Web viewThe word “rigid” means that the distances , , , etc. that locate each particle ,...

If you can't read please download the document
Transcript of Web viewThe word “rigid” means that the distances , , , etc. that locate each particle ,...
Rotational Dynamics
Additional Practice Problems
AP Physics 1
Kuffer
Unit 5 Circular Dynamics and Simple Harmonic Motion
Homework Outline
Due
Topic
Book
Section(s)
Assignment
Video(s)
Date
Class #
73
Rolling Motion
8.6 & 8.7
Read/recall
75
Torque
9.1
Vector Cross Product Worksheet
FOC: 1 P: 3-5, 7-8, 10
5.1-5.2
78
Rigid Objects in Equilibrium (Statics)
Center of Gravity
9.2
9.3
FOC: 3, 6, 8 P: 11-13, 16, 18, 20-21,23-25, 27, 30
5.3-5.7
81
Newtons Second Law for Rotation
9.4
FOC: 10, 12, 13
P: 31-33, 35, 38-41, 43-47
5.8-5.9
82
Rotational Work and Energy
9.5
FOC: 16 P: 48-49, 51-55, 57-58
5.10
84
Angular Momentum
9.6
FOC: 17-18 P: 59, 61, 64-67
5.11
87
Simple Harmonic Motion & Unit Circle
10.2
FOC: 3-4 P: 15-18, 20-23
5.12-5.13
88
Energy of Simple Harmonic Motion
10.3
FOC: 11, 13 P:27-29, 31-32, 34
5.14-5.15
89
The Pendulum
10.4
FOC: 14 P: 43-45, 48-49
5.16
I. Rotational vs Translational (9.1)
II. Torque on Rigid Bodies (9.1)
(9.1)
Direction:The torqueis positive when the force tends to produce a counterclockwise rotation about the axis, and negative when the force tends to produce a clockwise rotation.
SI Unit of Torque:
Equation 9.1 indicates that forces of the same magnitude can producedifferenttorques, depending on the value of the lever arm.
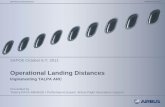
In this top view, the hinges of a door appear as a black dot () and define the axis of rotation. The line of action and lever armare illustrated for a force applied to the door (a) perpendicularly and (b) at an angle. (c) The lever arm is zero because the line of action passes through the axis of rotation
Note: The lever arm (l) is perpendicular to the Force (line of action)
III. Equilibrium of a Rigid Body (9.2)
A rigid body is in equilibrium if it has zero translational acceleration and zero angular acceleration. In equilibrium, the sum of the externally applied forces is zero, and the sum of the externally applied torques is zero:
(4.9a and 4.9b)
(9.2)
The reasoning strategy for analyzing the forces and torques acting on a body in equilibrium is given below. The first four steps of the strategy are essentially the same as those outlined in Section 4.11, where only forces are considered. Steps 5 and 6 have been added to account for any external torques that may be present. Example 3 illustrates how this reasoning strategy is applied to a diving board.
Physics Web Quest: TorqueName ________________________
Click on Torque Simulator on Mr. Neffs website. (http://phet.colorado.edu/simulations/sims.php?sim=Torque )
Part I: Torque
1. Click the tab at the top that says torque
2. Set the force equal to 1 N.
3. Click Go let this run for at least 10 seconds
4. What is the torque on the wheel (include direction).
5. What eventually happens to the lady bug? _______________________________
6. From Newtons second law, a force will cause an __________________________
7. When considering angular motion, a torque will cause an ___________________ ____________________ (consider both torque equations)
8. What must be the centripetal force that keeps the lady bug moving in a circle? __________________________________________________________________
9. Why does this force eventually fail? ____________________________________ __________________________________________________________________
10. Reset all, and set the force back to 1 N.
11. Observe the acceleration vector as you start. Describe how it changes. _________ __________________________________________________________________
12. Will the acceleration vector ever point directly to the center? ________ Why / Why not? (the next steps might help you answer this question) _______________ __________________________________________________________________
13. Reset all. Set the force back to 1 N.
14. Hit start, wait about 2 seconds, and set the brake force to 1 N. Hit enter and observe.
15. Describe the motion of the wheel: ______________________________________
16. What happened to the acceleration vector? __________________________ Why? __________________________________________________________________ __________________________________________________________________
17. What is the net torque? _________
18. Reset all. Set the Force back to 1 N. Hit Start.
19. After a few seconds, set the brake force equal to 3N and hit enter.
20. Right after you set the break force, calculate the net torque (check with the graph):
21. Eventually the disc stops and the net torque is zero. This is because the breaking torque changed as you can see in the graph. Why did it change?
Part II: Moment of Inertia
1. Click the Moment of Inertia Tab at the top.
2. Disregard any millimeter units. They should all be meters.
3. To best see the graphs, set the scale of the torque graph to show a range of 20 to -20.
4. Set the Moment of Inertia Graph to show a range of 2 kg m2 to 2 kg m2
5. Set the angular acceleration graph to show 1,000 degrees / s2 to 1000 degrees / s2
6. Calculate the moment of Inertia for the disk with the given information.
7. Hold the mouse over the disk so the mouse finger is pointing anywhere between the green and pink circles.
8. Hold down the left mouse button. Move your mouse to apply a force.
9. Look at the graph and try to apply a force that creates a torque of 10.
10. Use the ruler to determine the radius at any point between the green and pink circles. r = ___________m
11. Calculate what the applied force must have been.
12. Calculate the angular acceleration of the disk. Work in SI units, and then convert to degrees / s2. Compare to the graph to check your answer.
13. Predict what will happen to the moment of inertia if you keep the mass of the platform the same, but you create a hole in the middle (increase inner radius). __________________________________________________________________
14. Set the inner radius equal to 2. Calculate the moment of inertia for this shape. Set the disk in motion and check your answer by looking at the moment of inertia graph.
15. Even when the force on the platform changes, the moment of inertia graph remains constant. Why? _____________________________________________ __________________________________________________________________
16. Fill in the blanks: When the mass of an object increases, the moment of inertia ________________. When the distance of the mass from the axis of rotation increases, the moment of inertia ___________________.
Part III
1. Click the Angular Momentum tab at the top.
2. Set the scale of the moment of inertia and angular momentum graphs to show a range of 2 to -2.
3. Set the angular speed to be 45 degrees / s.
4. What is the SI unit for angular momentum? ______________________________
5. Calculate the angular momentum in SI units (you should have already calculated the moment of inertia in part II).
6. While the disk is moving, change the inner radius to 2.
7. Observe the graphs.
8. Changing the inner radius automatically changes the angular velocity to 36 degrees / s. Why? (mention moment of inertia and angular momentum in your answer).
IV. Definition of Center of Gravity (9.3)
(Recall center of mass stuff from last unit? Similar concepts)
The center of gravity of a rigid body is the point at which its weight can be considered to act when the torque due to the weight is being calculated.
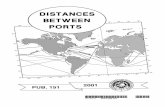
When an object has a symmetrical shape and its weight is distributed uniformly, the center of gravity lies at its geometrical center. For instance, Figure 9.9 shows a thin, uniform, horizontal rod of lengthLattached to a vertical wall by a hinge. The center of gravity of the rod is located at the geometrical center. The lever arm for the weightis, and the magnitude of the torque is. In a similar fashion, the center of gravity of any symmetrically shaped and uniform object, such as a sphere, disk, cube, or cylinder, is located at its geometrical center. However, this does not mean that the center of gravity must lie within the object itself. The center of gravity of a compact disc recording, for instance, lies at the center of the hole in the disc and is, therefore, outside the object.
Figure9.9
A thin, uniform, horizontal rod of lengthLis attached to a vertical wall by a hinge. The center of gravity of the rod is at its geometrical center.
V. Center of Gravity for a Group of Objects (9.3)
Suppose we have a group of objects, with known weights and centers of gravity, and it is necessary to know the center of gravity for the group as a whole. As an example, Figure 9.10ashows a group composed of two parts: a horizontal uniform boardand a uniform boxnear the left end of the board. The center of gravity can be determined by calculating the net torque created by the board and box about an axis that is picked arbitrarily to be at the right end of the board. Partaof the figure shows the weightsandand their corresponding lever armsand. The net torque is. It is also possible to calculate the net to