
Weak-values Technique for Velocity Measurements
17
Weak-values Technique for Velocity Measurements Weak-values Technique for Velocity Measurements Gerardo Viza, Julian Martinez-Rincon, Gregory A. Howland, Hadas Frostig, Itay Shomroni, Barak Dayan and John Howell Gerardo Viza, Julian Martinez-Rincon, Gregory A. Howland, Hadas Frostig, Itay Shomroni, Barak Dayan and John Howell G. I. Viza et al. Opt Let 38 16 2949 (2013) Generated by Foxit PDF Creator © Foxit Software http://www.foxitsoftware.com For evaluation only.
Transcript of Weak-values Technique for Velocity Measurements

Weak-values Technique for Velocity Measurements
Weak-values Technique for Velocity Measurements
Gerardo Viza, Julian Martinez-Rincon,
Gregory A. Howland, Hadas Frostig, Itay Shomroni,
Barak Dayan and John Howell
Gerardo Viza, Julian Martinez-Rincon,
Gregory A. Howland, Hadas Frostig, Itay Shomroni,
Barak Dayan and John Howell
G. I. Viza et al. Opt Let 38 16 2949 (2013)
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Why are velocity measurements important?
Why are velocity measurements important?
Y. Yeh and H. Z. Cummins (1964)
40 um/s
Laser Doppler Anemometry
In-vivo medical imaging
Quality control vibrometry
N. Brunner and C. Simmon PRL 105, 010405 (2010)
Measuring longitudinal phase with frequency-domain analysis
Y. Yeh and H. Z. Cummins (1964)
40 um/s
Laser Doppler Anemometry
In-vivo medical imaging
Quality control vibrometry
N. Brunner and C. Simmon PRL 105, 010405 (2010)
Measuring longitudinal phase with frequency-domain analysis
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Preparation of StatePreparation of State
Use long temporal Gaussian pulses
Michelson Interferometer
Use long temporal Gaussian pulses
Michelson Interferometer
2
2
20 exp
ttItI
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.
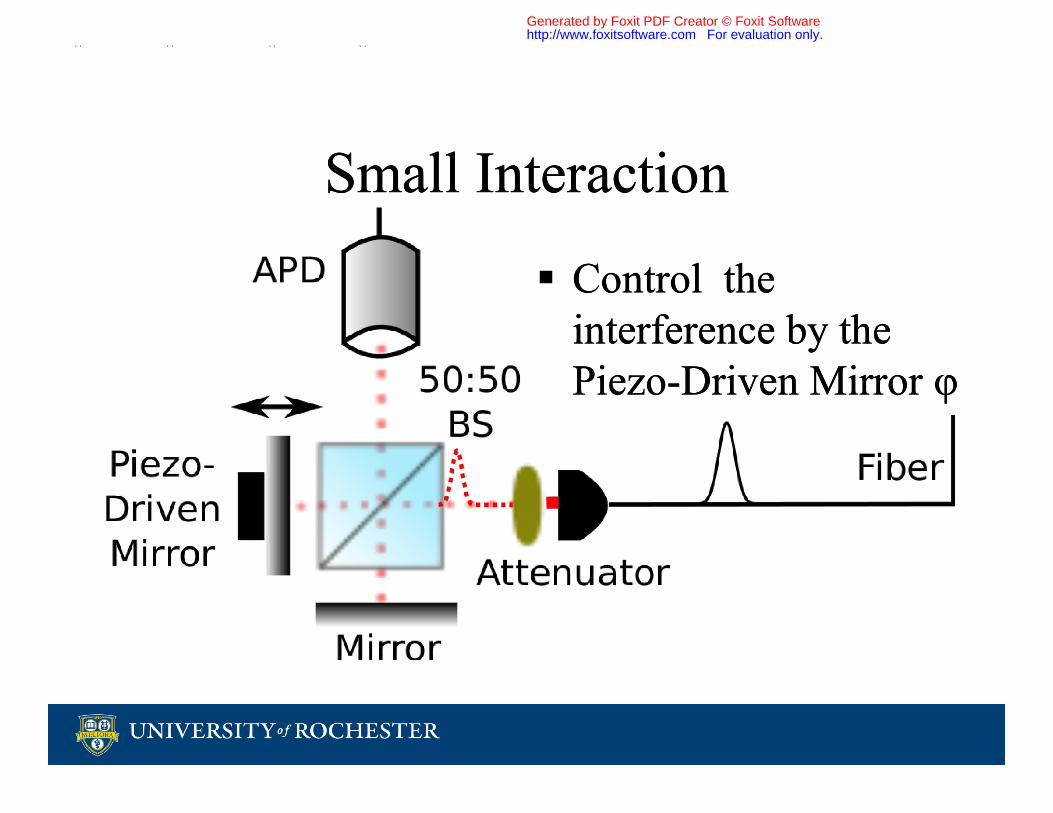
Control the interference by the Piezo-Driven Mirror φ
Control the interference by the Piezo-Driven Mirror φ
Small InteractionSmall Interaction
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

ObservationsObservations
Time Domain: no change
Frequency Domain: One pulse is red or blue detuned
Technologically difficult to measure frequency and much easier to measure arrival time.
Time Domain: no change
Frequency Domain: One pulse is red or blue detuned
Technologically difficult to measure frequency and much easier to measure arrival time.
02 ff cv
d
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.
Observations 2Observations 2
Phase:
Point by point interference
Mirror is imparting a phase within the coherence length of the laser
Pulse:
Pulse length >> Coherence length of the laser >> φ
Phase:
Point by point interference
Mirror is imparting a phase within the coherence length of the laser
Pulse:
Pulse length >> Coherence length of the laser >> φ
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

TheoryTheory
22
2
120
2
sin
sin
2
20
2
0
2
2
2
2
expsin
expsin
22exp1
kv
kvtt
tI
I
tkxiitItI
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Weak-valuesWeak-values
Coupled velocity/frequency to time
Pre-selection: temporal Gaussian pulse
Small interaction:
Tiny velocity disturbing the frequency domain
Post-selection: angle close to destructive interference
Result: A shift in arrival time
Coupled velocity/frequency to time
Pre-selection: temporal Gaussian pulse
Small interaction:
Tiny velocity disturbing the frequency domain
Post-selection: angle close to destructive interference
Result: A shift in arrival time
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

LimitationsLimitations
Cramer-Rao Bound; the lowest bound of the variance over an unbiased estimator. When achieved, the estimator is efficient. = 1/F
Fisher Information
Cramer-Rao Bound; the lowest bound of the variance over an unbiased estimator. When achieved, the estimator is efficient. = 1/F
Fisher Information
2
2
2 22
1 exp;
ttttP
2;ln; ttPttPdtF tdd
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Fisher Information:
Uncertainty of is bounded by:
Error in estimating velocity is bounded by:
Fisher Information:
Uncertainty of is bounded by:
Error in estimating velocity is bounded by:
2
2
22 ;ln;sin
N
dtd ttPttdtPN
t
Nkk
tCRBv
2
1
2 2
N
t
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Smallest resolvable velocitySmallest resolvable velocity
Our Signal-to-Noise ratio is straight forward for a Gaussian: time shift divided by the uncertainty of the time shift
SNR =
Our Signal-to-Noise ratio is straight forward for a Gaussian: time shift divided by the uncertainty of the time shift
SNR = vvt N
2
2
2 22
1 exp;
ttttP
Starling, et al. PRA 82, 063822 (2010)
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

ResultsResults
22kvt
rad
ms
3.0
8337.1
spmv 1160
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Uncertainty ResultsUncertainty Results
Estimator is efficient
There is not better estimator to produce smaller uncertainties.
Estimator is efficient
There is not better estimator to produce smaller uncertainties.
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Sub picometer/secondSub picometer/second
What tricks can we do to achieve sub picometer/second? post-selecting angel smaller
pulses longer
What tricks can we do to achieve sub picometer/second? post-selecting angel smaller
pulses longer
22kvt
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Results 2Results 2
Our estimator changed from Gaussian to only the tip. Only the top 12% peak to peak intensity variation.
Our estimator changed from Gaussian to only the tip. Only the top 12% peak to peak intensity variation.
V_pp [mV] Φ [ rad] v [pm/s]
2.0 0.275 1.4±0.5
1.0 0.276 0.6±0.4
0.5 0.279 0.4±0.4
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Conclusion and RemarksConclusion and Remarks
The new estimator is not efficient but it helped us resolve slower velocities.
Instability of the interferometer limited our integration time. The path length was constant for less than 15mins at a time.
A weak-values technique allowed us to reach a CRB for velocity measurements.
Achieved 400fm/s with a .
In each run we took (10min) the mirror moved the distance of about 2 hydrogen atoms!
The new estimator is not efficient but it helped us resolve slower velocities.
Instability of the interferometer limited our integration time. The path length was constant for less than 15mins at a time.
A weak-values technique allowed us to reach a CRB for velocity measurements.
Achieved 400fm/s with a .
In each run we took (10min) the mirror moved the distance of about 2 hydrogen atoms!
s50
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.

Thank youThank you
John Howell
Julian Martinez-Rincon
Gregory A. Howland
And contributions from Israel
Hadas Frostig
Itay Shomroni
Barak Dayan
Army Research Office
John Howell
Julian Martinez-Rincon
Gregory A. Howland
And contributions from Israel
Hadas Frostig
Itay Shomroni
Barak Dayan
Army Research Office
Generated by Foxit PDF Creator © Foxit Softwarehttp://www.foxitsoftware.com For evaluation only.


















