
Vti transportforum 2013-erik ström-v3
14
Chalmers University of Technology VehicletoVehicle and VehicletoInfrastructure Communica5ons Erik G. Ström Communica2on Systems Dept. of Signals and Systems Chalmers University of Technology Slide 1 Erik Ström • V2X Communication • VTI Transportforum 2013
-
Upload
erik-stroem -
Category
Technology
-
view
224 -
download
0
Transcript of Vti transportforum 2013-erik ström-v3
Chalmers University of Technology
Vehicle-‐to-‐Vehicle and Vehicle-‐to-‐Infrastructure Communica5ons
Erik G. Ström Communica2on Systems
Dept. of Signals and Systems Chalmers University of Technology
Slide 1 Erik Ström • V2X Communication • VTI Transportforum 2013
Chalmers University of Technology
Outline
• Sensor fusion for autonomous driving • Communica2on requirements: delay, reliability, scalability • Possible op2ons for vehicle-‐to-‐vehicle communica2ons: 3G vs ITS-‐G5 • Network topologies • Conclusions
Slide 2 Erik Ström • V2X Communication • VTI Transportforum 2013
Chalmers University of Technology
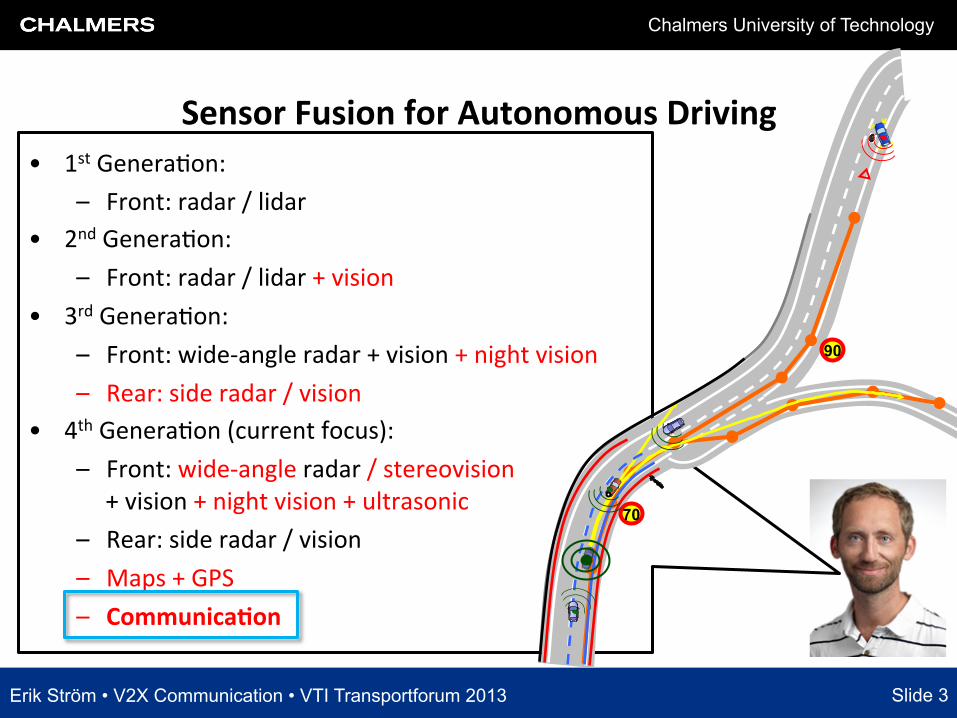
Sensor Fusion for Autonomous Driving
Slide 3 Erik Ström • V2X Communication • VTI Transportforum 2013
• 1st Genera2on: – Front: radar / lidar
• 2nd Genera2on: – Front: radar / lidar + vision
• 3rd Genera2on: – Front: wide-‐angle radar + vision + night vision – Rear: side radar / vision
• 4th Genera2on (current focus): – Front: wide-‐angle radar / stereovision
+ vision + night vision + ultrasonic – Rear: side radar / vision – Maps + GPS – Communica5on
70
90
Chalmers University of Technology
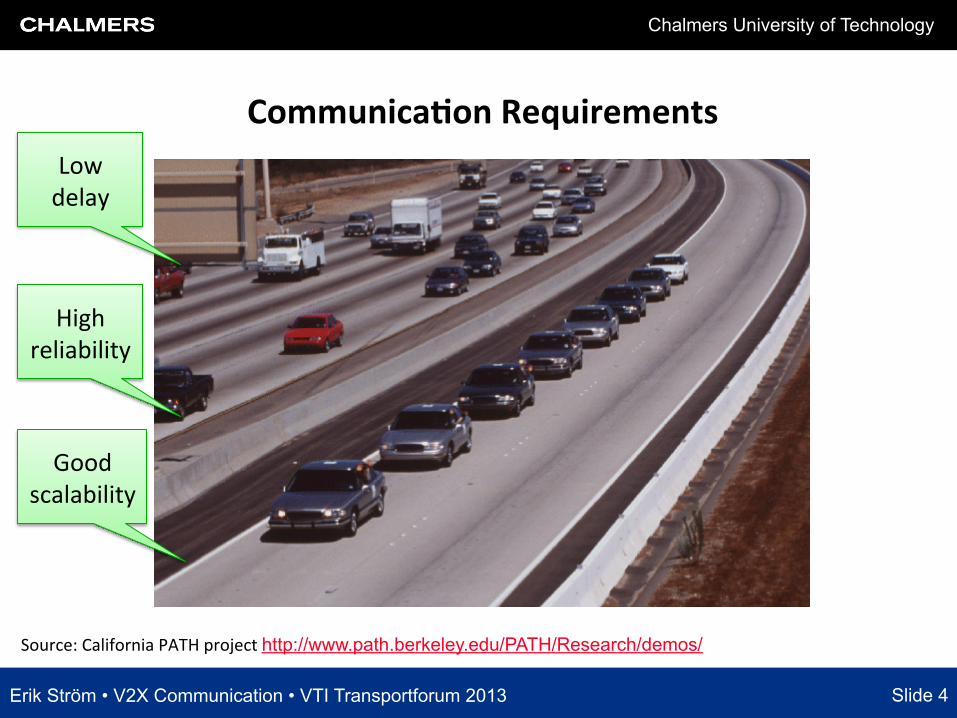
Communica5on Requirements
Source: California PATH project http://www.path.berkeley.edu/PATH/Research/demos/
Good scalability
Slide 4 Erik Ström • V2X Communication • VTI Transportforum 2013
High reliability
Low delay
Chalmers University of Technology
Scalability
Slide 5 Erik Ström • V2X Communication • VTI Transportforum 2013
!!!!
!!!!
!!!!
!!!! !!!!
!!!! !!!!
!!!!
!!!!
!!!! !!!!
!!!! !!!! !!!!
!!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!! !!!!
!!!! !!!!
!!!!
!!!!
!!!! !!!!
!!!! !!!! !!!!
!!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!! !!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
Chalmers University of Technology
Autonomous Driving and Communica5on
• Wireless communica2on is an enabler for many autonomous driving applica2ons, e.g., platooning
• Wireless communica2on is never ideal (zero delays and zero errors), which can cause severe problems
• For example, string stability in platooning can be seriously affected by communica2on delays [1]
• Hence, – Control algorithms must take into account communica2on delay
and packet errors, and – Communica2on systems must be beaer at controlling delays – Perhaps the above should be done jointly?
Slide 6 Erik Ström • V2X Communication • VTI Transportforum 2013
[1] X. Liu, A. Goldsmith, S. S. Mahal, and J. K. Hedrick. "Effects of communication delay on string stability in vehicle platoons." In Proc. IEEE Intelligent Transportation Systems, pp. 625-630. 2001.
Chalmers University of Technology
Slide 7 Erik Ström • V2X Communication • VTI Transportforum 2013
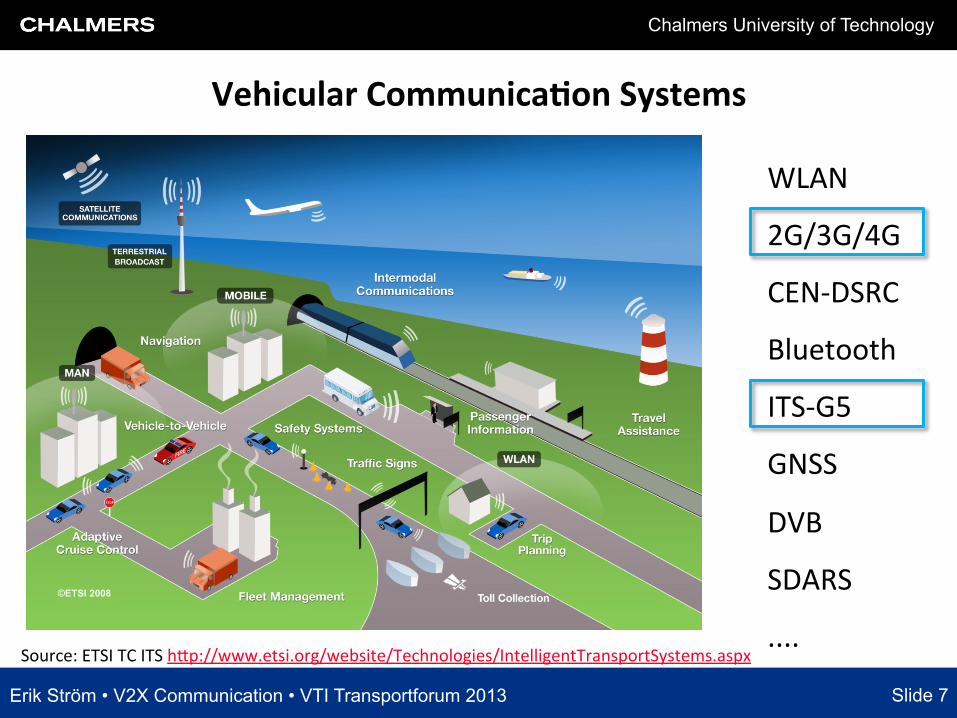
Source: ETSI TC ITS hap://www.etsi.org/website/Technologies/IntelligentTransportSystems.aspx
WLAN
2G/3G/4G
CEN-‐DSRC
Bluetooth
ITS-‐G5
GNSS
DVB
SDARS
....
Vehicular Communica5on Systems
Chalmers University of Technology
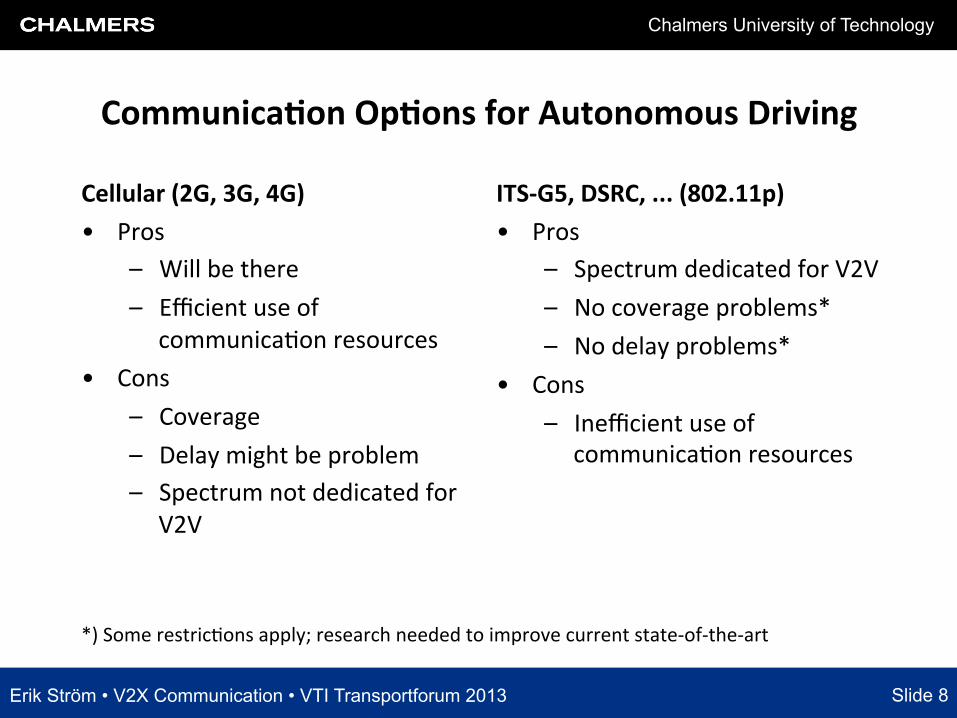
Communica5on Op5ons for Autonomous Driving
Cellular (2G, 3G, 4G) • Pros
– Will be there – Efficient use of
communica2on resources • Cons
– Coverage – Delay might be problem – Spectrum not dedicated for
V2V
ITS-‐G5, DSRC, ... (802.11p) • Pros
– Spectrum dedicated for V2V – No coverage problems* – No delay problems*
• Cons – Inefficient use of
communica2on resources
Slide 8 Erik Ström • V2X Communication • VTI Transportforum 2013
*) Some restric2ons apply; research needed to improve current state-‐of-‐the-‐art
Chalmers University of Technology
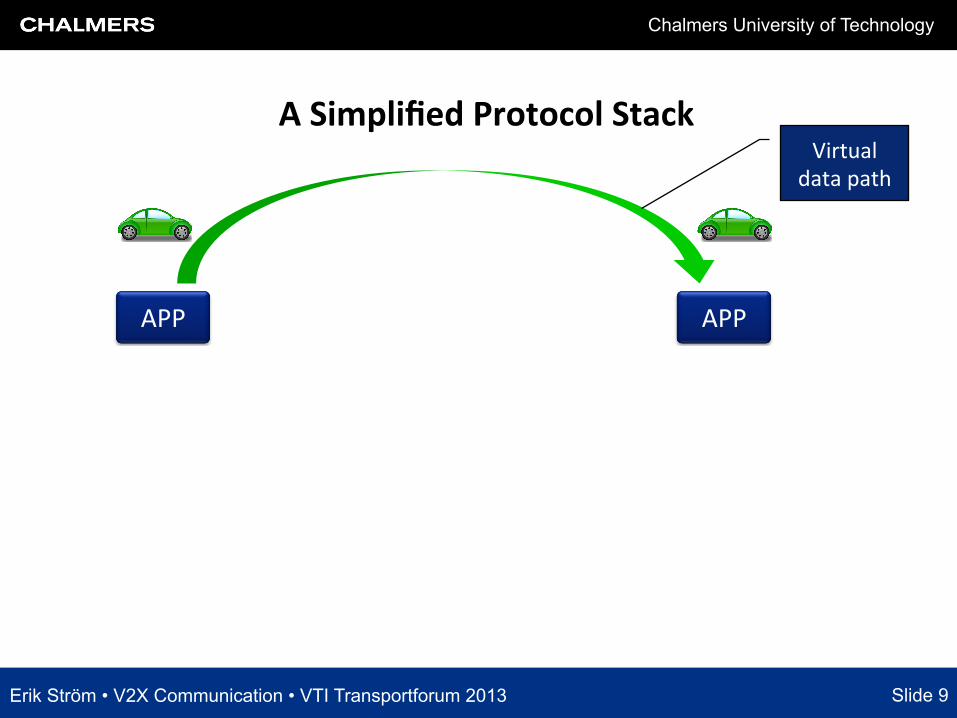
A Simplified Protocol Stack
APP
NET
MAC
PHY
APP
NET
MAC
PHY
Slide 9 Erik Ström • V2X Communication • VTI Transportforum 2013
Virtual data path
Chalmers University of Technology
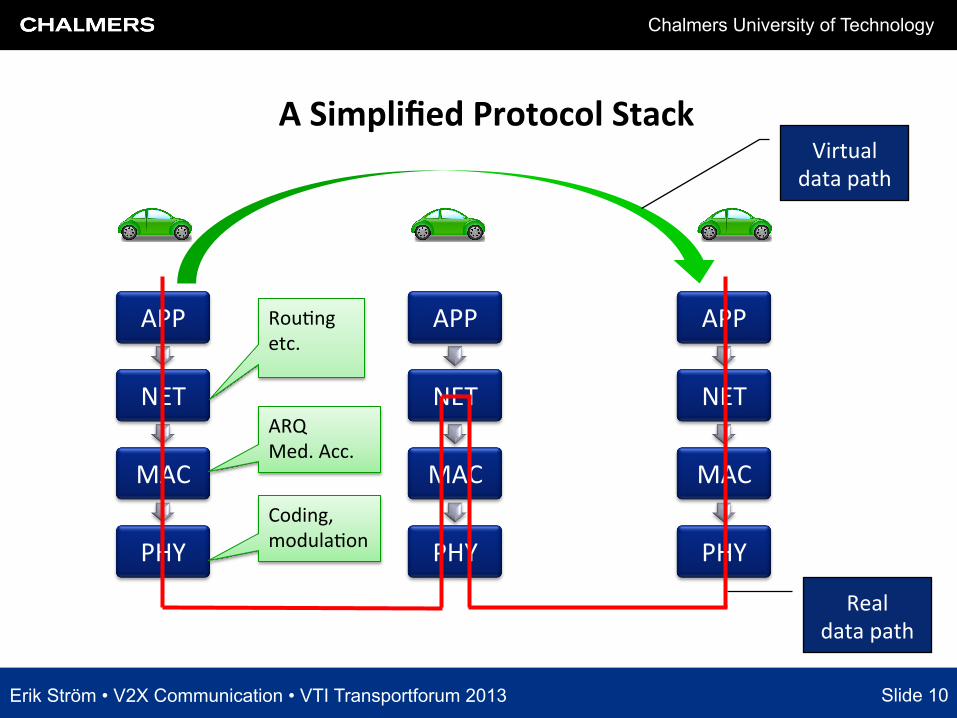
A Simplified Protocol Stack
APP
NET
MAC
PHY
APP
NET
MAC
PHY
APP
NET
MAC
PHY
ARQ Med. Acc.
Rou2ng etc.
Coding, modula2on
Slide 10 Erik Ström • V2X Communication • VTI Transportforum 2013
Virtual data path
Real data path
Chalmers University of Technology
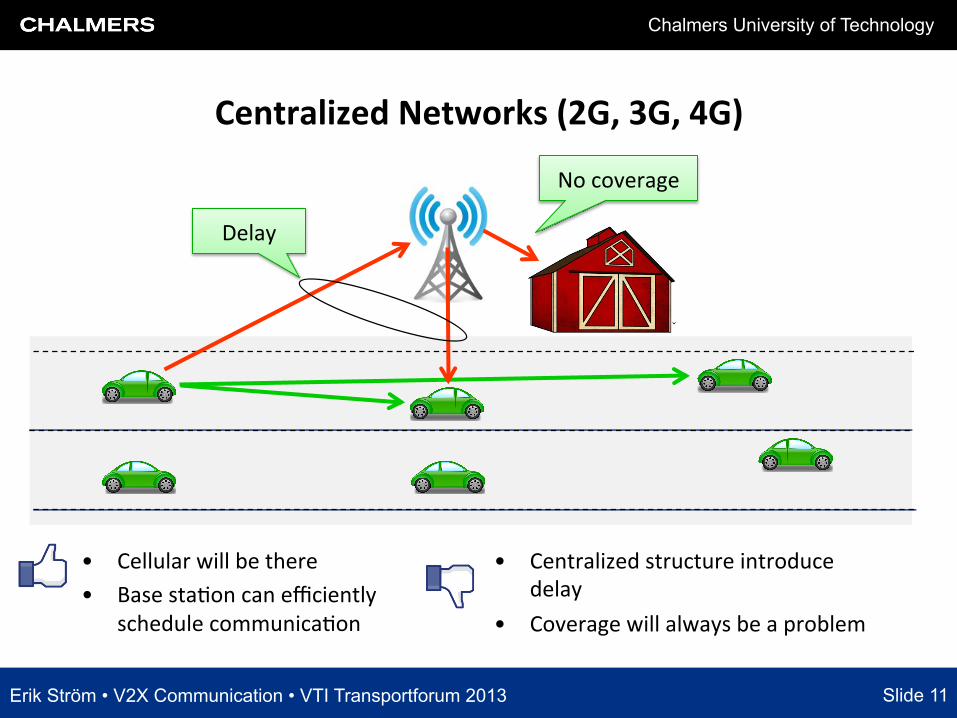
Centralized Networks (2G, 3G, 4G)
• Cellular will be there • Base sta2on can efficiently
schedule communica2on
Slide 11 Erik Ström • V2X Communication • VTI Transportforum 2013
No coverage
Delay
• Centralized structure introduce delay
• Coverage will always be a problem
Chalmers University of Technology
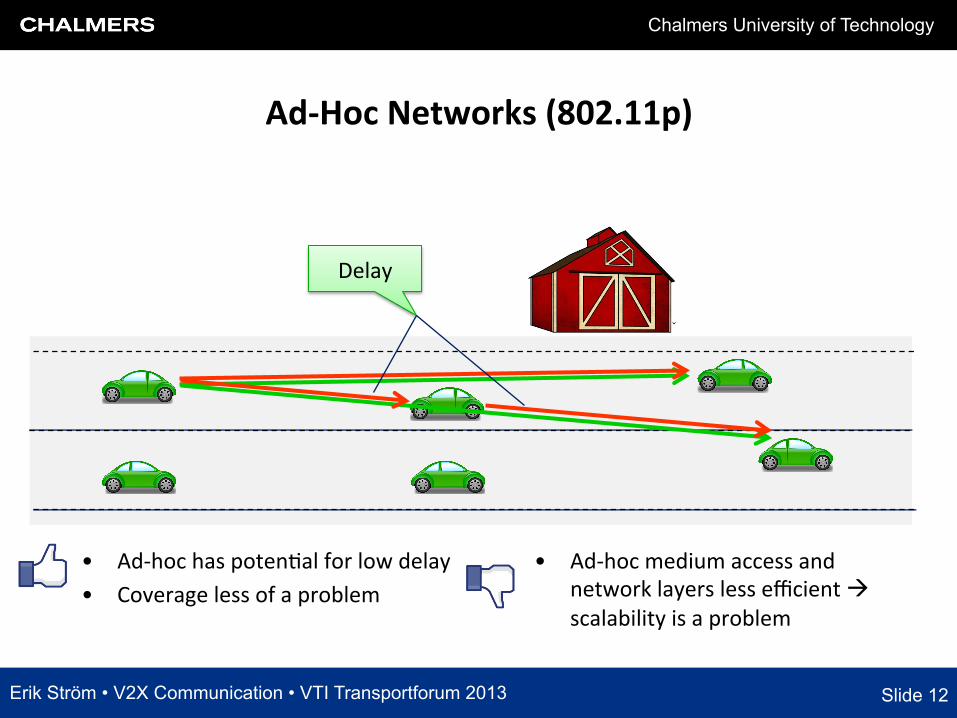
Ad-‐Hoc Networks (802.11p)
Slide 12 Erik Ström • V2X Communication • VTI Transportforum 2013
• Ad-‐hoc has poten2al for low delay • Coverage less of a problem
• Ad-‐hoc medium access and network layers less efficient à scalability is a problem
Delay
Chalmers University of Technology
Conclusions
• V2V communica2on can be provided by many systems (3G, ITS-‐G5, ...) • Direct V2V communica2on is based on 802.11p (WLAN technology)
and is known by many names: ITS-‐G5, DSRC • Communica2on requirements for autonomous driving
– Low delays – Good scalability
• Cellular systems have problems with coverage and latency – Latency will decrease in future genera2ons
• Conven2onal 802.11p does not scale well – Improvements to the MAC layer is currently under research
• Autonomous driving will require a cross-‐disciplinary effort: control, mechatronics, sensor fusion, posi2oning, communica2on, vehicular dynamics...
Slide 13 Erik Ström • V2X Communication • VTI Transportforum 2013

Chalmers University of Technology
There are s5ll things to do. Talks to us, we know the equa5ons!
Department of Signals and Systems Chalmers University of Technology
Gothenburg, Sweden
Fredrik Brännström
Paolo Falcone
Jonas Sjöberg
Erik Ström
Lennart Svensson
Henk Wymeersch
Slide 14 Erik Ström • V2X Communication • VTI Transportforum 2013


















