Yannick Privat and Emmanuel Tr´elat - sorbonne-universite.fr
23
ESAIM: COCV 21 (2015) 301–323 ESAIM: Control, Optimisation and Calculus of Variations DOI: 10.1051/cocv/2014028 www.esaim-cocv.org CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE Yannick Privat 1 and Emmanuel Tr´ elat 2 Abstract. We consider a finite-length ferromagnetic nanowire, in which the evolution of the magne- tization vector is governed by the Landau–Lifshitz equation. We first compute all steady-states of this equation, and prove that they share a quantization property in terms of a certain energy. We study their local stability properties. Then we address the problem of controlling and stabilizing steady-states by means of an external magnetic field induced by a solenoid rolling around the nanowire. We prove that, for a generic placement of the solenoid, any steady-state can be locally exponentially stabilized with a feedback control. Moreover we design this feedback control in an explicit way by considering a finite-dimensional linear control system resulting from a spectral analysis. Finally, we prove that we can steer approximately the system from any steady-state to any other one, provided that they have the same energy level. Mathematics Subject Classification. 58F15, 58F17, 53C35. Received October 9, 2013. Revised March 27, 2014 Published online January 15, 2015. 1. Introduction Semiconductor nanowires are emerging as remarkably powerful tools in nanoscience, with the potential of having a significant impact on electronics, but also on numerous other areas of science and technology such as life sciences and healthcare. Nanotechnologies based on semiconductor nanowires promise new generations of devices benefiting from large surface to volume ratios, small active volumes, quantum confinement effects and integration in complex architectures on the nanoscale. Among the applications, magnetic storage on devices such as hard-disks or magnetic MRAMs is one of the most important issues (see, e.g.,[24]). Indeed the use of spin injection opens the door towards new spintronic applications and storage technologies while allowing a quick access to information, with a speed which can be millions of times larger than the one in today’s hard-disks. The magnetic moment of a ferromagnetic material represented by a domain Ω ⊂ IR 3 is usually modelled as a time-varying vector field m : IR × Ω →S 2 , Keywords and phrases. Landau–Lifshitz equation, nanowire, control, Kalman condition, feedback stabilization. 1 CNRS, Sorbonne Universit´ es, UPMC Univ Paris 06, UMR 7598, Laboratoire Jacques-Louis Lions, 75005 Paris, France. [email protected] 2 Sorbonne Universit´ es, UPMC Univ Paris 06, CNRS UMR 7598, Laboratoire Jacques-Louis Lions, Institut Universitaire de France, 75005 Paris, France. [email protected] Article published by EDP Sciences c EDP Sciences, SMAI 2015
Transcript of Yannick Privat and Emmanuel Tr´elat - sorbonne-universite.fr

ESAIM: COCV 21 (2015) 301–323 ESAIM: Control, Optimisation and Calculus of VariationsDOI: 10.1051/cocv/2014028 www.esaim-cocv.org
CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTHFERROMAGNETIC NANOWIRE
Yannick Privat1
and Emmanuel Trelat2
Abstract. We consider a finite-length ferromagnetic nanowire, in which the evolution of the magne-tization vector is governed by the Landau–Lifshitz equation. We first compute all steady-states of thisequation, and prove that they share a quantization property in terms of a certain energy. We studytheir local stability properties. Then we address the problem of controlling and stabilizing steady-statesby means of an external magnetic field induced by a solenoid rolling around the nanowire. We provethat, for a generic placement of the solenoid, any steady-state can be locally exponentially stabilizedwith a feedback control. Moreover we design this feedback control in an explicit way by considering afinite-dimensional linear control system resulting from a spectral analysis. Finally, we prove that wecan steer approximately the system from any steady-state to any other one, provided that they havethe same energy level.
Mathematics Subject Classification. 58F15, 58F17, 53C35.
Received October 9, 2013. Revised March 27, 2014Published online January 15, 2015.
1. Introduction
Semiconductor nanowires are emerging as remarkably powerful tools in nanoscience, with the potential ofhaving a significant impact on electronics, but also on numerous other areas of science and technology such aslife sciences and healthcare. Nanotechnologies based on semiconductor nanowires promise new generations ofdevices benefiting from large surface to volume ratios, small active volumes, quantum confinement effects andintegration in complex architectures on the nanoscale. Among the applications, magnetic storage on devices suchas hard-disks or magnetic MRAMs is one of the most important issues (see, e.g., [24]). Indeed the use of spininjection opens the door towards new spintronic applications and storage technologies while allowing a quickaccess to information, with a speed which can be millions of times larger than the one in today’s hard-disks.
The magnetic moment of a ferromagnetic material represented by a domain Ω ⊂ IR3 is usually modelled asa time-varying vector field
m : IR × Ω → S2,
Keywords and phrases. Landau–Lifshitz equation, nanowire, control, Kalman condition, feedback stabilization.
1 CNRS, Sorbonne Universites, UPMC Univ Paris 06, UMR 7598, Laboratoire Jacques-Louis Lions, 75005 Paris, [email protected] Sorbonne Universites, UPMC Univ Paris 06, CNRS UMR 7598, Laboratoire Jacques-Louis Lions, Institut Universitaire deFrance, 75005 Paris, France. [email protected]
Article published by EDP Sciences c© EDP Sciences, SMAI 2015

302 Y. PRIVAT AND E. TRELAT
where S2 is the unit sphere of IR3, the evolution of which is governed by the Landau–Lifshitz equation (see [20])
∂m
∂t= −m ∧ h(m) − m ∧ (m ∧ h(m)), (1.1)
where the effective field h(m) is defined by
h(m) = 2A�m + hd(m) + hext.
The constant A > 0 is called the exchange constant. By normalization we assume that A = 1/2. Thedemagnetizing field hd(m) is the solution of the equations div(hd(m) + m) = 0 and curl(hd(m)) = 0 in D′(IR3),where m is extended to IR3 by 0 outside Ω, and D′(IR3) is the space of distributions on IR3. The field hext is anexternal one, for instance it can be an external magnetic field. Other relevant terms may be added for a moreaccurate physical model, for instance giving an account for the anisotropic behavior of the crystal composingthe ferromagnetic material.
The magnetization is usually assumed to satisfy homogeneous Neumann boundary conditions, that is, thenormal derivative of m along ∂Ω vanishes.
The existence of solutions of (1.1) is a challenging issue in general. We refer to [2, 7, 21, 22, 28] for results onthe existence of global weak solutions or on the existence and uniqueness of local strong solutions. It can benoted that h(m) = −∇E(m) with
E(m) =12
∫Ω
|∇m|2 dx +12
∫IR3
|hd(m)|2 dx −∫
Ω
hext · m dx, (1.2)
which is the energy functional given in [5] in the thermodynamical static model description of ferromagneticmaterials. Whereas the Landau–Lifshitz equation (1.1) describes the dynamic evolution in time of the magne-tization, the static theory stipulates that the steady-states states of the magnetization field are the minimizersof the energy E: in the ferromagnetic material represented by the domain Ω, there appears a spontaneousmagnetization m (of norm 1), minimizing the energy E(m) (see [16]). Note also that, given a solution m of (1.1)with a constant (in time) external field hext, there holds
ddt
(E(m(t, ·))) = −∫
Ω
|h(m(t, x)) − (h(m(t, x)) · m(t, x))m(t, x)|2 dx, (1.3)
and thus this energy functional is naturally nonincreasing along a solution of (1.1).Since the two terms at the right-hand side of (1.1) are orthogonal, every steady-state of (1.1) must satisfy
m ∧ h(m) = 0,
and accordingly the set of steady-states coincides with the set of extremal points of the energy E.The set of steady-states of (1.1) is known to be very rich in the sense that it contains a number of diverse
pattern configurations, such as Bloch or Neel walls (see [13,17]). This diversity could be used in magnetic storagetechnologies in order to encode information or to perform logic operations (see [1, 4, 15, 27]).
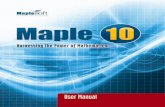
In this paper we focus on ferromagnetic nanowires with finite length. Such ferromagnetic materials arerepresented by a domain Ω which is a truncated cylinder whose ratio ε = radius
length is very small (see Fig. 1). Fromthe mathematical point of view, it has been proved in references [8, 25] with Γ convergence arguments that,if ε tends to 0 then one ends up with a one-dimensional model of the ferromagnetic nanowire, with a domainΩ = (0, L) (here, L > 0 is the length of the nanowire) and the 1D Landau–Lifshitz equation
∂m
∂t= −m ∧ h(m) − m ∧ (m ∧ h(m)), (1.4)

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 303
e2
ε
e1
e3
Figure 1. Ferromagnetic nanowire.
where m(t, x) ∈ S2 is the magnetization vector, for every time t and for every x ∈ (0, L), and where the effectivefield h(m) takes the more particular form
h(m) = ∂xxm − m2e2 − m3e3 + hext.
The nanowire is here assumed to be parallel to e1, the first vector of an orthonormal basis (e1, e2, e3) of IR3,as on Figure 1, and m = m1e1 + m2e2 + m3e3. Morever m satisfies the Neumann boundary conditions
mx(t, 0) = mx(t, L) = 0. (1.5)
It can be noted that infinite-length 1D nanowires (that is, Ω = IR) have been the subject of many studiesin physics or in mathematics. Indeed it is well-known that steady-states of infinite nanowires are Bloch walls,analytically described by usual hyperbolic functions, and whose main physical feature is to induce two almostlinear regimes separated by a wall (brutal change of the magnetization). The location of this wall evolves whenthe nanowire is submitted to an external magnetic field. The dynamics of walls and their stability features havebeen investigated in many physical studies (such as [3, 4, 23, 27]), and then has been analyzed mathematicallyin reference [6] together with control and stabilization properties by means of an external magnetic field inreferences [9, 10].
In this paper we first compute and characterize all steady-states of a finite-length 1D nanowire. We provethat there exists a finite number of one-parameter families of steady-states that we express analytically in termsof elliptic functions. This finite number increases with the value of the length L of the nanowire. Note that thisstudy of steady-states is similar (but simpler) to the one of [19] where steady-states have been computed for a1D network of nanowires. Moreover, as in reference [19] we exhibit a quantization property of the steady-states,showing that a certain notion of energy can only take some discrete values. Using spectral tools, we investigatethe local stability features of the steady-states.
Then we address the problem of control and stabilization of the steady-states of a finite-length nanowire bymeans of an external magnetic field. This magnetic field is generated by a solenoid (inductance coil) localizedalong the nanowire (see Fig. 2). More precisely, assuming that the nanowire is represented by the intervalΩ = (0, L), the solenoid is assumed to generate a magnetic field only along the portion (a, b) of (0, L) (with0 � a < b � L arbitrary). From the physical point of view this approximation is acceptable, since outside ofthe domain of the solenoid the norm of the magnetic field generated by this inductance is rapidly decreasingaccording to Biot–Savard laws. Moreover, we assume that the axis of the solenoid has an angle of nonzeromeasure with the axis of the nanowire. Therefore we assume that the magnetic field generated by the solenoid is
hext(t) = u(t)χ(a,b)(x)�d,

304 Y. PRIVAT AND E. TRELAT
u(t)χ(a,b)(x)�d
a b0 L
Figure 2. The solenoid used as controller.
where �d = d1e1 +d3e3 is a fixed vector of IR3 with d3 �= 0. Here, the notation χJ(x) stands for the characteristicfunction of a measurable set J , that is, χJ(x) = 1 whenever x ∈ J and χJ (x) = 0 otherwise. The scalar u(t)denotes the magnitude at time t of the magnetic field and is our control.
The Landau–Lifshitz equation yields the control system
∂m
∂t= −m ∧ h0(m) − m ∧ (m ∧ h0(m)) − uχ(a,b)m ∧ �d − uχ(a,b)m ∧ (m ∧ �d)
mx(t, 0) = mx(t, L) = 0, (1.6)
with
h0(m) = ∂xxm − m2e2 − m3e3. (1.7)
The problem that we address in the present paper is the following: given two steady-states m1 and m2, dothere exist a time T > 0 and a control function u defined on (0, T ) such that the corresponding magnetizationvector m, solution of (1.4) with Neumann boundary conditions (1.5) and starting at m1, reaches m2 withintime T ? Moreover, can such controls be designed in a nice and robust way?
Moreover we investigate the following practical question: how does the orientation �d impact the above con-trollability issue? For instance, can the choice �d = e1 solve the problem?
In the paper we prove that, with a solenoid with d3 �= 0 as in Figure 2 and for generic values of a and bthat we will characterize in the sequel, any steady-state can be locally exponentially stabilized with an explicitfeedback control, which can be moreover designed from a finite-dimensional linear control system. As a secondresult, we prove that it is possible to steer approximately the magnetization vector from a steady-state to anyother one, provided that they have the same level of (quantized) energy. We will actually show that our resultholds true for all values of a and b but a finite number of (resonant) values, and hence our result shares somerobustness properties.
We stress on the fact that the system is acted upon with a localized magnetic field only (as in Fig. 2), howeverour results hold in the particular case a = 0, b = L.
In reference [8], the authors consider a particular steady-state and investigate the case where d3, the thirddirection of the solenoid, is zero. They prove that the resulting control system is stabilizable, but is not asymp-totically stabilizable with their feedback law. More details are provided in Remark 3.5. We stress that themain novelty of our paper consists of the asymptotic stabilization results stated in Section 3.1, under genericconditions on the direction of the solenoid.

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 305
2. Quantized steady-states and their stability properties
2.1. Computation of all steady-states
Recall that the steady-states of (1.4), in the absence of control (u = 0) are characterized by
m ∧ h0(m) = 0 x ∈ (0, L)|m| = 1 x ∈ (0, L)mx(0) = mx(L) = 0,
(2.1)
where h0 is defined by (1.7).
Theorem 2.1. Let N0 =[
Lπ
], the integer part of L
π . There exist N0 real numbers E1, . . . , EN0 in [0, 1) suchthat every steady-state of (1.4) is either of the form
m(x) =
⎛⎝±1
00
⎞⎠ = ±e1, (2.2)
or
m(x) =
⎛⎝ cos θ(x)
cosω sin θ(x)sin ω sin θ(x)
⎞⎠ , (2.3)
for some ω ∈ IR, where θ is a solution of the pendulum equation
θ′′(x) = sin θ(x) cos θ(x), 0 < x < L,
θ′(0) = θ′(L) = 0, (2.4)
satisfyingθ′2 + cos2 θ = Cst = En ∈ {E1, E2, . . . , EN0}.
In particular the set of steady-states reduces to the two functions given by (2.2) whenever L < π.Note that the two steady-states (2.2) can be actually written in the form (2.3) (with θ = 0 or π), but with
θ′2 + cos2 θ = Cst = 1. We prefer however the presentation above, putting apart the trivial steady-states (2.2).The steady-states (2.3) consist of N0 one-parameter families of steady-states, where the continuous parameter
is ω ∈ IR. They are quantized by the value of what we can call their energy θ′2 + cos2 θ (which is constant in xover (0, L)): this energy can only take certain precise values among the set {E1, E2, . . . , EN0}. This quantizationof the set of steady-states is due to the Neumann conditions θ′(0) = θ′(L) = 0, as shown in the proof below.
Note that if L = π then there must hold θ = Cst = π/2. This particular steady-state corresponds to thecenter of the phase portrait of the pendulum (see Fig. 3).
Proof. Every steady-state of (1.4) can be written as m = m1e1 + m2e2 + m3e3 (function of x only), and (2.1)yields
m1m′′3 − m′′
1m3 − m1m3 = 0 on (0, L), (2.5)m2m
′′3 − m3m
′′2 = 0 on (0, L), (2.6)
m1m′′2 − m′′
1m2 − m1m2 = 0 on (0, L), (2.7)m2
1 + m22 + m2
3 = 1 on (0, L), (2.8)m′(0) = m′(L) = 0. (2.9)

306 Y. PRIVAT AND E. TRELAT
The integration of the second equation of (2.5) yields the existence of a real number α such that m2m′3 −
m′2m3 = α on (0, L). Moreover, since m takes its values in S2, we set
m1(x) = cos θ(x),
m2(x) = cosω(x) sin θ(x),
m3(x) = sin ω(x) sin θ(x), (2.10)
for every x ∈ (0, L). Then, it follows from (2.5) that
2θ′′ sin ω + ω′′ cosω sin(2θ) − (ω′2 + 1) sinω sin(2θ) + 4ω′θ′ cosω cos2 θ = 0, (2.11)2θ′′ cosω − ω′′ sin ω sin(2θ) − (ω′2 + 1) cosω sin(2θ) − 4ω′θ′ sin ω cos2 θ = 0, (2.12)
ω′ sin2 θ = α. (2.13)
Moreover, since
m′1 = −θ′ sin θ,(
m′2
m′3
)=
(cosω − sinω
sinω cosω
)(θ′ cos θ
ω′ sin θ
),
the boundary conditions yield θ′(y) sin θ(y) = θ′(y) cos θ(y) = ω′(y) sin θ(y) = 0 for y = 0 and y = L, hence
θ′(0) = θ′(L) = 0 and ω′(0) sin θ(0) = ω′(L) sin θ(L) = 0.
In particular, it follows from (2.13) that necessarily α = 0 and hence
ω′ sin2 θ = const. = 0.
Then, except the particular cases θ = 0 or θ = π (which yield the steady-states (2.2)), we get that ω isconstant.
Now, multiplying (2.11) by sinω and (2.12) by cosω and adding these two equalities, it follows that
θ′′ = sin θ cos θ.
In particular θ′2 + cos2 θ is constant. This is a pendulum equation. Since the solutions θ of this pendulumequation must satisfy the Neumann conditions θ′(0) = θ′(L) = 0, they must correspond to pieces of particularclosed curves drawn on the phase portrait of Figure 3. More precisely, they must be pieces of periodic solutions,inside the domain enclosed by the separatrices of the pendulum in the phase portrait, with terminal pointsalong the horizontal axis, and with a period T that has to be in a certain ratio with respect to the length L ofthe nanowire. Indeed the condition θ′(0) = θ′(L) = 0 imposes that L is an integer multiple of T/2: there mustexist n ∈ IN∗ such that
L = nT
2· (2.14)

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 307
Figure 3. Phase portrait of (2.4) in the plane (θ, θ′).
The explicit expression of the solutions of the pendulum equation, as well as their periods, is well-known infunction of the elliptic functions3. More precisely, one has
θ′(x) = k cn(
x + sn−1
(1k
cos θ(0), k)
, k
), (2.15)
cos θ(x) = k sn(
x + sn−1
(1k
cos θ(0), k)
, k
), (2.16)
for every x ∈ (0, L), with θ′2 + cos2 θ = k2 (with 0 � k < 1, the modulus of the elliptic function). The period ofθ is T = 4K(k). Hence we have obtained that
L = 2nK(k).
Since K is an increasing function from [0, 1) in [π/2, +∞), the modulus k can take only certain precise values:this equation has exactly N0 solutions. The result follows. �
Remark 2.2. What is interesting here is the quantization property of the steady-states, whose energy θ′2 +cos2 θ can only take certain values. A similar result was obtained in [19] for a network of nanowires. Note thatin [8] the authors consider throughout their work the particular steady-state (up to the rotation parameter ω)given by (2.3)–(2.4) with n = 1 (that is, with θ making half a period in the phase portrait).
3Recall that, given k ∈ (0, 1), k =√
1 − k2 and η ∈ [0, 1], the Jacobi elliptic functions cn, sn and dn are defined from theirinverse functions with respect to the first variable,
cn−1 : (η, k) �−→∫ 1
η
dt√(1 − t2)
(k2 + k2t2
)
sn−1 : (η, k) �−→∫ η
0
dt√(1 − t2) (1 − k2t2)
dn−1 : (η, k) �−→∫ 1
η
dt√(1 − t2) (t2 + k2 − 1)
(η �√
1 − k2 in that case)
and the complete integral of the first kind is defined by
K(k) =
∫ π/2
0
dθ√1 − k2 sin2 θ
·
The functions cn and sn are periodic with period 4K(k) while dn is periodic with period 2K(k).

308 Y. PRIVAT AND E. TRELAT
2.2. Linearized system around a steady-state
Let us linearize the control system (1.4) around a steady-state. Let M0 be an arbitrary steady-state (we haveseen that they exist provided that L � π). Without loss of generality we assume that ω = 0 (since Eq. (1.4) isinvariant with respect to rotations in ω), and thus that
M0(x) =
⎛⎜⎝
cos θ(x)
sin θ(x)
0
⎞⎟⎠ , (2.17)
with θ solution of the pendulum equation (2.4), and with
θ′2 + cos2 θ = En,
for some given n ∈ {1, . . . , N0}.Note that the trivial steady-states (2.2) can be put in this form provided that one takes En = 1. In what
follows, to avoid triviality we assume that the steady-state M0 is not of the form (2.2).Following [6, 8, 19], we complete M0 into the mobile frame (M0(x), M1(x), M2), with
M1(x) =
⎛⎜⎝− sin θ(x)
cos θ(x)
0
⎞⎟⎠ , M2 =
⎛⎜⎝
0
0
1
⎞⎟⎠ .
For every solution m of the controlled Landau–Lifshitz equation (1.6), considering m as a perturbation of thesteady-state M0, since |m(t, x)| = 1 pointwisely, we decompose m : R+ ×R −→ S2 ⊂ R3 in the mobile frame as
m(t, x) =√
1 − r21(t, x) − r2
2(t, x) M0(x) + r1(t, x)M1(x) + r2(t, x)M2. (2.18)
According to ([8], Sect. 4) and ([19], Sect. 3.1), m is solution of (1.4) if and only if r =(
r1
r2
)satisfies
∂r
∂t= Ar + Bu + R(x, r, rx, rxx, u), (2.19)
where
A =
(A + Id A + En Id
−(A + Id) A + En Id
)(2.20)
withA = ∂2
xx − 2 cos2 θ Id (2.21)
defined on the domainD(A) = {f ∈ H2(0, L) | f ′(0) = f ′(L) = 0}
(and hence D(A) = D(A) × D(A)), where
B(x) = χ(a,b)(x)
(d3 − d1 sin θ(x)
d3 + d1 sin θ(x)
), (2.22)
and where the higher-order terms are
R(x, r, rx, rxx, u) = G(r)rxx + H1(x, r)rx + H2(r)(rx, rx) + P (x, r, u),

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 309
where
G(r) =
⎛⎝ r1r2√
1−|r|2r22√
1−|r|2 +√
1 − |r|2 − 1
− r21√
1−|r|2 −√1 − |r|2 + 1 − r1r2√1−|r|2
⎞⎠ ,
H1(x, r) =2θ′(x)√1 − |r|2
(r2
√1 − |r|2 − r1r
22 −r2(1 − r2
1)
r2(1 − r22)
√1 − |r|2r2 + r1r
22
),
H2(r) is the quadratic form on IR2 defined by
H2(r)(X, X) =(1 − |r|2)X�X + (r�X)2
(1 − |r|)3/2
(√1 − |r|2r1 + r2√1 − |r|2r2 − r1
),
and
P (x, r, u) =
(P1(x, r, u)
P2(x, r, u)
),
with
P1(x, r, u) = −r1
√1 − |r|2 cos θ + (r2
1 − r2) sin θ
−uχ[a,b]d1
((r2 + r1
√1 − |r|2) cos θ − r2
1 sin θ)
−uχ[a,b]d3
(1 −
√1 − |r|2 + r1r2
)
and
P2(x, r, u) = (r1 − r2
√1 − |r|2) cos θ + sin θ(r1r2 +
√1 − |r|2 − 1)
−uχ[a,b]d1
((1 −
√1 − |r|2 − r1r2) sin θ + (r2
√1 − |r|2 − r1) cos θ
)−uχ[a,b]d3r
22 .
What is important is the estimates
G(r) = O(|r|2) , H1(r) = O(|r|), H2(r) = O(|r|),
and in particular the fact that there exists a constant C > 0 such that, if |r|2 � 12 , then
|R(x, r, p, q, u)| � C(|r|2|q| + |r||p| + |r||p|2 + |u||r|) , (2.23)
for every x ∈ IR, (r, p, q) ∈ (IR2)3, and u ∈ IR2. This estimate shows that R(x, r, rx, rxx, u) is a term of higherorder in (2.19) (remainder term).
2.3. Spectral properties of the steady-states
In this section we analyze the spectral properties of the steady-states of the uncontrolled Landau–Lifshitzequation, that is, we take u(·) = 0 in (2.19), and we analyze the underlying linear operator A defined by (2.20).
As we will see, A is not diagonalizable, however it can be diagonalized by blocks. We first need to analyzethe spectral properties of the operator A defined by (2.21). Note that
Ar = A(
r1
r2
)=
((A + Id)r1 + (A + En Id)r2
−(A + Id)r1 + (A + En Id)r2
),
for every r ∈ D(A) = D(A) × D(A).

310 Y. PRIVAT AND E. TRELAT
Spectral analysis of A. The operator A = ∂2xx − 2 cos2 θ Id defined on the domain D(A) = {f ∈
H2(0, L) | f ′(0) = f ′(L) = 0} is clearly self-adjoint in L2(0, L). As a first preliminary remark, we see using anintegration by parts that
〈(A + En Id)f, f〉L2 = −‖f ′ − θ′cotan θ f‖2L2,
for every f ∈ D(A). Therefore,〈(A + En Id)f, f〉L2 � 0,
which means that the operator A + En Id defined on D(A) is nonpositive.As a second preliminary remark, we are able to compute two eigenfunctions of A. Indeed, we have
A sin θ = −En sin θ,
and thatA cos θ = −(1 + En) cos θ.
Note that, if En = 0 then θ = π/2 and in that case cos θ is not an eigenfunction. Similarly, if En = 1 thenθ = 0 or π and in that case sin θ is not an eigenfunction. For all other cases, one has 0 < En < 1, and we havethus computed two eigenfunctions. Moreover, since A + En Id is nonpositive, it follows that −En is the largesteigenvalue of A, associated with the eigenfunction sin θ.
Proposition 2.3. There exists a Hilbert basis (ej)j∈IN of L2(0, L), consisting of eigenfunctions of A, associatedwith real eigenvalues λj that are simple, with
−∞ < · · · < λj < · · · < λ1 < λ0 = −En, (2.24)
and λj → −∞ as j → +∞. Moreover,
• the largest eigenvalue λ0 = −En is associated with the eigenfunction e0 = sin θ;• the eigenfunction ej vanishes exactly j times on (0, L);• the (n + 1)th eigenvalue is λn = −(1 + En) and is associated with the eigenfunction en = cos θ;• −1 is not an eigenvalue of the operator A.
Remark 2.4. The fact that −1 is not an eigenvalue of the operator A will play an important role in the sequel(see Sect. 3). It will ensure in particular that our controllability results hold true by using only one singlesolenoid instead of two or more.
Proof. The existence of the Hilbert basis of eigenfunctions follows from the application of the spectral theoremto the compact self-adjoint operator f ∈ L2(0, L) �→ w ∈ L2(0, L), where w is the unique solution of
w′′ − (2 cos2 θ + 1)w = f, x ∈ (0, L)
w′(0) = w′(L) = 0.
The simplicity of the eigenvalues of A and the nodal domain property are standard results for Sturm–Liouvilleoperators with Neumann boundary conditions (see for example [14, 29]). Since A cos θ = −(1 + En) cos θ andsince the function cos θ vanishes n times along (0, L), we deduce that −(1+En) is the (n+1)th eigenvalue of A.
It remains now to prove that −1 is not an eigenvalue of A. We define the functions F1 and F2,γ by
F1(x) = θ′(x) and F2,γ(x) = θ′(x)∫ x
γ
dt
θ′(t)2,

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 311
where γ denotes any real number that does not belong to the set of zeros of the function θ′. Denote by x0 anyzero of the function θ′. Notice that, since θ satisfies (2.4), one has θ(3)(x0) = 0. Using a Taylor expansion withintegral rest, it follows that there exist two functions η1 and η2, respectively smooth in (0, L) and smooth atx0, such that η1(x0) = η2(x0) = 0 and
θ′(x) = θ′′(x0)(x − x0) + (x − x0)2η1(x)1
θ′(x)2=
1θ′′(x0)2(x − x0)2
+ η2(x).
Moreover, the function η2 is smooth at x0 and every point where θ′ does not vanish. According to theexpansions of θ′ and 1
θ′2 above, one easily computes
F2,γ(x) = − 1θ′′(x0)
+x − x0
θ′′(x0)(α − x0)+ o
x→x0(x − x0),
showing in particular that
F2,γ(x0) = − 1θ′′(x0)
anddF2,γ
dx(x0) =
1θ′′(x0)(α − x0)
.
Moreover the space of solutions of the ordinary differential equation
w′′ − 2 cos2 θw = −w in (0, L)
is exactly Span{F1, F2,γ}. It follows that −1 is an eigenvalue of A if, and only if there exists γ ∈ IR such thatthe function y : x �→ F ′
2,γ(0)F1(x) − F ′1(0)F2,γ(x) satisfies y′(L) = 0. This is equivalent to the condition
F ′1(0)
F ′1(L)
=F ′
2,γ(0)F ′
2,γ(L). (2.25)
Noting that F ′1(0)
F ′1(L) = θ′′(0)
θ′′(L) and F ′2,γ(0)
F ′2,γ(L) = γ−L
γθ′′(L)θ′′(0) according to the previous computations, and using that
θ′′(0)2 = θ′′(L)2, the condition (2.25) rewrites γ−Lγ = 1, which is not satisfied. The conclusion follows. �
Hence, at this step, we have the following array, summarizing the spectral properties of A:
Ae0 = λ0e0, e0 = sin θ, λ0 = −En
......
...Aen = λnen, en = cos θ, λn = −1 − En
......
...Aej = λjej , λj
...... ↓
−∞
Let us now perform the spectral analysis of the operator A defined by (2.20).
Spectral analysis of A. For every r =(
r1
r2
)∈ D(A) = D(A) × D(A), one has, from Proposition 2.3,
r1 =+∞∑j=0
r1jej , r2 =+∞∑k=0
r2kek.

312 Y. PRIVAT AND E. TRELAT
Hence
r =
⎛⎜⎜⎜⎜⎝
+∞∑j=0
r1jej
+∞∑k=0
r2kek
⎞⎟⎟⎟⎟⎠ =
+∞∑j=0
r1j
(ej
0
)+
+∞∑k=0
r2k
(0
ek
)=
+∞∑j=0
rj ej
where (ej)j∈IN is the orthonormal basis of L2(0, L; IR2) built from the orthonormal basis (ej)j∈IN of L2(0, L) bythe usual diagonal procedure used to establish the countability of IN2, that is:
e2j =
(ej
0
), e2j+1 =
(0
ej
),
for every j ∈ IN. Here, we have setrj = 〈r, ej〉L2(0,L;IR2),
for every j ∈ IN. It can be noted that
r2j = 〈r, e2j〉L2(0,L;IR2) = 〈r1, ej〉L2(0,L) = r1j ,r2j+1 = 〈r, e2j+1〉L2(0,L;IR2) = 〈r2, ej〉L2(0,L) = r2j ,
for every j ∈ IN. Moreover, we have
Ae2j =
((A + Id) A + En Id
−(A + Id) A + En Id
)(ej
0
)=
((λj + 1)ej
−(λj + 1)ej
)= (λj + 1)e2j − (λj + 1)e2j+1,
and
Ae2j+1 =
((A + Id) A + En Id
−(A + Id) A + En Id
)(0
ej
)=
((λj + En)ej
(λj + En)ej
)= (λj + En)e2j + (λj + En)e2j+1,
for every j ∈ IN. In other words, the operator A restricted to the two-dimensional space Span(e2j , e2j+1) isrepresented by the 2 × 2 matrix
Aj =
(λj + 1 λj + En
−(λj + 1) λj + En
)(2.26)
in the basis (e2j , e2j+1).We have thus obtained the following corollary.
Corollary 2.5. The operator A is diagonalizable in 2×2 blocks. More precisely in the orthonormal basis (ej)j∈IN
the operator A is represented by the infinite-dimensional matrix⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
A0 0 · · ·0 A1
. . .
0 0. . .
.... . . Aj
. . .
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
which is diagonal by 2 × 2 blocks Aj, where Aj is defined by (2.26).
Hence, in order to analyze the local stability of the steady-state M0 it suffices to analyze the spectrum of Aj .We have the following immediate lemma.

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 313
Lemma 2.6. The matrix Aj is Hurwitz if and only if λj < −1.
Recall that a matrix is said to be Hurwitz if all its eigenvalues have a negative real part.Since λ0 = −En and λj < −1 for every j � n, the following result follows (note here the importance of the
fact that −1 is not an eigenvalues of A, since the value −1 is a pivot value in the stability properties).
Corollary 2.7. Only the two trivial steady-states (2.2) are stable. Any other steady-state (2.3) is unstable forthe uncontrolled Landau–Lifschitz equation (1.6) (that is, with u = 0). More precisely, in the spectral expansionof Corollary 2.5, at most the 2n first equations are unstable and all others are locally asymptotically stable.
Remark 2.8. Actually the two trivial steady-states (2.2) are even globally stable since they make vanish theenergy defined by (1.2), which besides is nonincreasing according to (1.3).
3. Control and stabilization results
3.1. The main results
Theorem 3.1. If d3 �= 0 then every steady-state is locally exponentially stabilizable in H1 topology, for allvalues of 0 � a < b � L but a finite number of choices, by means of feedback controls that can be designed byusual pole-shifting from a finite-dimensional linear control system.
More precisely, let a ∈ (0, L) arbitrary and let �d = (d1, d2, d3)� ∈ IR3 be such that d3 �= 0. There exists afinite discrete set Z ⊂ (0, L) such that, for every b in (0, L) \ Z such that a < b, there exist a neighborhood Wof m in H1(0, L; IR3) and a smooth feedback control function u such that every solution mδ of (1.6) associatedwith this control, with initial condition in W, converges exponentially to m in H1 topology.
The strategy of the proof is the following. We consider the linearization of (1.6) around a steady-state, whichis given by (2.19). Using the spectral decomposition of (2.19) into an infinite number of two-dimensional systems,we isolate the n first (2×2 blocks) modes, which are known to contain all unstable modes, whereas all other onesare naturally stable. On the finite-dimensional linear control system containing all unstable modes, we verifythat, under a generic condition on the lengths of the solenoid, the Kalman condition holds true. Then usingthe pole-shifting theorem we design an explicit feedback control stabilizing exponentially this finite-dimensionalsystem, as well as an explicit Lyapunov function. Finally, we prove that this control stabilizes exponentially aswell the whole infinite-dimensional system, by constructing an appropriate Lyapunov function. Note that thislast part is nontrivial since the feedback controls built on the finite-dimensional subsystem could destabilizesome stable modes of the other infinite-dimensional part (also, the remainder terms have to be taken intoaccount), and the design of an appropriate Lyapunov function requires some care.
Remark 3.2. It can be noted that, with a little additional effort in the proof, one can establish a stabilizationresult in any topology Hs with s > 1.
Remark 3.3. It can be noticed that the feedback control u exhibited in the proof of Theorem 3.1 does notrequire the knowledge of the complete solution (t, x) �→ m(t, x) of the system (1.6), but only the knowledge ofa finite number of integral quantities of the kind
∫ b
a m(t, x)ej(x) dx, where (ej)j∈IN denotes the Hilbert basisintroduced in Proposition 2.3. This is physically more relevant, and the quantities that have to be measured aremoments of the magnetization field.
Remark 3.4 (on the robustness of the control). As noted in Remark 3.3, the control law we exhibit in theproof of Theorem 3.1 is constructed from the knowledge of several integral quantities. Practically speaking,these quantities are evaluated with the help of measurements which may be noised. However, since the strategyemployed here is based on the use of a Lyapunov function, it is actually robust. Moreover, the number of criticalvalues of the real number b for which the conclusion of this theorem does not hold true anymore is finite. Itallows to claim that the sensitivity of the control method presented in the proof of Theorem 3.1 with respectto all the parameters is minimal.

314 Y. PRIVAT AND E. TRELAT
Remark 3.5. It is important to stress that our result (asymptotic stabilization with a linear feedback) cannotbe established with a solenoid whose axis is parallel to the nanowire (that is, with d3 = 0). We will indeed provefurther that the Kalman condition is then never satisfied for the unstable finite-dimensional part of the system.
In [8] the authors consider the particular steady-state M0 with n = 1 (that is, with θ making half a periodin the phase portrait), with a = 0, b = L and d3 = 0, that is, with a coil rolling around the whole nanowireand having the same axis. They provide an explicit linear feedback control such that the closed-loop system isstable (but not asymptotically stable). More precisely, all local variables of the system around the steady-stateconverge locally exponentially, except the variable ω describing the rotation of the magnetization vector, whichis stable only.
For n > 1 and d3 = 0 it is not possible to stabilize asymptotically a nontrivial steady-state with a linearfeedback (since the Kalman condition is not satisfied) but the question is open to stabilize it with a nonlinearone, or to design a linear feedback making the closed-loop system stable as in [8].
The next result shows that it is always possible to steer the system from a steady-state to any other one,provided that they have the same level of energy θ′2 + cos2 θ = En.
Theorem 3.6. Under the generic assumptions of Theorem 3.1, given two steady-states
m1(x) =
⎛⎜⎝
cos θ(x)
cosω1 sin θ(x)
sin ω1 sin θ(x)
⎞⎟⎠ , m2(x) =
⎛⎜⎝
cos θ(x)
cosω2 sin θ(x)
sin ω2 sin θ(x)
⎞⎟⎠ ,
with ω1 ∈ IR, ω2 ∈ IR, for every ε > 0 there exist a time T > 0 and a controls u ∈ L2(0, T ) such that everysolution m of (1.6) satisfying
‖m(0, ·) − m1‖H1(0,L;IR3) � ε,
satisfies at time T‖m(T, ·) − m2‖H1(0,L;IR3) � ε.
Moreover this can be done with an explicit smooth feedback control that is built from a finite-dimensionallinear control system.
The strategy of the proof consists in stabilizing the system along a path of steady-states joining m1 andm2. Such a path exists whenever the two steady-states have the same level of energy. This strategy is inspiredby [11, 12] where it has been used in order to control semilinear heat and wave equations to steady-states.
Note that, of course, the approximate controllability result (in large time) claimed in Theorem 3.6 follows byusing repeatedly Theorem 3.1, by jumping from one neighborhood to the other along a path of steady-states.The strategy that we propose is however more direct and effective and consists of stabilizing a slowly-varyingin time finite-dimensional linear control system.
An interesting open question is to know whether or not it is possible to steer the system from a steady-stateto any other one, not necessarily having the same level of energy. The question is probably difficult and doesnot seem to be solvable with the above strategy, due to the fact that there does not seem to exist any path ofgeneralized steady-states (that is, steady-states with nonzero constant controls) joining m1 and m2.
Another interesting issue is to determine, whenever it exists, the location of the solenoid used as controlensuring optimal controllability properties.
3.2. Proof of the results
Let us first prove Theorem 3.1. Our objective is to design an explicit feedback control locally stabilizing thesystem (1.4) around a given steady-state (2.3) (note that the trivial steady-states (2.2) are stable so there isnothing to do).
We follow the steps described in the above strategy.

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 315
Consider a steady-state, assumed to be M0 without loss of generality, as in Section 2.2. Then, locally aroundM0, every solution m can be written as (2.18) in the frame (M0, M1, M2), and the Landau–Lifshitz equation isthen locally equivalent to (2.19).
Linearized system and spectral expansions. First of all, we consider the linearized system around M0, thatis (2.19) without the remainder term R(x, r, rx, rxx, u), which is
∂r
∂t= Ar + Bu, (3.1)
with A defined by (2.20) and B defined by (2.22). Using the spectral expansions developed in Section 2.3, andfollowing in particular the analysis made to derive Corollary 2.5, this system is equivalent to the series of linearautonomous control systems
ddt
(r1j(t)
r2j(t)
)= Ak
(r1j(t)
r2j(t)
)+ Bju(t), k ∈ IN (3.2)
(note that r1j(t) = r2j(t) and r2j(t) = r2j+1(t)), with
Aj =
(λj + 1 λj + En
−(λj + 1) λj + En
), Bj =
(∫ b
a(d3 − d1 sin θ(x))ej(x) dx∫ b
a (d3 + d1 sin θ(x))ej(x) dx
).
As explained above, we first focus on the n first systems of (3.2), which contain all unstable modes accordingto Corollary 2.7, and which can be written as the finite-dimensional linear autonomous control system in IR2n
run(t) = Aunrun(t) + Bunu(t), (3.3)
with
run(t) =
⎛⎜⎜⎜⎜⎜⎜⎜⎝
r10(t)
r20(t)...
r1n−1(t)
r2n−1(t)
⎞⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎝
r0(t)
r1(t)...
r2n−2(t)
r2n−1(t)
⎞⎟⎟⎟⎟⎟⎟⎟⎠
,
and
Aun =
⎛⎜⎜⎜⎜⎜⎜⎝
A0 0 · · · 0
0 A1. . .
......
. . .. . . 0
0 · · · 0 An−1
⎞⎟⎟⎟⎟⎟⎟⎠
and Bun =
⎛⎜⎜⎜⎜⎝
B0
B1
...
Bn−1
⎞⎟⎟⎟⎟⎠ . (3.4)
This is the first, finite-dimensional part, of the complete system (3.2), whereas the second (infinite-dimensional) part of it, containing only stable modes, is written as
rst(t) = Astrst(t) + Bstu(t), (3.5)
with
rst(t) =
⎛⎜⎜⎜⎜⎜⎜⎜⎝
r1n(t)r2n(t)
...r1j(t)r2j(t)
...
⎞⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎝
r2n(t)r2n+1(t)
...r2j(t)
r2j+1(t)...
⎞⎟⎟⎟⎟⎟⎟⎟⎠

316 Y. PRIVAT AND E. TRELAT
and
Ast =
⎛⎜⎜⎜⎜⎜⎝
An 0 · · ·0
. . . 0... 0 Aj
. . .. . . . . .
⎞⎟⎟⎟⎟⎟⎠ and Bst =
⎛⎜⎜⎜⎜⎝
Bn
...Bj
...
⎞⎟⎟⎟⎟⎠ . (3.6)
Note that
run(t) =2n−1∑j=0
rj(t)ej , rst(t) =+∞∑j=2n
rj(t)ej .
Stabilization of the unstable finite-dimensional part. Let us analyze the finite-dimensional linear autonomouscontrol system (3.3).
Lemma 3.7. Let a ∈ (0, L). Assume that d3 �= 0. There exists a finite discrete set Z ⊂ (0, L) such that, forevery b in (0, L) \ Z such that a < b, the pair (Aun, Bun) satisfies the Kalman condition, that is,
rank(Bun, AunBun, . . . , A2n−1un Bun) = 2n.
Proof. Let us diagonalize Aun in C by writing Aun = QDQ−1 with Q an invertible complex matrix of size 2nand D a diagonal matrix of size 2n whose diagonal is (μ0, ν0, . . . , μn−1, νn−1), where the pair (μj , νj) is thespectrum of Aj for every j. In other words, μj and νj are the two roots of the polynomial
πAj (X) = X2 − τjX + δj ,
where τj = 2λj +1+En and δj = 2(λj +1)(λj +En). In particular, since λ0 = −En, we have μ0 = 0, ν0 = 1−En.Noting that
rank(Bun, AunBun, . . . , A2n−1
un Bxun
)= rank
(Q−1Bun, DQ−1Bun, . . . , D2n−1Bun
),
and setting
Q−1Bun =
⎛⎜⎝
β1
...β2n
⎞⎟⎠ ,
we easily compute
rank(Bun, AunBun, . . . , A2n−1
un Bun
)= rank
(β1 0 · · · 0... Mβ
)
= rank
⎛⎜⎜⎜⎜⎜⎜⎜⎝
β1 0 · · · 0β2 ν0β2 · · · ν2n−1
0 β2
β3 μ1β3 · · · μ2n−11 β3
......
...β2n−1 μn−1β2n−1 · · · μ2n−1
n−1 β2n−1
β2n νn−1β2n · · · ν2n−1n−1 β2n
⎞⎟⎟⎟⎟⎟⎟⎟⎠
.
Identifying Vandermonde matrices inside the above matrix, we infer that this rank is equal to 2n if and onlyif the following three conditions are satisfied:
C1. ν0, μ1, ν1, μ2, ν2, . . . , μn−2, νn−2, μn−1, νn−1 are all distinct;

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 317
C2. βk �= 0 for every k ∈ {2, . . . , 2n};C3. β1 �= 0.
The end of the proof is devoted to prove that C1, C2 and C3 hold under the generic assumptions announcedin the statement of the lemma.
Condition C1. Fix j ∈ {0, · · · , n − 1} and recall that λj ∈ (−1, 0). Let us first prove that the roots of thepolynomial πAj are distinct. It is easy to establish that
supx∈[−1,0]
(x2 + (En + 1)x − (En − 1)2) � −(En − 1)2,
and therefore the equation λ2j +(1+En)λj − (En −1)2 = 0 cannot hold. In other words, the equation tr(Aj)2 =
4 det(Aj)2 cannot hold.It remains to prove that the roots of the polynomials πAk
are all pairwise distinct for k ∈ {1, · · · , n− 1}. Toprove that fact, we consider the resultant4 Res(πAj , πAk
) of πAj and πAk. We compute
Res(πAj , πAk) = det
⎛⎜⎝
1 0 1 0−τk 1 −τj 1δk −τk δj −τj
0 δk 0 δj
⎞⎟⎠ = 2(λj − λk)2(δj + δk),
and hence Res(πAj , πAk) �= 0 for all j, k ∈ {1, · · · , n − 1}. Hence C1 is true.
Condition C2. We compute explicitly
Q−1 =
⎛⎜⎝
Q−10 0
. . .0 Q−1
n−1
⎞⎟⎠ ,
where
Q−10 =
11 − En
(1 1−1 0
)and
Q−1k = − 1
(λk + En)(νk − μk)
(λk − νk −(λk + En)
μk − (λk + 1) λk + En
)for every k ∈ {1, · · · , n − 1}. Now, the condition C2 is not satisfied if and only if
2n∏i=2
βi = 0.
This equation yields an analytic constraint equation in b. Since the set of zeros of an analytic function over acompact interval is finite, we infer that, for all values of b such that a < b but maybe a finite number of them,the condition C2 is satisfied.
Condition C3. Easy computations show that
β1 =2d3
1 − En
∫ b
a
e1(x) dx, (3.7)
As previously, the quantity∫ b
a e1(x) dx do not vanish except maybe for a finite number of values of b and thenthe condition C3 is satisfied.
This finishes the proof of the lemma. �4Recall that the resultant of two polynomials is a polynomial expression of their coefficients, which is equal to zero if and only
if the polynomials have a common root.

318 Y. PRIVAT AND E. TRELAT
Remark 3.8. The formula (3.7) shows that, if the axis of the solenoid is parallel to the nanowire, that is, ifd3 = 0, then β1 = 0. Then the Kalman condition is never satisfied in this case. This justifies the contents ofRemark 3.5.
Remark 3.9. Let us stress once again the importance of the fact that −1 is not an eigenvalue of A (seeProp. 2.3). Indeed if −1 were to be an eigenvalue, then the conclusion of Lemma 3.7 would not hold trueanymore since the first and last rows of the Kalman matrix
(Bun, AunBun, . . . , A2n−1un Bun)
would be collinear. In such a case, it would have been necessary to have two solenoids (and hence two controls)instead of a single one in order to perform the same analysis and to get the same kinds of results.
Since the control system (3.3) satisfies the Kalman condition, we get the following corollary, as a consequenceof the pole-shifting theorem (see, e.g., [18, 26]).
Corollary 3.10. In the conditions of Lemma 3.7, there exists a 2 × 2n matrix K such that the matrix M =Aun + BunK is Hurwitz, and there exists a symmetric positive definite matrix P of size 2n such that
P�M + MP = −I2n. (3.8)
In particular this means that the feedback control
u(t) = Krun(t) (3.9)
stabilizes the finite-dimensional control system (3.3). Moreover, the functional
Vun(run) =12r�un P run
is a Lyapunov function for the closed-loop system
run(t) = (Aun + BunK)run(t).
Stabilization of the whole system. Let us prove that the feedback (3.9) stabilizes locally the whole infinite-dimensional system (2.19) with the remainder term R.
Using the notations introduced previously, run and rst are solutions of the infinite-dimensional system
run = (Aun + BunK)run + R1(x, r, rx, rxx, u),rst = Astrst + BstKrun + R2(x, r, rx, rxx, u), (3.10)
where
R =(
R1
R2
).
In order to prove the local asymptotic stability of this system yielding the desired stability property in H1
topology, we are going to design an appropriate Lyapunov function.First of all, since the 2 × 2 matrix Aj are Hurwitz for every j � n (see Lem. 2.6), and therefore, as in
Corollary 3.10, it follows from the well-known Lyapunov lemma that there exists a symmetric positive definitematrix Qj of size 2 such that
A�j Qj + QjAj = λjI2. (3.11)
Note the important fact that λj appears at the right-hand side of (3.11), with λj → −∞ as j tends to +∞.The term λj is a weight that will be important to get the stability property in H1 topology, combined with thefollowing also instrumental lemma.

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 319
Lemma 3.11. The matrices Qj are uniformly bounded.
Proof. Clearly the matrix
Qj = λj
∫ +∞
0
etA�j etAj dt
is a solution of the Lyapunov equation (3.11), and it easily follows from the structure of the matrices Aj andfrom the fact that λj → −∞ as j tends to +∞ that there exists C > 0 such that
etAj � Ceλj t
for every t � 0 and for every j ∈ IN. Therefore
‖Qj‖ � C|λj |∫ +∞
0
e2λjt dt =C
2,
as desired. �
We define the infinite-dimensional matrix
Qλ =
⎛⎜⎜⎜⎜⎜⎜⎜⎝
λnQn 0 · · ·
0. . . 0
... 0 λjQj. . .
. . . . . .
⎞⎟⎟⎟⎟⎟⎟⎟⎠
, (3.12)
and we define the functional
V(r) =c
2r�un P run +
12r�st Qλ rst (3.13)
=c
2r�un P run +
12
+∞∑j=n
|λj |(r2j r2j+1
)Qj
(r2j
r2j+1
)(3.14)
for every r ∈ H1(0, L; IR2), where c > 0 will be chosen large enough.
Lemma 3.12. There exist C1 > 0 and C2 > 0 such that
C1‖r‖2H1(0,L;IR2) � V(r) � C2‖r‖2
H1(0,L;IR2),
for every r ∈ H1(0, L; IR2). In other words the norm√V(r) is equivalent to the H1 norm.
Proof. We denote by ∼ the equivalence of norms. Since P is symmetric positive definite, it is clear that
(r�un P run)1/2 ∼ ‖run‖ =
⎛⎝2n−1∑
j=0
r2j
⎞⎠
1/2
in the finite-dimensional space IR2n. Besides, by definition of the operator A, one has
〈−Af, f〉L2(0,L) =∫ L
0
(f ′(x)2 + 2 cos2 θ(x) f(x)2) dx

320 Y. PRIVAT AND E. TRELAT
and then clearly (〈−Af, f〉L2(0,L)
)1/2 ∼ ‖f‖H1(0,L).
It follows easily that
‖r‖H1(0,L;IR2) ∼⎛⎝+∞∑
j=0
|λj |(r22j + r2
2j+1
)⎞⎠1/2
.
Therefore it suffices to prove that
⎛⎝+∞∑
j=n
|λj |(r2j r2j+1
)Qj
(r2j
r2j+1
)⎞⎠1/2
∼⎛⎝+∞∑
j=n
|λj |(r22j + r2
2j+1
)⎞⎠1/2
.
But this follows from the fact that the matrices Qj are uniformly bounded. �
Remark 3.13. Note that, similarly,
‖r‖H2(0,L;IR2) ∼⎛⎝+∞∑
j=0
λ2j
(r22j + r2
2j+1
)⎞⎠1/2
.
Let r be a solution of (3.10). Using (3.8) and (3.11), we compute
ddt
V(r(t, ·)) = −c‖run(t)‖2IR2n) −
+∞∑j=n
λ2j
(r22j + r2
2j+1
)(3.15)
+r�un P R1 + r�stQλBstKrun + r�stQ
λR2. (3.16)
We have
‖Qλrst‖2 � C3
+∞∑j=n
|λj |(r22j + r2
2j+1
),
for some constant C3 > 0, and hence using Young’s inequality and the fact that |λj | � λ2j as j tends to +∞ it
follows that there exists C4 > 0 such that
∣∣r�stQλBstKrun
∣∣ � C4‖run(t)‖2IR2n) +
12
+∞∑j=n
λ2j
(r22j + r2
2j+1
). (3.17)
Now, choosing c > 0 large enough (for instance, c > 2C4), we infer from Remark 3.13, from (3.15) and (3.17)that there exists C5 > 0 such that
ddt
V(r(t, ·)) � −C5‖r(t, ·)‖2H1(0,L;IR2) − C5‖r(t, ·)‖2
H2(0,L;IR2)
+C5‖r(t, ·)‖H1(0,L;IR2)‖R‖L2(0,L;IR2). (3.18)

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 321
It follows from the estimate (2.23) of the remainder term R that
‖r(t, ·)‖H1(0,L;IR2)‖R‖L2(0,L;IR2) � C
(‖r(t, ·)‖2
L2(0,L;IR2)‖r(t, ·)‖H1(0,L;IR2)‖r(t, ·)‖H2(0,L;IR2)
+ ‖r(t, ·)‖L2(0,L;IR2)‖r(t, ·)‖2H1(0,L;IR2)
+ ‖r(t, ·)‖L2(0,L;IR2)‖r(t, ·)‖3H1(0,L;IR2)
+ ‖r(t, ·)‖2L2(0,L;IR2)‖r(t, ·)‖H1(0,L;IR2)
)
� C
(‖r(t, ·)‖3
H1(0,L;IR2)‖r(t, ·)‖H2(0,L;IR2)
+2 ‖r(t, ·)‖3H1(0,L;IR2) + ‖r(t, ·)‖4
H1(0,L;IR2)
).
Here, we need an a priori argument: as long as V(r(t, ·)) remains small enough, or equivalently as long as‖r(t, ·)‖H1(0,L;IR2) remains small enough (which will be verified a posteriori), we can write
‖r(t, ·)‖2H1(0,L;IR2) � ‖r(t, ·)‖H1(0,L;IR2),
and hence, using again Young’s inequality, it follows that there exists C6 > 0 such that
C5‖r(t, ·)‖H1(0,L;IR2)‖R‖L2(0,L;IR2) � C5
2‖r(t, ·)‖2
H2(0,L;IR2) + C6
√V(r(t, ·))‖r(t, ·)‖2
H1(0,L;IR2). (3.19)
Therefore, from (3.18) and (3.19) we infer that
ddt
V(r(t, ·)) � −(C5 − C6
√V(r(t, ·))
)‖r(t, ·)‖2
H1(0,L;IR2) −C5
2‖r(t, ·)‖2
H2(0,L;IR2)
� −(C5 − C6
√V(r(t, ·))
)‖r(t, ·)‖2
H1(0,L;IR2),
and hence, as long as V(r(t, ·)) remains small enough (here, we need for instance the a priori estimateC6
√V(r(t, ·)) < C5/2), we have, using Lemma 3.12,
ddt
V(r(t, ·)) � −C7V(r(t, ·)). (3.20)
It follows that V(r(t, ·)) decreases exponentially. This shows that the above a priori estimates are valid,provided that V(r(0, ·)) is small enough.
This proves the local stability result in H1 norm claimed in Theorem 3.1.Sketch of proof of Theorem 3.6. Considering m1 and m2 as in the statement of Theorem 3.6, it is clear that
m(τ, x) =
⎛⎜⎝
cos θ(x)
cos((1 − τ)ω1 + τω2) sin θ(x)
sin((1 − τ)ω1 + τω2) sin θ(x)
⎞⎟⎠ ,
with 0 � τ � 1, yields a path of steady-states joining m1 to m2. The strategy developed in [11, 12] consists oftracking the path m(εt, ·) for some ε > 0 small enough. The role of ε is to slow down the time so that, whenlinearizing (1.6) along the path, we get a slowly-varying in time linear control system.
We do not give all details since the proof is then very similar to the one written previously. We only underlinethe slight differences in every step.

322 Y. PRIVAT AND E. TRELAT
The first step consists of writing the linearized system. The resulting linear system is still of the form (3.1).Note that, since every steady-state m(τ, ·) is the image of M0 by the rotation with axis e1 and angle ω, thelinearized system around m(τ, ·) is as well obtained by rotation of the linearized system around M0. The spectralproperties are the same.
An important point to be underlined is the following, and here appears the crucial role of ε. The resultingfinite-dimensional system, containing all unstable modes, is of the form
Y (t) = Aun(εt)Y (t) + Bun(εt)u(t),
and the Kalman condition holds for the pair (Aun(τ), Bun(τ)) for every τ ∈ [0, 1]. If ε were taken equal to 1,then the Kalman condition could fail to imply the desired stabilization result (as is well-known, see [18]). Thisimplication is however recovered for slowly-varying in time linear systems. Hence if one takes ε > 0 small enoughthen we get a statement similar to Corollary 3.10, with matrices that depend on εt. The feedback that we designis therefore of the form u(t) = K(εt)run(t).
Then the stabilization of the whole system follows the same lines as before, with the difference that theequations (3.10) involve one additional remainder term, which is of the order of ε and which comes from thederivative in time of m(εt, ·). This additional term is then recovered at the right-hand side (3.20), and thismeans that V(r(t, ·)) may not decrease exponentially but anyway we get that V(r(1/ε, ·)) is of the order of ε,which yields the desired result.
References
[1] D.A. Allwood et al., Submicrometer ferromagnetic NOT gate and shift register. Science 296 (2002) 2003–2006.
[2] F. Alouges and A. Soyeur, On global weak solutions for Landau–Lifshitz equations: existence and nonuniqueness. NonlinearAnal. 18 (1992) 1070–1084.
[3] D. Atkinson et al., Magnetic domain-wall dynamics in a submicrometre ferromagnetic structure. Nature Mater. 2 (2003) 85–87.
[4] G.S.D. Beach, C. Nistor, C. Knutson, M. Tsoi and J.L. Erskine, Dynamics of field-driven domain-wall propagation in ferro-magnetic nanowires. Nature Mater. 4 (2005) 741–744.
[5] F. Brown, Micromagnetics. Wiley, New York (1963).
[6] G. Carbou and S. Labbe, Stability for walls in ferromagnetic nanowire. Discrete Contin. Dyn. Syst. Ser. B 6 (2006) 273–290.
[7] G. Carbou and P. Fabrie, Regular solutions for Landau–Lifshitz equation in R3. Commun. Appl. Anal. 5 (2001) 17–30.
[8] G. Carbou and S. Labbe, Stabilization of walls for nanowires of finite length. ESAIM: COCV 18 (2012) 1–21.
[9] G. Carbou, S. Labbe and E. Trelat, Control of travelling walls in a ferromagnetic nanowire. Discrete Contin. Dyn. Syst. Ser.S 1 (2008) 51–59.
[10] G. Carbou, S. Labbe and E. Trelat, Smooth control of nanowires by means of a magnetic field. Commun. Pure Appl. Anal. 8(2009) 871–879.
[11] J.-M. Coron and E. Trelat, Global steady-state controllability of 1-D semilinear heat equations. SIAM J. Control Optim. 43(2004) 549–569.
[12] J.-M. Coron and E. Trelat, Global steady-state stabilization and controllability of 1-D semilinear wave equations. Commun.Contemp. Math. 8 (2006) 535–567.
[13] A. De Simone, H. Knupfer and F. Otto, 2 − d stability of the Neel wall. Calc. Var. Partial Differ. Equ. 27 (2006) 233–253.
[14] Y. Egorov and V. Kondratiev, On spectral theory of elliptic operators. Birkhauser (1996).
[15] J. Grollier et al., Switching a spin valve back and forth by current-induced domain wall motion. Appl. Phys. Lett. 83 (2003)509–511.
[16] A. Hubert and R. Schafer, Magnetic domains: the analysis of magnetic microstructures. Springer-Verlag (2000).
[17] R. Ignat and B. Merlet, Lower bound for the energy of Bloch Walls in micromagnetics. Arch. Ration. Mech. Anal. 199 (2011)369–406.
[18] H.K. Khalil, Nonlinear Systems. Macmillan Publishing Company, New York (1992).
[19] S. Labbe, Y. Privat and E. Trelat, Stability properties of steady-states for a network of ferromagnetic nanowires. J. Differ.Equ. 253 (2012) 1709–1728.
[20] L. Landau and E. Lifshitz, Electrodynamics of continuous media, Course of theoretical Physics. Vol. 8. Translated from therussian by J.B. Sykes and J.S. Bell. Pergamon Press, Oxford-London-New York-Paris, Addison-Wesley Publishing Co., Inc.,Reading, Mass (1960).
[21] C. Melcher, Global solvability of the Cauchy problem for the Landau–Lifshitz-Gilbert equation in higher dimensions. IndianaUniversity Math. J. 61 (2013) 1175–1200.
[22] C. Melcher and M. Ptashnyk, Landau–Lifshitz-Slonczewski equations: global weak and classical solutions. SIAM J. Math.Anal. 45 (2013) 407–429.

CONTROL AND STABILIZATION OF STEADY-STATES IN A FINITE-LENGTH FERROMAGNETIC NANOWIRE 323
[23] T. Ono et al., Propagation of a domain wall in a submicrometer magnetic wire. Science 284 (1999) 468–470.
[24] S. Parkin et al., Magnetic domain-wall racetrack memory. Science 320 (2008) 190–194.
[25] D. Sanchez, Behaviour of the Landau–Lifshitz equation in a periodic thin layer. Asymptot. Anal. 41 (2005) 41–69.
[26] E. Trelat, Controle optimal (French) [Optimal control], Theorie & applications [Theory and applications]. Math. Concretes[Concrete Mathematics]. Vuibert, Paris (2005).
[27] M. Tsoi, R.E. Fontana and S.S.P. Parkin, Magnetic domain wall motion triggered by an electric current. Appl. Phys. Lett. 83(2003) 2617–2619.
[28] A. Visintin, On Landau–Lifshitz equations for ferromagnetism. Japan J. Appl. Math. 2 (1985) 69–84.
[29] A. Zettl, Sturm–Liouville theory. Vol. 121 of Math. Surveys & Monographs. AMS, Providence (2005).