





Languages
Pages
Legal


85
CHAPTER 5
VEGETATION CLASSIFICATION USING SPACE-BORNE SAR DATA
5.1 INTRODUCTION:
Remote sensing techniques aided with ground information provide a
reliable source of vegetation classification in a cost and time-effective way.
While the utility of optical data in vegetation classification is well known, the
potential of airborne and space-borne radar systems is attempted
successfully in several studies. Radar sensors operating in different
wavelengths and polarizations can be widely used for large-scale land cover
mapping and monitoring using backscatter coefficients in different
polarizations and wavelength bands. C-band space borne SAR is widely
used for the classification of the vegetation type using techniques viz.,
texture measures, multi-sensor fusion, multi-polarization data, multi-
temporal data and polarimetric data (Strozzi et al., 2000; Rignot et al., 1997;
Nezry et al., 1993; Saatchi et al., 1997; Oliver, 1998; Frery et al., 1999;
Grover et al., 1999; Yanasse et al., 1997; Saatchi et al., 2000; Kimball et al.,
2004).
In the present study, three different approaches/ techniques were
discussed for vegetation classification using amplitude space-borne SAR

86
data in two wavelength bands; C-band ENVISAT-ASAR and L-band ALOS-
PALSAR datasets.
5.2 TECHNIQUES USED FOR VEGETATION CLASSIFICATION:
In the present study, vegetation classification using space-borne SAR
data was carried out using following techniques in C and L wavelength
bands:
5.2.1 First order statistics based vegetation classification
5.2.1 Multi-sensor fusion based vegetation classification
5.2.3 Texture measures based vegetation classification
5.2.1 First order statistics based vegetation classification:
Acquired ASAR and PALSAR data were preprocessed and calibrated to
backscattering coefficient and used for vegetation classification.
Backscattering coefficient of different land use classes were analysed using
the ground truth points; mean, standard deviation and range of
backscattering coefficient for each land cover class is calculated. Using
these values, thresholdings of backscattering coefficient for each land cover
class is determined and applied on images for vegetation classification.
5.2.1.1 Using dual polarization ASAR data: The FCC combination of
dual polarized data i.e., HH and VV; VV and VH enabled the discrimination
of vegetated and non-vegetated areas but the delineation within the
vegetated areas i.e., forest and agriculture was unclear. Basic land cover

87
types viz., vegetation, non-vegetation areas, settlements and water bodies
were discriminated from the dual-polarized ASAR data. Settlements showed
high backscattering coefficient values, followed by barren/fallow lands and
then by vegetation. Backscattering coefficient of water is very low.
Backscattering coefficient of agriculture and forested areas were in the same
range and hence could not be discriminated. Though mean backscattering
coefficient of agriculture and forested areas are different, there was an
overlap in the standard deviation of range of values. Hence, the
discrimination of vegetation classes using backscattering coefficient of ASAR
data was not clear. The use of multi-temporal data ENVISAT-ASAR data
may be useful for discrimination of forest and agriculture.
5.2.1.2 Using ALOS-PALSAR data: Backscattering coefficient of
different land use classes were analyzed from the pixel values belonging to
ground truth points of particular class. Different vegetation classes have
different backscattering coefficient values and hence, discrimination of
vegetation classes was carried out with the thresholding of backscatter
coefficient values for each land cover class.
From the fig 5.1, it can be seen that the backscattering coefficients of
moist-deciduous forests, teak forests, agriculture, barren and water are
different.

88
ALOS-PALSAR showed the clear discrimination of forest, teak forests,
agriculture, barren and water bodies. The backscattering coefficient of
forested area is high followed by agriculture and then by barren lands (Fig
5.2 (a)).
Teak plantations within the forested area were discernable as their
backscattering coefficient is greater than the forested area. This may be
attributed to the systematic arrangement of trees, similar height class and
age of the trees. The forested area in terrain appeared bright and saturated
in the image. The shadow regions were misclassified as crops. This may be
due to low backscattering coefficient in the shadow regions which is in same
range with backscattering coefficient of agriculture.
Fig 4.1: Variation of backscattering coefficient of PALSAR data in different landuse classes
-20
-16
-12
-8
-4
0
Water Barren Agriculture MDforest Teak
Back
scat
terin
g co
effic
ient
(dB)
Land Use classes
Variation in backscattering coeficient of PALSAR data in different landuse classes

89
Accuracy assessment of the classified map (Fig 5.2 (b)) was carried out by
generating error matrix and kappa statistics. Accuracy assessment points in
the classified image were generated stratified randomly and the accuracy
assessment was carried out comparing with ground truth points and IRS P6
LISS-III image. Overall classification accuracy and kappa statistics using
stand alone PALSAR single polarization data was 82.4% and 0.72
respectively and the details are given in table 5.1. Discrimination of barren
areas with current fallow was not proper. The cropped area is discernable
but crop harvested area and current fallow regions were classified as
barren/non-vegetated areas. The discrimination within forested areas was
enhanced and classification accuracy/discrimination capability was better
than ASAR data.
Fig 5.2: (a) L-band PALSAR HH polarized data (b) Classified image of Achanakmar-Amarkantak Biosphere Reserve,Bilaspur
Teak dominated forest Moist deciduous forest Forested area in terrainCrop land WaterNon-vegetated area
a bTeak dominated forest Moist deciduous forest Forested area in terrainCrop land WaterNon-vegetated areaTeak dominated forest Moist deciduous forest Forested area in terrainCrop land WaterNon-vegetated area
a b

90
Table 5.1: Accuracy assessment and Kappa statistics of classified map generated from first order statistics
Class name Producer's accuracy User's accuracy Kappa statistics
Non-vegetated area 83.33% 71.43% 0.82
Mixed moist deciduous forest 78.57% 73.33% 0.69
Teak dominated forest 75.00% 60.00% 0.57
Cropland 84.21% 84.21% 0.81 Water 90.91% 76.92% 0.74
However, backscattering coefficient values also depend on the phyllotaxy,
physiognomy, canopy structure and different species compositions present
in the study area hence the use of multi-sensor fusion and texture
measures based vegetation classification enhance the classification
capability of SAR data.
5.2.2 Multi-sensor fusion based vegetation classification
5.2.2.1 Introduction: Studies on the fusion of microwave and optical
data have shown the enhanced capabilities of merged data for improved
delineation of LULC categories. Image fusion techniques deal with
integration of complementary and redundant information from multiple
images to create a composite image that contains a better description of the
scene (Saraf et al., 1999). Data fusion can reduce the uncertainty associated
with the data acquired by different sensors or by same sensor with temporal
variation. Further, the fusion techniques may improve interpretation
capabilities with respect to subsequent tasks by using complementary
information sources (Wen and Chen, 2004).

91
The fusion of two data sets can be done in order to obtain one single data
set with the qualities of both (Saraf et al., 1999). The low-resolution
multispectral satellite imagery can be combined with the higher resolution
radar imagery by fusion technique to improve the interpretability of the
merged image. The resultant data product has the advantages of high
spatial resolution, structural information (from radar image), and spectral
resolution (from optical and infrared bands). Thus, the merged image
provides faster interpretation (Simone et al., 2002), and can help in
extracting more features (Wen and Chen, 2004).Various image fusion
techniques viz., Intensity-Hue-Saturation, Principal component analysis,
Bovey transformation, Wavelet transformation etc., are available in
published literature (Li et al., 2002; Tu et al., 2001). Image fusion improves
geometric corrections, classification accuracy, substitutes missing
information; enhance certain features (Pohl, 1996).
5.2.2.2 Methodology: The potential of the fusion of SAR data with
optical data for discrimination of different land-cover classes in parts of
Dandeli sub division, Uttara Kannada district, Western Ghats, Karnataka,
India (Refer Chapter-3 for detail description of the study area) was carried
out in the present study. Environment Satellite’s (ENVISAT) C-band
Advanced Synthetic Aperture Radar (ASAR) data of 30 Oct 2006 with HH
polarization and Advanced Land Observing Satellite (ALOS) – Phased Array
L-band Synthetic Aperture Radar (PALSAR) data of 10th Feb 2007 with HH
polarization were merged with Indian Remote Sensing Satellite – Linear

92
Imaging Self Scanning Sensor-III (IRS-P6 LISS-III) data collected on 11 Jan
2006 were used for vegetation classification.
The schematic diagram for generation of vegetation classified map from
multi-sensor fusion technique is given in fig 5.3.
The backscatter images of ASAR and PALSAR in HH polarization were
merged with LISS-III data using Intensity Hue Saturation technique, as IHS
technique is considered as standard procedure in image analysis. The IHS is
a colour related technique which effectively separates spatial (I) and spectral
(H, S) information from a standard RGB image.
IHS colour transformation based image fusion is one of the standard
methods for sharpening of multi-sensor data. The hue value corresponds to
Fig 5.3: Methodology flow chart for multi-sensor fusion
Spaceborne SAR data IRS P6 LISS-III data
Preprocessing of SAR data Atmospheric correction
Geocoding, Co-registration, Resampling to common grid
Intensity, hue, saturation fusion technique
Supervised classification
Vegetation classification

93
the dominant wavelength of the light, saturation is a colour’s purity and
intensity measures the brightness of a colour. The three components of the
original image R, G and B are transformed into the IHS colour space. After
the transformation, the low-resolution intensity component I is replaced by
the SAR band with higher spatial resolution, the final step is to transform
the image back to RGB colour space with the original values of H and S
(Pohl, 1996). The mathematical description and RGB to IHS is given below:
5.2.2.3 Mathematical description: The IHS colour transformation
effectively separates spatial (I) and spectral (H, S) information from a
standard RGB image. From the equation below, I relates to the intensity,
while `v1’ and `v2’ represent intermediate variables which are needed in the
transformation. H and S stand for Hue and Saturation, (Harrison and Jupp,
1990; Pohl, 1996).
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
−
−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
BGR
vvI
02
12
16
26
16
13
13
13
1
.2
1 ----------- (5.1)
⎟⎟⎠
⎞⎜⎜⎝
⎛= −
1
21tanvvH -------- (5.2) 2
221 vvS += -------- (5.3)
IHS technique transforms three channels of the data set representing
RGB into the IHS colour space which separates the colour aspects in its

94
average brightness (intensity). IHS technique replaces one of the three
components (I, H or S) of one data set with another image (Pohl, 1996).
Reverse transformation from IHS to RGB is given in below equation which
converts the data into its original image space to obtain the fused image
(Hinse and Proulx, 1995; Pohl, 1996).
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
−
−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2
1
06
23
12
16
13
12
16
13
1
. vvI
BGR
--------------- (5.4)
The merged data of ASAR and PALSAR were subjected to supervised
classification using maximum likelihood classifier, by giving training areas
based on ground-based information, and the accuracy assessment of the
classified outputs has been carried out by generating confusion matrices
and kappa statistics.
5.2.2.4 Results and Discussion: The fused C-band and L-band images
were generated and Vegetation classified maps were generated for the study
area. Accuracy assessments of classified maps were carried out.

95
2.2.4.1 Using C-band ENVISAT-ASAR data: The merged output has
been found to delineate the forest types better apart from other land-cover
classes and minimize the shadow effect when compared with the stand
alone ASAR backscattering coefficient threshold.
Fig 5.4: FCC of IHS merged data for Dandeli site, Karnataka

96
ASAR images contributed different signals due to differences in surface
roughness, shape and moisture content of the observed ground cover. And
the optical data rely on the spectral signature of the ground targets in the
image.
Fig 5.5: Vegetation classified map of IHS merged data for Dandeli site
Settlements

97
Therefore, fusion of optical and microwave data (fig 5.4) provided a
unique combination that enhanced the identification of classes, forest
classification (Fig 5.5).
The classification accuracy of remote sensing images was improved when
fused data was used for deriving information on vegetation classification.
The overall classification accuracy and kappa coefficient of ASAR merged
data was 84% and 0.77 respectively and is given in table 5.2. Fused data
provided robust operational performance, i.e., increased confidence, reduced
ambiguity, improved reliability and improved classification (Rogers and
Wood, 1990).
Table 5.2: Accuracy assessment and Kappa statistics of classified map generated from ASAR merged data
Class name Producer's accuracy User's accuracy
Kappa statistics
Water 90.91% 89.21% 0.86 Mixed moist deciduous 73.75% 78.24% 0.74 Teak 75.23% 72.34% 0.71 Agriculture 76.47% 86.67% 0.79 Barren 66.67% 66.67% 0.62
Fused image enhanced the classification capability within the forests.
Teak forests could be clearly discriminated in the fused image. There was
clear distinction between forested and agricultural areas in the merged
image. The LISS-III image enabled not only discrimination of various land
cover types but also delineation of sub categories of forest types in the
merged data.

98
2.2.4.2 Using L-band ALOS-PALSAR data:
FCC of merged PALSAR data bands discriminated forest, agriculture,
water and barren areas. Within forest, the differentiation of teak forests and
mixed moist deciduous forests was possible. The results were in accordance
with the ASAR merged data. However, the discrimination of small patches of
teak plantation within the forested areas (Fig 5.6) was possible using
merged PALSAR data. The differentiation of the teak plantation in C-band
merged was not possible as the resolution of C-band ASAR used was coarser
and thus were not able to differentiate in merged C-band data.
Classified map generated from maximum likelihood supervised
classification technique discriminated water, agriculture, moist deciduous
forests, teak mixed forests and barren lands. Accuracy assessment of the
classified map was carried out by generating error matrix and kappa
statistics. The overall classification accuracy and kappa statistics were 83%
and 0.76 respectively and are given in table 5.3.
(a) L-BAND ALOS-PALSAR (b) FCC OF IRSP6-LISS-III (c) MERGED DATA OF PALSAR AND LISS-III(a) L-BAND ALOS-PALSAR (b) FCC OF IRSP6-LISS-III (c) MERGED DATA OF PALSAR AND LISS-III(a) L-BAND ALOS-PALSAR (b) FCC OF IRSP6-LISS-III (c) MERGED DATA OF PALSAR AND LISS-III(a) L-BAND ALOS-PALSAR (b) FCC OF IRSP6-LISS-III (c) MERGED DATA OF PALSAR AND LISS-III
Fig 5.6: Delineation of teak plantations in forested area of Dandeli site (yellow colour represents teak plantation).
99
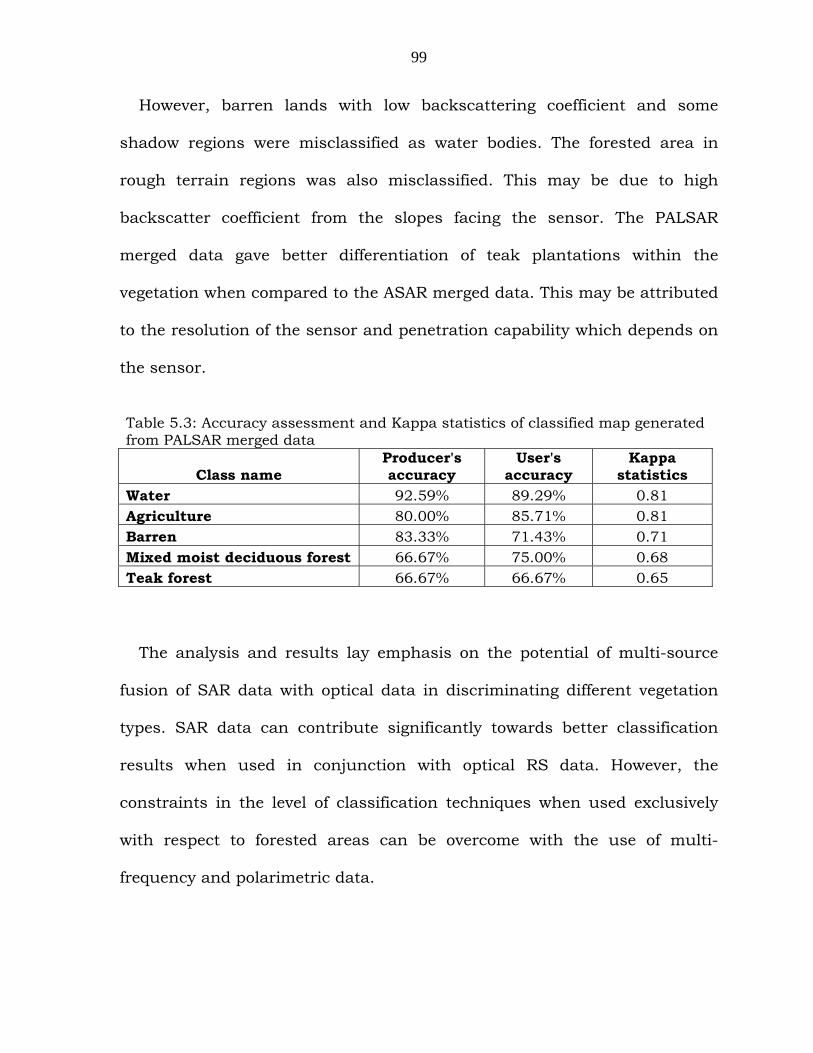
However, barren lands with low backscattering coefficient and some
shadow regions were misclassified as water bodies. The forested area in
rough terrain regions was also misclassified. This may be due to high
backscatter coefficient from the slopes facing the sensor. The PALSAR
merged data gave better differentiation of teak plantations within the
vegetation when compared to the ASAR merged data. This may be attributed
to the resolution of the sensor and penetration capability which depends on
the sensor.
Table 5.3: Accuracy assessment and Kappa statistics of classified map generated from PALSAR merged data
Class name Producer's accuracy
User's accuracy
Kappa statistics
Water 92.59% 89.29% 0.81 Agriculture 80.00% 85.71% 0.81 Barren 83.33% 71.43% 0.71 Mixed moist deciduous forest 66.67% 75.00% 0.68 Teak forest 66.67% 66.67% 0.65
The analysis and results lay emphasis on the potential of multi-source
fusion of SAR data with optical data in discriminating different vegetation
types. SAR data can contribute significantly towards better classification
results when used in conjunction with optical RS data. However, the
constraints in the level of classification techniques when used exclusively
with respect to forested areas can be overcome with the use of multi-
frequency and polarimetric data.

100
5.2.3 Texture measures based vegetation classification:
As our objective was vegetation classification using stand-alone SAR data
and to utilize the maximum application potential of ASAR data in vegetation
classification, texture measures were computed and used in the present
study.
5.2.3.1 Introduction: Various studies showed that texture is the most
important source of information in high-resolution radar images (Ulaby et
al., 1982; Dobson et al., 1995; Dellacqua et al., 2003; Vander Saden, 1997).
Texture can be defined as the various measures of smoothness, coarseness,
and regularity of an image region (Rogers and Woods, 1992). The popular
grey-level co-occurrence matrix (GLCM) texture model (Haralick et al., 1973)
has been widely used in remote sensing studies (Clausi, 2002; Franklin et
al., 2001; Ouma et al., 2008). Recently, texture-based classification
algorithms have been successfully applied to VHR satellite imagery (Aguera
et al., 2008; Ouma et al., 2008; Puissant et al., 2005).
The grey level co-occurrence matrix or GLCM (Haralick et al., 1973;
Parker, 1997; Shapiro and Stockman, 2001) is one of the most widely used
texture measures, and was first suggested as a mechanism for deriving
texture measures by Haralick et al., (1973). Texture analysis in SAR data
was considered as the most important source of information (Luckman et
al., 1997) and textural measures were considered for automated land cover
classification. Luckman et al., (1997) were able to qualitatively distinguish

101
between three regeneration stages, using CCRS Convair 580 C-band data
over the Brazilian Amazon.
Measuring texture in images using the grey level co-occurrence matrix
(GLCM) has been carried out in few studies (Collins et al., 2000, Marceau et
al., 1990). Maillard, (2003) and Dulyakarn et al., (2000) compared texture
analysis methods and suggested Grey Level Co-occurrence Matrix (GLCM)
as the effective texture analysis scheme. Haralick et al., (1973) proposed
several measures that can be used to extract useful textural information
from a GLCM. GLCM is a measure of the probability of occurrence of two
grey levels separated by a given distance in a given direction (Mather, 1999).
As the GLCM is calculated for a given pixel separation, it is sensitive to the
scale and directionality of image texture. It also requires that the horizontal
and vertical offsets of the two pixels be specified along with the size of image
segment over which the GLCM should be constructed by a moving window
of a given size.
Many researches explained texture measures using GLCM matrix (Barber
and LeDrew, 1991, Soh et al., 1999; Roneorp et al., 1998) for variety of
applications like land-cover mapping (Kurosu et al., 1999; Vander Sanden
and Hoekman, 1999; Wu and Linders, 1999), crop discrimination (Soares et
al., 1997) and forest studies (Luckman et al., 1997; Kurvonen et al., 1999;
Van der Sanden and Hoekman, 1999). Several studies have shown that the
texture coarseness increased from very little in clear-cut areas, to

102
intermediate in regenerating stages, to greatest coarseness in mature
forests. As for useful types of texture image by GLCM, homogeneity is the
most useful one among several types of texture measures (Franklin et al.,
2001 and Kiema, 2002).
In this study, discrimination of land cover classes using texture measures
computed from GLCM co-occurrence measures of HH polarization data was
carried out.
5.2.3.2 Methodology: The potential of texture measures computed
from SAR data for discrimination of different land-cover classes in
Achanakmar-Amarkantak Biosphere Reserve, (Refer Chapter-3 for detail
description of the study area) was carried out in the present study.
Environment Satellite’s (ENVISAT) C-band Advanced Synthetic Aperture
Radar (ASAR) data of 29 Oct 2006 with HH polarization and Advanced Land
Observing Satellite (ALOS) – Phased Array L-band Synthetic Aperture Radar
(PALSAR) data of 04th Oct 2006 with HH polarization were used for
vegetation classification. Methodology flowchart for generation of vegetation
classified map using texture measures is given in fig 5.7.

103
ENVISAT-ASAR data
Preprocessing of ASAR data
Generation of texture measures
FCC of mean, homogeneity and Entropy
Supervised classification
Delineation of vegetation classes
Training sets
Fig 5.7: Methodology flowchart for vegetation classification using texture measures
ENVISAT-ASAR data
Preprocessing of ASAR data
Generation of texture measures
FCC of mean, homogeneity and Entropy
Supervised classification
Delineation of vegetation classes
Training sets
Fig 5.7: Methodology flowchart for vegetation classification using texture measures
Radiometric calibration, speckle suppression and geocoding of the
ENVISAT-ASAR image was carried out as discussed in chapter-4. GLCM is
constructed by considering the relationship between two pixels at a time.
These pixels are referred to as the reference and neighbour pixels. In this
study, the neighbour pixel was at a displacement of (1, 1) to the reference
pixel i.e., the neighbour pixel was the pixel located one pixel above and to
the right of the reference pixel. Given a large enough window size, any offset
could be used, but (1, 1) is the most commonly used offset (Hall-Beyer,
2007). The matrix is then created with discrete grey level values. In this
Fig 5.7: Methodology flowchart for vegetation classification using texture measures

104
study, the grey values of the input pixels were quantised to 64 discrete
levels which led to a 64 by 64 element GLCM.
The methodology for the selection of window size, texture features and
classification is carried out in three steps; firstly, to determine the optimal
window size for the study area; secondly, to determine what texture features
to use; and thirdly, to obtain the best results possible using determined
texture measures for vegetation classification. The GLCM is calculated for
an image window of a given size. The size of this window has a large effect
on texture features. The optimal size of this window depends largely on the
image and features being classified. Aplin (2006), Chen et al., (2004), and
Franklin et al., (1996) studied the effect of the GLCM window size on
classification results.
Texture measures using grey level co-occurrence matrices were carried
out using varying window sizes of 5x5, 7x7, 9x9 and 11x11. By using the
overall accuracy provided by the error matrix, we observed how the
accuracy varied as the window size increased. Eight texture measures were
computed and false color composites (FCCs) were generated using different
combinations of textural measures to discriminate various vegetation types.
The implementation provided within the IDL/ENVI software (ITTVIS, 2009)
was used for this study.
Eight texture measures were generated and these fall into three highly
correlated categories. Contrast, dissimilarity, and homogeneity are contrast

105
based; angular second moment and entropy are orderliness based; and the
mean, variance, and correlation are statistically based. As texture measures
in the same category are highly correlated generally there is no need to use
more than one from each category (Hall-Beyer, 2007). Therefore, each
texture measure was individually compared to the other within the same
category, and the most descriptive feature from each category was selected.
Each feature was therefore classified individually using the minimum
distance classifier; then the overall accuracy provided by the error matrix
was used to determine the best feature from each category. The three best
features i.e., mean, entropy and homogeneity were combined and then
classified using the maximum likelihood classifier.
Haralick et al. (1973). The first and second order co-occurrence measures
used in the present study are listed below.
------------------------------- (5.5)
----------- (5.6)
-------------- (5.7)
where ‘k’ is the number of grey tone values and
P (i,j) is the (i,j)th entry of the normalized GLCM matrix
The False Colour composite (FCC) of homogeneity, mean and entropy was
used for the delineation of different land cover classes viz., agriculture, open
∑= ii
kxMean
∑ ∑=i j
jiPjiPEntropy ),(log),(
∑ ∑ −+=
||1),(ji
jiPyHomogeneit

106
forests, dense forests, scrub, water bodies and barren lands using
maximum likelihood technique. Accuracy assessment of the classified image
was carried out by generating error matrix and kappa statistics.
5.2.3.3 Results and Discussions: Texture measures generated with
varying window sizes of 3x3, 5x5, 7x7 and 9x9, 11x11 were analyzed and
the texture measures generated from window size 9x9 have shown the
better discrimination capability as compared to other window sizes. Fig 5.8
shows how the overall accuracy of the classification changes as the window
size increases from 3 to 11.
All eight features from each window size were classified with the maximum
likelihood classifier. As can be seen from the fig 5.8, classification accuracy
increases as the window size increases. Therefore, from a statistical
perspective is preferred to choose a large window size, but this is not
necessarily the case. The study areas, resolution of the sensor were also
considered to choose the window size. The optimal window size is a
compromise between having a good overall accuracy and retaining a small
enough window size so that edge effects become insignificant. Fig 5.8 shows
the change in classification accuracy with the change in window size.
Therefore, the window size of 9 was chosen for this study, which is where
the slope of the accuracy graph decreases (fig 5.8).

107
Table 5.4: Overall accuracy for all texture features using a window size of 7 and the minimum distance classifier
Feature group Texture measure Overall accuracy (%) Mean 72.25 Variance 68.34
Statistical
Correlation 33.12 Contrast 66.87 Dissimilarity 64.32
Contrast
Homogeneity 73.18 Entropy 58.56 Orderliness Second moment 53.33
Table 5.4 shows the overall accuracy of each feature for classifications using
a window size of 9. For the contrast group, the best feature was
homogeneity; from the statistical group, the best feature was mean; and
from the orderliness group, the best feature was entropy. The best features
from each category were classified using the maximum likelihood classifier.
Fig 5.8: Overall accuracy classification using eight band over a range of window sizes
50
60
70
80
90
100
0 1 2 3 4 5 6 7 8 9 10 11 12
Ove
rall
clas
sific
atio
n ac
cura
cy
Window size

108
Fig 5.9 (i) shows the intensity image in HH polarization for which different
textural measures was computed. FCC generated from homogeneity, mean
and entropy (fig 5.9(ii)) has enabled better discrimination as compared to
the others. Texture measures generated from GLCM increased the ability to
discriminate different land cover classes using single date and single
polarized data. Different land cover classes showed different textural
measures. Forests exhibit a wide variety of texture influenced by SAR
parameters and forest characteristics.
Fig 5.9: i) 29 Oct 07 HH Image ii) FCC of Homogeneity, Mean and Entropy in parts of Bilaspur, Chattisgarh
i ii
The FCC (fig 5.9 (ii)) showed a good seperability between agriculture and
forest regions as well as dense and open forests. Combinations of various
Fig 5.9: i) ASAR HH image of 29th Oct07 ii) FCC of homogeneity (Red), Mean (Green) and Entropy (Blue) in Achanakmar-Amarkantak biosphere Reserve

109
textural measures showed improvement over single-set texture measure
because of their different, complementary information.
The FCC generated from homogeneity, mean and entropy was analyzed
using maximum likelihood algorithm. The thematic map thus generated, is
shown as fig 5.10.
Homogeneity values were high; forests and agriculture had high
homogeneity values than other classes. There was no change of
homogeneity values (ranged between 0.1 and 0.2) between agriculture and
forested regions.
Entropy values in the study area ranged between 1 and 3. Entropy values
were high (ranged between 2.5 and 4) for the scrub and hilly terrain areas.
Entropy, which is a measure of the degree of disorder, is larger when the
image is texturally non-uniform or heterogeneous. Entropy band helped
discrimination of open and dense forests within the forested area. The
values of the entropy increased with decreasing density viz., dense forests
showed low entropy values than open forests. The mean backscatter band
showed the discrimination between the agriculture and forested areas.
Areas of slope facing the sensor in the terrain areas have been misclassified
as scrub regions. Backward slope is mostly under the shadow and is
misclassified as water.

110
Accuracy assessment of the classified map generated from ASAR data was
carried out using ground truth points and IRS P6 LISS-III data. Error matrix
and kappa statistics were generated and given in Table 5.5.
Fig 5.10: Vegetation classified map of Achanakmar-Amarkantak Biosphere Reserve using texture measures
81◦40’00”81◦30’00”81◦20’00”
22◦ 2
0’00
”22
◦ 30’
00”
22◦ 4
0’00
”
22◦20’00”
22◦30’00”
22◦40’00”
±

111
The over all classification accuracy and kappa statistics were 79.14% and
0.74, respectively. The discrimination of forests was quite good with the use
of the texture measures. However, there was some misclassification of
forests as barren areas in the hilly terrain regions. In some parts, croplands
and barren lands have been misclassified as current fallows. An overall
classification accuracy of 79% was achieved.
Table 5.5: Accuracy table and Kappa statistics of classified map generated from texture measures
Class Producer's accuracy User's accuracy Kappa statistics Dense forest 84.67% 76.47% 0.723 Open forest 94.12% 80.00% 0.759 Barren 60.00% 81.82% 0.786 Current fallow 83.33% 62.50% 0.573 Scrub 70.37% 90.48% 0.869 Agriculture 85.71% 80.00% 0.767
Texture measures using GLCM were generated from ALOS-PALSAR data
and the classified map generated gave the same result as the classified map
generated from backscattering coefficient of L-band PALSAR data. No
additional information was obtained from texture measures.
As the classified map generated from ASAR data was not able to
discriminate agriculture and forests, computation of texture measures was
carried out. The results suggest the possible use and scope of single date
and single polarized C band SAR backscatter and SAR-derived texture
measures for vegetation type classification.

112
5.3 CONCLUSIONS:
In the present study, three techniques for vegetation classification were
carried out. These techniques successfully discriminated land cover classes
viz., agriculture, barren, moist deciduous forests, teak mixed forests (multi-
sensor fusion); open forests, dense forests, scrub (using texture measures);
teak plantations (using first order statistics). Based on the observations and
experience in three study areas, we can say that these methods are not
universal in nature. The classification accuracy depends on many factors
viz., behavior of target with the sensor, season of the acquisition, contrast of
backscatter among different land cover classes.
The vegetation classification can be still enhanced with the use of
interferometric spaceborne SAR data and polarimetric airborne SAR data
techniques which are discussed in next chapters.
Top Related