WAMIT V70 Manual

of 360
-
Upload
marios-dias -
Category
Documents
-
view
225 -
download
0
Transcript of WAMIT V70 Manual
-
8/9/2019 WAMIT V70 Manual
1/359
-
8/9/2019 WAMIT V70 Manual
2/359
WAMIT R
USER MANUAL
Version 7.0This User Manual has been prepared for users of WAMIT Version 7.0.WAMIT is distributed by WAMIT, Inc. under a special agreement with the MassachusettsInstitute of Technology. Further information is available from the website shown below.The WAMIT software and this User Manual are Copyrighted by WAMIT, Inc., and bythe Massachusetts Institute of Technology. The User Manual can be downloaded from thewebsite without a license.
WAMIT, Inc.822 Boylston St. – Suite 202Chestnut Hill, MA 02467-2504USA phone 617-739-4488 fax 617-739-4499www.wamit.com
0–1
-
8/9/2019 WAMIT V70 Manual
3/359
-
8/9/2019 WAMIT V70 Manual
4/359
TABLE OF CONTENTS
1. INTRODUCTION1.1 WAMIT Version 71.2 Changes introduced in Version 7.0
2. GETTING STARTED2.1 Installation and setup2.2 Demonstration programs2.3 Standard test runs2.4 Running Test 012.5 Running Test 112.6 Other test runs2.7 Using multiple processors2.8 Memory and storage restrictions2.9 Modifying the input les
3. DEFINITION OF QUANTITIES EVALUATED BY WAMIT3.1 Hydrostatic data3.2 Added-mass and damping coefficients3.3 Exciting forces3.4 Body motions in waves3.5 Hydrodynamic pressure3.6 Free-surface elevation3.7 Velocity vector on the body and in the uid domain3.8 Mean drift force and moment3.9 Zero and innite wave periods
4. INPUT FILES4.1 Summary of changes in Version 7 input les4.2 The Potential Control File4.3 The Force Control File (Alternative form 1)4.4 The Force Control File (Alternative form 2)4.5 Denition of xed or free modes4.6 Body pressure and uid velocity at specied points4.7 Conguration les CONFIG.WAM and ∗.CFG4.8 Filenames list FNAMES.WAM4.9 File names4.10 File format4.11 Uniform arrays of eld points
4.12 Using the optional le BREAK.WAM4.13 Assigning RAO’S in an external le4.14 Evaluating FORCE outputs in POTEN (IFORCE=2)
0–3
-
8/9/2019 WAMIT V70 Manual
5/359
5. OUTPUT FILES5.1 The formatted output le (.out)5.2 Numeric output les5.3 Froude-Krylov and scattering forces5.4 Body pressure for the higher-order method5.5 Body pressure and velocity at specied points5.6 Auxiliary les for hydrostatics (.hst) and external forces (.mmx)5.7 Auxiliary output les for the geometry5.8 Error messages5.9 The log le (wamitlog.txt)5.10 The intermediate data transfer le (.p2f)
6. THE LOW-ORDER METHOD (ILOWHI=0)6.1 The Geometric Data File (GDF)6.2 Use of the source formulation (ISOR=1)6.3 Bodies with thin submerged elements
7. THE HIGHER-ORDER METHOD (ILOWHI=1)7.1 Subdivision of the body surface in patches and panels7.2 B-Spline representation of the solution7.3 Order of Gauss Quadratures7.4 The Geometric Data File7.5 Geometry represented by low-order panels (IGDEF=0)7.6 Geometry represented by B-Splines (IGDEF=1)7.7 Geometry represented by MultiSurf (IGDEF=2)7.8 Analytic representation of the geometry7.9 Modifying the DLL Subroutine GEOMXACT7.10 Bodies with thin submerged elements
7.11 The Optional Spline Control File7.12 The use of default values to simplify inputs7.13 Advantages and disadvantages of the higher-order method
8. ANALYSIS OF MULTIPLE BODIES (NBODY > 1)8.1 Input to FORCE (IALTFRC=1)8.2 Input to FORCE (IALTFRC=2)8.3 Input to FORCE (IALTFRC=3)8.4 Parameters in the conguration les8.5 Global symmetry indices8.6 Output
9. GENERALIZED BODY MODES (NEWMDS > 0)9.1 Input Files9.2 Using DEFMOD with the Low-Order Method9.3 Using the DLL Subroutine NEWMODES9.4 Hydrostatics9.5 NBODY Analysis
10. USE OF IRREGULAR FREQUENCY OPTION (IRR > 0)10.1 Input parameters10.2 Automatic free-surface discretization (IRR=2 and ILOWHI=0)
0–4
-
8/9/2019 WAMIT V70 Manual
6/359
10.3 Automatic free-surface discretization (IRR=3 and ILOWHI=0)10.4 Automatic free-surface discretization (IRR=3 and ILOWHI=1)10.5 Assigning different values of IRR for NBODY > 1
11. MEAN DRIFT FORCES USING CONTROL SURFACES11.1 Control surface le (CSF)11.2 Low-order control surface le11.3 Higher-order control surface le11.4 Combining two control surface les11.5 Automatic control surfaces11.6 Output
12. SPECIAL EXTENSIONS12.1 Internal tanks12.2 Trimmed waterlines12.3 Radiated waves from wavemakers in tank walls12.4 Bodies and wavemakers with vertical walls12.5 Bodies with pressure surfaces
13. THE F2T UTILITY13.1 Denitions of radiation and diffraction outputs13.2 Acquiring input data for F2T with WAMIT13.3 How to use F2T13.4 Output les13.5 Options 5 and 613.6 Theory13.7 Dimensional input and output data
14. COMPUTATIONAL TOPICS
14.1 Number of equations (NEQN) and left-hand sides (NLHS)14.2 Solution of the linear systems14.3 Temporary data storage14.4 Data stored in RAM14.5 Data stored in scratch les14.6 Multiple processors (NCPU > 1)14.7 Modifying DLL les14.8 Reserved le names
15. THEORY15.1 The boundary-value problem15.2 Integral equations for the velocity potential
15.3 Integral equations for the source formulation15.4 Discretization of the integral equations in the low-order method (ILOWHI=0)15.5 Discretization of the integral equations in the higher-order method (ILOWHI=1)15.6 Removal of irregular frequencies15.7 Integral equations for bodies with thin submerged elements15.8 Mean drift forces based on pressure integration15.9 Mean drift forces using control surfaces15.10 Internal tank effects15.11 Pressure surfaces
0–5
-
8/9/2019 WAMIT V70 Manual
7/359
REFERENCES
APPENDIX A – DESCRIPTION OF TEST RUNSA.1 Truncated vertical cylinder (TEST01)A.2 Irregular-frequency removal (TEST02)A.3 Local pressure drift force (TEST03)A.4 Body near a wall (TEST04)A.5 Multiple bodies (TEST05)A.6 The ISSC Tension-Leg Platform (TEST06)A.7 The ISSC Tension-Leg Platform (TEST07)A.8 Elastic column with generalized modes (TEST08)A.9 Spar with three strakes (TEST09)A.11 Higher-order analysis of circular cylinder (TEST11)A.12 Irregular-frequency removal (TEST12)A.13 Multiple bodies (TEST13)A.14 ISSC TLP (TEST14)A.15 Semi-Sub (TEST15)A.16 Barge with bending modes (TEST16)A.17 Cylinder with moonpool (TEST17)A.18 Elastic column (TEST18)A.19 Catamaran barge (TEST19)A.20 MultiSurf Barge (TEST20)A.21 Spar with three strakes (TEST21)A.22 FPSO with two internal tanks (TEST22)A.23 Radiated wave eld from a bank of wavemakers (TEST23)A.24 Motions of a hinged vessel (TEST24)A.25 Air-cushion vessel with pressure chambers (TEST25)
APPENDIX B – FILE CONVERSION USING THE UTILITY V6V7inp
APPENDIX C – USING THE WAMIT-RGKERNEL INTERFACE (By J. S. Letcher, Jr.)
0–6
-
8/9/2019 WAMIT V70 Manual
8/359
Chapter 1
INTRODUCTION
WAMIT Version 7 is a radiation/diffraction panel program developed for the linear analysisof the interaction of surface waves with various types of oating and submerged structures.WAMIT Version 6.4S, which is described in a separate User Manual [29] 1, performs theextended analysis for the second-order solution in bichromatic and bidirectional waves,including sum- and difference-frequency components.
Version 7 has been developed to exploit important features of contemporary computingsystems, especially in the PC environment. For systems with relatively large random-accessmemory (RAM) and with multiple processors (CPUs, also known as ‘cores’), Version 7 isdeveloped to take advantage of these features with substantial reductions of the computingtime in many applications. Another important development in this context is the 64-bitoperating system, which is essential for data access with large RAM.
The remainder of this Chapter gives a general description of WAMIT Version 7, andchanges made from earlier versions. Users of earlier versions should refer particularly toSection 1.2 which lists the changes introduced in Version 7.0. A mark in the left margin,as on this line, is used throughout this User Manual to call attention to changes in Version7.0.
WAMIT includes options to use either the traditional low-order panel method or a moreversatile higher-order method based on B-splines. The description and use of WAMIT forboth the low-order and higher-order methods of solution has been unied as much aspossible. Most of the input and output les are ‘generic’, applicable to both methods inthe same form. The principal exception is the Geometric Data File, which species thegeometry of the body surface. To simplify the understanding and use of this User Manual,chapters are organized separately for generic information common to both methods, andfor specic information which refers to either the low- or higher-order method separately.
In Chapter 2 a tutorial description is given to help users get started using WAMIT inthe PC/Windows environment. The examples described in Chapter 2 are for the simplestcontext of a single body.
1 Throughout this User Manual numbers in square brackets refer to the references listed after Chapter 15
1–1
-
8/9/2019 WAMIT V70 Manual
9/359
Chapter 3 denes the various quantities which can be evaluated by WAMIT, and whichare contained in the output les.
Chapter 4 gives more detailed information regarding the generic input les, including
the Potential Control File (POT) and Force Control File (FRC) which specify the principalnon-geometric inputs for WAMIT. Also described in this Chapter are the les fnames.wam ,config.wam and break.wam , which are useful to specify input lenames and various pa-rameters or options.
Users of Version 6 should note that some changes have been made which are intendedto make the input data more consistent. As a result, Version 7 may require modicationsof old input les, as explained in Section 4.1. Appendix B describes the utility v6v7inp ,which has been prepared to automate the conversion of old input les.
Chapter 5 describes the output les, which contain the principal data computed by theprogram as well as log les, error les, and auxiliary les which provide useful informationregarding the geometry of the structures.
Chapter 6 describes topics which are specic to the low-order method. These include thelow-order Geometric Data File (GDF), which denes the coordinates of panel vertices, theuse of the source formulation to evaluate the uid velocity and second-order mean pressureon the body surface, and the analysis of bodies with thin elements such as damping platesor strakes.
Chapter 7 describes topics which are specic to the higher-order method, including thesubdivision used to represent the body surface and velocity potential on this surface, andthe representation of the potential in terms of B-splines. Alternative methods for deningthe body geometry are described including the use of low-order panels, the use of B-splinesto provide a higher-order continuous denition, the use of explicit analytical formulae, andthe use of MultiSurf geometry les.
Chapters 8-12 describe several extended features in WAMIT. These include the analysisof multiple interacting bodies ( Chapter 8 ), the use of generalized modes of body motionwhich can be used to describe structural deformations, motions of hinged bodies, etc.(Chapter 9 ), and the use of a method to remove the effect of the irregular frequencies(Chapter 10 ). Chapter 11 describes the procedure for evaluating the mean drift forces andmoments by integration of the momentum ux on a control surface which surrounds thebody in the uid. Chapter 12 describes additional extensions to include the dynamics of uid in internal tanks, trimmed waterlines, radiated waves from wavemakers, interactionsof bodies and wavemakers with vertical walls, and applications where part or all of thebody surface consists of free surfaces with oscillatory pressures.
Chapter 13 describes the utility F2T (Frequency-to-Time domain) which is used totransform the linear WAMIT outputs to the corresponding time-domain impulse-responsefunctions.
Chapter 14 describes various computational topics including temporary data storage,numbers of unknowns, and input parameters, to provide a qualitative basis for estimatingthe requirements for RAM and hard disk storage, and for estimating run times. Instructionsare provided for using multiple processors and extended RAM to reduce run times. Section
1–2
-
8/9/2019 WAMIT V70 Manual
10/359
14.7 outlines the procedure for modication and use of .dll les to describe the geometryand generalized modes. Section 14.8 lists the reserved lenames used by the program.
A brief outline for the theoretical basis of WAMIT is presented in Chapter 15 . Reference
26 contains a more complete review of the pertinent theory.A list of relevant references is included after the nal chapter. Appendix A includes de-
scriptions of the standard test runs. Appendix B documents the use of the utility v6v7inpfor converting Version 6 input les. Appendix C describes the use of the interface betweenWAMIT and the MultiSurf kernel.
1.1 WAMIT Version 7
WAMIT is a radiation/diffraction program developed for the analysis of the interactionof surface waves with offshore structures. WAMIT is based on a three-dimensional panelmethod, following the theory which is outlined in Chapter 15 . The water depth can beinnite or nite. Either one or multiple interacting bodies can be analyzed. The bodiesmay be located on the free surface, submerged, or mounted on the sea bottom. A varietyof options permit the dynamic analysis of bodies which are freely oating, restrained, orxed in position. In addition to the conventional case where the bodies are rigid, andmoving with six modes of rigid-body motion, WAMIT permits the analysis of ‘generalizedmodes’ to represent structural deections, motions of hinged vessels, devices for wave-energy conversion, etc. Part or all of the boundary surface can be dened as a free surfacewith an oscillatory pressure, as in the case of an air-cushion vehicle or oscillating watercolumn.
The ow is assumed to be ideal and time-harmonic. The free-surface condition is lin-earized (except in Version 6.4S where the second-order free-surface condition and bodyboundary conditions are imposed). We refer to this as the ‘linear’ or ‘rst-order’ analysis.Mean second-order forces are included in this analysis, since they can be computed rig-orously from the linear solution. The radiation and diffraction velocity potentials on thebody wetted surface are determined from the solution of an integral equation obtained byusing Green’s theorem with the free-surface source-potential as the Green function.
The rst versions of WAMIT (up to and including Version 5) were based entirely onthe low-order panel method. There the geometric form of the submerged body surface isdened by at quadrilateral elements (low-order panels), and the solutions for the veloc-ity potential and/or source strength are assumed constant on each panel. Starting with
Version 6 WAMIT was extended to include as an alternative option a higher-order panelmethod based on a continuous B-spline representation for the velocity potential, and sev-eral alternative schemes for dening the geometry of the body surface. The order of theB-splines is controlled by user-specied input parameters.
The two different uses of the word order should be noted to avoid confusion. Followingthe usual conventions of marine hydrodynamics, rst-order and second-order are alwaysused here to refer to linearization of the boundary conditions and solution, whereas low-order and higher-order refer to the method for representation of the body surface and
1–3
-
8/9/2019 WAMIT V70 Manual
11/359
solution.The following quantities can be evaluated by WAMIT:
• Hydrostatic coefficients• Added-mass and damping coefficients for all modes• Wave exciting forces and moments using the Haskind relations, or directly by pressure-integration from the solutions of the diffraction or scattering problems.• Motion amplitudes and phases for a freely-oating body• Forces restraining a body which is freely-oating in some but not all modes• Hydrodynamic pressure and uid velocity on the body surface
• Hydrodynamic pressure and uid velocity in the uid domain
• Free-surface elevation• All components of the drift force and moment by momentum integration over a controlsurface• Horizontal drift forces and mean yaw moment by momentum integration in the far-eld• All components of the drift force and moment by local pressure integration over thebody surface
• Drift force and moment in bidirectional waves
Two, one or no planes of geometric symmetry may be present. Part or all of the rigid-body modes can be analyzed. The program is designed to optimize the use of the availablestorage and minimize the computational effort for the specied planes of symmetry andmodes.
Several techniques have been developed and implemented in WAMIT to improve theaccuracy and efficiency of the solution and exploit the capabilities of a wide range of contemporary computing systems, ranging from personal computers to supercomputers.Important features include the use of special algorithms for the evaluation of the free-surface wave-source potential, the option to use direct, iterative, or block-iterative solutionalgorithms for the complex matrix equation, and the option to use either the low-orderor higher-order panel methods. Version 7 has been developed to exploit the additionalfeatures of multiple processors, 64-bit operating systems, and optimum use of availableRAM. In combination these result in a fast, versatile, and robust code capable of analyzinga wide variety of offshore structures.
WAMIT consists of two subprograms, POTEN and FORCE, which normally are runsequentially. POTEN solves for the radiation and diffraction velocity potentials (and sourcestrengths) on the body surface for the specied modes, frequencies and wave headings.FORCE computes global quantities including the hydrodynamic coefficients, motions, and
1–4
-
8/9/2019 WAMIT V70 Manual
12/359
rst- and second-order forces. Velocities and pressures on the body surface are evaluatedby FORCE. Additional eld data may also be evaluated by FORCE, including velocitiesand pressures at specied positions in the uid domain and wave elevations on the freesurface. Since the principal computational burden is in POTEN, the intermediate outputdata from this subprogram is saved in a binary ‘P2F’ le. Thus it is possible to makemultiple runs with FORCE, varying the requested parameters to be output, without re-running POTEN in each instance. (The evaluation of drift forces using a control surfaceis an exception where the computational burden in FORCE may be greater than that inPOTEN.)
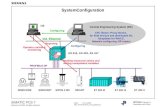
Figure 1.1 shows the architecture of the two subprograms and the principal input/outputles. (For simplication this gure does not include additional input les required for thecase of multiple bodies, the optional spline control le which may be used to vary B-splineparameters in the higher-order analysis, and output les which log errors, warnings, andother auxiliary data.)
The analysis for the generalized modes also requires an additional input le or specialsubroutine, to dene the user-specied modes. Figure 9.1 in Chapter 9 shows the owchart of POTEN for this case.
1–5
-
8/9/2019 WAMIT V70 Manual
13/359
-
8/9/2019 WAMIT V70 Manual
14/359
1.2 CHANGES INTRODUCED IN Version 7.0
New features which are included starting in Version 7.0 are outlined below.
• For runs where NBODY > 1 global planes of symmetry can be used if the body geom-etry is suitable (see Section 8.5).• When the higher-order method ( ILOWHI=1 ) is used, patch data are output in thewamitlog.txt le if NPER=0, to assist in checking the geometry.• Part or all of the boundary surface associated with the bodies can be dened as a freesurface with oscillatory pressure distribution (see Section 12.5).• The mean drift forces can be evaluated using control surfaces without evaluating thesame forces from pressure integration (see Chapter 11 ).• When the mean drift forces are evaluated from pressure integration, points wherethe velocity on the body surface exceeds a specied limit can be output in the le
wamitlog.txt , using the parameter VMAXOPT9 in the CFG le (see Section 4.7).
• The conguration parameter TOLGAPWL can be used to adjust the tolerance for gapsbetween adjacent elements of the body waterline (see Section 4.7).• The conguration parameter RAMGBMAX can be used to take maximum advantageof the computer’s available RAM for storage of temporary scratch les. Depending
on the input parameters of the run and the hardware, this can be used to achievesubstantial savings in run time. (See Sections 4.7 and 14.3).
• Version 7.0 is compiled with the Intel Fortran Compiler Version 12.1, using specialdirectives to provide parallel processing on systems with multiple processors. Thiscan result in signicant reductions of run times with a single processor, and dramaticreductions with multiple processors. (See Section 14.6).
• The separate Froude-Krylov and scattering components of the exciting force and mo-ment can be evaluated by using the extended options OPTN(2:3)=2. (See Sections4.3 and 5.3.)
• Both conguration les config.wam and *.cfg can be used to input the congurationparameters. (See Section 4.7).
• New algorithms are used to evaluate the Rankine and log singularities in the low-ordermethod• The option IFORCE=2 can be used to run FORCE and POTEN in the same periodloop and obtain portions of the numeric output les before the run is completed (See
Section 4.14).
• The number of processors used and estimated RAM required for the run are outputin the le wamitlog.txt .
1–7
-
8/9/2019 WAMIT V70 Manual
15/359
• Several changes have been introduced to simplify the input les and to use a moreconsistent notation for the numeric output les (See Section 4.1).
• The conguration parameter IPERIO has been replaced by two parameters IPERIN,IPEROUT to control the denitions of both the input and output of the wave periodarray (See Section 4.7).
• The auxiliary output le .mmx has been added to output external force matrices (mass,damping, stiffness) and other quantities used for post-processing (See Section 5.6).
1–8
-
8/9/2019 WAMIT V70 Manual
16/359
Chapter 2
GETTING STARTED
In this Chapter instructions are provided for installing WAMIT and making simple testruns in the PC/Windows environment. The basic sequence in a typical application of WAMIT is (1) prepare the input les; (2) run WAMIT. The principal results are thencontained in output les which may be printed and post-processed. This architecture isillustrated in Figure 1.1.
The two principal subprograms of WAMIT are POTEN and FORCE. POTEN solvesfor the velocity potential on the body surface, and optionally also for the source strength.FORCE evaluates physical parameters including the force and motion coefficients, and elddata including the uid pressure, velocity, and free-surface elevation. The principal inputles to the subprogram POTEN are the Potential Control File (POT) which speciesparameters including the uid depth, wave periods, and wave heading angles, and the
Geometric Data File (GDF) , which describes the geometry of the structure to be analyzed.These les are discussed briey below, and in more detail in subsequent Chapters. Theprincipal input les to the subprogram FORCE are the Force Control File (FRC) , whichspecies inputs regarding the body dynamics, and the P2F le (‘Poten to Force’) whichtransfers data from POTEN to FORCE.
Three additional input les should also be used: (1) Licensed users of WAMIT V7PCmust utilize a unique input le userid.wam , which identies the license; (2) the optionalinput le fnames.wam is recommended to specify the input lenames; and (3) the congu-ration les (config.wam and/or *.cfg ) specify parameters and options which are requiredby the program. Samples of the fnames.wam and conguration les are included with thetest runs; for example the les test01.wam and test01.cfg are intended for use withTEST01 .
By default in WAMIT, the le fnames.wam lists the lenames of the POT, CFG, andFRC les. The GDF lenames are included in the POT le.
In Version 7 it is possible to use both the config.wam and *.cfg les together, asexplained in Section 4.7. It is recommended to use config.wam to specify inputs which arethe same for most or all runs, and to use *.cfg with an appropriate lename to specifyinputs which are specic to that particular run. Thus the le config.wam delivered with the
2–1
-
8/9/2019 WAMIT V70 Manual
17/359
standard test runs includes the parameters RAMGBMAX, NCPU, and USERID PATH,which are the same for all test runs; the other parameters required for each run are inputin the separate les test*.cfg .
2.1 INSTALLATION AND SETUP
The WAMIT software includes the main executable program wamit.exe , the DLL leslisted below, a complete set of input les for the standard test runs TESTn (n=01,02, ...),and the formatted output les TESTn.OUT for these test runs.
The PC-executable Version 7PC includes additional dynamic link library les (DLL)which must be installed in the same directory (i.e. ‘folder’) as the executable le wamit.exe ,or in a different folder which is included in the system path. If these DLL les are missingthe program will not run, regardless of the inputs and options specied. The required DLL
les include special WAMIT DLL les and also special Intel or Microsoft DLL les. Thethree required WAMIT DLL les aregeomxact.dllnewmodes.dllrg2wamit.dll
The extended Version including the capability to input MultiSurf models requires oneadditional DLL le, rgkernel.dll , and an extended version of rg2wamit.dll , as explainedin Section 7.7.
Version 7PC is compiled using Intel Visual Fortran (IVF), Version 12.1. The followingDLL les are required to run executable code compiled with IVF:
libifcoremd.dlllibmmd.dlllibiomp5md.dll msvcr100.dllsvml dispmd.dll
These DLL les are distributed by Intel and may be redistributed to all users. Copies of these les are included with each distribution of WAMIT. Users may encounter a problemon some older PC systems, indicated by the runtime error message ‘The system cannotexecute the specied program’. This problem can be overcome by downloading and in-stalling the Microsoft Visual C++ 2005 Redistributable Package, which is available from
Microsoft.Before installing the software a new main directory (folder) should be made. Therecommended name is c: \wamitv7 , but the user may prefer to use a different drive ordirectory name, with a maximum length of 40 characters for the string. The software mustbe unzipped using a local utility, and all unzipped les should be saved in the directoryc: \wamitv7 and in subdirectories corresponding to those in the zip le. If a different driveor directory name is used, this must be specied as USERID PATH in the congurationle, as explained in Section 4.7. The text le readme.txt includes an outline of the
2–2
http://go.microsoft.com/fwlink/?linkid=65127http://go.microsoft.com/fwlink/?linkid=65127http://go.microsoft.com/fwlink/?linkid=65127
-
8/9/2019 WAMIT V70 Manual
18/359
directory tree and les. If any difficulties are encountered during installation and testingthe user should conrm that the subdirectories and les correspond to the description inreadme.txt .
2.2 DEMONSTRATION PROGRAMS
A special demonstration version of WAMIT can be downloaded in .zip format from theweb site www.wamit.com . This program, wamit demo.exe , can be used for demonstrationpurposes without obtaining an end-user license, subject to the conditions stated in thewebsite. The installation and use of this software are the same as the licensed version,with the following exceptions:
• The program only accepts geometry inputs from the standard input les for the testruns described in the Appendix .• The site license identication le userid.wam and some DLL les are not required.• The program runs are interrupted after display of the header, and the user is promptedto press the Enter key to continue the run.The downloadable zip le includes all of the input les required to execute the standard
test runs.
2.3 STANDARD TEST RUNS
Various standard test runs are available to illustrate different types of applications andfeatures of the program. The results of these test runs can be used to conrm that theinstallation and setup of the program have been performed correctly by the user. Thetest runs also provide opportunities to use (and modify) existing input les, for tutorialpurposes. The remainder of this Chapter is intended to guide new users through theseprocedures. Descriptions of each test run are included in Appendix A .
If the WAMIT software is installed in accordance with the instructions above, the re-quired .EXE, .DLL, and userid.wam les will be installed in the directory c: \wamitv7 .All required input les for the standard test runs will be copied to the subdirectoryc:
\wamitv7
\testruns . Benchmark versions of the output les test*.out will be copied to
the subdirectory c: \wamitv7 \testruns \out . These benchmark output les can be com-pared with results obtained by the user to ensure that the software is installed correctly.Before running WAMIT with the standard test runs, the user should (1) open a DOS
Command Prompt Window (in the Windows environment a Command Prompt Window isopened by clicking on ‘Start’, ‘Programs’, ‘Command Prompt’), and (2) change the defaultsubdirectory by entering the command cd \wamitv7 \testruns .
Since the executable le wamit.exe is resident in the directory c: \wamitv7 , the appro-priate command to execute WAMIT is ‘ c: \wamitv7 \wamit ’. There are three alternative2–3
http://www.wamit.com/http://www.wamit.com/http://www.wamit.com/
-
8/9/2019 WAMIT V70 Manual
19/359
shortcuts which may be used to simplify this command: (1) add c: \wamitv7 to the systemPATH, (2) copy the les wamit.exe , *.dll , and userid.wam from this directory to an-other directory which is included in the PATH, or (3) use the batch le wamit.bat whichis supplied in the testruns subdirectory.
2.4 RUNNING TEST01
Test run 01 evaluates the added-mass and damping coefficients, exciting forces, motions,wave elevations, eld pressures, uid velocities and drift forces for a freely-oating trun-cated vertical circular cylinder of radius 1.0m and draft 0.5m in innite water depth forthree wave periods and one wave heading angle. Further details are contained in SectionA.1 in Appendix A.
The corresponding input les test01.gdf , test01.cfg , test01.pot , and test01.frc
are included in the subdirectory c: \wamitv7 \testruns . In order to specify the appropriatelenames during the run, rst copy the le test01.wam to the le fnames.wam . (Copyingis recommended, in preference to renaming the le, to preserve the original le.) Theappropriate DOS command is
copy test01.wam fnames.wam
Next enter wamit to start the run. During execution of the subprogram POTEN themonitor displays the starting time, and after the solutions for the velocity potentials areobtained for each wave period a new line of information is displayed including the wave pe-riod, time, and the maximum number of iterations required for the radiation and diffraction
solutions. After the rst wave period the computational time required for each subsequentperiod is reduced, since the integration of the Rankine components of the source potentialare evaluated initially and saved for reuse. After the last period the le test01.p2f is savedon the disk, storing the velocity potentials and other inputs to the subprogram FORCE.Output from FORCE will appear relatively quickly on the screen, and the same outputis stored in the le test01.out . The latter le includes useful identication informationconcerning the inputs, body parameters, run times and dates. This is followed for each pe-riod by tabulations of the hydrodynamic parameters requested in test01.frc . Assumingthe standard version of test01.out has been saved in a subdirectory, as recommended inSection 2.1, the data in the new version of test01.out can be compared with the standardle with the same name. On a contemporary PC the total run time for TEST01 should be
a few seconds.
2.5 RUNNING TEST11
TEST11 is intended to complement TEST01 , using the higher-order method of solution(ILOWHI=1). The body dimensions and other inputs are the same, but the surface of the cylinder and the solution for the velocity potential are represented in a more accurate,continuous manner by B-splines, as explained in Chapter 7 .
2–4
-
8/9/2019 WAMIT V70 Manual
20/359
To run TEST11 follow the same procedure outlined above for TEST01, but replace ‘01’by ‘11’ in all references to lenames. A comparison of the results from these complementarytests is summarized in Section A.11 of Appendix A.
2.6 OTHER TEST RUNS
The procedure for running the other test runs is the same as explained above, except forcopying the appropriate les to fnames.wam from the original versions test*.wam where‘*’ is the test number.
A special batch le runtests.bat is included in the licensed version and a similarle rundemo.bat in the demonstration version. Executing the corresponding batch lecommand will run all of the tests in succession. The display shown on the monitor givessome indication of the progress through the set of runs from test01 to test25. The entire
set of runs may take several minutes, depending on the computer.
2.7 USING MULTIPLE PROCESSORS
In Version 7 parallel processing can be performed on systems with multiple processors(CPU’s, also known as ‘cores’). Depending on the inputs and hardware, the total run timecan be reduced substantially. If the system includes more than one CPU, open the leconfig.wam with a text editor. The default settings in this le are as follows:
NCPU=1
RAMGBMAX=0.5USERID_PATH=\wamitv7
Edit the rst line to show the actual number of CPU’s on the system, and save the editedle with the same name. With this change the total run time for all of the standardtests should be substantially reduced. Test14a is a particularly good example, as noted inAppendix A.14 .
Instructions for nding the number of CPU’s on the system are in Section 14.6.Depending on the size of the system RAM it may be appropriate to change the parameter
RAMGBMAX, following the guidelines in Section 14.3. The value 0.5 is sufficient for allof the test runs unless NCPU is greater than 16. For older systems with less than 1Mb of RAM the parameter RAMGBMAX should be reduced to about half of the available RAM.
2.8 MEMORY AND STORAGE RESTRICTIONS
WAMIT uses scratch les on the hard disk for temporary storage at runtime. Dependingon the run parameters, the total number of scratch les and/or their size may become quite
2–5
-
8/9/2019 WAMIT V70 Manual
21/359
large. Normally these les are deleted by WAMIT after the les are no longer needed, andbefore the program stops. However some PC/Windows congurations save these deletedles in a ‘recycled’ directory, and this can cause the hard disk to become overloaded. Userswho experience this problem should delete the accumulated les in the recycled directory,or alternatively change their system setup to avoid saving a backup of all deleted les.
2–6
-
8/9/2019 WAMIT V70 Manual
22/359
2.9 MODIFYING THE INPUT FILES
A text editor can be used to edit the input les. Users should refer to Chapter 4 for a
complete explanation of the data in these les. A few simple modications will be outlinedhere for tutorial purposes, in the context of Test Run 01. Before proceeding further checkthat the le fnames.wam corresponds to this test run, or re-copy test01.wam to fnames.wamfollowing the instructions in Section 2.4.
As the rst modication we might request FORCE to perform additional computations,for the same periods and wave headings analyzed by POTEN, but with modied values of the vertical center of gravity (VCG) and radii of gyration (XPRDCT) in the force controlle test01.frc . In the standard le VCG=0.0 (center of gravity in the waterplane) andthe radii of gyration are set equal to 1.0 (the three diagonal elements of the XPRDCTmatrix). A positive VCG will move the center of gravity above the waterplane, reducing thepitch/roll hydrostatic stability and affecting these RAO’s in longer wave periods. Modifying
the radii of gyration should change the same RAO’s primarily at shorter wave periods. It isnot necessary to re-run POTEN in this case, provided the le test01.p2f has been retainedfor the POTEN output. To avoid the extra run time of POTEN, add the line IPOTEN=0to the conguration le test01.cfg (See Section 4.7, and also the le test17b.cfg whichincludes the same line). After modications are made to the le test01.frc it is advisableto save the modied le with a different lename, and to edit the fnames.wam le to showthe corresponding new lename for the force control le. If this procedure is followed, theoutput le will carry the same lename (with the .out extension) to distinguish it from theoriginal le test01.out . The user may then compare the RAO’s in the different outputles to discern the effect of these changes.
As the second modication WAMIT may be re-run with a more extensive list of waveperiods. Edit the potential control le test01.pot with the following changes:
• on line 5 change the number of wave periods (NPER) from 3 to 10• on line 6 replace the three original wave periods by ten new periods in decimal format• depending on your preference, (1) save the modied le with the original nametest01.pot , or (2) save the modied le with a new lename and correct the fnames.wam
le on line 2 with this new lename.
Since it is necessary to re-run POTEN in this case, delete the line IPOTEN=0 if thiswas added to test01.cfg . During the run, if the original lename test01.p2f is retained,the user will be prompted whether or not to overwrite the old output le test01.p2f ;overwriting is the simplest procedure to follow, in this circumstance, otherwise the new.P2F lename must be specied before the FORCE run is executed.
The input les for other test runs can be used to illustrate various options and modi-cations.
2–7
-
8/9/2019 WAMIT V70 Manual
23/359
Chapter 3
DEFINITION OF QUANTITIESEVALUATED BY WAMIT
Cartesian coordinates are used to dene the body geometry, forces, and other hydrody-namic quantities evaluated by WAMIT. These are output in nondimensional forms, interms of the appropriate combinations of the water density ρ, the acceleration of gravity g,the incident-wave amplitude A, frequency ω, and the length scale L dened by the inputparameter ULEN in the GDF le. The notation and denitions of physical quantities herecorrespond with those in Reference [ 3], except that in the latter reference the y axis isvertical.
The body geometry, motions and forces are dened in relation to the body coordinates(x,y,z ), which can be different for each body if multiple bodies are analyzed. The z -axis
must be vertical, and positive upwards. If planes of symmetry are dened for the body, theorigin must be on these planes of symmetry. The global coordinates ( X,Y,Z ) are denedwith Z = 0 in the plane of the undisturbed free surface, and the Z -axis positive upwards.The body coordinates for each body are related to the global coordinates by the arrayXBODY dened in Section 4.2.
The incident-wave system is dened relative to the global coordinate system, and thephases of the exciting forces, motions, pressure and uid velocity are dened relative tothe incident-wave elevation at X = Y = 0. These outputs are dened in the general form
Re (U + iV )eiωt = W cos(ωt + δ ). (3.1)
where W = |U + iV | is the modulus and δ is the phase. With reference to equations (15.2)and (15.4), the incident-wave elevation at X = Y = 0 is equal toRe(Aeiωt ) = A cos(ωt). (3.2)
If δ > 0 the output leads the phase of the incident wave, and if δ < 0 the output lags theincident wave.
For eld data (pressure, velocity, and free-surface elevation) and mean drift forces thedenitions given below in Sections 3.5-3.8 apply to the complete solution for the combined
3–1
-
8/9/2019 WAMIT V70 Manual
24/359
radiation and diffraction problems. The components of the eld data can be evaluated sep-arately for either the radiation or diffraction problems using the conguration parametersINUMOPT5 and INUMOPT6, as explained in Sections 4.7 and 5.2.
For the sake of simplicity, the denitions which follow in this Section assume that theorigin of the body coordinate system is located on the free surface. Special denitionsapply to some quantities if vertical walls are dened, as explained in Section 12.4.
3–2
-
8/9/2019 WAMIT V70 Manual
25/359
3.1 HYDROSTATIC DATA
All hydrostatic data can be expressed in the form of surface integrals over the mean body
wetted surface S b, by virtue of Gauss’ divergence theorem.Volume:
∀ = − S b n1xdS = − S b n2ydS = − S b n3zdS All three forms of the volume are evaluated in WAMIT, as independent checks of the
panel coordinates, and printed in the summary header of the output le where they aredenoted by (VOLX, VOLY, VOLZ) respectively. The median volume of the three volumesis used for the internal computations. If it is less than 10 − 30 , a warning is displayed andthe coordinates of the center of buoyancy are set equal to zero. For bottom-mountedstructures, where panels are not dened on the bottom, VOLZ differs from the correctsubmerged volume by the product of the bottom area and depth.Coordinates of center of buoyancy:
xb = −12∀ S b n1 x2dS
yb = −12∀ S b n2 y2dS
z b = −12∀ S
b
n3z 2dS
Matrix of hydrostatic and gravitational restoring coefficients:
C (3, 3) = ρg S b n3dS C̄ (3, 3) = C (3, 3)/ρgL2
C (3, 4) = ρg S b yn3dS C̄ (3, 4) = C (3, 4)/ρgL3
C (3, 5) = −ρg S b xn 3dS C̄ (3, 5) = C (3, 5)/ρgL3
C (4, 4) = ρg S b y2n3dS + ρg∀z b −mgz g C̄ (4, 4) = C (4, 4)/ρgL 4C (4, 5) = −ρg S b xyn 3dS C̄ (4, 5) = C (4, 5)/ρgL
4
C (4, 6) = −ρg∀xb + mgxg C̄ (4, 6) = C (4, 6)/ρgL 4C (5, 5) = ρg
S b x2n3dS + ρg
∀
z b
−mgz g C̄ (5, 5) = C (5, 5)/ρgL 4
C (5, 6) = −ρg∀yb + mgyg C̄ (5, 6) = C (5, 6)/ρgL 4where C (i, j ) = C ( j, i ) for all i, j , except for C (4, 6) and C (5, 6). For all other values of the indices i, j , C (i, j ) = 0 . In particular, C (6, 4) = C (6, 5) = 0.
In C(4,4), C(4,6), C(5,5) and C(5,6), m denotes the body mass. When Alternativeform 1 is used for the FRC le (Section 4.3) the body mass is computed from the relationm = ρ∀. When Alternative form 2 is used for the FRC le (Section 4.4) the body mass isdened by EXMASS(3,3).
3–3
-
8/9/2019 WAMIT V70 Manual
26/359
3.2 ADDED-MASS AND DAMPING COEFFICIENTS
Aij − iω
B ij = ρ
S b
n iϕ j dS
Āij = AijρLk
B̄ ij = BijρLk ω
.
Here
k = 3 for (i, j = 1, 2, 3)k = 4 for (i = 1, 2, 3, j = 4, 5, 6) o r (i = 4, 5, 6, j = 1, 2, 3)k = 5 for (i, j = 4, 5, 6)
3.3 EXCITING FORCES
a) Exciting forces from the Haskind relations
X i = −iωρ S b n iϕ0 −ϕi ∂ϕ0∂n dS b) Exciting forces from direct integration of hydrodynamic pressure
X i = −iωρ S b n iϕD dS X̄ i =
X iρgALm
,
where m = 2 for i = 1, 2, 3 and m = 3 for i = 4, 5, 6.The separate Froude-Krylov and scattering components of the exciting forces can be
evaluated, using the options IOPTN(2)=2 and IOPTN(3)=2 as described in Section 4.3.The Froude-Krylov component is dened as the contribution from the incident-wave po-tential ϕ0 and the scattering component is the remainder. Using the Haskind relations,
these two components correspond respectively to the contributions from the rst and sec-ond terms in parenthesis in the equation above. Using direct integration they correspondto the components of the total diffraction potential ϕD in equation 15.8.
3–4
-
8/9/2019 WAMIT V70 Manual
27/359
3.4 BODY MOTIONS IN WAVES
Two alternative procedures are followed to evaluate the body motions in waves, corre-
sponding respectively to the Alternative 1 (Section 4.3) and Alternative 2 (Section 4.4)FRC control les.In Alternative 1 , which is restricted to a body in free stable otation without external
constraints, the following relations hold
m = ρ∀xb = xg , yb = yg
where m is the body mass and ( xg , yg , z g) are the coordinates of the center of gravity.The inertia matrix is dened as follows.
M =
m 0 0 0 mz g −myg0 m 0 −mz g 0 mxg0 0 m myg −mx g 00 −mz g myg I 11 I 12 I 13mz g 0 −mx g I 21 I 22 I 23−myg mxg 0 I 31 I 32 I 33
. (3.3)
WAMIT equates the body mass to the mass of the displaced water in free otation. Themoments of inertia I ij are dened in terms of the corresponding radii of gyration r ij , denedby the relation
I ij = ρ∀r ij |r ij |.The array XPRDCT(I,J) input to WAMIT contains the radii of gyration input with thesame units of length as the length scale ULEN dened in the panel data le.
In the Alternative 2 format of the FRC le the matrices M ij + M E ij , BE ij and C E ij areinput by the user to include the possibility of external force/moment constraints acting onthe body.
The complex amplitudes of the body’s motions ξ j are obtained from the solution of the6×6 linear system, obtained by applying Newton’s law
6
j =1 −ω2(M ij + M E ij + Aij ) + iω(B ij + B
E i,j ) + ( C ij + C
E ij ) ξ j = X i .
where the matrices M E ij , B E ij and C E ij are included only in the Alternative 2 case. Note thatin the Alternative 2 case the user must specify the body inertia matrix M ij and include itin the total inertia matrix M ij + M E ij specied in the FRC le.
3–5
-
8/9/2019 WAMIT V70 Manual
28/359
The non-dimensional denitions of the body motions are
ξ̄ i = ξ i
A/Ln ,
where n = 0 for i = 1, 2, 3 and n = 1 for i = 4, 5, 6. The rotational motions ( ξ 4, ξ 5, ξ 6) aremeasured in radians.
3.5 HYDRODYNAMIC PRESSURE
The complex unsteady hydrodynamic pressure on the body boundary or in the uid domainis related to the velocity potential by the linearized Bernoulli equation
p = −ρ∂ϕ∂t .
The total velocity potential is dened by
ϕ = ϕD + iω6
j =1ξ jϕ j ,
where the radiation and diffraction velocity potentials are dened in Section 15.1. Thenondimensional velocity potential and hydrodynamic pressure are dened as follows:
¯ p = pρgA = ϕ̄D + KL
6
j =1 ξ̄ j ϕ̄ j ,
where K = ω2/g and
ϕ̄D = ϕDigA/ω
, ϕ̄ j = ϕ jLn +1
with n = 0 for j = 1, 2, 3 and n = 1 for j = 4, 5, 6.The body pressure can be evaluated separately for the diffraction or radiation prob-
lems by assigning the conguration parameters INUMOPT5=1 and/or INUMOPT6=1,as explained in Section 4.7. When the radiation components are output separately, thenondimensional pressure due to j th mode is dened by
¯ p j = p
ρgξ j Ln = KL ϕ̄ j
Special denitions are required in the limits of zero and innite wave periods, as ex-plained in Section 3.9.
3–6
-
8/9/2019 WAMIT V70 Manual
29/359
3.6 FREE-SURFACE ELEVATION
The free surface elevation is obtained from the dynamic free-surface condition
η = −1g
∂ϕ∂t z =0
,
and in nondimensional form
η̄ = ηA
= ϕ̄D + KL6
j =1ξ̄ j ϕ̄ j
z=0
,
where ϕ̄ is dened as in Section 3.5. (The nondimensional hydrodynamic pressure and waveelevation are equal to the nondimensional velocity potential at the respective positions.)
These parameters can be evaluated separately for the diffraction or radiation prob-lems by assigning the conguration parameter INUMOPT6=1, as explained in Section 4.7.When the radiation components are output separately, the nondimensional free-surfaceelevation due to j th mode is dened by
η̄ j = ηξ j Ln
= KL ϕ̄ j
where n = 0 for j = 1, 2, 3 and n = 1 for j = 4, 5, 6.The evaluation of the pressure or free-surface elevation requires special caution close
to the body surface. Within a distance on the order of the dimensions of the adjacent
panel(s), eld-point quantities cannot be computed reliably. More specic limits can beascertained by performing a sequence of computations and studying the continuity of theresult. Approaching the body along a line normal to the centroid of a panel will minimizethis problem. See Reference [12] regarding the computation of run-up at the intersectionof the body and free surface.
3–7
-
8/9/2019 WAMIT V70 Manual
30/359
-
8/9/2019 WAMIT V70 Manual
31/359
-
8/9/2019 WAMIT V70 Manual
32/359
In Options 7 and 9, the mean drift force and moment evaluated from pressure integrationand from momentum ux on a control surface are dened with respect to the body coor-dinate system. Conversely, the mean drift force and moment evaluated from momentumconservation in Option 8 are dened with respect to the global coordinate system.
3.9 ZERO AND INFINITE WAVE PERIODS
It is possible to evaluate the added mass (Option 1), and also the pressure and uidvelocity (Options 5 and 6) in the limiting cases of zero and innite period (or equivalently,innite and zero frequency), by inputting PER=0.0 and PER < 0.0 in the POT le (seeSection 4.2). This extension is particularly important in the context of evaluating thecorresponding time-domain impulse response functions, as explained in Chapter 13 .
The denition of the added-mass coefficients is the same as shown in Section 3.2. All
other force coefficients are zero in these limits, with the exception of the heave excitingforce and horizontal exciting moments, which tend to nonzero hydrostatic limits at zerofrequency.
Special denitions are applied to the radiation pressure and velocity in the case of zero frequency (innite wave period), which is identied in the output les by a negativevalue of the parameter PER, and also in the case of innite frequency (zero wave period),which is identied by PER=0. In general, for nonzero nite values of the frequency, thenondimensional outputs for the radiation pressure and velocity are as dened in Sections3.5 and 3.7. Thus the output pressure for each radiation mode is KL ϕ̄ j and the outputvelocity for each mode is KL ¯∇ϕ̄ j . However for the two limiting cases, where KL = 0 orKL =
∞, the factor KL is omitted from the outputs for Options 5 and 6. The following
table summarizes these denitions:
frequency period pressure velocity
PER < 0 ω = 0 ∞ ϕ̄ j ¯∇ϕ̄ j0 < PER < ∞ 0 < ω < ∞ (2π/ω ) KL ϕ̄ j KL ¯∇ϕ̄ j
PER=0 ω = ∞ 0 ϕ̄ j ¯∇ϕ̄ j
3–10
-
8/9/2019 WAMIT V70 Manual
33/359
Chapter 4
INPUT FILES
A typical application of the WAMIT program will consist of (a) preparing appropriateinput les; (b) running WAMIT; and (c) using the resulting output les. Most of therequired input les are ‘generic’, with the same format and data irrespective of whetherthe low-order or high-order method is used. These les are described in this Chapter. Theprincipal exception is the geometric data le (GDF), which is described separately for thetwo methods in Chapters 6 and 7 respectively. To simplify the presentation this Chapterwill describe the required input les for a basic application involving the analysis of a singlebody. Further information is given in Chapters 8-10 for the appropriate modications of the input les for specic purposes, including the analysis of multiple bodies, generalizedmodes of body motion, and the removal of irregular-frequency effects.
The execution of a WAMIT run is divided between two subprograms, POTEN and
FORCE, as explained in Chapter 1 . In special circumstances it is useful to run WAMITand execute only one of the two subprograms, using the optional parameters IPOTEN=0or IFORCE=0 to skip the corresponding subprogram execution. These parameters canbe input in the conguration le, as explained below in Section 4.7. In the default case(IPOTEN=1, IFORCE=1) both subprograms are executed sequentially in the same run.
The input les fnames.wam , config.wam , and break.wam use reserved lenames with theextension .wam. All of the other input les are identied by three user-dened lenames gdf , pot, and f rc . These are respectively the lenames used for the Geometry Data File (GDF),Potential Control File (POT), and Force Control File (FRC). Other input/output les areassigned the same lenames, depending on their context, and with different extensions.Thus gdf is used for les which relate primarily to a specic body geometry, pot to outputles from POTEN which are associated with a specic set of inputs in the POT le, andfrc to output les from FORCE which are associated with a specic set of inputs in theFRC le. Some input les are used only by POTEN or FORCE, whereas other input lesare used by both. In this User Manual the font fnames.wam indicates a specic lenameand extension, usually in lower-case letters. Upper case letters such as GDF are used moregenerally, to abbreviate the type of le. Filenames in italics, e.g. pot.p2f and f rc .out referto the user-dened lenames of the POT and FRC les, from which the output les derivetheir own lenames.
4–1
-
8/9/2019 WAMIT V70 Manual
34/359
The following table lists all of the input les which may be prepared by the user, andindicates the relevant subprogram(s):
Filename Usage Description
pot.pot POTEN Potential Control File ( Sections 4.2)gdf .gdf POTEN Geometric Data File (Chapters 6,7)frc .frc FORCE Force Control File ( Sections 4.3-4)gdf .spl POTEN Spline Control File ( Section 7.11)fnames.wam POTEN/FORCE Filenames list ( Section 4.8)break.wam POTEN Optional le for runtime breakpoints ( Section 4.12)config.wam POTEN/FORCE Conguration le ( Section 4.7)
∗.cfg POTEN/FORCE Conguration le ( Section 4.7)gdf .ms2 POTEN MultiSurf geometry le ( Section 7.7)gdf .csf FORCE Control surface geometry le ( Section 11.1)
gdf .bpi FORCE Specied points for body pressure ( Section 4.6)frc .rao FORCE External RAO le ( Section 4.13)
The rst three input les are required in all cases. The others are required in some casesor are optional, as explained below.
The following table lists the output les which are produced by each subprogram:Filename Program Description
pot.p2f POTEN P2F File (binary data for transfer to FORCE)errorp.log POTEN Error Log File ( Section 5.8)errorf.log FORCE Error Log File ( Section 5.8)wamitlog.txt POTEN/FORCE Log le of inputs ( Section 5.9)frc .out FORCE Formatted output le ( Section 5.1)frc .num FORCE Numeric output les ( Section 5.2)gdf pan.dat POTEN Panel data le ( Section 5.7)gdf pat.dat POTEN Patch data le ( Section 5.7)gdf .pnl FORCE Panel data le ( Section 5.7)gdf .hst FORCE Hydrostatic data le ( Section 5.6)rgklog.txt POTEN/FORCE MultiSurf log le ( Appendix C )frc .fpt FORCE List of eld points ( Section 5.2)gdf .idf POTEN Interior free-surface panels ( Section 10.1)gdf .bpo FORCE Specied points for body pressure ( Section 5.5)gdf low.gdf POTEN Low-order GDF le ( Section 5.7)gdf csf.dat FORCE Control surface data le ( Section 11.6)gdf low.csf FORCE Low-order control surface le ( Section 11.6)
The structure of input and output les is illustrated in the ow chart shown in Figure 1.1.The lenames assigned to the various output les are intended to correspond logically withthe pertinent inputs, and to simplify le maintenance.
The primary generic data les are the two ‘control les’ input to POTEN and FORCE.These are referred to as the Potential Control File (POT), with the extension .pot , and
4–2
-
8/9/2019 WAMIT V70 Manual
35/359
the Force Control File (FRC), with the extension .frc .All WAMIT input les are ASCII les. The rst line of most les is reserved for a user-
specied header, consisting of up to 72 characters which may be used to identify the le.
If no header is specied a blank line must be inserted to avoid a run-time error reading thele. The remaining data in each le is read by a sequence of free-format READ statements.Thus the precise format of the input les is not important, provided at least one blankspace is used to separate data on the same line of the le. Further details regarding theformats and names of les are contained in Section 4.10.
Following the implicit FORTRAN convention, parameter names beginning with I,J,K,L,M or N denote integers, and all other numeric parameters are represented by real (decimalformat) numbers. It is good practice to represent real numbers including a decimal point,and not to use a decimal point for integer parameters.
Additional input les may be used to select various options, and to optimize the com-putations for specic applications. The le fnames.wam is used to specify the names of the CFG, POT, and FRC input les to avoid interactive input of these names (see Section4.8). The conguration les config.wam and pot.cfg are used to congure WAMIT and tospecify various options, as described in Section 4.7. The optional input le break.wam maybe used to set break points in the execution of POTEN, as described in Section 4.12. Theoptional Spline Control File gdf .spl may be used in the higher-order method, as describedin Section 7.11.
The input le userid.wam is read by both POTEN and FORCE, to identify the licenseefor output to the headers at run time, and to write this information in the header of the.out output le. This le is prepared by WAMIT, Inc., and must be available for inputto POTEN and FORCE at runtime. To be available for input, the le userid.wam must
either be copied to the default directory with other input/output les, or else the pathnameindicating the resident directory must be listed in one of the conguration les, as explainedin Sections 2.1 and 4.7.
Two alternative formats for the FRC les are described separately in Sections 4.3-4. Fora rigid body which is freely oating, and not subject to external constraints, AlternativeForm 1 (Section 4.3) may be used, with the inertia matrix of the body specied in termsof a 3×3 matrix of radii of gyration. Alternative Form 2 ( Section 4.4) permits inputs of up to three 6 ×6 mass, damping, and stiffness matrices to allow for a more general bodyinertia matrix, and for any linear combination of external forces and moments. (A thirdalternative format may be used for multiple bodies, as described in Section 8.5.)
Several output les are created by WAMIT with assigned lenames. The output fromPOTEN for use by FORCE is stored in the P2F le (Poten to Force) and automaticallyassigned the extension .p2f . The nal output from FORCE is saved in a le with theextension OUT which includes extensive text, labels and summaries of the input data.FORCE also writes a separate numeric output le for the data corresponding to eachrequested option, in a more suitable form for post-processing; these les are distinguishedby their extensions, which correspond to the option numbers listed in the table in Section4.3.
4–3
-
8/9/2019 WAMIT V70 Manual
36/359
Additional numeric output les are generated for the exciting forces using Option 2 orOption 3, to provide data for the separate Froude-Krylov and scattering components of these forces, as explained in Section 5.3.
Two additional numeric les are generated when the FRC le species either Option 5(pressure and uid velocity on the body surface) or Option 6 (pressure and uid velocity ateld points in the uid), to assist in post-processing of these data. For Option 5 a ‘panelgeometry’ le with the extension .pnl is created with data to specify the area, normalvector, coordinates of the centroid, and moment cross-product for each panel on the bodysurface. For Option 6 the ‘eld point’ le with the extension .fpt species the coordinatesof the eld points in the uid.
4–4
-
8/9/2019 WAMIT V70 Manual
37/359
-
8/9/2019 WAMIT V70 Manual
38/359
program are in Appendix B . This program is intended to work for all input les whichwere valid in Version 6. However it is impossible to test the program with all possiblecombinations of inputs. Users should verify the changes made by the utility, especially if error messages occur running the new les.
4–6
-
8/9/2019 WAMIT V70 Manual
39/359
4.2 THE POTENTIAL CONTROL FILE
The POT le is used to input various parameters to the POTEN subprogram. The name
of this le can be any legal lename accepted by the operating system, with a maximumlength of 16 ASCII characters, followed by the extension .pot .In Version 7 the following format is used for the data in this le:
headerHBOTIRAD IDIFFNPERPER(1) PER(2) PER(3)...PER(NPER)NBETABETA(1) BETA(2) BETA(3) ... BETA(NBETA)NBODYGDF(1)XBODY(1,1) XBODY(2,1) XBODY(3,1) XBODY(4,1)MODE(1,1) MODE(2,1) MODE(3,1) MODE(4,1) MODE(5,1) MODE(6,1)GDF(2)XBODY(1,2) XBODY(2,2) XBODY(3,2) XBODY(4,2)MODE(1,2) MODE(2,2) MODE(3,2) MODE(4,2) MODE(5,2) MODE(6,2)
···GDF(NBODY)XBODY(1,NBODY) XBODY(2,NBODY) XBODY(3,NBODY) XBODY(4,NBODY)MODE(1,NBODY) MODE(2,NBODY) MODE(3,NBODY) ... MODE(6,NBODY)
The data shown on each line above is read consecutively by corresponding read state-ments. Thus it is necessary to preserve the line breaks indicated above, but if a largenumber of periods (PER) and/or wave heading angles (BETA) are input, these may beplaced on an arbitrary number of consecutive lines.
The denition of each variable in the Potential Control File is as follows:
‘header’ denotes a one-line ASCII header dimensioned CHARACTER ∗72. This line isavailable for the user to insert a brief description of the le, with a maximum length of 72characters (including leading blanks).
HBOT is the dimensional water depth. By convention in WAMIT, a value of HBOTless than or equal to zero is interpreted to mean that the water depth is innite. It isrecommended to set HBOT=-1. in this case. If HBOT is positive it must be within therange of values
10− 5 < HBOT ×ω2/g < 105where ω is the radian frequency of the incident waves and g=GRAV is the gravitational
4–7
-
8/9/2019 WAMIT V70 Manual
40/359
-
8/9/2019 WAMIT V70 Manual
41/359
-
8/9/2019 WAMIT V70 Manual
42/359
-
8/9/2019 WAMIT V70 Manual
43/359
-
8/9/2019 WAMIT V70 Manual
44/359
-
8/9/2019 WAMIT V70 Manual
45/359
-
8/9/2019 WAMIT V70 Manual
46/359
-
8/9/2019 WAMIT V70 Manual
47/359
-
8/9/2019 WAMIT V70 Manual
48/359
-
8/9/2019 WAMIT V70 Manual
49/359
-
8/9/2019 WAMIT V70 Manual
50/359
-
8/9/2019 WAMIT V70 Manual
51/359
-
8/9/2019 WAMIT V70 Manual
52/359
-
8/9/2019 WAMIT V70 Manual
53/359
-
8/9/2019 WAMIT V70 Manual
54/359
-
8/9/2019 WAMIT V70 Manual
55/359
4.6 BODY PRESSURE AND FLUID VELOCITY AT SPECI-FIED POINTS
If IOPTN(5) > 0 the points on the body surface where the pressure and uid velocity areevaluated depend on the parameter IPNLBPT in the conguration le. In the default caseIPNLBPT=0, these points are at the panel centroids in the low-order method (ILOWHI=0)or at a set of uniformly-spaced parametric points on each patch in the higher-order method(ILOWHI=1).
If IPNLBPT = 0 the body pressure is evaluated at points on the body which are speciedby the user in a special input le gdf .bpi (Body Point Input). The format of this le is asfollows:
headerNBPTX(1) Y(1) Z(1)X(2) Y(2) Z(2)..X(NBPT) Y(NBPT) Z(NBPT)
The lename of this le must be the same as the lename of the GDF le.If IPNLBPT > 0, the data in the .bpi le is read and interpreted to be in dimensional
body-xed coordinates. If IPNLBPT < 0, the data in the .bpi le is read and interpretedto be in dimensional global coordinates.
The procedure used to evaluate the body pressure at these specied points is different inthe low-order (ILOWHI=0) and higher-order (ILOWHI=1) solutions. These are describedseparately below.
If ILOWHI=0, the solution is based on piecewise constant values of the potential oneach panel based on colocation at the panel centroids. In order to evaluate the pressureat other points an interpolation procedure is adopted. This interpolation is based on theabsolute value of the input parameter IPNLBPT. IPNLBPT=4 is recommended, when theinput points are in body-xed coordinates. In this case the program searches and identiesthe four nearest panel centroids to each specied input point, and assigns weights to eachof these panels based on the (inverse) distance to each centroid.
In the higher-order method (ILOWHI=1) the solution for the velocity potential andpressure is represented by continuous B-splines on each patch. For each specied inputpoint ( x,y,z ) the program searches for the patch index and parametric coordinates ( U, V )of the point on this patch which is closest to the input point. The pressure and velocityare evaluated at the corresponding point ( U, V ). An iterative procedure is used to nd(U, V ), with a specied convergence tolerance of 1.0E-4 for the radial distance in nondi-mensional Cartesian coordinates. (When the length scale of the patch is larger than 1.0the tolerance is increased by a factor equal to this length scale, estimated from the Jaco-
4–23
-
8/9/2019 WAMIT V70 Manual
56/359
bian of the parametric transformation at the center of the patch.) A warning message isgenerated if nonconvergence occurs for one or more input points, showing the total numberof unconverged points. (See also Section 5.5.)
The pressure and velocity are output in the .5p and .5v ∗les as explained in Section 5.5.Data related to the coordinates of the evaluation points are tabulated in the supplementaryoutput le gdf .bpo which is explained in the same Section.
In both the low-order and higher-order implementations, the input data in the .bpi leshould correspond to points which lie as close as possible to the body surface. If points inthe BPI les are very close to intersections of adjacent patches in the higher-order method,the index NP in the BPO le should be checked to verify that the correct patch is used,especially in cases where there is ambiguity between the pressure on a conventional patchand the pressure jump on a dipole patch. Similarly, in the low-order method, the panelindices, N1, N2, ... in the BPO le can be checked to verify the corresponding output atthe points in BPI les is the pressure obtained from those on the conventional body panelsor the pressure jump on the dipole panels.
4–24
-
8/9/2019 WAMIT V70 Manual
57/359
-
8/9/2019 WAMIT V70 Manual
58/359
-
8/9/2019 WAMIT V70 Manual
59/359
The default value is IALTFRC=1.
IBODYW is an integer specifying the body number of the rst body which representsa wavemaker in a wall (see Section 12.3).The default value is IBODYW= 0: No wavemakers are present in walls.
IFIELD ARRAYS is an integer parameter specifying if uniform arrays of eld points areassigned in the FRC control le, using a compressed format as explained in Section 4.11.IFIELD ARRAYS= 0: Field point data is assigned only as shown in the conventional FRCles, as explained in Sections 4.3 and 4.4.IFIELD ARRAYS= 1: Additional eld point data is assigned in the conventional FRCles, as explained in Section 4.11.The default value is IFIELD ARRAYS= 0.
IFORCE is an integer parameter specifying if the FORCE subprogram is executed duringthe WAMIT run.IFORCE= 0: Do not execute FORCE.IFORCE= 1: Execute FORCE.IFORCE= 2: Execute FORCE and POTEN simultaneously for each wave period (seeSection 4.14).The default value is IFORCE= 1.
IGENMDS is an integer parameter specifying the option to input the geomeric dataassociated with the mode shapes of generalized modes, when NEWMDS > 0. The details
on the use of the generalized mode option are described in Chapter 9 .IGENMDS= 0: use a seperate program DEFMOD to input the geometric data for gen-eralized modes. This option can be used only with the low order method (ILOWHI=0).In this case the user prepares a subroutine in DEFINE to describe the generalized modeshapes.IGENMDS= 0: use a DLL le containing the subroutine NEWMODES. The user modiesNEWMODES to specify the mode shape. This option can be used with both the low- andhigher-order options.The default value is IGENMDS= 0.ILOG is an integer parameter specifying the option to integrate the logarithmic singularityin the Green function separately, with a more accurate numerical integration scheme.ILOG= 0: The logarithmic singularity is included with the wavelike component of theGreen function and is integrated by quadrature over each panel.ILOG= 1: The logarithmic singularity in the Green function is subtracted and integratedanalytically for pairs of panels for which the Rankine image singularity 1 /r is also inte-grated analytically. (This option produces more accurate results.)The default value is ILOG= 0.
4–27
-
8/9/2019 WAMIT V70 Manual
60/359
ILOG=1 is required when panels are dened in the plane of the free surface, including thefollowing two cases: (1) bodies with horizontal physical surfaces lying in the plane of thefree surface, and (2) use of the irregular frequency option, where panels are located on theinterior free surface inside the body waterline. In these two cases, execution of the programis interrupted with an error message if ILOG=0.ILOWGDF is an integer parameter specifying the option to generate a low-order GDFoutput le based on the input geometry (see Section 5.7). If ILOWHI=0, the originalinput panels are used. If ILOWHI=1 the low-order output panels are generated from thepanels of the higher-order geometry. If ILOWGDF > 1, the panels are subdivided intoILOWGDF ×ILOWGDF sub-panels.ILOWGDF= 0: Do not generate the output le gdf LOW.GDF.ILOWGDF ≥ 1: Generate the output le gdf LOW.GDF.The default value is ILOWGDF= 0.
ILOWHI is an integer parameter specifying the use of the low-order or higher-order panelmethod.ILOWHI= 0: Low-order panel method ( Chapter 6 )ILOWHI= 1: Higher-order panel method ( Chapter 7 )
IMODESFSP is an integer parameter specifying the subroutine used to dene pressuredistributions on interior free surfaces of the body (see Section 12.5).
INUMOPT5 is an integer parameter specifying the option to evaluate the separate radi-ation and diffraction components of the body pressure and velocity (see Sections 3.5 and
3.7).INUMOPT5= 0: output the total body pressure and velocity.INUMOPT5= 1: output the total body pressure and velocity in the formatted output le(.out). Output the separate components in the numeric output les (.5p, .5vx, .5vy, .5vz).
INUMOPT6 is an integer parameter specifying the option to evaluate the separate radi-ation and diffraction components of the pressure and velocity at eld points (see Sections3.5 and 3.7).INUMOPT6= 0: output the total eld pressure and velocity.INUMOPT6= 1: output the total eld pressure and velocity in the formatted output le
(.out). Output the separate components in the numeric output les (.6p, .6vx, .6vy, .6vz).IPERIN is an integer parameter specifying the input data for PER in the POT le (seeSection 4.2).IPERIN= 1: Input periods in secondsIPERIN= 2: Input radian frequenciesIPERIN= 3: Input innite-depth wavenumbersIPERIN= 4: Input nite-depth wavenumbers
4–28
-
8/9/2019 WAMIT V70 Manual
61/359
The default value is IPERIN= 1.(The use of IPERIN is identical to the parameter IPERIO in Version 6. The name of thisparameter is changed in Version 7 to correspond with the parameter IPEROUT.)
IPEROUT is an integer parameter specifying the output data for PER. The same fouroptional values IPEROUT= 1 , 2, 3, 4 are used as dened above for the corresponding inputparameter IPERIN. The default value is IPEROUT= 1. IPEROUT controls the rstcolumn of data in the numeric output les, and also the rst column of data in the headerof the OUT le showing the runtimes and iterations for the POTEN run, as well as thesame runtime outputs to the monitor during the POTEN run.
IPLTDAT is an integer parameter specifying the option to generate the output lesgdf PAN.DAT and gdf PAT.DAT, used for plotting the panel and patch discretizations(see Section 5.7).
IPLTDAT= 0: Do not generate the output les gdf PAT.DAT and gdf PAN.DATIPLTDAT ≥ 1: Generate the output les gdf PAT.DAT and gdf PAN.DAT for plottingthe panel and patch discretizations with IPLTDAT ×IPLTDAT subdivisions.The default value is IPLTDAT= 0.
IPNLBPT is an integer parameter specifying the option to evaluate the body pressure atspecied points (x,y,z ) listed in the input le gdf .BPI.IPNLBPT= 0: output the body pressure at the panel centroids, or on a uniform parametricmesh in the higher-order method.IPNLBPT ≥ 1: output the body pressure at the points listed in the input le gdf .BPI. Thesepoints are dened with reference to the body-xed dimensional Cartesian coordinates foreach body.IPNLBPT ≤ −1: output the body pressure at the points listed in the input le gdf .BPI.These points are dened with reference to the global coordinate system.The default value is IPNLBPT= 0. When IPNLBPT =0 and ILOWHI=0, the absolutevalue of IPNLBPT species the number of panels nearest to each point specied in gdf.BPI.See Section 4.6 for further details.
IPOTEN is an integer parameter specifying if the POTEN subprogram is executed duringthe WAMIT run.IPOTEN= 0: Do not execute POTEN.IPOTEN= 1: Execute POTEN.The default value is IPOTEN= 1.
IQUADI is an integer parameter specifying the order of the inner Gauss quadratureparameter IQUI for all patches when the higher-order method is used (ILOWHI=1). Thedefault value is IQUADI=4. (See Sections 7.11-12.)
IQUADO is an integer parameter specifying the order of the outer Gauss quadrature
4–29
-
8/9/2019 WAMIT V70 Manual
62/359
parameter IQUO for all patches when the higher-order method is used (ILOWHI=1). Thedefault value is IQUADO=3. (See Sections 7.11-12 for further information.)
IREADRAO is an integer parameter specifying if the RAO’s are to be input from anexternal le, as explained in Section 4.3.IREADRAO= 0: Use RAO’s computed by WAMIT in Option 4 to evaluate Options 5-9IREADRAO= 1: Evaluate only Options 1,2,3,4IREADRAO= 2: Read RAO’s from an external le to evaluate Options 5-9The default value is IREADRAO=0.
IRR is the integer used to specify whether the irregular frequencies are removed. The useof IRR is described in Chapter 9 .IRR= 0: Do not remove the effect of the irregular frequencies.
IRR= 1: Remove the effect of the irregular frequencies. (User needs to represent theinterior free surface by panels or patches.)IRR= 2: Remove the effect of the irregular frequencies. (Program projects the bodypanels on the interior free surface.) This option is restricted to the low-order method(ILOWHI=0).IRR= 3: Remove the effect of the irregular frequencies. (Program automatically discretizesthe interior free surface.)The default value is IRR=0.
ISCATT is an integer parameter specifying whether the diffraction or the scattering prob-lem is solved to obtain the diffraction potential. The diffraction potential may be solvedby the equation ( 15.12) which we dene as the diffraction problem. Alternatively in thescattering problem, the scattered potential is solved by ( 15.13) and the diffraction potentialis obtained from equation ( 15.8): This option is only available in the low-order method(ILOWHI=0).ISCATT= 0: Solve the diffraction problemISCATT= 1: Solve the scattering problemThe default value is ISCATT=0.
ISOLVE is an integer parameter specifying the method of solution for the linear systemsin POTEN. These three alternative methods are described in Section 14.2.ISOLVE=0: Use the iterative solverISOLVE= 1: Use the direct solverISOLVE= N (N ≥ 2) : Use the block iterative solver with N blocksISOLVE= −1 Special value used for wavemakers in planes of symmetry (See Section 12.3)The default value is ISOLVE=0.
ISOR is the integer used to specify whether the source strength is evaluated:
4–30
-
8/9/2019 WAMIT V70 Manual
63/359
ISOR=0: Do not evaluate the source strength.ISOR= 1: Evaluate the source strength.The default value is ISOR=0.The source strength is required in the low-order method (ILOWHI=0) if FORCE evaluatesthe uid velocity on the body (IOPTN(5)=2 or 3), the pressure/free-surface elevation orvelocity in the uid domain by the source formulation (IOPTN(6) < 0) and the mean driftforce and moment from pressure integration (IOPTN(9)=1 or 2). For the control-surfacedrift force and moment (IOPTN(7)=1 or 2), if ISOR=0, only the horizontal drift force andvertical moment can be evaluated using Alternative 1 (IALTCSF=1); ISOR=1 is requiredfor the other components using Alternative 1, and for all components using Alternative 2.Running POTEN with ISOR=1 requires substantially longer run time and larger scratchstorage. In the higher-order method (ILOWHI=1) all of the FORCE evaluations are madedirectly from the solution for the velocity potential, and ISOR=0 is required.
ITANKFPT is an integer parameter specifying the option to input eld point (fpt) coor-dinates in the .frc control le, either in the conventional format (default) or in the formatrequired when some or all of the eld points are located within internal tanks. The defaultvalue ITANKFPT=0 should be used except in cases where tanks are included with eldpoints inside the tanks.ITANKFPT=0: All eld points are in the exterior domain. Field points are input asspecied in Sections 4.3 and 4.4, with the coordinates of each eld point on one line, orusing the array format described in Section 4.11.ITANKFPT= 1: Field points are listed in the .frc control le with the tank numberpreceding the coordinates. Thus, in place of the XFIELD lines shown in Section 4.3, the
correponding data are input as follows:ITANK(n) XFIELD(1,n) XFIELD(2,n) XFIELD(3,n)
ITANK(n) is an integer which species the tank number containing the n’th eld point.If ITANK(n)=0, the eld point is in the exterior domain. The numbering of the tankscorresponds to the order of the NPTANK indices, as explained below.The default value is ITANKFPT=0.
ITRIMWL is the integer parameter used to specify the trimmed-waterline option (SeeSection 12.2). When ITRIMWL=1 the array XTRIM must be included for each body.
The default value is ITRIMWL=0.IWALLX0 is the integer parameter used to specify that the plane X=0 is a reecting
wall (See Section 12.4). When IWALLX0=1 the uid is bounded by a reecting wall atX=0.The default value is IWALLX0=0.
IWALLY0 is the integer parameter used to specify that the plane Y=0 is a reectingwall (See Section 12.4). When IWALLY0=1 the uid is bounded by a reecting wall at
4–31
-
8/9/2019 WAMIT V70 Manual
64/359
Y=0.The default value is IWALLY0=0.
KSPLIN is an integer parameter specifying the value of the B-spline orders KU,KV forall patches when the higher-order method is used (ILOWHI=1). The default value isKSPLIN=3. (See Sections 7.11-12 for further information.)
MAXITT is an integer parameter used to specify the maximum number of iterations inthe iterative solver (See Section 14.2).The default value MAXITT=35 is recommended for general use.
MAXMIT is the maximum number of iterations in the adaptive integration used toevaluate the momentum integral for the drift force and moment (Option 8). (The maximumnumber of integration ordinates in the azimuthal direction is 2 MAXMIT .) The default valueMAXMIT=8 is assigned unless a different value is input in the CFG le; this value isrecommended for general use.
MODLST is the integer parameter used to control the order in which the added-mass anddamping coefficients, exciting forces, and RAO’s for different modes of motion are writtento the output les. MODLST=0: Outputs are in ascending order of the modal indices.MODLST= 1: Outputs are in the order evaluated for each of the corresponding left-hand-sides.These two alternatives differ only if NLHS is greater than one. The default value isMODLST=0.
MONITR is the integer parameter used to control the display of output to the monitorduring the execution of FORCE.MONITR=0: Outputs to the monitor are abbreviated, consisting of the header text anddisplays of each wave period as it is executed. This option is convenient in long runs of FORCE with extensive lines of output, to permit monitoring the progress of the execution.MONITR= 1: Outputs of all data evaluated by FORCE are displayed on the monitorduring execution, in the same format as in the OUT le.The default value is MONITR=0.
NCPU is an integer which species the number of parallel processors (CPU’s, also knownas ‘cores’) which are available on the system. The default value NCPU=1 is applicablefor most older PC’s. The use of NCPU > 1, when this is available on the system, permitssubstantial reduction in run times (See Section 14.6).
NEWMDS is an integer parameter specifying the number of generalized modes for eachbody. The default value is NEWMDS=0. (See Chapter 9 .)
NMODESFSP is an integer array used to specify the number of modes used to dene thepressure distribution on free-surface pressure surfaces. Further details are given in Section12.5.
4–32
-
8/9/2019 WAMIT V70 Manual
65/359
NOOUT is an integer array with length 9, used to control the output to the OUT le.Each element of the array corresponds to one of the 9 options in FRC. If the element equals0, the corresponding output is omitted from the OUT le.
NOOUT(I)=0 Omit the output corresponding to IOPTN(I) in the OUT leNOOUT(I)= 1 Include the output corresponding to IOPTN(I) in the OUT leIf NOOUT is included in the conguration le all 9 integers must be specied. An exampleis shown on the next line, which species that all outputs are included in the OUT leexcept the pressures and/or uid velocities on the body panels.NOOUT= 1 1 1 1 0 1 1 1 1This option can be useful to avoid very long OUT les, since the data for option 5 isgenerally much more extensive than for the other options. The default value NOOUT(I)= 1for I = 1,..., 9 is assigned if NOOUT is not included in the conguration le. (The data foreach specied option is always included in the corresponding numeric output le, regardlessof the array NOOUT.)NPDIPOLE is an integer array used to specify the panel or patch indices of zero-thicknesselements represented by dipoles. Multiple lines of input can be used, but each line mustbegin with ‘NPDIPOLE =’. The data on these lines may specify either individual indices of each dipole panel/patch, or ranges of consecutive indices which are indicated by enclosinga pair of indices in parenthesis. The following three examples are equivalent ways of specifying that the indices 2, 4, 5, 6, 8 are dipole panels or patches:
NPDIPOLE= 2 4 5 6 8NPDIPOLE= 2 (4 6) 8
NPDIPOLE= (2 2) (4 6) (8 8)Note that parenthesis must be used to denote the lower and upper limits of a range of consecutive indices, and parentheses must not be used for any other purpose. Other ASCIIcharacters may be included on these lines, and are ignored. It is not necessary for theindividual indices or ranges to be in ascending order, except for the rst and last indicesof each range enclosed in parentheses.The Version 6 option to dene dipole panels or patches in the GDF le is not supportedin Version 7.
NPFSP is an integer array used to specify the panel or patch indices of free-surfacepressure surfaces. The data in this array are in pairs, denoting the rst and last indexfor each surface. An even number of indices must be included on each line. Each pair of indices must be enclosed in parentheses, as shown in the input le test17c.cfg . Morethan one line can be used for multiple surfaces, and/or multiple surfaces can be denedon the same line. Only integer data and parentheses are read for the array NPFSP, withspaces or other characters separating each index. Other ASCII characters may be used inaddition to the integers and parenthesis, but integers and parenthesis must be used onlyfor the inputs above. Further details are given in Section 12.5.
4–33
-
8/9/2019 WAMIT V70 Manual
66/359
NPTANK is an integer array used to specify the panel or patch indices of internal tanks.The data in this array are in pairs, denoting the rst and last index for each tank. An evennumber of indices must be included on each line. Each pair of tank indices must be enclosedin parentheses, as shown in the input le test22.cfg . More than one line can be usedfor multiple tanks, and/or multiple tanks can be dened on the same line. Only integerdata and parentheses are read for the array NPTANK, with spaces or other charactersseparating each index. Other ASCII characters may be used in addition to the integersand parenthesis, but integers and parenthesis must be used only for the inputs above. Notethat all of the panels or patches dening the interior of a tank must be contiguous, andspecied by a single pair of indices, since this is the way in which each separate tank isdened. Further details and examples are given in Section 12.1.
NUMHDR is the integer parameter used to control writing of a one-line header in thenumeric output les.
NUMHDR=0: No headers are included.NUMHDR= 1: A one-line header is included in the numeric output les specifying the lename, date, and time.The default value is NUMHDR=0.
NUMNAM is the integer parameter used to control the assignment of lenames to thenumeric output les.NUMNAM=0: Numeric lenames are assigned based on the lename of the FRC inputcontrol le. (The same lename is used for the OUT output le.)NUMNAM= 1: Numeric lenames are assigned as ‘optn’.
The default value is NUMNAM=0.PANEL SIZE is a parameter used for automatic subdivision of patches in the higher-order panel method. Further information is given in Chapter 7 .PANEL SIZE ≤ 0.0: subdivide patches into panels as specied by the parameters NU,NVin the SPL le.PANEL SIZE > 0.0: subdivide patches into panels so that the maximum length of eachpanel is approximately equal to the value of this parameter in dimensional units.The default value is