Zhou 2009
5
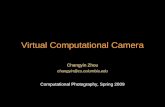
Research of Variable Pavement Vehicle SBC Based on Adaptive RBF Neural Network Sliding Mode Control Zhou Zhiguang and Zhang Guixiang College of Mechanical and Vehicle Engineering, State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body Hunan University Changsha, China Email: [email protected] and [email protected] Abstract—Automotive SBC system is a nonlinear time-varying and uncertain system, tire character changes in the scope of large, and vehicles model is uncertain, so it is difficult to establish the precise mathematical model for non-linear vehicle braking process. Based on the basis of model parameters gaining the estimated optimal slip rate, this paper presents using adaptive RBF neural network sliding mode control algorithm in the control of variable pavement vehicle SBC, with the control of vehicle under the optimal slip rate, the simulation results show that the braking performance is very good. This shows the feasibility and validity of the adaptive RBF neural network sliding mode control algorithm presented by this paper to the vehicle SBC system. Keywords- Nonlinear system; RBF Neural Network Sliding Mode Control; Pavement Recognition; SBC; Simulation . INTRODUCTION At present, because of mainly based on the experience logic threshold control, the widespread use of anti-lock braking has difficulties in the choice of threshold, the estimation of speed and the identification of road. And it is need to carry out a large number of parameter match test for different vehicle models. The control accuracy is not high enough, the portrait wheel slip rate is not maintained in the optimal slip rate in the entire control process in theory, but fluctuates in the vicinity. It is failed to achieve the best braking performance, the room to further shorten the braking distance is small [1]. The optimal slip rate control of Vehicle SBC (Sensotronic Brake Control) based on variable pavement could estimate the attachment factor between current tires and the road, determine the optimal slip rate of the variable pavement for real-time control, keep the portrait wheel slip rate maintain the optimal slip rate. Compared to ABS, the braking distance has been further shortened. Vehicles and road systems constitute a complex nonlinear dynamic systems, it is difficult to identify the pavement by using traditional linear dynamic models such as the slope rule, the vague rule and the threshold method. This paper discusses the optimal slip rate estimation question based on the model parameters, then controls the vehicle under the optimal slip rate and gets good braking performance. Automotive SBC system is a nonlinear time-varying and uncertain system, tire character changes in the scope of large, and vehicles model is uncertain, so it is difficult to establish the precise mathematical model for non-linear vehicle braking process. Most of the traditional control methods need to know the mathematical models of object, but it is difficult to obtain the precise mathematical models of actual complex systems, or difficult to solve. In this paper, adaptive sliding mode control method is used for tracking control of nonlinear system; it can reduce the dependence of information about control object. Through the use of dynamic approximation basis function of function neural network, adjusting the input of the control system adaptively and can receive the adaptive control scheme based on the RBF network sliding mode construct. Through integrating adaptive control, sliding mode control and neural network technology, the adaptive sliding mode controller based on RBF neural network is designed, the weight of the controller can learn and amend online according to the reachability condition of sliding mode control. The scheme not only removes the jitter problem of sliding mode control, but also achieves high-precision and fast tracking control of variable pavement vehicle SBC system in the presence of model error and external disturbances. . PAVEMENT RECOGNITION Vehicle SBC system based on variable pavement needs to estimate the real-time adhesion coefficient between vehicle tires and the road surface and confirm the optimal portrait slip rate of the variable pavement to implement real-time control to keep the tire portrait slip rate maintaining at the optimal slip rate, then the braking distance will be the shortest. A. Estimation of optimal slip rate At present, general use of the tire models are simplified - double linear model, Kiencke - model, Pacejka - model, Burckhardt - model and so on. This paper uses the optimal slip rate estimation based on Kiencke - model, and the curve equation describes as follows [2] us us u s u s us 2 2 1 1 ) ( s p s p s s 1 In (1), is the slope of s curve, and its value usually preset at about 30, and are the parameters that need to be estimated. 1 p 2 p From (1), by using the method of seek extremum, the 2009 International Conference on Electronic Computer Technology 978-0-7695-3559-3/09 $25.00 © 2009 IEEE DOI 10.1109/ICECT.2009.84 536
-
Upload
anand-kesarkar -
Category
Documents
-
view
3 -
download
0
description
Zhou 2009
Transcript of Zhou 2009

Research of Variable Pavement Vehicle SBC Based on Adaptive RBF Neural Network Sliding Mode Control
Zhou Zhiguang and Zhang Guixiang College of Mechanical and Vehicle Engineering,
State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body Hunan University Changsha, China
Email: [email protected] and [email protected]
Abstract—Automotive SBC system is a nonlinear time-varying and uncertain system, tire character changes in the scope of large, and vehicles model is uncertain, so it is difficult to establish the precise mathematical model for non-linear vehicle braking process. Based on the basis of model parameters gaining the estimated optimal slip rate, this paper presents using adaptive RBF neural network sliding mode control algorithm in the control of variable pavement vehicle SBC, with the control of vehicle under the optimal slip rate, the simulation results show that the braking performance is very good. This shows the feasibility and validity of the adaptive RBF neural network sliding mode control algorithm presented by this paper to the vehicle SBC system.
Keywords- Nonlinear system; RBF Neural Network Sliding Mode Control; Pavement Recognition; SBC; Simulation
. INTRODUCTIONAt present, because of mainly based on the experience
logic threshold control, the widespread use of anti-lock braking has difficulties in the choice of threshold, the estimation of speed and the identification of road. And it is need to carry out a large number of parameter match test for different vehicle models. The control accuracy is not high enough, the portrait wheel slip rate is not maintained in the optimal slip rate in the entire control process in theory, but fluctuates in the vicinity. It is failed to achieve the best braking performance, the room to further shorten the braking distance is small [1]. The optimal slip rate control of Vehicle SBC (Sensotronic Brake Control) based on variable pavement could estimate the attachment factor between current tires and the road, determine the optimal slip rate of the variable pavement for real-time control, keep the portrait wheel slip rate maintain the optimal slip rate. Compared to ABS, the braking distance has been further shortened.
Vehicles and road systems constitute a complex nonlinear dynamic systems, it is difficult to identify the pavement by using traditional linear dynamic models such as the slope rule, the vague rule and the threshold method. This paper discusses the optimal slip rate estimation question based on the model parameters, then controls the vehicle under the optimal slip rate and gets good braking performance.
Automotive SBC system is a nonlinear time-varying and uncertain system, tire character changes in the scope of large, and vehicles model is uncertain, so it is difficult to
establish the precise mathematical model for non-linear vehicle braking process. Most of the traditional control methods need to know the mathematical models of object, but it is difficult to obtain the precise mathematical models of actual complex systems, or difficult to solve. In this paper, adaptive sliding mode control method is used for tracking control of nonlinear system; it can reduce the dependence of information about control object. Through the use of dynamic approximation basis function of function neural network, adjusting the input of the control system adaptively and can receive the adaptive control scheme based on the RBF network sliding mode construct. Through integrating adaptive control, sliding mode control and neural network technology, the adaptive sliding mode controller based on RBF neural network is designed, the weight of the controller can learn and amend online according to the reachability condition of sliding mode control. The scheme not only removes the jitter problem of sliding mode control, but also achieves high-precision and fast tracking control of variable pavement vehicle SBC system in the presence of model error and external disturbances.
. PAVEMENT RECOGNITION
Vehicle SBC system based on variable pavement needs to estimate the real-time adhesion coefficient between vehicle tires and the road surface and confirm the optimal portrait slip rate of the variable pavement to implement real-time control to keep the tire portrait slip rate maintaining at the optimal slip rate, then the braking distance will be the shortest.
A. Estimation of optimal slip rate At present, general use of the tire models are simplified
- double linear model, Kiencke - model, Pacejka - model, Burckhardt - model and so on. This
paper uses the optimal slip rate estimation based on Kiencke - model, and the curve equation describes as follows [2]
u s u su s u s
u s
2211
)(spsp
ss��
��� 1
In (1), � is the slope of s�� curve, and its value usually preset at about 30, and are the parameters that need to be estimated.
1p 2p
From (1), by using the method of seek extremum, the
2009 International Conference on Electronic Computer Technology
978-0-7695-3559-3/09 $25.00 © 2009 IEEE
DOI 10.1109/ICECT.2009.84
536

optimal slip rate and peak adhesion coefficient can be obtained as follows
opts optu
21
2
�� psopt 2
21
21 2�
��
ppopt
�� 3
Make equivalent transform from (1), the result is Tppssssss ]][)()([)( 21
2���� �� 4
In (4), time variable parameters and can be obtained from Kalman Filter method or recursive least square algorithm with forgetting factor [3][4]. The real-time estimated optimal slip rate along with the pavement conditions changing can be obtained according to (2).
1p 2p
opts
B. Tire simulation model In this paper the Burckhardt u - model brought
forward by Burckhardt is used in the computer simulation, and its mathematical expression is [5]
s
sCsCCsu 321 )]exp(1[)( ���� 5
In (5), , and are parameters, and the values of this three parameters under different road conditions are given in table .
1C 2C 3C
TABLE . TYPICAL VALUE OF THE PARAMETERS IN EQUATION (5) UNDER DIFFERENT ROAD CONDITIONS
Pavement Types 1C 2C 3Cdry asphaltum 1.2801 23.99 0.52 wet asphaltum 0.857 33.822 0.347 dry concrete 1.1973 25.168 0.5373 dry cobble 1.3713 6.4565 0.6691 wet cobble 0.4004 33.7080 0.1204
snow 0.1946 94.129 0.0646 ice 0.05 306.39 0
From (5), by using the method of seek extremum, the optimal slip rate and peak adhesion coefficient can be obtained as follows
opts optu
3
21
2
ln1CCC
Csopt � 6
)ln1()(3
21
2
31 C
CCCC
Csu optopt ��� 7
By changing the value of the three parameters ,
and to simulate different pavement conditions in the compute simulations, using the optimal slip rate obtained from (6) as the target value to compare with the real slip rate.
1C 2C3C
. SINGLE WHEEL VEHICLE MODEL
To simplify the research question, using single wheel vehicle model shown in Figure 1. Ignore the air resistance and wheel rolling resistance, the movement equation describes as follows
m
bT
NxF
v
R�
Figure 1. Single wheel vehicle model
Vehicle movement equation 8xFvm ���
Wheel movement equation 9bx TRFI ���
�Wheel portrait friction �NFx � 10
In (8) to (10), is the wheel portrait friction, xF)(sFF xx � is the mass of the vehicle, v is the
speed of the vehicle, m
� is the adhesion coefficient between wheel and pavement surface, I is the moment of inertia of the wheel, � is the angle speed of the wheel, R is the radius of the wheel, is the braking torque,
is the normal reacting force from wheel to pavement surface
bTN
In the braking condition slip rate is defined as
vRvs ��
� (11)
. SIMULATION AND RESEARCH
A. The design of adaptive RBF neural network sliding mode controller
Broom head and Lowe applied Radial Basis Function(RBF) which was used in multi-variable interpolation in the design of neural network and formed the radial basis function neural network [6], which is a local approach network that can approximate any arbitrary precision continuous function, can greatly speed up Learning speed and avoid local minimum problem, the structure shown in Figure 2. RBF network is a three-tier feed-forward network with single hidden layer, the input layer is constructed with signal source nodes, input vector mapped to the second level hidden space directly, the transform function of hidden cell is RBF, Gaussian function is selected in this paper, that is
mjb
ch
j
jj �21)
||||exp( 2
2
��
��
12
In (12), is the input signal vector of RBF network, jc
537

is the center of jth nodes of RBF network, is the base
width parameter of node and .jb
j 0jb
1
2
n
1h
2h
mh
� bT
1w
2w
mw� �
Figure 2. Structure of RBF neural network
Considering the switch function as the input of RBF network and sliding mode controller as the output of RBF network, using the learning function of neural network, then it could realize single-input single-output of the neural sliding mode control [7].
VehicleModel
Pavement Recognition
s
opts
Adaptive Law
RBFNetwork)()()( tetcet
�
�� bT
Figure 3. Vehicle braking system diagram of neural sliding mode control
Select braking torque as control variable. The control goal is to seek the control law that can let the real slip rate s fluctuate near the optimal slip rate .Vehicle braking system diagram of neural sliding mode control is shown in Figure 3. Switch function is designed as
bT
opts
)()()( tetcet�
�� 13In (13),
)()()( tstste opt �� 14The output of the RBF network sliding mode controller
is the vehicle braking torque,
��
���
m
j j
jjb b
cwT
12
2
)||||
exp(
15
In (15), is the number of neurons in hidden layer, is the weight of the jth node.
m jw
The control target is , according to Lyapunov stability theory, only when meet the sliding mode
reachable condition , the controlled system
could convergence to origin under the effect of [8].
0)()( ��
tt
0)()( �
tt
bTIn this paper, using RBF network to approach the
relation between sliding variable )(t and . It must meet the premise that the sliding mode is reachable. Then the weight of the network can be modified on-line, and the aim of the modification is to seek the optimal weight for obtaining stable convergence character. The modification method is gradient descent method.
bT
)()(
)()()(
)()()(
twtT
tTtt
twttw
j
b
bjj �
��
���
��
��
��� �� 16
In (16), � is adaptive rate, and 0� .For
)()()()(
)()()( tb
tTtt
tTtt
bb
��
��
��
���
17
)||||
exp()()(
2
2
j
j
j
b
bc
twtT �
����
18
Then the RBF network weight learning algorithm is
)()()||||
exp()( 2
2
�
� jj
jj ht
bc
tw ��
���
19
In (19), is the input parameter of the system, b � is the learning speed which is the multiply of and b � , and
0� .As a result, the weight between hidden layer and output
layer could be adjusted on-line to realize the learning ability of RBFNN. The weight adjusting algorithm is
))2()1(()1()( ��������
twtwwtwtw jjjjj �20
B. Simulation result In order to verify the feasibility of neural sliding mode
control algorithm in vehicle SBC system, according to the vehicle model and controller model in this paper, using simulation software to construct the vehicle SBC simulation model, the main simulation parameters are as follows: single wheel vehicle vertical load kgm 350� , the
braking wheel initial speed is , wheel rolling radius is
hkmv /1600 �mR 3.0� , wheel moment of inertia is
, acceleration of gravity is
, learning speed of the system is
27.1 mkgI ��2/8.9 smg �
05.0�� .Simulation on single pavement portrait adhesion
coefficient 8.0�� . Transformation curve between wheel and vehicle speed, real slip rate and optimal slip rate, braking distance and portrait adhesion coefficient are shown
538

in Figure 4 to Figure 7. The braking distance is 117.9m, braking time is 5.44s.
0 1 2 3 4 5 60
50
100
150
200
Spe
ed/(k
m/h
)
Time/s
Vehicle SpeedWheel Speed
Figure 4. Transformation curve between wheel and vehicle speed
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
Time/s
Por
trait
Slip
Rat
e
Actual Slip RateOptimal Slip Rate
Figure 5. Transformation curve between actual slip rate and optimal slip rate
Simulation on variable pavement. The input signal of different pavement types is shown in Figure 8. Transformation curve between wheel and vehicle speed, real slip rate and optimal slip rate, braking distance are shown in Figure 9 to Figure 11. The braking distance is 142.0m, braking time is 7.32s.
0 1 2 3 4 5 60
20
40
60
80
100
120
Time/s
Bra
king
Dis
tanc
e/m
Figure 6. Transformation curve of braking distance
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Time/s
Por
trait
Adh
esio
n C
oeffi
cien
t
Figure 7. Transformation curve of portrait adhesion coefficient
0 2 4 6 80
0.2
0.4
0.6
0.8
1
Time/s
Adh
esio
n co
effic
ient
Figure 8. Input signal of different pavement types
0 2 4 6 80
50
100
150
200
Time/s
Spe
ed/k
m/h
Vehicle SpeedWheel Speed
Figure 9. Transformation curve between wheel and vehicle speed
0 2 4 6 80
0.2
0.4
0.6
0.8
1
Time/s
Por
tait
Slip
Rat
e
Actual Slip RateOptimal Slip Rate
Figure 10. Transformation curve between actual slip rate and optimal slip rate
539

0 2 4 6 80
50
100
150
Time/s
Bra
king
Dis
tanc
e/m
Figure 11. Transformation curve of braking distance
. CONCLUSION
During the braking process in the conditions of single pavement and variable pavement. From Figures 4 and 9, we can see that the actual slip rate tracks the optimal slip rate well, and the braking distance and braking time is also very short. The braking distance and braking time on high adhesion coefficient single pavement ( 8.0�� are both shorter than on the variable pavement, it is in line with the actual situation.
Comparing Figure 3 and 8 we can that the changing of the pavement has influence on the changing trend of wheel speed and vehicle speed. On high adhesion coefficient, the wheel speed and vehicle speed decline fast and the curve is steep; On low adhesion coefficient, wheel speed and vehicle speed declines small, and the curve is moderate; When the next two pavement adhesion conditions change a lot, the wheel speed and vehicle speed will also change greatly, it is in line with the actual situation.
Throughout the process of braking, even when the two adjacent pavement adhesion conditions change largely, the wheel doesn't appear the phenomenon of locked braking, which is in line with the actual requirements, and verify the feasibility of the neural sliding mode control algorithm in the vehicle SBC system.
REFERENCE
[1] Cheng Jun, Theory and application for automotive antilock braking system, Beijing: Beijing Institute of Technology, 1999.
[2] Kinche U, Dasis A, Estimation of Tyre Friction for Enhanced ABS-systems, Tokyo: In Proc. Aveg Congress, 1994.
[3] Liu Guofu, Zhang Qi, and Wang Yueke, “The study of sliding mode variable structure control of the Anti-lock Braking system based on optimal slip ratio”, Journal of National University of Defense Technology, vol. 26, no. 2, pp. 70-74, 2004.
[4] Liu Guofu, Zhang Qi, Wang and Yueke, “Study of calculation of model-based optimal slip ratio”, Journal of highway and transportation research and development, vol. 21, no. 7, pp. 111-114, 2004.
[5] M Burckhardt and Fahrwerktechnik, Radschlupf- Regelsysteme. Wrzburg: Vogel Verlag, 1993.
[6] Broomhead Lowe and Mult ivaribale, “functional interpolation and adaptive networks”, Complex Systems, vol. 2, no. 3, pp. 21-35, 1998.
[7] Liu Jinkun, MATLAB simulation for sliding mode control, Beijing: Qinghua University, 2005.
[8] Gao Weibing, Theory and design method for variable structure control. Beijing: Science, 1998.
[9] Huang S J, Huang K S and Chiou K C, “Development and application of a novel radius function sliding mode controller”, Mechatronics, no.13, pp. 313-329, 2003.
[10] Fangjun Jiang and Zhiqiang Gao, “An adaptive nonlinearfilter approach to the vehicle velocity estimation for ABS”, IEEE Trans. Control Applications, vol. 1, pp. 490-495, 2000.
[11] P. Delaigue and A. Eskandarian, “A comprehensive vehicle braking mode for predictions of stopping distance”, IEEE Trans. Automobile Engineering, vol. 218, pp. 1409-1416, 2004.
[12] H.S.Choi, Y. H. Park, Y. S. Cho, et al, “Global sliding mode control. Improved design for a brushless DC motro”, IEEE control systems magazine, vol.21, no. 3, pp. 27-35, 2001.
[13] C. T. Li and Y. H. Tan, “Neural sliding mode control for systems with hysteresis”, Proceedings of the 2005 IEEE International Symposium on Intelligent Control, pp. 467-472, 2005.
540