Y&B Design- The disgn of boats
66
UNIVERSITY OF STRATHCLYDE DEPARTMENT OF NAVAL ARCHITECTURE AND MARINE ENGINEERING NM305 Yacht and Power Craft Design Motor Boats Power Prediction and Waterjets Professor Osman Turan 20015
-
Upload
euclides-cagnini -
Category
Documents
-
view
10 -
download
1
description
A file that will teach you about Yacht and powercraft design.Inside you will find the procedure (basic) step by step to design you boat, including power requirements.
Transcript of Y&B Design- The disgn of boats
-
UNIVERSITY OF STRATHCLYDE
DEPARTMENT OF NAVAL ARCHITECTURE AND MARINE ENGINEERING
NM305
Yacht and Power Craft Design
Motor Boats Power Prediction and Waterjets
Professor Osman Turan
20015
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
2
1. POWER PREDICTION OF HIGH SPEED MONOHULL VESSELS
The main objective of this lecture is to provide preliminary algorithms to predict mainly the Effective
Horse Power of Fast Monohull vessels. Under this type, two different types of fast vessel will be
considered:
(i) Semi-displacement round bilge hulls and
(ii) Hard chine planing hulls. See Fig 1 for comparison of two types.
In this lecture we are going to concentrate on the power estimation of the former (i.e. semi-
displacement) hull types whilst the power prediction and other design aspects of the planing craft will be
presented in forthcoming lectures within more detail.
1.1 HULL DESCRIPTION
A semi-displacement hull is characterised by a hard-chine in the afterbody, by "spray rails" in the
forebody and by a "transom wedge". The planing hulls are mostly equipped with spray rails and trim
flaps. Because of the partially flat-like underwater sections of the former hull and fully flat underwater
sections of the latter hull, both types experience lift due to the action of dynamic forces. In the semi-
displacement round bilge hulls this is slight and these forces are fully exploited in the hard-chine planing
crafts.
For the semi-displacement hulls a spray rail, if fitted on each side of the forebody above the design draft,
will restrict the growth of the thin "bow wave", or sheet of water that develops with speed and allows the
hull, particularly if it is a full form, to run more clearly. The rails deflect the sheet of water and also
change the running trim of the hull and consequently affecting the vessel's resistance.
The size and positioning of the rail is not critical and it needed only extend half the length of the craft.
The underside of the rail should be fitted parallel to the water surface at rest. Fig 3 and 4 shows typical
arrangement and effectiveness of these rails.
The resistance of a high speed craft is importantly linked with its running trim () and the transom wedge is a simple device and, if properly selected, it will reduce both running trim and resistance. In Fig
5, a transom wedge arrangement and its effect on the residual resistance and running trim are shown.
Wedges appear to be most effective reducing the hull resistance at the hump speed region and the
effectiveness of a specific wedge depends upon the speed range.
Running trim reduces with increase of wedge angle -o
that negative can be obtained for large wedge
angles (e.g. 15o). Although hull resistance reduces at low but it would be acceptable to operate a ship
at high speed in this altitude to the sea. (See Fig 5).
1.2 RESISTANCE COMPONENTS
As the presence and magnitude of the resistance components depend upon the speed, in general, the
composition of the total resistance of the monohull vessels can be investigated in 3 speed regions which
are defined as follows:
Displacement mode FN 0.6
Semi-displacement (pre-planing) mode 0.6 FN 1.2
Planing mode FN 1.2
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
3
Note that the above region covers all mono-hull types. For the round bilge-type hulls it is not practical
to reach the planing mode because of the convex sections and buttock shape require excessive power in
addition the dynamic stability of the vessel in the planing mode becomes critical die to unsuitable hull
shape.
There are number of techniques available in the published literature to predict the resistance components
which can be categorised as follows:
Based on systematic hull series
Base on specific model tests
Based on semi-empirical (numerical) methods
Based on Analytical Methods
Because of the complexity of the prediction of the resistance, sometimes the above listed methodologies
can be even combined into a composite method to tackle this.
With regard to the above classification, two power prediction algorithm based upon the former two
categories (i.e. systematic hull series & specific model tests) are presented in the following section for
the semi-displacement round bilge hull vessels.
The power prediction based on these categories are more reliable and analytical methods. In these
algorithms, the total resistance components are identified for convenience.
1.3 POWER PREDICTION ALGORITHMS
In the following two algorithms are presented for the effective power prediction of the semi-
displacement round bilge hulls. The first algorithm is based on the "Systematic Hull Series" and the
other is based on the " Specific Model Tests" They are presented in general format so that they give the
student general guidelines how to identify the primary resistance components to calculate these
components by using systematic series and other means and finally to calculate the effective horse
power. In the presentation of the first algorithm appropriate comments on the available systematic series
will be made wherever appropriate.
ALGORITHM 1
TYPE Round Bilge Monohull
OPERATIONAL MODE Displacement, Semi-displacement
METHODOLOGY Systematic Hull Series (See NOTE 1) and other means.
STEP 1. Identify Primary Resistance Components
RH, RAP, RAA, RPAR, RAW, RST
RH is the hull drag, RAP the appendage drag, RAA the still air drag, RPAR the parasitic drag,
RAW the added resistance due to rippling seas, RST due to course keeping.
STEP 2 Calculate Hull Resistance (RH)
RH = ER FWSR FCH S s g
+ 0.5 s2 vs
2 SWH FWS FWCH (CF + ACF) cos (KN) (1)
with ER = RR = (2)
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
4
where ER is the residual drag RR - weight ratio to be obtained from the published model test series (eg
NPL Series [108], SSPA Series[107], Series 64 {106], series 63 [105], Marwood-Silverleaf
[104], de Groot Series [103] and Nordstrom Series [102] ). A brief review of these series is
given in NOTE - 1 at the end of this algorithm.
FWSR is the correction factor on ER due to spray rail and transom wedge and defined as follows:
RNPL
RWSR
WSRR
RF (3)
RR WSR is the residual resistance of the NPL series hull with spray rails and transom wedge.
RR NPL is the residual resistance of the NPL series.
FCH is the correction factor on ER due to the hard chine in the afterbody according to refs [8,
101]
RNPL
RCH
CHR
RF (4)
RRCH is the residual resistance of the NPL series with a hard chine length
LCH = 0.325 LWL
s is the displacement volume of full-scale vessel,
s is the seawater mass density at 15oC, s = 1.0258 t/m
3
g is the gravitational acceleration (g = 9.81 m/s2)
Vs is the ship forward speed
SWH is the wetted surface at rest without the immersed transom area and without
spray rails, transom wedge and hard chine.
FWS is the correction factor for the increase in the wetted area of the hull with spray
rails and transom wedge acc [8, 101]
WH
WHEWR
WSS
SF (5)
SWH EWR is the effective wetted area underway with spray rails and transom wedge.
FWCH is the correction factor for the increase in wetted area due to the hardchine in the
afterbody and defined as
WH
WHCH
WCHS
SF (6)
SWHCH is the wetted area of the hull at rest with a hard chine length LCH = 0.325 LWL (in most cases particularly in the concept design stage the wetted surface at test without the
immersed part of the transom is used. The effective wetted area underway, including the bottom
area, spray area and area of wetted sides, can become larger or smaller than at test, depending on
the speed and on the hull form. Except some cases, the effective wetted area must be determined
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
5
based on the model tests by visual and photographical observations of the model or by means of
electrical wetting probes.
CF is the flat plate friction coefficient which the same formulation should be adopted as was used in
the evaluation of the systematical model series. For example, for the 1957 ITTC line
210 2log
075.0
n
FR
C (7)
Where Rn is the Reynold number defined as
WL
n
VLR (8)
LWL is the waterline length, is the kinematic viscosity of salt water ( = 1.1883 x 10-6
m
2/sec at t = 15
oC)
CF is the roughness allowance to take into account the resistance increment due to structural shell
roughness (i.e. welding, waviness), fouling and paint roughness etc. Typical values of CF for various material as follows:
Hull Material CF x10-3
Steel painted 0.2~0.25
Aluminum 0.1
Planked wooden hull 0.2
Plywood painted 0.1
Plywood covered with epoxy resin 0
Coppered wooden hull 0
GRP 0
is the change of running trim against trim at rest.
STEP 3 Calculate Appendage Drag ( RAP)
In this mode it is expected to be less than 10% of the total resistance, therefore it may be neglected.
However, if it is preferred the sub-components: skin-friction, profile drag, interference drag, spray drag
and ventilation drag are summed to present the total appendage drag based on the provided drag
coefficients in refs [10,16,30]. Most of the drag of each appendage arises normally from the viscous
component and therefore, is determined based upon a certain non-dimensional drag coefficient, upon
several characteristic dimensions of the appendage, upon the speed and direction of the water. The main
formulae reported by Hadler [16] for preliminary analysis as follows:
Central Keel and Skeg Drag DK
Dk = 1/2 s (2Sk) Vs2 Cf (9)
Where 2Sk is the wetted surface area of both sides of keel, Cf is the frictional drag
coefficient based on wetted length of skeg. (eg; eg 7 can be used. For Rn in eg 8, LWL
will be replaced with the length of the keel or skeg in the direction of the flow)
Although the drag equation for skeg is given here, it is usually an integral part of the
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
6
hull; thus it is appropriately part of the bare hull drag estimate when making design
calculations.
Rudder and Struts drag Dr or Dst Hoerner [10] gives a formula for aerofoil sections which is in good agreement with measured resistances obtained for rudders and struts of
NACA sections. Hence:
Dr or Dst = 1/2 s (2Sr) Vs2 [2c + (1+2t/c+ 60 (t/c)
4] (10)
where
Sr or Sst is the planform area of rudder or strut as seen from one side, t/c is section thickness-chord ratio
and other symbols as for e.g.(9)
Spray Drag, Drsp or Dstsp
In the event that the rudder or strut penetrates the water surface, spray will be produced.
This spray formation represents an increment of drag which is given by
Drsp or Dstsp = (0.24) s Vs2 tww
22 (11)
where tw is the maximum rudder thickness at water surface (note it is in feet!)
Interference Drag, D
D = Vs2 t
2 [0.75 (t/c) 0.0003/(t/c)2] (12)
where t/c is the section thickness-chord ratio.
The interference effects which are most pronounced are the rudder and the strut. The
small drag interference between strut barrel and strut may usually be ignored.
Propeller Shafting and Strut Barrel Drag, Dsh
These appendages are subject to cross flow conditions and again Hoerner gives :
Dsh = 1/2 s l d Vs2 (1.1 sin
3 + Cf) (13)
for 103 Rn = Vd/ 0.5 x 10
3
where l is the total length of shaft and bossing, d is the diameter of shaft and bussing, E
is angle of flow striking the appendage (the flow is assumed parallel to the underside of
hull) and Cf is the frictional drag coefficient based upon the local Rn.
Bilge Keels, Db
Db = 1.67 (1/2 s SB VS 2
C f) (14)
where SB is the total wetted surface of bilge keels less area of ships hull masked by the keels and other symbols as before.
The resistance of all the hull appendages will be the sum of the individual items.
STEP 4. Calculate Still Air Drag, RAA
The air and wind resistance of a fast patrol craft can approximate to 1-% of the total
resistance. The resistance of each element which is exposed to the wind can be
calculated by means of Hoerners formula, i.e.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
7
RAA = A (VS VAA)2
A V CAA (15)
where
PA is the air mass density, VAA is the velocity of wind relative to ground, AV is the area
exposed to the wind, CAA is the wind resistance coefficient.
The value of CAA changes with the wind direction of the approaching wind and direction
of motion of = 20~ 30
The wind resistance coefficients can be found in ref[109]
e.g. for fast patrol crafts : 0.62 0.83
for Corvettes 0.58 0.66
STEP 5. Calculate Parasitic Drag, R PAR
The resistance of protruding exhaust vents, cooling and sanitary water and outlet
openings scoops and zinc anodes etc can be calculated by Hoerners formula which is applied for each item as follows:
R PAR = s U 2
C DP A P (16)
where U is the velocity in the boundary layer at the distance y from the hull given by
7/1
xs
y
V
U
(17)
with x being the boundary layer thickness given as
5/1
37.0nx
xR
x for 5.104 Rnx10
6
6/122.0
nx
xR
x for 106 Rnx10
8
where x is the distance from the intersection of the stem with the waterline to the
position of the appendage element Rnx is the Reynolds number.
CDP is the specific drag coefficient and its value varies from 0.1 0.4 depending upon the type, shape and fairing of the obstacle. Relative values are given by Hoerner. For
zinc anodes, sanitary water inlet and outlet opening flanges a mean value of CDP = 0.15 0.2 is acceptable.
Ap is the frontal area of the obstacle.
STEP 6. Calculate Added Resistance due to waves (rippling sea), RAW
This can be approximated, based on ref [8], as follows :
RAW = 0.02 RH (18)
STEP 7. Calculate Drag Due to Course keeping, R ST
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
8
An approximation can be made as follows :
RST = 0.02 (RH + RAP) (19)
STEP 8. Calculate Total Resistance, RT
RT = RH + (Dk + Dr +Dst+ Drsp + D + Dsh + DB) + RAA +RPAR + RRAW + RST
STEP 9. Calculate Effective Power, PE
PE = RT VS (20)
1.4 NOTES ASSOCIATED WITH ALGORITHM 1
1. Algorithm 1 makes use of the results of systematic hull series data. More than in the case of the
other types of high speed marine vehicles, the results of systematic round bilge hull series have
been published. The name of the well-known series and the references which contain the
available data is as follows : Nordstrom Series [102]; de Groot Series [1:103]; Marwood-
Silverleaf Series [104]; Series 63 [105, 103]; Series 64 [106]; SSPA Series [107] and NPL
Series [108].
A brief review of these series can be found in WEGEMT 89 Proceedings by Muller-Graf [8]. The following is re-statement of this review:
Nordstrom Series : This small series, published in 1936 [102], was tested without turbulence
stimulators, sprayrails and transom wedge. The drag-weight ratios (i.e. ER = RR/ ) of the
residual resistance are presented for the large length-displacement ratios (i.e. LWL/1/3) of 5.6 to 7.75 by Oossanen [103].
De Groot Series : The residual resistance coefficients (CR = RR/(/PV2SW)) of 31 models tested
without efficient spray rails in ref [131]. The more practical drag-weight ratio type of
presentation is given by Oossanen [103]. The results of the de-Groot series are affected : (i) by
using an averaged welted area at rest
SW = 2.75 WLL and not the specific one (ii) by applying a horizontal towing force at the deck
of the model which decreases running trim and resistance at all speeds.
Marwood Silverleaf Series : The resistance data of 30 unrelated round bilge hulls are published in 1960 in [104] by the form of the specific resistance coefficient =
(PE.427)/(V22/3) of a 100 ft standard vessel. Due to the impracticable presentation of the
resistance data of obsolete hull forms which are characterised by an enormous spray generation,
this series no longer suited for the power prediction of modern semi-displacement hulls.
Series 63 : The resistance data of 5 models of a more modern twin-screw round bilge hull
form for a 15.2m utility boot were reported in 1963 by Beys from Stevens Inst Tech [105]. A
presentation of the residual resistance in form of Drag-weight ratio is given by Oossanen [103].
Series 64 : The results of this series, related to 27 slender round bilge hull forms without
spray rails, have been published in 1965 [106]. For high speed marine vehicles with
displacements 500m3 and the length to beam ratios of 8.54 to 18.26 which are impracticably high. They will lead at speeds Fn>0.8 to 2 high resistance, to a distinct loss in dynamic
transversal stability and to an enormous development of spray which causes a very wet day and
reduced visibility from the bridge.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
9
SSPA Series : The residual drag-weight ratios of this series, characterised by large
length-displacement ratios LWL/ 31
= 6, 7, 8 and length to beam ratios of LWL/BWL = 4.6 8.0
are given in ref [107] for speeds according to the Froude number related to the displacement
volume (i.e. F = V/ 31g ) from 1.0 to 2.0. The residual resistance is affected by the drag of
ineffective spray rails because their inclination in the direction of motion was chosen too small.
In addition, the horizontal towing force, applied at the deck and not in line with the thrust axis
resulted in error in the resistance measurement due to an uncommon low running trim.
NPL-Series : The most useful resistance data on high-speed semi-displacement round bilge
hulls have been published by Bailey [108] in 1976 for a series of 22 models with the length to
beam ratios LWL/BWL = 3.33; 4.55; 5.41; 6.25; 7.5 and the length to displacement ratios
LWL/1/3
= 4.47 to 8.3 for speeds Fn = 0.5 to 2.8. The residual resistance is determined with the wetted surface at rest which can easily be calculated by means of a diagram included. In
addition, propulsion, manoeuvering, stability underway and seakeeping data were presented for
these series in ref [108] (See Fig. 6 through Fig. 9 for the NPL Series and parent model details].
1.5 ALGORITHM-2
TYPE : Round Bilge / Hardchine Monohull
OPERATIONAL MODE : Displacement, Semi-displacement
METHODOLOGY : Specific Resistance test
STEP 1 Identify Primary Resistance Components
RTM, RAP, RAA, RPAR, RAW, RST. where RTM is the total resistance of the model excluding the remaining five
components. If the model is tested with appendages RTM includes ZRAP
of the model (i.e. RAPM) and excludes the remaining four components.
STEP 2. Estimate the Resistance Components & Friction Deduction
RTM is to be obtained from a specific model test.
Because of the low Reynolds numbers at the model scale, the frictional resistance contribution in RTM is usually great in the model scale relative to the full scale.
Therefore a friction deduction factor FD is usually applied. This is given by
FD = [ CFM ( CFS + CF ) ] 2
M VM2 SWHEM (21)
where
CFM is the frictional coefficient of the model which can be calculated
from ITTC Line (e.g. 7).
CFS is the frictional coefficient of the ship which can be calculated as
above in the ship dimensions.
VM is the model speed, M is the mass density of fresh water
SWHEM is the effective wetted area of the model underway.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
10
If the model speed becomes VM 6.0 m/s, the frictional deduction has to be increased by the aerodynamic drag of the model, i.e.
FD = [ CFM ( CFS + CF ) ] 2
M VM2 SWHEM + RAAM (22)
where
RAAM is the aerodynamic drag of the model being the difference of the resistance of the
model towed without and behind a wind screen.
The above defined Rn effect correction on the frictional resistance applies when the
model tested without appendages to save costs. If the model tested with appendages, the
frictional resistance even more increases due to the low Rn of the model appendages as
well as the additional resistance due to laminar separation. For this reason it has been
well proven to scale up only 60% of the model appendage drag which is obtained as the
difference of the resistance of the model hull with and without appendages at the same
speed and same running trim. Therefore, the following frictional deduction has to be
applied if the appendages exist
FDAP = [ CFM ( CFS + CF ) ] 2
M VM2 SWHEM + KAP RAPM (23)
where
RAPM is the appendage drag of the model,
KAP is the reduction factor to compensate the scale effects of the appendage drag. Acc
ref [8, 111, 112] KAP varies with Rn of the appendages from 0 4 to 0.6. A well proven
value is KAP = 0.4.
Similar to the previous case, if the model speed becomes larger than VM=6.0 m/s the
aerodynamic drag of the model has to be added to the frictional deduction i.e.
FDAP = [ CFM ( CFS + CF ) ] 2
M VM2 SWHEM + KAP RAPM + RAAM (24)
If Model is tested with no appendages RAP see e.q. 9 through 14 RAA see e.q. 15
RAW see e.q. 18
RST see e.q. 19
STEP 3 Calculate Total Resistance
By considering whether appendages are included or not in the tests, the total resistance
of the vessel in full scale as follows:
In the presence of no appendage test results:
RTS = STAWPARPARAAAPDTMM
S RRRRRRFR )(3
(25)
In the presence of appendage test results
RTS = m
s
RSTAWPARAAAPDTM
RRRFR )(3 (26)
where is the ship to model scale factor.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
11
STEP 4 Calculate Effective Power Required
PE = RTS VS (27)
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
12
1.6 FACTORS AFFECTING THE RESISTANCE CHARACTERISTICS OF ROUND-
BILGE HULLS
In the following general statements are given on the effect of the important hull parameters
for design guidance. These are based on the analysis of some model test results and their
general nature should be kept in mind.
Block Coefficient : In general, as CB increases, the hull resistance increases for
the similar dimensions of ship, in particular for small froude numbers. As the fn increases the
rate of increase in the resistance gets relatively small. Therefore, perhaps, in the early
(concept) design stage the effect of CB at high Fn range can be neglected. There is no strict
rule that the vessel with the smallest CB will present the minimum resistance. Fig. 21 shows
the effect CB on the residual resistance of a round-bilge hull with B/T = 4 [132]. As can be
seen in this Fig., for V/ L (Knot/ feet ) > 2 the best region appears to be CB= 0.40 ~ 0.45.
Beam-to-Draft Ratio : In general, similar to the normal displacement ships, as B/T
increases, the resistance increases. Therefore, for the early concept studies this variation can
be assumed Linear. However as B/T takes near max values, this linearity disappears.
Length-to-Displacement Ratio : The analysis of the model test studies indicates that;
for the same speed of models, as L/1/3 increases the resistance of the models decreases indicating a Linear-like trend. In fig. 22 this trend is shown for 2.25m of round-bilge model for two different B/T values.
Longitudinal Centre of Buoyancy : As the LCB shifts towards to the aft from the
mid-ship, the resistance reduces. In Fig. 23 these effects are clearly shown. Because of their
higher speed relative to the single screws, the twin-screw round-bilge hulls require an
additional 1% ~ 1.5% of the shiftment of the LCB towards the aft in comparison to the single-
screws. Kafali [132] gives the following formula for the location of LCB of the single screws
:
100 x WLL
LCB= 3
3 825.0WLL
V (
Aft
Fore)
Effect of Trim : The experiences with model tests indicate that a trim in any direction
(i.e. fore or aft) has an unfavourable effect on the resistance. This effect is similar to the
effect of a non-optimum LCB position on the resistance. In fig. 24, the variation of the total
resistance of a round-bilge bilge hull model for varying trim angles is presented. It can be
seen that except the case of 1% trim to the above, the remaining case presents unfavourable
resistance in comparison to the level trim case.
Appendages : The effect of the appendages on the resistor of a typical round-bilge
hull vary between 2-15% of the total resistance. For V/ WLL > 1.5, the ratio of the
appendage drag to the bare hull drag can be approximated to a constant value of 10%.
Therefore, for concept studies 10% increase in the bare hull resistance can be assumed. As
the design stage progresses, the effect of the appendages should be calculated individually, as
presented earlier, or it should be obtained from the model tests.
Spray Rails : We have already discussed the effect of the spray rails in section 8.1.
The hydrodynamic lift forces of the spray rails counteract the trimming by bow and contribute
to the emergence of the hull which reduces the resistance components RWP, RP, RF.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
13
Additionally the spray rails diminish the spray wetted area considerably. Spray rails in the
forebody and hard chine in the after body are imperative to compensate the loss of dynamic
stability at speeds Fn>0.8 for L/B > 6.25.
Transom Wedge & Flaps : Similar to the spray rails, the lift developed by the
wedges or flaps are considered to be effective. In fig. 25 and 26, the effect of the wedge and
flaps on the power and trim angles of various round-bilge hull vessels are presented.
1.7: PROPULSIVE POWER PREDICTION
For a preliminary design situation a speed power estimate can be made by means of the propulsive
efficiency which is chosen from a similar prototype. The delivered power at propeller is given by:
D
ED
PP
,
PE = RT Vs,
T = RT /(1-t) , Where PE the effective power, PD is delivered power at propeller, RT the hull resistance, Vs the vessel speed, T the thrust produced by propellers, t the thrust deduction fraction Propulsive efficiency or Quasi Propulsive Efficiency;
D = 0 HR 0 is open water efficiency, H is hull efficiency, R is relative rotative efficiency
o
BR
,
w
tH
1
1 R = B/0,
Qn
VT AB
2
)( , Q is propeller Torque and n is the rate
of propeller revolutions. Shaft power or brake power is given by
M
DB
PP
, where M is the mechanical efficiency, 0.98 for the shaft and 0.96 for shaft and
gear box.
RRoM
EB
PP
,
OPC
PP EB
OPC is the overall propulsive efficiency or T
where R is generally = 1.0 OPC is around .0.6-0.74 depending on the type of propulsion system and the hull.
TYPE OPC
Propeller with inclined shaft 0.64-0.65
Propeller with afterbody tunnel 0.7-0.74
z-drive 0.68-0.7
Waterjet propulsion 0.62-0.64
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
14
1.8 CONCLUDING REMARKS
In these lecture notes we present general design features of round bilge hull from the
resistance point of view and two practical methods (i.e. systematic Series and semi-empirical
and Specific Model test method) to estimate the total resistance and consequently Effective
Power. These two methods appear to be more reliable and more popular compared to the
others (e.g. Numerical methods based on Regression Analysis [113, 133] and analytical
methods). A comprehensive review of these methods and other design aspects of the fast
mono-hulls can be found in WEGEMT 89 Proceedings [8]. Therefore the students can refer
to this source for further info.
In the main text we have presented two effective power prediction algorithms. These
algorithms are general in nature. In applying these algorithms are general in nature. In
applying these algorithms for a specific series or model test results there may be some
irregularities and these should be borne in mind. In either case, further refs in association
with that particular series or scaling up procedure for the particular model testing tank should
be consulted.
Although its beyond the scope of this course a limited data on the propulsion characteristics
and procedure for the propeller design of the NPL series has been included in the
APPENDIX.
Once again for the further information on the above hydro-dynamic aspects WEGEMT-89 and
98 proceedings can be consulted.
1.9 REFERENCES
A long list of references and bibliography is given as separate Handout. Therefore the students will
refer to that list for the cited references of these lecture notes. Additional refs are given in the
following with follow up numbers of that list.
[131] De GROOT, D. Resistance and Propulsion of Motorboats ISP Vol 2, No. 6, 1955, P61-80
[132] KAFALI, K. Yksek Sratli Tekneler (High Speed Hulls) Istanbul Technical University Publications, 1981 (In Turkish)
[133] HOLTROP, J. A Statistical Re-Analysis of Resistance and Propulsion Data, ISP Nov.1984 [ ] FUNG, S.C. Resistance Predictions and Parametric Studies for High- Speed Displacement Hulls, Naval Engineers Journal, March 1987
APPENDIX - WORKED EXAMPLE FOR DESIGN AND POWER PREDICTION OF
A 38M HIGH-SPEED ROUND BILGE SEMI-DISPLACEMENT
MONO-HULL.
In the following a worked example for a 38m round bilge hull is presented based on the NPL
Series as taken from ref [108]. The example is to illustrate how to estimate the Effective
Power based on these series. However, additional information also provided in terms of other
aspects including the estimation of the main dimensions and Shaft Power required etc.
The following is the content list of this example.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
15
1. Design of Hull (i.e. Estimation of Main Dimensions & Hull Offset).
2. Effective Power Prediction
3. Running Trim Estimation
4. Rise/Fall of Hull at the LCG
5. Effect of Hull Roughness
6. Effect of Change of LCB
7. Appendage Drag
8. Estimation of Power required at Ships Propeller
1. DESIGN OF A 38M HIGH-SPEED ROUND BILGE DISPLACEMENT MONO-HULL
By using NPL High Speed Round Bilge Displacement Hull Series, a 38m with a displacement of 190
tonnes will be designed for 30 knots speed. The main characteristics of the vessel are summarised as
follows:
LOA (length overall) = 38 m
LWL (length on designed WL) = 35m
(Displacement Mass) = 190 tonnes (in salt water at 15C) V (Design Speed) = 30 Knots = 30 x 0.5148 = 15.44 m/sec
(Displacement Volume) =
025.1
190 185.37m3
The volumetric Froude No.: F = 3/1g
V=
6/12/1 )37.185(
1
)81.9(
44.15= 2.064
The Froude Length Constant (M) = 3/1
WLL = 3/1)37.185(
356.14
We prefer a vessel with minimum resistance which decreases with beam. Therefore assuming the
lowest practical figure (i.e. L/B for NPL series vary between 3.33 ~ 7.5) of 6m
L/B = 6
35 = 5.83
The block coefficient will be that of the NPL Series, 0.397 and for the displacement required, than
draft can be found as follows:
CB = LBT
=
T635
37.185= 0.397 T = 2.223M
The summary of the principal dimensions of the design becomes:
LWL = 35M
B = 6M
T = 2.223M
= 190 tonnes CB = 0.397 (assumed same as the NPL series)
LCB = 6.4% aft amidships (assumed same as the NPL series)
(M) = 6.14
F = 2.064 (at V = 30 knots)
Depending upon the above characteristics the hull offsets can be derived from the parent hull of the
series given in Fig. 8. In order to do that the scale factor () is calculated based on the length of the parent model and our design. (The parent model length of NPL series is 2.54m)
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
16
i.e. = )(
)(
WL
WL
L
L
design
parent=
35
54.2= 0.07257
The dimensions of our design in the scale of the parent model:
L = 2.54m (kept same as the parent hull)
B = 6 x 0.07257
T = 2.223 x 0.07257 = 0.16132m
The offsets and waterline heights can now be calculated from the parent model given in Fig. 8, by
defining appropriate ratios for the waterline heights and offsets as follows:
Waterline ratio = 14.0
16132.0 = 1.1523 (where 0.14 is the draft of the NPL parent model)
Offset ratio = 4064.0
4354.0= 1.0714
(where 0.4064m is the beam on DWL of the NPL parent model)
Using the above ratios we arrive, for example at WL 5 & 6 and at STN2, the following values
MODEL SCALE (L = 2.54m) FULL SCALE (L = 35m)
WATERLINE HEIGHT OFFSET AT STN 2 SHIP DIMENSIONS AT STN 2
NPL
PARENT
OUR
MODEL
DESIGN
NPL
PARENT
OUR MODEL
DESIGN
WATERLINE
HEIGHT
OFFSET
50mm 50x1.1523 =
57.62mm
22.4mm 22.4x1.0714 =
24mm
57.62 / 0.07257
= 794.mm
24 / 0.07257
= 330.7mm
60mm 60x1.1523=
69.139mm
62.9mm 62.9 x1.0714 =
67.39mm
69.139/0.07257
= 952.72mm
67.39/0.07257 =
928.62mm
Similar to the above example, all WL height and offset values can be obtained from Fig.
8.
The height of the underside of hull at the centreline above the base for each station can be calculated
from Fig. 9.
Having obtained the underwater hull form, we can add any reasonable deck line and freeboard above
the DWL.
Depending upon the information obtained so far we can draw the lines plan of our design. If we
encounter problems such as finding sufficient space for the accommodation of engines, etc. we can
modify some hull sections which result in a different LCB position. This process should be done by
using conventional area curves and the final LCB position should be noted.
2. EFFECTIVE POWER ESTIMATION
Let us estimate the effective power of the earlier designed boat at 30 knots of speed.
Effective power, PE is given by
PE = RT V = (RF + RR) V
where
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
17
RT is the total resistance, RF the frictional resistance, RR the residual resistance and V the
speed.
The frictional resistance, RF is calculated from the 1957 ITTC formulation as follows
CF = 210 )2(log
075.0
NR (1)
Where RN is the Reynolds number which is calculated as follows
RN = 61018831.1
35)5148.030(
X
XXVL
= 4.542X10
8
(See Table for kinematic viscosity values ()
From e.g. (1) it follows
CF = 2810 ]2)10542.4([
075.0
xLog= 0.00169
By definition
CF = 22
1 gAV
RF (2)
where g is the mass density of the salt water at 15C (1025.9kg/m3), A is the wetted area of the
hull at rest, V is the ship speed.
The wetted area of the ship at rest can be calculated by the following formula based upon the
Fig. 10, i.e.
A = 10
163.1fromfig
X (54.2
L)
2 = 1.163 X (
54.2
35)
2 = 220.82m
2
By substituting the appropriate values in e.g. (2)
RF = 0.00169 X 2
1 X 1025.9 X 220.82 X (30 X 0.5148)
2 = 45658 kg
2S
m
RF = 45.658 KN
The residual resistance, RR is estimated from RR/ vs (M) charts. The relevant charts are presented in figs 11 and 12 for the design values of L/B = 5.83,
F = 2.064 and (M) = 6.14.
From Fig. 11, for L/B = 5.41 RR/ = 0.664 Ton
kNat F = 2.064 &
(M) = 6.14
From Fig. 12, for L/B = 6.25 RR/ = 0.627 Ton
kNat F = 2.064 &
(M) = 6.14
From the above two pair of values, by interpolation,
for L/B = 5.83 RR/ = 0.664
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
18
Therefore RR = X 0.644 = 190 Ton X 0.644 Ton
kN
RR = 122.4KN
The total Ship resistance at 30 knots is thus,
RT = RFTRR = 45.658 + 122.4
RT = 168.058 KN
The effective horse power PE,
PE = RT V = 168.058 KN X (30 X 0.5148 m/sec)
PE = 2595.48 KNM/sec
PE = 2595.48 (KW)
3 RUNNING TRIM ESTIMATION
The running trim of the NPL series is presented by appropriate charts as
(running trim) vs F for varying (M)s.
For our design, the associated charts are included in Fig 13 and 14. From these figures for L/B
= 5.83, F = 2.064 and (m) = 6.14, the running trim by stern at 30 knots will be approx :
2.6
4. RISE OR FALL OF HULL AT LCG
The rise or fall of the hull at its LCG for the NPL series is presented by appropriate charts as
WLL
fallORrise vs F for varying (M)s at different L/Bs
For our design, the required value of the rise/fall of the LCG can be found from Fig. 15 and Fig.
16, for L/B = 5,83, F = 2.064 and (M) = 6.14 by interpolation as follows
WLL
FALLorRISEX 100 = 0.05
Therefore the hull will RISE = 0.05 x 35/100 = 0.0175m at its LCG.
In the above example we performed the calculations at 30 knots. In design process these
calculations (i.e. Power, running trim and rise) are performed over a chosen range of ship speed
as much as the chart range allows
5. EFFECT OF HULL ROUGHNESS
In the prediction of the frictional resistance, the CF value is calculated as 0.00+69 and this value
is related to a perfectly smooth hull surface. If the hull surface is expected to be abnormally
rough then this value is increased and CF of say 0.5 X 10-3
so CF value becomes
CF = 0.00169 + 0.5 X 10-3
= 2.19 X 10-3
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
19
6. EFFECT OF CHANGE OF LCB
As stated earlier, when arriving at the final hull shape if the position of the LCB is different to
that of the model test series, then these are auxiliary charts for the correction. These graphs are
presented %increase in (RR/ vs LCB POSITION) for varying (M) and F values at different
L/Bs. In Fig. 17 typical examples of these charts for F = 2.0 is shown.
A small change in LCB will not affect the wetted surface, but if the LCB change is large then
an independent calculation of the hull wetted surface should be made and included in the
calculation of CF.
7. APPENDAGE DRAG ESTIMATION
In model tests the resistance of hull appendages such as propeller shafting and brackets can be
measured and expressed as a percentage of the bare hull resistance. However, these
percentages cannot be successfully applied to any design and if model data are not available
then the resistance of the individual appendages for a specific ship design are best calculated by
the formulae given in the main text of these lecture notes.
8. ESTIMATION OF POWER REQUIRED AT SHIPs PROPELLER
The total shaft power for a given ship speed is
Shaft Power QPC
PP ES (3)
For a ship driven by marine propellers the QPC is made up as follows
QPC = PXX
orrhO
)1()1(
(4)
where, rrho and ,, are the open water, hull and relative rotative efficiency respectively.
(1+x) is a propulsion prediction factor. P = rrh
For the NPL series, for a very limited range of vessel displacements, the propulsive factor, P,
values are presented by charts as (P vs FN) for varying (M) values. In Fig. 18 a typical example
is given. Note that in these figure FN =
WLgL
V and for our design at 30 knots.
FN = 3581.9
5148.030
x
x = 0.833
It is necessary to introduce (1+x) into predictions, to take into account of differences between
actual ship power and predicted from a corresponding model tests. The appropriate chart for
this purpose is also presented for the NPL series as shown in Fig 19 , as (1+x) vs F for a
limited range of varying ship waterlengths (LWL).
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
20
In order to estimate the Ps and the engine power, initially we assume QPC = 0.5 and calculate
Ps from e.g. (3). From Ps we can select an engine and calculate the propeller torque to be
absorbed at the particular ship speed calculated. The blade area of the propeller is selected
using a safe blade loading of, for example, 0.7 kg.f/cm2, and conventional propeller design
charts used to determine the best combination of propeller diameter and pitch which will match
the characteristic of the engine. The process is iterative over a range of propeller diameter and
an optimum o is ultimately determined. QPC is then calculated through e.g. (4) where values
for P and (1+x) are obtained from fig. 18 and fig. 19. If QPC differs significantly from 0.5, the
value takes initially, then the whole calculation is repeated beginning with the new QPC until
equality is achieved, and an accurate value for Ps obtained.
Further Notes
1. The Gawn propeller data are preferred in the case of high speed craft which do not demand
extreme loading or rotational speeds. Gawn used relatively large propeller models which help
to reduce scale effect and his data cover blade area ratios upto 1.1, these higher values being
inevitably required to minimise propeller cavitation.
2. Once a propeller has been selected a cavitation check should be made using the Gawn and
Burrill data and if the indicated degree of cavitation is severe, an increase in propeller area will
help but the calculation process has to be repeated to provide a final o.
3. For the same reasons for the propulsion prediction factor (1+x), a propeller revolutions
prediction factor, K2, is needed in determining ship propeller rotation, Ns, which is
NS = NM X K2
where
Nm is the ship propeller rotation equivalent to model rate of rotation, values for K2 are given
in Fig. 20 for the NPL series.
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
21
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
22
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
23
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
24
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
25
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
26
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
27
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
28
-
NM305 Yacht and Powercraft Design Power Prediction of Semi displacement Boats
29
-
NM305 Yacht and Powercraft Design waterjets
1
-
NM305 Yacht and Powercraft Design waterjets
2
-
NM305 Yacht and Powercraft Design waterjets
3
-
NM305 Yacht and Powercraft Design waterjets
4
-
NM305 Yacht and Powercraft Design waterjets
5
-
NM305 Yacht and Powercraft Design waterjets
6
-
NM305 Yacht and Powercraft Design waterjets
7
-
NM305 Yacht and Powercraft Design waterjets
8
-
NM305 Yacht and Powercraft Design waterjets
9
-
NM305 Yacht and Powercraft Design waterjets
10
-
NM305 Yacht and Powercraft Design waterjets
11
-
NM305 Yacht and Powercraft Design waterjets
12
-
NM305 Yacht and Powercraft Design waterjets
13
-
NM305 Yacht and Powercraft Design waterjets
14
HIGH SPEED CRAFT
Osman Turan
Lecture Notes on
MARINE WATERJET PROPULSION
-
NM305 Yacht and Powercraft Design waterjets
1
GENERAL FEATURES AND MAIN COMPONENTS
The basic operating principle of waterjet propulsion system is similar to that of a propeller i.e.
the thrust is produced by the momentum of water mass accelerated by an externally driven
high speed impeller of relatively small diameter in a long channel (i.e. pump).
Water is fed into this inboard pump from the inlet of the channel. The pump increases the
pressure of the passing water and this pressure is then turned into velocity when the water
discharged into the air through a smaller diameter outlet Nozzle in the astern directions. The
outlet nozzles are usually mounted in the transom of a ship hull.
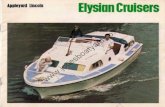
A typical waterjet system therefore comprises of an INLET CHANNEL, an IMPELLER,
GUIDVANES to direct the flow to the impeller, an OUTLET NOZZLE, STEERING
DEFLECTORS and REVERSING BUCKETS. (See following figure).
Steering is achieved by deflection of the jet system with the buckets which can be controlled
by a hydraulic system. A maximum deflection of 30 can be achieved. Reversing can be
provided by the reversing buckets which deflect the jet stream forward to generate astern
thrust. There is a DEBRIS GRILL fitted at opening of the inlet to stop any possibly harmful
objects entering the waterjet and hence damaging it.
Only recent years waterjet propulsion system has gained acceptance and challenged the screw
propeller, particularly to screw propeller, due to the introduction of more efficient pumps,
increase in demand for higher speed and operability in shallow waters.
The W/J is more complex propulsion system than conventional screw propulsion system due
to greater number of sub-components including pump, outlet nozzle, thrust vectoring and
reversing mechanisms and ducting.
It has been claimed that the efficiency of waterjet propulsion is getting closer to the efficiency
of the open screw propulsion system. This is not entirely true. The W/J has inherently lower
efficiency than the waterborne propellers. High pump efficiencies (e.g. 90%) can be obtained
but this does not mean overall efficiency which depends on configuration of duct inlet and
outlet nozzle associated losses.
-
NM305 Yacht and Powercraft Design waterjets
2
-
NM305 Yacht and Powercraft Design waterjets
3
ADVANTAGES AND DISADVANTAGES OF WATERJETS
Advantages
Small draft requirement (depending on hull types)
No requirement for appendages (e.g. rudder, shaft, brackets etc) and hence absence of
appendage drag
Excellent steering and stopping capability (i.e. reduced stopping distance)
No reversing gear requirement
Isolation of impeller from main flow of the water passed the ship provides smooth loading
on engines (i.e. no over torque or revving)
favorable fuel consumption for high speed cruise
low noise and vibration
reduced signature in naval applications
no docking requirements for installation and maintenance.
less reduction gearing requirements and hence reduced weight in some cases.
Disadvantages
The efficiency of the system can be lower than that of the waterborne screw propeller due
to the internal losses.
Problems can arise due to separation of flow on the upstream and downstream surface of
the inlets at high and low speeds respectively.
Cavitation can be observed on the inlets which causes erosion and vibration
Air ingestion may occur especially when the hull is operating in rough seas. This results in
a loss of power and speed and damages on pumps, engines and gear boxes due to unsteady
effects.
W/J increases the virtual length of a craft. It is not suitable for vessels line tugs to push
objects by stern.
The prediction of the overall propulsive coefficient of a craft with W/J needs a careful
consideration of the efficiency of numerous components
The determination of the efficiency of each component is very complex and expensive.
Some of the components have to be tested in tanks (hull-jet interaction coeffs) and others
in cavitation tunnels (flow rate, volumetric inlet velocity, shaft power etc). The data are
affected by the scale effects. Therefore the power has to be predicted by the W/J
manufacturer.
Ducting must be customised to particular craft
-
NM305 Yacht and Powercraft Design waterjets
4
CHARACTERISTICS OF WATERJETS
Inlets
Waterjet inlets can be divided into two main category.
* Pod inlets
* Flush inlets
Pod inlets are preferred for hydrofoils while the flush types are used on all other crafts
including conventional monohulls, planing crafts, catamarans, SES etc
Theoretically, optimum inlet should be designed to match the required flow at the craft design
speed and power. At this condition the inlet has the optimum inlet velocity ratio and is entirely
free from cavitation risk. In practice, satisfactory inlet performance can be obtained over a
wide range of inlet velocity ratio and craft with fixed area inlets.
An inlet should provide a low level of distortion of the pump impeller face since this will
provide higher values of relative rotative efficiency R. Hydrofoil with pod inlets have the
most severe flow-turning problems. Although the flush inlets may have lower draft, it may be
susceptible to air ingestion in seaway.
Depending upon I.V.R. (Inlet velocity ration ShipSpeed
tyatinletFlowVeloci
V
V
s
i ) is too high or too low
internal or ship speed external cavitation may occur on a pod inlet as shown in figure on the
next page.
On a flush inlet cavitation may develop at outside or inside the inlet similar to the pod inlet.
Because of the above reasons variable geometry inlet may be used although they are very
complex and expensive and may be required for very high speeds.
Inlets are usually custom designed not much information has been released in the literature. It
is known that companies such as Kamewa and Riva Calzoni have performed extensive
experimental investigation. Kamewa produces actual inlet design for each application. Inlet
efficiencies of 0.8 or higher are achieved.
Nozzles
Nozzles may be of the pelton type in which the outer and inner walls are straight and parallel
as shown in Figure , in which case vena contracta occurs downstream of the nozzle exit plane.
In case of well rounded entrance to parallel throat, in which case there is no external vena
contracta and the nozzle area is coincident with the waterjet area(prior to break-up of the jet
surface).
Well designed stators and nozzles results in very high efficiencies ( as high as 99%). No
matter how well-designed a pump may be, the velocity will not be quite uniform and this
should be taken into account in the momentum flux and kinetic energy of the flow
calculations.
-
NM305 Yacht and Powercraft Design waterjets
5
It is possible that a parallel-throat nozzle to experience cavitation on the nozzle if the nozzle
walls are not designed correctly.
-
NM305 Yacht and Powercraft Design waterjets
6
-
NM305 Yacht and Powercraft Design waterjets
7
-
NM305 Yacht and Powercraft Design waterjets
8
Steering & Reversing Gear
Steering is achieved by deflecting the waterjet at the nozzle exit with a steering sleeve (or a
pair of vanes called buckets). The sleeves are usually hydraulically operated although some
manufacturers use mechanical linkages in smaller sizes.
Reverse thrust is obtained by use of a reversing bucket of some type which deflects the jet
downwards and forward usually.
Partial use of the reversing bucket catches only part of the jet giving variable net thrust either
forward or astern with a neutral, zero net thrust position. This capability provides the vessel
excellent maneuverability alongside when docking or undocking. (See following for steering
capability of W/J)
-
NM305 Yacht and Powercraft Design waterjets
9
Inlet Screen (Debris Grill)
The question of provision, or not, of an inlet screen must be addressed early on. A screen may
exclude some types of debris which could damage the pump. On the other hand hard,
sometimes large objects may break the screen which is then ingested by the pump possibly
with serious damage. Inlet screens can also significantly reduce the inlet performance. In
summary they are desirable for small boat applications but not for large W/Js.
Braking Capability of Waterjet
Unlike propellers, W/Js may allow full power to be applied in reverse at full forward speed
which may be maintained until the ship has slowed down considerably after which power
must be reduced progressively to the max allowed at zero speed.
-
NM305 Yacht and Powercraft Design waterjets
10
The reverse thrust will greatly exceed forward thrust initially as it is now the sum of the gross
jet thrust reverse component and momentum drag (i.e. TN = TG DM for normal ahead
condition; (a) breaking condition breaking force, FB = - TG-DM). The reverse thrust will
rapidly decrease as the ship slows down until at zero speed where it is only a fraction of
forward thrust available.
Because of the above reasons they have excellent braking capability.
Steering Capability
As mentioned earlier, deflection of the jet produces side force for steering. Once can easily
demonstrate that by using simple cos relationship, a small deflection of the waterjet (i.e.
Thrust) can generate very large side forces at a negligible cost of the thrust loss (e.g. 11.5
deflection will produce 20% of the total gross thrust while the gross thrust lost due to the
deflection will be about 2%). This is why they have excellent steering capability.
Installation
Many waterjet pumps are transom mounted and the thrust is transmitted directly to the
transom. Therefore the transom must be strong to take thrust and the weight of W/J unit.
Some are hull bottom mounted and some are structurally connected to the hull at both transom
and bottom.
Selection of Engine & Gear Box
Most W/Js are powered by high speed diesel marine engines. In some applications marine gas
turbines are preferred due to their low weight and small size. However presently available
marine gas turbines cannot match the specific fuel consumption of diesel engines so there is a
trade-off involving weight, size, initial cost and fuel cost. Waterjet pumps do not usually
require reversing gearboxes, therefore, the transmission are lighter, less costly and smaller
than those for propellers.
-
NM305 Yacht and Powercraft Design waterjets
11
EFFICIENCY OF WATERJET PROPULSION SYSTEM
Overall efficiency (or OPC, Overall Propulsive Coefficient) of a marine vehicle can be
defined as
B
E
P
POPC (1)
Where PE the effective power, PB the engine brake power
Eq (1) allows the designer to estimate necessary installed power with a suitable power margin
to drive the waterjet provided that the effective power curve is known
By definition
PE = R Vs (2)
T = R /(1-t) (3)
PT = T Vs (4)
Where R the hull resistance, Vs the vessel speed, T the thrust produced by waterjet, t the thrust
deduction fraction and PT the useful (thrust) power.
By denoting the shaft power delivered to the pump by Ps, the propulsive efficiency (or QPC,
Quasi Propulsive Coefficient) can be defined as
S
TD
P
P (5)
On the other hand by using similar analogy to that used for the propellers, D can be also
represented as
D = j P (6)
where j is the jet efficiency which is somewhat analogous the open water efficiency (i.e. No)
of a propeller, whilst P is the pump efficiency as installed in the waterjet propulsor
The pump efficiency P is usually obtained from a uniform flow performance test and
combined with a relative. Relative rotative efficiency (ie. p) to take account of distortion of
flow at the pump face due waterjet inlet. Hence D can be written as
D = J P R (7)
(where R = 1.0)
Unless the pump is direct-coupled to the engine, there will be power transmission losses. Even
if direct-coupled, there may be additional bearings and seal losses where the pump shaft
-
NM305 Yacht and Powercraft Design waterjets
12
penetrates the inlet duct, which are not included in the pump efficiency. Hence a transmission
efficiency t is defined as
B
S
tP
P (8)
Now by using (2) in (3)
)1( tVTP SE (9)
From (8) & (5) Dt
T
t
S
B
PPP
(10)
By substituting (7) into (10)
RPjt
TB
PP
(11)
By inserting (4) into (11)
RPjt
SB
VTP
(12)
Finally by substituting (9) & (12) in (1), the OPC becomes
OPC = (1-t) J P R t (13)
In e.g. (13) the thrust deduction fraction t can be positive or negative depending on the ship
speed and the type of the hull. Generally t is positive for Vs < 25 but may be negative for
higher speeds. This accounts for the optimistic values of OPC in some installations.
In e.g. (13) P the pump efficiency can be expressed as follows by analogy with propellers as
Q
PK
2
where is the flow coefficient and defined as the ratio of the axial velocity entering the
impeller to the impeller tip speed which can be represented by
3DN
Q and
is the pressure coefficient and defined as the ratio of the pressure rise through the pump to
the dynamic pressure due to rotational speed which can be represented by
-
NM305 Yacht and Powercraft Design waterjets
13
22 DN
Hg
KQ is the normal torque coefficient of propeller technology Q is the flow rate, N is the
rotational speed, D is the impeller diameter, H is the pump head, g is the gravitational
acceleration.
For a modern well-designed aerial or mixed flow pump the value of P should be of the order
of 0.9. Whilst the value of P is clearly higher for a waterjet than a propeller, this is not the
basis upon which the comparison should be made.
Jet Efficiency
In eg (13 the jet efficiency j can be expressed as
)(
)(
EpumpthebydoneworkUseful
WDvesseltheondoneworkusefulj
(14)
To be able to express WD & E we need to define some fundamental hydrodynamic
quantities associated with waterjet which are Mass Flow Rate, Gross Thrust, Momentum
Drag & Net Thrust as follows
Mass Flow Rate (m): The mass flow rate (kg/s) of water through a waterjet of nozzle
and given by
jjn VAm (15)
where : water density, Aj: cross-sectional area of discharge nozzle
Vj: waterjet discharge velocity
On the other hand the flow rate at inlet is
iii VAm
where Ai : the cross-sectional area of inlet
Vi : inlet flow velocity
If there is no bleeding from the inlet for some other purpose, the mass flow rate can be
defined as
ni mmm
Gross Thrust (TG) : This is the force experienced by the propulsor due to the
momentum flux from the nozzle i.e.
-
NM305 Yacht and Powercraft Design waterjets
14
jnG VmT
jG VmT (16)
Gross thrust is great importance to marine propulsor operation apart from its obvious primary
purpose. Deflection of the jet produces side force for steering.
SinTF GS assuming a horizontal jet.
Small deflections produce very large side forces with almost negligible reduction in forward
thrust since loss of forward thrust is given by
)cos1( GTT
For example if the jet is deflected 11.5 degrees horizontally, the ideal side force is 20% of the
gross thrust while the loss of forward gross thrust is only 2%. Since net thrust is typically
about 40% of gross thrust, the side force represents 50% of the net thrust which propels the
ship, for a loss of net thrust of 5%. This is what gives wat3erjet ships their excellent steering
capabilities.
Momentum Drag (DM) : Water entering the Waterjet inlet is accelerated to ship speed Vs
and this exerts a momentum Drag DM given by
sim VmD sVm (17)
Net Thrust (TN) The net thrust is defined as
)( mGN DTT )( sj VVm (18)
So going back to the useful work done on the vessel (WD) expression, this can
be described as:
sNVTWD ssj VVVm )( (19)
Assuming perfect inlet recovery (i.e. no frictional losses) and neglecting elevation of the
nozzle above the sea level, the useful energy added by the pump (E) is equal to the change of
energy of the water passing through the system i.e.
)2
1
2
1 22sijn VmVmE
since mn = mi = m
)(2
1 22sj VVmE (20)
So from (14), (19) & (20) the jet efficiency.
-
NM305 Yacht and Powercraft Design waterjets
15
)(2
1sj
Sj
VV
V
By introducing = Vs / Vj )1(
2
j (21)
Eq (21) is for the ideal case and indicates that as goes to1.0, j increases monotonically.
When the ship speed (Vs) equals the jet velocity (Vj) the ideal jet efficiency is 100%. At this
condition no thrust will be developed and, therefore, the ship will have no resistance which is
unrealistic.
Therefore a lost factor (coefficient) as proportion of the perfect inlet energy is introduced to
the useful energy expression in (20) as
222
2
1)(
2
1ssj VmVVmE (22)
then the jet efficiency including the losses becomes
E
WDj
)1)(1(
)1(22
(23)
As shown in the figure below j reaches to its max depending upon the value of loss of
Coefficient . When the losses are equal to the ideal inlet energy, the maximum efficiency
will be 50%.
until early 90s the equation 23 was used assuming a value of as;
= 0.25 to 0.5 for well-designed systems
= 0.50 to 1.0 for poorly designed ones as given by Kim [1].
However, this does not represent the state of the art waterjet efficiency which should include
various loss components properly associated with the inlet nozzle and elevation of the nozzle
as outlined in the following section
-
NM305 Yacht and Powercraft Design waterjets
16