Xerographic Printing Robust Control and Diagnostic ...lixxx099/papers/NIP16-ppt.pdf · 1...
44
1 Mechatronics and Intelligent Machines Laboratory M..E., University of Minnesota Robust Control and Diagnostic Strategies for Xerographic Printing Robust Control and Diagnostic Strategies for Xerographic Printing Perry Y. Li Department of Mechanical Engineering University of Minnesota Minneapolis MN 55455 [email protected] http://www.me.umn.edu/~pli/
Transcript of Xerographic Printing Robust Control and Diagnostic ...lixxx099/papers/NIP16-ppt.pdf · 1...

1Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Robust Control and Diagnostic Strategies forXerographic Printing
Perry Y. LiDepartment of Mechanical Engineering
University of MinnesotaMinneapolis MN 55455
[email protected]://www.me.umn.edu/~pli/

2Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Outline
• Background and Motivation
• Robust TRC control problem
• Bayesian Network Modeling
• Conclusions

3Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Acknowledgements
• Collaborative work with• S. Dianat, Rochester Institute of Technology• Leon Zhong, U. of Minnesota
• Support from Document Company, Xerox• through the Xerox University Affair Council Grant

4Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Xerographic Process
• Charge
• Expose
• Develop
• Transfer
• Fuse
Electrostatics Mechanical Electrical Optics Software
Interdisciplinary:

5Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Robustness IssuesXerographic Image Output Terminal
• is complicated• involves many physical processes in various disciplines
• physical processes e.g. electrostatics based ones, are affected by• materials: toner and P/R• environment: temperature and humidity• machine variations: critical dimensions• cleanliness: dirt accumulation on charging wire
• larger scale variations• system faults• component degradation

6Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Objectives for Control Engineers• Manage printing process so that printer works well despite
• disturbances and faults
Imageprocessing
PhysicalMarking
disturbance
output
• Adjust image processing unit
• Adjust physical marking process

7Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Strategy 1: StabilizationMinor Disturbances and Plant Variations
• Stabilization strategy• No need to know source
of disturbance• Does not explicitly
construct system’s health• Printer remains on-line
• Challenges:• Identify actuators and sensors• Formulate control problem• Design / analyze control
algorithm
Imageprocessing
PhysicalMarking
disturbance
output
Controller
Stabilization of Tone Reproduction Curves

8Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Strategy #2: Diagnostics BasedFaults and Component Degradations
Explicitly diagnose faults / system’s state of degradations• Active testing• Reconfigure for degraded operation• Repair• Temporarily off-line
Benefits• Extend system’s use
despite faults• otherwise machine just
shuts down• Shorter / no service calls
Imageprocessing
PhysicalMarking
disturbance
Controller
Diagnostics
TestingReconfigure
Service/RepairBayesian Network Based DiagnosticsBayesian Network Based Diagnostics
output input

9Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Rest of this talk ….
• Stabilization of tone reproduction curves• For details, see: Li and Dianat, Proceedings of IEEE International
Conference on Controls Applications (Sept. 1998). Also to appear in theIEEE Transactions on Control Systems Technology.
• Bayesian network based diagnostics• For details, see: Zhong and Li, Proceedings of the ASME IMECE,
Dynamic Systems and Control Division - 2000. Volume 1.

10Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Tone Reproduction Curves
• TRC: Tone-in Tone-out; Ideally: TRC(tone-in) = tone-in
Color image separation
Half-toning
Half-toning
Half-toning
Xerographicmarking
Register and FuseHalf-toning
Tone Reproduction
Curve
Tone Reproduction
Curve
Tonein Half-toning
Xerographicmarking
Filter(A/C)
Toneout
half-tone half-toneCon-tone
Con-tone !
Con-tone

11Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Identifying Sensors and Actuators
Actuators• Grid voltage• Laser power• Development bias voltages
Sensors• Monochrome sensorpatches• Area coveragesensors

12Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
• TRC is a transformation
• Space of all TRC is potentially infinite dimension:• Discretize tones into 8 bits, i.e. p=256 tones• TRC is a p-dimensional
• Few actuators about 3 to 5• Few sensors ( less than 5 sensor patches / belt cycle)
• samples TRC
TRC Stabilization - Problem Formulation
]1,0[]1,0[: →TRC
Tonein Half-toning
Xerographicmarking
Filter(A/C)
Toneout
Ton
e -o
u t
actual TRC
desired TRC
measured tones
Tone -in

13Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
TRC Control Problem
Features:• Nonlinear• Disturbances• Uncertain models
- actuatorsd(k) - disturbances
- measured tones
Manipulate actuators settings based on TAC sensor measurements so that TRC (as a function) is close to the identity / nominal
Manipulate actuators settings based on TAC sensor measurements so that TRC (as a function) is close to the identity / nominal
))(),(( kdkuTRC Φ=
�
������
�
�
=
)),(),((
)),(),(()),(),((
2
1
ptonekdku
tonekdkutonekdku
φ
φφ
�
�
))(),(( kdkuCy Φ⋅=
)(ku
)(ky

14Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
• Use same number of inputs and measurements• Design cares only about measured tones• Theoretically can ensure measured tones to conform perfectly
Issues:• Accurate control at measured tones• Poor response at unmeasured tones• Model uncertainty can cause
stability issues
Integral Control method (not recommended)
tone
area
cov
erag
e
actual TRC
desired TRC
measured tones
Plantcontroller+
-
r(k) y(k)
Make y(k) close to r(k)

15Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
“Curve fitting” approach• “Select” actuator settings such that the actual TRC is close to the
desired TRC all ALL tones:
• Unmeasured tones must be filled in from model information
• Incorporate possible effects of• disturbances and plant uncertainty
[ ]2
1)( )()),(),(())(( min
=
−=p
iidiku toneTRCtonekdkuTRCkuJ
Ton
e -o
u t
actual TRC
desired TRC
measured tones
Tone -in

16Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Modeling
• Essentially static system• Nominal linear plant model - factorial experiments• Effects of unknown disturbances and uncertainty• Nonlinearity captured by uncertainty
[ ] )()(ˆ)()( kuWkIkdke ud ⋅∆+⋅+⋅= φφ
)()( keCky ⋅=)(k∆
P11 P12 P13
P21 P22 P23
P33P32P31
K(z)
d(k)e(k)
y(k)
• k=1,2,…., time sample index• e(k) = TRC error (p-dim), p-large• y(k) = TRC error at measured tones
(n-dim), n-small• u(k) = control deviation from nominal
(m-dim), m-small
Plant uncertainty
controller
u(k)

17Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Nominal Model

18Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Robust TRC Control• Minimize effects of d(k) on e(k)
• since d(k) and arbitrary,minimize worst case
• equivalent to minimizing inducednorm
• Robust static performance• disturbance and uncertainty
slowly varying
• What is a good controller ?• Define steady state performance:
• Design D.C. gain of controller tominimize
)(k∆
P11 P12 P13
P21 P22 P23
P33P32P31
K(z)
d(k)e(k)
y(k) u(k)
∞∞∞∞ ⋅∆=⋅ dKFeWe ),(
��
�
��
��
�
∆= ∞∞
≤∆
∞
∞
),(:min:)( sup1
KFK
γ
γγ
)( ∞Kγ
Closed loop system
LFT
)(k∆

19Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Two step control design method• Step 1: Find optimal D.C. gain
• Static (relative to dynamic) robust control problem is convex• Unique optimal D.C. gain can be found by solving Linear Matrix
Inequalities
• Step 2: Design controller so that it is causal• y(k) cannot be sensed until u(k) is issued• u(k) must only depend on y(k-1), y(k-2) etc.
• Choose dynamic controller with optimal D.C. gain
• Eigen-values of A chosen for noise immunity
)()( kyKku ⋅= ∞
)()()1( kyBkuAku ⋅+⋅=+

20Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Simulation results: Steady state response
Worst case disturbance for robust controller Worst case disturbance for integral controller

21Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Simulations: Dynamic Responses
Effect of dynamicdisturbances
Effect of measurement
noise

22Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Experimental Result
• Target = nominal - tone* slope• Slope = 0.02

23Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
3 Patch Integral Control• 3-I-3-O Integral Control• Measurements at
tt = 5, 17, 30• blows up after 1st cycle
Diagnosis:• Sensitivity matrix is very ill
conditioned:-0.2702 0.1402 0.1822-0.3818 0.1991 0.2837
-0.2420 0.1292 0.2323
svd = [ 0.7205 0.0436 0.0002]

24Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Bayesian Network Based Diagnostics• Explicit determination of
fault conditions and state ofmachine
• Inference based onparsimonious sensors
• Diagnostic problem:• Determine a set of fault
state / state of componentdegradation that canexplain observations
Imageprocessing
PhysicalMarking
disturbance
Controller
Diagnostics
TestingReconfigure
Service/Repair

25Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
M
C2 C1
C3
C0 C a*
C2 C1 C3
b*
Perceptually Non-Uniform
Perceptually nearly uniform CIELAB
Reconfiguration example:Color Management
Scenario:• Cyan capability is reduced
• e.g. due to reduced Cyanlaser power
• Problem diagnosed
Reconfiguration:• Compute optimal color
projection• Device specific!
desired

26Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Desired = [150, 150, 125]
Uncompesnated = [135, 150, 125]
Optimized = [135,142, 118]
Desired = [220, 80, 100]
Uncompensated = [210, 80, 100]
Optimized = [210, 74, 92],
Desired UnchangedAdjusted
Uncompensated
Desired UncompensatedOptimized
Optimized
Desired
Optimized
Uncompensated1.20=∆E
02.0=∆E
4.17=∆E
01.0=∆E

27Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Other utilities of Diagnostics• Optimize diagnostic tests
• Which tests to perform ?• Will new information be
important?
• Repair:• Which component is the culprit?
• Do I have enough information?
• Rank competing diagnosis
Imageprocessing
PhysicalMarking
disturbance
Controller
Diagnostics
TestingReconfigure
Service/Repair

28Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Bayesian Belief Network (BBN) ApproachProbabilistic approach• Captures and make inference
based on joint probabilities ofvariables that describe machine
• Ai = variables of components,• e.g. voltages, parameters etc.
• If Obs={observed variables} isobserved, what is the state of Bj?
• Compute P(Bj | Obs)
• Bayes rule
Imageprocessing
PhysicalMarking
disturbance
Controller
Diagnostics
TestingReconfigure
Service/Repair
),,,( 321 �AAAP

29Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Benefits of Probabilistic Approach• Rank non-unique competing
diagnosis
• Provides confidence level (50%probability or 98% probability)
• Test utility of diagnostics tests:
• I(T) = information of test• W(T) = expected performance
improvements• C(T) = cost of test
Imageprocessing
PhysicalMarking
disturbance
Controller
Diagnostics
TestingReconfigure
Service/Repair
)()()()( TCTWTITV −+=

30Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Issues in using probabilistic approach• Complexity in computation and storage
• is high dimensional
• n - variables, each has ‘p’ possible states: dimensional
),,,( 321 �AAAP
np
• Bayesian network:• compact representation of joint representation• exploit causal structure of problems• store and compute based on conditional probabilities (that involves few
nodes)• manageable in large problems

31Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Bayesian Network Model• Directed acyclic graph (DAG) of
variables
• To each Variable A with Parents B1,B2,..., Bn , associate a conditionalprobability table P( A | B1 ...Bn )
• Ancestor node: Prior probabilities• P(A), P(C)
• Joint probability can be obtainedfrom conditional probabilities:
P ( A1, A2, … , As ) ))(|(1 ii
s
iAparentsAP
=Π=
A
B
C
D
P(D | A, B,C)
P(B|A)
Hence, given BBN, one can do everything as if joint probability is known

32Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
BBN Example: Wet grass• Holmes grass is wet.• Is it due to
• rain (R)• or sprinkler (S) ?
• Storage• BBN - 12 numbers• P(R, S, H, W) - 16
R
HW
S
P(R) = (0.2, 0.8), P(S)= (0.1,0.9)
R = y R = nW = y 1 0.2W = n 0 0.8
P( W | R )
R = y R = nS = y ( 1, 0 ) ( 0.9, 0.1 )S = n ( 1, 0 ) ( 0, 1 )
P( H | R, S )
Binary nodes : true or false
• Evidence: H = y• P( R=y | H=y ) = 0.736 ,
P( S=y|H=y ) = 0.339
• More evidence:• Watson’s grass is also wet (W = y)• P( R=y | H=y,W=y) = 0.93 ,
P( S=y|H=y,W=y ) = 0.161

33Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Simple BBN Model of Xerographic Process• Simple model to illustrate principles• Monochrome solid color
• Vs - charged voltage• Vp - exposed voltage• DMA - developed mass density
• Di - desired input tone• Do - output print density
• Vs, Vp, DMA - observed variables• Vg, Po, Vb - control variables

34Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Color Printing Process
Ci Co
Mi Mo
Yi Yo
Ki Ko
Fuse
Cyan
Magenta
Yellow PrintingSubsystem
Black PrintingSubsystem
InputOutput
A series of monochromatic printing sub-processes• concatenate several monochrome BBN
Color Printing Process

35Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
BBN Model construction procedure• Define continuous BBN model based on physical model
• e.g.
• Assign probability distributions based on uncertainties in mathematicalmodels
• Define prior probabilities of ancestor nodes• Actuator variables have narrow distributions
• Discretization of BBN model• e.g.
• Implementation in HUGIN software
]8.2,0[∈A
{ }highmediumlowA ,,∈

36Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
• Physical model (Schein 92):
• Uncertainty in mathematical model:
where
• N(mean , variance) = Gaussian distribution
• Model from experiments• Failure data from field
Charging Subsystem Example
v
Vs
Vi CI0Vg
)/exp()]/exp(1[ 00 CvVIVCvVIVV giggs −+−−=
]),,,,,([),,,,|( 00 sgigis ICVVfNICVVVp σνν =
)/exp()]/exp(1[),,,,( 000 CvVIVCvVIVICVVf gigggi −+−−=ν

37Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
-50 -40 -30 -20 -10 0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Discretization of BBNWhy?Why?• Nodes can take on continuous range
of values• Cannot implement continuous BBNs
with arbitrary conditional probabilities• High computational cost
How?How?• Divide value range into “n” intervals
• How to partition ?
Prior probability, P(A), of node A
A
P(A
)
38Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
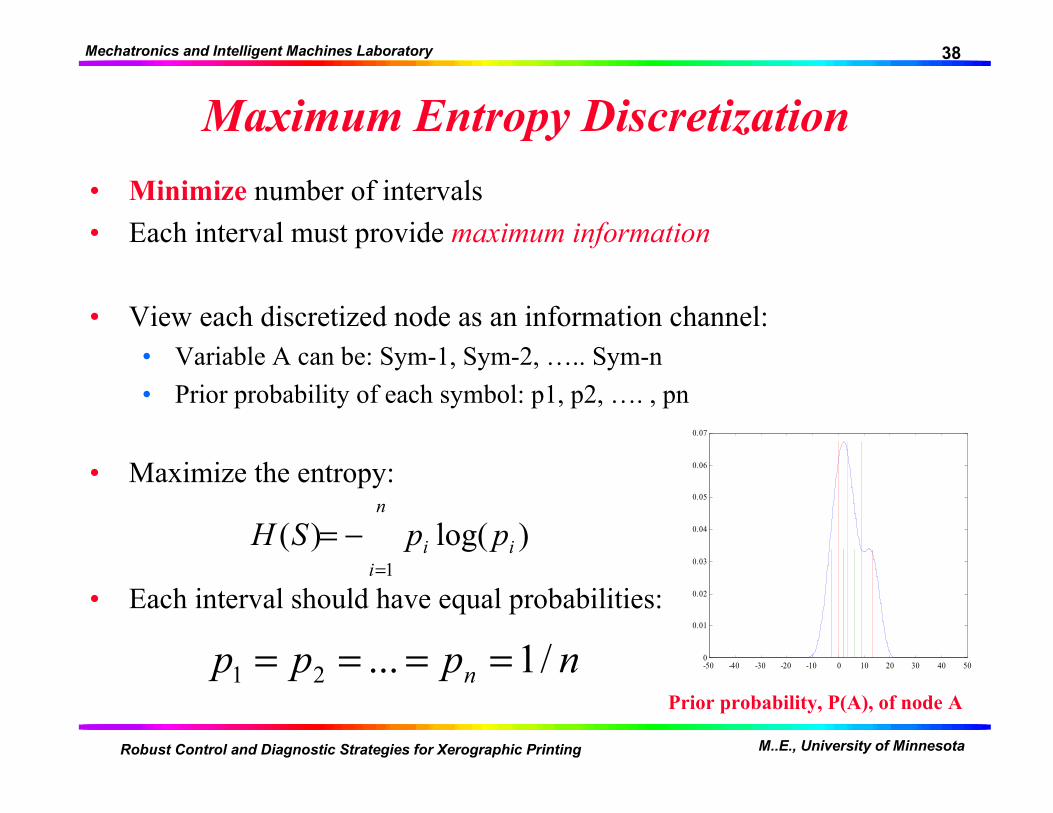
Maximum Entropy Discretization• Minimize number of intervals• Each interval must provide maximum information
• View each discretized node as an information channel:• Variable A can be: Sym-1, Sym-2, ….. Sym-n• Prior probability of each symbol: p1, p2, …. , pn
• Maximize the entropy:
• Each interval should have equal probabilities:=
−=n
iii ppSH
1)log()(
nppp n /1...21 ==== -50 -40 -30 -20 -10 0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Prior probability, P(A), of node A

39Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Discretization flowchartGet the node
to be discretized
Parent nodes discretized?
Yes
Segmentation
Joint Probability of parents
End
Conditional Probability
Parent nodesindependent?
Yes
NoMarginalization
Has parents?
Yes
No
Has parents?Yes
No
No
BA
C E
D
• Recursive algorithm• Checks independence• Group nodes to increase
efficiency
• Implemented in Matlab

40Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Discretization ProcedureDiscretization(Node node)
If node is top-level ancestor node
Segment node’s range and get the controids
Else if node is a node with parents
For each node, pr_node in the list of its parent nodes
If pr_node has not been discretized
Discretization (pr_node)
EndEnd If node is a node with parents
Acquire the joint probability table of node’s parent nodes
Approximate the continuous probability distribution of node
Segment node’s range and get the controids
Calculate the discretized conditional probability, P(node | node’s parents )
EndEnd
BA
C E
D

41Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Implementation on HUGIN• HUGIN - commercial software for BBNs• Performs inferences and probability updates as evidence is introduced• Uses discrete nodes (restricted continuous nodes)• Efficient updates (junction tree method)• Discretization algorithm writes to HUGIN readable format

42Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
BBN Prediction Example: TRC• Run BBN forward• Provide actuator values and various input tones• Observe probability distribution of output tones• Probabilistic Tone Reproduction Curve
L ML M MH HL
MH-
0.2000
0.4000
0.6000
0.8000
1.0000
Probability
Input Density
Output Desity
Input and Output Density
LMLMMHH

43Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Inference example: Print quality diagnostics•• Run BBN backwards (inference)Run BBN backwards (inference)SenarioSenario
• An image with moderate density ( Di=”M” ) is to be printed• Actual print is denser than desired, ( DMA = “H”)
DiagnosisDiagnosis• Evidence: Di=”M”, DMA = “H”:
• 1) Toner charge (Q) is low with probability 0.61• 2) Laser power (Po) is low with probability 0.69
• More test: check laser power• Evidence: Laser power is normal,
• Tribo (Q/M) is low with probability of 0.98• check developer

44Mechatronics and Intelligent Machines Laboratory
M..E., University of MinnesotaRobust Control and Diagnostic Strategies for Xerographic Printing
Conclusions• Two strategies to manage disturbances / faults• Stabilization of Tone Reproduction Curves
• potentially high dimension• small number of actuators and sensors• uncertainties, disturbances etc.• “curve fitting” approach
• Diagnostic framework for Xerographic printing:• Probabilistic framework• Bayesian Belief Network (BBN) approach
• compact representation• Continuous BBN from physics• Maximum entropy automatic discretization• Demonstrated approach
• more realistic model, field data etc. neededT
one
-ou t
actual TRC
desired TRC
measured tones
Tone -in