






Languages
Pages
Legal


International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
61
A Quantitative Method for Dynamic Risk Prediction Using AHP
and Grey Modeling: Case Study of a Mud-Flow Hazard
Li-Jeng, Huang1 *
1
1Department of Civil Engineering, National Kaohsiung University of Applied Sciences,
Kaohsiung 807, Taiwan, R.O.C
Abstract
A quantitative technique for dynamic risk assessment of mud-flow hazards using the
integrated skills of analytical hierarchy process (AHP) and grey modelling theory (GM)
is developed and verified with a real case occurred in Taiwan. Theoretical model of AHP
is first built for risk assessment of mud-flow hazards in which 9 important influence
factors considering topological, metrological and rain-fall conditions are selected and
their relative risk impacts are analyzed. Among these 9 influence factors the GM(1,1)
models are employed for intensity of rainfall and accumulated rainfall while linear model
is employed for duration of rainfall for prediction. Two predicted schemes are proposed:
(1) Single-step prediction (SSP) scheme, and (2) Recycling point-wise prediction (RPP)
scheme. The real case of mud-flow disasters occurred in Taiwan is tested by the use of
AHP/GM: the mud-flow occurred in Tung-Shing village, Hua-lien, July 10-11, 1994. The
results show that the proposed AHP/GM integrated quantitative dynamic risk assessment
schemes can provide early precaution, warning and alarming in time for the occurrence
of mud flow disaster. Using appropriate grey modeling for dynamic influence factors as
well as AHP framework and criteria can successfully predict the risk change of mud-flow
hazards.
Keywords: Mud-flow; Analytical Hierarchy Process (AHP); Grey Modeling (GM);
Grey Prediction; Dynamic Risk Assessment
Nomenclature
][B comparison matrix of influence factors in criteria layer
][C comparison matrix of influence factors in sub-criteria layer
]ˆ[C state-to-output transformation matrix containing relative risk impact (RRI)
}{E judgment vector of evaluated values of influence factors
ORI overall risk index
}{RRI relative risk impacts
)()0( kx whitening original set in grey modelling
)()1( kx accumulated sequences in grey modelling
)(~ )0( kx predicted sequences in grey modelling
)(~ )1( kx predicted accumulated sequences in grey modelling
)}(ˆ{ tx state vector describing the time-varying judgment vector
)}(ˆ{ ty output vector of the predicted overall risk indices.
1 * Corresponding author. Tel.: +0-886-73437841; fax: +0-886-73478019
E-mail address: [email protected]

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
62
)()1( kz mean sequences in grey modelling
1. Introduction
Recently risk assessment of debris-flows becomes an important research topic and
many research works were conducted wherein various methods were proposed such as
empirical methods (Jacob, et al. 2012) [1]; (Cui, et al. 2013) [2], probabilistic methods
(Arkset, et al. 2007; Hu, et al. (2008); Xu, et al (2013)) [3-5]; GIS (Wang, et al. 2011) [6];
multi-mode analysis (Tian, et al., 2011) [7]; fuzzy reasoning (Lin, et al. 2012) [8], 3-steps
approach (Settimo, et al. 2016) [9]; etc. However, a real-time quantitative method is
necessary for practical implementation of precaution and warning system for debris-flows
in order to rescue human beings and property.
Occurrence of debris flow depends highly on local topographic, meteorologic, geologic,
and hydrologic conditions (Takahashi, 1991) [10]. Many disasters caused by stony and
mud flows in Taiwan were reported and studied (Jan and Shen, 1993; Wu, et al. 2006; Lin,
2006) [11-13]. The special reasons that Taiwan is prone to debris-flow hazards have also
been reported (Jan, 2000; Huang, 2001)[14-15]. Debris flows are inherently dynamically
developing temporarily and/or spatially (Peng, 2015) [16].
In Taiwan, scientists and engineers also continuously search for appropriate methods
and systems for precaution, warning and alarming of the occurrence of debris flows.
Huang (2014) [17] has reviewed the research work on debris flow mechanisms and the
risk assessment studies in the past in Taiwan. Among these studies some of techniques
based on artificial intelligence have been proposed such as application of probability
theory (Chen and Jan, 2000) [18], intelligent control theory (Chang and Lee, 1997) [19],
expert systems (Lin, 2000) [20], grey relation analysis (Wu, 2002) [21], fuzzy reasoning
system (Chen (2006) [22] and case-based system (Tsai, 2007) [23]. However, most of
these assessment techniques consider only a few influence factors and may be not suitable
for correct prediction debris-flow hazards including multiple influence factors.
Risk assessment task is a multi-level and multi-criteria complicated process. In the
field of operational research, Saaty, T. L. (1980) [24] had proposed the so-called Analytic
Hierarchy Process (AHP) for multiple criteria decision making problems. It is also a good
approach for risk assessment of problem with multi-criteria on influence factors. The
author also had attempted applied AHP to risk assessment of debris-flow hazards
occurred in Sen-Mu and Hua-San (Huang, 2014) [25] and Tung-Men and Tung-Shing
(Huang, et al. 2015) [26], respectively, and the results are verified to be useful.
Since 1982 Deng proposed the concept of grey system for analysis (Deng,1989) [27],
researches and applications of grey system theory to forecasting and prediction of power
load (Tamura, et al. 1992) [28], fault detection (Luo, 1995) [29], earthquake (Jeng and
Chang, 1998) [30], control system design (Wong and Chen, 1998) [31], structure failure
(Liu, et al. 2001) [32] and many examples (Liu et al., 25) [33] have been conducted
successfully.
In this paper an integrated AHP and grey models, namely AHP/GM, is proposed for
building up a quantitative method for dynamic risk assessment and prediction of mud
flow hazards. Three layers and nine influence factors (criteria) are involved in the
structure of AHP. The relative judgment among each influence factor is built up based
upon 9 scaling levels to form the reciprocal judgment matrices for evaluating weighting
vectors for each layer. After the relative risk impact of each influence factor is obtained,
grey models of GM(1,1) are employed for dynamic prediction of intensity of rainfall and
accumulated rainfall, while linear model is for the duration of rainfall, after a selected

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
63
base point. And finally the time-varying overall risk index can be obtained. Two schemes
of prediction are proposed and tested, one is the Single-Step Prediction (SSP) and the
other is the Recycling Point-wise Prediction (RPP). The proposed AHP/GM methods will
be applied and verified using a practical case of disasters occurred in Tung-Shing Village
of Hua-Lian County in eastern Taiwan.
2. Framework of Dynamic Risk Assessment
The framework of dynamic risk assessment for a problem using integrated AHP
and grey modelling (GM) technique can be illustrated in Fig. 1. In the process, AHP
technique is employed to analyze the relative risk impacts (RRI) from the
comparison matrices of the multiple influence factors in hierarchical structure
(obtained from questionnaire method), and grey modelling scheme is adopted for
dynamic prediction of time-varying evaluated values corresponding to influence
factors (some time-invariant values are kept constant), and finally the time-varying
overall risk index (ORI) can be calculated and employed as dynamic risk assessed
results for precaution and warning of occurrence of disasters.
Fig. 1 Framework of dynamic risk assessment using integrated AHP and grey modelling technique.
In the following a typical model and process of dynamic risk assessment using
integrated AHP and grey modelling technique will be built and explained
considering the case of debris/mud flow hazard.
3. Relative Risk Indices Obtained Using AHP Model
The procedures to construct AHP model for risk assessment of mud flow hazards
and to obtain relative risk indices had been studied by Huang (2014) [25], Huang, et
al. (2015)[26]. The basic procedures are as follows:
(1) Establish a hierarchical model
(2) Setup comparison matrices
(3) Calculate the relative weights and the maximal eigen-values
(4) Check the consistency
(5) Evaluate the final assessed risk index
The top of a hierarchical model is the goal to be achieved by AHP, shown in Fig.
2. The second layer (criteria layer) refers to the proposed major categories of
influence factors. Factors in the third layer (sub-criteria-layer) support the factors in
the second layer.
Risk assessment
problems
(multiple
influence
factors)
AHP
Relative
Risk
Impacts
][]ˆ[ RRIC
Time-Invariant evaluated value of
influence factors {E}
Time-varying evaluated value of influence
factors
{E(t)}
Grey system
theory: GM(1,1)
)}({ 0 tx
Predicted overall risk
index
)}(ˆ]{ˆ[
)(ˆ)(
txC
tytORI

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
64
Fig. 2 Hierarchical model of the risk assessment of debris/mud flows hazards using AHP
Comparison matrices are obtained through filling in a questionnaire form by some
experts in this field. Here we adopt 1-9 scaling method as suggested by Saaty (1980)
[24] . The following judgment matrices are built up:
44
1
33 12/12/14/1
213/23/1
22/312/1
4321
][
142
4/112/1
2/121
][
x
CB
3312/33
3/212
3/12/11
]3[
2213/1
31]2[
x
CC
(1)
The calculated results of the relative risk impact (RRI) of each influence factors
on the overall risk are (Fig. 3):
2857.0
1905.0
0952.0
0357.0
1071.0
0308.0
0503.0
0682.0
1364.0
5714.0
1429.0
2857.0
5.000
3333.000
1667.000
025.00
075.00
001078.0
001761.0
002387.0
004774.0
}{RRI (2)
C21. Effective Area of Watershed (EA)
C22. Out-Flow of Sediment (OS)
C14.
Surface Plants (SP)
AHP Model for Risk Assessment of Debris/Mud Flow Hazards
B1.
Topological & Geological Conditions (TG)
B2.
Watershed Conditions (WS)
B3.
Rainfall Conditions (RF)
C12. Type of Deposit (TD)
C13.
Grain Size Distribution (SD)
C11. Averaged Slope Angle (SA)
C31. Intensity of Rainfall (IR)
C32. Duration of Rainfall (DR)
C33.
Accumulated Rainfall (AR)
Goal Layer
Risk Factors Layer
Risk Factors Sub-Layer

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
65
Fig. 3 Diagram for relative risk impact (RRI) for influence factors of mud-flow hazards using AHP
1. Dynamic Risk Assessment and Prediction Based on GM(1, 1) Model
1.1. Build up the evaluation criteria for each influence factor
The evaluation value and criteria for mud-flow occurred in Taiwan is proposed as
reported in Huang (2014) [25], Huang, et al. (2015) [26]. The criteria depend on
special real situations for different countries.
1.2. Identify static and dynamic risk influence factors
In the AHP model we can find that 6 influence factors 221211 ,, CCC are nearly
static and not vary with time significantly and we can consider these are static
variables; while 3 influence factors 3231, CC and 33C are inherently time-dependent.
The mapping relationship between the quantities of dynamic influence factors and
judgment vector components can be expressed as follows:
(1) Intensity of rainfall (I) and E7 (C31):
hrmmTfor
hrmmThrmmforI
hrmmIfor
CE
/20,9
/20/5),5(520
191
/5,1
)( 317
(3)
(2) Duration (T) and E8 (C32):
hrTfor
hrThrforT
hrTfor
CE
20,9
201),1(120
191
1,1
)( 328 (4)
(3) Accumulated rainfall (A) and E9(C33):
mmAfor
mmAmmforA
mmAfor
CE
400,9
400100),100(100400
191
100,1
)( 339
(5)

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
66
1.3. Build up the prediction models
(1) Linear Model:
Assuming we have original data set )(,),2(),1( )0()0()0(atxxx which is linearly
varying such as the duration of rainfall (C32) in AHP of mud flow hazards, then the
predicted sequences can be directly obtained as
Paaa Nptpmtxptx ,,2,1),()()( )0()0( (6)
where at is the time for activating prediction, pN is the total number of points to
be predicted; m is the linear slope of the line between 1t to att .
(2) GM(1,1)-based Exponential Growth Model:
When the original data set )(,),2(),1( )0()0()0(atxxx vary in a time-growing type,
such as the intensity of rainfall (C31) and the accumulated rainfall (C33) in AHP of
mud flow hazards, the GM(1,1) model can be employed for grey modeling and grey
prediction. The basic procedures can be summarized as follows:
(1) Obtain }{ )1(x from }{ )0(x using accumulated generating operation (AGO):
)()( )0(
1
)1( mxkxk
m
(7)
(2) Obtain the mean sequences }{ )1(z :
atkkxkxkz ,,3,2,2/))1()(()( )1()1()1(
(8)
(3) Calculate the matrix ][B and vector }{Y :
)(
)3(
)2(
}{,
1)(
1)3(
1)2(
][
)0(
)0(
)0(
)1(
)1(
)1(
aa tx
x
x
Y
tz
z
z
B
(9)
(4) Calculate the parameter vector:
}{][])[]([ 1 YBBBb
a TT
(10)
(5) Build up the GM(1,1) model for }{ )1(x :
a
be
a
bxkx ka )1()0()1( ))1(()(~ (11)
(6) Obtain the whitening original set:
)1(~)(~)(~ )1()1()0( kxkxkx (12)

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
67
(7) Evaluate the predicted sequence )(~ )0( ptx a :
(7a) Single-Step Prediction (SSP) Scheme: when this scheme is employed, the
original data }{ )0(x is employed for building the GM(1,1) model and the predicted
sequences are obtained at a time:
Ppta
a Npa
be
a
bxptx a ,,2,1,,))1(()(~ )1()0()1(
(13)
Paaa Npptxptxptx ,,2,1,),1(~)(~)(~ )1()1()0( (14)
(7b) Recycling Point-wise Prediction (RPP) Scheme: when this scheme is
employed, initially we use the first aN~1 points to build GM(1,1) model and predict
only single point for )1(~ )1( atx and )1(~ )0( atx ; and in the 2nd cycle we use 1~2 aN
original data set to to build GM(1,1) model and predict only single point for
)2(~ )1( atx and )2(~ )0( atx , and continuously recycling the process to obtained all the
predicted sequence pa Npptx ,,2,1),(~ )0( .
amta
a tma
be
a
bmxmtx a ,,2,1,,))(()(~ )1()0()1(
(15)
aaaa tmmtxmtxmtx ,,2,1,),1(~)(~)(~ )1()1()0( (16)
Since in each step one data point (old information) is updated and replaced by the
newest data (new information) and this scheme is expected to be more precise than
the SSP.
1.4. Evaluate the final dynamic overall risk index
From the previous study on the risk assessment of mud flow hazards using AHP
model [25, 26], the overall risk index can be evaluated as
iii
T ERRIERRIORI
9
1}{}{ (1
7)
where }{E is a 19 vector denoting the evaluation value of each influence factor
(sub-criteria). We can extend this to dynamic assessment situation and write the
equation in alternate form:
)}(ˆ{]ˆ[)()}({)}(ˆ{9
1
txCtERRItORIty iii
(18)
where )}(ˆ{ ty denotes the output vector of the predicted Overall Risk Index (ORI),
]ˆ[C is the state-to-output transformation matrix containing the Relative Risk Impact
(RRI), and )}(ˆ{ tx denotes the state vector describing the time variation of judgment
vector

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
68
2. Application of AHP/GM Quantitative Method to Dynamic Risk Assessment of Mud-Flow Hazards
2.1. Description of mud-flow disasters occurred in Tung-Shing village in eastern Taiwan
The case of mud-flow disaster we employed for checking the validity of risk
assessment model is a mudslide occurred at July 10-11, 1994, in the Tung-Shing
Village, Fung-Bin township, Hua-Lien County, Taiwan during the attack of
Typhoon with strong storms (Fig. 4). This mud-flow caused more than 50 deaths.
Chang (1995) [34], Chen and Shieh (1996) [35], had reported the mud flow caused
disasters.
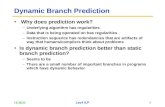
Fig. 4 Location of two cases of mud-flow hazards occurred in Eastern Taiwan
2.2. Recorded data and judgment vector {E}
(1) Static data of mud flow occurred in Tung-Shing Village
The judgment vector components for those static data ),,,( 621 EEE corresponding
to the influence factors ),,,( 221211 CCC are list in Table 1.
Table 1. Recorded data of investigation of mud-flow hazards occurred at Tung-Shing village
A. Risk assessment of mud-flow hazards Recorded data Rank
(1-9)
B1. Topological & geological conditions
C11. Average Slope Angle(θ ) (Degree) Source area (16~17o)
Truck (12~16o) Deposit (6o)
5
C12. Type of Deposit Crashed rocks 7 C13. Grain Size Distribution Fine grained content:
(1) upstream: 30%
(2) mid-region: 45% (3) downstream: 65%
7
C14. Surface Plants Shallow rooted trees 7
B2. Watershed conditions C21. Effective Area of Watershed (m2) 660000 m2 9
C22. Out-Flow of Sediment (m3) 122000 m3 9
(2) Dynamic data of mud flow occurred in Tung-Shing village
Figure 5(a) shows the real record for the intensity of rainfall at Tung-Shing
Rainfall Measurement Station from 1:00 a.m., July 10, 1994 to 3:00 a.m., July 11,
1994, i.e., totally 27 hours (Chen, et al. 1996) [35]. And the duration and
accumulated rainfall are expressed in Fig. 5(c) and Fig. 5(e), respectively. Based on
21.5
22
22.5
23
23.5
24
24.5
25
25.5
119.5 120 120.5 121 121.5 122 122.5
Taiwan Map
Tung-Shing,Hua-
lien, July
10-11, 1994

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
69
the AHP model the judgment vector components )(),( 87 tEtE and )(9 tE corresponding
to the influence factors ),,( 333231 CCC are shown in Fig. 5(b), 5(d) and 5(f),
respectively. It can be observed that intensity of rainfall varies significantly.
Fig. 5 Original data of intensity of rainfall, duration and accumulated rainfall at Tung-Shing village
and the associated judgment vector components )(),( 328317 CECE , and )( 339 CE before disaster
occurrence
2.3. Dynamic risk assessment of mud-flow hazard occurred in Tung-Shing village
We choose the data points from 1 to 15 for analysis )15( aN and then predict the
data from 16 to 27 )12( PN . The real temporal point of mud flow disaster is at the
point between 23 and 24 (23:30 p.m., July 10, 1994). We expect to have earlier
precaution of the hazard before the occurrence and thus to get more time for
warning, alarming and preparation of rescuing people. For practical implementation
of alarming system, we assume to set the warning time at 6ORI and the alarming
time at 7ORI . (It can be adjusted depending on practical requirement).
(1) Single-Step Prediction (SSP) Scheme:
Using this scheme only a single cycle grey modeling and prediction is conducted.
Using the first 15 data of intensity of rainfall and accumulated rainfall to build
GM(1,1) models to obtain the whitening data pa NNkkx ,2,1),(ˆ )1( and the
predicted original data set pa NNkkx ,2,1),(ˆ )0( using Eq. (7~13); while the
duration of rainfall is predicted using linear law, Eq. (6). The dotted lines in Figure
6(a), 6(c), and 6(e) are predicted using SSP schemes; while the corresponding
judgment vector components )(ˆ),(ˆ87 tEtE , and )(ˆ
9 tE are shown in Fig. 6(b), 6(d) and
6(f), respectively. It can be observed that the predicted intensity of rainfall and
accumulated rainfall, as expected, grow exponentially with time. Figure 7 shows the
final ORI prediction using SSP scheme in which the predicted curve is much
deviated from the real one. However, using this SSP scheme we can have early
precaution of the mud flow disaster (warning before 7 hours and alarming before 5
hours).

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
70
Fig. 6 SSP predicted results of intensity of rainfall, duration and accumulated rainfall at Tung-
Shing village and the associated judgment vector components )(),( 328317 CECE , and )( 339 CE before
disaster occurrence
Fig. 7 SSP predicted results of overall risk index (ORI) at Tung-Shing village
(2) Recycling Point-wise Prediction (RPP) Scheme (Rolling Prediction Scheme):
It can be observed that due to the final points of data set in each cycle for GM(1,1)
analysis are updated by the new coming real data, the predicted results (dashed lines)
for intensity of rainfall (Fig. 8(a)), accumulated rainfall (Fig.8(e)) and their
corresponding judgment vector components (Fig. 8(b) and Fig. 8(f)) are closer to the
real results as compared with those in Fig. 10 using SSP. The resul ts are reasonable
because only single data point is predicted in each cycle and always the newest data
are employed for building the grey modelling. Furthermore, Figure 9 shows the final
ORI prediction using RPP scheme in which the predicted curve is also closer to the
real one than that in Fig. 7. However, we should notice that even it is more precise
in the predicted time of occurrence but the time of earlier precaution would be
sacrificed (warning before 5 hours and alarming before 1 hours).

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
71
Fig. 8 RPP predicted results of intensity of rainfall, duration and accumulated rainfall at Tung-
Shing village and the associated judgment vector components )(),( 328317 CECE , and )( 339 CE before
disaster occurrence
Fig. 9 RPP predicted results of overall risk index (ORI) at Tung-Shing village
3. Conclusion
Correct quantitative techniques for risk assessment and prediction are required for
precaution, warning and mitigation of various kinds of disasters. An effective and
efficient AHP/GM-based quantitative approach for dynamic risk assessment and
prediction of mud-flow hazards is presented and successfully verified using a
practical recorded data of mud-flow disaster occurred in Tung-Shing Village,
Taiwan. In this approach, AHP is employed for building the hierarchical structure of
influence factors and evaluate the relative risk impacts (RRI) of influence factors;
whereas the GM(1,1) models are employed for grey modelling the dynamic variation
of intensity of rainfall as well as accumulated rainfall for dynamic risk prediction.
Single-Step Prediction (SSP) scheme and Recycling Point-wise Prediction (RPP)
scheme are proposed and compared with each other. Important findings are:
(1) Integrated AHP and GM theory to build up an AHP/GM-based quantitative
dynamic risk assessment and prediction method is for mud flow hazards including

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
72
multiple influence factors is feasible. With this method the major influence factors
can be constructed and ranked, the relative risk impact of each influence factors can
be evaluated, and the overall risk index of mud-flow hazard can be obtained
including static influence factors and dynamic ones which are predicted using
GM(1,1) models.
(2) SSP scheme provides a single cycle and convenient approach for dynamic risk
prediction. In general long-term predicted results might deviate from the real values
too much and thus over-estimate the risk potential. However, for practical
implementation, SSP is expected to provide an early precaution of highly disaster
hazards.
(3) RPP scheme provides more precise dynamic predicted results for the overall
risk index than SSP scheme due to newest data are added into the basic set in the
GM(1, 1) model for predicting only one new unknown data. For compromise of
precaution and the precision requirement the predicted data points in RPP can be
added to 2, 3 or more.
The developed quantitative technique of dynamic risk assessment can be extended
to another applications with multiple influence factors are involved, such as
financial, social, engineering and so forth, wherein new AHP frameworks and
associated new GM(1,1) models can be built according to the treated problems.
References
[1] Jacob M, Holm K, Weatherly H, Liu SL, Ripley N. Debris-flood risk assessment for Mosquito Creek,
British Columbia, Canada, Natural Hazards, 2012, 65(3):1653-1681.
[2] Cui P, Xiang LZ, Zou Q. Risk assessment of highways affected by debris-flow in Wunchuan earthquake
area, J. Mountain Science, 2013, 10(2): 173-189.
[3] Arksey R, Vandine D. Example of debris-flow risk analysis from Vancover Island, British Colombia,
Canada, Landslides, 2007, 5(1): 121-126.
[4] Hu KH, Li Y, Wei FQ. Annual risk assessment on high-frequency debris-flow fans, Natural Hazards,
2008, 49(3): 469-477.
[5] Xu FG, Yang XG, Zhou JW. An empirical approach for evaluation of the potential of debris flow
occurrence in mountain areas, Environmental Earth Science, 2013,71(7): 2479-2988.
[6] Wang JJ, Ling HI. Developing a risk assessment model for typhoon-triggered debris flows, J. Mountain
science, 2011, 8(1): 10-23.
[7] Tian SJ, Kong JM, Li XZ. Forecast method of multimode system for debris flow risk assessment in
QuingPingtown, Sichuan, China, J. Mountain Science, 2011, 8(4): 592-602.
[8] Lin JW, Chen CW, Peng CY. Potenial hazard analysis and risk assessment of debris flow by fuzzy
modelling, Natural Hazards, 2012, 64(1): 273-282.
[9] Settimo F, Giovanna DC, Leonardo C. Quantitative risk analysis for hyperconcentration flows in Nocera
Inferiore (Southern Italy), Natural Hazards, 2016, 81(1): 89-115.
[10] Takahashi, T. Debris flow. Balkema, Rotterdam, 1991.
[11] Jan, CD, Shen HW. A review of debris flow analysis, Proc. XXV Congress, IAHR, 1993, 3: 25-32.
[12] Wu JM, Yu FC, Chao CM. The earth disasters of slope lands in Taiwan, J. of Envir. and Manag., 2006,
VII(1): 86-98.
[13] Lin ML. Debris flow hazards and mitigations in Taiwan. Keynote Speech, Proc. the 2nd Taiwan-Japan
Joint Workshop on Geotechnical Hazards from Large Earthquakes and Heavy Rainfall, Japan, 2006.
[14] Jan CD. Introduction to debris flows, Science and Technology Books Company, Taiwan, R. O. C. (in
Chinese), 2000.
[15] Huang LJ. Introduction to theory and practice of debris-flow hazards mitigation, Chuan-Hwa Publishing
Ltd. Taiwan, R.O.C. (in Chinese), 2001.

International Journal of Safety Science
Vol. 01, No. 03, (2017), pp. 61-73
DOI:10.24900/ijss/01036173.2017.1201
73
[16] Peng CUI. Amplification mechanism and dynamic based risk assessment for debris flow. Key-note
Speech, 6th International Conference on Debris-Flow Hazards Mitigation: Mechanics, Prediction and
Assessment (DFHM6), Tsukuba, Japan, June 22-25, 2015.
[17] Huang LJ. Review of the researches on debris flows in Taiwan during past thirty years, Int. J. of Emerg.
Tech. and Adv. Engng., 2014, 4(12): 122-131.
[18] Chen JC, Jan CD. Debris-flow occurrence probability on hillslopes. In: Wieczorek GG, Naeser ND,
editors, Proc. 2nd Int. Conf. on Debris-Flow Hazards Mitigation: Mechanics, Prediction, and
Assessment. Taipei, Taiwan, Aug. 16-18, 2000, A. A. Balkema, Rotterdam, Brookfield, 2000, 411-416.
[19] Chang FC, Lee SP. A study of the intelligent control theory for the debris flow warning system. Proc.
1st Conference of Debris Flows. 1997, 109-123.
[20] Lin LK. Development of expert systems for mitigation of debris-flow hazards. In: Wieczorek GG,
Naeser ND, editors, Proc. 2nd Int. Conf. on Debris-Flow Hazards Mitigation: Mechanics, Prediction,
and Assessment. Taipei, Taiwan, Aug. 16-18, 2000, A. A. Balkema, Rotterdam, Brookfield. 2000, 425-
429.
[21] Wu JT. Evaluation of debris flow hazards. Master Thesis. Institute of Hydraulic and Ocean Engineering,
National Cheng Kung University. (in Chinese), 2002.
[22] Chen KH. The study of fuzzy reasoning applied to the prediction system of debris flows. Master Thesis.
Institute of Civil Engineering, Fung-Chia University. (in Chinese), 2006.
[23] Tsai SM. The study of case-based reasoning applied to the prediction system of debris flows. Master
Thesis. Institute of Civil Engineering, Fung-Chia University. (in Chinese), 2007.
[24] Saaty TL. The analytic hierarchy process, McGraw-Hill, 1980.
[25] Huang LJ. Application of AHP to debris-flow hazards risk assessment - case study of disasters occurred
in Sen-Mu and Hua-San villages, Taiwan. Int. J. Emer. Tech. Advan. Engng. (IJETAE), 2014, 4(12):
106-113.
[26] Huang LJ, Lin, YR, Chen TW. Debris-flow hazards risk assessment using analytical hierarchy process
(AHP) - case study of disasters occurred in Taiwan. Paper No. P-55, 6th International Conference on
Debris-Flow Hazards Mitigation: Mechanics, Prediction and Assessment (DFHM6), Tsukuba, Japan,
June 22-25, 2015.
[27] Deng J. Introduction to grey system theory, J. Grey System, 1989, 1(1): 1-24.
[28] Tamura Y, Zhang DP, Umeda N, Sakeshita K. Power load forecasting using grey dynamic model, The J.
Grey Sys., 192, 4(4): 49-58.
[29] Luo M. Fault detection, diagnosis and prognosis using grey system theory, Ph. D. Thesis, Monash
University, Australia, 1995.
[30] Cheng KS, Chang WZ. Application of grey system theory to earthquake forecasting, The 3rd
Conference on Grey System and Application, 1998.
[31] Wong CC, Chen CC. A simulated annealing approach to switching grey prediction fuzzy control system
design, Int. J. Sys. Sci., 1998, 29(6): 341-352.
[32] Liu KL, Lin YX, Dal, G. Grey predicting the structural failure load, The J. Grey Sys., 2001, 13(2).
[33] Liu SF, Dang YG, Fang ZG. Grey system theory and its applications, Scientific Publisher, China (In
Chinese), 2004.
[34] Chang KT. Case study of debris flows: Tzunaku Rill debris flow and Tung-Shing mud flow, Master
Thesis of Graduate Institute of Applied Geology, National Central University, Taiwan, 1995.
[35] Chen LJ, Shieh CL. Field investigation on mudslide hazards occurred in Tung-Shing, J. Env. Engng,
1995, 15: 47-63.
Top Related