





![Computer Programming C++ [UTHM]](https://static.fdocuments.in/doc/165x107/55cf981b550346d033959ee7/computer-programming-c-uthm.jpg)

Languages
Pages
Legal


BDA 30703
INTRODUCTION
to
INSTRUMENTATION and MEASUREMENT

INTRODUCTION
Measurement is the process of determining the amount, degree or capacity by comparison with the accepted standards of the system units being used.
Instrumentation is a technology of measurement which serves sciences, engineering, medicine and etc.
Instrument is a device for determining the value or magnitude of a quantity or variable.
Electronic instrument is based on electrical or electronic principles for its measurement functions.

ELECTRONIC INSTRUMENT
1) Transducer
- convert a non electrical signal into an electrical signal
2) Signal modifier
- convert input signal into a suitable signal for the indicating
device (e.g amplifier)
3) Indicating device
- indicates the value of quantity being measure (e.g ammeter)
TransducerSignal
ConditioningIndicating
Device
• Basic elements of an electronics instrument
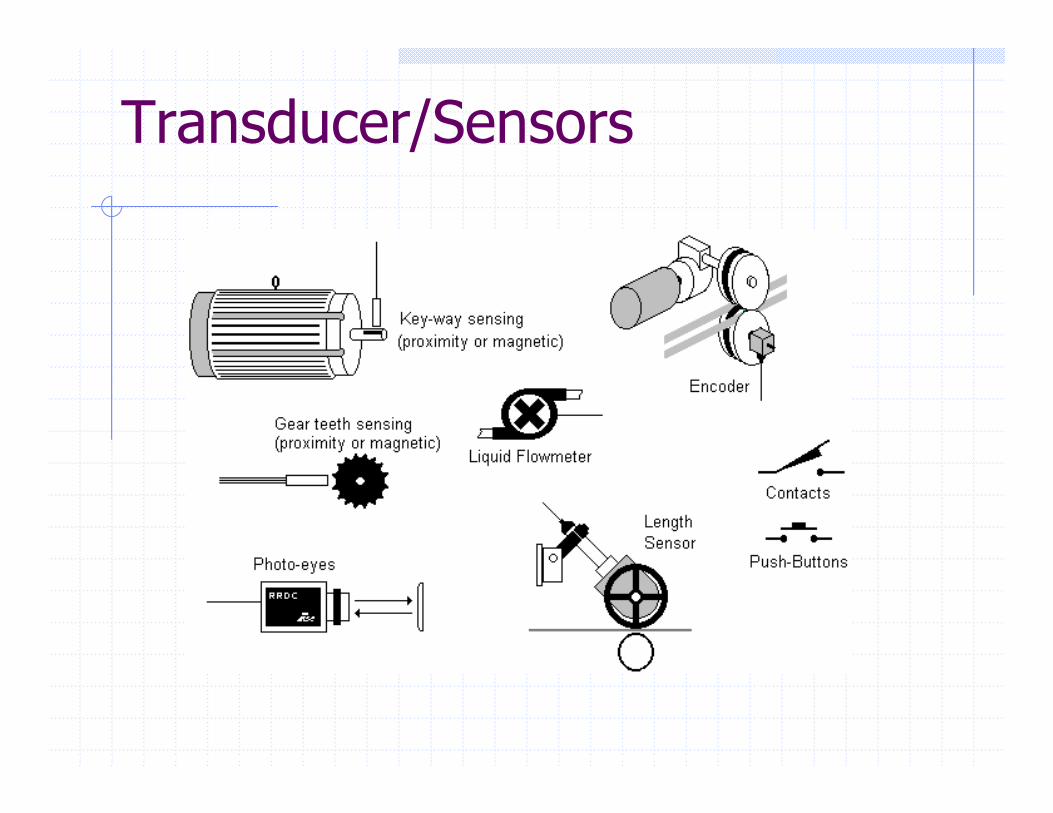
Transducer/Sensors
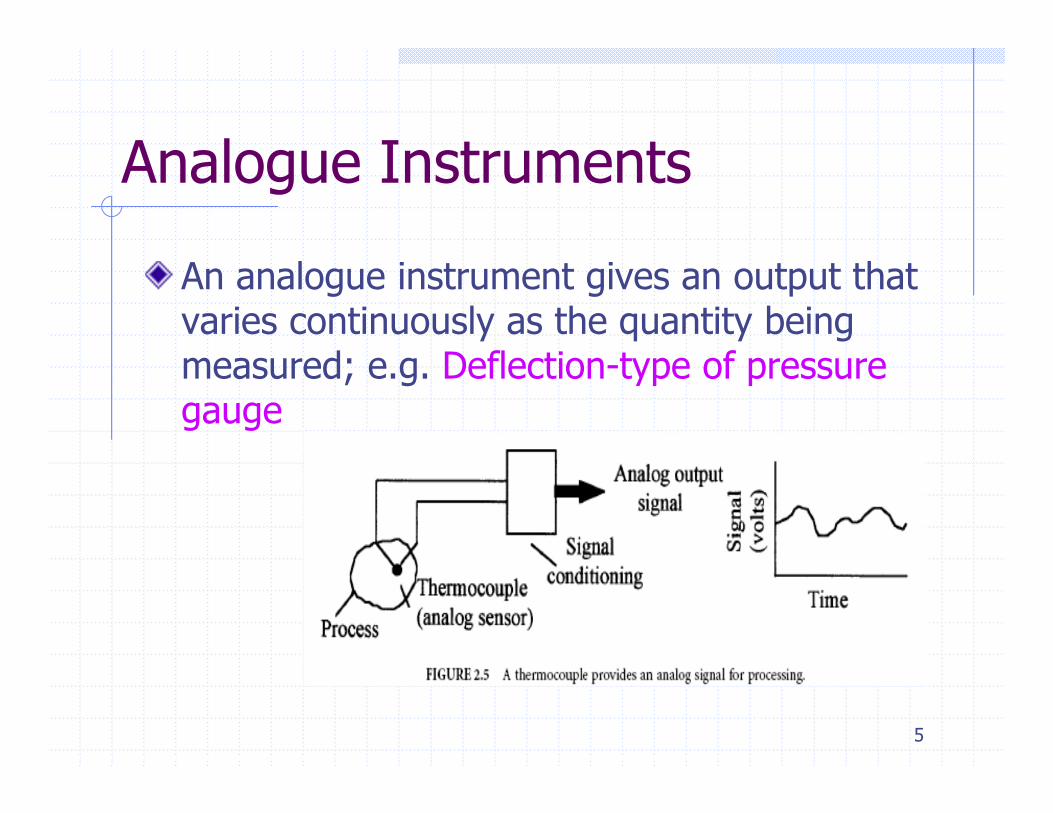
An analogue instrument gives an output that varies continuously as the quantity being measured; e.g. Deflection-type of pressure gauge
5
Analogue Instruments
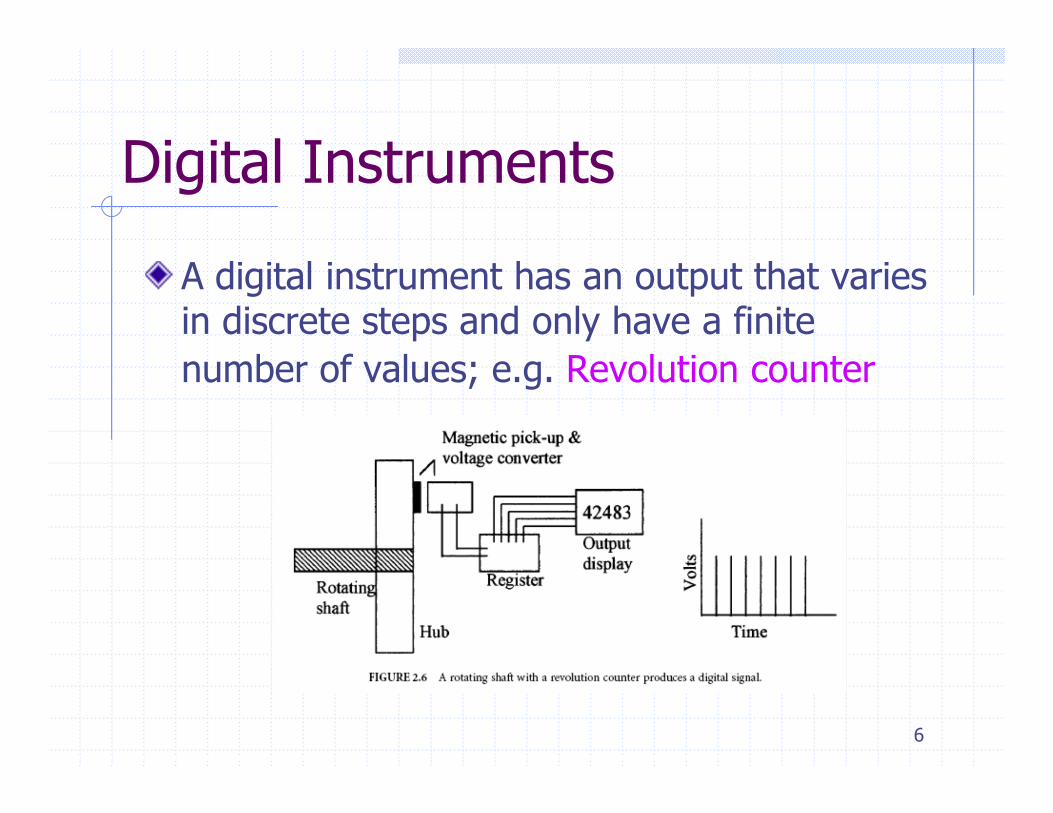
A digital instrument has an output that varies in discrete steps and only have a finite
number of values; e.g. Revolution counter
6
Digital Instruments

Sensor Outputs

FUNCTIONS
The 3 basic functions of instrumentation :-
Indicating – visualize the process/operation
Recording – observe and save the measurement reading
Controlling – to control measurement and process

PERFORMANCE CHARACTERISTICS
Performance Characteristics - characteristics that show the performance of an instrument.
Eg: accuracy, precision, resolution, sensitivity.
Allows users to select the most suitable instrument for a specific measuring jobs.
Two basic characteristics :
Static
Dynamic

Static Characteristic of Instruments
Accuracy – the degree of exactness of measurement compared to the expected value.
Resolution – the smallest change in a measurement variable to which an instrument will respond.
Precision – a measure of consistency or repeatability of measurement.
Error – the deviation of the true value from the desired value.
Sensitivity – ratio of change in the output of instrument to a change of input or measured variable.
Tolerance - maximum deviation of a component from some specified value.
Range or span - minimum and maximum values of a quantity that the instrument is designed to measure.
Linearity - output reading of an instrument that is linearly proportional to the quantity being measured
Measurement Sensitivity -measure of the change in instrument output that occurs when the quantity being measured changes by a given amount.
Threshold – minimum scale of measurement.
Sensitivity to disturbance – measurement magnitude due to disturbance (zero drfit & sensitivity drift).
Zero drift is the measurement reading when no input is given.
Sensitivity drift is the measurement sensitivity difference when the ambient varies.
Hysteresis, Dead space

11
Accuracy vs Precision
(a) Low precision,
low accuracy
(b) Precise not accurate
(c) Precise and accurate
Three industrial robots were programmed to place componentsat a particular point on a table. The target point was the centerof a circle shown below. The results are:

ERROR IN MEASUREMENT
Measurement always introduce error
Error may be expressed either as absolute or percentage of error
Absolute error, e =
where – expected value
– measured value
% error =
Yn : expected value
Xn : measured value
100×−
nY
nX
nY
nXnY −
nX
nY

ERROR IN MEASUREMENT
Relative accuracy,
% Accuracy, a = 100% - % error
=
n
nn
Y
XYA
−−=1
100×A

Example;
Given expected voltage value across a resistor is 80V but the measured voltage is 79V. Calculate,
i. The absolute error
ii. The % of error
iii. The relative accuracy
iv. The % of accuracy

Solution
Given that , expected value = 80Vmeasurement value = 79V
i. Absolute error, e = = 80V – 79V = 1V
ii. % error = = = 1.25%
iii. Relative accuracy, = 0.9875
iv. % accuracy, a = A x 100% = 0.9875 x 100% = 98.75%
nXnY −
10080
7980×
−100×
−
nY
nX
nY
n
nn
Y
XYA
−−=1

STATIC CHARACTERISTICS ~ Measurement Sensitivity
Example 1
The following pressure values, y (mmHg) of a Piezoelectric Device were measured
at a range of temperatures, x (oC). Determine the measurement sensitivity of the
instrument
in mmHg /°C.
Soluition;
For a change in temperature of 5 oC , the change in pressure is 13.1 mmHg. Hence
the measurement sensitivity ;
= 13.1 mmHg/5 oC
= 2.62 mmHg/ oC

STATIC CHARACTERISTICS ~ Sensitivity to disturbance
Example 2
A pressure-sensitive instrument gives the following reading at 10°C ambient temperature.
Then the instrument is used at different ambient temperature (20°C) and give the following reading.
Determine the zero drift and sensitivity drift per °C change in ambient temperature
Pressure
(Psi)
0 1 2 3
Elongation
(mm)
0 15 30 45
Pressure
(Psi)
0 1 2 3
Elongation
(mm)
2 22 42 62

STATIC CHARACTERISTICS ~ Sensitivity to disturbance
Example 2 (Solution)
At 10°C, the elongation/pressure is a straight line. Measurement sensitivity is 15 mm/psi.At 20°C, the elongation/pressure is a straight line. Measurement sensitivity is 20 mm/psi.
Zero drift = 2 mm (no-pressure elongation)Sensitivity drift = Difference of Measurement Sensitivity = 20 mm/psi - 15 mm/psi
= 5 mm/psiZero drift/°C = 2 mm / 10°C = 0.2 mm/°C
Measurement Sensitivity/°C =5 mm/psi/ 10°C = 0.5 mm/psi °C

TYPES OF STATIC ERROR
Types of error in measurement:
1) Gross error/human error
2) Systematic Error
3) Random Error
1) Gross Error
- caused by human mistakes in reading/using instruments
- cannot eliminate but can minimize

TYPES OF STATIC ERROR (cont)
2) Systematic Error
- due to shortcomings of the instrument (such as
defective or worn parts)
- 3 types of systematic error :-
(i) Instrumental error
(ii) Environmental error
(iii) Observational error, e.g; parallax error

TYPES OF STATIC ERROR (cont)
3) Random error
- due to unknown causes, occur when all systematic
error has accounted.
- E.g. +ve & -ve errors in approximately equal numbers.
for a series of measurements made of the same quantity
- accumulation of small effect, require at high degree
of accuracy.
- caused by unpredictable variations in the measurement
system.
- can be avoided by;
(a) increasing number of reading
(b) use statistical means to obtain best approximation of true value

Measurement Systems with Electrical Signals
• displacement,• linear velocity,• Angular• velocity,• acceleration,• force,• pressure,• temperature,• heat flux,• humidity, • fluid flow rate,• light intensity,• Chemical
Characteristic• chemical
composition.
• Amplification
• Attenuation
• Filtering (highpass,
Iowpass, bandpass, or
bandstop)
• Differentiation
• Integration
• Linearization
• Converting a resistance to
a voltage signal
• Converting a current signal
to a voltage signal
• gage,• cell,• pickup,• Transmitter
Converts physical changes to electrical pulses
• Display• Screen• Metering• Scales• Systems
More than one signal-conditioning function, such as amplification and filtering, can
be performed on a signal.
Operational Amplifier Applications
Audio amplifiers
Speakers and microphone circuits in cell phones, computers, mpg players, boom boxes, etc.
Instrumentation amplifiers
Biomedical systems including heart monitors and oxygen sensors.
Power amplifiers
Analog computers
Combination of integrators, differentiators, summing amplifiers, and multipliers

What is an Op-Amp? – The
Surface• An Operational Amplifier (Op-Amp) is an integrated circuit that
uses external voltage to amplify the input through a very high
gain.
• We recognize an Op-Amp as a mass-produced component
found in countless electronics.
What an Op-Amp looks
like to a lay-person
What an Op-Amp looks
like to an engineer

Ideal Operational Amplifier
Operational amplifier (Op-amp) is made of many transistors,
diodes, resistors and capacitors in integrated circuit technology.
Ideal op-amp is characterized by:
Infinite input impedance
Infinite gain for differential input
Zero output impedance
Infinite frequency bandwidth

Terminals on an Op Amp
Non-inverting Input terminal
Inverting inputterminal
Output terminal
Positive power supply (Positive rail)
Negative power supply (Negative rail)

Winter 2012
UCSD: Physics 121; 2012
27
Op-Amp Introduction
• Op-amps (amplifiers/buffers in general) are drawn as a triangle in a circuit schematic
• There are two inputs– inverting and non-inverting
• And one output
• Also power connections (note no explicit ground)
−
+
2
3 4
7
6
divot on pin-1 end
inverting input
non-inverting input
V+
V−
output
Winter 2012
UCSD: Physics 121; 2012
28
The ideal op-amp
• Infinite voltage gain– a voltage difference at the two inputs is magnified infinitely
– in truth, something like 200,000
– means difference between + terminal and − terminal is amplified by 200,000!
• Infinite input impedance– no current flows into inputs
– in truth, about 1012 Ω for FET input op-amps
• Zero output impedance– rock-solid independent of load
– roughly true up to current maximum (usually 5–25 mA)
• Infinitely fast (infinite bandwidth)– in truth, limited to few MHz range
– slew rate limited to 0.5–20 V/µs

Winter 2012
UCSD: Physics 121; 2012
29
Op-amp without feedback
• The internal op-amp formula is:
Vout = gain×(V+ − V−)
• So if V+ is greater than V−, the output goes positive
• If V− is greater than V+, the output goes negative
• A gain of 200,000 makes this device (as illustrated
here) practically useless
−
+
V−
V+
Vout

Winter 2012
UCSD: Physics 121; 2012
30
Infinite Gain in negative feedback
• Infinite gain would be useless except in the self-
regulated negative feedback regime
– negative feedback seems bad, and positive good—but in electronics positive feedback means runaway or oscillation, and negative feedback leads to stability
• Imagine hooking the output to the inverting terminal:
• If the output is less than Vin, it shoots positive
• If the output is greater than Vin, it shoots negative
– result is that output quickly forces itself to be exactly Vin
−
+Vin
negative feedback loop
Winter 2012
UCSD: Physics 121; 2012
31
Op-Amp “Golden Rules”
• When an op-amp is configured in any negative-
feedback arrangement, it will obey the following two
rules:
– The inputs to the op-amp draw or source no current (true whether negative feedback or not)
– The op-amp output will do whatever it can (within its limitations) to make the voltage difference between the two inputs zero

UCSD: Physics 121; 2012
Inverting Op-Amp
• Applying the rules: − terminal at “virtual ground”
– so current through R1 is If = Vin/R1
• Current does not flow into op-amp (one of our rules)
– so the current through R1 must go through R2
– voltage drop across R2 is then IfR2 = Vin×(R2/R1)
• So Vout = 0 − Vin×(R2/R1) = −Vin×(R2/R1);
Vout = −−−−Vin××××(R2/R1)
• Thus we amplify Vin by factor −R2/R1
– negative sign earns title “inverting” amplifier
−
+
Vin
Vout
R1
R2

UCSD: Physics 121; 2012
33
Inverting Op-Amp example
−
+
Vin
Vout
R1
R2
If Vin is 0.2V, R1 = 10 kΩ and R2 = 150 kΩ , calculate the output voltage Vout
and the current on R1.
Solution.This is an inverting Op-Amp, Vout = -Vin x R2/R1 = -0.2 x 150/10 = - 3 V.
Current on R1,I1 = Vin/R1 = 0.2 V /(10 x 1000 Ω) = 0.00002 A = 20 µA.
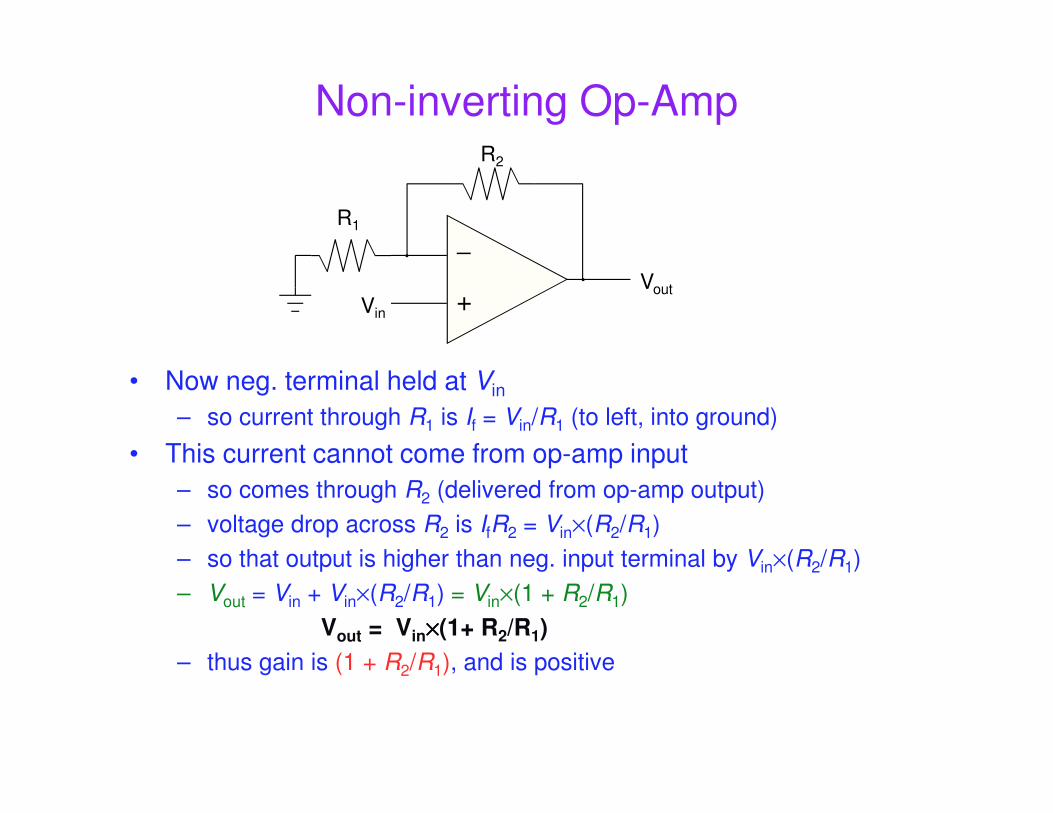
Non-inverting Op-Amp
• Now neg. terminal held at Vin
– so current through R1 is If = Vin/R1 (to left, into ground)
• This current cannot come from op-amp input
– so comes through R2 (delivered from op-amp output)
– voltage drop across R2 is IfR2 = Vin×(R2/R1)
– so that output is higher than neg. input terminal by Vin×(R2/R1)
– Vout = Vin + Vin×(R2/R1) = Vin×(1 + R2/R1)
Vout = Vin××××(1+ R2/R1)
– thus gain is (1 + R2/R1), and is positive
−
+Vin
Vout
R1
R2

Non-inverting Op-Amp example.
−
+Vin
Vout
R1
R2
If Vin is 0.2V, R1 = 10 kΩ and R2 = 150 kΩ , calculate the output voltage Vout
and the current on R1.
Solution.This is an inverting Op-Amp, Vout = Vin x (1+ R2/R1 = 0.2 x (1+150/10) = 3.2 V.
Current on R1,I1 = Vin/R1 = 0.2 V /(10 x 1000 Ω) = 0.00002 A = 20 µA.

Applications of Op-Amps• Electrocardiogram (EKG) Amplification
– Need to measure difference in voltage from lead 1 and lead 2
– 60 Hz interference from electrical equipment

Microphone Pre-Amp
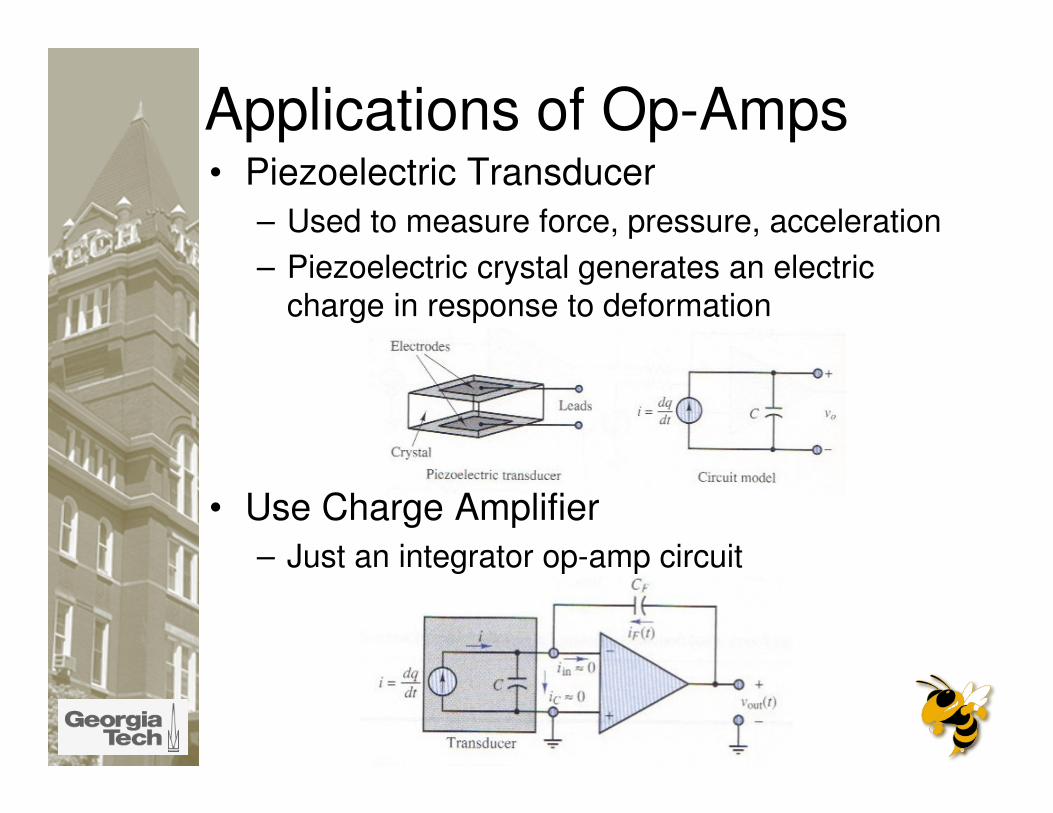
Applications of Op-Amps• Piezoelectric Transducer
– Used to measure force, pressure, acceleration
– Piezoelectric crystal generates an electric
charge in response to deformation
• Use Charge Amplifier
– Just an integrator op-amp circuit

•Goal is to have VSET = VOUT
•Remember that VERROR = VSET – VSENSOR
•Output Process uses VERROR from the PID controller to adjust Vout such that it is ~VSET
P
I
D
Output
Process
Sensor
VERRORVSETVOUT
VSENSOR
PID Controller – System Block
Diagram

ApplicationsPID Controller – System Circuit Diagram
Source:
http://www.ecircuitcenter.com/Circuits/op_pid/op_pid.htm
Calculates VERROR = -(VSET + VSENSOR)
Signal conditioning allows you to
introduce a time delay which could
account for things like inertia
System to control
-VSENSOR

ApplicationsPID Controller – PID Controller Circuit Diagram
VERR
Adjust Change
Kp RP1, RP2
Ki RI, CI
Kd RD, CD
VERR PID
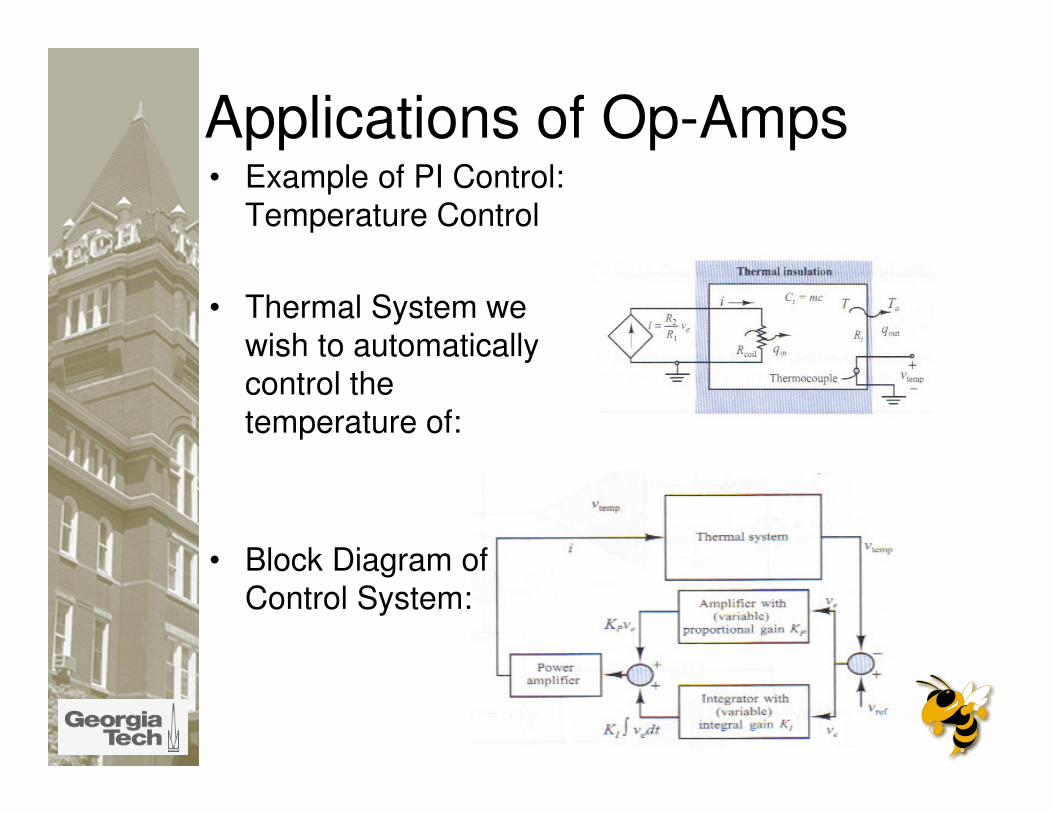
Applications of Op-Amps• Example of PI Control:
Temperature Control
• Thermal System we
wish to automatically
control the
temperature of:
• Block Diagram of
Control System:

Applications of Op-Amps
• Voltage
Error
Circuit:
• Proportion
al-Integral
(PI)
Control
Circuit:
• Example of PI Control: Temperature Control

741 Op-Amp in the Circuit

741 Op-Amp Schematic
differential amplifier high-gain amplifier
voltage
level
shifteroutput
stage
current mirror
current mirror current mirror
Revisit/Recap
1. Parallel/Series spring & damper.2. 2nd order Nyquist plots
Top Related