
WASHINGTON UNIVERSITY - NISTrpr2 iprs lash print solv stot stress zeros cplrrij.t* date" i i i l...
126
PB 82.... ; 14 7q?7 WASHINGTON UNIVERSITY SCHOOL OF ENGINEERING AN C APPLIED SCIENCE DEPARTMENT OF CIVIL ENGINEER1NG SHORE - IV. Finite Element Program for Dynamic and Static Analysis of Shells of Revolution USERS' MANUAL by O. M. El-Shafee, P. K. Basu, B. J. Lee and Research Report No. 56 P. L. Gould Structural Division October 1981 This report is part of final report for National Science Foundation Grant PRF7900012 R'tPRODUC'tD NATIONAL TECHNICAL SERVICE us DfPAR1MENf Of COMMERCE StRINGfiElD VA 1216:
Transcript of WASHINGTON UNIVERSITY - NISTrpr2 iprs lash print solv stot stress zeros cplrrij.t* date" i i i l...

PB 82....; 147q?7
WASHINGTON UNIVERSITY
SCHOOL OF ENGINEERING AN C APPLIED SCIENCE
DEPARTMENT OF CIVIL ENGINEER1NG
SHORE - IV.
Finite Element Program for Dynamic and Static Analysis
of Shells of Revolution
USERS' MANUALby
O. M. El-Shafee, P. K. Basu, B. J. Lee
and
Research Report No. 56
P. L. Gould
Structural Division October 1981
This report is part of final report forNational Science Foundation Grant
PRF7900012
R'tPRODUC'tD B~
NATIONAL TECHNICALINfO~MATION SERVICE
us DfPAR1MENf Of COMMERCEStRINGfiElD VA 1216:


SHORE-IV
Finite Element Program For Dynamic&
Static Analysis of Shells of Revolution
USERS' HANUAL
by
O. M. El-Shafee, P. K. Basu, B. J. Lee
and
P. L. Gould
Research Report No. 56, Structural Division
Department of Civil Engineering
School of Engineering and Applied Science
Washington University
October 1981
Any opinions, findings, conclusionsor recommendations expressed in thispublication are those of the author(s)and do not necessarily reflect the viewsof the National Science Foundation.


PMF~E
The SHORE-IV program can be used for the static and dynamic analysis
of arbitrarily loaded thin elastic shells of revolution with or without
column supports, in the elastic regime. The soil effect on the dynamic
behaviour can be considered. This manual describes the procedure to be
followed in preparing the input data for this program and also assists
in the interpretation of the output. A number of sample inputs and
outputs utilizing the various options of the program are included. This
and the accompanying Theoretical Manual comprise the documentation of
SHORE-IV program.
, ,
1;'


TABLE OF CONTENTS
Section
Introduction " __ . til • 1
Input for SHORE-IV Program ••••••••••••••••••••••••••••••• 10
Card Formats
Data Cards for
............................. ................. ,. e- .
Each Problem ill •••••••••••••••••••
16
17
A.
B.
Problem Identification Card ••••••••••••••••••••••••
Problem Control Card ..••..••...•.•....•....•.•...•.
17
18
C. Element Cards . . 22
D. Nodal Point Cards . . 29
E. -
F.
Material Information Cards
Displacement Function Card . ..32
38
G.
H.
1.
Output Requirement Cards •••••••••••••••••••••••••••
Control Data Cards for Dynamic Analysis ••••••••••••
501.1 Cards .
39
45
48
J. Loading Information Cards • e- . 53
K. Data Cards for Dynamic Analysis by DirectIntegration " " _-# __ II .. .. • .. • .. .. .. .. .. .. .. .. .. .. .. • .. .. 58
L. Data Cards for Dynamic Analysis by ResponseSpec t r'lJJIl _ # .. .. .. .. • .. • .. .. .. .. .. .. • .. .. .. .. .. 63
M. Last Control Card .. " .. 66
SHORE-IV Program Output - '................ 67
Acknowledgements
Appendices
......................................... 0 .. 71
Appendix A
Appendix B
Appendix C
System Control Cards ••••••••••••••••••••••
Elements of Constitutive Matrix •••••••••••
Intermediate Printout Option Codes ••••••••
72
73
75
Appendix D - Direct Integration Scnemes
! f !
77

Table of Contents (cont.)
Section
Appendix E - Listing of 'FOHARM' ••••••••••••••••••••••• 83
AppendixF - List of 'THPLOT' •••••••••••••••••••••••••• 90
Appendix G - Demonstration Problems •••••••••••••••••••• 92
Example No. 1 - Free Vibration Analysis of aCylindrical Shell.................. 93
Example No. 2 - Free Vibration Analysis of aHemispherical Shell................ 95
Example No. 3 - Free Vibration Analysis of EmptyWater Tank with Soil InteractionEffect III • • • • • •• • • • • • • 97
Example No. 4 - Static Analysis of Column SupportedHyperboloidal Tower Under WindLoad ••....•.................•..•... 100
Example No. 5 - Dynamic Analysis of a Free-FixedCylindrical Shell Under BlastLoad .•..••••.••.•••. III ••••• III • • • • • • • • 103
Example No. 6 - Hyperboloidal Shell Under DynamicWind Load .........................• 106
Example No. 7 - Response Spectrum Analysis ofHyperboloidal Shell With SoilInteraction ~_~_.._~oo: -=-=-109 _
Example No. 8 - Time History Analysis of Hyper-boloidal Shell •.••••••••••••••••••• 113a. With Soil Effectb. Without Soil Effect
References •••••••••••••••••••••••••••••••••••••••••• fl· ••••
.IV
117

INTRODUCTION
The SHORE-IV program is designed for the linear static and dynamic
analysis of arbitrarily loaded thin to moderately thick elastic shells
of revolution. The meridional curve of the shell may have any quadratic
shape including the closed end case. The shell may be isotropic, or
single or multi-layer orthotropic, with the two principal material
directions at any point coinciding with the two principal directions of
the middle surface. The shell may have discrete supports in the form of
a framework of linear members with various end conditions and arrange-
ments. Such a framework may also be located at any other level except
at the top. Also, complete framed structures having the form of a
surface of revolution with the linear members running along the principal
directions of the middle surface can be analyzed. As a special case,
flat axisymmetric plates may also be considered.
Axisymmetric shells founded on footing foundations may be analyzed
dynamically including the soil-structure interaction effect. The soil
model consists of isoparametric quadratic solid axisymmetric elements
with transmitting_boundaries to account for the far-field effect. The
soil may be an elastic half-space or horizontally layered strata underlied
by bedrock at an actual or assumed depth. Cross-anisotropy for the soil
material is assumed. Element to element variation of material properties
is admissible. The user may supply detailed information for the soil
data or may supply only as few as three cards for the soil data, with
automatic data generation by the program. In the case of deep foundations--
the soil effect can not be considered.
The shell is discretized by a series of curved rotational elements
and, -if necessary, cap elements. Discontinuous meridian curves are
permissible, provided a nodal point is located at such discontinuity.
The thickness of an element may vary linearly along the meridian. Element
to element variation of material properties is admissible. Figure (1)
shows the system model.
In the case of static analysis the following_loading conditions can
be considered:
1. Distributed pressure loading acting in the u, v, and w
directions (for sign convention see Figures 2, 3, and 4)
2. Concentrated line loads applied at designated nodal points
in the u, v, w, S~, and ~e directions.
3. Gravity loads due to self-weight (or a fraction thereof)
acting in the Z, or R directions.
4. Thermal loads.
In addition, non-zero nodal displacements in the u, v, w, S~, and
Sa directions can be prescribed. If desired, the base constraints may
be prescribed with reference to the global Cartesian coordinate system
(R,Z).
In the case of dynamic analysis, apart from the above loading
cases, the effect of base accelerations due to earthquake can be considered.
It is possible to use either a consistent or a lumped mass matrix; but,
for better results, it is preferable to use the former. The program is
capable of carrying out time-history analysis by direct integration.
For this purpose, the user has the option of choosing any single step
higher derivative scheme (e.g., Newmark's, Wilson's, etc.) or any multi
step scheme (e.g. Houbolt's method). Otherwise, Wilson's a-method (with

-3-
AXIS OF SYM.
r---------
r------Ir------
REGION MOOEL
A HPRS" ELEMeNTS
HPRS ELEMENTS
APPROACH
CONTINUOUS BOUNDARY
SUPCRPOSlTlON
,-------c OPEN ELEMENT SUPERPOSITION
1-------SUPERPOSITIONBOUNDARY ELE
MENT
E EQUIVALENT aOUN- CONTINUOUS BOUNDARYDARY SYSTEM
o
" HPRS ::. High- Precision Relational Shell
RING FOOTING
SOIL MEDIUM
COLUMNS
Q
u
t
L~-------I
T- ~ ------ ----c:Q I- _LQ.W!B ....!:J.N.lEL _ --
+
Tw
--L
Figure 1. Proposed Model for _aCooling Tower Shell

Ne
-4-
a~
Stress Resultants
Stress-Couple Resultants
Figure 2. ,Sign Conventions

Qt1l
hn ~ THICKNESS
hk - THICKNESSho - THICKNESS
MIDDLe· SURFACE
OF OUTER LAYER
OF INTERMEDIATE LAYER
OF MlOOl£ LAYER
Figure 3. Multilayer Shell Element

-6-
\~
\
END DISPLACEMENTS
END FORCES
Figure 4. Sign Convention for Members in Open Type Elements

e = 1.4) can be used as the default option. If desired, it is possible
to specify more than one time step. This may sometimes be helpful in
saving computer time. Earthquake analysis can also be carried out by
the response spectrum method. The free vibration analysis is carried
out by the combined Sturm sequence and inverse iteration technique [1].
All loads~hich are not axisymmetric are required to be expanded
in Fourier harmonics; for this purpose, a separate program package
(FOHARM) may be used. The loading need not be symmetric about the
e = 0° line, i.e. both sine and cosine harmonics can be considered
simultaneously. The number of harmonics to be considered will depend
upon the nature of the loading and the accuracy desired. The distributed
loadings and the temperature distribution may vary linearly along the
meridian of each element.
The input data format is such that repetitive data is reduced to
minimum. Moreover, in the event of some specific errors in input data,
the run is terminated before the problem is executed and the corresponding
error code, or message is printed out.
Various printout options for displacements, stress-resultants and
stresses are available. The time history plot for displacements and
stress resultants can be obtained on the printer. Alternatively, for
offline plotting on a 760/563 Calcomp plotter system, a plot tape can
be created. Also, the time history results can be obtained on punched
cards for further uses.
This program is an extension of the Shell of Revolution Finite
Element Program SHORE-III [2,3]. It is written in FORTRAN IV language
and has been developed on an IBM 360/65 computer.

-0-
SHORE-IV is an in-core solver requiring less than 500 K in high
speed storage. For running the program it is necessary to use the
overlay structure shown in Figure 5.
The input data and intermediate results are required to be stored
on seventeen scratch disk files and three tapes. For Calcomp plotting a
800 bpi, 9-track tape is also required.

-Ij-
ROOT SEGMENT (300 K)
MAIIlCAPTOESUGoGl-lPROOGN'I'RA
OMINVrPR2IPRSLASHPRINTSOLV
STOTSTRESSZEROSCPlrrIJ.t*DATE"
I I I lOVERLAY a
l OVERLAY as OVERLAY as OVERLAY a, OVERLAYag
OYR2
DATAl EASt
LISTED CARS SSGPR EIGSNS
SETFC OISM INVtT
SETPC SNCO OYR; ISOLAT
ZERO1 GUIX NtlMBURZER04
OVERLAYa2
OVERLAYa4 OVERLAYa6 OVERLAY as
alOE STATICSSS CALQFEIG/II oATA2 ZER03 asGPEIG/ST SMATS oATA3EL.\tiT IPRS OYRIFACT RFt'N MSTFAR S'lORS PLHtSFeT 7ER02 SST!iN1CL i'IIIISlNVLYRSSSTSUBASE
I IOVERLAY 8
1OVERLAY 8
2OVERLAY Y
lOVERLAY Y2
PRPLOT
ARC eLSl LOAD BLOT CCl'torCALC CLB2 !'MROo AXIS'CALGS CLOI PROD ear LIN!!"CALH eLD2 TASL NUMBER"CALlIC CLAM TABLe SSOT PLOT*CALP CLBf~ TABLFP PLOTS'eAPl CLoM TEMP SCALS"eLAI FINA ZER02 SYMBOL"
CLA2 !'MINA
IIOTE: Subt'Outines Marke<l with an Asterisk C'J areInstallation Dependent.
Figure 5" Overlay Structure of SHORE-IV

-.lU-
INPUT FOR SHORE-IV PROGRAM
The input data for the SHORE-IV program consists of complete data
sets for each problem to be run, placed sequentially. The data for each
problem is organized into a number of groups associated with card types
A through L. Some of these groups, namely those corresponding to card
types E, G, H, etc., are subdivided into various optional blocks of
input data. There is no limit to the number of problems that can be
executed per run. The schematics of input data decks for various types
of problems are shown in Figures 6 to 10.
The program uses seventeen temporary disk files, namely 9, 10, 11,
25, and three temporary tapes, namely 26, 27 and 28. In the case of
dynamic analysis when Calcomp plotting of time history response is
desired, a permanent tape, the PLOTTAPE, (9 track, 800 bpi), is required.
Therefore, the above mentioned deck should be preceded by suitable
system control cards allocating the above mentioned spaces. For example,
on an IBM 360/65 computing system, the JCL statements shown in Appendix A
may be used.

-11:-
(~JOBEND
/® PROBLEM IDENTIFICATION CARD:I . PRCB. 3
PROBLEM IDENTlACATlON CARD:PROB. 2
( ® PROBLEM IDENTIFICATION .CARD:PROB. I .
(JCL CARDS ASSIGNING SCRATCH
DISK AND TAPE SPACE
(' EXEe CARD
SYSTEMS JOB CARD
-
.,1
-
Figure 6·. Input Data Stream for So Job

(CD
~DJNG
INFO
RM
.trrK
»JC
ARD
S(n
eede
dfo
rea
chha
rmoo
/cl
.
('®
OU
TPU
TR
EQU
IREM
ENT
CARD
S
,/®
DIS
PLAC
EMEN
TFU
NC
TnJ
CARD
(CP
T)
('<6)
MA
TER
IAL
INFO
RM
ATIO
NC
ARD
S
~~
,/@N
OD
ALPO
INT
CAR
DS
E:RM
(©E
LEM
EN
TC
ARD
S~'CIRCUIrlFEJ
OU
TPU
TC
(@PR
OBL
EMCO
NTR
OL
CARD
-®
PR
OB
LEM
ICE
-lTIF
ICA
TIO
NC
ARD
f--
.....-
--
ISPl
.AC
EMEN
TC
ARD
S(O
p'/OI
I1'11
JTH
ER
MA
l.I.O
ADIN
OC
ARD
(opt
lono
l)EN
TRAT
EOtJ
OO
ALC
IRC
LEG
CA
RD
S(o
ptiO
llO/}
·RJB
IJTED
LOAD
ING
CARD
S(o
pt/(,
Jlol
)'N
TRO
LCA
RDCA
RD INTE
:DO
UT
CA
RD
S{O
flIio
tId'
OC
AT
'ON
CARC
IS(o
plio
lao/
JAR
O.
I I-'
N I
Fig
ure
7.
Inp
ut
Dat
aD
eck
for
Sta
tic
An
aly
sis

I l v I
ftO
Alm
GCX
WTR
OI.
CARD
~TI
TLE
CARD
'AA'
TOUT
CA.
qo(o
p/Q
nQ/'·
CAR
D
ItW
EA
NA
U'S
ISCA
RD1T
Rf)(
CARD
(0I...
OADN
GIN
FORM
ATIC
1'JCA
RDS
(nee
ded
for
each
horm
oolc
J
(CD
$O
U...
'.iC
ARD
S
(<8>
CO
NTR
OL
DATA
CAR
DS
FOR
DYN
AMIC
ANAL
YSIS
('®
OU
TPU
TR
EQU
IREM
ENT
CAR
DS
r--
('®
DISP
LACE
~IEN
TFU
NC
TIO
NC
NID
(CP
r)
,/®
MAT
ERIA
LIN
FORM
ATIC
NC
ARD
S-
~-AG
(@N
OD
ALPO
INT
CAR
DS
-A"E
RMt!l
/Al
(©E
LEM
EN
TC
ARD
S_
PUT
CON'
(®PR
OBL
EMC
ON
TRO
L·CA
RDr-
-
,@
PRO
BLEM
IDEN
TIFI
CAT
ION
CAR
Dr--
----
r--
Fig
ure
8.
Inp
ut
Dat
aD
eck
for
Fre
eV
ibra
tio
nA
nal
ysi
s

CAllO
S(o
pIfa
tal)
l'"r'f
£C
ARD
lYSI
SCA
RDo
.AiiA
aNG
CONT
ROl.
CARD
AciA
DTI
TLE
CARD
:l.P
J::C
;{K
Al"
VA
LlI
&:
....
."..
...'~
.S
Pf,"
Clli
AL
OAM
PIN
O-R
-C.T
10C
ARO
SC
ON
TRa.
.C
ARD
FOR
RE
SF(
WS
ESP
ECTR
UM
..:J:.PONS~i~CR~~'
~~
TITL
EC
ARD
(©DA
TAC
ARD
Sro
om
'NA
MIC
ANAL
YSIS
BYR
ESPO
NSE
SPEC
TRU
M
(Q)
LOAD
ING
INFO
RM
ATIO
NC
ARD
S
('ID
SO
ILC
ARD
S
(®C
ON
TRO
LDA
TAC
ARD
SFO
RD
YN
AM
ICA
NA
LYS
ISr--
(@O
UTP
UT
RE
QJI
RE
ME
NT
CAR
DS
A:(®
CYS
PLAC
EMEN
TAJ
NC
TIO
NCA
RDIO
Pr)
-('
®M
ATE
RIA
LIN
FOR
MAT
ION
CAR
DS
= ~YNAMIC
LOA
!
(@N
OD
ALP
OIN
TC
ARD
SI--
lGEN
VAl.U
£A
Joj
ASS
MA
mlX
CI
(©E
LEM
EN
TC
AR
DS
~MEOIATE
PRW
TOlJT
r--
TPU
TC
CN
TRO
LC
ARD
("@
PRO
BLEM
CC
WTR
OL
CAR
DI-
®P
RO
BLE
MID
EN
TIFI
CA
TIO
NCA
RD---
f-
-I--
Fig
ure
9.
Inp
ut
Dat
aD
eck
:fo
rR
esp
on
seS
pec
tru
mA
nal
ysi
s

.RE
CO
RD
PO
INT
CA
RD
S~
-TIn
.1!
CARD
FOR
INPU
TTI
ME
fUN
CTI
ON
IHTT
W.
COND
lTIC
WC
ON
lnO
LCA
RD.
_£lA
TACC
WTR
OL
CARD
FOR
DYN
AMiC
ANAI
YSJS
.®
DATA
.CAR
DSFO
RfJ
r'NAM
ICD
IRE
CT
INTE
GR
ATED
SCH
EME
CAR
D,A
NA
LY
SIS
BYDI
RECT
INTE
GRA
TIO
N
tDW
ADIN
GIN
FOR
MAT
ION
CAR
DS
I
(nee
ded
for
each
harm
onic
)
('CD
.SO
ILC
ARD
S
/(fp
CO
NT
RO
L-U
4TA
CARD
SFO
Rr
-D
YNAM
ICAN
ALYS
IS
®CX
JTFU
TR
EQU
IREM
ENT
CARD
S
®aS
PLA
CE
ME
NT
FUN
CTI
ON
CARD
((F
'f)
(®M
ATER
IAL
INFO
RM
ATIO
NCA
RDS
(@N
OD
ALPO
If-v'T
CAR
DS
('©
ELEM
ENT
CAR
DS
(®PR
OBL
EMCO
NTRO
LC
ARD
®P
RO
BLE
MID
ENTI
FIC
ATIO
NC
ARD
I--
I--
I--
I--
I--
ISPl
..AC
EMEN
TC
ARD
S(o
ptlo
ndl
rHE
RM
.U.
LOA
DIN
GCA
RPS
(opt
IOllQ
I)Iml--.<~~ENTRATED
NO
DAl
.C
lRC
I.EIN
GCA
ROO
(opl
iallJ
l1•
ISTR
IBU
TIO
NLO
ADIN
GC
ARD
S(q
tlon
all
OAD
lNG
CO
Nnl
OL
CARD
ADrrn
.£C~D
~.N4MJC
LOA
DTY
PEC
ARD
..~E:
::::EE::
~D/'r
iME"
'HlS
TOR
fW
TPU
TC
ON
TRC
1,C
ARD
'CIRNJu~~~1.
~<XffcwCAROcJo~o1~~J.ct,
t--'
"---
A2l
.!T
PlJ
TC
ON
TRO
LC
ARD
I t l.. I
Not
e:C
ards
mar
ked
wit
han
ast
eri
sk(*
)m
ayb
ere
pea
ted
for
each
harm
onic
depe
ndin
gup
onth
eo
pti
on
CO
desp
ecif
ied
inpr
oble
mco
ntr
olcard~
Fig
ure
10
.In
pu
tD
ata
Dec
kfo
rT
ime
His
tory
An
aly
sis
by
Dir
ect
Inte
gra
tio
n
-.16-
Card Formats
'The integer field is expressed as I2, I3, IS, etc., meaning thereby
. integer fields of 2, 3, 5, etc. characters. The floating point numbers
are indicated mostly by F8, F9, FlO, etc., meaning floating point num-
bers with fields of 8, 9, 10, etc. characters. In a few cases the
floating point numbers are expressed as E9, ElO, meaning floating
point numbers with exponents consisting of 9, 10 characters • Floating~.-. . . -
point ..number~...shal1..be entered with a decimal po.int, and those in E- .
format..and the.inte.gersmust be right justified. For each record (or
card) of 80 columns, the formats shall be as stated in subsequent sections.
Units
Any consistent units may be used. Of course, the force and distance
units for all input quantities should be the same. For convenience the
units used may be stated on any of the title cards.

-17-
i)A1'A CARDS FOR EACH PROBLEM
A. - Problem Identification Card:
The information contained on this card is the first_ print out for
each problem and is usually the title assigned to the problem. In- the
last eight columns of this card the code words for input data echo op-
tions are stated.
Columns
2 - 72
73 -79
Format
A
A
Entry
Problem Title to be output withresults
NO' ECHO - if the problem is to berun without printing the echo ofinput data
If the columns 73 - 80 are left blank the input data echo is printed
and also the problem is run.

-llS-
B. Problem Control Card:
The information contained on this card is as follows:
1. The number of rotational finite elements used for discretizing
the structure. The maximum number of elements allow~d·i~ 48.
2. The number of harmonic loading cases to be considered.
3. the type of structuralcro~s-sectionwith the following
code numbers:
isotropic
single layer orthotropic
framed
multilayer(Each layer may beorthotropic orisotropic. )
o (at' blank)
1
2
number of layers {must beodd} • The minimum is 3 andmaximum 7.
In the case of multilayer shells,. even if the number of layers is
not odd and!or the layeTs are unsymmetrical, the problem can be
solved to a point by specifying 2 as the code ulJmber; the output
results will be stress resultants and displacements only.
4. The code number for the type of analysis:
static analysis 0
free vibration analysis 1
time history analysis
mode superposition
response spectrum
direct integration
2
3
4

5. The maximum degree of polynomial approximation to be used in
the stiffness and mass matrices. The maximum is 6, and the
default value is 3. It is recommended that 6 be used for
static analysis and 3 for dynamic analysis [3].
6. The code number to avoid inputing of repetitive data required
for the time history analysis by direct integration:
Control data for dynamic analysis,or time history data to be suppliedfor each harmonic
The above data to be supplied forthe first harmonic only
The format of Problem Control Card will be as follows:
1
°Columns
1 - 5
6 - 10
11 - 15
16 - 20
21 - 25
30 - 35
36 - 40
41 - 45
Format
15
IS
15
IS
15
15
15
15
Number of finite elements to be used
Number of harmonic loading cases
Relevant code number for shell material
Code number for type of analysis
Maximum degree of polynomial approximation
1 or 0, refers to control data fordynamic analysis by direct integration
I or 0, refers to time history data
1 or 0, refers to soil-structure interaction effect
The flag 1 in the sixth field signifies that the control data card
for dynamic analysis, J(b), is input separately for each harmonic. If
left blank, it signifies that this card is input for the first harmonic
only. Similarly, the flag 1 in the seventh field signifies that the
input time function cards, J(e) and J(f), are input separately for each
harmonic. Otherwise, the same are input for the first harmonic only.

-20-
If the columns 41 to 45 are left blank the soil-structure interaction
is not considered.
If the flag 1 appears in the column 45 the interaction effect is
considered and the soil data of section "I" must be supplied.
For static analysis columns 41 to 45 must always be left blank.
C. Element. Cards
One card is required for each element, with the cards placed in
numerical sequence of element numbers. The elements are, required
t.o be numbered consecutively from the top to the bottom of the shell
beginning with element number- 1. Flat plates should be numbered
consecutively from inside to outside. Only one cap element may be
used for the analysis of a closed shell of revolution and this must
be numbered element 1. (See Figures 11 and 12 ) •
If some cards are: omitted~ the element information for the omitted
elements is set equal to the element information on the preceding ele
ment card. However, element cards for the first and~ elements must
always be supplied.
Each element card should state the element number, the element type,
the meridian definition cnde and certain constants defining the meridian.
For element types, refer to the library of elements' in P,ij;U:t"O 13. In the
case of open type elements, the element type field also states the num
ber and end conditions of the members comprising the open type element.
For end conditions of open type elements, refer to ,Figure 14. The
meridian definition code defines how the. meridian curve. of the. element
is specified. Far a- global coordinate system the code number is zero (or
blank) and for c,.local coordinate systelll it is the nodal point number where
Z • o. For 'a. type. 2 cap element, the Z-coordinateof the pole must be
zero. The meridian definition code is not appll.cabla in the case of. . .. ",.,
type 4 and type 5 elements.

'aEMENT- NUM.BER. •
TOP
.-- AXIS OF. REVOLUTION
OPEN
W - Ncrmal dis.pla.c~~
.84> - Rotoikif in 4> - direction
138 - Rofation in 8 - direction
U - Displacement in eII- direction
V - Displacement in e- qirectfon
CLO$ED TOP
P t---- -,~
, InJ);)}IIIIIIIIIIIlI
R•
Figure 11. Finite Element Discretization of Shell of Revolution

E~MENT 1YPE 4
£LEMENT " TYPE. P
//
//
/
-"", ......"- .......
""'\. .\\
\\\\
6 .NODAL .PO,~rNUMBER
----Ri{=R3
RFtf(=R4} ., .'
.....,;'
.//
//
//
I
\\\\
\
·ELEMENt!"NUMBER'
Figure 12. Finite Element Discretization of an Axisymmetric Plate

-:L4-
CODE TYPE· SHAPE
"GENERAL,/
I-- fI (CURVED)
II
\,
CAP ~Z ( lNF1NlTE ,/
SLOPE) /I
CAp: /3 ( FINITE ,/
"SLOPE) .I
,~
CAP /I
I4 (FLAT I
PLATE)
if
GENERAL,/
5(FLAT /
,,'PLATE) "
It
Figure 13. Library of Elements

CCDE ·TYPE
6 OPEN
7 OPEN
8 OPEN
9 OPEN
SHAPE
Figure 13. (Contd.)

FUll. CONTINUITY ATBOTH ENDS
CODE NUMBER: I
MEMBERS MONOLITHiCPINNED ENDS
CGeE NUMBER:2
MEMBERS AND ENDSPINNED
CODE NUMBER: 3
TOP CNDS LJXE CODE NO.1
BOT. ENOS LIKE CODE N03CODE NUMBER:4
TOP ENDS LIKE CODE na2BOT. €NDS LIKE CODE NO~3
CODE NUMBER:5
TOP ENDS, LIKE CODE NO.3BOT. ENDS UK£. CODE NO.1CODE NUMBER: 5
TOP ENDS LIKE c CODZ NO.3Bor . ENDS LIKE CODE N02CODE NU'AB£R: 7
Figure 14. End Conditions of Open Type Elements

-1./-
In the case of element types 1 to 3, the constants are actually the
six coefficients of the following equation of the meridian curve~
in which
AZ2 + BRZ + CR.2 + DZ + ER + F o
Rand Z are the coordinate defining points on the meridian (see
Figure 11); and A, B, C, D, E, and F are constants for the meridian curve
with the requirement that C should always be positive. In the case of ele-
ment types 4 and 5, it is required to specify the coefficients A and B
only, A being equal to the R-lo~ation of nodal point i,and B equal to ~e
R-location of nodal point (i+1), as shown in Figure 12. IIi the case
of element types 6 to 9, with the theoretical middle surface following
the shape of t:1:e frustum of a' cone, it is necessary to specify the
coefficients D, E, and F only.
The format of Element Cards will be as follows:
Columns Format Entry
1 - 3 I3 Element number
4 - 10 I7 Element type (in the case ofop~n typ~ elements see next page)
11 - 13 I3 Meridian definition code
14 - 24 Fll A coefficient
25 - 35 F11 B coefficient
36 - 46 Fll C coefficient
47 - 57 F11 D coefficient
58 - 68 Fll E coefficient
69 - 79 F11 F coefficient

-:w-
In the case of open type elements the entry in Columns 4 to·10
shall be
Columns Format:. Entry
4 - 8 1.5 Number of members in the element.
9 11 Code number for end conditions (seeFigu-re 1.4)
10 11 Element type

-29-
D. Nodal Point Cards
One card is requi.red for each nodal point, placed in numerical se
quence of nodal numbers. Nodal points must be numbered consecutively'
from the top to the bottom of a shell, or from the innermost part to
the outer part of a plate, beginning with nodal point number 1 (see
Figures 11, 12).
If some cards ar~ omitted" the omitted nodal, points are generated at
equal intervals between the defined nodal points. However, nodal point
cards for the first and~ nodal points must always be supplied.
Each nodal point card states the nodal point number, Z-coordinate
of the nodal point in global coordinate system and the geometric con-
straints corresponding to the displacement components u, v, w, S$' and
Sa at the nodal po~nt. When a displacement component is zero, the con
straint code number corresponding to that displacement component will be
1. When a non-zero displacement component is specified, the constraint
code number will be 2. If, however, the displacement component is not
constraine~ the code number will be zero (or blank). Constraint codes
for all omitted nodal point cards are set equal to zero. Thus, it is
necessary to provide data for all ~onstrained nodal points. The maximum
number of prescribed non-zero. constraints is limited to 10.
The format of Nodal Point Cards will be as follows:
Columns Format Entry
1 - 5 IS Nodal point number
6 15 FlO Nodal point location (Z-c90rdinatein global coordinate system)
16 - 20 IS Constraint Code for u-displacement

FIXED BASE(u =0,v=O,w=O,Pep=O,,8e=O)
TANGENTIALLY PINNED BASE
(u=O,v=O,w=O,!3e =0)
-30-
RADIALLY PINNED BASE(u=O, v=O,w=o,PcjJ=O)
FULLY PINNED BASE
(u=O v=O w=O). , )
Figure 15. Support Constraints for Open Type Elements

Columns Format
Zl - 25 IS
26 - 30 IS
31 - 35 IS
36 - 40 I5
4~ - 45 IS
-j.L-
Constraint Code for v-displacement
Constraint Code for w-displacement
Constraint Code for S~-rotation
Constraint Code for Sa-rotation
Blank or 1, the former signify thatthe support constraints refer to thecurvilinear reference frame and thelater signifies that the same referto the global cartesian reference frame
For the case of open type elements the suppor1;= constraints for various
Cnd conditions are shoTNU in Figure 15.

E. Materi~ Information Cards:
In the case of isotropic material, only one material info!'I!lation
car~ placed in nume~cal sequence of element numbers, is required for
each element. If some cards are omitted, the material information
for the omitted elements are set equal to those on the preceding card.
However mate~al infonnation cards for the first and~ eletnents
must be supplied. Each materlalinformation card states the eletllent
number, thickness of element, modulus of elasticity, Poisson's ratio,
shear factor, and mass density for the element. !n the case of open
tyPe elements, each material information card states the cross-
sectional area, torsional constant (Saint-Venant 1 s), modulus of
elasticity, moments of inertia about the circumferential and normal axes,
mass density, width and depth of the typical melllber, and Poisson t s
ratio. (.SQQ 'Figure. °16)
The format of Mater~al !nformat~on Cards for isotroEic material will
be a.s follows:
ColU1ml
1 - 3
4 - 12
13 - 21
22 - 30
31 - 39
40 - 48
49 - 57
F01:'mat
13
E9
E9
E9
E9
E9
E9
EntEZ
Element number
~~,kness of element at node. with snaller no:
'thickness of element at nQde with lUger no(hi+l)
Modulus of elasticity.f'
!'oisson r s ratio
Shear factor (default ~ 5/6)
Mass dens ity of material
The format of Matertal Information Cards for o'Oen t!f!e elements
will be as follows:

-33-
SHELL
NODAL CIRCLE 'i+\' 'c::::::==::1
'-----MEMBER OF OPENTYf'E ELEMENT
Figure 16.

-j.4-
Cross-sectional area of member
Moment of inertia about the normal axis
Element numb er
+ I )z
For wind effectFor cols. effect
on the shellFor temp. levels
Width of member (be)
Mass density of material (Y/g)
Torsional constant (10 = I
Modulus of elasticity
Moment of inertia about thecircumferential axis
Column Format
1 - 3 13
4 - 12 E9
13- 21 E9
22 - 30 E9
31 - 39 E9
40 48 E9
49 - 57 E9
58 - 66 E9
67 - 75 E9 Depth of member (d )c
76 - 80 F5 Poisson's ratio
Note: Maximum number of different values for Poisson's ratio for open-
type elements is 16.
In the case of single layer orthotropic or multi-layer materials
or framed structures, a set of three material information cards are
required for each element, placed in numerical sequence of element
numbers. If such card sets are omitted, the material information for
the omitted elements are set equal to those on the preceding set.
However, material property cards for the first and last elements must
always be supplied. In this case, the first material information card
for each element contains the element number, and thickness of element.
The second and third cards contain.the te~ elements of the constLtutive
matrix [C], Appendix B.
Format Entry
FlO CnFlO C12
FlO C22
FlO C33
FlO C44
FlO C45
FlO C55
FlO C66
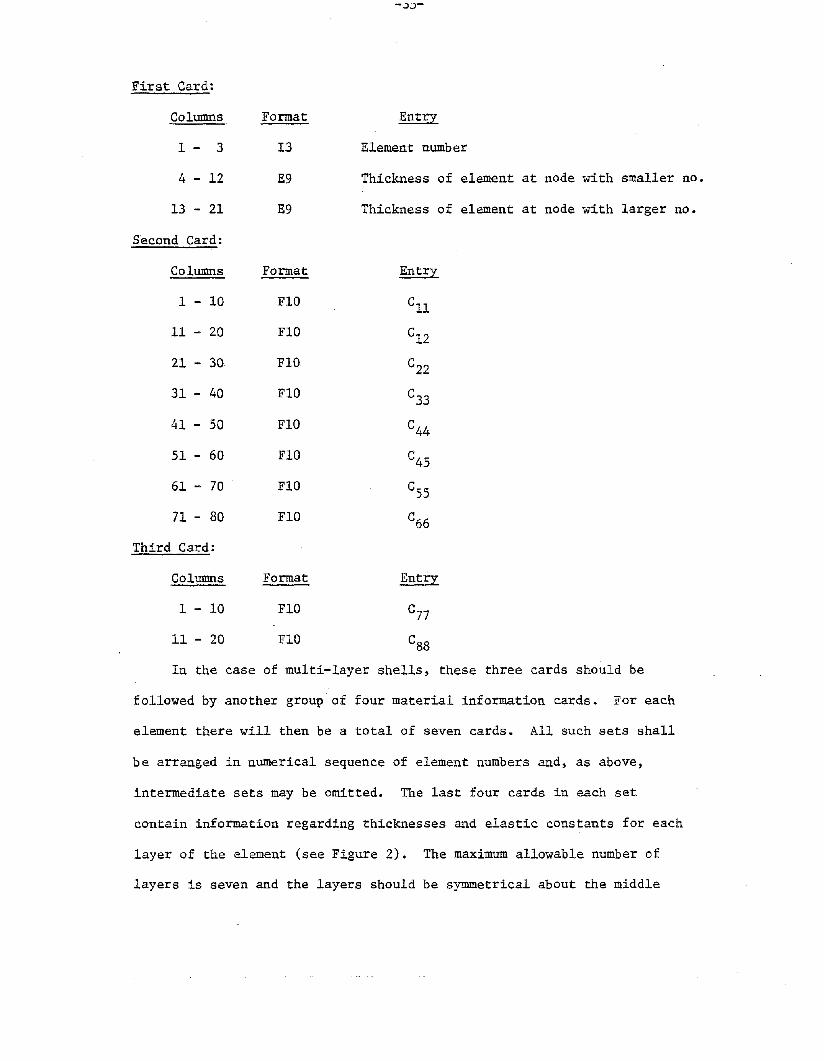
First Card:
Columns
1 - 3
4 - 12
13- 21
Second Card:
Columns
1 - 10
11- 20
21 - 30
31 - 40
41 - 50
51 - 60
61 - 70
71- 80
Third Card:
Columns
1 - 10
11 - 20
Format
13
E9
E9
Format
FlO
FlO
~
Element number
Thickness of element at node with smaller no.
Thickness of element at node with larger no.
In the case of multi-layer shells, these three cards should be
followed by another group of four material information cards. For each
element there will then be a total of seven cards. All such sets shall
be arranged in numerical sequence of element numbers and, as above,
intermediate sets may be omitted. The last four cards in each set
contain information regarding thicknesses and elastic constants for each
layer of the element (see Figure 2). The maximum allowable number of
layers is seven and the layers should be sYmmetrical about the middle

-.Jv-
surface in all respects. It may, however, be noted that if the number of
layers is even and/or the layers are unsymmetrical, the last four cards
in the set need not be provided since stresses cannot be computed.
The format of the additional sets of Material Information Cards for
multilayer materials will be as follows:
Fourth Card:
Columns
1 - 5
6 - 15
16 - 25
26 - 35
36 - 45
Fifth Card:
Columns
1 - 5
6 - 15
16 - 25
26 - 35
36 - 45
Sixth Card:
Columns
1 - 5
6 15
16 - 25
26 - 35
36 - 45
Format
IS
FlO
FlO
FlO
FlO
Format
FlO
FlO
FlO
FlO
Format
FlO
FlO
FlO
FlO
Element number
Thickness of middle layer (h )o
Thickness of layer next to middle (hI)'i.e. the outermost layer of a threelayer system
Thickness of layer next to hl(hZ)' i.e.the outermost layer of a five layer system
Thickness of layer next to h2 (h3), i.e.the outermost layer of a seven layer system
To be left blank
Modulus of elasticity in meridionaldirection (E~) for middle layer
- do - for layer '1'
- do - for layer '2'
- go - for layer '3'
To be left blank
Modulus of elasticity in circumferentialdirection (Ee) for middle layer
- do - for layer '1'
- do - for layer 'z'
- do - for layer '3'

-37-
Seventh Card:
Columns
1 - 5
6 - 15
16 - 25
26 - 35
36 - 45
Format
FlO
FlO
FlO
FlO
Entry
To be left blank.
Tangential shear modulus (G~e)for middle layer
- do - for layer '1'
- do - for layer '2'
- do - for layer '3'
When the number 0 f layers is threa, the· last two entries in each
of the above four cards should be left blank.. Similarly, in the case
of five layers the last entry in each of these cards should be left.
blank..

F. Displacement Function Card:
~ this card if columns 21-25 of the Problem Control Card are left
blank. For static analysis, it is recommended that 6 be used in each field
from columns 1-25. At the present time, it is recommended that the default
value be used for dynamic analysis [4]. Then, this card is not required., -
Otherwise, the degree of p~lynomial approximation for the displacement
functions to be used in forming the stiffness matrix (col. 1-25) and the
mass matrices (col. 26-50) may be specified shown below. However, the maxi-
mum permissible degree is 6. In the case of static analysis the columns 26
to 50 relating to the mass matrix should be left blank.
Column Format Entry
1 - 5 I5 Degree of polynomial approximationfor u
6 - 10 15 Degree of polynomial approximationfor v
11 - 15 IS Degree of polynomial approximationfor w
16 - 20 15 Degree of polynomial approximationfor e~
21 - 25 15 Degree of polynomial approximationfor Sa
26 - 30 15 Degree of polynomial approximationfor u
31 - 35 I5 Degree of polynomial approximationfor v
36 - 40 IS Degree-of polynomial approximationfor w
41 - 45 15 Degree of polynomial approximationfor Slj>
46 - 50 IS Degree of polynomial approximationfor aa

-39-
G. Output Requirement Cards:
a) Tne first card, the 'output control card', states the number of
circumferential locations where displacements, stresses, etc. in each
element are desired to be printed out, and also the number of inter-
mediate printout options desired. For available options see Appendix C.
The third field in this card represents the number of intermediate
stations within each element at which it is desired to compute displace-
ments and stresses. The default number is 5 and maximum is 9. The
fourth field states the number of modes to be considered in the case of
time history analysis by modal superposition (analysis type 2) or response
spectrum analysis (analysis type 3) and the sixth field indicates if it
is necessary to print out the input time history data for each time step
or the input response spectrum data. The seventh field to the sixteenth
field indicates the nodal points for detailed output and the corresponding
circumferential angle step for each node.
It should be noted that further output control information is
specified on the 'Loading Control Card', which is described later.
The format of Output Control Card will be as follows:
Columns
1 - 5
6 - 10
11 - 15
16 - 20
21 - 25
Format
IS
IS
IS
IS
IS
Number of circumferential locations wheredisplacements, stresses, etc. are desired(Maximum = 16)
Number of intermediate printout code numbersspecified (Maximum = 8)
Number of intermediate stations per elementwhere displacements, stresses, etc. aredesired (Maximum = 9; Default = 5)
1, if eigenvalues and eigenvectors arenot to be output; otherwise leave blank
Number of modes to be considered in analysistypes 2 and 3

Columns Format ~
26 - 30 15 1, if input time history, or responsespectrum data are to be printed out;otherwise leave blank
31 - 32 12 Node number at which detailed output isrequired (1st detailed node)
33 - 40 F8 Angle step for this node
41 42 12 Node number at which detailed output isrequired (2nd detailed node)
43 - 50 F8 Angle step for this node
71-72
73 - 80
12
F8
Node number at which detailed output isrequired (5th detailed node)
Angle step for this node
Note: Maximum number of nodes for detailed output is five.
The "Output Control Card" should be followed by "the nodal thickness
card" if columns 31 -+ 80 are not blank.
The format of the nodal thickness card shall be as follows: (5FIO.0)
Columns Format Entry
1 - 10 no Thickness of 1st detailed node
11- 20 FlO Thickness of 2nd detailed node
21 - 30 FlO Thickness of 3rd detailed node
31 - 40 FlO Thickness of 4th detailed node
41 - 50 flO Thickness of 5th detailed node
51 - 60 flO Last circumferential location at whichdetailed output is required (default = 180°)
If the first field of the output control card is not left blank,
the above card (cards) should be followed by the stated number of
circumferential location cards, one card for each location stating the

-4.L-
circumferential location (in degrees) where displacements, stresses,
etc., are to be output. The maximum number of locations is 16. If,
however, the first field of the output control card is left blank, no
circumferential location cards are required and results are output for
the location = 0° only.
If the second field in the output control card is not blank, the
circumferential location cards (if any) should be followed by the stated
number of intermediate printout option code cards, one card for each
option code. There are eight option code numbers, namely 86 to 93. For
a description of intermediate printouts corresponding to these option
codes, see Appendix C. If, however, columns 6 - 10 in the output control
card are left blank, no intermediate printout option code cards are
required.
The format of Circumferential Location Cards shall be as follows:
Columns
1 - 10
Format
FlO
Entry
Circumferential location in degrees
The format of Intermediate Printout Option Cards shall be as follows:
Columns Format Entry
1 - 5 15 Intermediate printout option code
b) In the case of time history analysis only, i.e. analysis types
2 and 4, one or more of the following cards are necessary. The first
card is called the 'time history output control card'. This card
states both the form and the extent of output desired. Any subsequent
cards are necessary only if the plotting option is utilized. It-is
possible to plot the displacement history, the stress resultant history
and the acceleration history. The maximum number of components allowed

for each case is ten. The response due to any number of harmonics be-
ginning with the first may be plotted. At the end~the sum total results
of all the stated harmonics at e - 00 are plotted. Flots can be obtained
either on the line prineer or off-line us:ing a 760/563 Calcomp Plotter System.
The format of Time History Output Control Card will be as follows:
Columns
1 - 5
6 - 10
11-13
16 - 20
21 - 25
26 - 30
31 - 35
36 - 40
41 - 45
46 - 50
Format
IS
IS
15
IS
15
15
I5
IS
IS
1~ if absolute maximum displacementsare to be printed; otherwise leaveblank.
1, if maximum displacements are tobe printed (at given time step' ,inte~u); otherwise leave blank..
l~ if displacements are to be printedat given time step interval; otherwiseleave blank:
The number of displacement components for which time histories areto be plotted (Maximum • 10).
1, if absolute maximum stress result~ts are to be printed; otherwiseleave· blank.
l~ if maximum stress resultants areto be printed (at given time stepinterval);otherwise leave blank.
1, if stress resultants and stresscomponents are to be printed at a giventime step interval; otherwise leave blank.
The number of stress resultant components for which time histories areto be plotted (Maximum - 10).
1, if absolute maximum relativeaccelerations are to be printed;othe~ise leave blank. .
1, if maximum relative accelerationsat given time step interval are tobe printed; oth.wl.se leave blank.

Columns
51 -55
56 - 60
61 - 65
Format
IS
15
IS
1, if maximum relative accelerationat given time step intervals arer.o be printed; -othe1'"Wise leave b1ank..
The number of~ acceleration components for which time histories are tobe plotted (Maximum. 10).
1, if maximum total accelerations atgiven time step intervals are to beprinted; otherwise leave blank.
Relative accelerations can be output in the case of base acceleration
only and hence should not be specified for otner loading cases. Moreover,
even in the case of base acceleration, either relative acceleration or
total acceleration can be output, not both. If the columns 16-20, 36-40,
and 56-60 of the above card are not blank, an additional data card is re-
quired for each, placed in the same order. On each of these cards, the
global degrees of freedom (in increasing order) corresponding t.o which
plots are desired, shall be stated. The maximum number of degrees of
freedom in each case is limited to ten. In the case o·f displacements and
accelerations, the five degrees of freedom at each node correspond to u,
v, w, a~ and 6e respectively.' In the case of stress resultants, the
five degrees of freedom at each node will refer to N$' Ne, M$' Me' and
Qlfl' respectively, for the purpose of plots only. For instance, for
node number N, the global degrees of freedom for these displacements
(or stJ:BSS resultants) will be (SN -. 4), (5N - 3), (5N, _. Z), (5N - 1), 5N
respectively. _

'!he format. of these Degrees of Freedom Cards shall be as follows:
Columns Format Entry
1 - 5 I5 Global degree of freedom
6 - 10 I5 Global. degree of freedom
etc. etc. etc..

H. Control Data Cards for Dynamic Analysis:
Omit this section in the case of static analysis.
a) The first card in this section t called the t mas s matri.x
card~~efines.whethera lumped mass or a consistent mass matrix is to be
used. However, the consistent mass matrix is always preferable in the
opinion of the authors.
The format of Mass Matrix Card shall be as follows:
ColUlllIls
1 - 5
Format
F5 l.Ot if lumped mass matrix is tobe used; otherwise leave blank
b) ~ this card if the analysis type is equal to 4. This second
card is called the 'eigenvalue analysis card'. Here the eigenV".uue Pi is
tL~ square of die inverse of the c:'.~~ular frequency lA)i';
The format of Eigenvalue Analysis Card shall be as follows:
Columns
1 - 5
Format
F5 1.0, if eigenvectors are not desired; otherwise leave blank
6 - 15 FlO
16 - 25 flO
Upper limit for range of eigen-value CPU)
Lower limit for range of eigen-value CPt)
26 - 30
31 - 35
F5
F5
Blankt if all roots over the rangep... , PL are desired; otherwise, statethe desired n~ber of first rootsover the range (PUt PL)
Blank if the eigenvector is to be..!!2!:malized with respect to the largestcomponent; otherwise, state ·thedegree of freedom with respect towhich the normalization is to be dOl...

Columns
36 - 46
47 - 56
Format
EIO
EIO
Precision of root separation duringthe isolation of individual roots(Default value - 1.OE-lO)
Convergence tolerance factor for theeigenvalues (Default value • 0.001)
Rere the eigenvalue~ A~ is equal to l/w2 , where w is the circular
frequency in rad./sec. The assigned value of Pu may be based on a rough
estimate [2, J~ or a suitable guess. In most e'ases, the va~ue,
of PL will be set to zero. The output will be helpful in determining if
a proper choice of Pu has been made with respect to the fundamental'fre-
queney, as discussed in t.he nut. section.
The parameter described as the 'precision of root separation' is re-
quired for isolat~ng the desired number of roots,to this accuracy, over
the given range, by the Sturm sequence procedure.
The parameter described as the 'convergence tolerance factor' is
used for checking the accuracy of root convergence during the location of
roots by the inverse iteration technique. Thus~ a~ the end of the r th
step IAr -: Ar _l ' / IAr I will be the measure of convergence, and if this
value happens to be less than the convergence tolerance factor (usually
set between 0.001 and 0.0001) then Ar is taken to be equal to Ar+l'
c) Omit this card if the analysis type is equal to 1.- This card, the-
t dynamie .load type card', sta1:11S "one (tt me following code 1nmIbers to
q.f!serlbe the nature of loading,.
External dynamic loading (mechanicalor thermal)
Horizontal base acceleration
Vertical base acceleration
2
3
4

The format of Dynamic Load Type Card shall be as follows:
Columns Format Entry
1 - 5 I5 Relevant code number for load type

1. Soil Cards:
Omit this section if columns 41 - 45 of the Problem Control Card
are left blank.
a) The first card, the 'Soil Control Card', states the number of
horizontal soil layers beneath the ring footing, the type of element
data generation, the upper limit harmonic number for which the soil
formulation is to be applied, the output of the soil analysis, the ring
footing data, and, finally, the driving frequency of the soil analysis
as well as the damping ratio for such analysis. The format for the
'Soil Control Card' shall be as follows:
Columns
1 - 5
6 - 10
11 - 15
16 - 20
Format
IS
IS
IS
IS
Total number of layers. If the total numberis 1, elastic half space to be assumed.
Flag for elements data. If 0, data to begenerated. If 1, data to be supplied.
*Limit for the number of harmonics for theEBS. If 0, all harmonics to be considered.
Flag for the intermediate soil analysisresults output. If 0, no intermediate resultsto be printed out.
21
31
30
40
-FIO.O
FIO.O
Outer radius of the ring footing.
Width of the ring footing.
41 - 50
51 - 60
FlO.O
FIO.O
*Driving frequency (rad/sec)
Soil damping (percentage of critical damping).
b) The 'Soil Control Card' shall be followed by the 'layers informa-
tion cards' which consist of a card for each layer containing the material
properties and thickness of the layer.
*For explanation see Theoretical Manual and the Example Problems.

The format of each card placed in order shall be as follows:
Columns Format Entry
1 - 10 ElO.4 Shear modulus of the layer
H- 2O ElO.4 Poisson's ratio of the layer
21 - 30 ElO.4 Weight density of the layer
31 - 40 ElO.4 Thickness of the layer
c) If the columns 6 - 10 in the 'Soil Control Card' are not left
blank, the 'Soil Elements Data Cards' must be supplied. These cards
consist of one control card and material and geometry cards.
The first card in the 'Soil Elements Data Cards' shall contain the
number of different materials in the core region. Its format shall be
as follows:
Columns
1 - 5
Format
15 Number of different materials in the FiniteElement region of the soil model
Note: the total number of different materials input may be greater
than the true number of different materials due to the fact that
each material has to be considered as a new material for a group of
elements in succession (see example number 3 in Appendix G).
The following cards are the material information cards and' they
consist of a number of cards equal to the number of different materials
preceding them. The format is as follows:
Columns Format Entry
1 - 5 15 The number of first element for thegiven materi~l property
6 - 10 15 The number of last element for the givenmaterial property
11- 20 ElO.4 Shear modulus
21 - 30 E1O.4 Poisson's ratio
31 - 40 ElO.4 Weight density

-50-
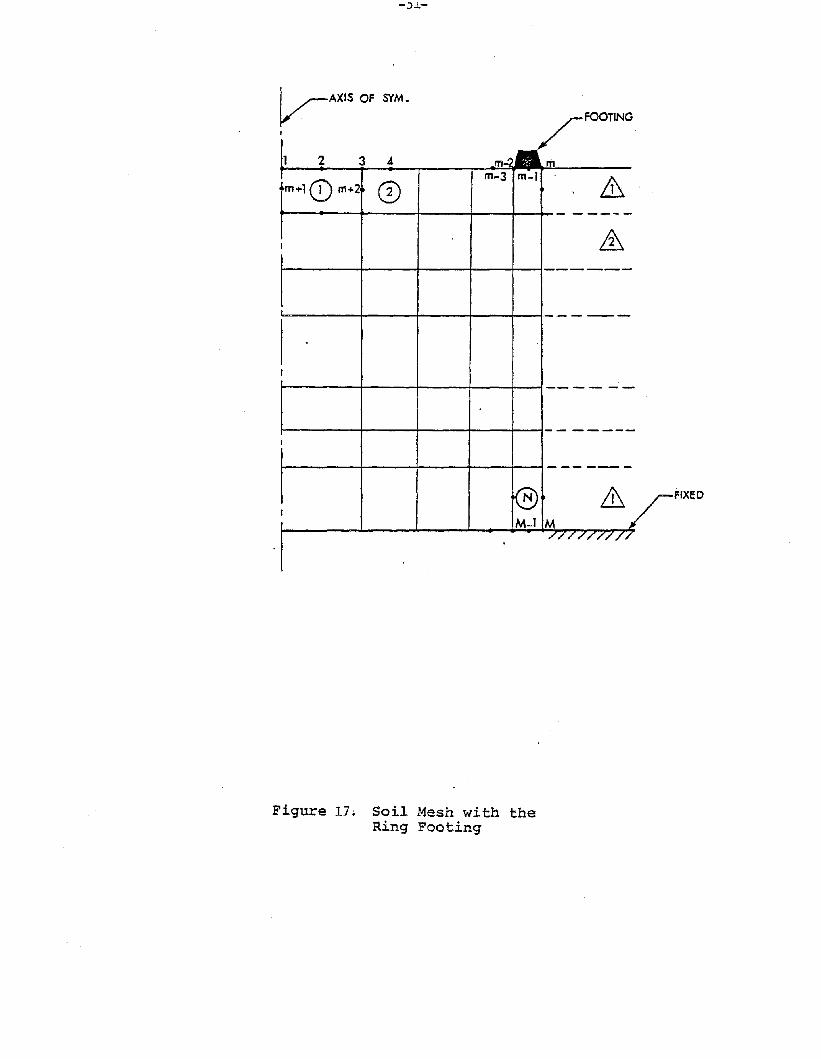
The following cards are the nodal point cards for the soil elements
and they consist of NE cards, where NE equals twice the total number of
elements in the FE zone (see Figure 17). The total number of elements
must be 4 NL where NL is the total number of layers (if NL=l, for the
elastic half space case, the total number of elements shall be 24 elements).
For each element there shall be two cards, the first containing the
radial coordinates of the eight nodes and the second containing the
vertical coordinates of the nodes (see Figure 18).
The format of either card shall be as follows (starting with element
number one and finishing with element number NE):
Columns
1 - 10
11 - 20
21 - 30
Format
FlO.O
FlO.O
FlO.O
Entry
Radial (vertical) coordinate of 1st node
DO for 2nd node
DO for 3rd node
71 - 80 FIO.O DO '" for 8th node
d) The last group of cards in this section is the 'Fourier Harmonic
Numbers Cards', one card for each harmoinc. The total number of these
data cards group is equal to the total number of harmonics specified
in the problem control card. However if columns 11 - 15 in the 'Soil
Control Card' are not blank, only the limit number of harmonics must
be supplied.
The format of the 'Fourier Harmonic Numbers Cards' are as follows:
Columns
1 - 5
Format
15 Harmonic number
Note: For soil analysis, only harmonics zero and 1 are available.
-.:>.L-
FIXEO
/FOOTING.
V-AX1S OF S'fM.
1 2 3 .:1 m-.m
1m+l Q) m+2m-3 m-l .
&CD- -----
I .&----
. -----
I
---- --
-- -----I
------
~ &I
M-I M/////////
Figure 17; Soil Mesh with theRing Footing

,..---------------JlI~ r2
z
Figure 18. Isoparametric QuadraticSolid Element
J. Loading Information Cards:
For each harmonic, there shall be one title card, the 'load -
title card', followed by a control card, the 'loading control card'.
These cards are further followed by one or all of the following
sets of additional cards, excepting in the case of analysis types
1 and 3.
a) Distri.buted Loading Cards - For each region, extending over one
or more elements, one card is required with the distributed loading Fouriet
coefficients being either constant or linearly varying between the first
and last nodal points of that region.
b) Concentrated Loading Cards - One card is required for each nodal
point.
c) Thermal Loading Cards - For each temperature region) extending
over one or more elements, one card is required with the thermal Fourier
coefficients being either constant or linearly varying between the first
and las~ nodal points of that region.
d) Displacement Cards - For each node With specified displacements,
one card is requi~ed. The maximum permissible number of specified dis-
placement components happens to be ten.
The format for the Load Title Card shall be as follows:
Columns
2 - 80
Format
A Any alphanumeric informationidentifying the load
The information to be supplied on th~ Loading Control Card ~re -the
harmonic numbers (0,1,2,3, etc.), the numbers of distributed loading cards,

concentrated nodal loading cards, thermal loading cards and displacement
cards to follow, printout option code (0, or 1, or 2, or 3), gravity
loading option, reference temperature (i.e. stress free temperature, and
the angle which· the line of symmetry for loadinlt makes with the e • 00 line).
The gravity loading option (valid for static analysis only) is
applicable to harmonics a and 1 only. If it is desired to include
the effect of gravity loading (or a fraction thereof), it is necessary
to set the gravity loading option equal to the weight density of the shell
material (or an appropriate fraction thereof). This option .. applies to the
zero harmonic when the gravity loading is in Z-direction and to
harmonic number 1 when it is in the R-direction. If static an~ysis
due to gravity loading is not desired, the corresponding columns in
the loading control card should be left blank. No distributed loading
cards are required for ~avity loading.
Printout opt1l1n"codes'control the output in the following manner.
Printout Option Code
a
1
2
3
Description of Printout
- No result will 'be printed for thecurrent harmonic loading case
- Printout will be provided for thecurrent harmonic loading only
- Printout will be provided for thesubtotal results of all harmonicloadings up to and including thecurrent harmonic loading
- Printout will be provided for thecurrent harmonic loading and alsothe subtotal results of all harmonicloadings up to and including thecurrent harmonic loading
.,
Regardless of the printout option codes specified for different
harmonic loading cases, a printout of the total results is automatically
provided after the final harmonic loading case is completed. The user is
cautioned that codes 1 and 2 may produce very volumnious output if several
harmonics are present.

The format of Loading Centrol Card for each harmon±~will be as fol-
lows:
Number of distributed loading cardsto follow
Harmonic number
Number of concentrated loading cardsto follow
Number of displacement cards to follow(Maximum .. 10)
Number of thermal loading cards tofollow
Print-out option co~e
Reference temperature
Gravity loading option(Blank or weight density)
Columns Format
1 - 5 IS
6 - 10 IS
11 - 15 IS
16 - 20 I5
Zl - 25 IS
26 - 30 IS
31 - 40 FlO
41 - SO FlO
51 - 60 FlO Blank, if loading is symmetricalabout e .. 0 0
90.0» if loading is symmetricalabout e .. 90 0
With respect to the data in· columns 51-60, it may further be stated
that if, for instance, for a particular harmonic the loading in the
u-direction and w-direction consists of a cosine term and that in
v-direction a sine 1:ertn» these columns should be left blank. On the
other hand, if the case is reversed, i.e., the sine term is
associated with the u-direction and w-direction and the cosine term
with v-direction, the value in these columns should be 90.0. In the
-following cards the paren1:he1:1cal values of e refer 1:0 the 1at1:er case.
The format of Distr1.buted Loading Cards for each harmonic will be as
follows:

Columns
1 - 5
6 - 10
u - 20
21 - 30
31 - 40
41 - 50
51 - 60
61 - 70
Format
IS
FlO
FlO
FlO
FlO
FlO
FlO
Entry
Nodal point where loading begins
Nodal point where loading ends
Magnitude of distributed loadingFourier coefficient in u-di.rec:tionat the beginning of nodal point ate .. 0° (or e .. 90°)
Magnitude of distributed loadingFourier coefficient in u-directionat the ~ nodal point at e .. 0°(or e .. 90°)
Magnitude of distributed loadingFourier coefficient in v-directionat the beginning nodal point ate .. 90° (or e .. 0°)
Magnitude of distributed loadingFourier coefficient in v-directionat the end nodal point at e .. 90°.(or e ..()'O)
Magnitude of distributed loadingFourier coefficient in w-directionat the beginning nodal point at&.. 0° (or e .. 90°)
Magnitude of distributed loadingFourier coefficient in w-directionat the end nodal point at e .. 0°(or e .. 90°)
The format of-Concentrated Nodal Circle Loading Cards for each har-
monic will be as follows:
Columns
1 - 5
6 - 15
16 - 25
26 - 35
Format
IS
FlO
FlO
FlO
Nodal point number
Fourier coefficient of line loadin u-di.rection at e .. 0° (or e .. 90°)
Fourier coefficient of line load inv-direction at e .. 90° (or e .. 0°)
Fourier coefficient of line load inw-direction at e .. 0° (or e .. 90°)

Columns Format Entry
36 - 45 FlO Fourier coefficient of line load inB~ direction at e :z 0° (or e .. 90°)
46 - 55 FlO Fourier coefficient of line load inBe direction at 0 ::I 90° (or e .. 0°)
The format of Thermal Loading Cards for each harmonic shall be asfollows:
Columns ~ Format
1 - 5 Nodal point where the thermal loadbegins
6 - 10 I5 Nodal point where the thermal loadends
11 - 20 FlO Magnitude of the~ surface temperature Fourier coefficient at thebeginning node point
21 - 30 FlO Magnitude of the inner surface temperature Fourier ~icient at thebeginning node point
31 - 40 FlO Magnitude of the outer surface temperature Fourier co;t£icient atthe ~ node point
41 - 50 FlO Magnitude of the inner surface temperature Fourier coefficient atthe ~ node point
FlO51 - 60 Coefficient of thermal expansionfor t:he region ._
The format of·Displacement Cards for each harmonic will be as follows:
Columns Fomat Entry
1 - 5 IS Node number
6 - 15 flO Fourier coefficients for u-displacementat e .. 0° (or e .. 90°)
16 - 25 flO Fourier coefficient for v-displacementat e -. 90° (or e - 0°)
26 - 35 FlO Fourier coefficient for w-displacementat e ::I 0° (or e .. 90°)
36 - 45 flO Fourier coefficient for Brrotationat e ::I 0° (or e .. 90°)
46 - 55 FlO Fourier coefficient for Be-rotationat e ::I 90° (or e :or 0°)

-JO-
K. Control Cards for Dynamic Analysis by Direct Integration:
Omit this section if the analysis type is not equal to 4. In
most cases, it is very helpful to run a free vibration analysis
(Type 1) before carrying out a Type 4 analysis. The following cards
are needed under this group.
a) The first card, c;.a1led the 'direct integration scheme
card', states the integration scheme to be used and the values of control
parameters for the scheme. The details of three alternative schemes are
given in Appendix 1).
The code numbers for integration schemes,
Single step higher derivation scheme 1
Modified single step higher derivationschem~ 2
Four-step scheme .3
The format of Direct Integration Scheme Card shall be as follows:
Columns Format Entry
1 - 5 IS Code number for integration scheme(1, or 2, or 3) Default scheme: 2
6 - 13 FS *Value parameter P1
14 - 21 FS Value parameter P2
22 - 29 F8 Value parameter P3
30 - 37 F8 Value parameter P4
3S - 45 FS Value parameter P5
46 - 53 FS Value parameter P6
54 - 61 FS Value parameter P7
62 - 69 F8 Value parameter P8
* For values of parameters P1 to PS see _;b.ppendix Do. _ !n the case ofthe default scheme (Code number = 2)>> P1 is taken as 1.4.

-::>~-
b) The next card is called t.he 'data card for dynamic
analysis'. It contains the coefficients (CG and Cl) of the proportional
da1ll9ing mat't'u - (CO~ls scalar multip~ier for time functions total .
numbe't' of records in the input time function, number of different time
step lengths to be used, number of time steps between the printing and
the plotting of stress resultants, displacements, etc., number of har-
monics for which the time histories are to be plotted, the initial and
final step numbers for plotting histories, the plotting device to be
used (line printer or the Calcomp plotter) or the punched output cards,
printer plot spacing, and code number which signifies whether or not the
analysis is being > carried out for base acceleration.
The format of Data Card for Dynamic Analysis shall be as follows:
Columns Format
1 - 10 FlO
11 - 20 FlO
21 - 30 flO
31 - 35 IS
36 - 40 I5
41 - 45 IS
Coefficient 'CO t of proportionaldamping matrix
Coefficient ' ('''1' of proportional.damping matrix
Scalar multiplier for eheinput:time function
Total number of record prints inthe input time function
Number of different time step lengthsto be used (Maximum· 4)
Number of time steps between theprinting of maximum displacements,stress resultants, etc.
46 - 50 . IS Number. of time steps between ~he
printing and plotting of displacements,stress resultants, stress components,etc.

Columns
51 - 55
56 - 60
61 - 65
66 - 70
71 - 75
76 - 80
Format
15
15
15
15
IS
IS
-vv-
Number of harmonics for which the historiesare to be plotted
The initial time step for plotting thehistories
The final time step for plotting thehistories
Code number of plotter ( = 1, printer plot;= 2, Ca1comp plot). If blank punched outputwill be generated.
Printer plot spacing (Default = 1)
1, loading is due to base acceleration;otherwise leave blank
The above card may be repeated for each harmonic provided that the
column 35 in the problem control card is not left blank.
Note: The punched cards option can be very useful as the plotting sub-
routines are installation dependent (see the overlay structure of
Figure 4) and by choosing such option one may use the punched time
history with the appropriate local plotting routine available. A ~lotting
Program suitable for a 760/563 Calcomp Plotter system is given in
Appendix F (Program 'TRPLOT').
c) The next card, called the 'initial condition control card',
specifies whether the nodal displacements, or velocities or accelerations
are non-zero at the starting time.
The format of Initial Condition Control Card shall be as follows:
Columns Format ~
1 - 5 15 1, if the in~tial nodal displacementsare non-zero; otherwise leave blank
6 - 10 IS 1, if the initial nodal velocitiesare non-zero; otherwise leave blank
11 - 15 IS 1, if the initial nodal accelerationsare non-zero; otherwise leave blank

-O.l.-
In the above card only one of the three responses may be taken
as non-zero. In the case of earthquake loading it is preferable to use
a blank card.
d) The following card, called the 'time step control card', gives
the time step length and the record point number of the input time function
up to which it is to be used. A maximum number of five time steps can be
specified, provided that all time steps are integral multiples of the
smallest time step specified. In order to reduce the effect of artificial
damping introduced by the integration scheme it is desirable that the
maximum time step length used be not more than, say, one-tenth the
smallest natural period.
The format of Time Step Control Card shall be as follows:
Columns Format Entry
1 - 10 FlO First time step
11 - 15 15 The last record point number, for thisstep, in the input function
16 - 25 FlO Second time step
26 - 30 15 The last record point number, for thisstep, in the input function
etc. etc. etc.
Note: In the case of a fixed foundation, one should be especially
careful in choosing the time steps for the numerical integration.
Relatively large time steps may cause numerical instability and the
solution may diverge instead of converging (see Example number 8).
e) The next card is the 'title card·for input time functiou'. This-
card is required only if the column 30 of the Output Control Card is
net left blank.

-0"::-
The format of Title Card for Input Time Function shall be as follows:
Columns
2 - 72
Format
A Alphan~ric information about the loadfunction
f) The next card (or cards), called the 'record points card',
provides the record points of the time history input function, which may<#
be the multiplication factors for any mechanical or thermal loading or
the base acceleration (vertical or horizontal) due to earthquake. In the
case of multiple loading, the multiplication factors should reflect the
net effect of all the components. It is necessary to provide this card
(or cards) for each harmonic only if these factors are different for
different harmonics and column 40 or Problem Control Card is not left
blank.
The format of Record Points Card(s) shall be as follows:
Columns Format Entry
1 - 10 FlO Time
11- 20 FlO Value
21 - 30 FlO Time
31 - 40 ~10 Value
etc. etc. etc.
There can be a maximum of four pairs of data per card.
-oj-
L. Data Cards for Dynamic Analysis by Response Spectrum
~ this section if the analysis type is not equal to 3.
a) The first card is the 'modal damping ratio card' and gives the
damping ratio to be used for each mode.
The format of Modal Damning Ratio Card shall be as follows:
Columns Format Entry
1 - 5 15 Mode number
6 -15 FlO Damping ratio
16 - 20 IS Mode number
21 - 30 FlO Damping ratio
etc. etc. etc.
Each damping ratio card may contain a maximum of five pairs of
data. ''the maximum number of modes that can be considered has
been limited to ten.
b) The next card, to be called as the 'response spectrum data title
card', is needed only if the column 30 of output control card is not left
blank.
The format of Response Spectrum Data Title Card shall be as follows:
Columns Format
A2 - 72 Any alphanumeric information describing the response spectrum data
c) The neX1: card, ca'lied the 'e.o:tltr~l'.ca·rd for ,response- .
spectrum', gives information such as the number of damping ratios for ,which
the data is given, the number of record points for each damping ratio,
whether the data consists of spectral velocity or spectral acceleration,
and the scale factor for the spectral values.

The format of Control Card for Response Spectrtml shall be as follows:
Columns
1 - 5
6 - 10
11 - 15
16 - 25
Format
IS
IS
IS
FlO
Entu
Number of 'damping ratios for wh:Lch response spec1:rum data is given (Maximum :I 8)
Number of record points for eachd.a.mPing ratio
1, if spectral velocity is given2, if spectral acceleration is given
Scale factor for spectral values(Default • 1)
d) The next card gives the values of damping ratios corresponding
to which the response spectrum data is given.
The format of Spectral Damping Ratio Cards shall be as follows:
Columns Format Entry
1 - 10 FlO Damping ratio no. 1
11 - 20 FlO Damping ratio no. 2
21 - 30 FlO Damping ratio no. 3
31 - 40 no Damping ratio no. 4
etc. etc. etc.
e) The following cards, called the tspectral value,. cards , ,
give the frequencies (starting from the highest and going towards the
lowest) and the corresponding spectral values correspondi:ng.tG each damping
ratio at a time starting with damping ratio no. 1.
The format of Spectral Value Cards shall be as follows:

-0;.1-
Columns Format Entry
1 - 10 FlO Frequency (Hz)
11- 20 FlO Spectral value
21 - 30 FlO Frequency (Hz)
31 - 40 no Spectral value
etc. etc. etc.
There can be a maximum of four pairs of data per card.
-00-
M. Last Control Card:
This card signals termination of job and is the last data car.d t.o
be provided in a job. Preceeding this card the data cards for any number
of problems can be placed.
The format of Last Control Card shall be as follows:
Columns Format Entry
1 - 6 A JlbBEND

SIlORE-IYP,ROGRAM 'OUTPUT
Typical examples of actual ou~put will be supplied on request,
Printouts for Input Data;
All input data for each problem are printed out in suitable formats
in order that the user can verify them easily. Moreover, as mentioned
earlier, an echo (i..e. card image) of the input data can also be printed
out.
Various checks are performed by the program internally and obvious
errors cause a run to terminate, after printing out the error messages,
before execution of the probl~ takes place.
Printouts for Results:
In the case of Static Analysis, the results of computations printed
out: by the program 0, a:re'comprised:o£ :th,e' £91l0win"g: _
1) For each harmonic number, a table of nodal point displacement
components Cu, v, w. e~ and ee, for sign conveut±on see Figure 2 ) is
printed out together with Z-location of all nodal points.
2) Depending, on the printout option code specified in the Loading
Control Card for a harmonic loading case, tables o~ displacements, stress
resultants (N~, Ne, NiPe, HiP' Me, QiP' and Qa, for sign convention see
Figure 1 ), and stress components (a~, aa, a$6' aI' 02 and aeq) are printed
out: for each e.lement at the nodal points and at the specified number of
intermediate points. The stresses SIGMA(l) (i.e., ( 1) and SIGMA(2) (i.e.,
( 2) are the. principle. stresses"wb:~ ,S!GMA(EQUI) (i..e..) <!eq) is an
equivalent stress, corresponding to von Mises-yield criterion, defined by

-68-
the expression
0'eq
The meridional length of the element and its thickness at the top and
bottom nodes are also given. The non-dimensionalized arc length variable
s is used to define locations along each meridian curve and this variable
ranges from 0 at the top to 1 at the bottom node of an element. In the
case of open-type elements the displacements and forces
M ,Y
F.... , Fy ' F , M ,.... z x
and M (for sign convention see Figure 3) at the end o·f the membersz
are printed out. Moreover, the length(s) of the member(s) is also
printed out.
In the case of Free Vibration Analysis. the results printed out by
., the. program. m~y .1X1clude.• the .. following.:. ..
1) A table giving information on isolated roots is printed out. If
in the first line of this table, the number of roots with
values less than the upper limit for P (i.e. Pu) happens to be
less than the order of stiffness or mass matrix, it signifies
that number of lowest frequencies e~l to the difference has
been missed. In that case, the problem should be rerun after
suitably increasing the value of Pu•
2) The eigenvalues, circular freque~cies (rad/sec), and cyclic fre
quency (Hz) for all the desired modes in each harmonic are
printed out.
3) Depending upon the printout option used in the Eigenvalue Analysis ..
Card, the normalized eigenvectors corresponding to each mode are
printed out.

-b~-
In the case of Response Spectrum Analysis, the results of computation
printed out by the program may comprise of the following:
1) Results same as those for the .Free Vibration Analysts a:r~printed.out.
2) Tables of maximum displacements, accelerations, and stress resul
tants for each mode are printed out.
3) Tables of root mean square values of maximum displacements,
accelerations, and stress resultants for each mode are printed
out.
In the case of Time History Analysis by Direct Integration, the re
sults of computation printed out by the program may include the fol
lowing:
1) Depending upon the printout option codes specified in the Time
History Output Control Card, tables of absolute maximum displacements,
and/or accelerations (relative or total), and/or stress resultants are
printed out for each harmonic. !he time instants at which such maxima
occur are also printed out in the same table. If, however, the bottom
element of the shell happens to be open-type, the stress resultants
at the base of the shell are printed out as zero, irrespective of
the support conditions of the members'of the open type element.
Again, if the maximum responses at a given number of time step intervals
are desired, similar tables with the time range number stated therein are
printed out.
2) If the relevant option code is specified in the Time History Control
Card (and Loading Control Card), stress resultants, stress components,
and displacements at a specified number of time step intervals1n the form
of tables similar to those described for static analysis are printed out.
The instant of time for which the values are valid are also printed out.
Plots for Time History Response:
Two alternative kinds of plots are possible, namely the printer plot
and the Calcomp plot. The plots can be for the displacement Fourier coeffi
cient history, and/or the total acceleration Fourier coefficient history,
and/or the stress result:ant Fourier coefficient history. Before actual
plotting is done the components to be plott:ed, their maximum values, and
the instant of time when the maxima occurs are tabulated. The components
are defined by the node and the component: numbers 1, 2, 3, 4, and 5, which,
respectively, stand for the components along u, v, w, S4>' and Se in the
case of displacements and accelerations, and N4>' Ne, M4>' Me, and Q~ in the
case of stress resultants. First the plotting is done for the individual
harmonics and is then followed at the end by resultant plots for all the
specified harmenics corresponding. to the refe.rence position e sa 0°.
When the Calcomp plot option is specified r a table of plotted values,
for each harmonic only are printed out. In this case the program actually
creates a plot tape to finally carry out off-line plotting on a 760/S63
Calcomp plotter system.
Time Log Printout:
At the end of each problem a time-log for the problem is printed out.
The time-log states the CPU time in seconds required to execute different
sections of a problem.

-71-
ACKNOWLEDGEMENTS
This work was partially supported under NSF Grant No. PF~-7900012..-=
However. any opinions. findings. conclusions or reco~endations expressed
herein are those of the authors' and do not necessarily reflect the views
of NSF.
The authors gratefully acknowledge the cooperation of Washington Uni
versity Computing Facility staff.

-U.-
APPENDIX A
SYSTEM CONTROL CARDS
The image of the system control cards used to run SHORE-IV from
permanent file (WU65(i1E.SH(i1RSS) at WashingtonpniverSity Computing Facility
using an IBM 360/65 computer is shown below. If, in the case of time
history analysis by direct integration, the printer plot option is used,
the last four devices are to be ~eplaced by three scratch tapes (Nos. 26,
27, 28 with data set names NTAP8, NTAP9, NTAPIO, respectively).
IIA EXEC FORTRAN.LIBRARY=·WU6S0E.SHORSS·,PROGRAM=SHORSSIIGO.FT09FOOI -00 U~IT=SYSOA.SPACE=(TRK,(2S.51,RLSEI .OCB=(RECFM~YBS,II LRECL=84,BLKSIlE=844 6UFNO=11IIGO.FTIOFOOl 00 UNIT=SYSOA,SPACE=l72,(5,111,OCB=IRECFM=VBS,LRECL=68,II BLKSIlE=72 BUFNO=31IIGO.FTIIFOOI 00 UNIT=SY~OA,SPACE=(TRK,(l,l)1,OCB=(RECFM=VBS,LRECL=112,II BLKSllE=188,3UFNO=11IIGO.FT12FOOl DO UNIT=SYSOA,SPACE=(TRK,(lS,SII,OCB=(RECFM-VBS,II LRECL=1148,BLKSIlE=11S2,BUFNO=11IIGO.FT13FOOl 00 UNIT=SYSOA,SPACE=(TRK,118,111 ,OC8=(RECFM=VBS,II LRECL=3700,BLKSIZE=3704,BUFNO=11IIGO.FT14FOOl 00 UNIT=SYSOA,SPACE=ITRK,(6,111 ,OCB=(RECFM-YBS,I I LRECL= S204, BLKS I ZE=S208, 8UFNO=l)IIGO.FT15FOOl DO UNIT-SYSDA,SPACE=(TRK,(lO,71 ,RLSEI,OCB=(RECFM-Y8S,II LRECL=S24,BLKSIZE=S28,8UFNO=11IIGO.FT16FOOl DO U~IT=SYSOA,SPACE=(TRK,15,11,RLSEI,DCB=(RECFM=V8S,II LRECL=1604,8LKSIZE=1608,8UFNO=11IIGO.FT17FOOl 00 UNIT=SYSOA,SPACE=(TRK.(S,21),OC8=(RECFM-YBS.II LRECL=1156.BLKSIlE=1160,BUFNO=11I/GO.FTl8FOOl DO U~JI T=SYSOA,SPACE=( TRK, (10 ,SI ,RLSEI ,OCB=·( RECFM-YBS,II LRECL=1148,8LKSIZE=1152,BUFNO=11IIGO.FT19FOOl 00 UNIT=SYSOA,SPACE=(TRK,(S,SI,RLSEI ,OCB=(RECFM=YBS,II LRECL=164,BLKSIZE=168,BUFNO=11IIGO.FT20FOOI 00 UNIT=SYSOA,SPACE=(TRK,IS,SI,RLSEI,DCB=(RECFM=VBS,II LRECL=324,BLKSIZE~328,BUFNO=11IIGO.FT21FOOl DO UNIT=SYSOA,SPACE=(TRK,15,51,RLSEJ ,OC8=(RECFM=VBS,II LRECL=324,BLKSIZE=328,BUFNO=11IIGO.FT22FOOl 00 UNIT=SYSOA,SPACE=(TRK,(l,ll,RLSEI ,OCB=(RECFM=YBS,II LRECL=84,8LKSIZE=340.BUFNO=11IIGO.FT23FOOl 00 UNIT=SYSOA.SPACE=(TRK,(S,SI,RLSEl,OC3=(RECFM=VBS,II LRECL=324,8LKSIZE=328.8UFNO=11IIGO.FT24FOOl 00 UNIT=SYSOA,SPACE=(TRK,(5.SI,RLSEl .OCB=(RECFM=VBS,II LRECl~324.8LKSllE=32a,BUfNO=11IIGO.FT2SFOOl 00 UNIT=SYSOA,SPACE=(TRK,(5,51,RLSEJ ,OC9=(RECFM=VBS,II LRECL=324,BLKSIZE=328,8UFNO=11IIGO.FT26FOOl 00 UNIT=SYSDA,SP.\CE"( TRK,(S,SI ,RLSE) ,DC8=(RECFM=VBS,II LRECL=804,BLKSIZE=808,BUFNO=11IIGO.FT27FOOl 00 ONIT=SYSOA,SPACE=(TRK,IS,SI,RLSE1,OC3=(RECFM=ves,II LRECL=804.BLKSIZE=808,BUFNO=llIIGO.FT28FOOl 00 UNIT=SYSOA,SPACE=(TRK.(S,SI,RLSEI ,OC8=(RECFM=YBS,II LRECl=804,8LKSIZE=80a,BuFNO=11IIGO.PlOTTAPE DO OSNAME=PLOTTAPE,UNIT,.TAPE98.VOL=SER=420S61,OC8=OEN=2,II OISP=(NE~,KEEPI,LAeEL=(l,SLI
IIGO.SYSlN 00 *

-7"3-
APPENDIX B
ELEMENTS OF CONSTITUTIVE MATRIX
The elements of constitutive matrix [C] for isotropic and single-layer
orthotropic shells are given below.
Isotropic Single-layer.Orthotropic
c·33
.(:55
C77
Caa
"
A.h1.
2(1-11)A.h.~
A.h3/12.1. .'.
A.h3/121.
A(l-lJ)A.h/2.J.
A h,o'
P,e Aoh
P.::.t! A hlJa, 0
4 G,eh
lJ,a Aoh3~12.
~lJa, Aoh3/12.
Ai = E/{1-112); h =total shell thickness
A = shear factor (to suppress transverse shearing strains, i.e.IG.r~hhoffhy"pothesis, set ;\.=100)
A =:Elb,;,- 11 0}1.)o ." . 'a, cpa .
Etfl =Young's modulus in 4l-direction
lJtfla
, l1e, =Poisson!s ratins for ~ or '9 directions with respect toe or , directions
GipO' Gipn' Gan =the shear moduli for ~-&, ~-n, and e-n planes

-1'+-
The elements of constitutive matrix (el for multi~layer orthotropic
and framed shells are given below.
Multi-layer Orthotropic.. . . Framed
Cl2
. C,,33
C,45
CS5
C:66
0.77
·C aa
o
o
(A ) ,etc. =the value or A , etc for layer 'k'ok' . 0
=thickness of layer 'k'
=the distance from the centroid of layer k to middle" sUrfa:ce', assuming symmetrical layers (see Fig. 5)
A~, Ae
~41' Ked d41' eE, G
= the area of members of frame in ~,e directions
= St. Venant torsional constants in ~,a directions
=the spacing of meridional and circumferential members
= Young's and Shear moduli

-75-
APPENDIX C
INTERMEDIATE PRINTOUT OPTION CODES
Code No.
86
87
88
89
90
91
92
93 .
Ref. Subroutines
GLMX
FIN'AFMINAESOTEMOT
GLMX
CALQF
ARC
LASH
SSTMST
Description of Intermediate Printout
Upper diagonal part of structure stiffness and mass matrices in banded formas arrays GS (1 to N) and GM (1 to N).Where, N =0 6x (no. of nodes) for j = aand lax (No. of nodes) for j > O. Theelements of these matrices need to bemultiplied by 27T for j = 0, and by 7T forj > O.
Upper diagonal part of improved elementstiffness and mass matrices as arraysA and AM or BM. The elements of allthese matrices need to be multiplied by27T for j = 0, and by 7T for j > O. Moreover, the elements of A need to be multiplied by a fac~or 106 .
Structure loading vector as RF (1 to M)array. Where M =5 x (No. of nodes) forj > 0, and 3 x (No. of nodes) for j =0 O.The elements of all these vectors shouldbe multiplied by 2rr for j = 0, and by rrfor j > O.
Element nodal loading vector as QF (1 to6) and QFC (1 to 10) arrays correspondingto harmonic numbers j = 0, and j > 0,respectively.
Local of nodes and three intermediatepoints on the meridian of each elementwith respect to the global coordinatesystem.
Temperature loading data for an element.Printout is in the form of an arrayIX (1 to 30)*.
Section properties of multi-layer orthotropic material as AS (1 to 7)** array.
Coefficients of Direct Integration Scheme.
* TX(l) to TX(S) and TX(16) to TX(19)
TX(6), TX(12) , TX(14)
= Temperature data
= Elastic and thermal properties

TX(7) to TX(ll) and" TX(lS) = Geometric data
TX(20) to TX(30) = Thermal loading data. For furtherdetails see subroutine TEMP. "
** AS(l) = Overall thickness
AS(2) =" Equivalent area per unit length ofmiddle surface in terms of outerlayer (ep- direction)
AS(3) = - do (a-direction)
AS(4) = - do (4)a-direction, for shearstress calculation due to N</>a)
AS(5) = EquiValent moment of inertia perunit length of middle surface interms of' outer layer (ep-direction)
AS(6) = - do (a-direction)
AS(7) = - do (4)6-direction, for shearstress calculation due to Mepe)

-77-
APPENDIX D
-
1.. Single Step Higher Derivative Schemes.[4 J:
After the stiffness matrix [K] and mass matrix [M] has been formed,
it is necessary to evaulate the following constants.
1-
1(-- 1)2P1

A •9
~o·
1
1
-78-
1~1:a (- -1)2PI
~2'"
P2PI ~t
P2 )Al3
... (- - IPI
where
PI' P2 , P3 = the parameters of integration scheme
~t = the time step
:a the coefficients of Rayleigh damping matrix
Next, it is necessary to form the modified stiffness matr~ It is
fo1low~d by forward elimination•
..[K] ... [Kl + ~ [M]
Then, the modified load vector is formed as below... 1~3{F(t:+~t)} = {F(t+~t)} + -p- {F(t:)}
3..
+ [M] (A3{~(t)} + A4{~(t)} + A5{~(t)})

-79:-
-Finally, the displacements {~(t+A't)} are calculated by back substitution.
Thus,
and the true displacement vector at time't+At' will then be
the corresponding velocity and acceleration vectors are then calculated from
- ~{A(t+At)} 2 ~{A(t+At)} - ~{A(t)} - ~O{!(t)} - ~{A(t)}
In the case of Newmark's ~method, P3 '" 1. For Wilson's 6-method,
Pl 2 1/6 and P2 '" 1/2. For an unconditionally stable scheme, in the first
case. one should take Pl '" 1/4 and Pz '" 1/2. and in the later case P3 = 1.4.

-ou-
2. Multistep (3,-step) Schemes[4].:
Here the constants to be evaluated are
( l+ PlCi)at
P2(C~-c-l~ )
at
P (c·-c A...)3 '0 r-r.
At
A •6
where PI' P2' etc. are the parameters of integration scheme.
Here the· modified s~iffness matrix and load vector will be
-{F(t+at)} ,. {F(t+at)} + [M] (A3{a(t)} +

-81-
_.As in scheme l~ after solving the following for {~(t+6t)}
the displacement vector is calculated from
+ Ag{6(t-2At)}) / AZ
In the case of first time step~ i.e. at t"'At~ it is necessary to
modify some of the aforementioned constants as below.
c ...2
~* .. (~A2 - C2) I (A2
- Cl
)
...
A3* .. (AlAZ - CZ) I (A
Z- C
1)
...A
4* a (A3 - P
2C
3)
For this step~ Ar~ A3, A4, and AS are to be replaced ~Y Ar*, ~*,
A4*, and AS*' Moreover, it is necessary to evaluate the following

{A(-At)} a
In the case of Houbo1t's scheme
p "" 11/·6· p. - -3· o· P "" 1 5· P .. -i/-3·1 '2 ·'3 e'4 '

-83-
APPENDIX E
LISTING OF 'FORHAM' (Program for calculating Fourier Coefficients)
c **•••••••••••**.**.*** ***•••***.MAINOOOlC MAI~0002
C THIS IS THE MAIN :a~TROl. PROGRAM FOR CALCULArtNG FOURIER COEFS FORMAIN0003C A~ AAI8TRARY LOAD FUNCTION DISTRIBUTED AROUND THE CIRCUMFERENCe MAI~OOO~
C FOR TWO SITUATIONS 14AIN0005C . 11 WHEN THE ORDINATES ARE GIVEN AT EQUAL INTERVALS MAIN0006C AND THE NUMBER OF ORDINATES A~e EQUAL TO THE MAI~0007
C NUMBER OF FOURIER coefFICIENTS (Ifl*OI MAIN0008C ZJ WHEN EITHER THE NUMBER OF ORDINATES ARE DIFFEREHTMAIN0009C FROM THE DeSIRED NUM8ER OF FOURIER COEFFICIENTS MAINOOI0C OR THE INTERVAl.S BETweeN THe ORDINATes ARE NOT iliA ["10011 ..C EQUAl OR BOTH (IF\.>()) MAIN0012C MAIH0013C PROGRAMMEO a y; MAlNOOl4-C PRODYOT KUMAR BASU MAI~0015
C WASHINGTON UNtVERSITV MAl~0016
C AUGUST, 197& . MAINOOl1C MAIN0018C •••*•••••••••••••••••••••••••••••••••, •••••••••••••••••••*••••*•••MA{~OOl9
IMPLICIT REAL.8 (A-H,P-I) MAIN0020OIMENSION VALI50.,A~G(501,X(50J,Y(50t,H(~50),A(25l.B(25),P(50), MAIN0021
x HEO(ZOI,CCZOO,25l ,T(ZQOl.OtZ5,2001 HAI~0022
C HAIN0023C ttl = "fUMBEIt Of DATA 50S rQR WHICH FOURIER coeFFICIENTS ARe MAIN0024C ReQUIREO MU~0025
C ~OIM s NUMBER OF GIVEN ORDINATES (AT Eg~AL INTERVALS OR OTHERWISElMAIN002bC , P~OV10EO THE LAST QRDINATE FOR NS=O CORRESPONOS TO THErA-360 MAINAOZ6C DEGReES, AND THH FOR NS>O TO THEU=lSODEGREeS. MAIN8026C NO = 2 TIMES tHe ~AXIMUH n~oeR OF H4RMONICS TO BE MAINOO?1C rCTTeo p~us 1 (l.E. THE NUM8ER Of COSINE TeRMS MAIN0028C AND SINE TERMS TO ae CONSIDERED + 11 MAI~OOZq
C IF IFL sO: ~a < ~DI~ MAlN0030C IFL a 0, ~O INTERPOl.ATION USING CUBIC SPLINES MA[N0031C ) 0, INTERPOLATION NECESSARY, IF THE ORDINATES ARE NOT AT MAIN0032C EQUAL INTERVAL AND 'NOIM-I' is HOT 000 MAIN0033C NOO a 0, ~O PUNCHED OUTPUT OF TIME HISTORY OATA MAIN0034C 1,PUNt~ED OUTPUT OF TIME HISTORY DATA REOUIRED MAI~003S
C IF NOO s 0, PUT NHC • O. AND NHS a 0 MAIN0036C IF NOO • 1, ~HC * NUMBER OF HARMONICS(COS, TO BE PUNCHED 8EGINNING~AIN0037
C wITH THE ZEROETH; MAXIMUM VALUe. (NO-11/2 + 1 MAI~0038
C NHS • Nu~eER OF HARHONIC~(S[N' TO aE PU~CHEC 8EGtNNtNGMAtNQQ39C WlTHTIiE FIRST; 14AXI14lJ,'l • INO-l l/2 MAIN0040C lDF • 0, OATA IS INPUT TIME STEPWISE MAIN0041C IOF 2 1, OlTA IS INPUT POINlwISE MAIN0042C TIl" INITIAl. TIME INEEDED IF NDO=U MUN0043C r5 • TIME STEP (NEEOeO IF NOO=L) MAIN0044
TII=O.O MAIN0045T5=0.0 MAtN0046AMIN s 1.000 MAI~0047

-0'1--
WIUTE( 6,50150 FORMATCIH1//17H*****ERROR IN iNPUT OATA••••NUM6ER OF FOURIER
~ICIENTS SPECIFIED IS WRONG)
GO TO ZOO60 CONTINUE
NN =< NO/lNM a NO - N~1*2
IF(NM.EQ.11 GO TO 4
P'E ~ 4~ooo*aATANIAMtNI
READe 5,11 HEO ,NI ,NOO" NO, I FL ,tJDO, I~HC ,NHS, IOF1 FORMATI20A4/8151
NHS • NHS + 1IFINOD.EQ.OI GO TO 23REAOCS,21) TII,TS
21 FORMAT(ZF12.61TI a TIl00 ZZ Ial,NITIll :a TI
2Z TI :a TI + TS23 CONTINUe
W~ITeI6,51' NI,NOIM,NO,IFL,NDO,NHC,NHS,TII,TS51 FORMATI7IS,2F12.61
IF(lfl.GT.OI GO TO 60NK = NOlM - 1
iF(NO.LE.NK) GO TO 60
IN nlPUr DA TA****NUM8ER OF FOUR 1ER
cC
C
CW'l I TEl 6,401
40 FORMATlIH11/69H••••*ERRORXICJENTS IS NOT 0001
GO TO 2004 CONTINUE
WRITE(6,ZI HEU2 FORMATIIHL/20h4111
MO • NOiFlIFl.NE.O.ANO.NO.LT.ZSIMOll a 140 - 1NOL 1 .. NO - 1M a NOLl/2)(lll a O.OVlll·0.0PI = Z.O*PVE/NOPlea Z.O.PVE/MOaD 3 101 L, NUL L
3 X(I+ll :a XI I I + PI00 24 I a 1,MOLl
2ft. '11+1) a YIU + PIE
MO=25 •
MAIN0048MAI~0049
MAIN0050MAINOOSl"'~IN005ZMAIN0053"AINOOS4"AIN0055MAI~OOS6
MAIN0057MAINOOS8··MAIN0059MAI~0060
MUN0061MAIN0062MAI~0063
MAIN0064MAlN0065MAIN0066MAI~0067
CO!ffMAIN0068MAIN0069HAIN0070MAIN0071MAINOOT2MAINOOnMAIN0014HAIN0075MAINO()16HA tNOO 71
COEfFMAIN0018MAIN0079MAINOOSOMAIN0081HAtH0082MAIN0083MUNAOS3MAIN80S3MAlNC083HAIN0084MAI~0085
MAIN0086MAIN0087MUNOOSSMAINA08SMAI~0089
MAIN0090MAI~0091
MA.IN0092

REAOCS,SI IARGCII,I::l,NOIMI MAIN00935 FORMATISFIO.61 MAIN0094
C MAIN0095C MAI~OOq6
C MAI~OOq7
C MAIN0098IF( rOF.EQ.OI GO TO 4S MAlN009900 49 K - 1,NOIM MArNOIOOREADC5,431 (e(L,KI ,L::l ,NO MAINOIOI
43 FORMATlSF10.41 MAINOIOZ49 CONTI~UE MAINOI034500 100 NIP - 1,NI MUN0104-
IFC IOF.EQ.lI GO TO 46 "UNOI05READ(S,61 lVALll),I::l,NOIM) MAINOI06
6 FQRMATI8FIO.4) MAIN0107GO TO 48 "AINOIoa
46 DO 47 I::l.NDIM MAINOl0947 VALlI) a ClNIP,I) MAINOIlO48 w~ITEC6,71 ~IP MAINOlll
7 FORMATlI15X,20HI~PUT DATA SET NO.:: ,ISI15X,16HTHETA IN DEGREES,5X,MAINOl12X13HPReSSU~E HEADIII MAINOll3
00 8 l-l,NOIM MAINOl14ARGO:: ARGIII MAINOllSARGCI) ~ ARGD*PVE/180.0 MAINOl16
8 wRITEC6,91 UGD,VALlI) MAIN01179 FJRMATC10X,F10.6,6X,E12.S/I HAINOl18
IF(lFL.EQ.OI GO TO 18 MAINOl19WRITEC6,lOI NIP HAIN0120
10 FORMAT (lHl,5X,66H INTERPOLATED VALUES AS PER CU6lC SPLINE SCHEME MAIN0121X FOR DATA SeT NO.::,ISI15X,lbHTHETA IN OEGREES,5X,26HINTERPOLATEO PHAIN0122XRESSURE HEADIII MAINOL23
C HAIN0124CALL CUBS~LlVAL,ARG,NDIM,MO,y,H,IERI MAI~0125
C MAIN012618 IF({FL.EQ.OI NN :: NDIM - 1 MAIN0127
IFllfL.NE.OI NN :: lola MAlN012axo ~ 0.0 MAIN012900 11 I :: 1,NN "AIN0130IF(IFL.EQ.O) GO TO 25 MAIN0131P(II :: YlII MAlN0132XO :: (I-11*360.0/MO MAIN0133WRITE(6tl21 XO,Y([I MAIN0134GO TO 11 . MAIN0135
25 PCII a VALlI) MAIN013611 CONTINUE MAIN013712 FaRMAT(10X,F10.6,6X~FIO.6/1 MAINOI38
WRITE(6,131 NIP MAIN013913 FORMATCIH1,5X,49H VALUES OF FOURIER COEFFICIENTS FOR DATA SET NO.::MAIN0140
~,I5115~,16H HAR~ONIC NUM8ER,~X,25H COEFFICIeNTS FOR COSIJXI,5X,2SHMAIN0141

x COEFFIC1ENTS FOR SINIJXI/IJ141=14+1CALL FQURIEIPtNN,Ml,A,StIER.PVE)00 15 J-l,Ml1.1. = J - 1WRlTe(6tH) I.l.tA(J),8(JI
14FQRMATII0XtI5t20X,F10.6.20Xt FIO.6115 CONTINUE
IFINIP.EQ.NII GO TO 9900 20 K=L,NOIM
20 A~GIK) = ARGI~I.L80.0/PV=
YllI .. 0.0DQ 30 1=1,140
30 VII+11 = y(tl + Z.PVE/MQ99 CONTINue
IF(NDO.EQ.OI GO TO 9800 3L K:altNHC
31 OINIP,KI = A(~I
IFINS.GT.O) GO TO 98IF(NIP.EQ.1I GO TO 9800 32 K=2,NHSKK = NHC + K - 1
32 DINIP,KKI a S(KI98 CONTINUe
100 CONfI~Ue
IF(NOD.eC.OI GO TO 200NHS = NHS - 1IF(NS.GT.OI NHS=ONH .. tiHC + NHS00 150 K=I,NHWRITE( 7, ltOI K
110 FORMAT(lH tI31IFITII.LT.O.000001I GO TO 140WRITEI7t lZ01 T(ll,Oll,KI,TI2I,OI2,KI,fI31,0(3,KI
lZ0 FORMAT(20X,6FI0.51WRITE(7,1301 ITIJI,OIJ,KI,J=4,NII
130 FORMAT(4(FI0.5,FI0.51)GO TO 150
140 CONTI~UE
WRITE17,1301 ITIJ),OIJ,KI,J=l,NII150 CONT I~Ue
WR IfEl 6, 1601160 FORMATlIH1/40H ••••MEAN VALUES OF FOURIER COeFFICIENTS/II0X,
X34HFOURIER COEFF. NO. MEAN VAlUe/II00 180 Ka l,NItTIKI = 0.000 115 J a l,lIIlTIK) ,. TIKI + OIJ,KIIFIJ.LT.NII GO TO 175
MU!II0142MAlN0143MAIN0144MAIN0145MAlNOl"6MAiN01"7MAfN0148MAIN0149MAIN01SOMAlNOl51MAIN0152MAINA152MAIN0153MAlN0154MAINOl5!)MUN0156MAIN0157MAI~OI58
MUN0159MAIN0160MAIN0161MUN0162MAIN0163MAIN0164I4UN016SMUNOH6MUN0167I4AIN0168MUN0169
. MAIN0110MUNOl7lHAINOl72MAINOl73MAIN0174MAIN0175MAlN0176MAIN0177MAlNOl7aMAIN0179MUNOlaOMAINOlSl",UNOISlHAIN0183MAINOIS4MAINOl8SMUNOla6MAlNOla7MAINOlSSMUNOIB9

AFC a TC KIINlWRITEC6.1101 K.4FC
170 FORMATl18X.I4.LIX.FIZ~6)
. 175 CaNT {,Nue180 CON TINue200 STOP
ENDSUBROUTINE FOURIE(P.~O.Ml,A,8.1ER,PVel
cC THIS SUBROUTINE CALCULATES THE FOURIER COEFFICIENTSCC
IMPLICIT Re~L*8 CA-~.P-ZI
DIMENSION ~(II.S( 11 ,PC 11cC CHECK FOR P~RAMETER ERRORS
M a 141 - 1IER=O
ZO IFtM) 30.40.4030 IER::aZ
RETURN40 N .. (NO - 11/2
IFCM-NI 60.60.5050 IERai
RETURNcC COMPUTE AND PRESET CONSTANTSC
60 ANaNCJEF::aZ.0/C2.0*AN+l.01CONST..PVe*COSFSl .. DSINCCONSTICl a OCOSCCONSTlCa l.0S=O.OJ=lPZ"'P(ll
70 U2=0.0Ul.:0.0I=2*~Hl
CC FORM FOURIER COEFFICIENTS RECURSIVELYC
75 ·UOaPlIJ+Z.O*C*U1-UZUZ=UlU1=UO1= 1-1IFII-lI 80,80,75
80 AIJlaCOEF*(PZ+C*Ul-U21
MAIN0190MAlN0191MAIN019ZMAl~0193
MAIN0194MAIN0195MAIN0196FOURIOOlFOURIOOZFOUR 1003.FOURI004FOURI005FOUR 1006FOURI007FOURIOOSFOURf009FOURfOLDFOUR 1011FOURI012FOURI013FOURI014FOURl015FOURIOl6FOURIOl7FOUR IOL8FOUIU019FOURIOZOFOUR IOZ1FOURIC'2ZFOURI023FOURIOZ4FOURIOZ5FOURI026FOURI027FOUR 1028FOUIU029FOURI030FOURI031FOUR 103ZFOUR·I033FOURI034FOUR 1035FOURI036FOURI037FOURI03SFOUR 1039FOURI040FOURI041FOURI04Z

-88-
I
THIS $UBROUTINE CARRIES OUT CUBIC SPLINE INTERPOLATION
B(JI=COEF*S*UlIF(J-(H+1II 90,100,100
90 Q=Cl*C-Sl*S5=Cl*S+Sl*Ce-gJ .. J+lGO TO 70
100 4(11=4(11*0.5RETURNEND :SUBROUTINE CUBSPL(F,X,N,M,G,H,IERI
DO 5 I=l,NlJ2"'I2+[H( I I=X( [+l'-X( I IIi I JZI= (F ( 1+Il-F I II I/H ( I I
5 C.ONTINUE00 10 I=2,Nl
J2=[2+IJ3= I3+IJ4=I4+IJ5=I5+IJ6=[6+[J7=I7+IH(J31=H( I-ll+H(·I IH(J41=.S*HfI-11/H (J31H(J51=(H(J21-H(J2-111/HfJ31H(J61=H(JSI+H(J51H(J71=H(J61+~(J5)
laCON TPIUE
C·CCC
C
C
DIMENSIONDOUBLE PRECISIONDATA
I2"'NI3=N+N14" I3+NI5=I4+NI6=I5+NI7=I6+N18= 17+NI9=I8+NNT=i.6IER = 0~u .. N-l
F(ll,Xll"G(l',H(ljF,X,H,G,EPSLN,OMEGA,ETA,W,HTl,HT2,PROO,OELSQSEPSL~,OMEGA/l.0-l~tl.0717967697244908001
FOURI043FOURI044FOUR 1045FOURI046FQURI047FOURI048FOURI049FOUR 1050FOUR 1051FOURI052eUBSPOOl.CU8SPOOZeUBSP003CUBSP004CU8SP005CU85P006CU85P007CU8SP008CU8SP009CUBSPOI0cueSPOllCUBSPOIZCUBSP013CUBSP014CU8SP01SCU8SP016CUBSP017CU8SP018CUBSPO I'~
CU8SP020CUBSP021CU8SPOZ2CUBSPOZ3CU8SP024CU8SP025CU8SPOZ6CU8SPOZ7CUBSP028CU8SP029CUBSP030CUBSP031CU8SP032eU8SP033CUBSP034CU8SP035CUBSP036CUBSP037CU8SP038CU6SP039

.-0:;1-
HI f6.1I:0. CUBSPOItOJ6=[6+N CU8SP041H( J6l"0. CU8SPOlt2
C CU85P043KCOUNT:O CU8SP044
15 ETA=O. CU"BSP045KCOUNT"KCOUN T+ 1 CUBSP04600 25 [:o2,N1 CU8SP047
JIt=[4+[ CU8SP048J6= [6+1 CUBSPOlt9J7.. t7+[ CUBSP050W=(H(J1)-H(J4)*H(J6-1)-1.5-H(J411.H(J6+il-HIJ6»*OMEGA CU8SP051IFIDA8SIWl.LE.ETAl GO TO 20 CUBSP052En"OA8 SI loU CUBSP053
C CUBSP05420 HIJ61"HIJ6l+W CU8SP05525 CONTINUE CU8SP056
IFIKCOUNT.GT.NT) ~O TO 75 CUBSP057[F CETA.GE.EPSLN) GO TO 15 CU8SP05l:l
C CUBSP05900 30 1=1,N1 CUBSP060
J6.. 16+[ CUBSP061J8=[8+1 CU8SP062HtJ81"IHIJ6+11-HfJ61l/~ll) CU8SP063
30 CONTINUE CU8SP06400 65 J=1,M CU85P065
1=1 CU85P066J9"19+J CUBSP067[F IG.(Jl-XI 11 I 70,60,35 CU8SPQ/')8
35 [F IGfJI-XINII 45,50,10 CU8$P06940 [F fG(JI-XCllI 55,60,45 CU8SP0701t5 1"1+1 CU8SPOll
GO TO 40 CU8SP07Z50 l:olf CUaSP07355 1:01-1 CUBSP074
C CUBSP07560 J6-16+1 CU8$P076
JZ"IZ+I Cli8SP077J a.. [8+1 CU85P078HTl-Gf Jl-XII I' CU8SP.079HTZ=GIJl-XII+ll CUBSP080PROO-HTl*HT2 CU8SP081H(J9'''HIJ61+~T1·HIJ81 CUBSP082DELSQS=IHIJ61+H(J6+11+HIJ911/6. CUBSP083GIJ ):0 FIll +H n • HI JZ)+PRQO*OELSQS CUBSP084
65 CONTI~·we CUBSP085GO TO 9005 CUBSP086
70 IER:z1Z9 CUBSP087GO TO 9000 CUeSPOlt8

7S IER2 1309000 CONTINUE900~ RETURN
END
CUBSPQS9CUBSP090CU8SP091CUBSPQ92
cc ********************•••**********************.****••**••****.*.***CC INPUT FORMAT FOR FOHARMCC .***.**********••*************************************.***********CC 1) fl~ST CARD: TITL: CARD 120A41C ANY ALP~ANUMeRIC INFORMATION ABOUT OATAC oeSIREO TO SE PRINTED WITH THE RESULTCC 2) seCOND CARD: CONTROL CARO (SIS.C NI.NOIM.NO.IFL.NOO.NHC.NHS.tOF (fOR oeSCRIPTIONC OF THESE PARAMETERS SEe COMMENTS)CC 31 THIRD CARD : INITl~L TIME CARD (lf12.bl - OPTIONALC TII.TS (NEeOED ONLY IF NDD=l'CC ~) LOCATION CARDS: t8F10.b}C LOCATION OF NorM POINTS IN DEGREESCC 5) ORDINATE CARDS:C CASE 1 - DATA IS INPUT TIME STEPwIse 18FIO.41C FOR EACH TIME STEP. THE QRDINATES AROUNQ THEC CIRCUMFERENCE ARE INPUT CONSECUTIVELYC CASE l - DATA IS INPUT POINTwISE 18F10.41C FOR eA:H POINT THE ORDINATE CORRESPONDINGC TO eACH TIME STEP IS INPUT SUCCESSIVELY.C.C ********.*.**.*••*.*******•••****.****.**************************.c

APPENDIX F
LISTING OF 'THPLOT'
--..--..._.....flot"l.OT...............-...
OIl .. OSAlt* ....."'-SMa". ( 1't&ACH, L91Q )
'to; : ~• J
mE1.m~~~snns ,~'SULtA#IlTfO"''' .'fUM". ~ ;tall'~tS ~'" ~Of f~U•• LQOO.
N1Uf11P: 011 <:'~TS ,I(JK ntl SAlt. ry~ Of lJ..atl"Ht! IIftl"laR a" rK. H."HaMle It ST. , l ·'f0• ., •• l
fMC H.... I'lO.." ,'tUftIIit rO.L."LZ.~~••• J
TOrA... /tUfte.It ~ H4&MlN(~.s (1'IUJItM • !...J,ST lieC]
~aa",r 011 fMC saccHO ,-,Ita IS I U, i
~. Hac. 14Uf'1;'. A.' .....,eM ".aT IS 'il'R ...
.'lCQIl COM_."r ......R TO •• "OTtO
'OJI..A, "OIl 3 itO. ~ '" rM. C..utOS IS , L015 I

APPENDIX G'
DEMONSTRATION PROBLEMS

Exa
mpl
e1
-Fl
tee
Vib
M.i
lon
Anai
.Y-6
-won
4C
yUnd
lt1c.
ai.
Sh
ell
Fre
ev
ibra
tio
nan
aly
sis
of
the
shell
show
nin
Fig
.17
isco
nsi
dere
d.
The
shell
isd
iscre
tized
wit
hse
ven
gen
era
lel
emen
ts.
The
elem
ents
are
of
thir
do
rder.
The
mas
sd
en
sity
for
the
mate
rial
of
the
sh
ell
ista
ken
as
0.0
00
73
6lb
.sec
2/i
n4
•T
heu
pp
erli
mit
for
the
ran
ge
of
eig
en
valu
es
(Pu)
is
tak
enas
0.0
00
00
1;
wh
erea
sth
elo
wer
lim
it(P
L)
ista
ken
as
zero
.T
hed
esi
red
num
ber
of
eig
en
valu
es
and
eig
en
vecto
rsp
er
har
mo
nic
issp
ecif
ied
as3
,th
enu
mbe
ro
fh
arm
on
ics
co
nsi
dere
db
ein
gtw
o.
The
SHO
RE
-III
ech
oo
fth
ein
pu
td
ata
isg
iven
bel
ow
.T
here
su
lts
are
pre
sen
ted
inth
eT
heo
reti
cal
Man
ual
.
ECH
OO
FIN
PUT
DATA
DEC
K**
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
**o
11
22
33
44
55
66
77
8..
.•5..
..0..
..5•..
.0.~..
5.•
..0.•
..5•..
.0••..
5••
••0•.•
•5.•
••
0•.•
.5
••••
0.•
••
5.•
..0
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
I \0 W I
-4.0
-4.0
1.0
1.0
SHEL
L(U
nit
s:l
b.,
in.)
Plto
blem
Tit
leC
altd
Plto
lem
Coy
ww
lC
altd
Ele
men
tCa
ltd-6
VIB
RA
TIO
NA
NA
LYSI
SO
FA
FIX
ED
BA
SEC
YLI
ND
RIC
AL
21
:3
1 1
FREE 7
1 71
0.0
20
.12
86
30
.38
86
40
.92
86
52
.02
86
88
.92
86
11
11
11
0.0
400E
OO
O.0
40
0E
00
3.0
00
0E
07
0.3
00
0E
OO
70
.04
00
EO
OO
.04
00
E0
03
.00
00
E0
70
.30
00
EO
O3
33
33
33
3
0.0
00
00
13
.0H
ARM
ON
ICNU
MBE
R=
0o
HA
RMO
NIC
NUM
BER
=1
1JO
BEN
D
3
0.0
73
6E
-20
.07
36
E-2
3
Nod
alP
oin
tCa
ltd-6
Ma;
telti
ai.
Inn
oJun
a:U
oY/.
Caltd
-6
V-w
plac
.em
ent
Fun
e-tL
onC
altd
OLd
pc.d
Co
nt/
wl
Cal
td(b
lank
)M
aMM
atJU
xC
altd
(bla
nk)
Eig
enva
lue
Ana
ly-6
-wC
altd
Load
Tu
te&
Load
ing
Con
Vt(·.
f.Ca
ltd-6
n0lt
2H
altm
oMe6

~ m
~L
....
'?};
d••
...I
t
,-..."
I7 8
I IJ oj: I
ofof
...Z
MO
DU
LUS~
ELA
STI
CIT
Y.:
30
X/0
6
PO
ISs0
t4R
ATI
O•
0-3
~A
IMS
PEN
STrY
II0-
7!6)
(1O
Ib.s
.J1f
I
Fig
ure
19,•
Cir
cu
lar
Cy
lin
dri
cal
Sh
ell

Exa
mpl
e2
-Fl
lee
Vib
lla:U
onAn
ai../
j.6-w
ona
Hem
iAph
eJr.i
c.ai
..S
hell
The
hem
isp
her
ical
sh
ell
show
nin
Fig
.18
isd
iscre
tized
wit
hon
esi
xth
-ord
er
cap
elem
ent
and
fou
rsi
xth
-ord
er
gen
era
lel
emen
ts.
The
ech
oo
fth
ein
pu
td
ata
dec
kfo
rth
isp
rob
lem
isg
iven
be
low
.T
here
su
lts
are
dis
cuss
edin
the
Th
eo
reti
cal
Man
ual
.
ECH
OO
FIN
PUT
DA
TAD
ECK
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
o1
12
23
34
45
56
67
7·
B••
••5••
.•0••
•.5
••••
0.•
.•5
••••
0••
••5
••••
0•.•
.5••
.•0
••••
5••
••0
••••
5••
•.0•.
••5
••••
0**
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
**
I I.C \J I
HEM
ISPH
ERIC
AL
SHEL
L-
(6th
OR
DER
ELEMm~TS)
FREE
51 2 5
VIB
RA
TIO
NA
NA
LYSI
SO
F,1
16
21
.01
1.0
11
.0
1.0
1.0
1.0
-50
.0-5
0.0
-50
.01
0.0
62
5.0
11
0.5
000E
OO
O.5
00
0£
00
3.0
00
0£
07
0.3
00
0£
00
50
.50
00
EO
OO
.50
00
£0
03
.00
00
£0
70
.30
00
EO
O6
66
66
66
6t
6
0.0
73
6E
-20
.07
36
E-2
6
O.O
QO
OO
Ol
HA
RMO
NIC
NU
MBE
Ro
JOB
END
o4
.0
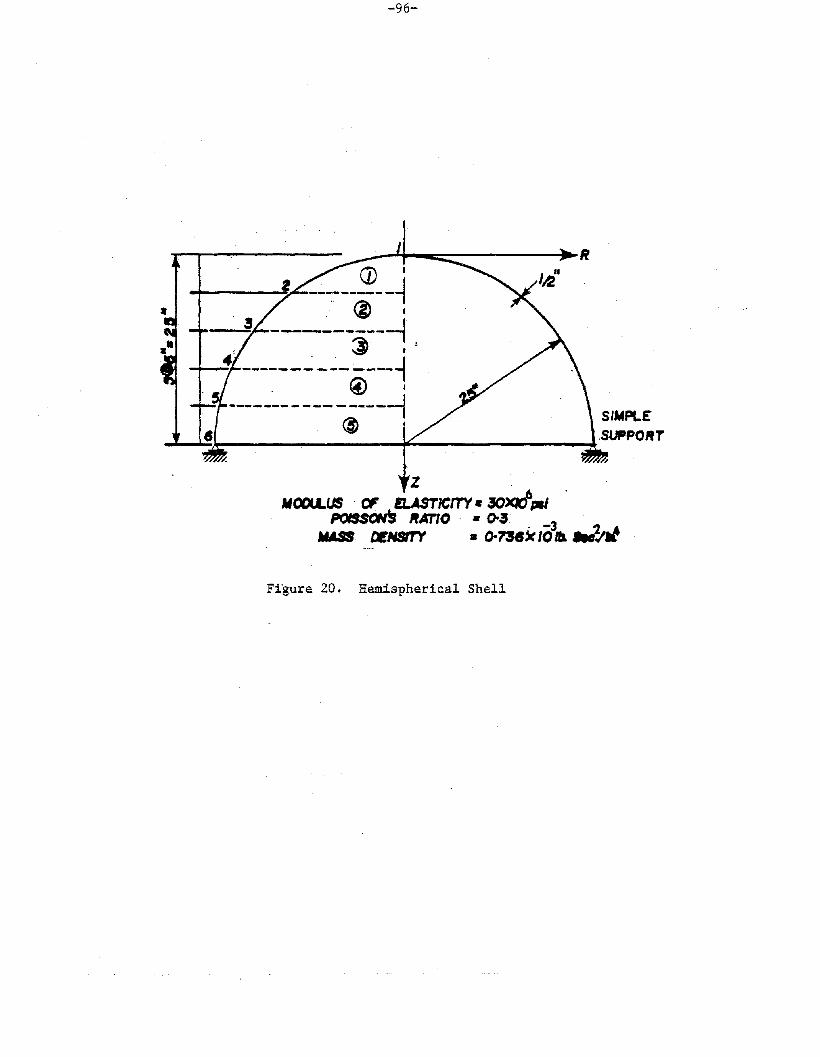
-96-
(j) I
~-i"--j~-~~-----------1
, ~ I
-+--.~I------_-: ------1----------<i~-~
ZMOOCLUS " ELASTICITY. 30xdpal .
POISSONS RATIO . • o-a 3MASS ~N8ITY • o-738j(10 Ib.lIetl:ItI
Figure 20. Hemispherical Shell
Example 3 - FJtee VJ.bJtCLt1.ol1. Ana..ty!.>J.-6 on Empty Wa.:teJt Ta.n.k. wilh SoU
In:teJta.cUon. E66ec.:t.
The tank shown in Fig. 21 was analyzed using seven sixth-order
general elements, the seventh element is the ring footing of the tank.
The soil is modeled with sixteen isoparametric quadratic solid elements.
The soil model is analyzed at a driving frequency of 358.8 rad/sec, the
fundamental frequency of the tank on rigid foundation.
The input data echo of the problem is given in the following page.
The results are presented in the Theoretical Manual.

Week Concrete
Fill • '/l'
Med. Sand
Course Sand
•I
'0 . "0' . 'q . 0 .tt "0:'; ··•• ··0 "p i1 "tJD'IT o'D' :~;"Q: . ,?'o "0'0'~ b --:~ .. ..' tl· D v . .., "/1 0 D· '.,I "0' :'0' 0';":· .,,·.,;.v '·0·: ·'(10. ··.·.<o .•·.·o:.v,". J'.. ...• •.. . ." . .. .....
I
35'" ~ @ ® 16 & Send &G'Q~II
I
104
27'~I
Figure 21. Cylindrical Water Tank on Flexi~le Foundation
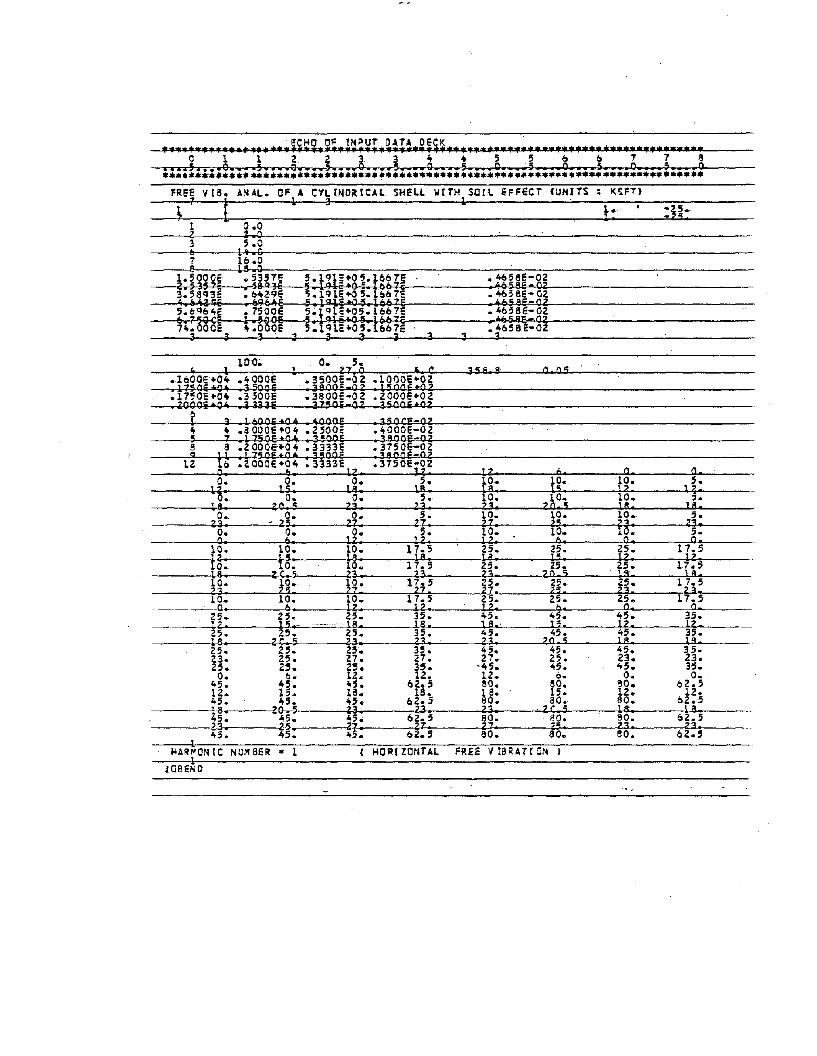
iiHO OF tNPUT DATA DE~K .••••••••••••••••••• • •••••••••••••••••••••••••••••••••••••••••••••••••••••••*.
FREE V IS. MUL. OF ACYL HoIDitlCAL SHELL. WITH SOIL EFFi:CT {UNIiS : I(~FTl
- \ 7 t L 3 1. I.1 0.0Z % 0
7 Ib.O@ 18 .0
-25.-25.
100.. o. 5.~ 1 1 Z7 0
_. C35 e. 8 0.05
.1600E+04 .ftOOOe .3500E-02 .1000E+02--j71H'i +Qft .350QS 3800=-0 Z .15005+02
• 7~OE.04 .3 SOOE .3800E-02 .zoooe+oz.aOOe!! +04 3333i 37501:-02 3500E+02
~ 3 11:100E+04 .4.Q.OOE • HOCe-02
" ft .3 oooe +0" • ZSOOE .4000e-oz5 7 1750e*04 .3 c OOS .3 8 OOi-02
" 8 .2 oooe+o" .33335 • 3750e-020 11 1750S+0" • 3500e .3900e-02
12 lEI .2 OOOE +04 .33335 .3750e-02o. 1:1. 12. 12. 12. 6. a o.o. o. O. 5. 10. 10. 10. 5.
12. 15. 1 a-. lA 18. l5. 12 q.O. o. o. 5. 10. 10. 10. ,.
18 20.5 23. 23. 23. 20 5 18. 18.o. o. o. 5. 10. 10. 10. 5.
23. - 25. 27. 27 27 25. 23. 23o. O. O. S. 10. 10. 10. 5.O. b. 12. 12 12. b 0 O.
10. 10. 10. 17.:5 25. 25. 25. 17.5p. t5• IS' lB. 18. 15. l2. 12o. O. 1 • 17.5 25. 25. lS. 17.51.8. 2(,.5 23. 23. 23. 20 S JS 18.10. ;g. ;~. 17.5 25. 25. 25. 17.523 17 27. 25. 23. 23.10. 10. 10.- 17.5 25. 25. 25. 17.5
------___0.. b. 12. 12 12. 6. o. o.25. 25. 25. 35. itS. 'I'. 45. 35.12 15.- 18 18. 1 flo H. 12 12.25. 25. 25. 35. 45. 45. 45. 3S.18. 2C.5 23. 23 23. 20 5 18 1a.25. 25. 25. 35. 45. 45. 45. 35.23. 25. 27. 27. 27. 25. Z3. 23.25. 25. 25. 3'. -~5. ..5. 45. 35.o. b. 12. 12. 12. o. o. o.
45. 45. 45. oZ.5 80. 80. 80. 02.512. lS. 18. 18. ~ 8. 15. 12. 12.4S. 1t5. 45. 02.5 o. 80. 80. oZ.518. 2G-.-5 23. 1.3. 23 ZC ; 18 1 B.45. itS. 45. oz.5 ao. i!0. 80. OZ.523 25. ZJ' 27. 21 • ,s Z3 23.4'. 45. " . oZ.5 80. ao. 80. oZ.,
1HARr-ONIC NUMBER .. 1 HOR[ ZONTil FREE V IBRATI ON I
1JOeENO
-100-
Example. 4 - S:ta.:tLc. An.a1..Y.6-<A 06 Column Su.ppoJr.:te.d HypeJtbo.R..oJ..da.e. ToweJt UndeJt
Wind Loa.d
The tower shown in Fig. 22 was analyzed using ten sixth-order general
elements and open-type element (Type 7) at the base. It was analyzed for
a mean static wind pressure expressed in terms of the following six harmon-
ies.
Harmonic Number
o
1
2
3
4
5
Fourier Coefficient
-0.064317
-2.072903
-3.846021
-3.404910
-3.962074
0.3289617
The input data echo of the problem, is given in the following page. The
results are presented in the Theoretical Manual.

'. ~C~C OF I~P~T C4T~ C~CK.................................................................** ''0 1. 1 2 Z ; 3 " .. 5 , (: 6 7 7 I
•••• 5•••• 0 •••• ~ ••• ~O •••.• S•••'.J •••• 5 •••.• 0 •••• 5 •••• 0 • •••.5 ••••0 •••• 5 •••• 0 •••• 5 •••• f••••* *.* * ~ •••••••••••••••••*.
. ..__ .•.._--
. .. _-'- - _ - .. -_.-.: __ _-_.,_..•.__ _•.. _-_.:--._-----
1.0.1.• 0.
-_._,.- ........~..... :._....
1
STATlCL1,
~a11
.. WIND. LOACING• '.- Q 1.-_. L lit
WINO l.CACING1. t1 1.~
.WHIO LCACING - ",uJOC1'lIC NtJ~9C:R ,. 2Z 1.1. 14
WtNO LCACINC3. 1.1 14
wtN~ LCACING - HAProtNIC NU~9!R s 4~ 1.
··''-IN6-·LCitiING - JolAQI'CNtC ~u",a=R s 5..__ 5. . L ...
1. 14.J.C.B!Na..

-102-
'0.9'SIZE OF
I.£l.£M£JITS
23-Z CD 36"2 ._._------ 7"
!!HI' (!) .5 -_._.- _._- --
ri)I
® Q3M5
• -------- If
490128' @ '02·(1.....
5 <>--------~
80' ®t\I.,
• . ----_._--I
@50
7 ---- -----50' 0
8 . -_._- ------- ~q»
5/'94' ® §
149-8'
2'083' OIA. COLUMNS
(44 PAfiS)
Z
MODULUS CF ELASTICITY:
5-2XIO' (SHEUJ; 6-4XJo'r.COLSJpsl
POISSON'S RATIO =O·/~
DENSITY=IISO t.lcft -
Figure .22. Discretiz~tion of Hyperboloidal Creek Tower

Exa
mpl
e,5
-V
ynam
ic.
Ana
lyf..
i.606
aF
Ji.e
e-F
ixed
CyU
nciJ
l.ic.
alSh
e.tt
Unde
Jz.
BIM
tLo
ad
As
show
nin
Fig
.23
the.s
hell
isd
iscre
tized
wit
hsix
gen
era
lel
emen
tso
f6
tho
rder.
It
is
anal
yze
dfo
ro
nly
the
zero
eth
har
mo
nic
of
the
bla
st
load
show
nin
Fig
.2
4.
The
Wil
son
-6sc
hem
eis
use
dfo
rd
irect
inte
gra
tio
nan
dth
eti
me
step
ista
ken
as
0.0
00
00
5se
c.
Fo
rC
alco
mp
plo
ttin
go
f
ou
tpu
tth
efi
rst
200
step
sare
specif
ied
for
the
no
rmal
dis
pla
cem
en
tat
the
top
and
meri
dio
nal
mo
men
tat
the
bo
tto
m.
The
inp
ut
data
ech
oo
fth
ep
rob
lem
isg
iven
bel
ow
.T
here
su
lts
are
pre
sen
ted
and
dis
cu
ssed
inth
eT
heo
reti
cal
Man
ual
.
ECH
OO
FIN
PUT
DA
TAD
ECK
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
o1
12
23
3'
44
55
66
77
a..
..5..
..0..
..5..
.•0•..
•5..
..0..
..5..
••
0.•
••5••
.•0.•
•.
5..
.•0••
•.5..
..0..
•.
5..
••
0**
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
****
**A
NA
LY
SIS'
OF
FRE
E-F
IXE
DC
YLI
ND
RIC
1\L
SHEL
Li(
6th
ORD
EREL
El-lE
NTS
)4
6
-H
ARM
ON
ICN
UM
BE
R;
a(U
NIT
;PS
I)*
N.I.
SCH
EM
E:W
ILSO
N1S
I f C v I
,Out
put
CoY
Ww
lC
Md
T-im
eH
i.6to
Ji.y
Out
put
Con
:tAol
CaJi.
d
Veg
Ji.e
u06
FJi.e
edom
CaJi.
M
MM
f..M
atJU
xCa
Ji.d
Vyn
amic
.Lo
adTy
peCa
Ji.d
Load
TUle
CaJi.
dLo
adin
gC
ontn
olCa
Ji.d
Vi.6
tJU
bute
dLo
adin
gC
aJtM
ViJ
l.ec.
t1n
tegJ
i.aU
onSc
.he.
me
CaJi.
d2
Va.
taCa
Ji.d
60Ji.
Vyn
amic
.An
alyl
.>,u
,In
itia
lC
ondi
tion
CaJi.
dT-
ime
Ste
pC
ontn
olCa
JtdT
Ule
CaJi.
dn0
Ji.In
pu
tT-
ime
Fun
ctio
nRec.oJi.dPoi~
CaJtd
12
00
1.0
-9.2
1.0
-9.2
1
-8.6
27
75
6-7
.14
56
37
-7.1
45
63
7-7
.77
21
57
0.9
58
18
45
10.0
02
4E
-l0
.00
24
E-l
66
1 13
111
1.0
1
FOR
HA
RMO
NIC
NU
MBE
R;
00
.00
00
05
1.0
0.0
01
LOA
DIN
G2 6 7
1 320 2
BLA
ST a 1 6 2
TIM
EH
ISTO
RY
61
11
61
10
.07
22
.51
1,1
11
10.1
000E
OO
O.I
OO
OE
OO
l.05
00E
070.
3000
EO
O60
.100
0EO
OO
.100
0EO
Ol.
0500
E07
0.30
00E
OO
66
66
66
66
O.0
00
00
53
BLA
STLO
AD
ING
0.0
0.0
JOB
END

-104-
9-e"
22'S'
oi"
~- -----. ~ I
3 ----------1~ I
----------~Q) ,
5 ----- ----~@ I
------ -- --I~ -I.
I ~_+-----__---r-"" "2
+5'
z
MOCllJJS ex: ELASTICITY:: lOex I06ptl
PO/sse"s RATIO :: 0-3MASS t:eISlTY :: 2-4Xit lb. S«;'2;ln4
Figure 23. Fixed Base Cylindrical Shell
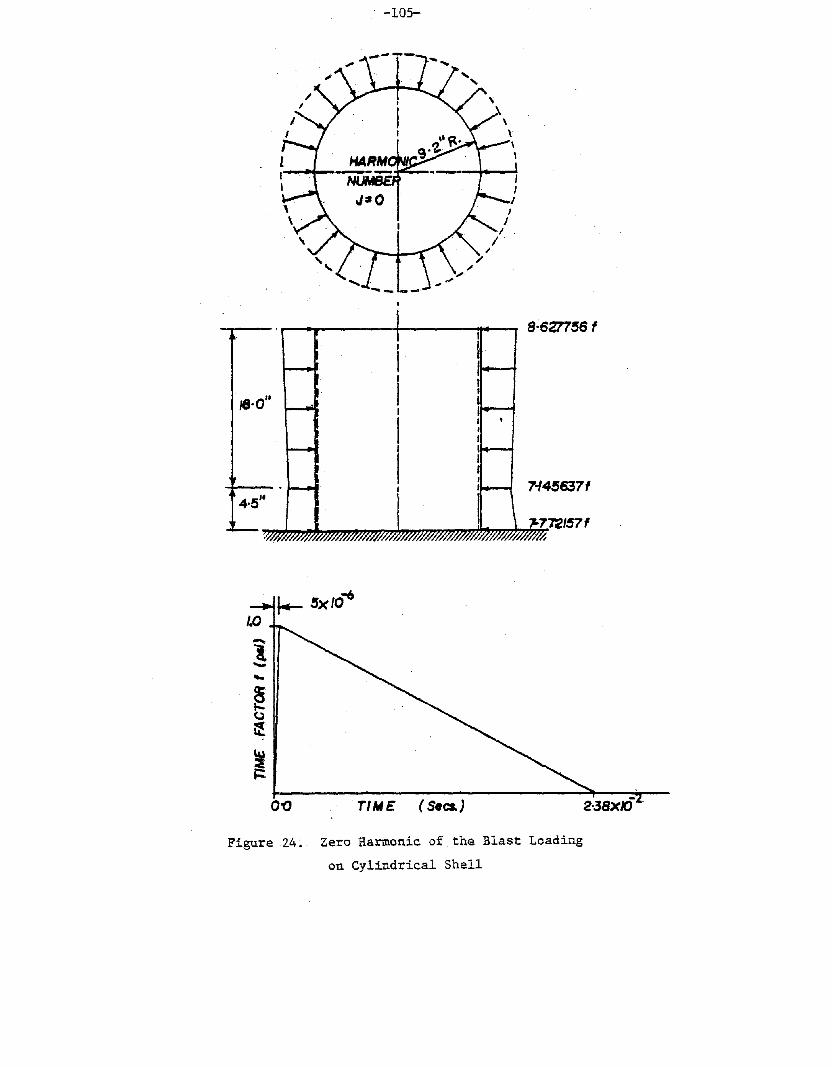
18·0"
-105-
II
JI
II
/.-'"~,...
""4~637f
-1.-....~(,)~.
~0'0 TIME (Secs.)
Figure24~ Zero Harmonic of the Blast Loading
on Cylindrical Shell

-106-
Ex,ampl.e. 6 - HypeJtbol.o.i.da.e. Shell. UndeJt Dynamic. Woo Load
The tower of Fig. 22 is analyzed for the wind loading, digitized at
0.5 sec. internal, shown in Fig. 25. This analysis was preceded by a free
vibration analysis to determine..the damping coefficients (~ = 0.276, B =
0.0058) and to select the time step (~t = 0.025 sec.). The pressure was
assumed constant over the height of the tower and eight harmonics were used.
The input data echo for the problem is given in the follOWing page. It may
be noted that the control card for dynamic analysis for direct integration,
data card for dynamic analysis, and the record points cards are provided
for the first harmonic only. Accordingly the columns 30-35 and 36-40 of
the problem control card were left blank. The results are presented and
discussed in the Theoretical Manual.

-...L.V/-

SM
.l.A
TE
DR
ISE
BA
SE
DO
N-
MTA
.FO
RS
TAT'
ION
NO
.13
64
52
-'6
0tJ
8tJ
6
(AFT
ERSP
LiNE
FIT
TN
i)
52
.>
"5
0
TIM
E1.
0
~0
8~ I
f/
06
/::J
HARM~
NO
FQ.fl
IER
CO
EFF.
·I
.q:
/0
-0.0
66
22
~~
,-2
.19
86
.0·
"/ I
•-4
.07
93
'I
!~
-3.
611t
Jl..
~l
c..
-0
.42
02
4c
II
/e
0.3
46
92
Q.2
IS0
.14
74
6
~I
..7
O.l
67
H
ElA
PS
ED
TIld
E(S
ect.
J
Fig
ure
25.
Tim
eH
isto
ryo
fW
ind
Loa
ding
for
Hy
per
bo
loid
alT
ower
Example 7 - Reoponoe Spewwm AnalqJ.>AA on HqpeJtbolo-<.da1. Shell. Wilh
Soil rn.:teJta.cUon..
The tower shown in Fig. 26 is analyzed under the ground motion
given by the response spectrum of Fig. 2]. The damping ratios for both
the shell and the soil 'is 5% of <he critical damping ratio. The analysis
of the soil is carried out under driving frequency of 20 rad/sec. The
soil medium is an elastic half space with shear modulus of 1600 k/sq.
ft. and Poisson's. ratio of 0.4. The input data echo for the problem is
given in page (112). The results are presented and discussed in the
Theoretical Manual.

-lJ.U-
:p (13.62)( 0.001 Fl
• (60.12)
T {A20.00}
y (580·37)
C0L148"'cj>80 DrAG.
----__ r
9 I ! -120j-I I I I__________J. . __....-~------_
I I I I
I : SOIL MEDIUff\
,
I, I.I I I t------------I--f--rT---------I 1 I
Z
=-~ CD
I,--I G~.----4I
UoIZ
-0u
Figure 26. Cooling Tower on a HypotheticalFoundation

-.1..1..1.-
10.01.00.100.01 "--......--1--l....l....l.::..l....l.J"l,__~..J-..I..~looU...l.l.._-..l._~..l-l..A.I..l.Io'
0.01
>-
~~
~~~ O.la\---+----~-l__-~---~-I__~~---~__tI
~~
UNDAMPED NATURAL PERIOD (SEC.)
HORIZONTAL [0.20 9 .5% Damping]
Figure 27. Horizontal Re~ponse Spectrum

. /'
"'.
':.'.
to
.'
.--
\~:
".i
1'(
\
EiH
OO
FIN
PU
TD
ATA
DEC
Ki
,~
*************.*******.~***.*********••
*~**¥*******.***~*****.*****~*************
o1
"'-
'C
22
,3'
,34
.4
5--
5--
;--'
6~--7-'
-78
••••
:>••
•'.
0.~
~.5
••••
0••••
5••
;,.
0·•
•••
5••••
0••••
5••••
0••••
5••••
0•••
~~
....
..0
••••
5••••
0**
***I
f.***
***.
''***
****
****
****
****
*'***
****
****
****
****
'Ii*-*
*",**
***.
***.
.....*
****
****
*.
,....
','
.".
..
'.'..
......
,"
.:..
':',
''.
..
'.'
."
..'
,.....
.'.
'.'
.
TE
ST
.PR
OB
LE
M'
(,R
ES
PC
JN
SE
'SP
EC
TR
UM
AN
AL
YS
IS)
.~.
BA
SEw
ITH
E.a
.S.
'9l'
'3
3'
·1:
1,\
10
1.
i,'
..
1;2
3.6
H3
77
-27
58
1.5
16
51
53
6ff
40
.5'3
7-,
-,-~,
.'4
'1
a-1
.);.'
9.4
()l
53
-L302~5923225462.8a292
,7'
10
."j'
.29
99
99
78
04
-:-1
'.8~2TT168-2
ti8
01
70
.".2
99
99
97
80
4-1
.'tH
.21
11
68
2I)'.
.1
01
-1
60
.37
2-.
29
'19
99
78
04
-.1
!OaT
.'2
,n6
l:f2
.4o.
----
--.-
-.-~
--
T'"
ai3
59
.8
80
,.
,.
""
,9
'4
06
.38
0'
---------;~
----
..----~
..'
,~
10
:'420~000
','.
11~333Er.000E
'o.1
91
E-t-
05
.16
67
Ed
,.4
1b
bE
'.If
,65
8E
02
---~
2'
.aO
OE
.6b
6lE
5~191E:
...·(
)5.1
66
71
::.4
16
6E
.46
58
E-0
2/
•~667E',
.66
67
£5
.19
1E
"'0
5.1
66
7£
'.4
16
6E
.46
58
E-0
2t
5.
66
67
t:.I;
.6'3
1Q
E5~19tl;t-Q5.1667E\
.41
66
E.4
65
8E
-02
\'6~8JTo~~S80E
5;1
9fE
+(f
5.1
66
7'E
,4
16
6E
·,.4
b5
8E
-0
2I
','
7.9
58
0E
3.5
00
E5
.19
1E
+0
5.1
66
7E
41
66
E~4658E-02'
J'
'81
2.S
7E
25
.1,4
E5~604E+0512.57E
e.S
7E
.46
58
E-0
24
.00
0e,
4~OOOE'
~)667·
94
.90
0E
20
.00
E5
..1
91
E+
95
.l6
67
E,...
41
6b
E.4
65
8E
..,.
02
\..
/
1uv
...,
\3
,I
u·.
,J.
,.",
'"J
iI
r~'
20
.7
'----
--7
5.-~-~":"'.'Z
!lp:r.-
=,.-:-.---llor;.=-iUrr!'i5'---~-----:----:-~-:--"""'--'----------~-----'
.lb
OQ
Et-
04
.-.4
00
0E
tOO
.3
50
0E
-0
2·;
"'
I'
,I
"
HA
kM
ON
IC
NU
MB
ER
=1
Rep
rod
uce
dfr
om1
,.'
1'
best
avai
lab
leco
py
.
1".0
5,2
.05
3.~05
3'\
31"
.:s3
33
.33
.3
3'
,"3
31
I'9
'.04
9.0
7'
9.09~~5
1.3
33
30
.66
67
0.9
5,8
,4
.09
0.0
i.•
.•..
"'.•
'I'
:oJ-I
IHO
RIZ
ON
IAL
RE
SP
ON
SE
~PECIRUM)
S'M
MP
·O.0
5U
AM
PIN
GIS
SE
Jl'
6,'
,'1
".
""'.
,,
.05
\".,/
J,.
"i.
f'I
,."
,'
,IO
O·.
oaO
Oi·
,.0
10
33
.33
33
'.0
32
;/7
.81
25
.35
0'
2.5
00
Q1
.10
0•
22
73
1.
10
0•I.
46
5J
OB
EN
D"'.
,'
,\
I
,('
,"'
'.

Example. 8 - Tune. H-<.otOJl.y AVIP.1..y~-<.o on HYPeJl.boloJ..da1. Shell
a.. WUh Soil Enne.e.:tb. WUhotLt Soil Enne.a
The tower of Fig. 26 is analyzed under El-Centro Earthquake
(5-18-1940) EW Compo The soil medium is considered as elastic half
space as in Example 7 and then the analysis repeated with fixed lower
boundary at node #10. The time of the analysis is taken as five seconds
and the time step for Newmark S method integration is taken 0.02 second
in case a (soil-structure interaction) and 0.005 second in case b (fixed
base). Th~ damping coefficients (a=O.7l5779 and S=0.003356) are obtained
based on 5% damping ratio for the first two modes of vibration (the
modes of vibrations are obtained in Example 7). The input data echo
for the problem is given ,in the next two pages. Fig. 28 shows the plot
of M~ at node #7 (6=0°) for the soil-structure interaction case (case
a). The rest of the results are presented in the Theoretical Manual.

eCtl<... 01' Ilql''JT· ~Aj ..... DECK**.*******•••*~********~**••*.4*.***••*.*.*****••~~**••****~***.******.**.*****.o It!: t' :l 21 4 4 J j ,6 () "f ., a
****'4********.********************.****.*.***.*.4***.**••••••*.**••*.*••~ ••****Tl,~\! R[STOA:, ANAL. lCOOL1NG Telae'" atTh :::lOlL: 1IiTePtAt:T10N, Ct: ClhTFlO eN
, ,,1 40 3 l'1 1 04 1 0
1 ad 8017 0:; 1 v
=x •.-1. 9.400153' -130a,.5923225400Z .<laZ92
.299999,604 =1. 67.2111582
.299Q997804 -1. 87.2111b82
.299999,a04 -1.81.2111602-160.-372
4 o.8 359.080
21.000E .oo67c3.060iE .CObIE ,
4_000e .100'
.40seeoz
.4"58E-02
.40:;61: 024.0001:
.4058E''02
.40~ae::a02
'.405SE-023
5
,4-1eoE.4100E
.410-62
.41bOe
.41boe
.41o"E12:.'HI:
"
S.191E.05.16o.7E
5ol91e;.o5.1007EJ ad04E • ,jj t!:." , E
5.191E.05.1607E).191E+O'.160'E5 • 19 1 e; +<>5 • 1067 E;;.1 ~leFO;;.16b"E
'5.I91e+O!J.l061!
3Z31432
tj 406.35010 4020.000
lE.J3SE i.OOO~
7.YSdOE 3.S00Eal •• J"fE !J.14e"4.000E 20.00E
J , 21 :3
.05
250
5 sec.0.22310 0.08 0.09514O.ZiZ'l 0.10 O.173ea0.4;;963 0.240 0.40662o .45t1:35 0,_5£ a_160?60.79724 0.400 0.436.J5O.Jlltli e ...a e.2"ftlB"f0.271:l1:l7 0.56 0.43307e.t17S ..6 e064 El .. Ell;Z02Cl.340t19 0.72 0.42979a. ~ 95 rot a.SEl t.eaZb5
-1.72244 O.dS -1.36155l.66b60 0_!>6 1_61664
-1.63386 1.04 -1 .. 80446101,3166 lile a.US6..
-0.69882 1.20 -0.154201.JdZa~_ .l.za. O.61oao
>-3.17585 ' 1.36 -3.60893',-3.277'56; 1.44 -3.07087'-3.97960-' '1.52- -3'.60565' '-,-1.2467, 1.60 -\1.50853
1.96522 1.68 2.7395040.87205 1.76 3.910763.54003 I.S4 2.70341
-4.85893 1.92 -5.85956-40.99016 2.00 -40.74410-3.d68l1 Z.08 -3.56956-1.95210 2.16 -0.31168
2.32623 2.24 1.91929_ -2.21457 2.32 -2.70998
O.Z4C!,d 2.40 1. 466543.02494 2.408 2.542650.000::3 9 z.se -2.00161
-0.1201-67 2.64- 0.931763.O:3a:;~ 2.12 2.135630.47244 2.00 1.08268;).22310 2.d8 5.a39902.58530 2.96 1.069552.Z63iS 3.-04 2,.332661.77822 3.12 1.709322.65143 3.20 1.41404
tg:;~ci:~3.28 -0.02297:3.36 a .. a8386
0.04961 3.44 1.40748J. 1 0368 J.S2 J ':35821
-~.03806 3.00 -3.12664-2.02400 3.08 -Z.42162-1.233bO 3.76 -0.78701-0-0.06102 3.04 -t.36£23-0.90879 3.92 -0.21325-1.::J3S;O 4.00 -1.di006
0.67257 4.08 0.685701.5813, 4.16 -5.12;96
-2.20801 4.24 ..'0.1339903.3~::S02 4.:52 J.3CS5962.10864 4.40 1.715882.32023 4.43 2:.6~10?)
-3.55.J15 4.56 -3.051183.,3 ~J{)f q;.04 3.:JIO'l3
-3.60470 4-.72 -2.06746~.OTd'l'4 "~O 1.437'022.26:.37.3 ~ .. (j8 2.20 ..01a. Ob6gJ 4.95 1.12:Z44
. I
20.25.
h 2501 •
(HORIZCJQiAC GRLQNO MOrION)
• 5.003350
t· • zs.710779
j
1, 225.7
MAkICiCNI.C jQU,CJibER 1

-115-
~~HO OF I~PUT OATA 0~~K .*~***•••••*••*•••~*.****.*.¥.***••~.***.~~.~.*~~*.*••••*.**~*••••*••*.*••**.****
o I I .!. ~ .3 .3 ,. " 5 ;; .. Q 7 7 <l•••• 6 •••• J •••• 5 •••• ~ •••• 5 •••• J •• ,.5 •••• J •••• ~ •••• J ••••a·"·Q·,··~·,•• Q ••••5 •• t.q".*.,,*•.**.**..*..,***.*...*******-..* ...--.**,*~.*~*,*.*~.*.**,,*••••••**••"'••*.....*...**.........
1 0I _t 60 • .372
n/olf; HISTORY9 1
..Z9999978u4 - 1. ':'7 ••U 1 lo..~.29~9Y9lBQ4 _1. 8Z~2111baa
-1.-l.
ANAt. •. 'COOl-LNG Tu ..eR iii TH F IXEO cA::iC;;9. J
1 01 qI 0
R017 117
"
1..
" O.d 352.8899 400.380
10 4?O.OOO11.333a l.uQue21.QQQt; .bpOZE3,OQo7~ .ooolE:5,6667¥; .831 JE
. 1 1 1
.5 .191!1;?u5.1 06 7E5.1911;+05.1067\;;,
.4looE
."lgDEe40looe:• '40·1 obE..... looi!.4JboE:
.4058e::-02
.46sac:-y2'''058e-0~.*05dE-02.4Q.QO~-'l.a
.4o5dE-O.i:!<hoooe .1007
.j .3 . .jI
1.3 5
31
.3 -'I
5
j .
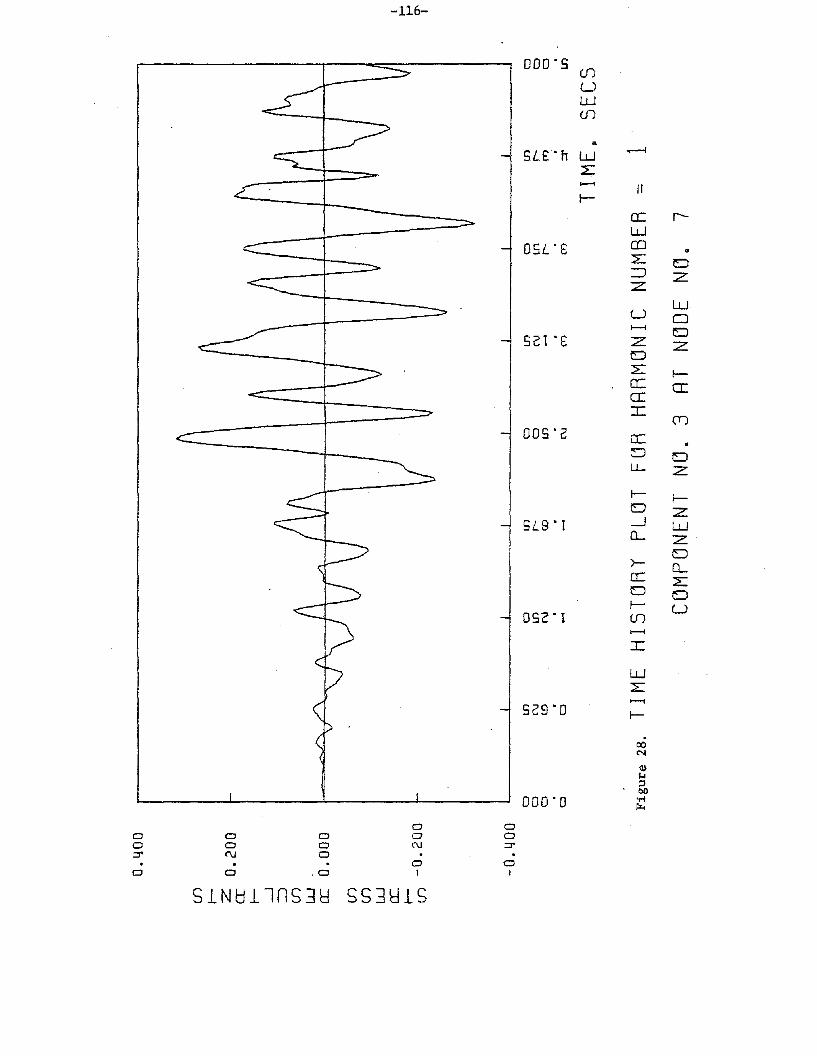
-116-
000"5(f)
UW(f)
~SL£"h w~1--1 1/I-
a: r-w
OSL"£ CD2: 0:::::J ZZ
UW0
1--1 0521 'S Z Z0:2: I-a: a::a::I
(I)
005"2 a: •0 0l..L. Z
l- I-0 z
5L9' ! -l W(l.- z'
0>- (l.-IT: ::E0 0I- U052'1 ())1--1
:r:
W::E-529'0 I-
00N
(l)~::lOJ)
000"0 .,..j
~
0 00 0 0 0 00 0 0 (\J ::::I"::::I" (\J 0 "
,. , , 0 00 0 .0 1 I
SlNCJllnS3tl SS381S

-117-
REFERENCES
1. Gupta, K.K., "Eigenvalue Solution by a Combined Sturm Sequence and
Inverse Iteration Technique", Int. J. num. Meth. Engng., Vol. 7,
1973, pp. 17-42.
2. Basu, P.K. and Gould, P.L., "SHORE-III Shell of Revolution Finite
Element Program - Static Case - Theoretical Manual, Research Report
No. 41; Users' Manual, Research Report No. 42, Structural Div.
Dept. of Civil Engineering, Washington University, March, 1975.
3. Sen, S.K. and Gould, P.L., "Free Vibration of Shells of Revolution
Using FEM", J. Engng., Mech. Div. ASCE, Vol. 100, No. EM2, Apr:f,l,
1974, pp. 283-303.
4. Basu, P.K., "Dynamic and Nonlinear Analysis of Shells of Revolution",
Doctoral Dissertation, Washington University, St. Louis, Missouri,
1977 •
5. Basu, P.K. and Gould, P.L., "SHORE-III Shell of Revolution Finite
Element Program - Theoret~cal Manual", Research Report No. 48,
"Users' Manual", Research Report No. 49, Structural Div., Dept.
of Civil Engrg., Washington University, Sept. 1977.
6. El-Shafee, a.M. and Gould, P.L., "Analytical Method for Determining
Seismic Response of Cooling Towers on Footing Foundation", Research
Report No. 55, Structural Div., Dept. of Civil Engrg., Washington
University, Sept. 1979.



















