachinesRotating Machines with Magnetic EffectsCombinatorial Models for Electrical MachinesNumerical Examples of Electrical MachinesDesign with a Black-Box Constraint
Some Realizations and Conclusion
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
3/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Outline
Design of Actuators: an Inverse ProblemDirect and Inverse Problem of Design and FormulationsMathematical Formulations =⇒ Optimization ProblemsClassification and Principle of Optimization Methods
Interval Branch and Bound AlgorithmsPrinciple of Branch and Bound AlgorithmsInterval AnalysisMixed and Constrained Problems
Some Designs of Electrical Rotating MachinesRotating Machines with Magnetic EffectsCombinatorial Models for Electrical MachinesNumerical Examples of Electrical MachinesDesign with a Black-Box Constraint
Some Realizations and Conclusion
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
3/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Outline
Design of Actuators: an Inverse ProblemDirect and Inverse Problem of Design and FormulationsMathematical Formulations =⇒ Optimization ProblemsClassification and Principle of Optimization Methods
Interval Branch and Bound AlgorithmsPrinciple of Branch and Bound AlgorithmsInterval AnalysisMixed and Constrained Problems
Some Designs of Electrical Rotating MachinesRotating Machines with Magnetic EffectsCombinatorial Models for Electrical MachinesNumerical Examples of Electrical MachinesDesign with a Black-Box Constraint
Some Realizations and Conclusion
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
4/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
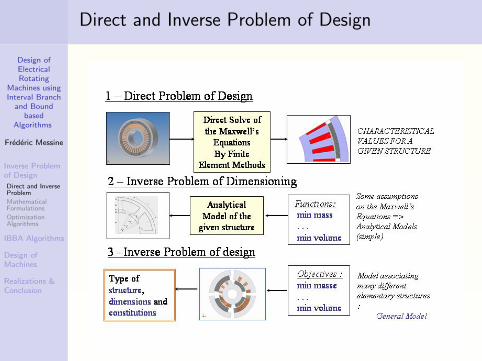
Direct and Inverse Problem of Design
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
5/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Direct and Inverse Problem of Design
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
6/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Direct and Inverse Problem of Design

Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
7/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Direct and Inverse Problem of Design
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
8/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Direct and Inverse Problem of Design
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
9/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
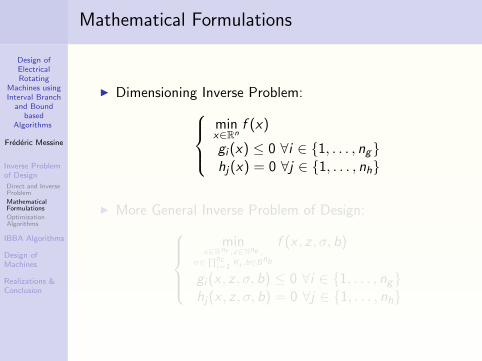
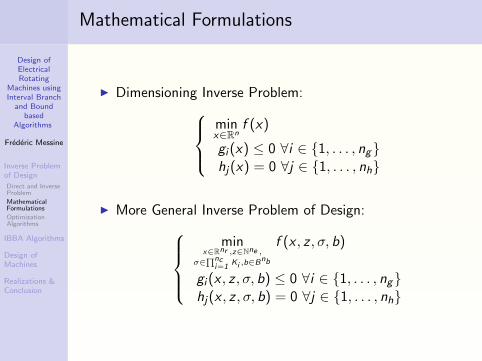
Mathematical Formulations
I Dimensioning Inverse Problem:minx∈Rn
f (x)
gi (x) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x) = 0 ∀j ∈ {1, . . . , nh}
I More General Inverse Problem of Design:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh}
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
9/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Mathematical Formulations
I Dimensioning Inverse Problem:minx∈Rn
f (x)
gi (x) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x) = 0 ∀j ∈ {1, . . . , nh}
I More General Inverse Problem of Design:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh}
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
10/ 37
Frederic Messine
Inverse Problemof Design
Direct and InverseProblem
MathematicalFormulations
OptimizationAlgorithms
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
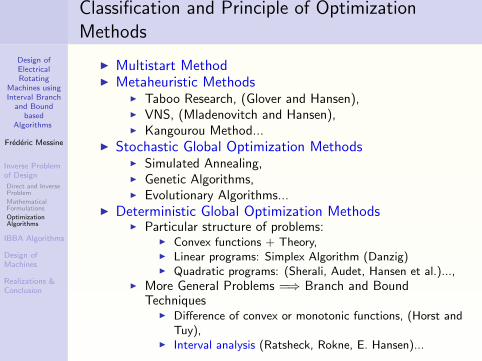
Classification and Principle of OptimizationMethods
I Multistart MethodI Metaheuristic Methods
I Taboo Research, (Glover and Hansen),I VNS, (Mladenovitch and Hansen),I Kangourou Method...
I Stochastic Global Optimization MethodsI Simulated Annealing,I Genetic Algorithms,I Evolutionary Algorithms...
I Deterministic Global Optimization MethodsI Particular structure of problems:
I Convex functions + Theory,I Linear programs: Simplex Algorithm (Danzig)I Quadratic programs: (Sherali, Audet, Hansen et al.)...,
I More General Problems =⇒ Branch and BoundTechniques
I Difference of convex or monotonic functions, (Horst andTuy),
I Interval analysis (Ratsheck, Rokne, E. Hansen)...
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
11/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
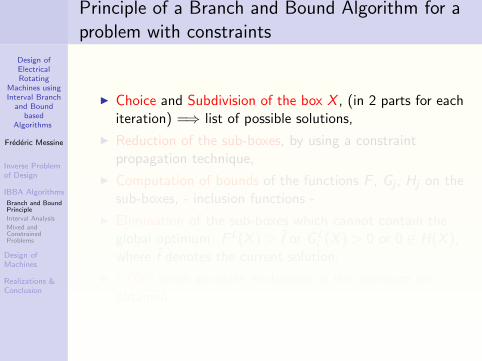
Principle of a Branch and Bound Algorithm for aproblem with constraints
I Choice and Subdivision of the box X , (in 2 parts for eachiteration) =⇒ list of possible solutions,
I Reduction of the sub-boxes, by using a constraintpropagation technique,
I Computation of bounds of the functions F , Gj , Hj on thesub-boxes, - inclusion functions -
I Elimination of the sub-boxes which cannot contain theglobal optimum: F L(X ) > f or GL
i (X ) > 0 or 0 6∈ H(X ),where f denotes the current solution,
I STOP when accurate enclosures of the optimum areobtained.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
11/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
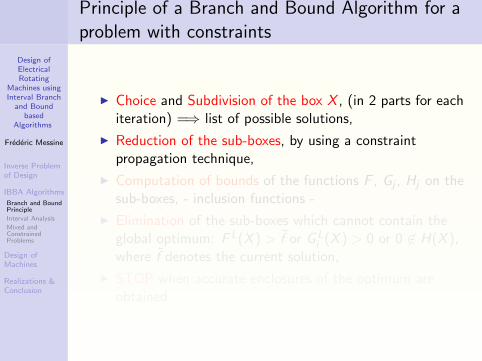
Principle of a Branch and Bound Algorithm for aproblem with constraints
I Choice and Subdivision of the box X , (in 2 parts for eachiteration) =⇒ list of possible solutions,
I Reduction of the sub-boxes, by using a constraintpropagation technique,
I Computation of bounds of the functions F , Gj , Hj on thesub-boxes, - inclusion functions -
I Elimination of the sub-boxes which cannot contain theglobal optimum: F L(X ) > f or GL
i (X ) > 0 or 0 6∈ H(X ),where f denotes the current solution,
I STOP when accurate enclosures of the optimum areobtained.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
11/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Principle of a Branch and Bound Algorithm for aproblem with constraints
I Choice and Subdivision of the box X , (in 2 parts for eachiteration) =⇒ list of possible solutions,
I Reduction of the sub-boxes, by using a constraintpropagation technique,
I Computation of bounds of the functions F , Gj , Hj on thesub-boxes, - inclusion functions -
I Elimination of the sub-boxes which cannot contain theglobal optimum: F L(X ) > f or GL
i (X ) > 0 or 0 6∈ H(X ),where f denotes the current solution,
I STOP when accurate enclosures of the optimum areobtained.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
11/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Principle of a Branch and Bound Algorithm for aproblem with constraints
I Choice and Subdivision of the box X , (in 2 parts for eachiteration) =⇒ list of possible solutions,
I Reduction of the sub-boxes, by using a constraintpropagation technique,
I Computation of bounds of the functions F , Gj , Hj on thesub-boxes, - inclusion functions -
I Elimination of the sub-boxes which cannot contain theglobal optimum: F L(X ) > f or GL
i (X ) > 0 or 0 6∈ H(X ),where f denotes the current solution,
I STOP when accurate enclosures of the optimum areobtained.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
11/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Principle of a Branch and Bound Algorithm for aproblem with constraints
I Choice and Subdivision of the box X , (in 2 parts for eachiteration) =⇒ list of possible solutions,
I Reduction of the sub-boxes, by using a constraintpropagation technique,
I Computation of bounds of the functions F , Gj , Hj on thesub-boxes, - inclusion functions -
I Elimination of the sub-boxes which cannot contain theglobal optimum: F L(X ) > f or GL
i (X ) > 0 or 0 6∈ H(X ),where f denotes the current solution,
I STOP when accurate enclosures of the optimum areobtained.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
12/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Interval Analysis
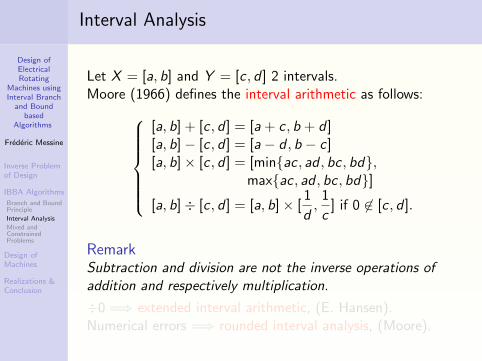
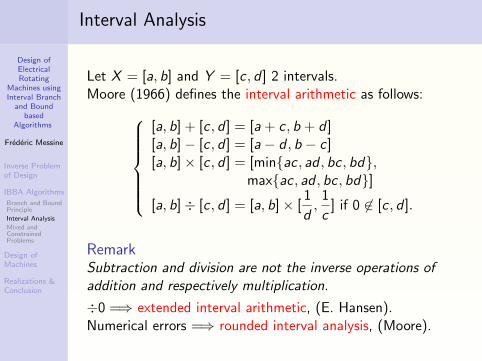
Let X = [a, b] and Y = [c , d ] 2 intervals.Moore (1966) defines the interval arithmetic as follows:
[a, b] + [c , d ] = [a + c , b + d ][a, b]− [c , d ] = [a− d , b − c][a, b]× [c , d ] = [min{ac, ad , bc , bd},
max{ac, ad , bc , bd}][a, b]÷ [c , d ] = [a, b]× [
1
d,1
c] if 0 6∈ [c , d ].
RemarkSubtraction and division are not the inverse operations ofaddition and respectively multiplication.
÷0 =⇒ extended interval arithmetic, (E. Hansen).Numerical errors =⇒ rounded interval analysis, (Moore).
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
12/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Interval Analysis
Let X = [a, b] and Y = [c , d ] 2 intervals.Moore (1966) defines the interval arithmetic as follows:
[a, b] + [c , d ] = [a + c , b + d ][a, b]− [c , d ] = [a− d , b − c][a, b]× [c , d ] = [min{ac, ad , bc , bd},
max{ac, ad , bc , bd}][a, b]÷ [c , d ] = [a, b]× [
1
d,1
c] if 0 6∈ [c , d ].
RemarkSubtraction and division are not the inverse operations ofaddition and respectively multiplication.
÷0 =⇒ extended interval arithmetic, (E. Hansen).Numerical errors =⇒ rounded interval analysis, (Moore).
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
13/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
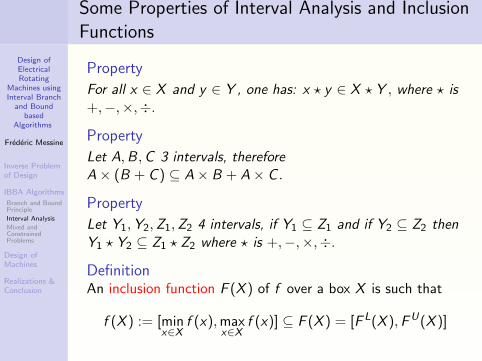
Some Properties of Interval Analysis and InclusionFunctions
Property
For all x ∈ X and y ∈ Y , one has: x ? y ∈ X ? Y , where ? is+,−,×,÷.
Property
Let A,B,C 3 intervals, thereforeA× (B + C ) ⊆ A× B + A× C .
Property
Let Y1,Y2,Z1,Z2 4 intervals, if Y1 ⊆ Z1 and if Y2 ⊆ Z2 thenY1 ? Y2 ⊆ Z1 ? Z2 where ? is +,−,×,÷.
DefinitionAn inclusion function F (X ) of f over a box X is such that
f (X ) := [minx∈X
f (x),maxx∈X
f (x)] ⊆ F (X ) = [F L(X ),FU(X )]
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
14/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
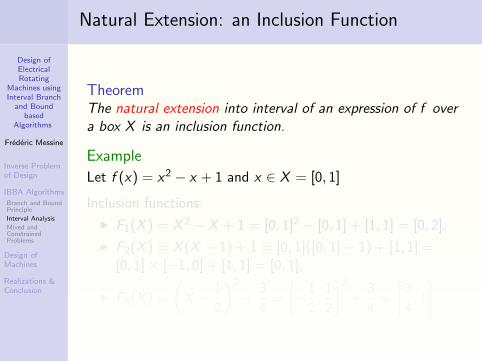
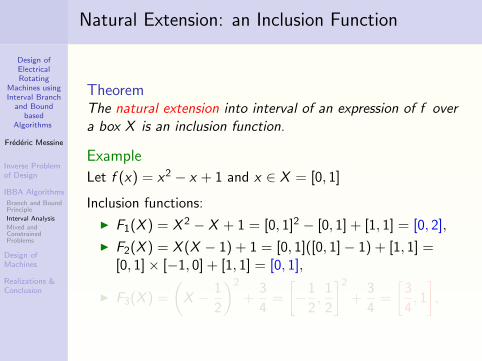
Natural Extension: an Inclusion Function
TheoremThe natural extension into interval of an expression of f overa box X is an inclusion function.
Example
Let f (x) = x2 − x + 1 and x ∈ X = [0, 1]
Inclusion functions:
I F1(X ) = X 2 − X + 1 = [0, 1]2 − [0, 1] + [1, 1] = [0, 2],
I F2(X ) = X (X − 1) + 1 = [0, 1]([0, 1]− 1) + [1, 1] =[0, 1]× [−1, 0] + [1, 1] = [0, 1],
I F3(X ) =
(X − 1
2
)2
+3
4=
[−1
2,1
2
]2
+3
4=
[3
4, 1
],
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
14/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
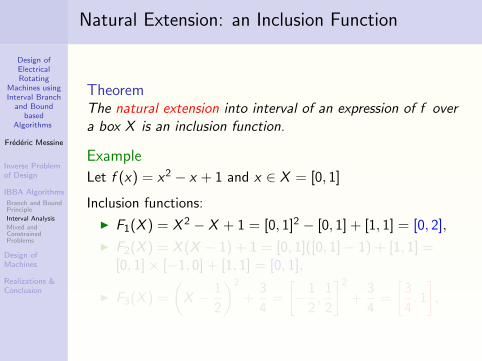
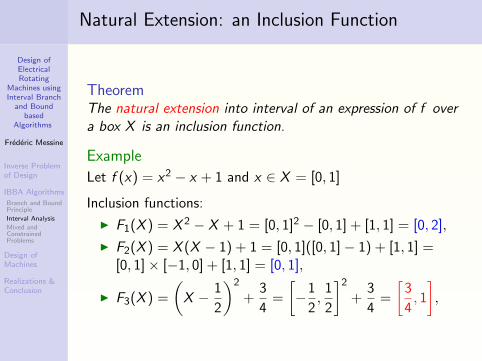
Natural Extension: an Inclusion Function
TheoremThe natural extension into interval of an expression of f overa box X is an inclusion function.
Example
Let f (x) = x2 − x + 1 and x ∈ X = [0, 1]
Inclusion functions:
I F1(X ) = X 2 − X + 1 = [0, 1]2 − [0, 1] + [1, 1] = [0, 2],
I F2(X ) = X (X − 1) + 1 = [0, 1]([0, 1]− 1) + [1, 1] =[0, 1]× [−1, 0] + [1, 1] = [0, 1],
I F3(X ) =
(X − 1
2
)2
+3
4=
[−1
2,1
2
]2
+3
4=
[3
4, 1
],
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
14/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Natural Extension: an Inclusion Function
TheoremThe natural extension into interval of an expression of f overa box X is an inclusion function.
Example
Let f (x) = x2 − x + 1 and x ∈ X = [0, 1]
Inclusion functions:
I F1(X ) = X 2 − X + 1 = [0, 1]2 − [0, 1] + [1, 1] = [0, 2],
I F2(X ) = X (X − 1) + 1 = [0, 1]([0, 1]− 1) + [1, 1] =[0, 1]× [−1, 0] + [1, 1] = [0, 1],
I F3(X ) =
(X − 1
2
)2
+3
4=
[−1
2,1
2
]2
+3
4=
[3
4, 1
],
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
14/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Natural Extension: an Inclusion Function
TheoremThe natural extension into interval of an expression of f overa box X is an inclusion function.
Example
Let f (x) = x2 − x + 1 and x ∈ X = [0, 1]
Inclusion functions:
I F1(X ) = X 2 − X + 1 = [0, 1]2 − [0, 1] + [1, 1] = [0, 2],
I F2(X ) = X (X − 1) + 1 = [0, 1]([0, 1]− 1) + [1, 1] =[0, 1]× [−1, 0] + [1, 1] = [0, 1],
I F3(X ) =
(X − 1
2
)2
+3
4=
[−1
2,1
2
]2
+3
4=
[3
4, 1
],
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
15/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
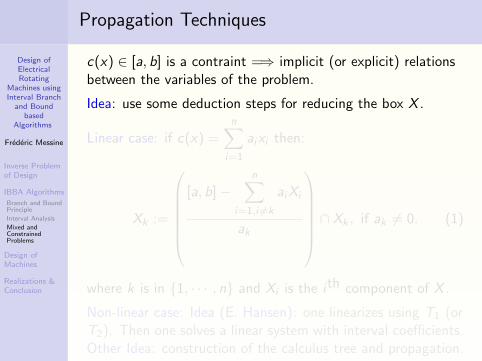
Propagation Techniques
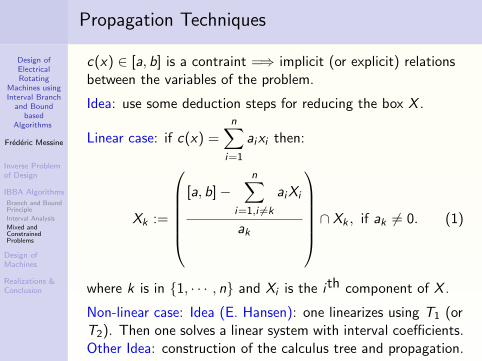
c(x) ∈ [a, b] is a contraint =⇒ implicit (or explicit) relationsbetween the variables of the problem.
Idea: use some deduction steps for reducing the box X .
Linear case: if c(x) =n∑
i=1
aixi then:
Xk :=
[a, b]−
n∑i=1,i 6=k
aiXi
ak
∩ Xk , if ak 6= 0. (1)
where k is in {1, · · · , n} and Xi is the ith component of X .
Non-linear case: Idea (E. Hansen): one linearizes using T1 (orT2). Then one solves a linear system with interval coefficients.Other Idea: construction of the calculus tree and propagation.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
15/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
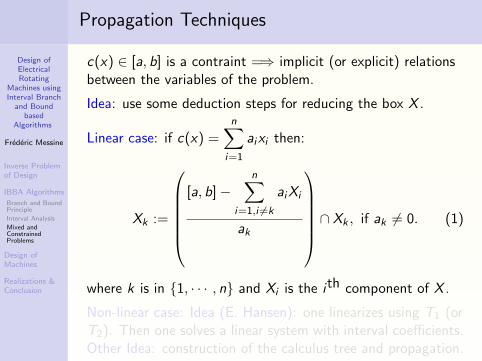
Propagation Techniques
c(x) ∈ [a, b] is a contraint =⇒ implicit (or explicit) relationsbetween the variables of the problem.
Idea: use some deduction steps for reducing the box X .
Linear case: if c(x) =n∑
i=1
aixi then:
Xk :=
[a, b]−
n∑i=1,i 6=k
aiXi
ak
∩ Xk , if ak 6= 0. (1)
where k is in {1, · · · , n} and Xi is the ith component of X .
Non-linear case: Idea (E. Hansen): one linearizes using T1 (orT2). Then one solves a linear system with interval coefficients.Other Idea: construction of the calculus tree and propagation.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
15/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Propagation Techniques
c(x) ∈ [a, b] is a contraint =⇒ implicit (or explicit) relationsbetween the variables of the problem.
Idea: use some deduction steps for reducing the box X .
Linear case: if c(x) =n∑
i=1
aixi then:
Xk :=
[a, b]−
n∑i=1,i 6=k
aiXi
ak
∩ Xk , if ak 6= 0. (1)
where k is in {1, · · · , n} and Xi is the ith component of X .
Non-linear case: Idea (E. Hansen): one linearizes using T1 (orT2). Then one solves a linear system with interval coefficients.Other Idea: construction of the calculus tree and propagation.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
16/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Example of Propagation Technique based on theCalculus Tree
Let c(x) = 2x3x2 + x1 and
c(x) = 3
where xi ∈ [1, 3] for all i ∈ {1, 2, 3}.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
16/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
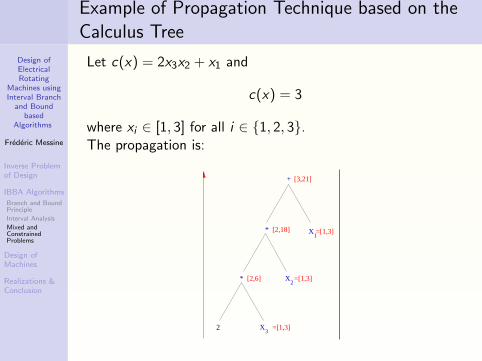
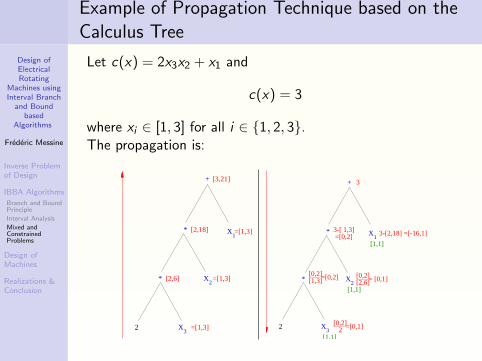
Example of Propagation Technique based on theCalculus Tree
Let c(x) = 2x3x2 + x1 and
c(x) = 3
where xi ∈ [1, 3] for all i ∈ {1, 2, 3}.The propagation is:
X
X
X3
*
+
*
2
1
2
=[1,3]
[2,6]
[2,18]
[3,21]
=[1,3]
=[1,3]
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
16/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Example of Propagation Technique based on theCalculus Tree
Let c(x) = 2x3x2 + x1 and
c(x) = 3
where xi ∈ [1, 3] for all i ∈ {1, 2, 3}.The propagation is:
X
X
X3
*
+
*
2
1
2
=[1,3]
[2,6]
[2,18]
[3,21]
=[1,3]
=[1,3] X
X
X3
*
+
*1
2
2
[1,1]
3
3-[ 1,3] =[0,2]
[0,2] =[0,2] [1,3]
3-[2,18] =[-16,1]
[0,2] = [0,1] [2,6]
[0,2] =[0,1] 2
[1,1]
[1,1]
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
17/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Algorithms for Mixed Problems
Continuous variables: real variables (dimensions of anelectrical machines such as diameter).
Discrete variables: integer (the number of pair of poles of amachine), boolean (machine with or without slot), categoricalvariable (which kind of magnet is used).
For integer and boolean variables =⇒ relaxation forcomputing bounds + particular bisection technique andpropagation.
For categorical variables =⇒ we introduce 4 particularalgorithms with propagation and retro-propagation +properties about the bisection techniques.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
17/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Algorithms for Mixed Problems
Continuous variables: real variables (dimensions of anelectrical machines such as diameter).
Discrete variables: integer (the number of pair of poles of amachine), boolean (machine with or without slot), categoricalvariable (which kind of magnet is used).
For integer and boolean variables =⇒ relaxation forcomputing bounds + particular bisection technique andpropagation.
For categorical variables =⇒ we introduce 4 particularalgorithms with propagation and retro-propagation +properties about the bisection techniques.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
17/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Branch and BoundPrinciple
Interval Analysis
Mixed andConstrainedProblems
Design ofMachines
Realizations &Conclusion
Algorithms for Mixed Problems
Continuous variables: real variables (dimensions of anelectrical machines such as diameter).
Discrete variables: integer (the number of pair of poles of amachine), boolean (machine with or without slot), categoricalvariable (which kind of magnet is used).
For integer and boolean variables =⇒ relaxation forcomputing bounds + particular bisection technique andpropagation.
For categorical variables =⇒ we introduce 4 particularalgorithms with propagation and retro-propagation +properties about the bisection techniques.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
18/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
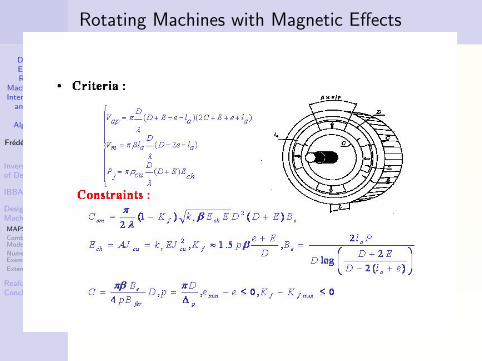
Rotating Machines with Magnetic Effects

Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
19/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Example for the Dimensioning of an ElectricalMotor
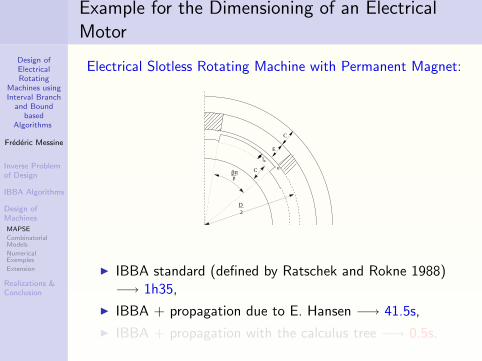
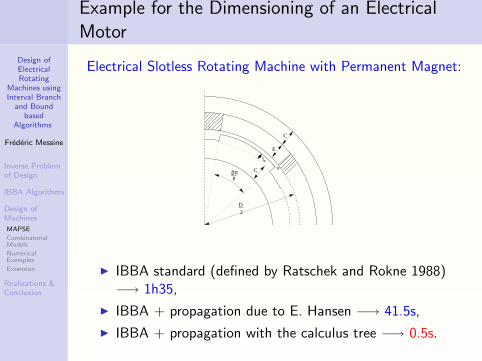
Electrical Slotless Rotating Machine with Permanent Magnet:
2
E
pβπ
laeC
C
D
I IBBA standard (defined by Ratschek and Rokne 1988)−→ 1h35,
I IBBA + propagation due to E. Hansen −→ 41.5s,
I IBBA + propagation with the calculus tree −→ 0.5s.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
19/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Example for the Dimensioning of an ElectricalMotor
Electrical Slotless Rotating Machine with Permanent Magnet:
2
E
pβπ
laeC
C
D
I IBBA standard (defined by Ratschek and Rokne 1988)−→ 1h35,
I IBBA + propagation due to E. Hansen −→ 41.5s,
I IBBA + propagation with the calculus tree −→ 0.5s.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
19/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Example for the Dimensioning of an ElectricalMotor
Electrical Slotless Rotating Machine with Permanent Magnet:
2
E
pβπ
laeC
C
D
I IBBA standard (defined by Ratschek and Rokne 1988)−→ 1h35,
I IBBA + propagation due to E. Hansen −→ 41.5s,
I IBBA + propagation with the calculus tree −→ 0.5s.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
20/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
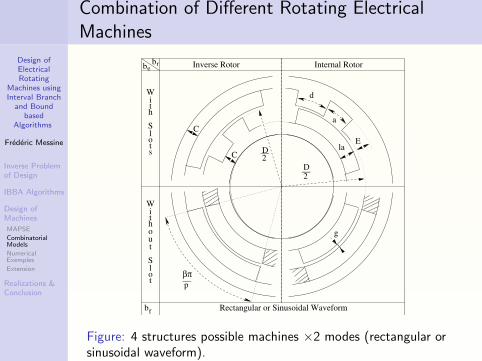
Combination of Different Rotating ElectricalMachines
b
b b
Slot
With
Slot
d
C
C D__2
D__2
laE
a
g
βπ__p
re
f
s
Internal RotorInverse Rotor
Rectangular or Sinusoidal Waveform
Without
Figure: 4 structures possible machines ×2 modes (rectangular orsinusoidal waveform).
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
21/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discrete Variables for Modeling ElectricalMachines
1. br = 1 for machines with an internal rotoric configurationand br = 0 for an external one,
2. be = 1 for machines with slots or be = 0 slotlessmachines,
3. bf = 1 represents rectangular waveform or bf = 0 for asinusoıdale one.
3 boolean variables to represent 8 possible structures + 2categorical variables.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
22/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
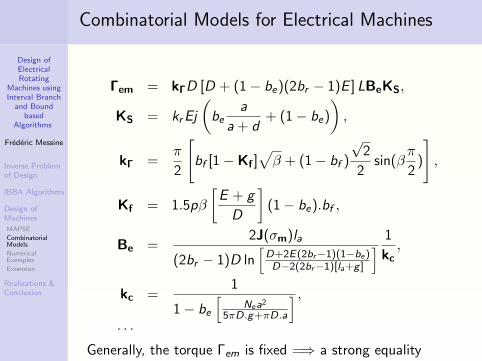
Combinatorial Models for Electrical Machines
Γem = kΓD [D + (1− be)(2br − 1)E ] LBeKS,
KS = krEj
(be
a
a + d+ (1− be)
),
kΓ =π
2
[bf [1−Kf ]
√β + (1− bf )
√2
2sin(β
π
2)
],
Kf = 1.5pβ
[E + g
D
](1− be).bf ,
Be =2J(σm)la
(2br − 1)D ln[
D+2E(2br−1)(1−be)D−2(2br−1)[la+g ]
] 1
kc,
kc =1
1− be
[Nea2
5πD.g+πD.a
] ,
. . .
Generally, the torque Γem is fixed =⇒ a strong equalityconstraint.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
23/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
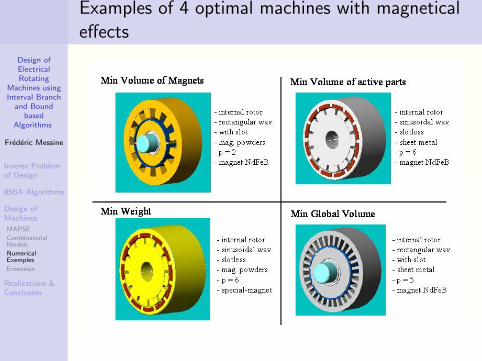
Examples of 4 optimal machines with magneticaleffects
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
24/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
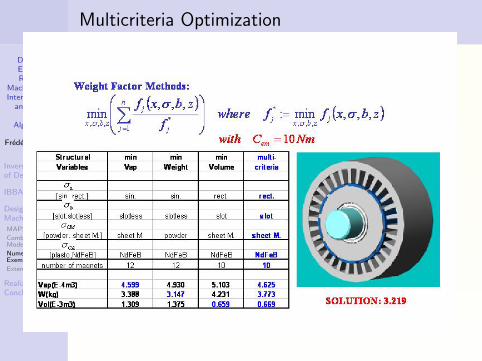
Multicriteria Optimization

Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
25/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Analytical versus Numerical Models
Schedule of conditions =⇒ a fixed torque.
Optimal solutions satisfy the equality constraint about 1%.
Computation of the torque using finite elements methods (bya numerical model); software EFCAD (from the LEEI) orANSYS.
EFCAD and ANSYS are too general =⇒ NUMT
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
25/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Analytical versus Numerical Models
Schedule of conditions =⇒ a fixed torque.
Optimal solutions satisfy the equality constraint about 1%.
Computation of the torque using finite elements methods (bya numerical model); software EFCAD (from the LEEI) orANSYS.
EFCAD and ANSYS are too general =⇒ NUMT
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
25/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Analytical versus Numerical Models
Schedule of conditions =⇒ a fixed torque.
Optimal solutions satisfy the equality constraint about 1%.
Computation of the torque using finite elements methods (bya numerical model); software EFCAD (from the LEEI) orANSYS.
EFCAD and ANSYS are too general =⇒ NUMT
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
25/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Analytical versus Numerical Models
Schedule of conditions =⇒ a fixed torque.
Optimal solutions satisfy the equality constraint about 1%.
Computation of the torque using finite elements methods (bya numerical model); software EFCAD (from the LEEI) orANSYS.
EFCAD and ANSYS are too general =⇒ NUMT
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
26/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
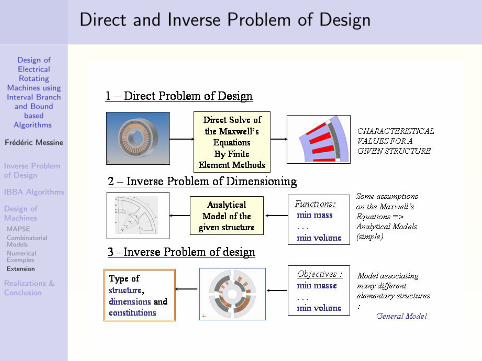
Direct and Inverse Problem of Design
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
27/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
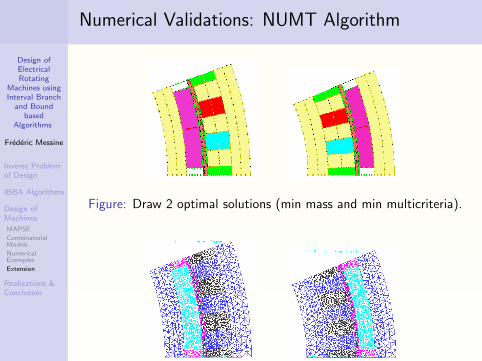
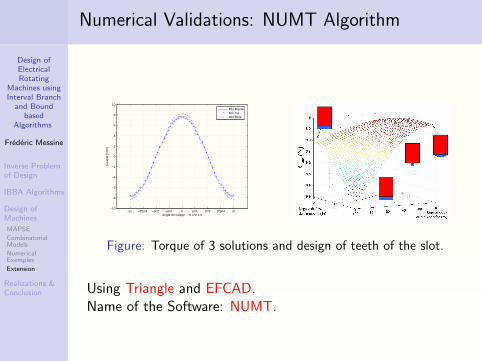
Numerical Validations: NUMT Algorithm
Figure: Draw 2 optimal solutions (min mass and min multicriteria).
Figure: Mesh 2 above machines
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
28/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Numerical Validations: NUMT Algorithm
−pi −3*pi/4 −pi/2 −pi/4 0 pi/4 pi/2 3*pi/4 pi−10
−8
−6
−4
−2
0
2
4
6
8
10
Angle de calage : −π ≤ Ψ ≤ π
Cou
ple
(N.m
)Min MasseMin VolMin Multi
Figure: Torque of 3 solutions and design of teeth of the slot.
Using Triangle and EFCAD.Name of the Software: NUMT.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
29/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discussions
Analytical Value 6= Numerical Value
Generally about 10% !
I If the gap is less than 3% our solution is validated.
I Else =⇒ modifications of the solution until the numericalvalue is correct.
Optimize with a black-box constraint:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}NUMT (x , z , σ, b) = Γem
Extension of IBBA ?
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
29/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discussions
Analytical Value 6= Numerical Value
Generally about 10% !
I If the gap is less than 3% our solution is validated.
I Else =⇒ modifications of the solution until the numericalvalue is correct.
Optimize with a black-box constraint:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}NUMT (x , z , σ, b) = Γem
Extension of IBBA ?
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
29/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discussions
Analytical Value 6= Numerical Value
Generally about 10% !
I If the gap is less than 3% our solution is validated.
I Else =⇒ modifications of the solution until the numericalvalue is correct.
Optimize with a black-box constraint:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}NUMT (x , z , σ, b) = Γem
Extension of IBBA ?
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
29/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discussions
Analytical Value 6= Numerical Value
Generally about 10% !
I If the gap is less than 3% our solution is validated.
I Else =⇒ modifications of the solution until the numericalvalue is correct.
Optimize with a black-box constraint:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}NUMT (x , z , σ, b) = Γem
Extension of IBBA ?
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
29/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Discussions
Analytical Value 6= Numerical Value
Generally about 10% !
I If the gap is less than 3% our solution is validated.
I Else =⇒ modifications of the solution until the numericalvalue is correct.
Optimize with a black-box constraint:min
x∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}NUMT (x , z , σ, b) = Γem
Extension of IBBA ?
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
30/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
IBBA+NUMT
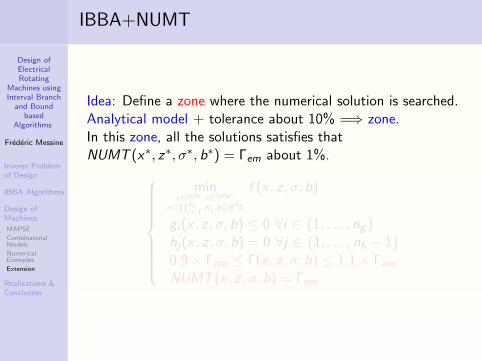
Idea: Define a zone where the numerical solution is searched.Analytical model + tolerance about 10% =⇒ zone.In this zone, all the solutions satisfies thatNUMT (x∗, z∗, σ∗, b∗) = Γem about 1%.
minx∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}0.9× Γem ≤ Γ(x , z , σ, b) ≤ 1.1× Γem
NUMT (x , z , σ, b) = Γem
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
30/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
IBBA+NUMT
Idea: Define a zone where the numerical solution is searched.Analytical model + tolerance about 10% =⇒ zone.In this zone, all the solutions satisfies thatNUMT (x∗, z∗, σ∗, b∗) = Γem about 1%.
minx∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}0.9× Γem ≤ Γ(x , z , σ, b) ≤ 1.1× Γem
NUMT (x , z , σ, b) = Γem
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
30/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
IBBA+NUMT
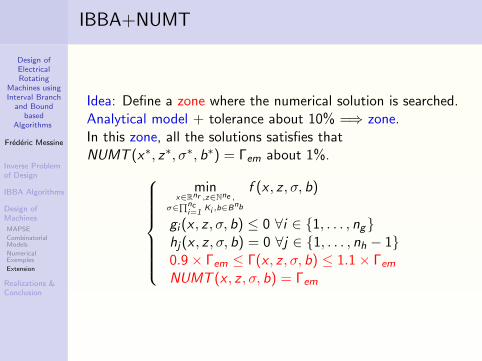
Idea: Define a zone where the numerical solution is searched.Analytical model + tolerance about 10% =⇒ zone.In this zone, all the solutions satisfies thatNUMT (x∗, z∗, σ∗, b∗) = Γem about 1%.
minx∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}0.9× Γem ≤ Γ(x , z , σ, b) ≤ 1.1× Γem
NUMT (x , z , σ, b) = Γem
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
30/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
IBBA+NUMT
Idea: Define a zone where the numerical solution is searched.Analytical model + tolerance about 10% =⇒ zone.In this zone, all the solutions satisfies thatNUMT (x∗, z∗, σ∗, b∗) = Γem about 1%.
minx∈Rnr ,z∈Nne ,
σ∈Qnc
i=1Ki ,b∈Bnb
f (x , z , σ, b)
gi (x , z , σ, b) ≤ 0 ∀i ∈ {1, . . . , ng}hj(x , z , σ, b) = 0 ∀j ∈ {1, . . . , nh − 1}0.9× Γem ≤ Γ(x , z , σ, b) ≤ 1.1× Γem
NUMT (x , z , σ, b) = Γem
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
31/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Algorithm IBBA+NUMT
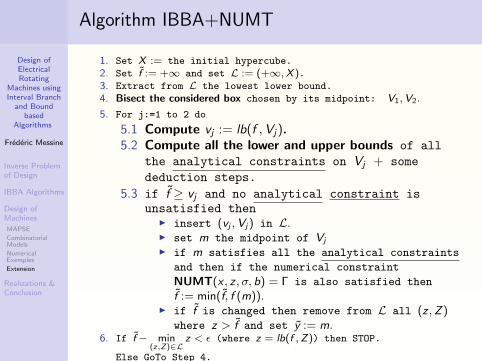
1. Set X := the initial hypercube.
2. Set f := +∞ and set L := (+∞, X ).3. Extract from L the lowest lower bound.
4. Bisect the considered box chosen by its midpoint: V1, V2.
5. For j:=1 to 2 do
5.1 Compute vj := lb(f ,Vj).5.2 Compute all the lower and upper bounds of all
the analytical constraints on Vj + somededuction steps.
5.3 if f ≥ vj and no analytical constraint isunsatisfied then
I insert (vj , Vj) in L.I set m the midpoint of Vj
I if m satisfies all the analytical constraints
and then if the numerical constraint
NUMT(x , z , σ, b) = Γ is also satisfied then
f := min(f, f (m)).I if f is changed then remove from L all (z , Z)
where z > f and set y := m.6. If f− min
(z,Z)∈Lz < ε (where z = lb(f , Z)) then STOP.
Else GoTo Step 4.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
32/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
Numerical Example 1 with IBBA+NUMT
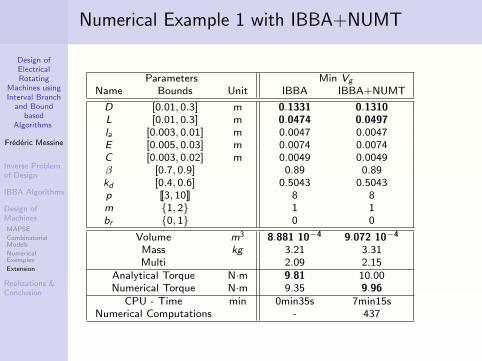
Parameters Min Vg
Name Bounds Unit IBBA IBBA+NUMT
D [0.01, 0.3] m 0.1331 0.1310L [0.01, 0.3] m 0.0474 0.0497la [0.003, 0.01] m 0.0047 0.0047E [0.005, 0.03] m 0.0074 0.0074C [0.003, 0.02] m 0.0049 0.0049β [0.7, 0.9] 0.89 0.89kd [0.4, 0.6] 0.5043 0.5043p [[3, 10]] 8 8m {1, 2} 1 1br {0, 1} 0 0
Volume m3 8.881 10−4 9.072 10−4
Mass kg 3.21 3.31Multi 2.09 2.15
Analytical Torque N·m 9.81 10.00Numerical Torque N·m 9.35 9.96
CPU - Time min 0min35s 7min15sNumerical Computations - 437
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
33/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
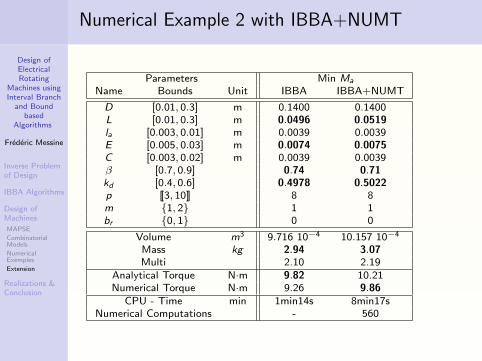
Numerical Example 2 with IBBA+NUMT
Parameters Min Ma
Name Bounds Unit IBBA IBBA+NUMT
D [0.01, 0.3] m 0.1400 0.1400L [0.01, 0.3] m 0.0496 0.0519la [0.003, 0.01] m 0.0039 0.0039E [0.005, 0.03] m 0.0074 0.0075C [0.003, 0.02] m 0.0039 0.0039β [0.7, 0.9] 0.74 0.71kd [0.4, 0.6] 0.4978 0.5022p [[3, 10]] 8 8m {1, 2} 1 1br {0, 1} 0 0
Volume m3 9.716 10−4 10.157 10−4
Mass kg 2.94 3.07Multi 2.10 2.19
Analytical Torque N·m 9.82 10.21Numerical Torque N·m 9.26 9.86
CPU - Time min 1min14s 8min17sNumerical Computations - 560
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
34/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
MAPSE
CombinatorialModels
NumericalExemples
Extension
Realizations &Conclusion
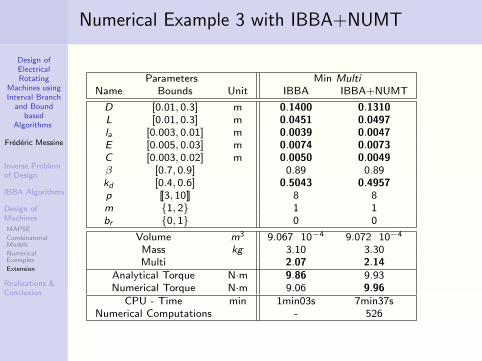
Numerical Example 3 with IBBA+NUMT
Parameters Min MultiName Bounds Unit IBBA IBBA+NUMT
D [0.01, 0.3] m 0.1400 0.1310L [0.01, 0.3] m 0.0451 0.0497la [0.003, 0.01] m 0.0039 0.0047E [0.005, 0.03] m 0.0074 0.0073C [0.003, 0.02] m 0.0050 0.0049β [0.7, 0.9] 0.89 0.89kd [0.4, 0.6] 0.5043 0.4957p [[3, 10]] 8 8m {1, 2} 1 1br {0, 1} 0 0
Volume m3 9.067 10−4 9.072 10−4
Mass kg 3.10 3.30Multi 2.07 2.14
Analytical Torque N·m 9.86 9.93Numerical Torque N·m 9.06 9.96
CPU - Time min 1min03s 7min37sNumerical Computations - 526
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
35/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Some Realizations
Figure: Motor with a strongest torque.
Figure: Design of piezoelectric bimorphs.
Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
36/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
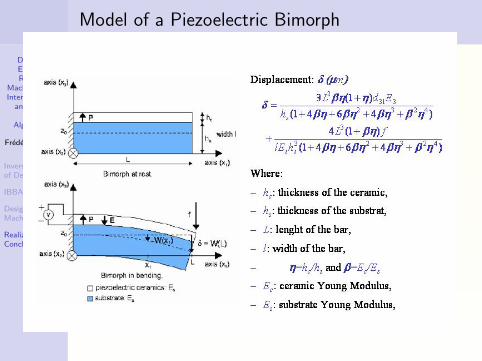
Model of a Piezoelectric Bimorph

Design ofElectricalRotating
Machines usingInterval Branch
and Boundbased
Algorithms
37/ 37
Frederic Messine
Inverse Problemof Design
IBBA Algorithms
Design ofMachines
Realizations &Conclusion
Optimal Design of the Piezoelectric Bimorph
Top Related