









Languages
Pages
Legal


Co-verification Experience
Juncao LiSystem Verification LabComputer Science, PSU
01/05/2010

Agenda
• Overview• Sealevel PIO-24 Digital I/O Card• Intel 100M PCI Ethernet Adapter
System Verification Lab @CS, Portland State University 2

PIO-24 Digital I/O Card
• Driver code and device manual links– http://www.osronline.com/article.cfm?article=403– https://www.sealevel.com/uploads/manuals/8018S.pdf
• Driver size: 1724 lines of C code• Device model size: 1232 lines of C code• Issues found in the specification (device manual):
2• Bugs found in the driver: 4• Properties proved in the driver: 2
System Verification Lab @CS, Portland State University 3

Intel 100M PCI Ethernet adapter
• Driver code and device manual links– http://msdn.microsoft.com/en-us/library/dd163298.aspx
• The source code is available in WDK releases.• E.g., the SLAM SD one is in “WDK\src_6001\kmdf\pcidrv”
– http://download.intel.com/design/network/manuals/8255X_OpenSDM.pdf
• Driver size: 14406 lines of C code• Device model size: 3518 lines of C code• Issues found in the specification (device manual):
6• Bugs found in the driver: 3• Properties proved in the driver: 5
System Verification Lab @CS, Portland State University 4

Agenda
• Overview• Sealevel PIO-24 Digital I/O Card• Intel 100M PCI Ethernet adapter
System Verification Lab @CS, Portland State University 5

Specification Issues
• Hardware/Software (HW/SW) interface specifications (manuals) usually have problems:– Incompleteness: what should be clarified is
missing– Inconsistency: multi-places do not consistent
with each other
• Spec issues are found when – We model hardware devices according to the
specs– We verify drivers with the hardware models System Verification Lab @CS, Portland State University 6

Specification Issues
• Issue 1 (Incompleteness): – Location: Page 11, Section: Interrupt Read.– Problem:
• The default value of the register ISRQST1 is not specified. ISRQST1 indicates the interrupt pending status and “should” be 0 when the device is powering on.
– This problem is related to the bug “ProperISR2”
• Issue 2 (Inconsistency): – Location: Page 11, Section: I/O Control Code.– Problem:
• The CW1D1 bit of the Control Word register is never used, but the bit is not defined as “Not Used” in the Section, Register Description, at Page 10.
System Verification Lab @CS, Portland State University 7

Bug1: InvalidRead
• Driver will not read any invalid data• About the bug:
– Driver returns an invalid value to user applications without reading any hardware data register
System Verification Lab @CS, Portland State University 9

Initialize the device model
Test harness entry

Predicates, i.e. HW/SW states
HW state variable: no interrupt pending
HW state variable: interrupt enabled
SW state variable, the inconsistency of the two variables directly causes the bug
Entry the callback function:EvtIoDeviceControl

In the callback function
Process the I/O control code

I/O control codeDriver understands “else” as: interrupt is enabled in hardware

HW runs after this statement, where CurrentRequest and AwaitingInt
become inconsistent

The HW Transaction Function
In Hardware
Simulate the environment or the DIO device behaviors

In RunInterrupt
Fires an interrupt

Call the ISR

In the ISR
In Software

If it is this driver’s interrupt
Because the driver routine EvtIoDeviceControl was interrupted, AwaitingInt is
not “TRUE” yet

“data” is not read from the device
Schedule the DPC. This immediately violates the
rule: “CvIsrCallDpc” (see later slides)

ISR returns, EvtIoDeviceControl continues

EvtIoDeviceControl returns

DPC runs

CurrentReqest is not NULL, so prepare the data for the
user application!

The I/O request is completed with STATUS_SUCCESS, but the data was never
read from the hardware register!

Bug2: CvIsrCallDpc
• Before ISR schedules a DPC, the ISR should read hardware volatile registers first
• About the bug: – Driver does not read the hardware data register but still
requests the DPC
• This bug is already illustrated in the error trace of the “InvalidRead” bug– The actual error trace of the CvIsrCallDpc bug is different
because we used another life circle harness and this bug can happen at various places.
System Verification Lab @CS, Portland State University 26

However …
• InvalidRead and CvIsrCallDpc are different rules– Switch the two lines (in DioEvtDeviceControl) can fix the
“InvalidRead” bug:devContext->CurrentRequest = Request;devContext->AwaitingInt = TRUE;
– To fix the “CvIsrCallDpc” bugWe need to move the WdfInterruptQueueDpcForIsr(...) call into the “if(devContext->AwaitingInt) { ... }” block in ISR.
– These fixes have been proved correct by SDV (CoVer).
System Verification Lab @CS, Portland State University 27

Bug3: ProperISR1
• If ISR returns TURE (i.e. acknowledge the interrupt to OS), the device interrupt status should not be active; otherwise, it may cause the interrupt storm.
• There are two scenarios that can cause this bug: – When the interrupt firing condition is configured as “high
level” (resp. “low level”), the interrupt should be repeatedly fired if the input to Port A (least significant bit) stays high (reps. low)
– When the condition is “rising edge” (resp. falling edge), depending on the input frequency to Port A, the interrupt will be repeatedly fired
• Both of the scenarios can cause interrupt stormSystem Verification Lab @CS, Portland State University 28

In ISR
HW state: interrupt fired

Read the interrupt status and clear the register at
the same time

In hardware, interface event function
Clear the interrupt status register on read

HW transaction function runs after the interrupt status register has being cleared
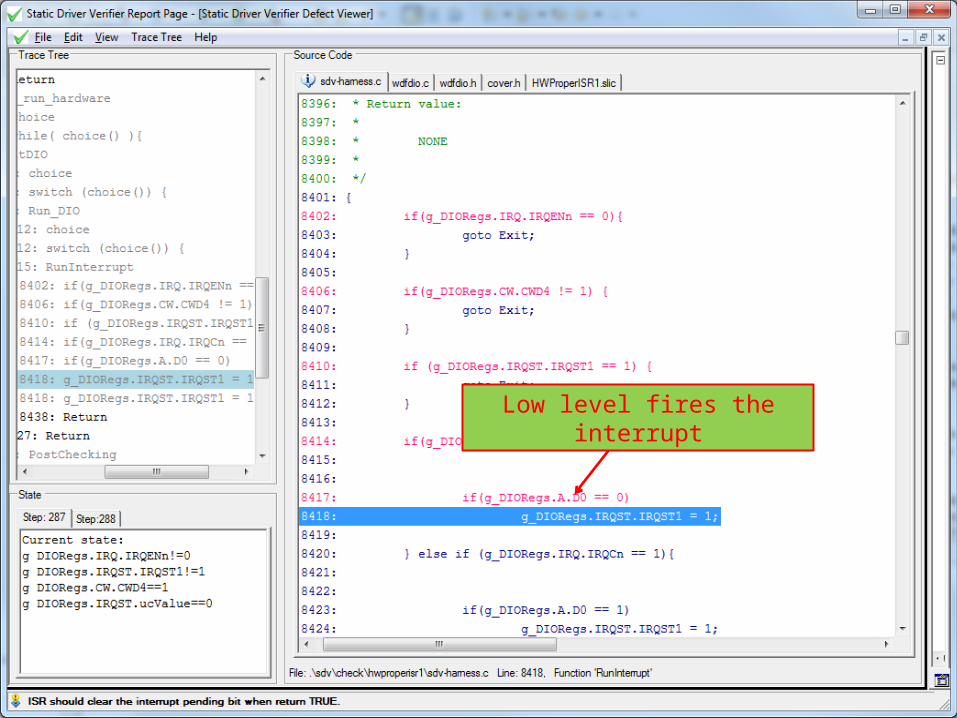
Low level fires the interrupt

The SLIC rule

About This Bug
• We learned a solution from the Ethernet adapter driver:– If the device may fire interrupts freqently– Disable the interrupt first in ISR and enable it later in
DPC after currect request has been serviced
System Verification Lab @CS, Portland State University 35

Bug4: ProperISR2
• ISR should not return TRUE if the interrupt of the device is not active, i.e. it is not this driver's interrupt.
• About the bug: – ISR acknowledges an interrupt even when the interrupt
of the device is disabled– Related to spec issue 1: ISRQST1 doesn’t have a default
value– A scenario for this bug:
• ISRQST1 is initialized to be 1 during the device power-on• OS registers the DIO driver’s ISR to the PCI bus’ interrupt vector
table • Another PCI device fires an interrupt• The DIO driver may have an “opportunity” to acknowledge this
interrupt System Verification Lab @CS, Portland State University 36

Bug4: ProperISR2
• The causes of this bug:– The default value of ISRQST1 is not clearly stated in the
spec– The driver doesn’t reset the device during the device
power-on– The ISR only checks the ISRQST1 register to decide if
there is an interrupt pending (this bug can be avoided, if the interrupt-enabled register is also checked)
• I have to admit, the chance for this bug seems quite low– However, when it happens, no one will notice!
System Verification Lab @CS, Portland State University 37

Agenda
• Overview• Sealevel PIO-24 Digital I/O Card• Intel 100M PCI Ethernet adapter
System Verification Lab @CS, Portland State University 38

Spec Issues – Some Examples
• Issue 1 (Inconsistency): – Location: Page 38 - 39– Problem:
• Table 15 is inconsistent with Table 14 about the types of CU commands.
• Issue 2 (Inconsistency): – Location: Page 136, Section: 8.2 Transmit
Processing– Problem:
System Verification Lab @CS, Portland State University 39
The word “previous” is missing here, otherwise the logic is wrong

Bug1: DoubleCUC
• The driver should not issue a CU command while the Command Unit (CU) is busy (not zero)– This is clearly stated in the device manual (specification)– Spec Page 37, Section: 6.3.2.2 SCB Command Word
• About the bug: – Driver issues a command to CU regardless the result of
the previous device operation (software reset)
System Verification Lab @CS, Portland State University 41

In EvtDeviceD0Entry callback function
HW states are non-deterministically initialized

Issue a software reset

Write to the “PORT” register to issue the
command
Inside the function HwSoftwareReset

In hardware model
Start the software reset process

Wait for the port reset to complete.
In software
Note: the device manual doesn’t promise that in how long a port reset can complete, so wait is NOT enough!

Issue a command when the reset process is not finished
Out from software reset.

Issue a command without waiting for the CU free

The SLIC rule

About this bug
• I was not sure at first• So I checked the Linux driver of the
same device– http://sourceforge.net/projects/e1000/– The driver is also found in (for example):
• linux-2.6.32/drivers/net/e100.c
System Verification Lab @CS, Portland State University 50

Let’s see how the Linux driver handles “software reset”.
It makes sure that the device is in correct state before issuing any command.

The Linux driver always waits before issuing a new command

Bug2: DevD0Entry
• The callback function EvtDeviceD0Entry returns the value (TRUE or FALSE) that correctly represents the hardware state (initialized or failed)– This rule is clearly stated in MSDN
• About the bug: – Driver returns STATUS_SUCCESS even if the operations
on the device have failed– The error trace illustrates that the driver continues its
attempts to initialize the device even after the previous operations have failed
System Verification Lab @CS, Portland State University 53

In EvtDeviceD0Entry callback function
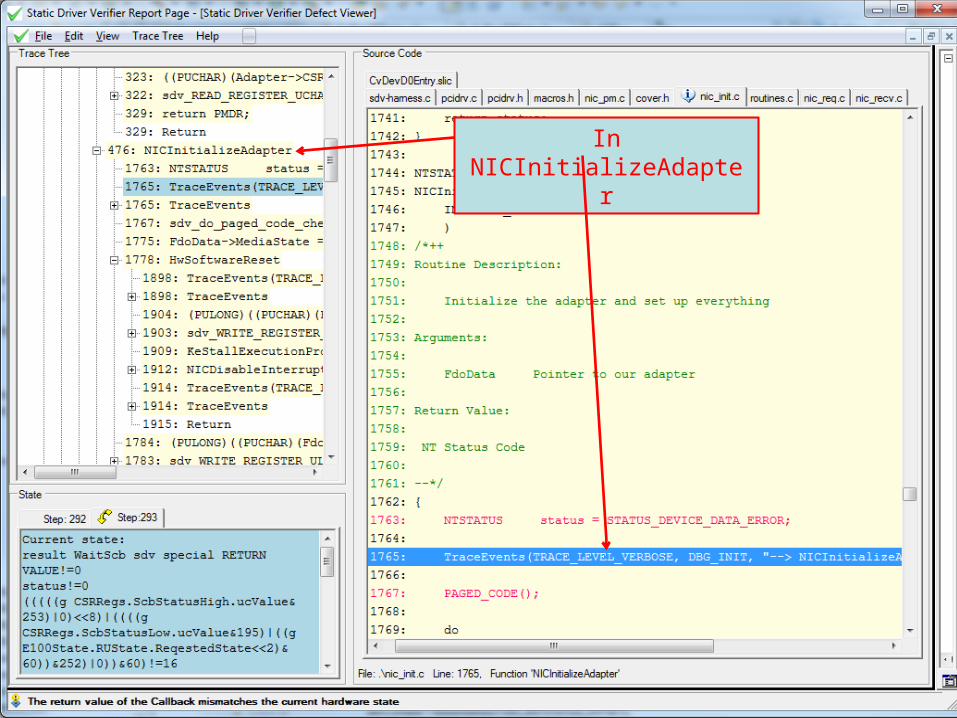
In NICInitializeAdapter
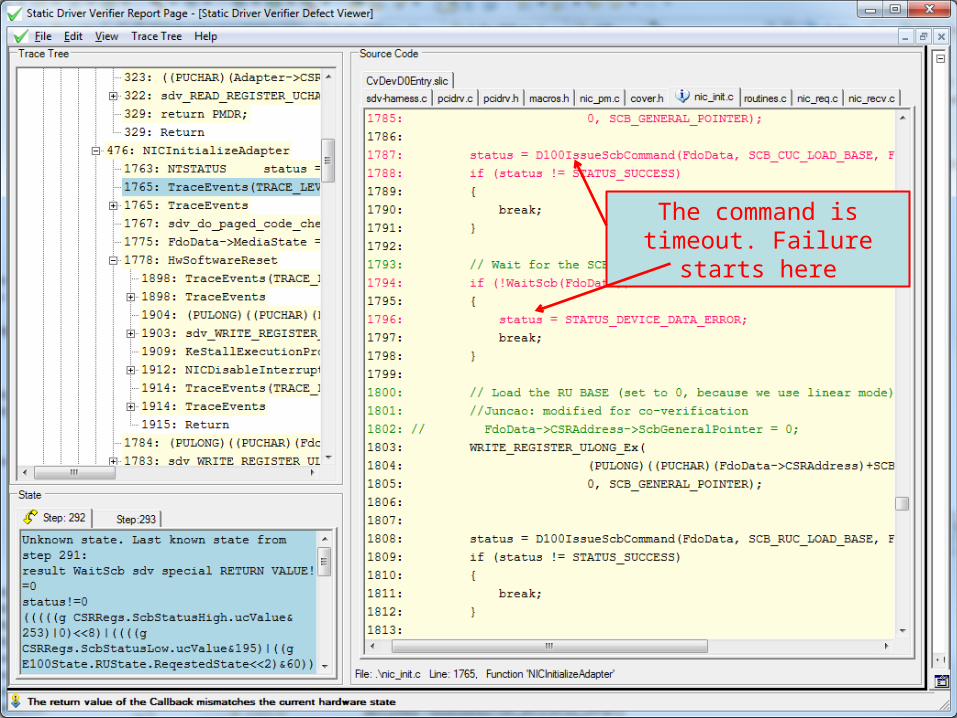
The command is timeout. Failure starts here

Return the failure status

Do some work and return the failure status that is
returned from NICInitializeAdapter()

The return value of MPSetPowerD0Private() is ignored. The initialization
process goes on as if nothing happened

EvtDeviceD0Entry returns STATUS_SCCESS while the device state is a mess
…

• Once again, how about the Linux driver?
System Verification Lab @CS, Portland State University 61

Corresponding to EvtDeviceD0Entry
System Verification Lab @CS, Portland State University 62


Bug3: DevD0Exit
• The callback EvtDeviceD0Exit returns the value (TRUE or FALSE) that can correctly represent the hardware state (i.e. if the hardware has been properly stopped).– This rule is clearly stated in MSDN
• About the bug: – Driver returns STATUS_SUCCESS even if the operations
on the device have failed.
System Verification Lab @CS, Portland State University 64

Reference• Juncao Li, Fei Xie, Thomas Ball, Vladimir Levin, and Con McGarvey. An Automata-Theoretic
Approach to Hardware/Software Co-verification. To appear in Proc. of International Conference on Foundational Approaches to Software Engineering (FASE)
– Link: http://web.cecs.pdx.edu/~juncao/links/mypapers/cover2010.pdf
System Verification Lab @CS, Portland State University 65

System Verification Lab @CS, Portland State University 66
Questions ?
Top Related