





Languages
Pages
Legal


ES159/259
Ch. 3: Forward and Inverse Kinematics

ES159/259
Updates
• Document clarifying the Denavit-Hartenberg convention is posted • Labs and section times announced
– If you haven’t already, please forward your availability to Shelten & Ben • Matlab review session Tuesday 2/13, 6:00 MD 221

ES159/259
Recap: The Denavit-Hartenberg (DH) Convention
• Representing each individual homogeneous transformation as the product of four basic transformations:
−
−
=
−
−
=
=
10000
100000000001
100001000010
001
1000100
00100001
100001000000
,,,,
i
i
i
i
i
xaxdzzi
dcssascccscasscsc
cssc
a
dcssc
A
ii
iiiiii
iiiiii
ii
iiii
ii
iiii
αα
θαθαθθ
θαθαθθ
αα
ααθθ
θθ
αθ RotTransTransRot

ES159/259
Recap: the physical basis for DH parameters
• ai: link length, distance between the o0 and o1 (projected along x1) • αi: link twist, angle between z0 and z1 (measured around x1) • di: link offset, distance between o0 and o1 (projected along z0) • θi: joint angle, angle between x0 and x1 (measured around z0)

ES159/259
General procedure for determining forward kinematics
1. Label joint axes as z0, …, zn-1 (axis zi is joint axis for joint i+1) 2. Choose base frame: set o0 on z0 and choose x0 and y0 using right-
handed convention 3. For i=1:n-1,
i. Place oi where the normal to zi and zi-1 intersects zi. If zi intersects zi-1, put oi at intersection. If zi and zi-1 are parallel, place oi along zi such that di=0
ii. xi is the common normal through oi, or normal to the plane formed by zi-1 and zi if the two intersect
iii. Determine yi using right-handed convention 4. Place the tool frame: set zn parallel to zn-1 5. For i=1:n, fill in the table of DH parameters 6. Form homogeneous transformation matrices, Ai 7. Create Tn
0 that gives the position and orientation of the end-effector in the inertial frame

ES159/259
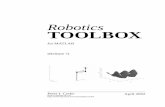
Example 2: three-link cylindrical robot
• 3DOF: need to assign four coordinate frames 1. Choose z0 axis (axis of rotation for joint 1, base frame) 2. Choose z1 axis (axis of translation for joint 2) 3. Choose z2 axis (axis of translation for joint 3) 4. Choose z3 axis (tool frame)
• This is again arbitrary for this case since we have described no wrist/gripper • Instead, define z3 as parallel to z2

ES159/259
Example 2: three-link cylindrical robot
• Now define DH parameters – First, define the constant parameters ai, αi – Second, define the variable parameters θi, di
link ai αi di θi
1 0 0 d1 θ1
2 0 -90 d2 0
3 0 0 d3 0
=
−=
−
=
1000100
00100001
1000010
01000001
1000100
0000
33
22
1
11
11
1 dA
dA
dcssc
A , ,
+−
−−
==
1000010
00
21
3111
3111
3210
3 dddccsdssc
AAAT

ES159/259
Example 3: spherical wrist
• 3DOF: need to assign four coordinate frames – yaw, pitch, roll (θ4, θ5, θ6) all intersecting at one point o (wrist center) 1. Choose z3 axis (axis of rotation for joint 4) 2. Choose z4 axis (axis of rotation for joint 5) 3. Choose z5 axis (axis of rotation for joint 6) 4. Choose tool frame:
• z6 (a) is collinear with z5
• y6 (s) is in the direction the gripper closes • x6 (n) is chosen with a right-handed convention

ES159/259
Example 3: spherical wrist
link ai αi di θi
4 0 -90 0 θ4
5 0 90 0 θ5
6 0 0 d6 θ6
• Now define DH parameters – First, define the constant parameters ai, αi – Second, define the variable parameters θi, di
−
=
−
−
=
−
−
=
1000100
0000
100000100000
100000100000
6
66
66
655
55
544
44
4 dcssc
Acssc
Acssc
A , ,
−+−+−−−
==
10006556565
654546465464654
654546465464654
6543
6 dcccscsdssssccscsscccsdscsccssccssccc
AAAT

ES159/259
Example 4: cylindrical robot with spherical wrist
• 6DOF: need to assign seven coordinate frames – But we already did this for the previous two examples, so we can fill in the
table of DH parameters:
link ai αi di θi
1 0 0 d1 θ1
2 0 -90 d2 0
3 0 0 d3 0
4 0 -90 0 θ4
5 0 90 0 θ5
6 0 0 d6 θ6
o3, o4, o5 are all at the same point oc

ES159/259
Example 4: cylindrical robot with spherical wrist
• Note that z3 (axis for joint 4) is collinear with z2 (axis for joint 3), thus we can make the following combination:
==
1000333231
232221
131211
36
03
06
z
y
x
drrrdrrrdrrr
TTT
21654
316516541
316516541
5433
5154123
5154113
6465432
651641654122
651641654112
6465431
651641654121
651641654111
dddssddcdccdscsddsdcsdsccd
ssrccscsrcssccrccccsr
cscssssccsrcsscscscccr
scccsrcscssscccsrcsssscccccr
z
y
x
++−=
++=
−−=
−=
+=
−=
−=
+−−=
−−−=
−−=
−−=
+−=

ES159/259
Example 5: the Stanford manipulator
• 6DOF: need to assign seven coordinate frames: 1. Choose z0 axis (axis of rotation for joint 1, base frame) 2. Choose z1-z5 axes (axes of rotation/translation for joints 2-6) 3. Choose xi axes 4. Choose tool frame 5. Fill in table of DH parameters:
link ai αi di θi
1 0 -90 0 θ1
2 0 90 d2 θ2
3 0 0 d3 0
4 0 -90 0 θ4
5 0 90 0 θ5
6 0 0 d6 θ6

ES159/259
Example 5: the Stanford manipulator
• Now determine the individual homogeneous transformations:
−
=
−−
=
−
−
=
=
−
=
−
−
=
1000100
0000
100000100000
100000100000
1000100
00100001
1000010
0000
100000100000
6
66
66
655
55
544
44
4
33
2
22
22
211
11
1
dcssc
Acs
sc
Acssc
A
dA
dcs
sc
Acssc
A
, ,
, ,

ES159/259
Example 5: the Stanford manipulator
• Finally, combine to give the complete description of the forward kinematics:
=⋅⋅⋅=
1000333231
232221
131211
610
6z
y
x
drrrdrrrdrrr
AAT
( )[ ] ( )( )[ ] ( )
( )( )[ ] ( )
( )[ ] ( )( )( )( )
( )( )
( )52452632
2155142541621321
5412515421621321
5254233
54152542123
54152542113
65264654232
646541652646542122
646541652646542112
65264654231
646541652646542121
646542652646542111
sscccddcdsscssccsscddcdssdssssccscccddsdscd
ccscsrssccssccsrssscsscccrssccssccsr
scscscssscsscccsrccscssssscssccccr
cscsscccsrscccsccssssccccsrscccsdcsssscccccr
z
y
x
−+=
++++=
−++−=
+−=
++=
−+=
++=
+−+−−−−=
+−−++−=
−−−=
++−−=
+−−−=

ES159/259
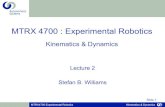
Example 6: the SCARA manipulator
• 4DOF: need to assign five coordinate frames: 1. Choose z0 axis (axis of rotation for joint 1, base frame) 2. Choose z1-z3 axes (axes of rotation/translation for joints 2-4) 3. Choose xi axes 4. Choose tool frame 5. Fill in table of DH parameters:
link ai αi di θi
1 a1 0 0 θ1
2 a2 180 0 θ2
3 0 0 d3 0
4 0 0 d4 θ4

ES159/259
Example 6: the SCARA manipulator
• Now determine the individual homogeneous transformations:
−
=
=
−−
=
−
=
1000100
0000
1000100
00100001
10000100
00
10000100
00
4
44
44
43
32222
2222
21111
1111
1 dcssc
Ad
Asacscasc
Asacscasc
A , , ,
−−−+−−−++−+
=⋅⋅⋅=
1000100
00
43
12211412412412412
12211412412412412
410
4 ddsasaccsssccscacacsscsscc
AAT

ES159/259
Forward kinematics of parallel manipulators
• Parallel manipulator: two or more series chains connect the end-effector to the base (closed-chain)
• # of DOF for a parallel manipulator determined by taking the total DOFs for all links and subtracting the number of constraints imposed by the closed-chain configuration
• Gruebler’s formula (3D):
( ) ∑=
+−=jn
iijL fnn
16DOF#
number of links*
*excluding ground
number of joints
#DOF for joint i

ES159/259
Forward kinematics of parallel manipulators
• Gruebler’s formula (2D):
• Example (2D): – Planar four-bar, nL = 3, nj = 4, fi = 1(for all joints)
• 3(3-4)+4 = 1DOF – Forward kinematics:
( ) ∑=
+−=jn
iijL fnn
13DOF#
( ) 2tan
2
22cos1
21
22
21
22
21 π
δδ
δδθ −
−
+
+−
+−= −−
LL
LL
L

ES159/259
Inverse Kinematics
• Find the values of joint parameters that will put the tool frame at a desired position and orientation (within the workspace)
– Given H:
– Find all solutions to:
– Noting that:
– This gives 12 (nontrivial) equations with n unknowns
( )310
SEoR
H ∈
=
( ) HqqT nn =,...,10
( ) ( ) ( )nnnn qAqAqqT ⋅⋅⋅= 1110 ,...,

ES159/259
• For a given H:
• Find θ1, θ2, d3, θ4, θ5, θ6:
• One solution: θ1 = π/2, θ2 = π/2, d3 = 0.5, θ4 = π/2, θ5 = 0, θ6 = π/2
−
=
10000001763.0100154.0010
H
Example: the Stanford manipulator
( )[ ] ( )( )[ ] ( )
( )( )[ ] ( )( )[ ] ( )
( )( )( )
( )( )
( ) 0763.0
154.0010001100
52452632
2155142541621321
5412515421621321
52542
541525421
541525421
652646542
6465416526465421
6465416526465421
652646542
6465416526465421
6465426526465421
=−+
=++++
−=−++−
=+−
=++
=−+
=++
=+−+−−−−
=+−−++−
=−−−
=++−−
=+−−−
sscccddcsscssccsscddcdssssssccscccddsdscccscsssccssccsssscsscccssccssccs
scscscssscsscccsccscssssscsscccccscsscccsscccsccssssccccsscccsdcssssccccc

ES159/259
Inverse Kinematics
• The previous example shows how difficult it would be to obtain a closed-form solution to the 12 equations
• Instead, we develop systematic methods based upon the manipulator configuration
• For the forward kinematics there is always a unique solution – Potentially complex nonlinear functions
• The inverse kinematics may or may not have a solution – Solutions may or may not be unique – Solutions may violate joint limits
• Closed-form solutions are ideal!

ES159/259
Overview: kinematic decoupling
• Appropriate for systems that have an arm a wrist – Such that the wrist joint axes are aligned at a point
• For such systems, we can split the inverse kinematics problem into two parts:
1. Inverse position kinematics: position of the wrist center 2. Inverse orientation kinematics: orientation of the wrist
• First, assume 6DOF, the last three intersecting at oc
• Use the position of the wrist center to determine the first three joint angles…
( )( ) oqqo
RqqR
=
=
6106
6106
,...,,...,

ES159/259
Overview: kinematic decoupling
• Now, origin of tool frame, o6, is a distance d6 translated along z5 (since z5 and z6 are collinear)
– Thus, the third column of R is the direction of z6 (w/ respect to the base frame) and we can write:
– Rearranging:
– Calling o = [ox oy oz]T, oc0 = [xc yc zc]T
+==
100
606 Rdooo o
c
−=
100
6Rdoooc
−−−
=
336
236
136
rdordordo
zyx
z
y
x
c
c
c

ES159/259
Overview: kinematic decoupling
• Since [xc yc zc]T are determined from the first three joint angles, our forward kinematics expression now allows us to solve for the first three joint angles decoupled from the final three.
– Thus we now have R30
– Note that:
– To solve for the final three joint angles:
– Since the last three joints for a spherical wrist, we can use a set of Euler angles to solve for them
36
03RRR =
( ) ( ) RRRRR T03
103
36 ==
−

ES159/259
Inverse position
• Now that we have [xc yc zc]T we need to find q1, q2, q3 – Solve for qi by projecting onto the xi-1, yi-1 plane, solve trig problem – Two examples: elbow (RRR) and spherical (RRP) manipulators – For example, for an elbow manipulator, to solve for θ1, project the arm onto
the x0, y0 plane

ES159/259
Background: two argument atan
• We use atan2(·) instead of atan(·) to account for the full range of angular solutions
– Called ‘four-quadrant’ arctan
( )
( )
==
=>
≥≥
<≥
−−
<−−
=
0,0
0,02
0,0
0,0
0,2
,2
xy
xy
xyxy
xyxy
yxy
xy
undefined
atan
atan
atan
atan
π
π

ES159/259
Example: RRR manipulator
1. To solve for θ1, project the arm onto the x0, y0 plane
– Can also have: • This will of course change the solutions for θ2 and θ3
( )cc yx ,21 atan=θ
( )cc yx ,21 atan+= πθ

ES159/259
• If there is an offset, then we will have two solutions for θ1: left arm and right arm
– However, wrist centers cannot intersect z0
• If xc=yc=0, θ1 is undefined – i.e. any value of θ1 will work
Caveats: singular configurations, offsets

ES159/259
• Left arm: • Right arm:
Left arm and right arm solutions
( )
−+=
==
ddyx
yx
cc
cc
,2
,2222
1
atan
atan-
α
φαφθ ( )
−−+−=
−++=
=+=
ddyx
ddyx
yx
cc
cc
cc
,2
,2
,2
222
222
1
atan
atan
atan
πβ
αβαθ

ES159/259
• Therefore there are in general two solutions for θ1
• Finding θ2 and θ3 is identical to the planar two-link manipulator we have seen previously:
• Therefore we can find two solutions for θ3:
Left arm and right arm solutions
( ) Daa
aadzdyx
dzsdyxr
aaaasr
ccc
c
cc
≡−−−+−+
=⇒
−=
−+=
−−+=
32
23
22
21
222
3
1
2222
32
23
22
22
3
2cos
2cos
θ
θ
( )23 1,2 DD −±= atanθ

ES159/259
• The two solutions for θ3 correspond to the elbow-down and elbow-up positions respectively
• Now solve for θ2:
• Thus there are two solutions for the pair (θ2, θ3)
Left arm and right arm solutions
( ) ( )( )333321
222
333322
,2,2
,2,2
sacaadzdyx
sacaasr
ccc +−
−−+=
+−=
atanatan
atanatanθ

ES159/259
• In general, there will be a maximum of four solutions to the inverse position kinematics of an elbow manipulator
– Ex: PUMA
RRR: Four total solutions

ES159/259
• Spherical configuration – Solve for θ1 using same method as with RRR
– Again, if there is an offset, there will be left-arm and right-arm solutions – Solve for θ2:
– Solve for d3:
Example: RRP manipulator
( )cc yx ,21 atan=θ
( )
1
222
2 ,2
dzsyxr
rs
c
cc
−=
+=
= atanθ
( )21
22
223
dzyx
srd
ccc −++=
+=

ES159/259
Next class…
• Complete the discussion of inverse kinematics – Inverse orientation – Introduction to other methods
• Introduction to velocity kinematics and the Jacobian
Top Related