







Languages
Pages
Legal


Controlling an Autonomous Robotusing Spiking Neural Networks
Author:
Lovísa Irpa Helgadóttir
A Thesis submitted to the Techische Universität Berlin
in partial fulfilment of the degree of
master of science
Bernstein center for computational Neuroscience
July 2012
Bernstein Center forComputational NeuroscienceBerlin
Supervisor:
Prof. Martin P. Nawrot

Declaration
I declare in lieu of oath that I have written this thesis myself and have not used any
sources or resources other than stated for its preparation
Berlin, July 17th 2012
Lovísa Irpa Helgadóttir
i

Abstract
Here, a new platform that uses a spiking neural network simulator to control an autonomous
robot is presented. The robot gathers real-time sensory information about its environment
using a light sensor and a camera, that can detect color regions. The sensory information is
used as input to the SNN simulator, where it is processed and transformed into an output
signal, that is sent back to the robot as motor commands. The platform was tested on
three di�erent paradigms; phototaxis, where the robot was supposed to go towards a region
with higher illumination, chromatotaxis, where the robot was supposed to �nd targets of
a speci�c color, and associative learning, where the robot formed an association between a
speci�c color and a light stimulus, that served as a reward. The platform makes simulating
SNN models of sensory processing, learning and memory, on a robot, a simple and easy
task.
ii
Acknowledgements
I would like to thank Prof. Martin Nawrot, for giving me the opportunity to do this project.
Joachim Haenicke, for all the help, the endless discussions we had, also about the project,
and for reading over this manuscript. Hamid Moballegh for his help with the HaViMo
camera. Tim Landgraf for his input and enthusiasm. Fifa Finnsdottir for reading over the
manuscript.
Thanks to my family, especially my sisters, Ásta Guðrún, Rakel Björt, Margrét Ása and
my brother Heiðar Óli for their unconditional support and being greatest siblings in the
world.
Ásta Lovísa for being there for me and pressing buttons.
Saikat Ray, Hadi Roohani Rankoohi, Tiziano D'Albis, Helene Schmidt for all the times we
have shared and being my second family here in Berlin. To all my friends all over the world,
who have supported and believed in me.
I would also like to thank the professors and sta� of the BCCN for helping me get this close
to the �nishing line.
In the loving memory of Sigþór Bessi Bjarnason (1985-2011). I have been and always shall
be your friend.
Berlin, July 17th 2012
Lovísa Irpa Helgadóttir
iii

List of Figures
1 Overview of the Drosophila Olfactory Learning Network . . . . . . . . . . . 4
2 iqr - SNN Simulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Arduino Duemilanove and Arduino IDE . . . . . . . . . . . . . . . . . . . . 9
4 DfRobotShop Rover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5 HaViMo 2.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Overview of Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7 Arena Measurements and Target Placement . . . . . . . . . . . . . . . . . . 18
8 Motor Function Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
9 Raster Plots of the Pre-Motor Neuron Group . . . . . . . . . . . . . . . . . . 21
10 Robot Path: Phototaxis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
11 Robot Path: Chromatotaxis Blue Target . . . . . . . . . . . . . . . . . . . . 25
12 Robot Path: chromatotaxis Red Target . . . . . . . . . . . . . . . . . . . . . 26
13 Associative Learning Network . . . . . . . . . . . . . . . . . . . . . . . . . . 27
14 Screenshot: Association Raster and Connection Plots . . . . . . . . . . . . . 29
15 Robot Path: Associative Learning Color Red . . . . . . . . . . . . . . . . . 30
16 Robot Path: Associative Learning Color Blue . . . . . . . . . . . . . . . . . 30
iv
List of Tables
1 Features of Arduino Duemilanove . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Common Arduino Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 moduleArduinoAnalog Input and Output Groups . . . . . . . . . . . . . . . 13
4 Details of Motor Function Network . . . . . . . . . . . . . . . . . . . . . . . 22
5 WiFi Con�guration for Ubuntu . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Socat Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
v
Contents
Preface i
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
1 Introduction 1
1.1 Spiking Neural Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Associative Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Neurorobotics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Platform Development 6
2.1 iqr - Spiking Neural Network Simulator . . . . . . . . . . . . . . . . . . . . 6
2.2 Arduino - A Robotic Platform . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 HaViMo - Vision Processing Module . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Wireless Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 A Robotic Platform Controlled by a SNN Simulator . . . . . . . . . . . . . . 15
3 Test Cases 18
3.1 Phototaxis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Chromatotaxis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3 Associative Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Conclusions and Future Work 31
References 34
A Wireless Communication 35
A.1 Setting up the DfRobot WiFi Shield v. 2.1 for Arduino . . . . . . . . . . . . 35
A.2 WiFi Con�guration for Ubuntu . . . . . . . . . . . . . . . . . . . . . . . . . 37
vi

A.3 Socat Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
B Code 39
B.1 Arduino Firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
B.2 HaViMo Library for Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
vii

1 Introduction
In today's world autonomous robots designed to perform pre-programmed tasks are quite
common. Robots are capable of crawling, walking, �ying, swimming, and using sensory
information about the world around them, through visual, auditory, temperature, air�ow,
GPS sensors etc. to achieve their prede�ned goals. Even though great technological ad-
vances in robotics have taken place in recent years, robots are nowhere close to performing
as well in a real dynamic environment as animals with a nervous system, such as insects.
Placing a robot in an unknown environment is unlikely to yield any successful results, while
most animals and insects are able to learn and adapt to a new environment in order to
survive.
Spiking neural networks (SNN) have gained more and more interest in recent years. They
are a step towards a more biologically realistic representation of neural activity in the ner-
vous system and are used to create models of learning, memory and adaptation. Spiking
neurons have proven to be excellent as a control system in biological organisms. There-
fore, SNNs should have the potential of producing good control systems for autonomous
agents. However, designing circuits of spiking neurons with a given functionality is still a
challenging task and to date, the number of autonomous robots using these SNNs is small
and mostly focused on the �rst stages of sensory processing or pattern generation in motor-
control.
The main goal of this thesis was to create a platform which enables a spiking neural network
simulator to control a robot and to test this platform on simple network models of taxis
and associative learning.
1

1.1 Spiking Neural Networks
Nervous systems convey information through action potential (spikes). A spike travels
along the axon of a neuron until it reaches the cells' synapses. There, a neurotransmitter is
released into the extracellular body and reaches the matching receptors of the post-synaptic
neuron. This triggers a post-synaptic potential that can either have an excitatory or an
inhibitory e�ect on the post-synaptic neuron [7].
SNNs are a way of modelling these neurons in a biologically realistic way. Unlike other
Arti�cial Neural Network (ANN) that use rate-coding, i.e. higher rates of �ring correlate
with higher output, SNNs use pulse coding or temporal coding where spike timing is the
important aspect of information processing [7] [18]. SNNs have been shown be computa-
tionally more powerful than the classical ANNs [11] and more robust, since noise and failure
of individual elements (neurons or synapses) do not disrupt the network function [18]. They
should be ideal for robotic control, allowing robots to perform tasks with minimal knowl-
edge about the environment. However, implementing SNNs onto hardware is not an easy
task, and still the number of robots using SNNs is low.
Adaptive Intergrate-And-Fire Neurons
The best known model of spiking neurons is the integrate-and-�re neuron (IFN). It is based
on a simple principle of electronics, where the neuron acts as a low pass �lter, i.e. a circuit
with a resistor and a capacitor in parallel and is described by
τmdV
dt= EL − V +RmIe, (1)
where V is the membrane potential, EL is the reversal potential, τm is the membrane time
constant, Rm is the membrane resistance and Ie is the stimulating current. To generate
spikes, the membrane potential V must reach a predetermined threshold Vth. Then a spike
is �red and the membrane potential is reset. When a constant current is injected into
the neuron, most real-neurons exhibit spike-rate adaptation, i.e. the inter-spike interval
2

lengthens with time, before settling to a steady state value. By including an additional
current into the model described in equation (1) we can add the spike-rate adaptation to
the model,
τmdV
dt= EL − V − rmgsra(V − Esra) +RmIe. (2)
Here, gsra is the spike-rate adaptation conductance that increases with every spike the
neuron �res, introducing a current that drives the membrane potential towards the reversal
potential Esra, causing the �ring rate to adapt. When no spikes are �red, the conductance
decreases exponentially to 0. rm is the speci�c membrane resistance [7]. This model is
very simple and can easily be implemented in neuromorphic hardware which allows the
implementation of large networks of spiking neurons in small, light-weighted and low-power
chips [18] [9].
1.2 Associative Learning
Most animals have the ability to associate a reward or punishment with a stimulus and to
learn the proper action in response. This process of learning is called associative learning
and is typically tested in paradigms of classical conditioning and operand conditioning.
In classical conditioning schemes a response to a stimulus is reinforced until the stimulus
itself can elicit the response without the reinforcement. In operand conditioning actions
of the animals determine the way reinforcements are administered, which in�uences the
probability of actions being repeated [7]. An example of a well studied associative learning
paradigm using classical conditioning is the proboscis extension response of honeybees to
olfactory stimuli paired with a sugar reward [4] [16].
A Model of the Olfactory Learning in Insects
Figure 1 shows a network model of olfactory learning in Drosophila [20]. Odours are detected
by the olfactory receptor neurons (ORN), and when stimulated they project the input to
the antennal lobe projection neurons (PN). The PN excite the mushroom body intrinsic
neurons, the Kenyon cells (KC). The KC supposedly serve as a coincident detector and will
3

&%'$
&%'$
&%'$
&%'$&%'$&%'$
&%'$
&%'$
&%'$
ORN &%'$&%
'$&%'$
&%'$
PN
&%'$
&%'$&%'$&%'$
&%'$
KC &%'$EN
OCT
�����
����*
-
���
���
���*
�����
���
��*
HHHHHH
HHHHj
- -6
Figure 1: Overview of the Drosophila olfactory learning network structure. The olfactory receptor
neurons (ORN) project to the antennal lobe projection neurons (PN) that excite the Kenyon cells (KC) in
the mushroom body. Their output then converges to a few extrinsic neurons (EN). Spike timing-dependent
plasticity (STDP) with reinforcement signals such as Octopamin (OCT), modulates plasticity in KC-EN
synapses and creates a learning mechanism. Inspired by a network model presented by Wessnitzer et
al.(2012) [20].
�re depending on how many PN �re. The output from the KC excites the mushroom body
extrinsic neurons (EN). The implementation of the associative learning rule of the synapses
between KC and EN combines Hebbian spike timing dependent plasticity (STDP) and
dopaminergic or octopaminergic reward [5]. This is done through conditionally modulated
synapses, i.e. the synaptic weights change only when a reward is presented:
∆w = e(t) ·OCT · α (3)
w(t+ 1) = w(t) + (1− w(t)) ·∆w. (4)
Here, OCT is the octopaminergic signal, that is either 0 or 1, depending on whether the
reward is presented or not, and α is the learning rate. The eligibility trace e(t) serves as a
memory state variable. It increases with each spike by:
e(t+ 1) = e(t) + (1− e(t)) · αe (5)
4

but decreases exponentially when no spikes are �red:
e(t+ 1) = e(t) · exp(−∆t
τe). (6)
The eligibility increases with each spike by αe, and τe is the eligibility time constant, which
determines how fast it decreases when no spikes are �red.
1.3 Neurorobotics
Neurorobots are robotic devices that are equipped with control systems based on principles
of nervous systems. They are used as a tool for modelling and simulating neuronal function
and behaviour in a real environment. Neurorobots can help us in understanding questions
pertaining to neuroscience, unlike biologically inspired robotics, which draws inspiration
from biology to improve robotic technology [10].
Neurorobots using SNN are few and mainly focus on primary sensory processing or simple
motor control. Although a lot of research and simulations of SNN paradigms that could be
tested in robotics have been done [17], implementing and testing these paradigms has in
many cases not been done due to many limiting factors. One is the lack of a simple interface
between SNN simulators and robotic platforms. Another is the lack of inexpensive robotic
platforms for neurorobotic research.
Custom made neurorobots, like theWhiskerbot and SCRATCHbot [13], use reprogrammable
Field Programmable Gate Arrays (FPGA) to run detailed spiking neural networks on-
board the robot. Webbs' cricket robot [19] uses a leaky-integrate-and-�re neural model
of phonotaxis in crickets. It has an analogue electronic auditory system that converts an
auditory input into spikes, that are fed into a SNN simulator. It is important to point
out that no learning is implemented on-board the aforementioned robots. In 2009 Cox and
Krichmar presented a robot control using neuromodulation inspired by the mammalian
brain [6]. However, they used a mean �ring rate neural model instead of a spiking neural
model.
5
2 Platform Development
In this section a platform is presented, which uses a SNN simulator to control a small
tracked robot. The robot is equipped with a camera, a light sensor and a temperature
sensor that are used to gather real time sensory information about the environment. The
sensory input is then sent via WiFi to the SNN, which processes it and sends it output to
the motors of the robot. The platform is inexpensive yet versatile as well as simple and
easy to set up and use.
2.1 iqr - Spiking Neural Network Simulator
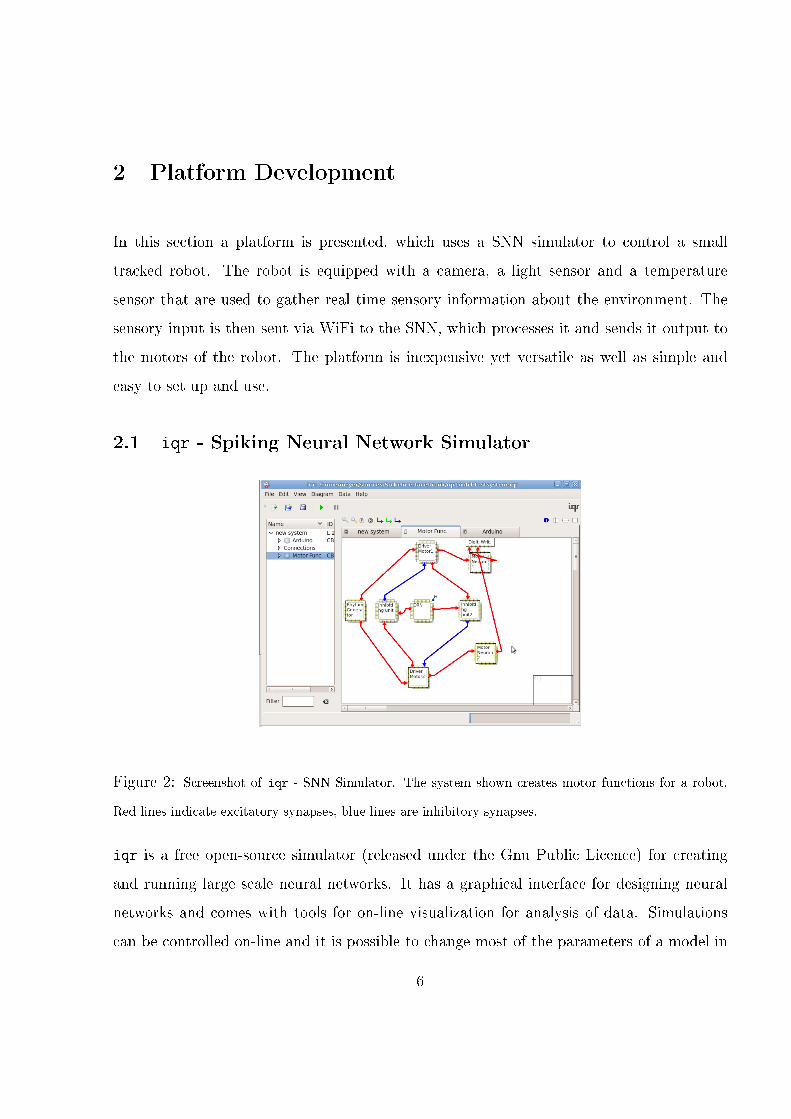
Figure 2: Screenshot of iqr - SNN Simulator. The system shown creates motor functions for a robot.
Red lines indicate excitatory synapses, blue lines are inhibitory synapses.
iqr is a free open-source simulator (released under the Gnu Public Licence) for creating
and running large scale neural networks. It has a graphical interface for designing neural
networks and comes with tools for on-line visualization for analysis of data. Simulations
can be controlled on-line and it is possible to change most of the parameters of a model in
6
run-time. Most importantly, for the purpose of this project, it has an open architecture,
which makes extensions for our needs possible. We can therefore write our own models for
neurons and synapses and create interfaces to real world hardware like robots and sensors.
Models in iqr are organized into di�erent levels. Top level is the system, which contains an
arbitrary number of processes and connections between processes. Each process consists of
an arbitrary number of groups. Each group consists of neurons of identical type arranged
in a speci�c topology. Connections between groups are de�ned as a collection of synapses
of identical type. The connecting synapses can be excitatory, inhibitory or modulatory
and their connectivity is comprised of how the pattern and the arborization are de�ned.
The pattern de�nes pairs of points in the lattice of the pre- and post-synaptic group. The
arborization determines whether the connection is formed as a receptive �eld or a projective
�eld and is applied to every pair of points de�ned by the pattern [3].
Conditional Plasticity
One of the goals of this project was to implement a model of conditional plasticity in in-
sects (see chapter 1.2) and integrate it onto the robotic platform, so its principles could
be used in a associative learning paradigm. The model required the adaptive IFN model
as describe in equation 2 and modulatory synapses based on the Hebbian learning rule as
described in equations 3 and 4. Because the adaptive IFN had already been implemented in
iqr by the former group member Jan Meyer [12], it was only necessary to add a modulatory
feedback parameter to the neuron module. The design of iqr requires the reinforcement
to be directly applied to a neuron group via modulatory connections. The information is
stored as a parameter that can be accessed by synapses that are supposed to be modulated.
The modulatory connection from the reinforcement to the neuron group is not the same as
the synapses that will be modulated and it has no e�ect on the output of the connected
neuron group. The synapses that will be modulated can either be excitatory or inhibitory,
but they do not a�ect the neuron group until after reinforcement is applied.
7

A synapse module whose weights could be modulated with a reinforcement input during
simulation had not been implemented in iqr before. The synapseModulateFeedback mod-
ule was created for this purpose. During a simulation, the modulatory feedback from each
neuron group is read in every cycle. Before the reinforcement is administered the synapses
show no activity for any stimulus. Any pre-synaptic activity is integrated into the eligi-
bility trace as described in equations 5 and 6. During reinforcement the variable OCT is
changed from 0 to 1. If the reinforcement occurs when the pre-synaptic activity is non-zero
the weights are changed as described by equation 3. Once a certain stimulus has been
reinforced, the synapses will excite or inhibit the post-synaptic neuron group every time
the reinforced stimulus is presented but will be quiet for all other stimuli.
2.2 Arduino - A Robotic Platform
Arduino is an inexpensive open source microcontroller board, designed to make the use of
electronics easy and accessible to all. A large community of users exists and the community
is well supported. Many o�cial and non-o�cial accessories and shields are available making
it an exciting board to work with.
Arduino Duemilanove
The microcontroller board used is the Arduino Duemilanove board. It features a AT-
Mega328p microcontroller, 14 digital I/O pins, six analog inputs, a USB connection and a
power jack. Six of the digital I/O pins can provide a 8-bit PWM output (pins 3,5,6,9,10,11).
The Arduino Duemilanove provides serial communication which is available on digital pins
0 (Rx) and 1 (Tx). The FTDI FT232RL chip on the board channels this serial communica-
tion over the USB connection to a PC. A DfRobot WiFi Shield v. 2.1 for Arduino was used
for wireless serial communication between the board and the PC. The library SoftwareSerial
was used for communicate serially with devices attached to the digital pins of the Arduino
Duemilanove board [2]. A summary of the features of the Arduino Duemilanove is given in
table 1.
8
(A) (B)
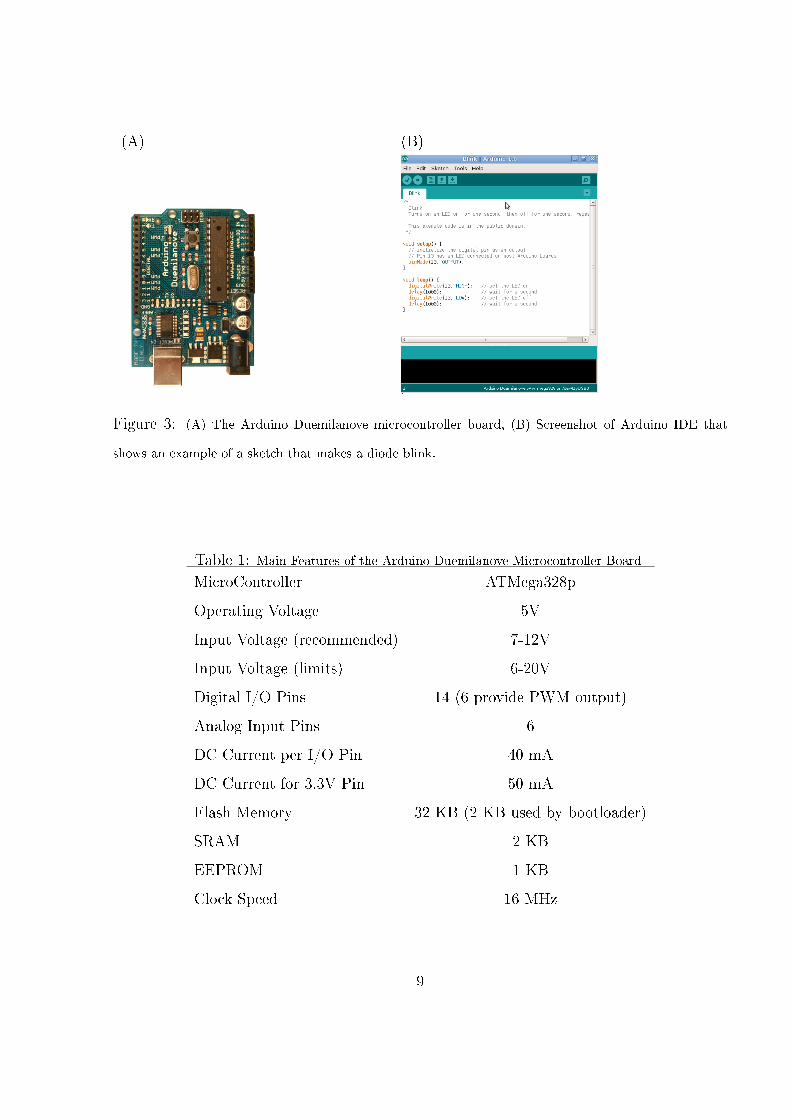
Figure 3: (A) The Arduino Duemilanove microcontroller board, (B) Screenshot of Arduino IDE that
shows an example of a sketch that makes a diode blink.
Table 1: Main Features of the Arduino Duemilanove Microcontroller Board
MicroController ATMega328p
Operating Voltage 5V
Input Voltage (recommended) 7-12V
Input Voltage (limits) 6-20V
Digital I/O Pins 14 (6 provide PWM output)
Analog Input Pins 6
DC Current per I/O Pin 40 mA
DC Current for 3.3V Pin 50 mA
Flash Memory 32 KB (2 KB used by bootloader)
SRAM 2 KB
EEPROM 1 KB
Clock Speed 16 MHz
9

Table 2: Important functions and libraries that are commonly used in an Arduino sketch
Name Function
pinMode() Con�gure speci�ed pins to be INPUT or OUTPUT
digitalWrite() Write to a speci�ed digital pin, either HIGH or LOW
digitalRead() Read a speci�ed digital pin, either HIGH or LOW
analogWrite() Write an analog value to a PWM pin
analogRead() Read from analog pins. The input range and resolution
can be changed using analogReference()
Serial Used for serial communication between the Arduino
board and a computer or other devices.
SoftwareSerial Used for serial communication between the Arduino
board and serial devices connected to other digital pins
than 0 and 1.
The Arduino Duemilanove microcontroller board was programmed using the Arduino IDE,
which is a cross-platform application written in Java. Arduino programs or sketches are
written in C/C++, but users only need to de�ne two functions:
• setup() - a function that initializes variables, pin modes and libraries. It's executed
once at the start of a sketch.
• loop() - a function that is called repeatedly until the board powers o�.
Other important functions and libraries that are commonly used in an Arduino sketch are
shown in table 2.
DfRobotShop Rover
The DfRobotShop Rover is a versatile mobile robotic tank based on the Arduino Duemi-
lanove microcontroller board. Including the standard Arduino Duemilanove board, the
DfRobotShop Rover features a Tamiya Twin Motor Gearbox,a L293 motor driver, a LiPo
battery charger,a mini JST connector, a light sensor and a temperature sensor. The sensors
are connected to analog pins 1 and 2, respectively. The L293 motor driver is connected to
10
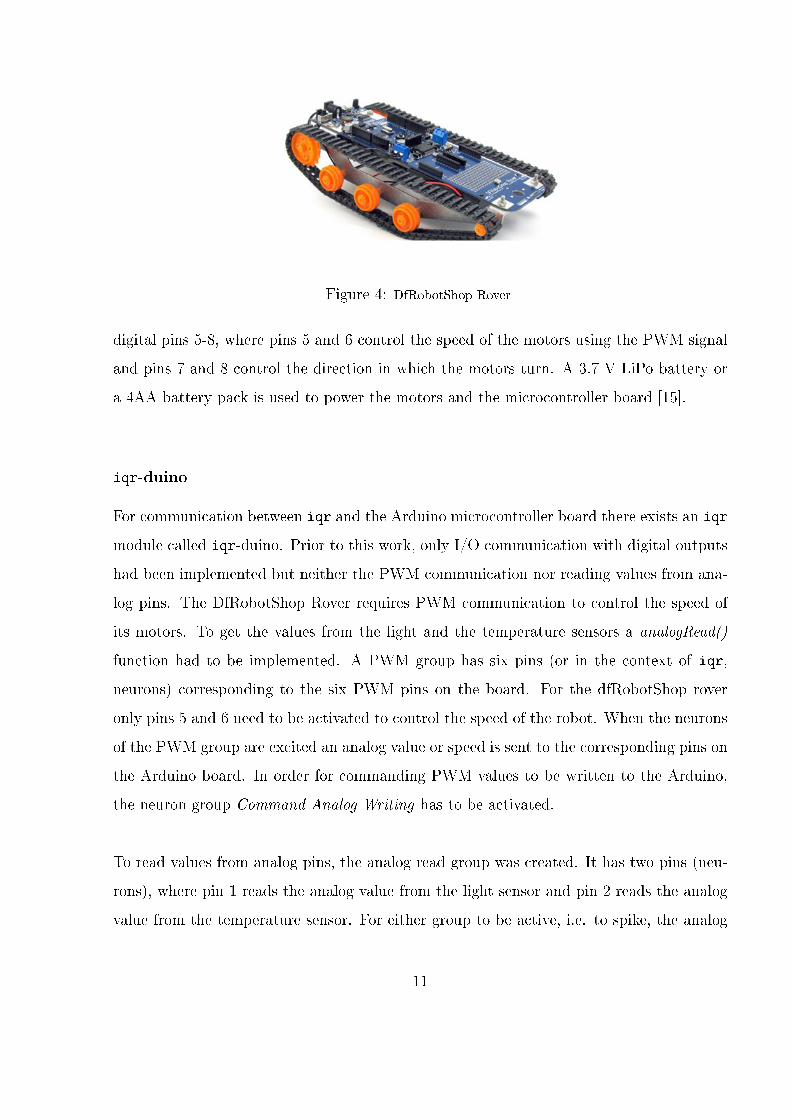
Figure 4: DfRobotShop Rover
digital pins 5-8, where pins 5 and 6 control the speed of the motors using the PWM signal
and pins 7 and 8 control the direction in which the motors turn. A 3.7 V LiPo battery or
a 4AA battery pack is used to power the motors and the microcontroller board [15].
iqr-duino
For communication between iqr and the Arduino microcontroller board there exists an iqr
module called iqr-duino. Prior to this work, only I/O communication with digital outputs
had been implemented but neither the PWM communication nor reading values from ana-
log pins. The DfRobotShop Rover requires PWM communication to control the speed of
its motors. To get the values from the light and the temperature sensors a analogRead()
function had to be implemented. A PWM group has six pins (or in the context of iqr,
neurons) corresponding to the six PWM pins on the board. For the dfRobotShop rover
only pins 5 and 6 need to be activated to control the speed of the robot. When the neurons
of the PWM group are excited an analog value or speed is sent to the corresponding pins on
the Arduino board. In order for commanding PWM values to be written to the Arduino,
the neuron group Command Analog Writing has to be activated.
To read values from analog pins, the analog read group was created. It has two pins (neu-
rons), where pin 1 reads the analog value from the light sensor and pin 2 reads the analog
value from the temperature sensor. For either group to be active, i.e. to spike, the analog
11

values need to cross a prede�ned threshold.
The moduleArduinoAnalog consists of six input groups and two output groups. The topol-
ogy of neuron groups Digital Read and Digital Write are de�ned so that each process has
twelve neurons corresponding to the twelve digital pins on the Arduino board. The pins 0
and 1 are not used as they are busy with the serial communication between the iqr and
the Arduino board. Table 3 describes the groups and their function.
2.3 HaViMo - Vision Processing Module
Figure 5: HaViMo 2.0, scale is in cm
HaViMo is a vision processing module that is ideal
for low power microcontrollers. It is equipped with
a CMOS camera chip and a microcontroller which
performs the image processing. The results are then
accessed via serial port, either in a half-duplex or
full-duplex mode. The module supports two di�erent
color-based image processing algorithms, i.e. online
region growing and gridding. Online region growing
detects contiguous color blobs in the image, while the
gridding algorithm compresses the image to 32x24
grids and detects the primary color in each grid. The
camera chip needs to be pre-con�gured for the color of the object which is supposed to be
detected, as well as for the illumination in which the color recognition task is to be per-
formed in. The pre-con�gured colors are then stored in a look-up-table that is �ashed onto
the camera chip, so there is no need to recalibrate after power on [14].
Connecting Arduino and HaViMo was done by adding a permanent shortcut to the half
duplex side to make sure it was in full-duplex mode. Then the voltage regulator was
jumped by soldering a power line onto the camera chip directly so that the camera would
get su�cient input voltage from the Arduino board. The power line was connected to the
12

Table 3: The moduleArduinoAnalog input and output groups and their functionality
Output groups
Command Digital Writing Send a value di�erent than 0 to the cell assigned to the
pin which are supposed to be accessed.
Command Digital Reading Send a value di�erent than 0 to each of its 12 cells in
order to command a digital reading of its assigned pin
(�rst cell belongs to pin 2; last one to pin 13).
Digital writing Once writing is commanded, this group manipulates the
output value.
Command Analog Writing Send a value di�erent than 0 to the cell assigned to the
pin which you want to access in PWK mode.
Analog Writing Once writing is commanded, this group manipulates the
output value.
Command Analog Reading Send a value di�erent than 0 to each of its 2 cells in order
to command an analog reading of its assigned pin (cell
1 belongs to the light sensor; cell 2 to the temperature
sensor ).
Input groups
Digital Reading Once reading is commanded, the input value will be pre-
sented as activity in this group.
Analog Reading Once analog reading is commanded, the input values
over threshold de�ned by the light sensitivity parameter
will be presented as activity in this group.
13

5V pin on the Arduino board and the ground of the camera was connected to the GND pin.
The Rx and the Tx of the camera were connected to digital pins 2 and 3 on the Arduino
board, de�ned as Tx and Rx, respectively. To make the HaViMo interact with the Arduino,
I created a library havimo for Arduino (Appendix B.2), that uses the SoftwareSerial library,
and implements all the basic commands easily. The function captureRegion() is called to
capture the image and to �nd regions within the image containing the precon�gured color.
These regions are then stored on the camera chip in the address range 0x10 to 0xFF and
can be read with the command readRegion() .
2.4 Wireless Communication
Communication between iqr and the Arduino board is done via wireless connection. A
DfRobot WiFi shield v. 2.1 for Arduino is used. How to set up the WiFi shield is described
in appendix A.1. Once the connection between a workstation and the Arduino board has
been established, it is easy to communicate with the Arduino, e.g. through a terminal
using netcat, depending on the sketch running. The Arduino board reads the data from
the computer with Serial.read() and sends out data using Serial.write() or Serial.print(),
one byte at a time. The con�guration for the wireless connection between the Arduino and
a PC running linux OS (i.e. Ubuntu 10.04) are described in appendix A.2.
Virtual Serial Port
Serial communication between Arduino sketches and iqr is quite simple. Therefore, a
virtual serial port is created through which the communication between the Arduino board
and iqr takes place, using the program utility socat. Socat is a command-line based utility
that establishes two bidirectional byte streams and transfers data between them [1]. To
establish a stable communication the following command is run:
socat -d -d -d -x -s -t 30 TCP4:192.181.10.100:4000,reuseaddr
PTY,raw,ispeed=115200,ospeed=115200,echo=0,onlcr=0,iexten=0,echoctl=0,
echoke=0,sane
14
This creates a virtual serial port on the workstation, e.g. /dev/pts/0 in Ubuntu. Further
details of the virtual serial port are in appendix A.3.
2.5 A Robotic Platform Controlled by a SNN Simulator
?
6
RX/TXVirtual SerialPort\dev\pts\2
��
��
���������
WiFi
(TCP)
HHHHH
HYHH
HHHHjSerial
comm.
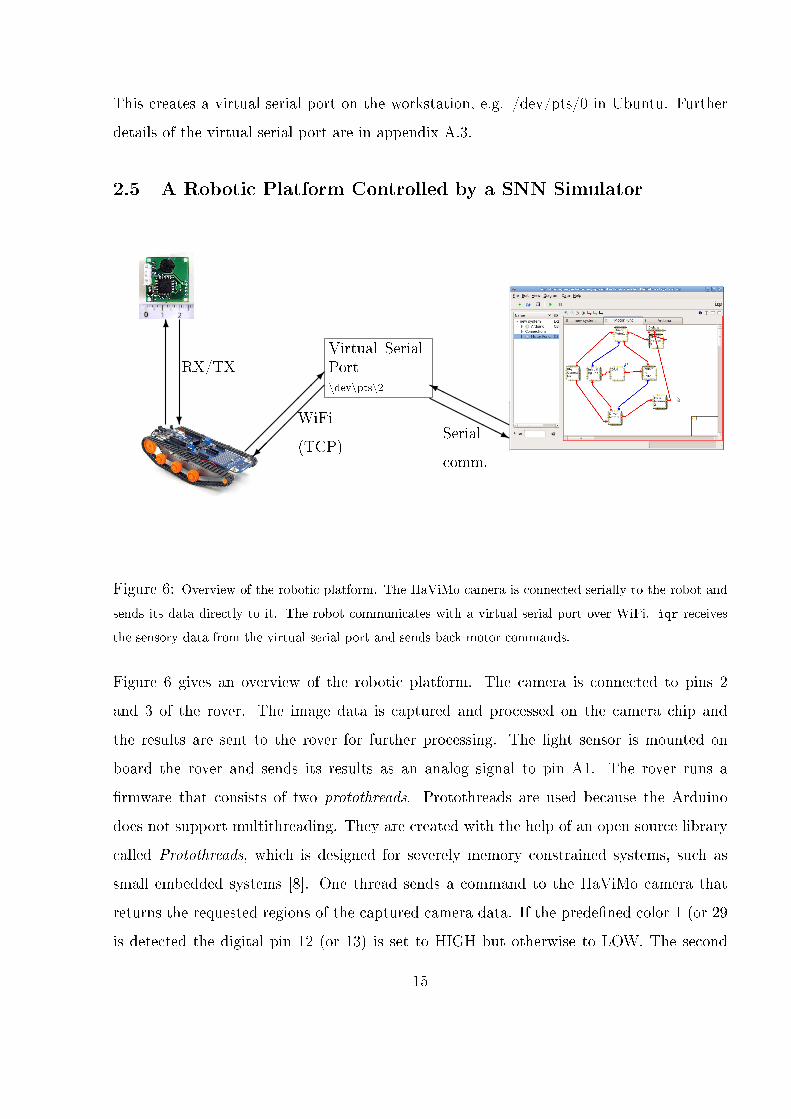
Figure 6: Overview of the robotic platform. The HaViMo camera is connected serially to the robot and
sends its data directly to it. The robot communicates with a virtual serial port over WiFi. iqr receives
the sensory data from the virtual serial port and sends back motor commands.
Figure 6 gives an overview of the robotic platform. The camera is connected to pins 2
and 3 of the rover. The image data is captured and processed on the camera chip and
the results are sent to the rover for further processing. The light sensor is mounted on
board the rover and sends its results as an analog signal to pin A1. The rover runs a
�rmware that consists of two protothreads. Protothreads are used because the Arduino
does not support multithreading. They are created with the help of an open source library
called Protothreads, which is designed for severely memory constrained systems, such as
small embedded systems [8]. One thread sends a command to the HaViMo camera that
returns the requested regions of the captured camera data. If the prede�ned color 1 (or 29
is detected the digital pin 12 (or 13) is set to HIGH but otherwise to LOW. The second
15

thread receives commands serially from iqr over the virtual serial port and sends back the
proper response, e.g. reading the status of a pin (either digital or analog) or writing to a
pin (either 1 or 0 or a PWM signal). The data is fed to the SNN being simulated in iqr
over the wireless connection, and the output of the network is sent back to the robot as
motor control commands, i.e. Analog Writing to pins 5 and 6.
Before starting a simulation, a few steps need to be taken. Once the robot has been turned
on, it is advisable to see whether the protothreads are working correctly and whether the
camera has booted up in the right mode. A LED can be mounted to pin 12 (or 13) to
get visual feedback on whether the HaViMo thread is running, and if it is detecting the
color de�ned as color 1 (or 2). If the LED blinks the thread is working correctly. Then
the virtual serial port is created on the workstation using socat in a terminal (see chapter
2.4). This will make the LED stop blinking, since now the second protothread is waiting
for input, which it will not receive until the iqr simulation starts.
Adding the Arduino process to the SNN is done graphically in iqr. First the module Ar-
duinoAnalog is selected, and it consists of eight groups as described in table 3. Even though
not all groups will be used during a simulation, they must all be in place. However, there is
no need to activate the unused groups. The serial device selected has to be the virtual serial
port that was created (eg. /dev/pts/2). The parameters Analog Write, which controls the
speed of the robot, and light sensitivity, which controls the threshold of illumination, must
be set to appropriate values.
The output from the group Digital Reading and/or the group Analog Reading can be used
as a sensory input to the network, depending on whether the sensory input is supposed to be
light and/or camera data. Before it is possible to read sensory data, the groups Command
Digital Reading and Command Analog Reading must be activated for the corresponding
pins. The output of the network should be sent to pins 5 to 8, where the speed is controlled
by the group Analog Writing that must write to pins 5 and 6. The rotation is controlled by
the group Digital Writing that writes to pins 7 and 8. LOW is clockwise, HIGH is counter-
16

clockwise. In the current implementation the speed must be set before the simulation starts.
It must be in the range between 0 and 255, and can only be changed manually during the
simulation. If the rotation of the motors of the robot are supposed to be the output, the
speed must also be activated. Otherwise the robot does not turn the motors. The output
of the SNN is only sent to the robot if the groups Command Digital Writing and Command
Analog Writing are activated.
Limits
There are some limitations to the platform, that in�uence its performance. The number of
synapses and the amount of spikes being propagated through the network determine the
maximum network size for real-time simulation. Based on the employed network structure,
this limit was around 10000 neurons and connections, as the simulations were supposed to
run at 1000 cycles per second (Intel i7, 2.50 GHz).
The HaViMo camera needs about 300 - 500 ms to capture, process and send the data. This
results in a delay for the sensory data to reach the network, which has an e�ect on the
network performance, that accumulates over time.
Another issue is the power. LiPo batteries do not supply enough current to run the motors,
so the rover moves painfully slowly if they are used. It is also possible to use a 4 AA
battery pack to power the rover. However, they can only power either the motors or the
microcontroller board, but not both at the same time. A temporary solution to this problem
was to power the motors and the microcontroller board separately, powering the motor with
the 4 AA battery pack and the microcontroller board through the USB connector.
17

3 Test Cases
To demonstrate the ability of the robotic platform three di�erent networks were tested;
phototaxis (3.1), where the on-board light sensor was used as sensory input, chromatotaxis
(3.2), where the camera data was used, and associative learning (3.3), where the light sen-
sor, the camera and modulating synapses were combined to perform a simple associative
learning task.
(A)
start
Target
Target
107cm
110cm
55cm
57cm
(B)
Target Target
107cm
110cm
55cm
57cm
Figure 7: Arena measurements and placements of targets. (A) The yellow borders indicate where the
light concentration was above light sensitivity threshold (for phototaxis). The blue and the red targets
were used for the chromatotaxis paradigm. (B) The blue and red lines indicate the placement of targets
for the associative learning test case. As a reward an additional light source was placed near either one of
the target (yellow line).
A small arena was used for testing the robotic platform. The robot was positioned in the
middle of the arena. When the simulation started, it explored the arena looking for its
18

Figure 8: Screenshot of the motor function network. The Rhythm Generator randomly stimulates the
Pre-Motor Neuron groups. When there is no sensory input to the network, each group tries to inhibit
the other one, so that only one Pre-Motor Neuron group can be active at a time. Once sensory input is
presented to the network the inhibition is inhibited and both Pre-Motor Neuron groups can be active at
the same time.
target. In the phototaxis test, a lamp lit up one corner of the arena locally increasing the
light concentration. For the chromatotaxis paradigm either a blue or a red target were
placed on designated spots (see �gure 7(A)). In the associative learning test case, a red and
a blue target were placed as depicted in �gure 7 (B). One of them was used as CS+, the
conditioned stimulus that was paired with the unconditioned stimulus (US). An additional
light source served as US and was placed at near the CS+ object.
Figure 8 shows the network that controlled the motor functions of the robot. It consisted
of a rhythm generator which randomly gave input to two groups of pre-motor neurons that
excited the two motor neurons. They controlled the motors of the robot, sending their
19

output as a PWM signal to pins 5 and 6 on the robot. These two groups of pre-motor
neurons competed for dominance by inhibiting each other so only one group of neurons was
active at a time. This made the robot move and turn either to the right or to the left for
random time intervals, in the order of seconds, throughout the trial. As a consequence the
robot explored the arena. When sensory input was fed to the network the inhibitory neuron
groups of the two pre-motor neurons are inhibited. This lead to both pre-motor neuron
groups being constantly active and the robot moves straight forward towards its target.
The network performed at 1000 cycles per second and the total number of neurons was
293 and total number of connections was 7922 . Numerical details of the motor function
network are in table 4.
In such a small arena, it is highly likely that the robot will accidentally hit its target without
having found the target using the sensory input. Therefore a test was determined successful
when:
1. The robot hit the target and
2. The raster plot of the pre-motor neurons showed that it had sensed the target, i.e.
neither of the pre-motor neuron groups were inhibited (�gure 9).
In order to track the movements of the robot all tests were recorded with a camera.
20

(A)
(B).
Figure 9: Raster plots of the Pre-Motor Neuron Groups and their relative average activity. (A). Without
sensory input, each Pre-Motor Neuron group tries to inhibit the other one, resulting in exclusive activity.
(B) With sensory input. No inhibition and motor are active simultaneously.
21

Table 4: Details of Motor Function Network
Exponential Synapses
Number of Synapses 7922
Weight 1
Time Constant 3 ms
Initalization Probability 0.5
Direction Projection Field
Neurons
Total Number Of Neurons 293
Number Of Neurons In Group 36 \ 144
Neuron Type Adaptive Integrate and Fire
Excitatory Conductance 5.5
Inhibitory Conductance 7.5
Speci�c Membrane Resistance 0.5
Resting Potential -70 mV
Excitatory Potential 0 mV
Inhibitory Potential -100 mV
Threshold Potential -50 mV
Membrane Potential Reset -70 mV
No Adaptation implemented
22

3.1 Phototaxis
Phototaxis is a kind of taxis that occurs when an organism moves in response to a light
stimulus. For detecting a change in the illumination of the arena the on-board light sensor
was used.
Before the start of a trial it was necessary to calibrate the light sensor to adjust for the
speci�c light conditions in the test arena. It is possible to perform this calibration on-line
by changing the light sensitivity parameter inside the Arduino module while running the
simulation. Lower values correspond to higher light sensitivities. In order to make sure that
the robot only detected light coming for the front of its current orientation, but not from
the back or the sides, black tape was used to block light input around all other directions.
Once the light sensor had been calibrated, the robot was placed at the designated starting
position and the Command Analog Writing group was activated for pins 5 and 6.
The trial consisted of the robot moving randomly in one or the other direction until it
sensed light input which was above the pre-calibrated threshold. Once it found an area of
higher light concentration it moved straight until it hit a wall. Ten tests were performed.
Nine were deemed successful as they ended with the robot placed within the borders of the
higher light concentration area and the raster plots of the Pre-Motor Neuron groups showed
no inhibition. One test was deemed unsuccessful after four minutes of continuous running
without the robot �nding the light source. The successful paths the robot took in each case
to �nd the target are shown in �gure 10. The duration of each test case was between 0:15
and 1:30 minutes. When the robot got stuck in one of the corners the robot was moved to
the starting point without stopping the simulation. This had to be done twice for all nine
experiments.
23

0 20 40 60 80 100x position (cm)
0
20
40
60
80
100
y po
sitio
n (c
m)
Figure 10: Path of the robot in the phototaxis test case. The black square indicates the starting position
of the vehicle, and the yellow square shows the part of the arena where the illumination was above threshold.
3.2 Chromatotaxis
Chromatotaxis is the adjustment of movement in response to a color of a speci�c hue. For
the chromatotaxis the HaViMo camera was integrated into the network. The preprocessing
of the camera data was done on the HaViMo chip (see further details in chapter 2.3). The
results were written to pin 13 of the DfRobotShop Rover, so if color was detected, the pin
read HIGH, otherwise LOW. This information was fed into the motor function network
(see �gure 8), using the group Digital Reading in the Arduino module. This served as
sensory input to the motor function network, which sent the output to the Analog Writing
group, pins 5 and 6. Here it was necessary to make some changes to the Arduino module
so it wouldn't interfere with the communication between the camera and the board. Pins
2 and 3 were occupied with serial communication between camera and board so in order to
initialize the other pins for digital reading and analog writing pins 2 and 3 had to be skipped.
Therefore, the group for Digital Reading was of size ten (pins 4-13) and for Analog Writing
only the PWM pins 5,6,9,10,11 were de�ned. This was done to avoid any interference with
the camera. The network was tested on red and blue targets that were placed as shown in
24

�gure 7. Only one target was presented in each trial.
0 20 40 60 80 100x position (cm)
0
20
40
60
80
100
y po
sitio
n (c
m)
Figure 11: Path of the robot in the chromatotaxis test case for the blue target. The black square indicates
the stating position of the vehicle. The blue circle shows the placement of the target.
Figure 11 shows the path the robot took to successfully �nd the blue target for eight di�erent
test cases. Each trial lasted between 0:30 and 1:30 minutes. Success was only recognized
if the robot reached the target and neither motor was inhibited. Figure 12 shows the path
the robot took to �nd the red target. The red target was much larger than the blue one,
and in this small arena the robot often accidentally stumbled upon its target, making it
unclear whether it was because of directed movement or by chance. Therefore, only two
paths are shown in �gure 12, where the robot clearly reached the target and the motor
neuron response was inhibited.
25

0 20 40 60 80 100x position (cm)
0
20
40
60
80
100
y po
sitio
n (c
m)
Figure 12: Path of the robot in the chromatotaxis test case for the red target. The black square indicates
the starting position of the vehicle and the red line the placement of the red target.
3.3 Associative Learning
The associative learning network was based on the model of olfactory learning in drosophila
described in chapter 1.2 and �gure 1, using the camera and light sensor on board the robot
as sensory input. The camera data was con�gured to detect two di�erent colors, that were
used as CS and represented the input to the network. The camera could then be considered
as the ORN and the di�erent colors as di�erent CS. The sensory input was read by the
Digital Reading neuron group which stimulated the PN group, which in turn projected its
output to the KC. The synapses between KC and EN were modulatory. The US was de�ned
as an additional light source, that was activated for a short amount of time in combination
with the CS+. The US signal was read by the Analog Reading group and it entered the
network as the modulatory OCT input to the EN group. The output of the EN inhibit the
inhibitory neuronal group in the motor function network, shown in �gure 8. A screenshot
of the learning network used in the simulation is shown in �gure 13.
Two targets were placed in the arena, a red one in the lower left hand corner and a blue
26
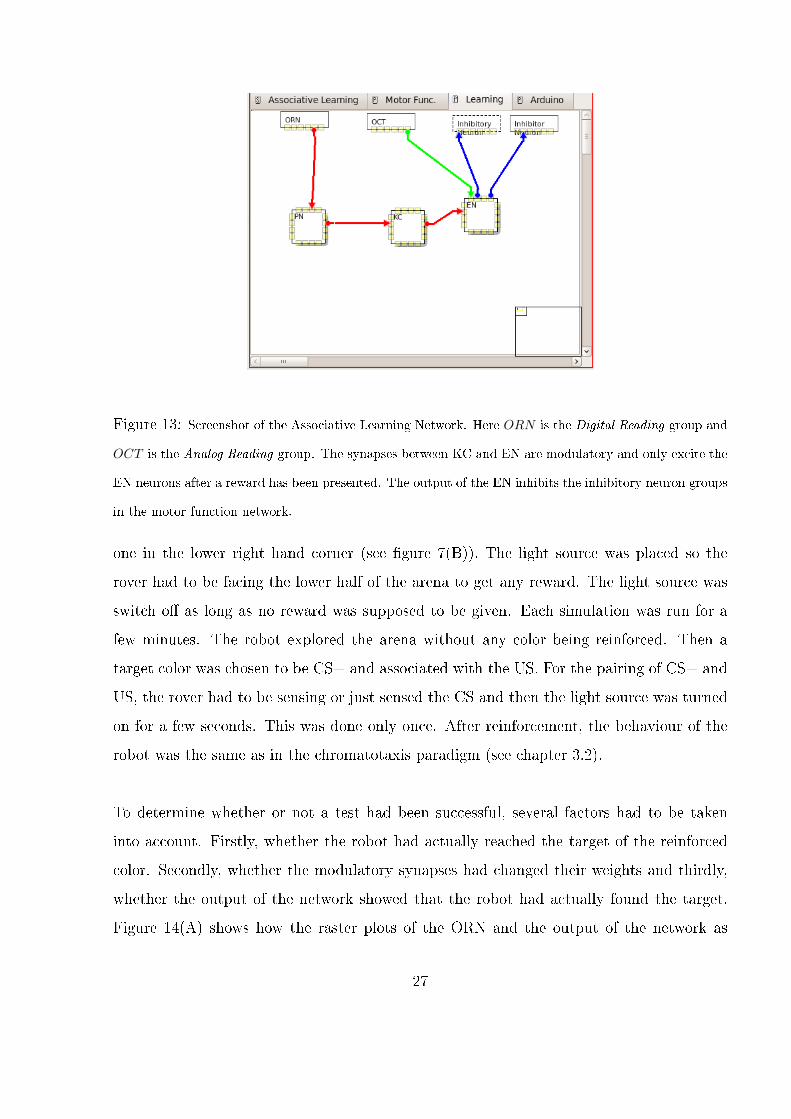
Figure 13: Screenshot of the Associative Learning Network. Here ORN is the Digital Reading group and
OCT is the Analog Reading group. The synapses between KC and EN are modulatory and only excite the
EN neurons after a reward has been presented. The output of the EN inhibits the inhibitory neuron groups
in the motor function network.
one in the lower right hand corner (see �gure 7(B)). The light source was placed so the
rover had to be facing the lower half of the arena to get any reward. The light source was
switch o� as long as no reward was supposed to be given. Each simulation was run for a
few minutes. The robot explored the arena without any color being reinforced. Then a
target color was chosen to be CS+ and associated with the US. For the pairing of CS+ and
US, the rover had to be sensing or just sensed the CS and then the light source was turned
on for a few seconds. This was done only once. After reinforcement, the behaviour of the
robot was the same as in the chromatotaxis paradigm (see chapter 3.2).
To determine whether or not a test had been successful, several factors had to be taken
into account. Firstly, whether the robot had actually reached the target of the reinforced
color. Secondly, whether the modulatory synapses had changed their weights and thirdly,
whether the output of the network showed that the robot had actually found the target.
Figure 14(A) shows how the raster plots of the ORN and the output of the network as
27
well as the connection plots of the connection between KC and EN look like before the
reinforcement had been administrated. In this state, no input to the network a�ected the
output of the network, so the robot randomly explored the arena even though it was able
to sense di�erent colors in the arena. The weights of the modulatory synapses are all down
so no learning had taken place. Figure 14(B) shows the raster plots of the ORN and of the
output of the network as well as the connection plots between KC and EN look like after
the reinforcement had been administrated. Here, the weights of the synapses have changed
and the desired input to the network makes both the motors turn, causing the robot to go
straight.
Figures 15 and 16 show the trail of the robot during two association tasks. Before the
reinforcement is administrated the robot moves in a random fashion, even though it can
sense an input from a target color. Reinforcement was delivered when the robot was facing
the CS+. The path the robot took after a color had been reinforced is shown in �gures 15
and 16 as red and blue ,respectively.
28

(A)
(B)
Figure 14: Screenshots of the raster plots of the ORN input and the motor command outputs (left )and
the connection plots of the modulatory synapses between KC and EN (right). (A) Before association. The
modulatory synapses are at 0 and any input to the network does not a�ect the output of the network. (B)
The modulatory synapses for the red input have been adjusted so that red input changes the output of the
networks and the motors run simultaneously.
29

0 20 40 60 80 100Position (cm)
0
20
40
60
80
100
Posi
tion
(cm
)
Figure 15: Path of the robot in an associative learning task. Here the color red was reinforced. The
path is shown in red after the reinforcement had been administrated.
0 20 40 60 80 100Position (cm)
0
20
40
60
80
100
Posi
tion
(cm
)
Figure 16: Path of the robot in an associative learning task. Here the color blue was reinforced. The
path is shown in blue after the reinforcement had been administrated.
30

4 Conclusions and Future Work
In the work at hand, a new and inexpensive platform that uses a SNN simulator to control
a robot was presented. It is easy to set up and use. The on-board light sensor and the
added HaViMo camera provide real-time sensory information that can be fed into a SNN
simulator. The simulated network is then used to as a control architecture for the robot.
The three test cases presented, phototaxis, chromatotaxis and associative learning, were
all executed successfully in a small arena, with the robot readily approaching its targets in
most trials.
The motor function network did not follow any exploration algorithm, but created random
activity in either of the motors, when no sensory input was presented, but simultaneous
activity in the presence of sensory input. When the robot lost sight of its target, it would
again move randomly in some direction. This sometimes lead to the robot moving away
from the target after it had sensed it, even if it had lost sight of it only for a short amount
of time. This made it sometimes hard to realize if the robot had actually found the target
or not, without reading raster plots of the output of the network.
In the phototaxis test case illuminated above threshold in only one corner of the arena,
while the rest of the arena was lit subthreshold. The current network versions does not
allow for a representation of gradual changes of the external illumination. Therefore, the
robot had to stumble upon the edges of the corner by accident to sense the higher light
concentration. To make it more likely for the robot to accidentally �nd the edges of the
corner, the robot was placed with the edge on the right side of it so there was a 50% chance
of the robot to turn initially the right way. In one case the robot never found the edge
of the higher illuminated corner by accident and after four minutes of trial and error the
simulation was stopped.
31

For the chromatotaxis test case the red target turned out to be too big, which resulted
in the robot often reaching it without purposely approaching it. Finding the blue target
proved to be successful in every case that was tested. A correct calibration of the camera
was the most important aspect in the chromatotaxis test case. A small amount of pixels in
the captured image were su�cient to detect a color in the image. This could lead to some
small patches of pixels not belonging to a target being detected erroneously and undesirably
in�uencing the behaviour of the robot. This could be avoided by adding a error detection
to the Arduino �rmware, but this has not yet been implemented.
The associative learning test case showed how powerful indeed the platform is. By combin-
ing sensory input from the light sensor and the camera and adding a learning rule based
on the model of the olfactory learning in insects, we could make the robot associate a color
(CS) with a reward (US). The synchronization of a stimulus and a reward was the biggest
challenge. When it was correctly executed, the robot showed the expected behaviour. How-
ever, the real-time processing of the sensory data is limited to the processing power of the
workstation running the simulation. Although the delay between sensory input and the
output of the network reaching the motors of the robot was only about a second, it could
cause the robot to move slightly away from its target.
This platform opens up many opportunities to test di�erent SNN models of learning and
memory, using robots. Adding prede�ned motivational states and testing out biologically
inspired exploration algorithms would be an interesting next step to apply the abilities
of the platform. This platform could also be used to create a control SNN for the robot
which starts learning with minimal knowledge about the environment. Another option is
to create and test networks for operand conditioning, where certain actions are reinforced.
The real time processing of the sensory data limits the number of neurons and connections
of a network, reducing its potential computational power. This makes it hard to mimic
the information processing of biological system, but with faster computers, more realistic
simulations can be performed.
32

References
[1] Socat. http://www.dest-unreach.org/socat/doc/socat.html, Dec 2011.
[2] Arduino duemilanove. http://arduino.cc/en/Main/, June 2012.
[3] Ulysses Bernardet and Paul Verschure. iqr: A tool for the construction of multi-level
simulations of brain and behaviour. Neuroinformatics, 8:113�134, 2010.
[4] M.E. Bitterman, R. Menzel, A Fietz, and S. Schäfer. Classical conditioning of proboscis
extension in honeybees (apis mellifera). Journal of comparative psychology, 97(2):107�
119, June 1983.
[5] Stijn Cassenaer and Gilles Laurent. Conditional modulation of spike-timing-dependent
plasticity for olfactory learning. Nature, Jan 2012.
[6] Brian R. Cox and Je�rey L. Krichmar. Neuromodulation as a robot controller: A brain
inspired strategy for controlling autonomous robots. IEEE Robotics and Automation
Magazine, 16(3):72�80, 2009.
[7] Peter Dayan and L.F. Abbott. Theoretical Neuroscience: Computational and Math-
ematical Modeling of Neural Systems. The MIT Press, Cambridge, Massachusetts,
2001.
[8] Adam Dunkels, Oliver Schmidt, Thiemo Voigt, and Muneeb Ali. Protothreads: Simpli-
fying event-driven programming of memory-constrained embedded systems. In Proceed-
ings of the Fourth ACM Conference on Embedded Networked Sensor Systems (SenSys
2006), Boulder, Colorado, USA, November 2006.
[9] Hani Hagras, Anthony Pounds-Cornish, Martin Colley, Victor Callaghan, and Gra-
ham Clarke. Evolving spiking neural network controllers for autonomous robots. In
Proceedings of the 2004 IEEE International Conference on Robotics and Automation,
pages 4620�4626, 2004.
[10] Je�ery L. Krichmar. Neurorobotics. Scholarpedia, 3(3):1365, 2008.
33

[11] Wolfgang Maass. Pulsed Neural Networks, chapter Computing with spiking neurons.
WA:Bratford Books, 1999.
[12] Jan Meyer, Joachim Haenicke, Tim Landgraf, Michael Schmuker, Raúl Rojas, and
Martin Nawrot. A digital receptor neuron connecting remote sensor hardware to spik-
ing neural networks. Frontiers in Computational Neuroscience, (00164).
[13] Ben Mitchinson, Martin J. Pearson, Anthony G. Pipe, and Tony J. Prescott. Neu-
romorphic and Brain-Based Robots, chapter Biometric robots as scienti�c models: a
view from the whisker tip. Cambridge Univesity Press, 2011.
[14] Hamid Moballegh. HaViMo2 - Image Processing Module, March 2010.
[15] RobotShop Inc., www.RobotShop.com. DfRobotShop Rover User Guide v2.1, Jan 2012.
[16] J. C. Sandoz. Behavioral and neurophysiological study of olfactory perception and
learning in honeybees. Frontiers in systems neuroscience, 5, January 2011.
[17] S. Soltic and N. Kasabov. System and Circuit design for Biologically-Inspired Intel-
ligent Learning, chapter A Biologically Inspired Evolving Spiking Neural Model with
Rank-Order Population Coding and a Taste Recognition System Case Study. Medical
Information Science Reference, 2011.
[18] Jilles Vreeken. Spiking neural networks, an introduction. Technical report, Institute
for Information and Computing Sciences� Utrecht University, 2002.
[19] Barbara Webb. Animals versus animats: Or why not model the real iguana? Adaptive
Behavior - Animals, Animats, Software Agents, Robots, Adaptive Systems, 17(4):269�
286, August 2009.
[20] Jan Wessnitzer, Joanna M. Young, J. Douglas Armstrong, and Barbara Webb. A model
of non-elemental olfactory learning in drosophila. J. Comput. Neurosci., 32(2):197�212,
April 2012.
[21] WIZnet Co Ltd. WizFi210/220 User Manual, v1.0 edition, March 2011.
34
A Wireless Communication
A.1 Setting up the DfRobot WiFi Shield v. 2.1 for Arduino
First we must set up the WiFi shield so it can establish a serial-to-WiFi connection between
robot and PC. We put the WiFi Shield in USB mode and connect it to the PC. I use C-
Kermit, a combined network and serial communication software package.
kermit -l /dev/ttyUSB0
This command makes a connection on the given serial communications device. After that,
I have to initialize how the connection is supposed to be made and make sure the baudrate
is 115200:
set flow-control none
set carrier-watch off
set speed 115200
set reliable
fast
set prefixing all
set file type binary
set receive packet-length 4096
set send packet-length 4096
set window-size 5
connect
After connecting to the shield it is possible to con�gure it to our preferences with AT
commands:
at % Check if connected
35

[OK]
at+wwpa=dfrobot %Set passphrase
[OK]
at+ndhcp=0 % Disable dchp
[OK]
at+nset=192.168.10.101,255.255.0.0,192.168.10.1
%Set Static IP, Subnet Mask, Gateway.
[OK]
at+wauto=1,Arduino,,3
%<mode>,<SSID>,<BSSID>,[channel] , mode 1 Ad-hoc
[OK]
at+nauto=1,1,,4000
%<Type>,<Protocol>,<DestinationIP>,<Destination Port>
[OK]
at&w0 %Save Settings
[OK]
ATA % Connect Automatically
IP SubNet Gateway
192.168.10.101: 255.255.0.0: 192.168.10.1
[OK]
And then the WiFi shield is connected [21].
36

A.2 WiFi Con�guration for Ubuntu
Table 5: Con�guration of the Wireless connection between Arduino and PC (UBUNTU select Edit
Connection)
SSID Arduino
Mode Ad-Hoc
Wireless security none
IPv4 settings:
Address 192.181.10.100
Netmask 255.255.255.0
Gateway 192.181.10.xxx
37

A.3 Socat Commands
To create a virtual serial port the following command is executed:
socat -d -d -d -x -s -t 30 TCP4:192.181.10.100:4000,reuseaddr
PTY,raw,ispeed=115200,ospeed=115200,echo=0,onlcr=0,iexten=0,echoctl=0,
echoke=0,sane
Table 6: Socat commands and explanation [1]
Command Explanation
-d -d -d -d Prints fatal, error, warning, notice, info, and debug msg.
-x Writes the transferred data to target stream and stderr.
-s With this option, socat is sloppy with errors and tries
to continue.
- t 30 Waits 30 seconds before terminating.
TCP4:< host >:< port > Connects to < host >] on < port > using IPv4 protocol.
reuseaddr Allows other sockets to bind to an address even if parts
of it (e.g. the local port) are already in use by socat.
PTY Establishes communication with the sub process using
a pseudo terminal instead of a socket pair
raw Raw mode, passing I/O almost unprocessed.
ispeed Set the baud rate for incoming data on this line.
ospeed Set the baud rate for outgoing data on this line.
echo Enables or disables local echo.
onlcr Translate newline to carriage return-newline.
iexten Enable non-POSIX special characters.
echoctl Echos control characters in hat notation.
echoke Kill all line by obeying the echoctl settings.
sane Brings the terminal to a useful default state.
38

B Code
B.1 Arduino Firmware
1 // S e r i a l I n t e r f a c e wi th th read ing
2 // Author : Lovisa Irpa He l g ado t t i r
3 #include <So f twa r eS e r i a l . h>
4 #include <havimo . h>
5 #include <pt . h>
6
7 // Havimo
8 #define rxPin 2
9 #define txPin 3
10 HaViMo havimo ( rxPin , txPin , 1 1 5200 ) ;
11
12 // Def in ing Threads
13 stat ic struct pt pt1 , pt2 ;
14
15 // I n s t r u c t i o n s
16 int const PIN_MODE = 0 ;
17 int const DIGITAL_READ = 1 ;
18 int const DIGITAL_WRITE = 2 ;
19 int const ANALOG_REFERENCE = 3 ;
20 int const ANALOG_READ = 4 ;
21 int const ANALOG_WRITE = 5 ;
22
23 // Constants
24 int const H = 1 ;
25 int const L = 0 ;
26 byte com , pin , s ta r t , va lue ;
27
28 stat ic int s e r i a l I n t e r f a c eTh r e ad ( struct pt ∗pt ){ // S e r i a l i n t e r f a c e thread
39

29 PT_BEGIN( pt ) ;
30 i f ( S e r i a l . a v a i l a b l e ()>0){
31 s t a r t=getCommand ( ) ;
32 while ( s t a r t !=0){ s t a r t=getCommand ( ) ; }
33 S e r i a l . p r i n t ( s t a r t ) ;
34 com=getCommand ( ) ;
35 S e r i a l . p r i n t (com ) ;
36 s t a r t=getCommand ( ) ;
37 S e r i a l . p r i n t ( s t a r t ) ;
38 pin=getCommand ( ) ;
39 S e r i a l . p r i n t ( pin ) ;
40
41 i f (com==PIN_MODE | | com==DIGITAL_WRITE) {
42 s t a r t=getCommand ( ) ;
43 S e r i a l . p r i n t ( s t a r t ) ;
44 value=getCommand ( ) ;
45 S e r i a l . p r i n t ( va lue ) ;
46 a l lFunc (com , pin , va lue ) ; }
47
48 i f (com==DIGITAL_READ | | com==ANALOG_READ){
49 S e r i a l . p r i n t ( s t a r t ) ;
50 value=al lFunc (com , pin , 0 ) ; }
51 S e r i a l . p r i n t ( va lue ) ; }
52
53 i f (com==ANALOG_WRITE){
54 s t a r t=getCommand ( ) ;
55 S e r i a l . p r i n t ( s t a r t ) ;
56 value=getCommand ( ) ;
57 i f ( value <100){ S e r i a l . p r i n t ( s t a r t ) ; }
58 i f ( value <10){ S e r i a l . p r i n t ( s t a r t ) ; }
59 S e r i a l . p r i n t ( va lue ) ;
60 a l lFunc (com , pin , va lue ) ; }
61 }
62 PT_END( pt ) ;
63 }
64
40

65 stat ic int havimoThread ( struct pt ∗pt ){
66 PT_BEGIN( pt ) ;
67
68 int c [ 1 6 ] , d [ 1 6 ] ; // crea t e con ta iner s
69
70 pinMode (12 ,OUTPUT) ; // Set p ins as output
71 pinMode (13 ,OUTPUT) ;
72
73 havimo . captureRegion ( ) ; //Capture and read image
74 havimo . readRegion (1 , c ) ;
75 havimo . readRegion (2 , d ) ;
76
77 i f ( c [1]==2 | | d [1]==2){ a l lFunc (DIGITAL_WRITE, 1 2 , 1 ) ; } // co l o r 2
78 else { a l lFunc (DIGITAL_WRITE, 1 2 , 0 ) ; }
79
80 i f ( c [1]==1 | | ( c [1]==2 && d[1]==1)){ a l lFunc (DIGITAL_WRITE, 1 3 , 1 ) ; } // co l o r 1
81 else { a l lFunc (DIGITAL_WRITE, 1 3 , 0 ) ; }
82 PT_END( pt ) ;
83 }
84
85 int getCommand (){ // ge t s e r i a l commands
86 int m=Se r i a l . read ( ) ;
87 return m;
88 }
89
90 int a l lFunc ( int com , int pin , int value ){ // Switch arduino f unc t i on s
91 int va l ;
92 switch (com){
93 case PIN_MODE:
94 pinMode ( pin , va lue ) ;
95 case DIGITAL_READ:
96 return d ig i t a lRead ( pin ) ;
97 break ;
98 case DIGITAL_WRITE:
99 d i g i t a lWr i t e ( pin , va lue ) ;
100 break ;
41
101 case ANALOG_READ:
102 va l= analogRead ( pin ) ;
103 i f ( va l <100){ S e r i a l . p r i n t ( 0 ) ; }
104 i f ( val <10){ S e r i a l . p r i n t ( 0 ) ; }
105 return va l ;
106 break ;
107 case ANALOG_WRITE:
108 analogWrite ( pin , va lue ) ;
109 break ;
110 default :
111 break ;
112 }
113 }
114 void setup ( ){
115 S e r i a l . begin (115200 ) ;
116 S e r i a l . f l u s h ( ) ;
117 PT_INIT(&pt1 ) ;
118 PT_INIT(&pt2 ) ;
119 }
120 void loop ( ){
121 havimoThread(&pt2 ) ;
122 s e r i a l I n t e r f a c eTh r e ad (&pt1 ) ;
123 }
42

B.2 HaViMo Library for Arduino
1 /∗
2 havimo . cpp
3 crea t ed May 14 th 2012
4 Author : Lovisa Irpa He l g ado t t i r
5 ∗/
6 #include "havimo . h"
7
8 HaViMo : : HaViMo( uint8_t Rx , uint8_t Tx , long baud ) : So f twa r eS e r i a l (Rx , Tx){
9 pinMode (Rx ,INPUT) ;
10 pinMode (Tx ,OUTPUT) ;
11 begin ( baud ) ;
12 }
13 bool HaViMo : : ping ( ){
14 int ∗ bu f f ;
15 checksum = PING ;
16
17 wr i t e ( ( uint8_t ) HEADER) ;
18 wr i t e ( ( uint8_t )HEADER_ID) ;
19 wr i t e ( ( uint8_t )PING) ;
20 wr i t e ( ( uint8_t )0 x00 ) ;
21 wr i t e ( ( uint8_t )0 x00 ) ;
22 wr i t e ( ( uint8_t ) checksum ) ;
23
24 i f ( ! getDataFromCamera ( buf f , 2 , 1 0 ) ) return fa l se ;
25 return true ;
26 }
27 void HaViMo : : readReg ( uint8_t regBegin , uint8_t regEnd , int ∗ bu f f ){
28 checksum = (( uint8_t )READ_REG ^ regBegin ^ regEnd)& 127 ;
29
30 wr i t e ( ( uint8_t ) HEADER) ;
31 wr i t e ( ( uint8_t )HEADER_ID) ;
32 wr i t e ( ( uint8_t )READ_REG) ;
33 wr i t e ( regBegin ) ;
34 wr i t e ( regEnd ) ;
43
35 wr i t e ( ( uint8_t ) checksum ) ;
36
37 int Bu f f e r s i z e =(regBegin !=( uint8_t )0 x00 )? ( regEnd−regBegin )+1: regEnd ;
38 getReturnPacket ( buf f , Bu f f e r s i z e ) ;
39 }
40 void HaViMo : : writeReg ( uint8_t reg , uint8_t value ){
41 checksum = (( uint8_t )WRITE_REG ^ reg ^ value)& 127 ;
42
43 wr i t e ( ( uint8_t ) HEADER) ;
44 wr i t e ( ( uint8_t )HEADER_ID) ;
45 wr i t e ( ( uint8_t )WRITE_REG) ;
46 wr i t e ( reg ) ;
47 wr i t e ( va lue ) ;
48 wr i t e ( ( uint8_t ) checksum ) ;
49 }
50 void HaViMo : : captureRegion ( ){
51
52 checksum = CAP_REGION;
53 wr i t e ( ( uint8_t ) HEADER) ;
54 wr i t e ( ( uint8_t )HEADER_ID) ;
55 wr i t e ( ( uint8_t )CAP_REGION) ;
56 wr i t e ( ( uint8_t )0 x00 ) ;
57 wr i t e ( ( uint8_t )0 x00 ) ;
58 wr i t e ( ( uint8_t ) checksum ) ;
59 de lay ( 2 0 0 ) ;
60 }
61 void HaViMo : : readRegion ( int reg ion , int ∗ bu f f ){
62 checksum = 0x0D ;
63
64 wr i t e ( ( uint8_t ) HEADER) ;
65 wr i t e ( ( uint8_t )HEADER_ID) ;
66 wr i t e ( ( uint8_t )READ_REGION) ;
67 wr i t e ( ( uint8_t )0 x10∗ r eg i on ) ;
68 wr i t e ( ( uint8_t )0 x10∗ r eg i on+0x0F ) ;
69 wr i t e ( ( uint8_t ) checksum ) ;
70 getReturnPacket ( buf f , 1 6 ) ;
44

71 }
72 // ///////////////////////////////
73 // Pr iva te Functions
74 // //////////////////////////////
75 void HaViMo : : getReturnPacket ( int ∗buf f , int bu f f e r S i z e ){
76 for ( int i =0; i<bu f f e r S i z e ; i++){
77 while ( ! a v a i l a b l e ( ) ) {}
78 bu f f [ i ]= read ( ) ; }
79
80 while ( a v a i l a b l e ( ) ) { read ( ) ; }
81 }
82 bool HaViMo : : getDataFromCamera ( int ∗buf f , int bu f f e r S i z e , int timeOut ){
83 time_t i n i t , t imer ;
84 int i =0;
85 i n i t=now ( ) ;
86 do{
87 bu f f [ i ]= read ( ) ;
88 i=i +1;
89 t imer=now()− i n i t ;
90 }while ( i<bu f f e r S i z e && timer< timeOut ) ;
91
92 i f ( i<bu f f e r S i z e ) return fa l se ;
93 return true ;
94 }
45
Top Related