Z-Basic algorithm for collision avoidance system
7
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991 ~ 915 2-Basic Algorithm for Collision Avoidance System Roger G. Dear and Yosef S. Sherif Abstract-A 2-Basic prediction algorithm for aircraft ground-based collision avoidance system is presented. This system searches for mutually overlapping prediction intervals that are influenced by aircrafts’ maneu- ver capabilities and surveillance accuracy. Z-Basic provides a powerful, fast, interactive, simple to use and inexpensive Basic compiler. The algorithm is applied to a typical terminal airspace situation. The computer program was executed on a Macintosh+. The execution time is less than one minute. The program is easy to understand and implement. I. INTRODUCTION T PRESENT, the nationwide flow of air traffic into some 40 A major, key airports is being monitored and controlled through a master flow control program by the Federal Aviation Administration (FAA). In the United States, there are at least some 14 000 air traffic controllers, trainees and assistants, working in three basic facilities: 398 airport towers, 18 terminal radar approach control (Tracon) installations, and 20 en route control centers. Also there are at least 4000 commercial jets and 210 000 general aviation planes licensed in the United States [5]-[SI. 11. OPERATING PROCEDURES The FAA requires that all aircraft maintain a minimum in-trail separation distance of three miles. This rule applies for planes landing or taking off at a controlled airport when the leading plane is no larger than the trailing plane; otherwise there are special rules of four, five or six-mile separation. Furthermore, there are a few airports at which a 2.5-mi in-trail separation is permitted, provided that at that airport, runway occupancy time is less than 50 s. There are many other separation rules. For example, before getting into the landing pattern, aircraft “in the terminal area” have minimum separation of five miles if they are at the same altitude. For landings on closely spaced parallel runways, the minimum separation is 750 ft between the center lines of the runways, provided that the meteorological conditions are visual. In instrument meteorological conditions, the minimum separation for independent landings at closely spaced parallel runways is 4300 ft between center lines, although the FAA is now doing some experiments in the hope of reducing that to 3000 ft. Most of the operating procedures of the Air Traffic Control (ATC) explained above had been replaced in the mid 1980s by a third-generation system that is based on the following: 1) limited automation to assist the human controller, 2) automated data acquisition, including identity, altitude, and position provided by the Air Traffic Control Radar Beacon System (ATCRBS) backed up by transponders, and 3) voice communication. ATCRBS with mode C modification can down link aircraft identifications and altitude when interrogated from the ground [2], [3], [9]. Further refinements (mode S) on ATCRBS involve a fully automated surveillance system using a greater amount of information from more sophisticated, digitized transponders [ 131. Manuscript received August 11, 1990; revised February 8, 1991. R. G. Dear is with the California State University, Department of Manag- ment Science, Fullerton, CA 92634. Y. S. Sherif is with the California Institute of Technology, Jet Propulsion Laboratory, Mailstop 1251233, 4800 Oak Grove Drive, Pasadena, CA 91109. IEEE Log Number 9143740. 111. COLLISION AVOIDANCE SYSTEMS A collision avoidance system (CAS) should have the following functions; 1) To detect and evaluate potential collision hazards t o the aircraft involved, 2) To indicate the threat to the pilots involved with sufficient advanced warning, and 3) To provide the pilot with appropriate command signals indicating a satisfactory evasive maneuver. Many collision avoidance systems had been proposed and investigated by the FAA [l], [4], [lo]-[15]. These systems include the following: 1) The Traffic Alert and Collision Avoidance System (TCAS I), 2) Airborne Collision Avoidance System, and 3) Ground-based Collision Avoidance-Intermittent Positive Control (IPC) system. This system employs a computer located on the ground to perform the functions of conflict detection and evaluation. Appropriate avoidance instructions are then uplinked to the pilot. Two different types of commands can be given: Negative (e.g., Don’t turn right, Don’t climb, etc.) and Positive (e.g., Turn right, Climb, etc.). All aircraft must be equipped with transponders that provide for the data link from the ground. The ground-based CAS with both negative and positive commands is known as intermittent positive control (IPC). This sytem has four major advantages: 1) The burden of conflict detection, evaluation and resolution is removed from the pilot. The pilot must, however, comply with any commands that are given. 2) The airspace is now coordinated. That is, the commands to alleviate a hazard take into account other aircraft, thus preventing one maneuver from causing another conflict. 3) The negative commands allow maximum freedom to pilots, who otherwise would be subjected to greater control than desired. Since aircraft generally fly along straight lines, a negative command will rarely interfere with a pilot’s intentions. 4) IPC relieves the controller of the workload associated with collision avoidance, thus allowing more time for other duties. This ground-based CAS does require a somewhat sophisticated transponder to be placed on all aircraft. The cost of the transponder will be at least an order of magnitude less than the fully-equipped airborne CAS equipment, but the in- stallation into the projected 500 000 aircraft of 1995 is a major undertaking. In addition to the transponders, each aircraft must have some type of communication equipment, a display for instance, which notifies the pilot whenever a command is given. This communication equipment adds to the overall cost of IPC as does the cost of maintaining the computer stations. IV. BASIC ASSUMPTIONS OF THE PREDICTION ALGORITHM It is assumed that each aircraft has its position and velocity estimated every 1 s where 1 is the system update time. Moreover, these position and velocity estimates are presented in a fixed s. y. 3 coordinate frame, with the s and y coordinates corresponding to the horizontal plane, and the i coordinate pertains to altitude. One further assumption concerns tw, a prescribed warning time. It is assumed that a warning time, tu is large enough so that if a conflict may occur at a time t > tu, the conflict may be safely averted by the issuance of satisfactory commands. Generally, a collision occurs when the aircraft separation between two aircraft equals zero in all three dimensions. Accordingly, a potential collision occurs whenever the inter-aircraft separation may equal zero in all three dimensions within tu the given warning time. This potential collision will be called a conflict. For a conflict to exist, conditions must be hazardous in the .r direction, hazardous in the y direction, and also hazardous in the 3 direction. 0018-9472/91$01.00 0 1991 IEEE
Transcript of Z-Basic algorithm for collision avoidance system

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991
~
915
2-Basic Algorithm for Collision Avoidance System
Roger G. Dear and Yosef S. Sherif
Abstract-A 2-Basic prediction algorithm for aircraft ground-based collision avoidance system is presented. This system searches for mutually overlapping prediction intervals that are influenced by aircrafts’ maneu- ver capabilities and surveillance accuracy. Z-Basic provides a powerful, fast, interactive, simple to use and inexpensive Basic compiler. The algorithm is applied to a typical terminal airspace situation. The computer program was executed on a Macintosh+. The execution time is less than one minute. The program is easy to understand and implement.
I. INTRODUCTION
T PRESENT, the nationwide flow of air traffic into some 40 A major, key airports is being monitored and controlled through a master flow control program by the Federal Aviation Administration (FAA). In the United States, there are at least some 14 000 air traffic controllers, trainees and assistants, working in three basic facilities: 398 airport towers, 18 terminal radar approach control (Tracon) installations, and 20 en route control centers. Also there are at least 4000 commercial jets and 210 000 general aviation planes licensed in the United States [5]-[SI.
11. OPERATING PROCEDURES
The FAA requires that all aircraft maintain a minimum in-trail separation distance of three miles. This rule applies for planes landing or taking off at a controlled airport when the leading plane is no larger than the trailing plane; otherwise there are special rules of four, five or six-mile separation. Furthermore, there are a few airports at which a 2.5-mi in-trail separation is permitted, provided that at that airport, runway occupancy time is less than 50 s. There are many other separation rules. For example, before getting into the landing pattern, aircraft “in the terminal area” have minimum separation of five miles if they are at the same altitude. For landings on closely spaced parallel runways, the minimum separation is 750 ft between the center lines of the runways, provided that the meteorological conditions are visual. In instrument meteorological conditions, the minimum separation for independent landings at closely spaced parallel runways is 4300 ft between center lines, although the FAA is now doing some experiments in the hope of reducing that to 3000 ft. Most of the operating procedures of the Air Traffic Control (ATC) explained above had been replaced in the mid 1980s by a third-generation system that is based on the following: 1) limited automation to assist the human controller, 2) automated data acquisition, including identity, altitude, and position provided by the Air Traffic Control Radar Beacon System (ATCRBS) backed up by transponders, and 3) voice communication. ATCRBS with mode C modification can down link aircraft identifications and altitude when interrogated from the ground [2], [3], [9]. Further refinements (mode S) on ATCRBS involve a fully automated surveillance system using a greater amount of information from more sophisticated, digitized transponders [ 131.
Manuscript received August 11, 1990; revised February 8, 1991. R. G. Dear is with the California State University, Department of Manag-
ment Science, Fullerton, CA 92634. Y . S. Sherif is with the California Institute of Technology, Jet Propulsion
Laboratory, Mailstop 1251233, 4800 Oak Grove Drive, Pasadena, CA 91109. IEEE Log Number 9143740.
111. COLLISION AVOIDANCE SYSTEMS
A collision avoidance system (CAS) should have the following functions; 1) To detect and evaluate potential collision hazards t o the aircraft involved, 2) To indicate the threat to the pilots involved with sufficient advanced warning, and 3) To provide the pilot with appropriate command signals indicating a satisfactory evasive maneuver. Many collision avoidance systems had been proposed and investigated by the FAA [l] , [4], [lo]-[15]. These systems include the following: 1) The Traffic Alert and Collision Avoidance System (TCAS I), 2) Airborne Collision Avoidance System, and 3) Ground-based Collision Avoidance-Intermittent Positive Control (IPC) system. This system employs a computer located on the ground to perform the functions of conflict detection and evaluation. Appropriate avoidance instructions are then uplinked to the pilot. Two different types of commands can be given: Negative (e.g., Don’t turn right, Don’t climb, etc.) and Positive (e.g., Turn right, Climb, etc.). All aircraft must be equipped with transponders that provide for the data link from the ground. The ground-based CAS with both negative and positive commands is known as intermittent positive control (IPC). This sytem has four major advantages: 1) The burden of conflict detection, evaluation and resolution is removed from the pilot. The pilot must, however, comply with any commands that are given. 2) The airspace is now coordinated. That is, the commands to alleviate a hazard take into account other aircraft, thus preventing one maneuver from causing another conflict. 3) The negative commands allow maximum freedom to pilots, who otherwise would be subjected to greater control than desired. Since aircraft generally fly along straight lines, a negative command will rarely interfere with a pilot’s intentions. 4) IPC relieves the controller of the workload associated with collision avoidance, thus allowing more time for other duties. This ground-based CAS does require a somewhat sophisticated transponder to be placed on all aircraft. The cost of the transponder will be at least an order of magnitude less than the fully-equipped airborne CAS equipment, but the in- stallation into the projected 500 000 aircraft of 1995 is a major undertaking.
In addition to the transponders, each aircraft must have some type of communication equipment, a display for instance, which notifies the pilot whenever a command is given. This communication equipment adds to the overall cost of IPC as does the cost of maintaining the computer stations.
IV. BASIC ASSUMPTIONS OF THE PREDICTION ALGORITHM It is assumed that each aircraft has its position and velocity
estimated every 1 s where 1 is the system update time. Moreover, these position and velocity estimates are presented in a fixed s. y. 3
coordinate frame, with the s and y coordinates corresponding to the horizontal plane, and the i coordinate pertains to altitude. One further assumption concerns tw, a prescribed warning time. It is assumed that a warning time, tu is large enough so that if a conflict may occur at a time t > tu, the conflict may be safely averted by the issuance of satisfactory commands.
Generally, a collision occurs when the aircraft separation between two aircraft equals zero in all three dimensions. Accordingly, a potential collision occurs whenever the inter-aircraft separation may equal zero in all three dimensions within tu the given warning time. This potential collision will be called a conflict. For a conflict to exist, conditions must be hazardous in the .r direction, hazardous in the y direction, and also hazardous in the 3 direction.
0018-9472/91$01.00 0 1991 IEEE

916 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991
For a hazardous condition to exist in the 2 direction it must be possible for two aircraft to have the same .z coordinate t , from the last measurement. Similar definitions exist for the y and i directions.
By defining a conflict in this manner, a natural collision avoidance algorithm arises. All one need do is check for hazardous situations in the three dimensions and issue commands whenever all three dimensions are hazardous. Thus the algorithm predicts whether a collision may occur tu: s from the last measurement by examining each direction separately. The algorithm does not concern itself with a conflict that may occur in a time less than tu! s since theoretically this has been uncovered by previous measurements.
Consider the information received every A s. Estimates are made of P, (the position on the x-axis) and V, (the velocity in the I direction) for each aircraft. If these estimates were perfect and if all aircraft remained on linear flight the position of all aircraft on the x-axis at a time t , into the future would be determined exactly. Consider one aircraft, assume that at t = 0 (the time of the last measurement), the aircraft under consideration is estimated to be at s = 0 travelling with an estimated velocity, V,. Under the assumptions of perfect surveillance and linear flight, the aircraft will be at t,V, on the x- axis exactly t , s later. Now consider the possibility of P, being in error by as much as a quantity. 6,(6, > 0), while there is no error in Vz. The aircraft's position cannot be known for certain t , s later. Rather it is known that the aircraft may be anywhere within the interval (twVz - 6,, t,V, + 6,). It is also possible that P, is correct, but the estimate of V, is in error by as much as a quantity E ~ ( E ~ > 0). In this case, t , s later the aircraft will be anywhere within the interval (t,(Vz - ~, ) . t , (Vz + E,) . Moreover, if the possibility is allowed that the position estimate is off by at most 6,, and the velocity estimate by at most E,, then t , s late the aircraft may be anywhere in the interval ( f , (V , - e,) - 6,.t,(V, + E , ) + 6,). If the last case is considered typical, the prediction region is not a point as with perfect surveillance, but an interval of width 2(6, + t ,cz). This interval is defined as the surveillance interval in the .z direction.
Thus for purely linear flights, the one-dimensional (1-D) collision avoidance algorithm can be stated as follows: Find the surveillance intervals on the 1-D line that all aircraft may occupy t , s ahead; and if any intervals overlap, the aircraft associated with those intervals are said to be hazardous in the dimension under consideration. Consequently, if any two aircraft have predicted surveillance intervals that overlap in all three dimensions, an actual conflict exists. The conflict is called an actual conflict, because it is possible that the aircraft may occupy the same spa.ce at the same time by continuing on linear flight. To resolve this conflict, at least one positive command is necessary.
Until now, the model has Ibeen concerned with linear flight. The discussion must be extended to include maneuvering aircraft. Essentially, any maneuver by an aircraft either increases or de- creases the predicted distance [:ravelled along any one dimension in t , s . Moreover, there is a maneuver that maximizes this in- crease (in the dimension of concern) and also a maneuver that maximizes this decrease. It is then a simple matter to add to the surveillance intervals these maximum increases and decreases due to maneuvers. The combined interval is defined as the total prediction interval. The algorithm still searches for overlapping intervals, the size and exact shape of which are functions of position and velocity estimation errors and also maneuver possibilities. If the total prediction intervals of' two aircraft overlap in all three dimensions, and an actual conflict does not exist, a potential conflict is said to exist. For the resolution of a potential conflict, only negative commands are required, because linear flight will not be hazardous in all three dimensions. To summarize, the terms action
conflict and potential conflict will be formally defined: 1) Actual conflict: An actual conflict between two aircraft is said to occur whenever the predicted surveillance intervals of each aircraft overlap simultaneously in all three dimensions. 2) Potential conflict: A potential conflict between two aircraft is said to occur whenever the total prediction intervals of each aircraft overlap simultaneously in each of the three dimensions, and the predicted surveillance intervals of each aircraft do not overlap simultaneously in all three dimensions.
The maximum increases and decreases due to maneuvers are a function of aircraft heading, speed, the maximum air-turn rate, and the warning time.
V. TERMINAL AREA MODEL
In this section, the general prediction model developed in Section IV is applied to a representative terminal area. For this application, six explicit assumptions are made. They are listed below along with their motivation and a discussion of their validity.
1) Warning Time: A warning time of 30 s is assumed for t,. Both the surveillance and maneuver intervals are functions of the warning time, and an explicit number is required for computations. The adoption of a 30-s warning time is reasonable and is consistent with the fully implemented IPC.
2) Update Time: An update of 2 s is adopted (experiments for closely spaced parallel runways that are now going on at Memphis and RaleighDurham employ radars with 1-s update rate). Currently, each aircraft is scanned by radar every 4 s, but it is believed that the Mode S will have a shorter update time, hence 2 s is chosen. An update time of less than 1 s is most likely too short. The update time affects the tracking scheme, and hence the surveillance accuracy.
3) Turn Rate: A maximum turn rate of 3"/s is employed. Like the 30-s warning time, this figure is consistent with current and projected aircraft capabilities. The turn rate affects the analysis of the maneuver interval and the tracking scheme.
4) Speed Bound: Aircraft in Mixed Airspace typically fly at speeds between 120 knots and 240 knots, with very few exceptions. For this analysis, the aircraft speed is bounded by these two values. These bounds enable the computation of the maximum and minimum prediciton intervals that are encountered in the terminal area.
5 ) X . Y. 2. Coordinate Frame: It is assumed that the surveillance system transforms its information into Cartesian coordinates. Currently the radar receives slant range and elevation measure- ments. This assumption is necessary to adopt the terminal area to the prediction model.
6) Separation of Altitude Information: Aircraft do not change altitude very rapidly. Typical rates are about 10 ft/s with a maximum of 25 ftis. Also, due to the hemisphere rule and other ATC procedures, aircraft tend to fly at quantized altitudes. Consequently, the vertical and horizontal planes have different characteristics. The analysis for the terminal area separates the i direction from the horizontal plane.
VI. MANEUVER ANALYSIS
The assumptions of a 30 s warning time and a maximum turn rate of 3"/s enable a straightforward analysis of how maneuvers contribute to the total prediction interval. Consider then an aircraft is flying in the horizontal plane with a velocity V and heading angle 0. Assume perfect surveillance. Since the maximum turn rate is 3"/s,

917 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991
within 30 s the aircraft's heading will be (8 f go), under maximum turn. For this maximum turn, a circular arc is mapped out (labeled Maximum Turn Path). The arc length is 30 V and 114 of a circle is traversed (90"). Thus the radius of curvature, R , is (60 V h ) . If the maximum turn is not executed for the full 30 s, any point on the "maneuver arc" may be reached. The quantities of interest to the maneuver analysis are the largest and smallest s coordinates of the maneuver arc and also the largest and smallest y coordinates. Before obtaining these values, it is necessary to discuss how these largest and smallest coordinates influence the collision avoidance algorithm.
Imagine that the largest z ordinate is X. The d l is greater than or equal to 301;, the s ordinate when no maneuvers are enacted. (V7 = 17cos8). The quantity ( M - 3017,) equals the maximum possible distance to the right that the aircraft can obtain on the x- axis. Since the quantity (M - 301, is a function of 8, the initial heading, (and of course IT) the quantity Af - 301; will be called ~ ~ ( 0 ) . Similarly, if S is the smallest s ordinate, .Y is less than or equal to 301;. Then the quantity (301; - -Y) equals the maximum possible distance further to the left that the aircraft can obtain on the x-axis. (30V, - S) will be called 1,(0). Similar reasoning may be applied to obtainr,(B) and 1,(0) on the y-axis. The total prediction interval is both the s and P dimensions can now be analytically determined. For the .r dimension, this total prediction interval is (30(Vz - E ~ ) - & -lr(0),30(1:+~,)+6,+r,(B)). To determine r , ( 0 ) and 1,(8) as a function of 0 and I', two cases for each are considered:
5 90": When (01 5 go", it is possible to direct the aircraft totally in the s direction within 30 s by enacting a maneuver. It is easily seen that the maneuver scheme to produce the greatest x displacement is for the aircraft to turn at maximum rate in the direction of the positive x-axis until the heading is 0, at which time the aircraft stops turning and proceeds on linear flight for the remaining time. Thus for an initial heading angle of -, the amount of time in the turn is ( / 8 ( / 3 ) s and the amount of time in linear flight is (30 - lb'l/3) s. For a heading 101 _< 90" the aircraft turns on the maximum turn path for ( l8 ( /3 ) s. From the geometry, a circular arc of radius R = (GOV/x) and angle 101 is mapped out in ( l0( /3) s. This corresponds to an P ordinate of R in 101. Now the aircraft ceases to turn and travels for the remaining (30 - ]81/3) s in the I direction with velocity I- . Thus the point M defined previously is located at (Rsin 101 + (30 - \01/3)1'. And then r z ( 0 ) = ((GO/.rr)sin 181 + (30 - lT9(/3) - ~ O C O S ~ ) ~ ' ;
Case2--rz(0) when90" < 101 5 180": If90" < 181 5 BO", then it is impossible to turn at rates < 3"/s so that the aircraft has a heading of 00 within the 30 s prediction period. Consequently, the maximum .r ordinate corresponds to the furthest point on the maximum turn path of decreasing 101. Analytically, Jf is located at Rfi(cos( l8I - 45). Therefore ~ ~ ( 0 ) = ( (GOfi /x)cos( l0( - 45) - 30cost))V*; (90 < 101 5 180").
In order to determine 1,(8), which is the distance between the expected I ordinate (301' cos 8 ) and -Y, the left-most c ordinate, all one need do is to investigate the symmetry of the problem. In finding r Z ( 0 ) , the aim of the aircraft was to head at an angle of 0". To find lr(T9), it is desired that the aircraft head at an angle of 6180". Thus the analysis for 1,(0) is identical to the analysis of r z ( 8 ) but 180" out of phase. In other words, ] , ( e ) = rT(lOl - 180). An entirely similar analysis could be developed for displacement in the y direction. Due to symmetry, r , ( 0 ) = rZ(-90). Also due to symmetry l y ( 8 ) - I, (8-go), thus the analysis for the two dimensions is identical. To summarize:
Case I - + , ( 0 ) when 0" 5
(181 i 900) .
' [(:)sin,+ (30-!) - 3 0 c o s 8 ] V
[ (:) fi cos ( 0 - 45) - 30 cos 8 v 1 (2) forgo" 5 8 5 180"
' [ (:) &cos (133 - 0 ) - 30 cos (8 - 180) I/'
for 0" _< 0 5 90" (3)
1 [ (:) sin (0 - 180) + (: - 30)
- 3 0 ~ 0 s (8 - 180)]1'
(4) for90" 5 8 5 180"
' [(:)(8-90)+ ( 3 0 - 7 ( * -
- 30 COS (8 - 9O)V
for 0" 5 0 5 180"
[ ($) v5cos (8 - 90 - 43)
1 - 3 0 ~ 0 ~ ( 8 - 9 0 )
for - 180" 5 8 5 0"
(:)ficos (133 - 8 - 90)
- ~ O C O S ( ~ I - ~ O - ~ ~ O ) V
( 7 )
1 for 0" 5 0 5 180"
($) sin (8 - 90 - 180) + 30 - ~ ( - 3 0 ~ 0 s (8 - 90 - 180)lV
for - 180" 5 8 5 0". (8)
Now that ~ ~ ( 0 ) and 11(0) have been analytically determined, the effects of these quantities on the model will be investigated. Remember that the length of the surveillance interval is 2(6, $ 3 0 ~ ~ ) . When maneuvers are allowed the total prediction interval has a width 2( 5, + 305,) + r s (8) + 1, (0) . The quantity ( r , (0) + 1, ( 0 ) ) is readily identified to be the contribution to the total interval due to maneuver, hereafter called the maneuver interval.
VII. SURVEILLANCE ANALYSIS
The preceding sections have shown how the three-dimensional (3-D) collision avoidance problems have been simplified into three 1-D problems. The 1-D problems for the horizontal plane (i.e., s and y) are of primary importance and analytically similar. The avoidance algorithm searches for mutually overlapping prediction intervals. Furthermore, these prediction intervals are influenced by two factors, maneuver possibilities and surveillance errors. The first factor, maneuver possibilities, was analyzed in Section VI. Given any original heading and speed, the length of the maneuver interval in both the .r and y directions due to "maximum maneuvers" was

918 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991
analytically determined. In this section the determination of the surveillance interval will be examined.
Originally a position error in the s direction of +dz and a speed error in one direction of fc, was assumed. Consequently, the surveillance interval contributed a length of + ~ O E , ) to the total prediction interval. But, the quantities 5, and E, are probabilistic. That is, the errors in surveillance and tracking are not fixed values. They instead must be specified by their expected values and variances, etc. For convenience, the 1 subscript will be dropped from 6, and E,. It is assumed that 6 and s are zero mean random variables with standard deviations and respectively. The quantity of concern ( 6 + 30:) is also a random variable with zero mean and a standard deviation 06 + 305. To determine the size of 06 + ~ O E , the tracking scheme must be investigated. It is assumed that the surveillance system consists of a data acquisition system that provides slant range and elevation measurements. These measurements are then converted to 3-D position measurements, and are repeated every s on each aircraft in the region under investigation. From these measurements, a tracking computer provides smoothed estimates of three-dimentional position and velocity (with the possible exception of 2 velocity estimates). It is further assumed that the measurement errors are unbiased and uncorrelated between different targets and successive measurements. Real data systems always have position dependent errors, often with strong correlation of a real system in some average sense. One further assumption that the position error has a standard deviation u p .
If an aircraft follows a linear path it can be shown that a least- squares tracker is optimum and this tracer is approximated in certain real systems. If the smoothing time, T is equate to -Y data cycles (i.e., T = -TA), then it can be shown that the errors in position and velocity are related in the following manner:
(9)
Where E[.] denotes expectation. From these equations, it is seen that as T increases the position and velocity accuracy rapidly in- creases. However, if the motion differs from linear flight, biases will develop in these errors that increase rapidly in time. To account for this effect, the aircraft's motion will be modified to account for an acceleration of bounded magnitude, say la( t ) l <_ b-. Maneuvering aircraft appear to differ from linear flight due to an arbitrary acceler- ation profile. It can be shown that the errors in position and velocity upon assuming equal bias and smoothing contributions are as follows:
TABLE I PROGRAM INPUTS AND OUTPUTS
Inputs outputs
Closest Approach Between Aircraft (Miss Distance) Time Until the Closest Approach Distance Until the Closest Approach Conflict Structure Maneuver Structure
Aircraft position Aircraft Velocity Aircraft Heading Miss Distance Threshold (5,000') Uodate Time (2 seconds)
Required Avoidance Commands Position Error (300' in each direction) Velocity Error (*IO% in each direction) Heading Error ( = M O o ) Warning Time (30 seconds) Maximum Turn Rate (30' /sec)
This is an upper bound, using a maximum acceleration of f17 and the mean square error contributions (bias and smoothing) are equal (for a:).
VIII. THE COMPUTER PROGRAM The computer program implemented here describes the situation
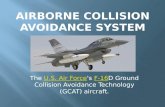
where two aircraft are flying at the same altitude. The program assumes that the maximum turn rate for the aircraft is 3"/s. The airspace is oriented in a fixed x,y coordinate frame and there is no limit on the largest or smallest coordinate (i.e., the range of both s and y are (-x. x)). Because linear flight is assumed, the heading and velocity of each aircraft is constant. In order to make this model approximate the real world, errors in position, velocity, and heading are introduced. In general, these errors may be dependent upon the aircraft's position, heading, and velocity due to the errors in data acquisition and tracting. The program was designed with this in mind. That is, the errors introduced may be specified in any manner that is believed to model the real world. For the actual test cases, the program assumed a position error of 300 ft in each direction, a velocity error of * 10% for each direction, and a heading error of &ZOO. Table I presents the inputs and outputs of the program with the values assumed in the test cases in parentheses. Fig. 1 presents the flow chart of the computer program. The flow chart divides the program into eight distinct tasks. These tasks are as follows:
Task A: Determination of protected regions. Task B: Conflict detection. Task C: Check for divergence. Task D: Conflict evaluation. Task E: Analysis of potential conflicts. Tasks F and G: Analysis of actual conflicts. Task H: Completion of the program when a positive command is
given. r A 2 6 c.62 = E(6') = 40; . ( K ) . (1.65)-' (12) Note that in Task B, there are ten possible values for each of the
maneuver overlap entries. These are as follows: 1) NONE-There is no overlap 2) SURV-There is a surveillance overlap 3) LEFT-The aircraft must turn left for an overlap 4) RITE-The aircraft must turn right for an overlap 5 ) LORR-(Left or Right) The aircraft must turn either left or
right for an overlap 6) STRA--(Straight) The aircraft must continue straight for an
overlap (This is almost like SURV. The differentiation is due
(13)
r A 2 4 E(6s ) = [ T] . [ K ] . (1.65)-' (14)

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991 919
TABLE I1 TEST CASE 1
Range Angle Velocity Heading Head Err Update Thresh N C #1 15000 135 250 -45 20 2 5000 N C 15000 0 250 160 20 2 5000
~
Time
0.0 2.0 4.0 6.0 8.0
10.0 12.0 14.0 16.0 18.0 20.0 22.0 24.0 26.0 28.0
Time to Clo App
55.9 53.9 51.9 49.9 47.9 45.9 43.9 41.9 39.9 37.9 35.9 33.9 31.9 29.9 27.9
~~
Clo App
4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8 4812.8
~~
Dist to Clo App 27295.3 26319.0 25342.7 24366.4 23390.1 224 13.8 21437.5 20461.2 19484.9 18508.6 17532.3 16556.1 15579.8 14603.5 13627.2
~~ ~~
X Overlap N C 1 NC2 NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE LEFT STRA LEFT SURV LEFT SURV SURV SURV
~ ~
Y Overlap N C 1 N C 2 SORR SORR SORR SORR SORR SORR SURV SURV SURV SURV SURV SURV SURV SURV SURV SURV SORL SORL SORL SORL SORL SORL SORL SORL SORL SORL SORL SORL SORL SORL
Maneuver N C l N C 2 NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NOL NOL NOL NOL NOL NOL NOL NOL
Command N C 1 N C 2 NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE RTNL RTNL RTNL RTNL RTNL RTNL RTNL RTNL
Protected Reyions
i) Surveillance
Divergence Iask E: Conflict Detection
I lask D: Conflict Ev al ua- tion
1 1
Conflicts Conflicts
I
I lask G: Is on4 Positive Cow Mand Sufficient?
lask H: Check for Progrm I Completion
lask H: Check for Progrm Completion
Issue lwo Posi- tive C o m a n d s
Fig. 1. Program flow chart.
I I Issue lwo Posi - tive C o m a n d s
+ Go to Task I
Fig. 1. Program flow chart.
i"
position and velocity errors generate the SURV overlap.). The last four entries must occur in pairs. In other words, if aircraft
#1 has one of these entries for a given direction, aircraft #2 must also have one of these entries.
7) SORL-(Surveillance or Left) Either the aircraft turns left causing a surveillance overlap for the other aircraft or the other aircraft turns in some manner causing a surveillance overlap for this aircraft.
8) SORR-(Surveillance or Right) Same as in 7, but with a right turn.
9) SORE4Surveillance or Either) Same as in 7, but with either a right or left turn.
10) SORS-(Surveillance or Straight) Same as in 7, but with the aircraft continuing straight.
If any entry is NONE, no conflict may exist and the program continues to Task C. If no entry is NONE the program continues to Task D.
IX. TEST CASES This section will examine the output of the computer program
for two test cases. The first case involves an actual conflict while the second case involves a potential conflict. Both cases make the following assumptions:
1) The warning time is 30 s. 2) The maximum turn rate is 3"h. 3) The update time is 2 s. 4) Position errors are 300 ft (maximum) in each direction. 5 ) Velocity errors are 10% (maximum) of the velocity in each
direction. 6) The heading error is k20" (maximum). 7) The threshold distance is 5000 ft. Case 14c tuaZ Conflict: In this case, two aircraft are examined
that have a miss distance (closest approach) less than 5000 ft, the threshold value. Since the closest approach is less than the threshold, the conflict is an actual conflict and at least one positive command
to the heading errors generating a STRA overlap, while the and one negative command are necessary. Once the commands are

920 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4, JULYIAUGUST 1991
TABLE I11 TEST CASE 2
Range Angle Velocity Heading Head Err Update Thresh A/c #1 15000 150 250 30 20 2 5000 N C #2 15000 0 250 160 20 2 sono
Y Overlap Maneuver Command clo App Dist to X Overlap Time Time to
Clo App CloApp N C I A / C ~ A / C ~ ~ / c 2 Ncl A/cl
0.0 2.0 4.0 6.0 8.0 10.0 12.0 14.0 16.0 18.0 20.0 22.0 24.0 26.0 28.0 30.0 32.0 34.0 36.0 38.0 40.0 42.0 44.0 46.0 48.0 50.0 52.0 54.0 56.0 58.0 60.0
60.1 58.1 56.1 54.1 52.1 50.1 48.1 46.1 44.1 42.1 40.1 38.1 36.1 34.1 32.1 30.1 28.1 26.1 24.1 22.1 20.1 18.1 16.1 14.1 12.1 10.1 8.1 6.1 4.1 2.1 0.1
9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1 9911.1
27230.1 26323.8 25417.5 245 11.2 23604.9 22698.6 21792.3 20886.0 19979.7 19073.4 18167.1 17260.8 16354.4 15448.1 14541.8 13635.5 12729.2 11822.9 10916.6 10010.3
8197.7 7291.4 6385.1 5478.8 4572.4 3666.1 2759.8 1853.5 947.2 40.9
9104.0
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE RITE SURV SURV SURV SURV SURV SORL SORL SORL SORL SORL SORL LEFT LEFT LEFT LEFT LEFT LEFT
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE SURV SURV SURV SURV SURV SURV SORE SORE SORE SORE SORE SORE SURV LORR LORR LORR LORR LORR
RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE
SURV SURV SURV RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE RITE
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO F NO F NO F NO F NO F NO F
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NONE NONE NONE NONE NONE NONE
NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NONE NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NO R NONE NONE NONE NONE NONE NONE
given, the program continues for three data cycles to check that one positive and one negative command is sufficient.
In this case, aircraft #1 has a range of 15 000 ft, an angle of 135", and is traveling with velocity of 250 ft/s and a heading of -45". Aircraft #2 has a range of 15 000', and an angle of 0", and is traveling with a velocity of 250 ft/s and a heading of 160". The results of case #1 are presented in Table 11. It can be seen that the miss distance (CLO APP) equals 4 8 1 2 3 , thus making this conflict an actual conflict. The table lists for each data cycle the overlaps in each direction, the associated resolution maneuvers, and the commands to be given. Notice that a time t = 22.0 s, which is 33.9 s before the closest approach of the aircraft, commands are given to each aircraft. The command RTNL (right or no left turn) happens to be the same for both aircraft. This implies that either aircraft #1 is commanded to turn right (positive command) and aircraft #2 is commanded not to turn left (negative command), or vice versa.
Case Z-Potentiul Conflict: In this case, two aircraft are examined that have a miss distance (closest approach) greater than 5000 ft, the value of the threshold. Since the closest approach is greater than the threshold, the conflict is a potential conflict and only negative
commands, if necessary, will be given. The program will track the aircraft until they are diverging.
In this case, aircraft #1 has a range of 15 000 ft, an angle of 150", and is traveling with a velocity of 250 ft/s and a heading of 30'. Aircraft #2 has a range of 15000 ft and an angle of 0" and is traveling with a velocity of 250 ft/s and a heading of 160". The results of Case #2 are presented in Table 111. It can be seen that the miss distance (CLO APP) equals 9911.1 ft, thus making this conflict a potential conflict. Notice that at time t = 26.0 s, which is 34.1 s before the closest approach of the aircraft, negative commands are given to both aircraft. The command, NO R (no right) happens to be the same for both aircraft. At t = 50.0 s, which is 10.1 s before the closest approach of the aircraft, the commands are removed because a fictitious overlap exists for aircraft #l. Notice that the program continues until the aircraft are diverging.
X. CONCLUSION
This paper put forward a 2-Basic prediction algorithm for aircraft ground-based collision avoidance system; and examined the output of the computer program for two test cases. The program was executed

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. 21, NO. 4. JULYIAUGUST 1991
on a Macintosh +, and proved to be fast and easy to understand and implement.
ACKNOWLEDGMENT
The authors would like to express their sincere thanks to the Editor, Dr. Andrew P. Sage, and three referees for their exhaustive review and valuable comments and suggestions that were very helpful in improving this paper.
REFERENCES
Analysis, Flight Test & Evaluation of Honeywell, McDonnell-Douglas & RCA Airborne Collision Avoidance Systems (ACAS), U.S. Dept. Transport., FAA, Washington, DC, Rep. No. FAA-RD-76-17. M. A. Fischetti and T. S. Perry, “Our burdened skies,” IEEE Spectrum, vol. 23, no. 11, pp. 36-37, 1986. V. L. Golich, “Airline deregulation: economic boom or safety bust,” Transport. Quart., vol. 42, no. 2, pp. 159-179, 1988. W. H. Harmon and R. S. Kennedy, “TCAS I1 Design and Validation of the high-traffic-density surveillance subsystem, Project Rep. ATC 126,” Lincoln Lab, MIT Rep. No. DOT/FAA/PM084/5, Feb. 12, 1985. V. R. Hunt and A. Zellwegger, “Strategies for future air traffic control systems,” Computer, vol. 22, no. 2, pp. 19-32, 1987. V. R. Hunt and G. V. Kloster, “The FAA’s advanced automation program,” Computer, vol. 20, no. 2, pp. 14-17, 1987. T. G. Lombardo, “Collision-proof airspace,” IEEE Spectrum, vol. 17, no. 9, pp. 85-87, 1980. M. Mizumachi and T. Ohmura, “Separation and collision risk in air traffic control,” Electron. Commun. in Japan, vol. 60-B, no. 11, pp. 86-93, 1977. T. S. Perry and P. Wallich, “A matter of margins,” IEEE Spectrum, vol. 23, no. 11, pp. 38-50, 1986. A. Pool, “Historical development of collision risk models in en-route air traffic,” Int. J. Aviation Safety, vol. 1, no. 4, pp. 447-457, 1984. D.A Rossman and R. J. Kirchoff, “Ground based collision avoidance function for the 1980 air traffic control system,” IBM Corp., Fed. Syst. Div., 1980. “Summary user evaluation report on the traffic alert and collision avoidance system (TCAS 11) limited installation program,” Oct. 1988, Bendix/King Air Transport Avionics Division, Ft. Lauderdale, FL. H. M. Toong and A. Gupta, “Automating air-traffic control,” Technol. Rev., vol. 85, no. 3, pp. 41-54, 1984. T. Williamson and N. E. Spencer, “Development and operation of the traffic alert and collision avoidance System (TCAS),” Proc. IEEE, vol. 77, no. 11, 1989, pp. 1735-1744. L. B. Zarrelli, “Analysis of active BCAS alert rates and protection based on actual aircraft tracks,” MTR-80W267, The MITRE Corp., Feb. 1982.
Design and Implementation of a Fuzzy Controller for a High Performance Induction Motor Drive
Chang-Ming Liaw and Jin-Biau Wang
Abstract-A limit-cycle controlled induction motor drive with a fuzzy controller is designed and implemented. The torque and flux of the proposed drive system are regulated by the limit-cycle control technique. It follows that very quick torque response can be achieved. Since the dynamic model of this type of drive system is not easy to obtain, a
Manuscript received October 6, 1990; revised March 23, 1991. The authors are with the Department of Electrical Engineering, National
IEEE Log Number 9101210. Tsing Hua University, Hsinchu, 30043, Taiwan, R.O.C.
~
92 1
fuzzy controller is developed and used in the speed control feedback loop to obtain good dynamic rotor speed response. The fuzzy algorithms in the proposed controller are systematically found from the intuition and experience about the motor drive systems. The experimental results indicate that good dynamic speed performance can be achieved by the proposed controller. Moreover, since the rotor parameters are not needed in the implementation of the drive system, and due to the inherent feature of high adaptive capability possessed by the fuzzy controller, the performance of the controlled drive system is rather insensitive to the parameter and operating condition changes.
I. INTRODUCTION
Today, the field-oriented control method [ 11-[7] has made pos- sible the application of induction motor drives in high performance industrial applications where only dc motor drives were previously available. In a perfect field-oriented induction motor, the coupling between the d and q axes is eliminated, hence, high performance of drive can be obtained. However, the decoupling characteristic of the field-oriented induction motor drive depends on the motor parameter changes [l], [2 ] , [7]. Thus without applying more sophisticated con- trol techniques, such as, adaptive control, variable structure system control, robust control, etc., very good performance with parameter insensitive property still cannot be achieved.
In this paper, a quick response induction motor drive using a fuzzy controller is presented. In the proposed drive system, a ROM table [8] is used to select the prescribed optimal switching pattern for the PWM inverter. Selection of switching pattern is based on limit-cycle control technique, such that under the preset constant flux condition, a very fast torque response can be achieved with minimized switching frequency. Although this drive system has the novel feature of possessing very fast torque response, good dynamic speed response is not easy to achieve. The chief reason is that accurate dynamic drive model is difficult to obtain, and hence, the controller design based on mathematical derivation is quite difficult to perform. To overcome this difficulty, a speed controller based on the fuzzy control algorithms [9]-[ 131 is developed and implemented, such that good dynamic responses both in the speed following the regulation characteristics can be achieved. The fuzzy algorithms adopted in the proposed controller are systematically found according to intuition and experience about the motor drive systems. Having testing the effectiveness of the proposed fuzzy controller by computer simulation, the hardware of the drive system is implemented, and the software realization of the fuzzy control algorithms is carried out using a PC-386 personal computer. The experimental results indicate that good dynamic speed response can be achieved by the proposed controller. Moreover, since the rotor parameters are not needed in the implementation of the drive system, and due to the inherent feature of highly adaptive capability possessed by the fuzzy controller, the performance of the controlled drive system is quite robust and insensitive to the parameter and operating condition changes.
11. THE LIMIT CONTROLLED INDUCTION MOTOR DRIVE
The configuration of the power circuit used in the proposed drive system is shown in Fig. 1, which is composed of two sets of three- phase inverters, an open-delta connected induction motor, and a three serially connected inductor ( L O ) for reducing the zero phase sequence current in the motor. The input to the inverter is a fixed magnitude dc voltage E. If U,, t ’ b , and vc represent the line-to-he terminal motor voltages supplied by the inverter, the d - q voltage vector in
0018-9472/91$01.00 0 1991 IEEE