







Languages
Pages
Legal


Your systems. Working as one.
An Extensible Architecture for Avionics Sensor Health Assessment Using DDS
Sumant Tambe, Ph.D.
Senior Software Research Engineer
Real-Time Innovations, Inc.
12/3/2013
Infotech@Aerospace 19 - 22 August 2013 Boston, Massachusetts
Acknowledgement: This research is funded by the Air Force Research Laboratory, WPAFB, Dayton, OH under Small Business Innovation Research (SBIR) contract # FA8650-11-C-1054. Manuscript approved for publication by WPAFB: PA Approval Number: 88ABW-2013-3209.

12/3/2013 © 2012 RTI • COMPANY CONFIDENTIAL 2
NASA K10 Rover: Surface Telerobotics
Uses RTI Connext DDS

Why NASA Uses RTI Connext DDS
• NASA was looking for a software architecture and communications infrastructure that enabled reliable, standards-based messaging between the International Space Station and Earth.
• NASA relied on the RTI Connext DDS solution because of its ability to tolerate time delay and loss of signal.
• A common, flexible, interoperable data communications interface that would readily integrate across each robot’s disparate applications and operating systems.
12/3/2013 © 2013 Real-time Innovations, Inc. 3

Data-Centric Architecture of DDS
12/3/2013 4
Airborne Sensor
DataWriter DataReader
DataReader
DataReader
DDS Global Data Space
Airborne Sensor
DataWriter
Airborne Sensor
DataWriter
Sensor Health Assessment
Sensor ID Velocity X Velocity Y
0x1 12.35 35.45
0x2 1.34 6.78
ID Pitch Roll Yaw
0x3 10 35.5 -45
0x4 10.1 35.5 -30
publish
publish
publish
subscribe
subscribe
subscribe
© 2013 Real-time Innovations, Inc.
Research: Cyber Situational Awareness
• Research is funded by the Air Force Research Laboratory, WPAFB, Dayton, OH
12/3/2013 5 © 2013 Real-time Innovations, Inc.

Context: Cyber Situational Awareness
12/3/2013 6
• Enterprise Security Situational Awareness
• Sensor Health Management
Security Situational
Awareness
Sensor Health Management
Goal Situation (Attack) recognition, comprehension,
projection
Fault Detection, Isolation, Mitigation
Sensors E.g., Host-based and network intrusion detection
systems (OSSEC, Snort, Ganglia), malware
detectors, firewalls, operating system, etc.
E.g., Accelerometer, fuel-flow sensors, altimeter,
speedometer, etc.
Input to
Analysis
Events and Alerts: log analysis, file integrity
checking, policy monitoring, rootkit detection, real-
time alerting and active response
Sensor readings, software status signals, software
quality signals, operating system information
Analysis
Techniques
Complex Event Processing, Classification (Naïve
Bayes, SVM, linear classifiers), clustering (K-
means), pattern matching etc.
Bayesian Networks, Hybrid Bayesian, Timed Fault
Propagation Graphs (TFPG),
Tools/Librari
es
R, Weka Smile and Genie
Visualization Histograms, heat maps, time series Time series
© 2013 Real-time Innovations, Inc.

Sensor Health Management
12/3/2013 7 © 2013 Real-time Innovations, Inc.
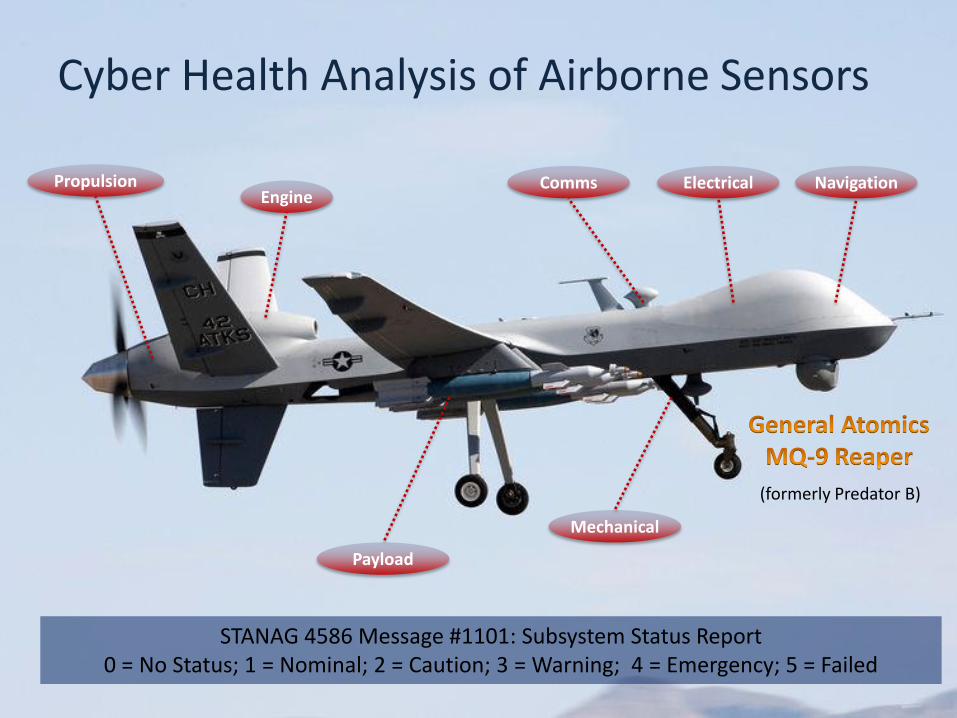
Cyber Health Analysis of Airborne Sensors
Engine
Mechanical
Propulsion Electrical Navigation
Payload
Comms
STANAG 4586 Message #1101: Subsystem Status Report 0 = No Status; 1 = Nominal; 2 = Caution; 3 = Warning; 4 = Emergency; 5 = Failed
(formerly Predator B)
12/3/2013 9
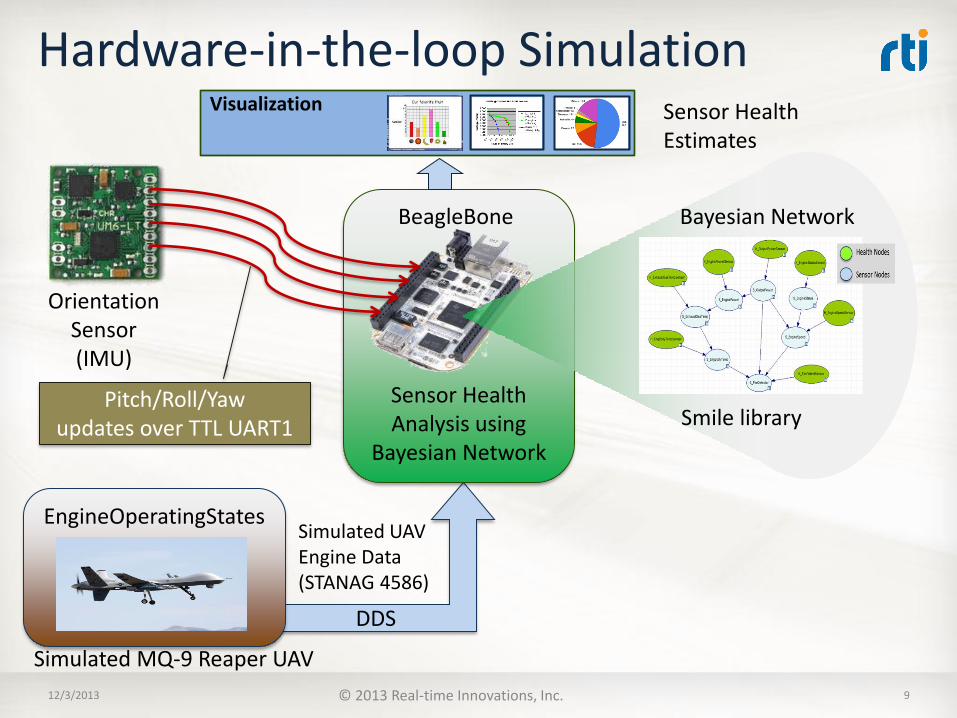
DDS
EngineOperatingStates
Sensor Health Analysis using
Bayesian Network
Simulated UAV Engine Data (STANAG 4586)
Orientation Sensor (IMU)
BeagleBone
Pitch/Roll/Yaw updates over TTL UART1
Bayesian Network
Visualization Sensor Health Estimates
Smile library
Simulated MQ-9 Reaper UAV
Hardware-in-the-loop Simulation
© 2013 Real-time Innovations, Inc.
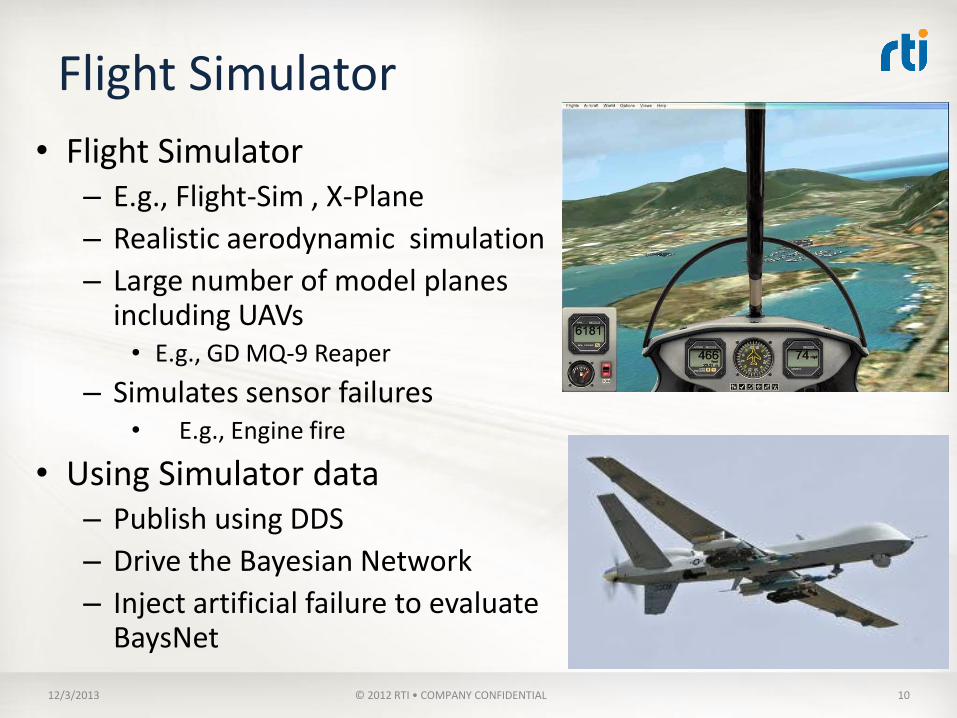
Flight Simulator
• Flight Simulator – E.g., Flight-Sim , X-Plane
– Realistic aerodynamic simulation
– Large number of model planes including UAVs • E.g., GD MQ-9 Reaper
– Simulates sensor failures • E.g., Engine fire
• Using Simulator data – Publish using DDS
– Drive the Bayesian Network
– Inject artificial failure to evaluate BaysNet
12/3/2013 © 2012 RTI • COMPANY CONFIDENTIAL 10

Hardware-in-the-loop Simulation using Orientation Sensors
• Hardware Description – Beaglebone Rev A5 (700 MHz,
256 MB RAM)
– CHR-6dm AHRS Orientation Sensor
– Communication over TTL (3.3V) UART at 115200 Baud
– Onboard Extended Kalman Filter (EKF) produces yaw, pitch, and roll angle estimates
12/3/2013 11
BeagleBone with CHR-6dm (above) CHR-6dm orientation Sensor (below)
© 2013 Real-time Innovations, Inc.

Sensor Health Analysis Using Bayesian Networks
• Bayesian Network based on STANAG 4586
• Sensor dependencies are modeled as an acyclic graphs
• Can learn the structure and parameters from raw data
• Each node has a probability distribution function with respect to its parents
• Raw values of sensor readings are discretized and plugged in
• Health nodes (H_*) give instantaneous probability of sensor being faulty – A real value between 0 to 1
– A value above or below a threshold trigger an alert
12/3/2013 12
Health Nodes Sensor Nodes
© 2013 Real-time Innovations, Inc.

IMU-in-the-loop Simulation (Failure Scenarios)
12/3/2013 13
Replay Starts [0:00]
Engine Catches Fire
[0:57]
Very Low Engine Thrust [1:30] Replay Ends [5:00]
Sub-Scenario #2 Very Low Engine Thrust @ [1:30]
Replay Starts [0:00]
Replay Ends
[5:00]
Sub-Scenario #1 High Engine Thrust
1
2
(Change Pitch and Roll Physically)
(Change Pitch and Roll Physically)
© 2013 Real-time Innovations, Inc.

Extensibility Facilitates System Evolution
12/3/2013 14
struct EngineOperatingStatesSensorsHealth {
double p_engineSpeedSensor_good;
double p_engineSpeedSensor_bad;
double p_exhaustGasTempSensor_good;
double p_exhaustGasTempSensor_bad;
double p_fireDetectionSensor_good;
double p_fireDetectionSensor_bad;
. . .
};// Extensibility(EXTENSIBLE)
struct EngineOperatingStates {
double timestamp;
string vehicleId; //@key
long engineStatus;
double engineSpeed;
double enginePower;
double exhaustGasTemperature;
double engineBodyTemperature;
double outputPower;
long fireDetectionSensor;
};// Extensibility(EXTENSIBLE)
• Evolution – Hardware evolves Software evolves Data-types evolve
– Evolved system components must continue to communicate with unevolved components
– E.g., 2d point (X, Y) evolves to 3d point (X, Y, Z)
– New radar that produces 3d points must work with old display that expects 2d
• Solution: OMG Extensible and Dynamic Topic Types Specification
© 2013 Real-time Innovations, Inc.

Take Home Points
• Bayesian Networks – A flexible and capable platform for fault
detection and diagnosis – Fine-grain fault detection within a
subsystem and across subsystems – Large number of COTS tools
• RTI Connext DDS – Has small footprint
• Runs on a ARM processors (700 MHz, 256MB RAM)
– Has low latency • Supports hardware-in-the-loop simulation
as well as Smart Systems
– Standards-based support for system evolution
12/3/2013 15 © 2013 Real-time Innovations, Inc.

Future Work
1. Expanded Cyber Situational Awareness – Using independent ground-based
sensors
2. Integrate portable and truly interoperable airborne software components – Use RTI Transport Services Segment
(TSS) implementation
3. Semantic Interoperability – Use UAS Control Segment (UCS)
– Protocol Interoperability using DDS (RTPS)
12/3/2013 16 © 2013 Real-time Innovations, Inc.

Thank You!
12/3/2013 17 © 2013 Real-time Innovations, Inc.
Top Related