







Languages
Pages
Legal

IP, José Bioucas Dias, IST, 2015 1
Convolution operators
Spectral Representation
Bandlimited Signals/Systems
Inverse Operator
Null and Range Spaces
Sampling, DFT, and FFT
Tikhonov Regularization/Wiener Filtering
IP, José Bioucas Dias, IST, 2015 2
Convolution Operators
Definition:
Spectral representation of a convolution operator:
FT

IP, José Bioucas Dias, IST, 2015 3
• A is linear and bounded
• A is bounded:
Let
is continuous
Adjoint of a convolution operator
Properties
Parseval’s Theorem

IP, José Bioucas Dias, IST, 2015 4
Adjoint of convolution operator (cont.)
since
Inverse of a convolution operator or has isolated zeros
as
is not bounded
is defined only if
IP, José Bioucas Dias, IST, 2015 5
Bandlimited convolution operators/systems
is bandlimited with band B, i.e.,
are orthogonal

IP, José Bioucas Dias, IST, 2015 6
Sampling 2D signals

IP, José Bioucas Dias, IST, 2015 7
Sampling 2D signals
IP, José Bioucas Dias, IST, 2015 8
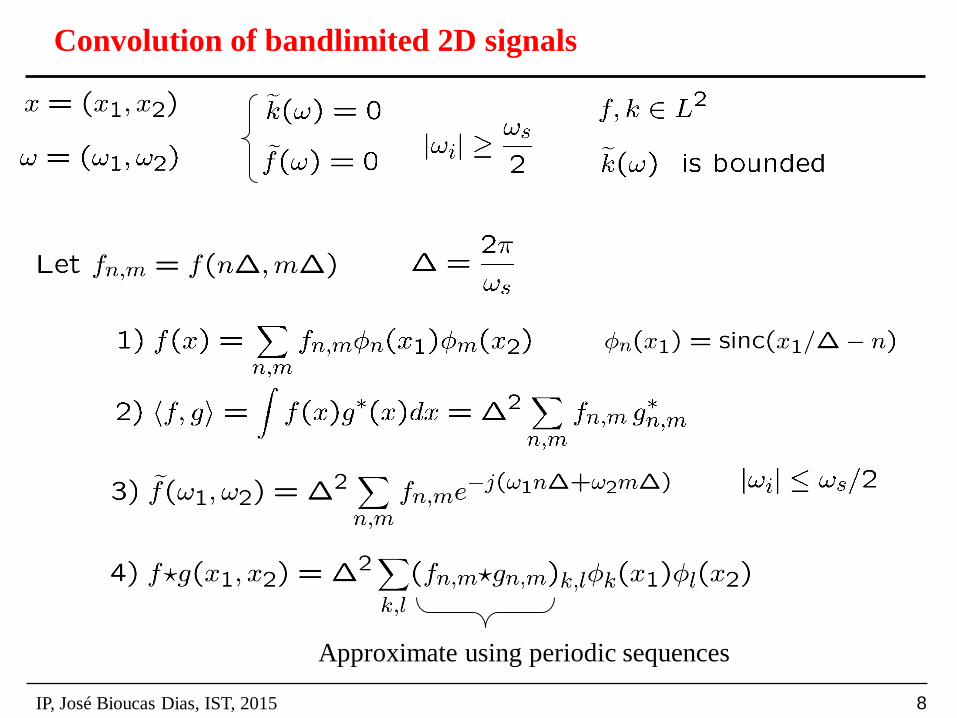
Convolution of bandlimited 2D signals
Approximate using periodic sequences

IP, José Bioucas Dias, IST, 2015 9
From continuous to discrete representation
Assume that
Let
Let is N-periodic sequences such that
Discrete Fourier Transform (DFT)
IP, José Bioucas Dias, IST, 2015 10
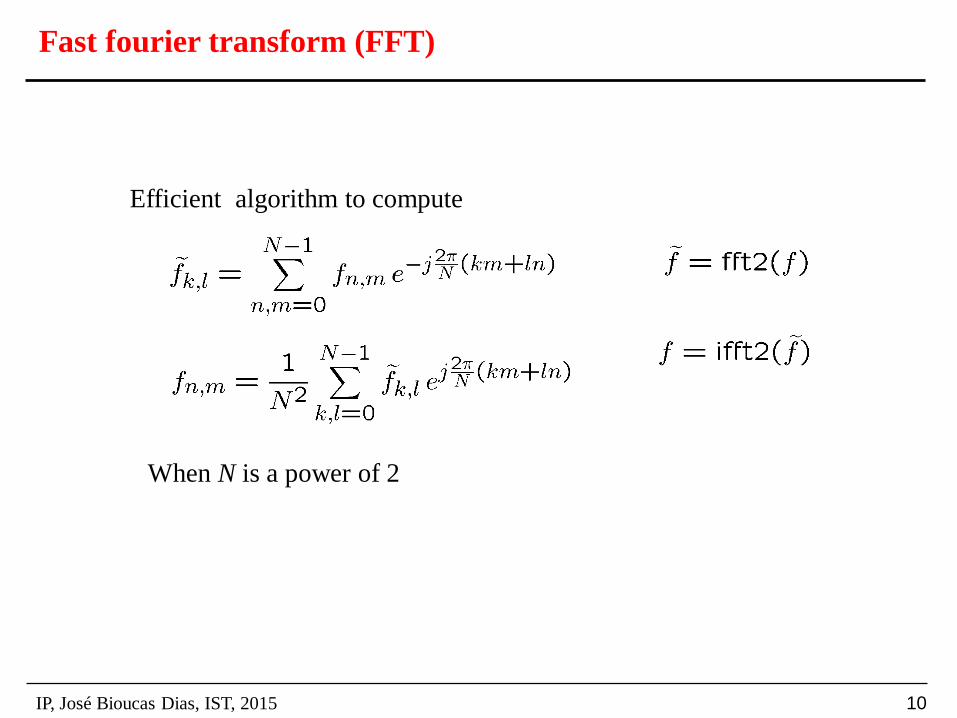
Fast fourier transform (FFT)
Efficient algorithm to compute
When N is a power of 2

IP, José Bioucas Dias, IST, 2015 11
Vector space perspective
Let vectors defined in Euclidian vector space with inner product
Parseval generalized equality
Basis
IP, José Bioucas Dias, IST, 2015 12
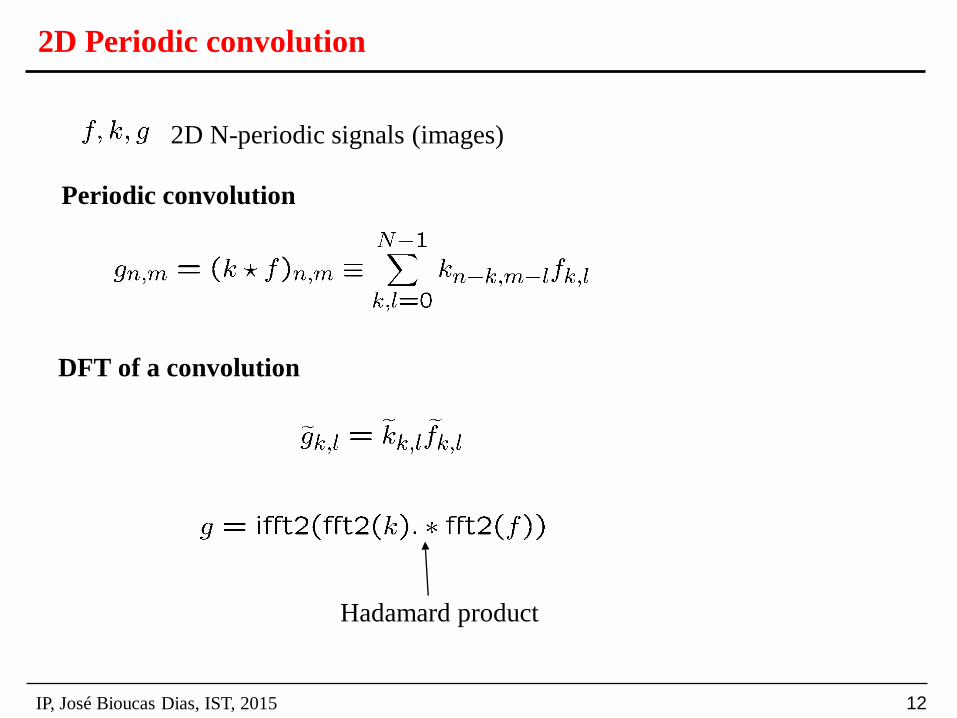
2D Periodic convolution
2D N-periodic signals (images)
Periodic convolution
DFT of a convolution
Hadamard product
IP, José Bioucas Dias, IST, 2015 13
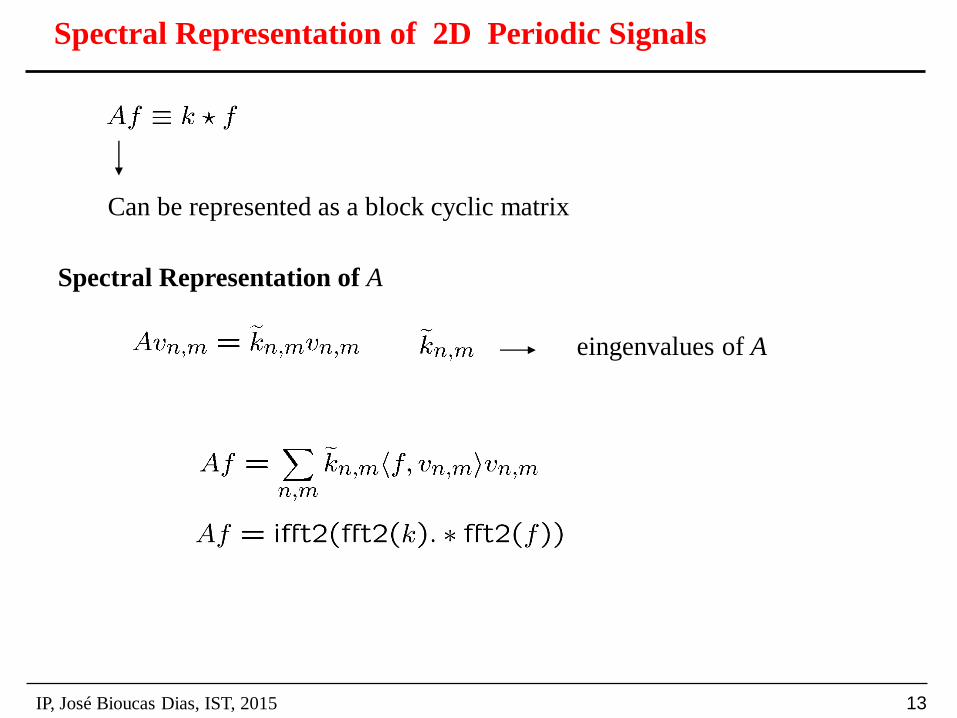
Spectral Representation of 2D Periodic Signals
Can be represented as a block cyclic matrix
Spectral Representation of A
eingenvalues of A
IP, José Bioucas Dias, IST, 2015 14
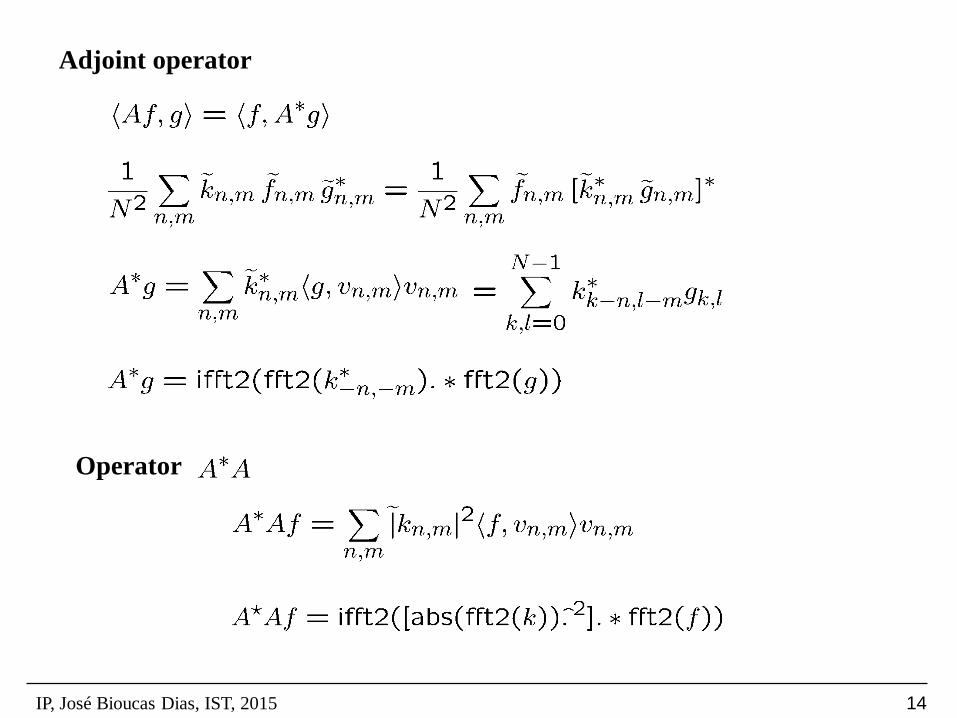
Adjoint operator
Operator

IP, José Bioucas Dias, IST, 2015 15
Inverse operator
Let

IP, José Bioucas Dias, IST, 2015 16
Deconvolution Examples
Imaging Systems
Linear Imaging
System
System noise + Poisson noise
Impulsive Response function
or
Point spread function (PSF)
Invariant systems
is the transfer function (TF)

IP, José Bioucas Dias, IST, 2015 17
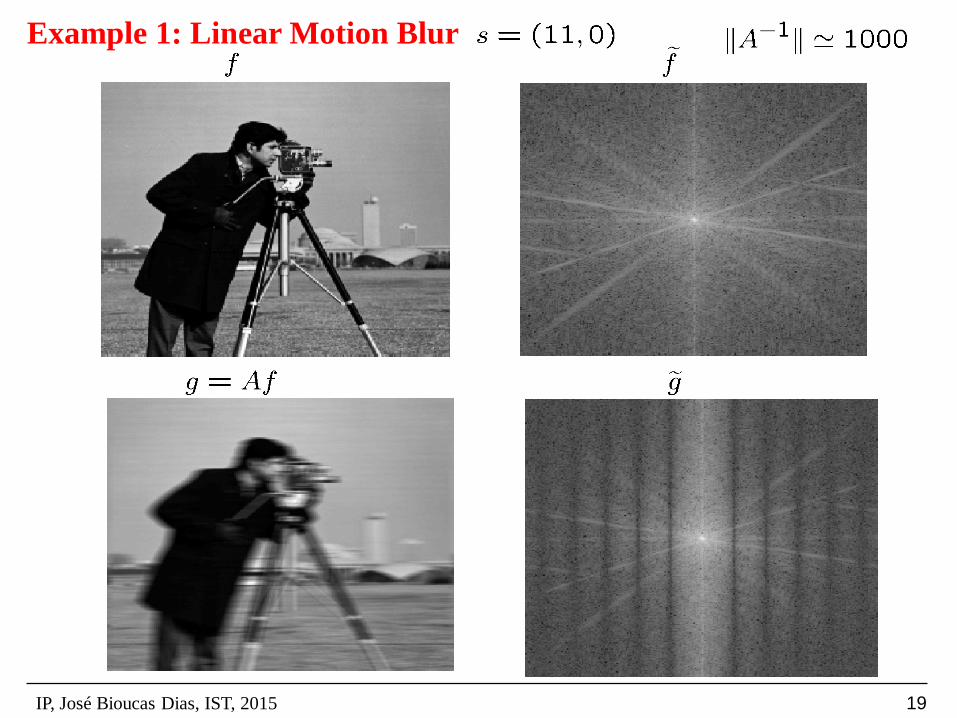
Example 1: linear motion blur
lens plane
Let a(t)=ct for , then
target velocity

IP, José Bioucas Dias, IST, 2015 18
Example 1: Linear motion blur
IP, José Bioucas Dias, IST, 2015 19
Example 1: Linear Motion Blur
IP, José Bioucas Dias, IST, 2015 20
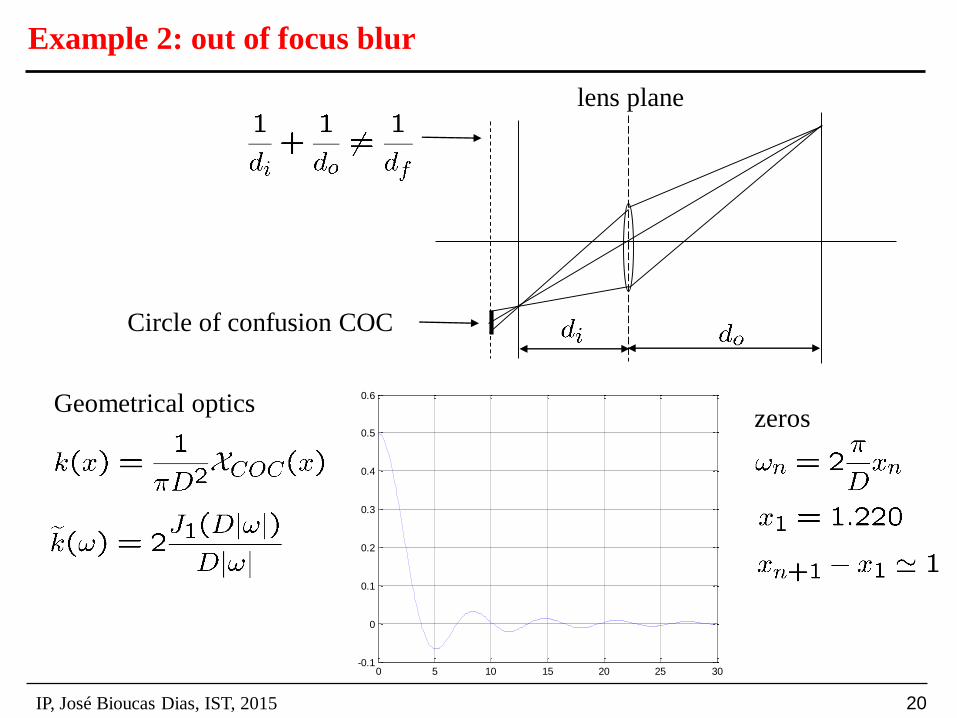
Example 2: out of focus blur
lens plane
Circle of confusion COC
Geometrical optics
0 5 10 15 20 25 30-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
zeros

IP, José Bioucas Dias, IST, 2015 21
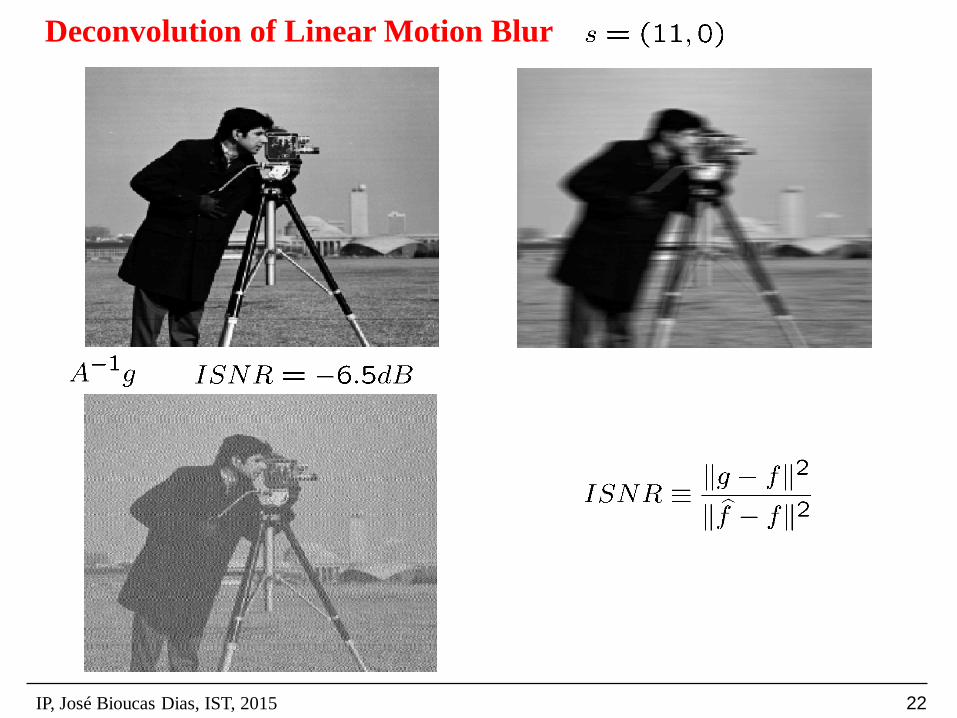
Deconvolution of linear motion blur
Let and
IP, José Bioucas Dias, IST, 2015 22
Deconvolution of Linear Motion Blur
IP, José Bioucas Dias, IST, 2015 23
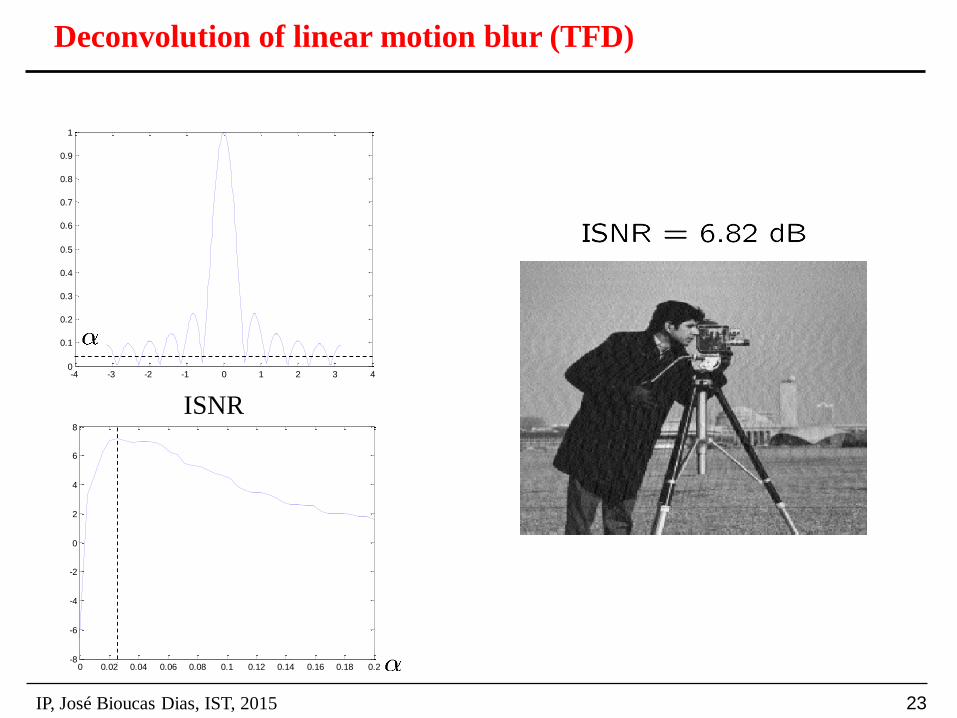
Deconvolution of linear motion blur (TFD)
-4 -3 -2 -1 0 1 2 3 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-8
-6
-4
-2
0
2
4
6
8
ISNR

IP, José Bioucas Dias, IST, 2015 24
Deconvolution of Linear Motion Blur (Tikhonov regularization)
Assuming that D is cyclic convolution operator
Wiener filter
Regularization
filter
IP, José Bioucas Dias, IST, 2015 25
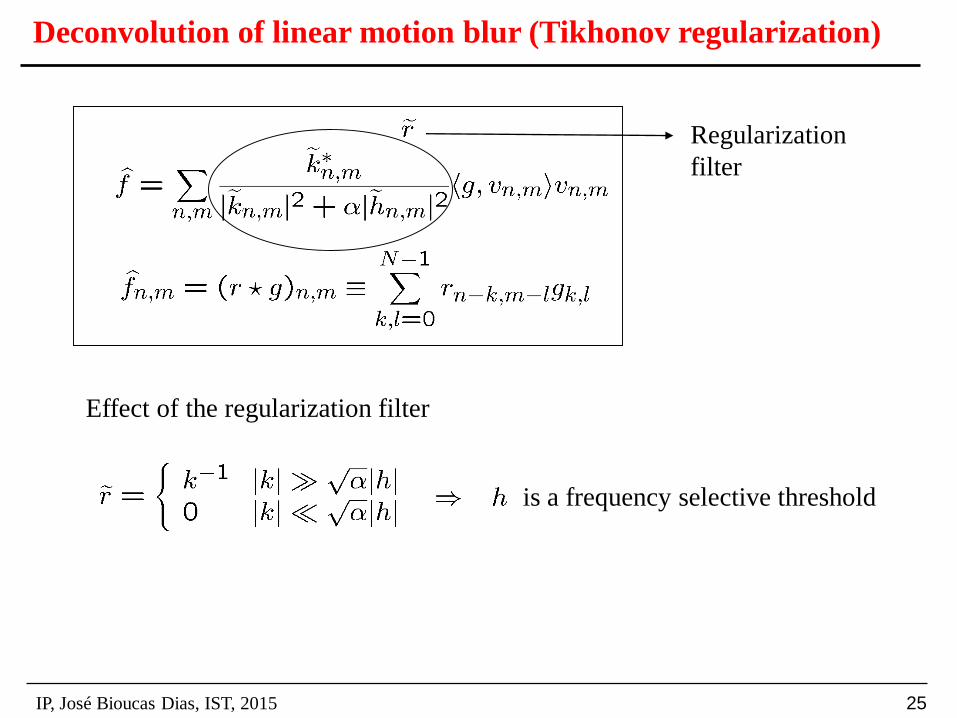
Deconvolution of linear motion blur (Tikhonov regularization)
Regularization
filter
Effect of the regularization filter
is a frequency selective threshold
IP, José Bioucas Dias, IST, 2015 26
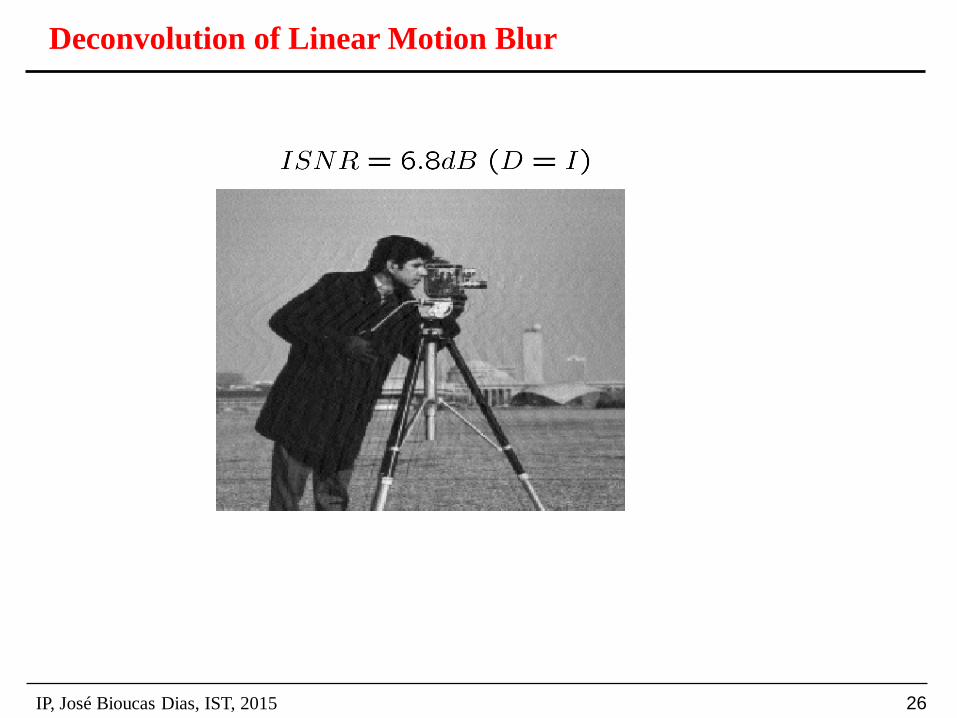
Deconvolution of Linear Motion Blur
IP, José Bioucas Dias, IST, 2015 27
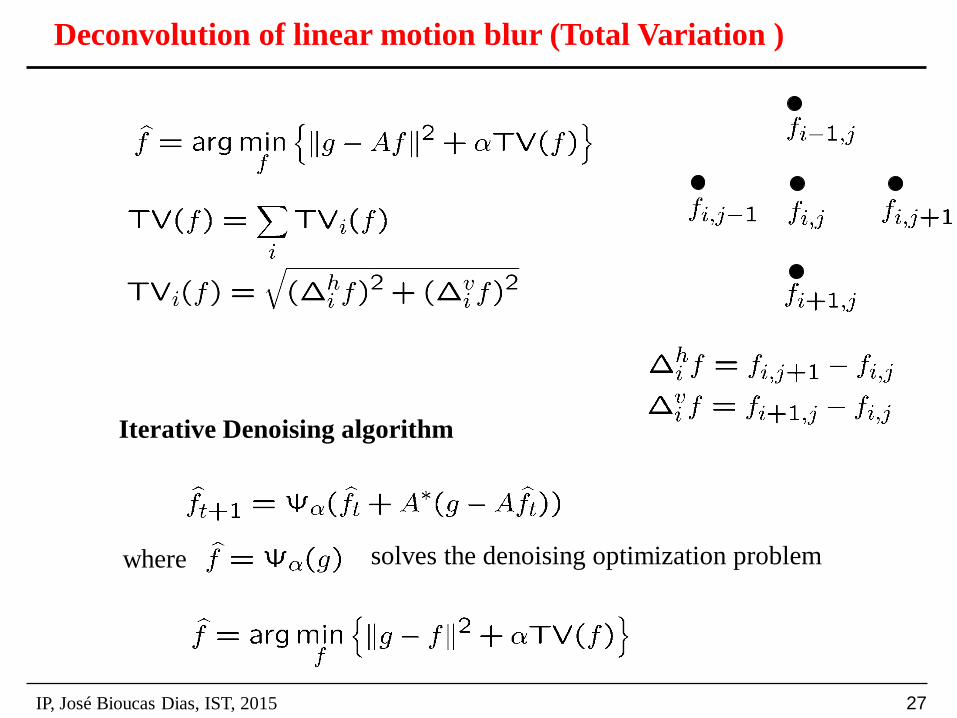
Deconvolution of linear motion blur (Total Variation )
Iterative Denoising algorithm
where solves the denoising optimization problem
IP, José Bioucas Dias, IST, 2015 28
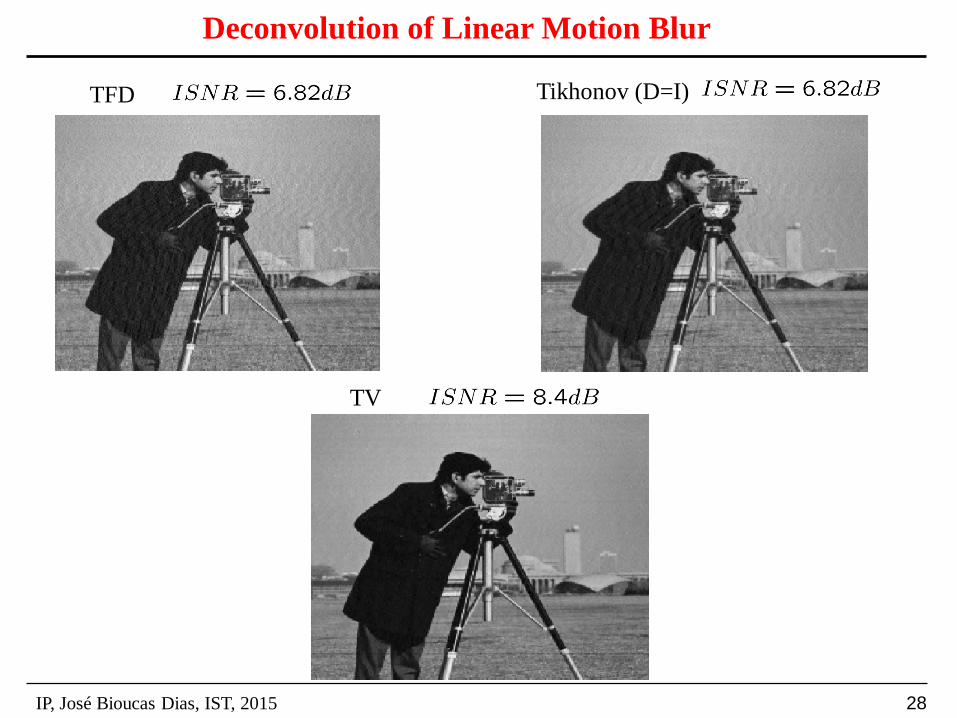
Deconvolution of Linear Motion Blur
TFD Tikhonov (D=I)
TV
Top Related