





Languages
Pages
Legal

7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
1/22
American Institute of Aeronautics and Astronautics Paper ATIO-2007-7737
ATIO-2007-7737
7th AIAA Aviation Technology, Integration and Operations onference, !"#20 $eptem%er 2007, &elfast, 'orthern Ireland
onflict (etection and )esolution for !,2,* * *
,' Aircraft
+illes (oe .esar
/uno1
This paper presents a mathematical frameor for the formal specification of aircraft
conflict detection and resolution algorithms and the verification of their properties* The
frameor is illustrated ith original algorithms that detect conflicts ith multipleaircraft
and effectively solve all them via vertical speed-only maneuvers*
I* Introduction
ormal methods in computer science refers to the use of logic and mathematics to verify that a system
design and its implementation satisfy functional reuirements and safetyproperties*!
(espite the fact thatseveral onflict (etection and )esolution 4(5)6 systemshave %een proposed in the past fe years,2 very
fe of these systems have %een descri%ed and analy1ed using formal methods* Therefore, it is not alays
clear hat properties these algorithms satisfy* or instance, the notion of cooperative resolution isoften used in the (5) literature epressing different and, sometimes, contradictory concepts, e*g*, it
epresses echange of intent information,3#8 degree of coordination,2, 7 sharing of effort to achieve
separation," and temporary delegation of responsi%ility for separation*9 This confusion could %e avoided %yproviding rigorous definitions of the concepts and properties that are fundamental to all (5) systems*
This paper presents a mathematical frameor for the formal specification and analysis of conflict de-
tection and resolution algorithms and their properties* This frameor applies to state-%ased, pair,ise,
geometric, and distri%uted conflict detection and resolution algorithms* $tate-%ased 4or tactical6 refers
to the use of aircraft state information, e*g*, position and velocity vectors, as opposed to strategic
approaches that use intent information, e*g*, flight plan* Pairise refers the use of a conflict detection
and resolution logic for t,odistinguished aircraft: the onship and the traffic aircraft* +eometric refers tothe use of lin- ear pro;ections to predict aircraft tra;ectories as opposed to pro%a%ilistic or performance-
%ased tra;ectories* inally, distri%uted refers to systems that are deployed on several aircraftdetecting andsolving conflicts for the onship as opposed to centrali1ed systems that detect and simultaneously solveconflicts for a large set of aircraft* The distri%uted approach that e consider in this frameor reuires
minimal communication %et,een the aircraft* In particular, the only information that is periodically
echanged %eteen the aircraft is the state information, e*g*, position and velocity vectors of the aircraft*
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
2/22
American Institute of Aeronautics and Astronautics Paper ATIO-2007-7737
! of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
3/22
aircraft tra;ectories can %e descri%ed %y a position, a velocity vector, and a time interval* e also assume
that in order to solve a conflict an aircraftcan instantaneously change course and speed* These assumptions
are typicalof tactical (5) systems ith short looahead times 4usually, @ minutes6*
The state information of an aircraft is represented %y an identifier, a position, and a velocity vector*
Identifiers are assumed to%e uniue and invariant, i*e*, 4!6 there are no t,odifferentaircraftin the airspace
ith the same identifier, and 426 the identifier of an aircraft does not change over time* &y a%use of notation,
e ill usually refer to an aircraft%y its state* Benceforth, e use letters A, &, * * * to denote aircraft states,%oldface letters to denote vector varia%les, e*g*, s denotes position and v denotes velocity, and typewriter
type for algorithms* hen a vector varia%le refers to a particular aircraft, the varia%le is su%-indicated%ythe aircraft state* or instance the current position and velocity vectors of an aircraft A are denoted sAand vA , respectively* As usual, su%-indices , y, and 1 denote ais values, e*g*, vA , vAy are the hori1ontal
components of the velocity vector vA *
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
4/22
p2D y2
|1|
k4, y, 16k Gma74
, 6* 4>6( B
2 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
5/22
Proposition ! ormulas 426, 436, and 4>6 are ell-defined vector norms, i*e*, they satisfy positivity, nullity,scala%ility, and triangular ineuality*
The use of a norm allos for definitions of aircraftdistance and loss of separation that are independent
of the shape of the protected 1one*
(efinition 2 4(istance6 The distance %eteen aircraft A and & is defined as
H4A, &6 G ksA s&k*4@6
(efinition 3 4oss of $eparation6 A loss of separation or violation occurs hen the protected 1ones ofto aircraftoverlap, e*g*,
PA P& G *
486 The notions of loss of separation and aircraftdistance are related %y the folloingproposition*
Proposition 2 Aircraft A and & are in loss of separation if and onlyif
H4A, &6 E !*
The linear tra;ectory of an aircraft ispredicted from the current state of the aircraft, here the velocity
of the aircraft is assumed to %e constant*
(efinition > 4Predicted $tate6 The predicted state of an aircraft A at future time t relative to acurrent time 0, denoted A4t6, satisfies:
sA4t6 G sA D t vA ,
vA4t6 G vA *
A conflict is a predicted loss of separation %eteen t,oaircraft ithin a looahead time T*
(efinition @ 4onflict6 Aircraft A and & are said to %e in conflict if there is a time t in the future
%ut%efore the looahead time, i*e*, 0 t T , such that the distance %eteen the aircraft at time t is
strictly less than !:
H4A4t6, &4t66 E !* 476
onflicts are usually checed %y comparing the predicted closest separation of t,o aircraft against
theminimum safe distance defined %y the protected 1one*
(efinition 8 4Time of losest $eparation6 The time of closest separation %eteen aircraft A and &ithin a looahead time T, denoted JT 4A, &6, is the smallest time J, 0 J T, such that for any
time t,0 t T:
H4A4J6, &4J 66 H4A4t6, &4t66*4"6
'ote that the time of closestseparation alays eists %ecause H is a continuous function and the timerange 0 t T defines a close interval*
(efinition 7 4(istance of losest $eparation6 The distance of closest separation %eteen to aircraft
A and &, ithin a looahead time T, is the distance at the time of closest separation, i*e*,
KT 4A, &6 G H4A4JT 4A, &66, &4JT 4A, &666* 496
The folloingpropositionprovides an alternative definition of conflict%ased on distance of closestsepa-
ration*
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
6/22
Proposition 3 Aircraft A and & are in conflict if and only if KT 4A, &6 E !*
3 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
7/22
In our frameor, a resolution maneuver is modeled as an instantaneous change of the velocity vector of
the currentaircraftstate*
(efinition " 4)esolution /aneuver6 A resolution maneuver RA is a ne state for an aircraft A that4only6 modifies the value of the current velocity vector* The ne velocity vector for aircraft A undermaneuver RA is denoted vRA *
)esolution maneuvers can %e classified according to the parameters of the velocity vector that they
modify* Assuming a 3-dimensional geometry:
RA is a trac-only maneuver if vRA7
D vRAy G vA2 D vAy
2 and vRA1 G vA1 *
RA is a ground speed-only maneuver if vRA1 G vA1 and there is a positive such that 4vRA7, vRAy 6
G4vA7, vAy 6*
RA is a vertical speed-only maneuver if vRA7 G vA and vRAy G vAy *
)esolution maneuvers can also %e classified according to the separation criteria that they satisfy* etRAand R& %e resolution maneuvers for aircraftA and &,
RA is an independent resolution for aircraft A 4ith respect to aircraft &6 if KT 4RA, &6 !*If
KT 4RA, &6 G !, RA is also tangential*
RA and R& are coordinated if KT 4RA,R&6 !* If KT 4RA,R&6 G !, they are also minimal*
RA and R& are repulsive if KT 4RA,R&6 L KT 4A, &6*
III* onflict (etection
This section presents our mathematical frameor for the specification of conflict detection algorithms
and their safety properties* It illustrates the use of the frameor ith a three dimensional conflictdetection
algorithm for multiple aircraft*
III*A* Pairise onflict (etection
A 4pairise6 conflict detection algorithm taes as parameters the currentstate of t,oaircraft, and returns
a &oolean value that indicates a predicted loss of separation %eteen them*
(efinition 9 4onflict (etection orrectness and ompleteness6 +iven a looahead time T , acon- flict detection algorithm, namely cd, is correct if only conflicts are detected, i*e*, for all aircraftstates A and &, if cd4A, &6 returns true then A and & are in conflict* The algorithm is complete if allconflicts are detected, i*e*, if A and & are in conflict then cd4A, &6 returns true*
'ote that according to the previous definition, an algorithm that alays returns true is complete,%utnot correct, and an algorithm that alays returns false if correct, %ut not complete*
Proposition > If cd is correct and complete then cd is symmetric, i*e*, for all aircraft states A and
&,cd4A, &6 if and only if cd4&,A6*
III*&* onflict (etection for /ultiple Aircraft
A detection algorithm for multiple aircraft cMd taes as parameters the currentstate of the onship A anda set of aircraft states N here A 6 N, and returns a &oolean value that indicates a predicted loss ofseparation %et,een A and any aircraft in N*
(efinition !0 4onflict (etection orrectness and ompleteness for /ultiple Aircraft6 +iven a
looahead time T, a conflict detection algorithm for multiple aircraft, namely cMd, is correct if for allaircraft state A and set of aircraft states N, here A 6 N, if cMd4A, N6 returns true then A is in
conflict ith an aircraft & N* The algorithm is complete if every time that A 6 N and & N are inconflict then cMd4A, N6 returns true*
22
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
8/22
> of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
9/22
(efinition !! A pairise conflict detection algorithm cd can %e transformed into a conflict detectionalgo- rithm for multiple aircraft cMd as follos:
cMd(AN!" #$$l %if N G t&e'
falseelse let & N i'
cd(A&! $r
e'dif
cMd(AN {&}!
The algorithm cMdis recursive* Boever, it is ell-defined since the cardinalityof the setof aircraftstrictly decreases at each iteration*
Proposition @ If cdis a pairise correct and complete conflict detection algorithm then cMdis a correctand complete conflict detection algorithm for multiple aircraft*
III** A 3-(imensional (etection Algorithm for /ultiple Aircraft
=&3( is a pairise state-%ased (5) system co-developed %y the authors!! and formally verified in the
Program ?erification $ystem 4P?$6*!@ In this section, e illustrate our conflict detection frameor ith a
simplified version of the conflictdetection algorithm used %y =&3(, hich e call cd)d*The protected 1one in =&3( is cylinder of diameter ( and height B * Therefore, the norm is defined as
in ormula 4>6* The conflict detection logic considers the folloing cases:
The relative hori1ontal velocity of the aircraft is 1ero, i*e*, v72 D vy
2 G 0, and the aircraft
have already losthori1ontal separation, i*e*, s72 D sy
2 E (2 * In this case, the aircraft are in conflict
if they have already lost vertical separation, i*e*, |s1 | E B , or if they ill lose vertical separationithin the looahead time T , i*e*, v1 s1 E 0 and B E si*'4v1 64T v1 D s1 6*
The relative vertical speed of the aircraft is 1ero, i*e*, v1 G 0, %ut the aircraft are hori1ontallyseparated* irst, e compute the time interval of hori1ontal conflict Ot(in , t(out P from the uadratic
euation on t:
4s7 D tv762
D 4sy D tvy 62
G (2
*
In this case, there is a conflictif the aircrafthave already lostvertical separation, i*e*, |s1 | E B , andif the time interval of hori1ontal conflict is ithin the looahead time T, i*e*, t(out L 0 and t(in E T
*
In the general case, e compute the time interval of hori1ontal conflict Ot(in , t(out P as in theprevious case, and the time interval of vertical conflictOtBin, tBout P from the euation on t:
|s1 D tv1 | GB*
rom these intervals, e compute the time interval of conflict Otin, tout, here
tin G ma4t(in, tBin 6,
tout G min4t(out
, tBout
6*
In this case, there is a conflict if this interval is ithin the looahead time T, i*e*, tin E tout and tout L
0 and tin E T*
The pairise algorithm cd)d is defined as follos*
cd)d(A&!" #$$l %let s % sA s& i'let v % vA v& i'
if v72 D vy
2 G 0 a'd s72 D sy
2 E (2 t&e'|s1 | E B $r4v1 s1 E 0 a'd B E si*'4v1 6 4T v1 D s1 66
elselet d % 2 s7 v7 sy vy D (
2 4v72 D vy
26 4s72 vy
2 D sy2 v7
26 i'
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
10/22
@ of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
11/22
if d L 0 t&e'let a % v7
2 D vy2 i'
let% % s7 v7 D sy vy i'+let t(in % 4%let t(out % 4% Dif v1 G 0 t&e'
d6Qa i'+d6Qa i'
|s1 | E B a'd t(out L 0 a'd t(in E T
elselet tBin % 4si*'4v16 B s1 6Qv1i' let tBout % 4si*'4v1 6 B s1 6Qv1i' let tin % ma4t(in, tBin 6 i'let tout % min4t(out, tBout 6 i'
tin E tout a'd tout L 0 a'd tin E Te'dif
else falsee'dif
e'dif
Proposition 8 The conflict detection algorithm cd)d is correct andcomplete*
The folloing theorem is a corollary of Propositions @and 8*
Theorem 7 The conflict detection algorithm for multiple aircraft cdM)d, from (efinition !!, is correctand complete*
I?* onflict )esolution
This section presents our mathematical frameor for the specification of conflict resolution algorithms
and their safety properties* &ased on this frameor, e propose an original vertical-only resolution algo-
rithm for multiple aircraft*
I?*A* Pairise onflict )esolution
A 4pairise6 conflict resolution algorithm taes as parameters the currentstate of t,oaircraft, the onship
and the traffic aircraft, and returns a set of possi%le resolution maneuvers for the onship* Benceforth, e
assume that conflictresolution algorithms are only applied to conflicting aircraft, i*e*, aircraftA and & that
are in conflictithin a looahead time T: KT 4A, &6 E !,%ut not in violation: H4A, &6 !*ompleteness of a conflictresolution algorithm refers to the eistence of at least one resolution maneuver
for every pair of conflicting aircraft*
(efinition !2 4onflict )esolution ompleteness6 A conflict resolution algorithm, namely cr, is com-plete if for all conflicting aircraft A and &, cr4A, &6 is non-empty*
e define several notions of conflict resolution correctness depending on the num%er of aircraft thatmaneuver to resolve a predicted conflict* or one aircraft, the correctness property is called independence,
for t,oor more aircraftis called coordination*
I?*&* onflict )esolution for One Aircraft
A %asic assumption in a distri%uted conflict resolution approach is that only one aircraft, e*g*, the onship,maneuvers* In this case, the traffic aircraft is assumed to eep its currenttra;ectory*
(efinition !3 4Independent onflict )esolution6 A conflict resolution algorithm, namely cr, is inde-pendent if and only if all resolutions computed %y the algorithm are independent for the onship, i*e*,
for all conflicting aircraft A and &:
RA cr4A, &6 implies KT 4RA, &6 !*
8 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
12/22
'ote that a conflict resolution algorithm that is independent guarantees a minimum safe separation
distance %eteen the onship and traffic aircraft hen only the onship maneuvers*
(efinition !> 4Tangential )esolution6 A conflict resolution algorithm cris tangential if all resolutionscomputed %y the algorithm are tangential, i*e*, for all conflicting aircraft A and &:
RA cr4A, &6 implies KT 4RA, &6 G!*
The folloingproperty is a corollary of (efinitions !3 and !>*
Proposition " All tangential algorithms are independent*
I?** onflict )esolution for To Aircraft
In contrast to independent conflict resolution algorithms, here the resolution effort relies on the onship,
a coordinated algorithm assumes that %oth the onship and traffic aircraftpotentially maneuver to avoid
an impending conflict*
(efinition !@ 4oordinated onflict )esolution6 A conflict resolution algorithm cr is coordinated ifall resolutions computed %y the algorithm are pairise coordinated, i*e*, for all conflicting aircraft A and
&:
RA cr4A, &6 and R& cr4&, A6 implies KT 4RA,R&6!*
(efinition !8 4/inimal )esolution6 A conflict resolution algorithm cris minimal if all resolutions com-puted %y the algorithm are pairise minimal, i*e*, for all conflicting aircraft A and &:
RA cr4A, &6 and R& cr4&, A6 implies KT 4RA,R&6 G!*
The folloingproperty is a corollary of (efinitions !@ and !8*
Proposition 9 All minimal algorithms arecoordinated*
The concepts of independent and coordinated conflict resolution are orthogonal* $ection ? presentseamples of resolution algorithms that are independent ithout %eing coordinated, coordinated ithout
%eing independent, and coordinated and independent simultaneously* urthermore, any independent
conflict resolution algorithm can %e transformed into a coordinated algorithm %y using a priority relation
%et,een aircraft* If the priority relation is non to all aircraft, coordination can %e achieved ithout a
central authority* The priority relation could %e as simple as an order over aircraft identifiers* It does not
need to %e constant under time* Boever, at a given time all aircraft have to use the same priority
relationship*ormally, apriority relation is a strict order over aircraftstates* e rite A , & to denote that aircraft
A has priority over aircraft & at currenttime*
(efinition !7 et cr%e a conflict resolution algorithm, the resolution algorithm cr, is defined as follos*
cr, (A&!" set %if A , & t&e'{A}
elsecr(A&!
e'dif
Proposition !0 If the pairise conflict resolution cr is independent, then cr, is coordinated*
(efinition !" 4)epulsive )esolution6 A conflict resolution algorithm cr is repulsive if all resolutionscomputed %y the algorithm are pairise repulsive, i*e*, for all conflicting aircraft A and &:
RA cr4A, &6 and R& cr4&, A6 implies KT 4RA,R&6 L KT 4A,&6*
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
13/22
In contrast to coordinated resolutions, repulsive resolutions separate%ut not necessarily solve a conflict*
Boever, the iteration of a repulsive algorithm is epectedto eventually solve the conflict*
7 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
14/22
(efinition !9 et cr %e a conflict resolution algorithm, e define the algorithm crn recursively on n 0:
crn(A&!" set %if n G 0 t&e'{A}
elseR "% -
f$reac& RA cr4A, &6 d$f$reac& R& cr4&, A6d$
R "% R . crn!(RAR&!d$'e
d$'eR
e'dif
(espite the epectation, the iteration of a repulsive conflict resolution algorithm does not alays yield
a coordinated algorithm* This is not even the case if the iteration is performed infinitely many times*
e provide sufficient conditions for finite and infinite convergence of repulsive algorithms into coordinated
algorithms*
Proposition !! 4(efinite onvergence6 et cr%e a repulsive conflict resolution algorithm and %e astrictly positive constant, i*e*, L 0* If for any pair of conflicting aircraft A and &, and resolution
maneuversRA cr4A, &6 and R& cr4&, A6, it holds that
KT 4RA,R&6 KT 4A, &6
,
then there eists a natural num%er ' such that cr' is a coordinated conflict resolution algorithm*
Proposition !2 4
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
15/22
" of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
16/22
e note thatpairise resolution algorithms are a special case of resolution algorithms for multiple aircraft
here the set of aircraft is a singleton* Indeed, the pairise coordinated algorithms are the coordinated
algorithms for 2 aircraft*
As in the case of pairise conflict resolution, resolution algorithms for multiple aircraft can %e iterated*
(efinition 23 et cMr%e a resolution algorithm for multiple aircraft, e define the algorithm cMrn
%y
induc- tion on n 0 as follos*
cMr
n
(A{A0, * * * , Am}!" set% let N % {A0, * * * , Am}i' ifn G 0 t&e'{A}
elseR "% -f$reac& RA cMr4A, N6 d$
f$reac& RA0 cMr4A0, N A0 . {A}6 * * * RAm cMr4Am, N Am . {A}6 d$R "% R .
d$'ed$'eR
e'dif
cMrn!
(RA{RA , * * * , RA }!
The rest of this section gives a sufficient condition that guarantees that the iteration of a
resolution algorithm for multiple aircraft is coordinated*
(efinition 2> 4,-$egment6 et , %e a priority relation that is sta%le %y velocity changes* The ,-segments of a set of aircraft states N are the donard close su%sets of N* That is, S is a ,-segment of Nif and only if
!* S 0 N, and
2* for all A N and & S, if A , & then A S*
The cardinality of the greatest solved ,-segment of N is denotedONP*
(efinition 2@ 4Progressive )esolution6 A resolution algorithm for multiple aircraft cMr is progressiveif it increases the si1e of solved ,-segments, i*e*, for all N and al l sets of the form {RA0 , * * * , RAm},,hereRAi cMr4Ai, N {Ai}6, it holds that ONP E O{RA0, * * * ,RAm}P*
Proposition !3 If the conflict resolution algorithm for multiple aircraft cMr is progressive, then cMr'
is coordinated for ' aircraft*
I?*
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
17/22
9 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
18/22
A tangential independentvertical-only resolution maneuver RO for the onship satisfies
KT 4RO, I6 G !,
vRO7 G vO7, and
vROy G vOy *
Therefore,
RO4t6 G 4sO7 D tvO7, sOy D tvOy, sRO 1D tvRO 16 for all t* 4!06
rom ormulas 496, H4RO4J 6, I4J 66 G !, here J is the timeof closestseparation for aircraft states
ROand I* ets G sO sI , v G vO vI , v
1 G vRO vI ,
H4RO4J 6, I4J 66 G
!
ksI4J6 s k G !, from ormula 4@63
s2 2
ma474J 6 D sy 4J6
(
,| s1 D J v1 |
6 G !, from ormulas 4>6 and 4!06B
ma4
p4s7 D J v 6
2 D 4sy D J
vy 62,(
+4s
DJ v
62D4s
yDJ
vy
62
| s1 D J v0 |
6 G !*B
| s1DJ v0
Thus, %oth epressions ( and B are less than or eual to ! and one of them is
eual to !* $tudying the variation of these epressions in the neigh%orhood of J e can prove that actually%oth epressions are eual to !* Therefore, the solutions touch the top or the %ottom circle of theprotected
1one, i*e*,
p4s7 D Jv76
2 D 4sy D Jvy 62
(|s1 D J v
1 |
G !, and 4!!6
G !* 4!26
Bormula 4!!6 is a uadratic euation ith t,o possi%le solutions for J:
J2
Gs7 v7 sy vy 2 discr4s7 , sy , v , vy 6
,
here
7 D vy
discr4s7, sy , v7, vy 6 G (2
4v2
D v2
6 4s7vy sy v762*7 y
$ince the aircraft are in conflict %ut not in violation, there is a time t here the aircraft lose hori1ontal
separation, i*e*,
p4s7 D tv76
2 D 4sy D tvy 6
2
(
E !*
Thus, discr4s7, sy , v7, vy 6 L 0* If the relative ground speed of the aircraft is non-1ero, i*e*, v2 D v2 G 0,7 y
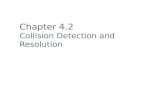
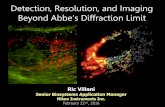
the t,o solutions for J eists and J E JD* onsider the solution for J that touches the top circle ofthe
protected 1one* igures ! and 2 illustrate the cases s1 B and s1 E B , respectively* The time J thatyields a vertical solution is given %y
4 JD if s B, JG
Jotherise*
hen the relative ground speed of the aircraft is non-1ero, ormula 4!26 yields the folloing vertical
resolution maneuver that alays touches the top circle of the protected 1one:
s
RO4J6
1
1
1|
1
p
1
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
19/22
B s1 22vRO1 G vI1 D if v7 D vy G 0* 4!36J
!0 of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
20/22
igure !* s1 B
igure 2* s1 E B
In the case here the relative ground speed is 1ero, a possi%le vertical solution maneuver is:
2 2vRO1
G vI1
if v7
D vy
G 0* 4!>6
The vertical speed-only resolution algorithm k3)d is defined %y ormulas 4!36 and 4!>6 as follos*
k3)d(OI!" set %let s % sO sI i'let v % vO vI i'let vRO1 %
if v72 D vy
2 G 0 t&e'vI1
elsevI1 D 4B s1 6QJ
e'dif i'{4v7, vy , vRO1 6}
Proposition !> The pairise algorithm k3)d is a tangential independent vertical speed-only resolutional- gorithm*
inally, e define the resolution algorithm for multiple aircraft k3M)d as follos*
k3M)d(ON!" set %let S % {A | A , O a'd KT 4O, A6 E !}i' if S G t&e'{O}
elselet I S i'
let O1 % k3)d(OI! i'k3M)d(O1 N {I}!
e'dif
The algorithm k3M)d is recursive* Boever, it is ell-defined since the cardinality of the set of aircraftstrictly decreases at each iteration* /oreover, the algorithm is non-deterministic as an ar%itrary aircraft I is
chosen at each iteration* Once this conflict is solved, solving a conflict ith another aircraft ill only
increase the vertical speed further* Therefore, hen the recursion terminates the onship has solved all
conflicts ith the aircraft%elo it* rom this, it can %e proved that k3M)d isprogressive*
Proposition !@
!! of !3
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
21/22
!* k3M)d is independent for the onship and the set of aircraft that are %elo it*
2* k3M)d is progressive*
The folloing theorem is a corollary of Propositions !3 and !@*
Theorem !8 The conflict resolution algorithm for multiple aircraft
k3M)dnated for ' aircraft*
?* onclusion
, from (efinition 23, is coordi-
e have presented a frameor, i*e*, a setof mathematical definitions, that ena%les the characteri1ation
of state-%ased conflict detection and resolution algorithms for different assumptions on the num%er of
aircraft that maneuver to resolve a conflict* urthermore, e identify sufficient conditions that
guarantee that these algorithms satisfy properties such as correctness and completeness* Theframeor is illustrated ith eamples of original conflict detection and conflict resolution algorithms for
multiple aircraft that are completeand correct*
The characteri1ation of (5) algorithms that e propose in this or, complements less rigorous, %ut
more general, characteri1ations as the one proposed %y =uchar and ang*2, !7 or instance, Ta%le !classifies the folloing pairise state-%ased conflict resolution algorithms according to the properties they
satisfy*
?P: $elf-organi1ational voltage potential algorithm*!0
/?P: /odified voltage potential algorithm*7
+O: +eometricoptimi1ation algorithm, Unon-cooperativeV setting*"
+O-coop: +eometric optimi1ation algorithm, UcooperativeV setting*"
=&3(: Original version*!!
=&3(-coord: oordinated version*!3
Property ?P /?P +O +O-coop =&3( =&3(-coord
ompleteness+ +
Independence 4+
4+ +
Tangentiality 4+
4+ +
oordination 4 4+
4+
/inimality 4 4+
4 4
)epulsion+ +
4+
4+
Ta%le !* Properties of (5) algorithms
The chec sym%ol 4+
6 represents properties that are claimed to %e satisfied %y the developers of the
algorithms, hile the cross sym%ol 446 represents properties that are non not to hold* &lansrepresentproperties hose satisfia%ility is unnon to the authors of this paper*
inally, e stress that the mathematical developmentpresented in this paper has %een formally specified
and verified in a mechanical theorem prover* +iven the critical nature of (5) systems,e %elieve that the
use of formal methods is an essential step in the analysis, design, and implementation of the ne generation
of distri%uted air traffic managementconcepts*
)eferences
! /onin, W*-*, Cnderstanding ormal /ethods , AIT 4ormal Approaches to omputing and Information
Technology6, $pringer-?erlag, ondon, C=, 2003*
!2 of !3
'
7/25/2019 _ Vasii_Claudiu_Conflict Detection and Resolution for 1 (1)
22/22
2 =uchar, W* and ang, *, UA )evie of onflict (etection and )esolution /odeling /ethods,V I +aldino, A*, /un0o1, *, and Ayala, /*, Uormal ?erification of an Optimal Air Traffic onflict )esolution and)ecovery Algorithm,V Proceedings of the !>th orshop on ogic, anguage, Information and omputation, edited %y (*eivantand )* de Xueiro1, ?ol* >@78 of ecture 'otes in omputer $cience, $pringer-?erlag, )io de Waneiro, &ra1il, Wuly 2007,
pp* !77#!""*!@ Ore, $*, )ush%y, W* /*, and $hanar, '*, UP?$: A Prototype ?erification $ystem,V !!th International onference
on Automated (eduction 4A("#7@2*
!8 /addalon, W*, &utler, )*, +eser, A*, and /un0o1, *, Uormal ?erification of a onflict )esolution and )ecoveryAl- gorithm,V Tech* )ep* 'A$AQTP-200>-2!30!@, 'A$A angley )esearch enter, 'A$A a),Bampton ?A 238"!-2!99,C$A, April 200>*
!7 =uchar, W* and ang, *, U$urvey of onflict (etection and )esolution /odeling /ethods,V AIAA +uidance, 'avigation,and ontrol onference, ?ol* AIAA-97-3732,'e Orleans, A, August !997, pp* !3""#!397*
Top Related